Embed Size (px)
Citation preview

Information Sciences 509 (2020) 376–399
Contents lists available at ScienceDirect
Information Sciences
journal homepage: www.elsevier.com/locate/ins
An angle dominance criterion for evolutionary many-objective
optimization
Yuan Liu
a , b , Ningbo Zhu
a , b , ∗, Kenli Li a , b , Miqing Li c , Jinhua Zheng
d , Keqin Li a , e
a College of Computer Science and Electronic Engineering, National Supercomputing Center in Changsha, Hunan University, China b College of Computer Science and Electronic Engineering, Hunan University, Hunan, China c CERCIA, School of Computer Science, University of Birmingham, Birmingham B15 2TT, U. K. d School of Information Engineering, Xiangtan University, Hunan, China e Department of Computer Science, State University of New York, New Paltz, NY 12561, USA
a r t i c l e i n f o
Article history:
Received 20 December 2017
Revised 19 November 2018
Accepted 29 December 2018
Available online 7 January 2019
Keywords:
Angle dominance criterion
Pareto dominance criterion
Many-objective optimization
Evolutionary algorithms
a b s t r a c t
It is known that Pareto dominance encounters difficulties in many-objective optimization.
This strict criterion could make most individuals of a population incomparable in a high-
dimensional space. A straightforward approach to tackle this issue is modify the Pareto
dominance criterion. This is typically done by relaxing the dominance region. However,
this modification is often associated with one or more parameters of determining the re-
laxation degree, and the performance of the corresponding algorithm could be sensitive
to such parameters. In this paper, we propose a new dominance criterion, angle domi-
nance, to deal with many-objective optimization problems. This angle dominance criterion
can provide sufficient selection pressure towards the Pareto front and be exempt from the
parameter tuning. In addition, an interesting property of the proposed dominance crite-
rion, in contrast to existing dominance criteria, lies in its capability to reflect an individ-
ual’s extensity in the population. The angle dominance is integrated into NSGA-II (instead
of Pareto dominance) and has demonstrated high competitiveness in many-objective opti-
mization in comparison with a range of peer algorithms.
© 2019 Elsevier Inc. All rights reserved.
1. Introduction
Many real-world optimization problems are composed of multiple conflicting objectives which need to be optimized
simultaneously. For a multi-objective optimization problem (MOP), an improvement of the performance on one objective
often leads to the deterioration on other objective(s). Therefore, Multi-objective optimization algorithms (MOEAs) can only
search for a set of trade-off solutions to approximate Pareto optimal solutions.
In three-decades, MOEAs have attracted great attention for being able to solve a class of real-world optimization prob-
lems that have multiple criteria or objectives [7,30,43] . However, traditional Pareto-based MOEAs can only effectively solve
two- or three-dimensional optimization problems. In real world, the number of considered objectives can be larger (i.e.,
over three), and these problems are known as many-objective optimization problems (MaOPs). When facing MaOPs, it’s
not easy for traditional Pareto-based MOEAs to converge into the Pareto front. The main reason is that the proportion of
∗ Corresponding author at: College of Computer Science and Electronic Engineering, Hunan University, Hunan, China.
E-mail addresses: [email protected] (Y. Liu), [email protected] (N. Zhu), [email protected] (K. Li), [email protected] (M. Li), [email protected]
(J. Zheng), [email protected] (K. Li).
https://doi.org/10.1016/j.ins.2018.12.078
0020-0255/© 2019 Elsevier Inc. All rights reserved.

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 377
non-dominated solution increases rapidly with the number of objectives. Consequently, the density based second selection
criterion in Pareto-based algorithms plays a leading role in the selection process of Pareto-based MOEAs [33] . However, the
studies in [24] indicate that a diversity-based selection criterion has a detrimental impact on the population’s convergence.
This criterion prefers the dominance resistant solutions (DRSs) which have “good” diversity over the objective space but are
far away from the desired Pareto front [33] . Therefore, balancing the convergence and diversity of the population for MaOPs
has become a challenging research topic in the field of many-objective optimization.
