Embed Size (px)
Citation preview

720 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 44, NO. 3, JUNE 1995
An Application-Specific Processor Dedicated to Kalman-Filter-B ased Correction
of Spectrometric Data Andrzej Barwicz, Member, ZEEE, Daniel Massicotte, Member, ZEEE, Yvon Savaria, Member, ZEEE,
Philippe A. Pango, and Roman Z. Morawski, Member, ZEEE
Abstract- An application-specific processor dedicated to Kalman-filter-based measurand reconstruction in spectrometric applications is proposed. It is intended to act as coprocessor of a host processor, performing relatively sophisthtd process@ of measurement data subject to systematic errors of an instrumental type and to random errors of various natures. It is basically designed for improving the resdotion of q ” e t r i c measurements commoniy used in environmental laboratories, but it may be usem in other applications where similar processing of measurement data is required. Examples of applications of the processor in spectrometric measurements, its metrological advantages and limitations, as well as perspectives of its development, are presented.
I. INTRODUCTION
HE RESULTS of spectrophotometric measurements (the T absorption spectrum of a sample under study) are subject to systematic errors of an instrumental type. To take into account their total effect, the following model of the recorded spectrum y(X) is used most frequently [l]:
y(X) = g(X - X’)X(X’) dX‘ (1) -CO
where X is the wavelength, .(A) is the undistorted spectrum as it might be recorded by a perfectly resolving spectropho- tometer, and g(X) is the unnormalized incoherent optical response function, whose shape is a steep Gaussian function. Digital correction of spectrometric data consists of numerically solving (1) on the basis of measured samples of G(X), which are inevitably subject to random errors, and using an a priori identified g(X). This operation, a special case of measurand reconstruction, is as a rule numerically ill-conditioned. Con- sequently, it requires regularization [2] and-as a rule-high computational outlay.
Manuscript received March May 12, 1994; revised March 2, 1995. This work was supported by Natural Sciences and Engineering Research Council of Canada and by Canadian Microelectronics Corporation. Hewlett-Packard Canada contributed with equipment support.
A. Barwicz and P. Pango are with the Universitk du Qu6bec Trois- Rivihres, Wpartement d‘ingknierie, Trois-Rivihres, P.Q., Canada G9A 5H7. D. Massicotte and Y. Savaria are with the h o l e Polytechnique de Montreal,
Campus de l’Universit6 de Moneal, Quebec, Canada H03C3A. R. Z. Morawski is with the Warsaw University of Technology, Faculty of
Electronics, Institute of Radioelectronics, 00-665 Warsaw, Poland. IEEE Log Number 9411486.
Basically, the resolution of a spectrophotometer is deter- mined by the quality of light-diffractive and light-detecting elements. Consequently, an improvement of the resolution can be achieved by improving the technology of the diffractive elements or by increasing the number and the quality of the detecting diodes. An alternative approach is based on software correction: i.e., on the use of a digital signal processor with an algorithm of measurand reconstruction to compensate for hard- ware imperfections. This way of upgrading the spectrometer is much cheaper than implementation of the above-mentioned technological improvements.
Depending on the required accuracy, speed and reliabil- ity of measurement, one may choose general-purpose means of digital signal processing (microcontrollers, digital signal processors, field programmable gate array, etc.) or VLSI specialized processors dedicated to measurement applications. The latter become necessary if the implemented algorithms of measurand reconstruction require high computational outlay. Moreover, there are other widely recognized incentives for the integration of measuring systems: miniaturization, reliability, limited power consumption and ease of development or/and maintenance. Another justification arises if the direct associ- ation of integrated sensors with a processor is desirable in order to reduce the influence of external disturbances. Further motivation for the use of a specialized processor appears if the speed of the general-purpose digital signal processor (DSP) is not sufficient.
In order to develop an integrated specialized processor for correction of spectrometric data, several Kalman-filter- based algorithms of measurand reconstruction were developed and adapted for implementation in VLSI technology [3]-[6]. Next, an idea of the integrated structure was proposed in [7], [8]. In this paper an application-specific processor dedicated to Kalman-filter-based correction of spectrometric data is presented. The paper contains:
an external specification of the implemented Kalman-
a functional description of the proposed processor; an example of application of the processor in environ- mental measurements using both synthetic and real-world data; a discussion of the metrological advantages and limita- tions of the proposed processor.
filter-based algorithms of measurand reconstruction;
0018-9456/95$04.00 0 1995 IEEE

BARWICZ et al.: KALMAN-FILTER-BASED CORRECTION OF SPECTROMETRIC DATA 721
11. KALMAN-FILTER-BASED ALGORITHMS OF MEASURAND RECONSTRUCTION
In [3]-[6] four different algorithms for spectrometric data correction were published which are based on the use of the Kalman filter for the improved-resolution estimation of spectra or their parameters. All of them are based on an assumption that the spectrometric data
for A, = Xmin + (n - l)AX(n = 1,2, * , N), are corrupted by the errors 77, which may be adequately modeled with a sequence of random variables (77 , ) satisfying the following conditions:
Eh,] = o and E [ ~ T I ~ , ] = S,,eg for n, m = 1 ~ 2 , . . . , N (3)
where S,, is the Kronecker delta function, which is 1 for n = m and 0, otherwise.
All the algorithms are based on an assumption that the samples of the exact spectrum x(X,)(n = 1 , 2 , . . . , N) may be adequately modeled with the response of a discrete linear system to a sequence of random variables {g,} satisfying the following conditions:
E[g,] = 0 and E[gngm] = &,e: E[gn12,] = 0 (4)
for n,m = 1 , 2 , . . . , N . On the basis of the assumptions concerning {g,} and {g,}, the model of the measurement data, defined by (1) and (2), is given the form of discrete-state equations with {gn} being the input generator. The steady- state version of the Kalman filter is used for estimation of the state vector i, on the basis of the measurement data {&}:
i, = @i,-l + k w ( j ) [ & - hT!W,-1], i o = 0 (5)
using an input parameter
" 1 )
where 82 and 8; are a priori estimates of e: and e;, respectively. In (5) e is the state matrix, h is the observation state vector and kw(/3) is the vector of the steady-state Kalman gain that may be calculated in advance since it does not depend on the data {&}. The estimates (2 , ) of {x,} are extracted from the estimates of the state vector 2, in an algebraic way, including a mechanism for attenuating negative values of the solution (2 , ) ) controlled by a parameter Q E [0,1]. The sum of the negative values of 2, is an increasing function of a, assuming the zero value for Q = 0. The algorithm KAL+ described in [3] is derived under an assumption that the (1) is discretized:
where g,,gn, and x, are samples of y(X),g(X)AX, and x(X)-respectively (AX is the step of discretization along the
X-axis). This algorithm produces the estimates of x, according to the formula:
(8)
The algorithm IlXRXAL' proposed in [4] consists of an iterative use of the algorithm KAL+:
(2 , ) = KAL+({Gn}; {gn}, P, 0).
{i;} = {Gn} (9)
(2 , ) = {2,K+'} (11)
{h;} * { h i } * * . . * {h,K} {gn}. (12)
{i;+l} = KAL+({~;}; {h;} , jk, Q) for IC = 1 , 2 , . . - , K (10)
where the sequences { h:} are chosen in such a way that
n u s , the algorithm ITERXAL+ produces the estimates of x, according to the formula:
{dn} = I T E R X A L + ( { ~ , } ; { ~ ; } , ~ ~ , ~ ~ , . . . ; { h , K l , P , Q K ) . (13)
The algorithm SPLXALO+ described in [6] is derived under the assumption that the model of the data, defined by (1) and (2), is discretized using an approximation of .(A) using a cubic spline function for approximation of x(X):
(14)
where {xi')} is the sequence of the samples of the first derivative of &)(A) of .(A). Thus
.(A) = Sp13(X; {G}, {xi1)})
p,, @} = SPLXALO+({~~}; {gn}, j, (15)
The algorithm SPLXALl+ proposed in [5] is based on an additional assumption that the Laplace transform of the optical response function g(X):
is a rational function of s, i.e., N ( s ) and D(s ) are polynomials of s. This assumption makes possible significant reduction of the dimensionality of the state model of the data in compar- ison with the algorithm SPLXALO+. Using the algorithm SPLXALl+ one obtains:
{2,,2i1)} = S P L X A L ~ + ( { ~ } ; ~ , ~ , ~ , ~ ) (17)
where n and d are the vectors of the coefficients of the polynomials N ( s ) and D(s)-respectively.