To solve the problems above, many methods have been proposed, and can be divided into the following categories:
Loosening Pareto-dominance approach. With the increase of the number of objectives, the Pareto-dominance relation-
ship is difficult to distinguish between solutions in terms of convergence [19] . By loosening the Pareto dominance relation
(i.e., increasing solutions’ dominance area). That the solutions approach the Pareto front more rapidly will be identified.
For example, the controlling dominance area (CDAS) approach [38] adjusts the dominance area of solutions by setting an
appropriate parameter. The grid dominance [44] adds the selection pressure by adopting an adaptive grid construction. The
ε -dominance based MOEA ( ε -MOEA) [9] can obtain good convergence and uniformity performance by dividing the objective
space into hyper-boxes, each of which is assigned at most one solution.
Decomposition-based approach. Using a set of uniformly distributed weight vectors, these approaches decompose a MOP
into a number of single-objective sub-problems and then uses a search heuristic to optimise these sub-problems simul-
taneously and cooperatively. In contrast to the Pareto dominance criterion, decomposition-based approaches can rank the
entire population and form a total order among the solutions and thus providing sufficient selection pressure in a high-
dimensional objective space. Recently, some decomposition-based MOEAs, such as the MOEA with decomposition (MOEA/D)
[45] , multiple single-objective Pareto sampling (MSOPS) [22] and MOEA/D based on localized weighted sum (MOEA/D-LWS)
[40] , have been found to work well on MaOPs.
Ranking-based approach. Ranking-based algorithms can distinguish between solutions by defining a new sorting method.
Similar to decomposition-based approaches, ranking-based approaches can form a total order among the solutions. In [13] ,
the relation favour is to rank the solutions by comparing the numbers of their superior objectives. Therefore, the relation
favour will prefer those solutions if most of their objectives are superior to that of others. Additionally, the average ranking
(AR) [5] is another ranking method. Firstly, on each objective, it ranks all the non-dominated solutions on the basis of their
objective values, and the number of ranking values of a solution equals to the number of the objectives of the problem.
Then, AR sorts the solutions by means of their average ranking values.
Density estimation based approach. Recently, some researches have shown that some modification of diversity mainte-
nance in Pareto-based algorithms can also promote the convergence of population, e.g., the diversity management operator
(DMO) [1] and shift-based density estimation (SDE) [33] . DMO uses one indicator (i.e., the maximum extensity indicator) to
evaluate the population’s convergence. This approach relies on the true Pareto front of the problem. However, in practical
applications, the Pareto front of most problems is unknown. SDE, as a diversity estimation, takes two aspects into account:
convergence and diversity. In contrast to DMO, SDE has a high usability, and does not need to know the Pareto front of the
problem. Experimental results show that it can significantly improve the performance of Pareto-based algorithms.
To evaluate the performances of the above MOEAs, the diagnostic assessment framework [17,37] is another research
hotspot in the evolutionary computation community. It contains three important elements. The first one is multiple perfor-
mance metrics. They mainly evaluate the effectiveness, reliability, efficiency, and controllability of an MOEA [37] . Effective-
ness checks whether an MOEA achieves high level of performance. Reliability captures performance changes in the paramet-
ric process and random seed testing. Efficiency refers to achieving high levels of performance in the minimum number of
function evaluations. Controllability measures the ease-of-use or sensitivity of MOEAs’ to their parameterizations. Then, an
adequate sample of problems is another element. A number of test problem have been developed to benchmark the perfor-
mance of MOEAs, such as Deb-Thiele-Laumanns-Zitzler (DTLZ) [11] , Walking Fish Group (WFG) [21] and multiline distance
minimization problem (ML-DMP) [32] . Among them, the most widely-used element are DTLZ and WFG. And the last one is
the ability to uncover pertinent parameter controls and dynamic search behavior within the algorithm.
Although the above studies clearly enhance the search ability of MOEAs and various methods were proposed to tackle
MaOPs, the area of evolution many-objective optimization is far from being mature. Furthermore, the loosening Pareto-
dominance approaches inevitably encounter difficulties in determining the degree of slack in the new dominance relation
for difference problems, leading to the emergence of dynamic tuning methods. For the decomposition-based approaches,
two critical issues need to be considered. One of which is that the specified weights’ distribution needs to be consistent
with a given problem’s Pareto front. The other is that the configuration of weight vectors suffers the curse of dimensions
in many-objective space. Due to the lack of a diversity maintenance strategy, the ranking-based approaches may lead the
evolutionary population to converge into a small part of the Pareto front. As mentioned above, the true Pareto front of the
problem affects the performance of the density estimation based approach. Although the SDE is off the hook, parts of the
solution near the boundary are easily eliminated by it.