HI. CHARACTERIZATION OF THE DESIGNED PROCESSOR
The implemented algorithms of measurand reconstruction are particularly suitable for integration owing to their recursive nature, as well as to the sparseness of the matrices and vectors involved. The iterative nature of the algorithm ITERXAL' reinforces the justification for the development of the special- ized processor, since it increases the computational complexity by a factor of K, if K is large (K > 10).
The general-purpose digital signal processors (DSP) avail- able on the market are intended to be versatile, and they
122 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 44, NO. 3, JUNE 1995
9'
u.y
t t ' Z m" -
v 1 -Im
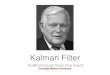
Fig. 1. The basic block diagram of the processor.
are not optimized for any particular algorithm. They perform computing operations over many cycles using only one mul- tiplier/accumulator (WA). The specialized processor should execute the algorithms described in Section II much faster than a general-purpose DSP.
The basic functional block diagram of the designed proces- sor, shown in Fig. 1, allows the effective parallel execution of matrix operations involved in the algorithms described in Section II. Eleven dedicated assembler-level instructions were defined in order to program the algorithms to be implemented. A concatenation of several instructions was used in order to obtain a horizontal instruction executable in one clock cycle. The program executing the algorithm KAL+ is composed of 64 horizontal instructions. The same set of 11 instructions can also be used for programming various algorithms of signal processing, such as FFT or digital filtering.
The word length may be optimized by the customer so as to reduce the computation time, implementation costs, energy consumption and heat dissipation, which are very important in applications relating to measuring systems.
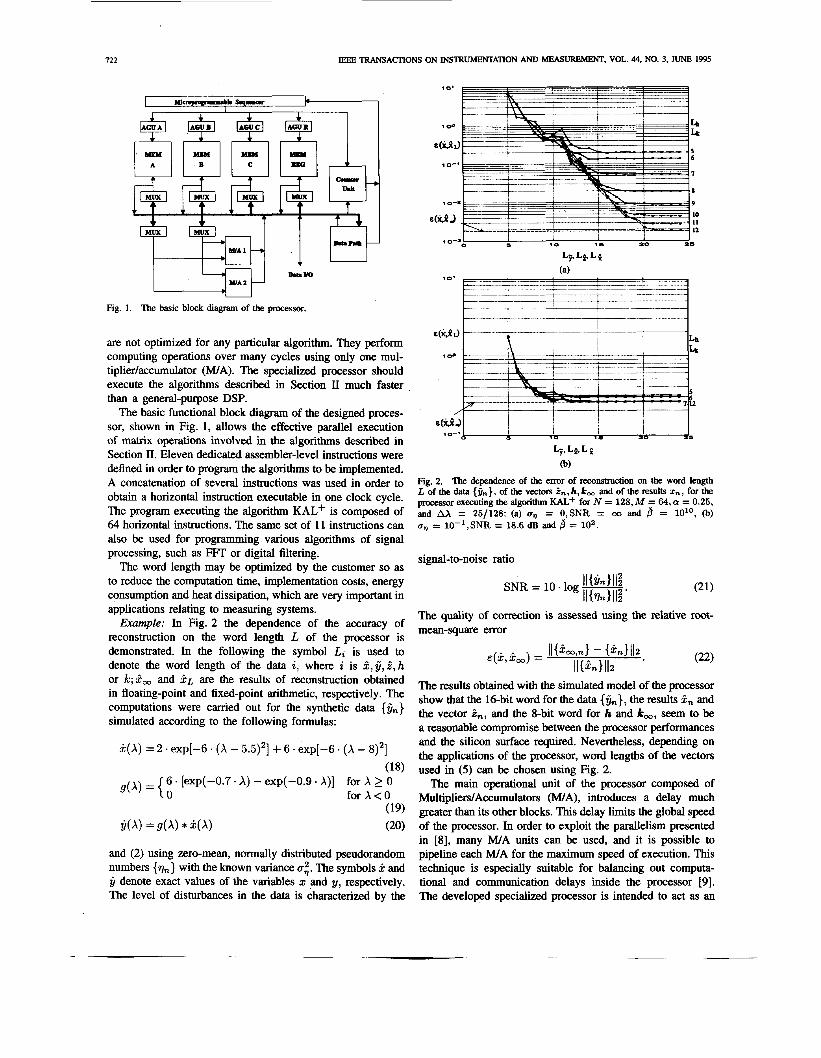
Example: In Fig. 2 the dependence of the accuracy of reconstruction on the word length L of the processor is demonstrated. In the following the symbol L, is used to denote the word length of the data i, where i is 2 , c , 2 , h or IC;&, and 2~ are the results of reconstruction obtained in floating-point and fixed-point arithmetic, respectively. The computations were carried out for the synthetic data {in} simulated according to the following formulas:
k(A) = 2 . exp[-6. (A - 5.5)2] + 6 . exp[-6. (A - S)2]
(18) 6 - [exp(-O.7. A) - exp(-O.9. A)] for A 2 0
for X < 0
and (2) using zero-mean, normally distributed pseudorandom numbers { vn} with the known variance 0:. The symbols x and j r denote exact values of the variables 2 and y, respectively. The level of disturbances in the data is characterized by the
+- i I
Fig. 2. The dependence of the error of reconstmction on the word length L of the data {fn}, of the vectors in, h, k, and of the results zn, for the processor executing the algorithm KAL+ for N = 128,M 64, a = 0.25, and AA = 25/128: (a) ow = 0,SNR = 00 and = lo'', (b) U,, = 10-',SNR = 18.6 dB and 6 = 10'.
signal-to-noise ratio
The quality of correction is assessed using the relative root- mean-square error
The results obtained with the simulated model of the processor show that the 16-bit word for the data {A}, the results &, and the vector in, and the 8-bit word for h and k,, seem to be a reasonable compromise between the processor performances and the silicon surface required. Nevertheless, depending on the applications of the processor, word lengths of the vectors used in (5 ) can be chosen using Fig. 2.
The main operational unit of the processor composed of MultiplierdAccumulators (M/A), introduces a delay much greater than its other blocks. This delay limits the global speed of the processor. In order to exploit the parallelism presented in [8], many W A units can be used, and it is possible to pipeline each W A for the maximum speed of execution. This technique is especially suitable for balancing out computa- tional and communication delays inside the processor 191. The developed specialized processor is intended to act as an
BARWCZ et al.: KALMAN-FILTER-BASED CORRECTION OF SPECTROh4ETRIC DATA 123
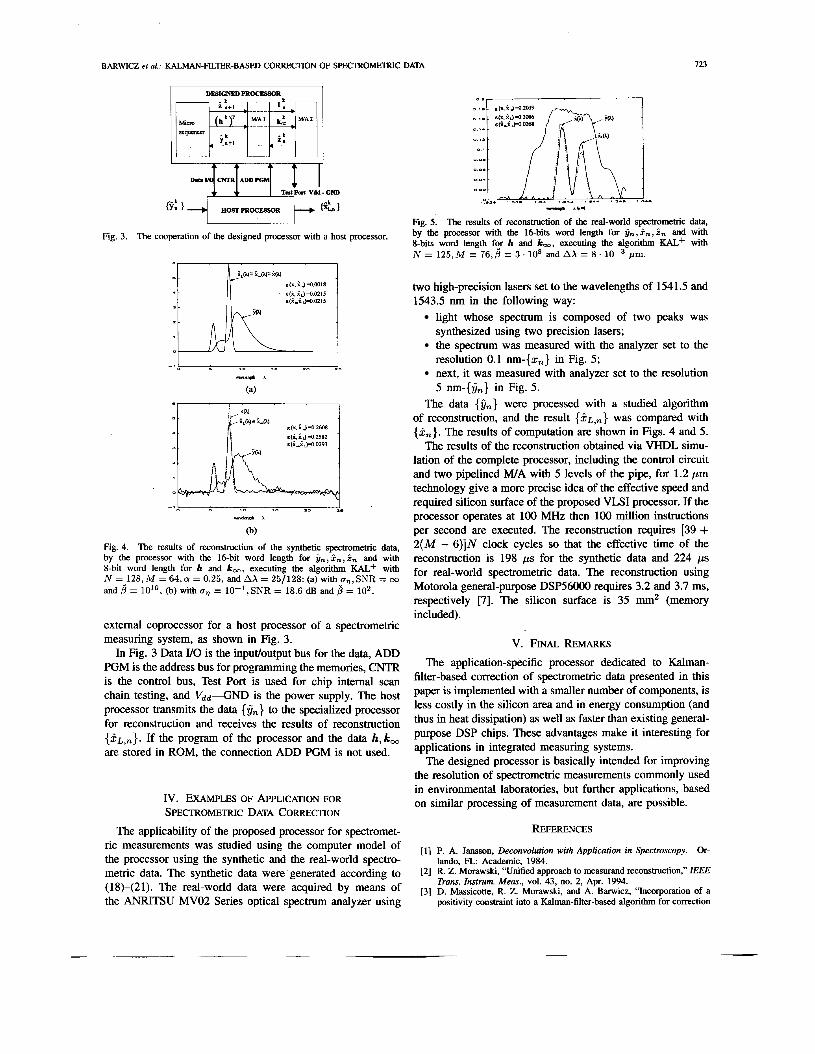
I DESIGNEDPROCESSOR I
Fig. 3. The cooperation of the designed processor with a host processor.