In this paper, we focus on the first approach and wish to propose a dominance relationship (named as angle dominance)
that is insensitive to parameters. One interesting property of the angle dominance is its capability of reflecting the conver-
gence and extensity of solutions in the population. This is in contrast to existing dominance criteria, which typically only
involve convergence (e.g., Pareto dominance) or both convergence and uniformity (e.g., ε-dominance). The basic idea of the
angle dominance is simple. By substituting the objective vector of a solution with an angle vector, the angle dominance
enlarges the dominance area of the solution. This not only increases the selection pressure towards the Pareto front but

378 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
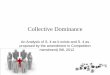
Fig. 1. Illustration of six dominance relationships among points in a two-dimensional objective space: (a) Pareto dominance, where the grey area is the
objective space where solutions are Pareto-dominated by p 1 ; (b) α-dominance, where the α-dominance area of p 1 is clearly larger than that in the Pareto
dominance; (c) ε-dominance, where p ∗1 is the shift point of p 1 by means of ε1 and ε2 ; (d) CDAS, where the shape of the grey area is quite similar to that
in ε-dominance. The angles ϕ1 and ϕ2 are used to control the dominance area; (e) Cone ε-dominance, where the grey area is cone ε-dominated by p 1 ,
and the shape of the dominance area is a cone; (f) Grid-dominance, where the grid is divided by the current population { p 1 , p 2 }. The shape of the grey
area is similar to that in ε-dominance.
also is able to maintain boundary solutions very well. In addition, the angle dominance can be easily applied to any Pareto
dominance based algorithms.
The rest of this paper is organized as follows. Section 2 briefly reviews the work related to dominance relationships and
angle-based environmental selection. Section 3 is devoted to description of the proposed angle dominance criterion and
introduces the framework of the angle dominance based NSGA-II which is denoted as NSAG-II + AD. Section 4 presents the
algorithm settings, test functions, and performance metrics used for performance comparison. The experimental results and
relevant analyses are presented in Section 5 . Finally, Section concludes the paper and gives our study priorities in the future
work.
2. Related works
2.1. Related dominance criteria
It has been demonstrated that traditional Pareto dominance generally fail to solve MaOPs. Therefore, in past decades, a
number of loosening dominance criteria have been proposed, such as α-Dominance [23] , ε-Dominance [9] , CDAS [38] , Cone
ε-Dominance [4] and Grid-Dominance [44] , etc. In this section, we will analyze the methods mentioned above in detail. For
simplicity, we assume that the optimization problems mentioned are minimization ones throughout the paper.
A. Pareto dominance
In 1896, Pareto proposed the concept of Pareto dominance, as shown in Fig. 1 (a). Suppose that there are two solutions p
and q, p dominates q (denoted as p ≺q ) if the following conditions hold: {f i ( p ) ≤ f i ( q ) , ∀ i ∈ { 1 , 2 , · · · , m } f j ( p ) < f j ( q ) , ∃ j ∈ { 1 , 2 , · · · , m } , (1)
where m is the number of objectives. In other words, all objectives in p are not greater than the corresponding objectives
of q , and at least one objective of p is less than that of q .
The Pareto dominance relationship can divide the original population into multiple sub-populations, then the sub-
populations with high priorities will be preserved in the environmental selection. However, Pareto dominance is generally
effective to handle two- and three-objective MOPs. When a MOP has more than three objectives, Pareto dominance will lose

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 379
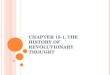
Fig. 2. Percentage of the number of non-dominated solutions over that of objectives in a set of randomly generated 200 solutions. Where the abscissa
represents the objective dimension and the ordinate represents the average percentage over 30 runs.
its effectiveness in most cases. This is because with the increase of the dimensionality, the proportion of non-dominance
individuals will grow exponentially. As can be seen in Fig. 2 , when the number of objectives reaches 20, all the solutions are
non-dominated and belong to the same sub-population. That is to say, Pareto dominance can not maintain the population’s
diversity. To solve that, the distribution mechanisms, such as the crowding distance [10] and archive truncation procedure
[49] , need be applied in the environmental selection.