I 1 0 1s so 1 s
- 1
I
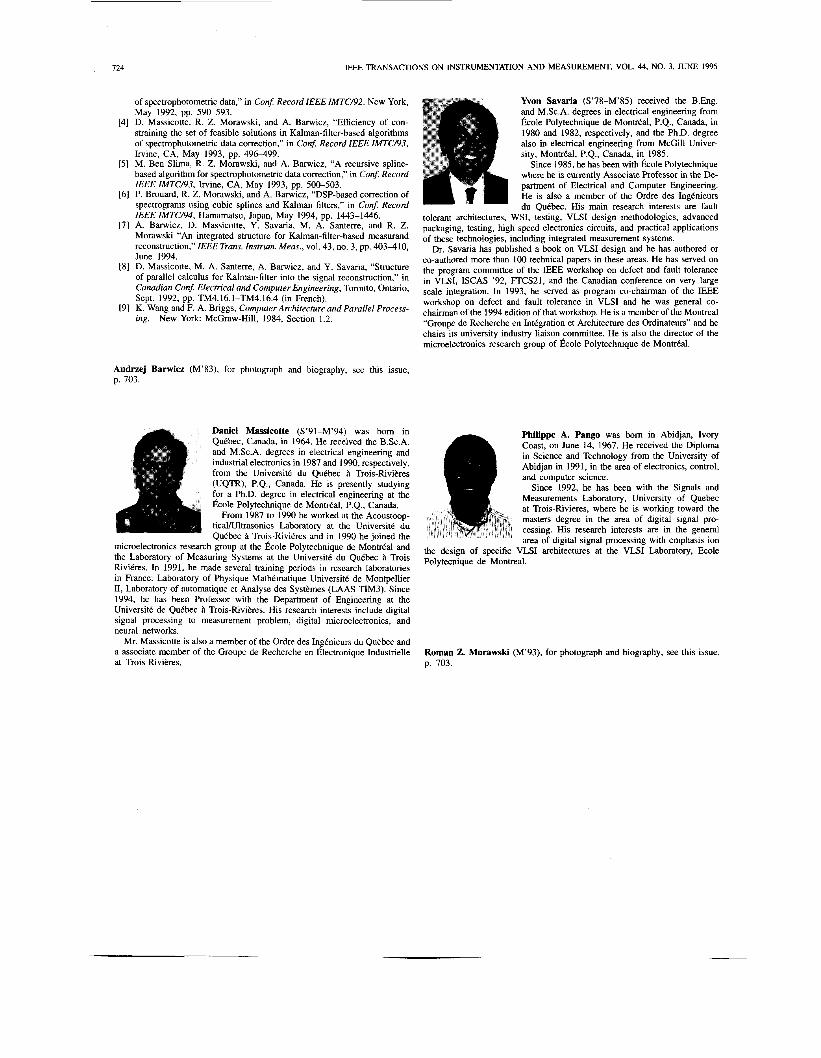
(b) Fig. 4. The results of reconstruction of the synthetic spectrometric data, by the processor with the 16-bit word length for &,?,,,in and with %bit word length for h and k,, executing the algorithm KAL+ with N = 128, M = 6 4 , a = 0.25, and AA = 25/128: (a) with uq, SNR = 00
and j = lo'', (b) with ol) = 10-',SNR = 18.6 dE3 and j = lo2.
external coprocessor for a host processor of a spectrometric measuring system, as shown in Fig. 3.
In Fig. 3 Data I/O is the input/output bus for the data, ADD PGM is the address bus for programming the memories, CNTR is the control bus, Test Port is used for chip internal scan chain testing, and V&-GND is the power supply. The host processor transmits the data {&} to the specialized processor for reconstruction and receives the results of reconstruction { 2 ~ , ~ } . If the program of the processor and the data h, k, are stored in ROM, the connection ADD PGM is not used.
Iv . EXAMPLES OF AF'PLICATION FOR SPECTROMETRIC DATA CORRECTION
- 16-1 Fig. 5. The results of reconstruction of the real-world spectrometric data, by the processor with the 16-bits word length for yn,?n,2n and with 8-bits word length for h and k,, executing the algorithm KAL+ with N = 125,M = 7 6 , o = 3.10' and AA = 8 . low3 pm.
two high-precision lasers set to the wavelengths of 1541.5 and 1543.5 nm in the following way:
light whose spectrum is composed of two peaks was
the spectrum was measured with the analyzer set to the
next, it was measured with analyzer set to the resolution
The data {&} were processed with a studied algorithm of reconstruction, and the result { i ?~ ,~} was compared with {in}. The results of computation are shown in Figs. 4 and 5.
The results of the reconstruction obtained via VHDL simu- lation of the complete processor, including the control circuit and two pipelined M A with 5 levels of the pipe, for 1.2 pm technology give a more precise idea of the effective speed and required silicon surface of the proposed VLSI processor. If the processor operates at 100 MHz then 100 million instructions per second are executed. The reconstruction requires [39 + 2(M - 6 ) ] N clock cycles so that the effective time of the reconstruction is 198 ps for the synthetic data and 224 ps for real-world spectrometric data. The reconstruction using Motorola general-purpose DSP56000 requires 3.2 and 3.7 ms, respectively [7]. The silicon surface is 35 mm2 (memory included).
synthesized using two precision lasers;
resolution 0.1 nm-{xn} in Fig. 5;
5 nm-(5,) in Fig. 5.
V. FINAL REMARKS The application-specific processor dedicated to Kalman-
filter-based correction of spectrometric data presented in this paper is implemented with a smaller number of components, is less costly in the silicon area and in energy consumption (and thus in heat dissipation) as well as faster than existing general- purpose DSP chips. These advantages make it interesting for applications in integrated measuring systems.
The designed processor is basically intended for improving the resolution of spectrometric measurements commonly used in environmental laboratories, but further applications, based on similar processing of measurement data, are possible.
The applicability of the proposed processor for spectromet- REFERENCES ric measurements was studied using the computer Of
the processor using the synthetic and the real-world spectro- metric data. The synthetic data were generated according to (18)-(21)- The real-wor1d data were acquired by means Of
the ANRlTSU MV02 Series optical spectrum analyzer using
[ l ] P. A. Jansson, Deconvolution with Application in Spectroscopy. Or- lando, n: Academic, 1984.
[21 R. Z. M o r a ~ ~ k i , "Unified approach to measurand reconstruction," IIZEE Trans. Instrum. Meas., vol. 43, no. 2, Apr. 1994.
[3] D. Massicone, R. Z. Morawski, and A. Barwicz, "Incorporation of a positivity constraint into a Kalman-filter-based algorithm for correction
IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 44, NO. 3, JUNE 1995
of spectrophotometric data,” in Con$ Record IEEE IMTCB2, New York, May 1992, pp. 590-593. D. Massicotte, R. Z. Morawski, and A. Barwicz, “Efficiency of con- straining the set of feasible solutions in Kalman-filter-based algorithms of spectrophotometric data correction,” in Con$ Record IEEE IMTCB3, Irvine, CA, May 1993, pp. 49-99, M. Ben Slima, R. Z. Morawski, and A. Banvicz, “A recursive spline- based algorithm for spectrophotometric data correction,” in Con$ Record IEEE IMTC/93, Irvine, CA, May 1993, pp. 5 W 5 0 3 . P. Brouard, R. Z. Morawski, and A. Banvicz, “DSP-based correction of spectrograms using cubic splines and Kalman filters,” in ConJ: Record IEEE IMTC/94, Hamamatsu, Japan, May 1994, pp. 143-1446. A. Banvicz, D. Massicotte, Y. Savaria, M. A. Santerre, and R. Z. Morawski “An integrated structure for Kalman-filter-based measurand reconstruction,” IEEE Trans. Instrum. Meas., vol. 43, no. 3, pp. 403-410, June 1994. D. Massicotte, M. A. Santerre, A. Banvicz, and Y. Savaria, “Structure of parallel calculus for Kalman-filter into the signal reconstruction,” in Canadian Con$ Electrical and Computer Engineering, Toronto, Ontario, Sept. 1992, pp. TM4.16.1-TM4.16.4 (in French). K. Wang and F. A. Briggs, Computer Architecture and Parallel Process- ing. New York McGraw-Hill, 1984, Section 1.2.
Andrzej Barwicz (M’83), for photograph and biography, see this issue, p. 703.
Daniel Massicotte (S’91-M’94) was born in QuCbec, Canada, in 1964. He received the B.Sc.A. and M.Sc.A. degrees in electrical engineering and industrial electronics in 1987 and 1990, respectively, from the Universitt du Qutbec B Trois-Rivibres (UQTR), P.Q., Canada. He is presently studying for a Ph.D. degree in electrical engineering at the h o l e Polytechnique de Montrtal, P.Q., Canada.
From 1987 to 1990 he worked at the Acoustoop- tical/Ultrasonics Laboratory at the Universitk du QuCbec B Trois-Rivitres and in 1990 he joined the
microelectronics research group at the &ole Polytechnique de Montdal and the Laboratory of Measuring Systems at the UniversitC du QuCbec B Trois RiviCres In 1991, he made several training periods in research laboratones in France: Laboratory of Physique-MathCmatique Universitt de Montpellier II, Laboratory of automatique et Analyse des Systbmes (LAAS-TIM3). Since 1994, he has been Professor with the Department of Engineenng at the Universitt de QuCbec B Trois-RiviBres. His research interests include digital signal processing to measurement problem, digital mcroelectronics, and neural networks.
Mr. Massicotte is also a member of the Ordre des Ingtnieurs du Qukbec and a associate member of the Groupe de Recherche en klectronique Industrielle at Trois-Rivibres.
Yvon Savaria (S’78-M’85) received the B.Eng and M.Sc.A. degrees in electncal engineering from h o l e Polytechnique de Montr6al. P.Q., Canada, in 1980 and 1982, respectively, and the Ph.D. degree also in electrical engineering from McGill Univer- sity, Montdal, P.Q., Canada, in 1985.
Since 1985, he has been with ho le Polytechnique where he IS currently Associate Professor in the De- partment of Electrical and Computer Engineenng. He is also a member of the Ordre des Ingtnieurs du QuCbec. HIS m a n research interests are fault
tolerant architectures, WSI, testing, VLSI design methodologies, advanced packaging, testing, high speed electronics circuits, and practical applications of these technologies, including integrated measurement systems.
Dr. Savana has published a book on VLSI design and he has authored or co-authored more than 100 technical papers in these areas He has served on the program comnuttee of the IEEE workshop on defect and fault tolerance in VLSI, ISCAS ’92, FTCS21, and the Canadian conference on very large scale integration. In 1993, he served as program co-chairman of the IEEE workshop on defect and fault tolerance in VLSI and he was general co- chairman of the 1994 edition of that workshop He is a member of the Montreal “Groupe de Recherche en Inttgration et Architecture des Ordinateurs” and he chairs its university industry liaison comnuttee. He is also the dlrector of the nucroelectronics research group of &ole Polytechnique de Montrtal.
the design of specific Polytecnique de Montr
Philippe A. Pango was born in Abidjan, Ivory Coast, on June 14, 1967. He received the Diploma in Science and Technology from the University of Abidjan in 1991, in the area of electronics, control, and computer science.
Since 1992, he has been with the Signals and Measurements Laboratory, University of Quebec at Trois-Rivieres, where he is working toward the masters degree in the area of digital signal pro- cessing. His research interests are in the general area of digital signal processing with emphasis ion
VLSI architectures at the VLSI Laboratory, Ecole eal.
Roman 2. Morawski (M’93). for photograph and biography, see this issue, p. 703.