B. α-dominance
In multi-objective optimization, the solutions, which are far from the Pareto front but are hardly dominated, are defined
as dominance resistant solutions (DRSs) [23] . These solutions may have a detrimental effect on the convergence of the
population. In order to solve this issue, Ikeda et al. [23] proposed a relaxed form of the dominance relation, called α-
dominance, as shown in Fig. 1 (b).
In α-dominance, the upper αi, j and lower 1 αi, j
bounds of trade-off rates between two objectives f i and f j are pre-defined,
and the trade-off rates between two objectives f i and f j of any two solutions are strictly controlled within the pre-defined
bounds. Before judging the dominance relations between two individuals, the following definition is considered:
g i (p, q ) := f i ( p ) − f i ( q ) +
K ∑
j � = i αi j
(f j ( p ) − f j ( q )
), p, q ∈ P , (2)
where p and q are two solutions in population P . The p dominates the q ( p ≺αq ) if and only if the following conditions hold:{g i (p, q ) ≤ 0 , ∀ i ∈ { 1 , 2 , · · · , m } g j (p, q ) < 0 , ∃ j ∈ { 1 , 2 , · · · , m } , (3)
where m is the number of objectives.
In Fig. 1 (b), two Pareto non-dominated solutions p 1 and p 2 are regarded as p 1 α-dominating p 2 . According to the defini-
tion of α-dominance criterion, when α is larger, the population can converge more easily to the Pareto front, but it is more
prone to be trapped in a local optimum. On the contrary, when α is smaller, a wider Pareto front will be found, but more
solutions far from the Pareto front will be preserved. Therefore, it is hard to find a well-distributed and well-converged
trade-off solution set for α-dominance.
C. (1-k)-based dominance
The (1-k)-based criterion [14] has been considered when addressing MaOPs. By comparing a solution to another and
counting the number of objectives where it is better than, the same as, or worse than the other, this criterion uses these
numbers to distinguish the relations of domination between individuals. Suppose that there are two solutions p and q , and
n b , n e , n w
respectively represent the number of objectives where p is better than, equal to, or worse than q. p is said to
k -dominate q if and only if:
n e < m ∧ n b ≥m − n e
k + 1
, (4)

380 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
where 0 ≤ k ≤ 1, and m is the number of objectives.
Obviously, if k = 0 , the (1 − k ) -dominance will be consistent with the traditional Pareto-dominance, and if k is larger, the
(1 − k ) -dominance is looser. In addition, there are some extensions on (1 − k ) -dominance. For example, fuzzy numbers can
be applied to compare the dominance relation between solutions. In fuzzy dominance, n b , n e , n w
are defined as follows: ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
n
F b (p, q ) =
M ∑
i =1
u
(i ) b
( f i (p i ) − f i (q 2 ))
n
F e (p, q ) =
M ∑
i =1
u
(i ) e ( f i (p i ) − f i (q 2 ))
n
F w
(p, q ) =
M ∑
i =1
u
(i ) w
( f i (p i ) − f i (q 2 ))
n
F b
+ n
F w
+ n
F e =
M ∑
i =1
(u
(i ) b
+ u
(i ) e + u
(i ) w
) = m
. (5)
In terms of the above expressions, the (1 − k F ) -dominance considers the convergence of the population according to the
above three situations. As a matter of fact, the (1 − k F ) -dominance can be seen as a dimensionality reduction strategy, so it
is unavoidable to lose some target information.
D. ε-dominance
Deb et al. proposed a steady-state MOEA, named as ε-MOEA. The ε-dominance is illustrated in Fig. 1 (c). In the figure,
within each box, only one non-Pareto dominated solution is preserved, with the following condition:
(1 − ε) · f i (p) ≤ f i (q ) , ∀ i ∈ { 1 , 2 , · · · , m } , (6)
where p and q are two non-Pareto dominance solutions and m is the number of objectives.
The ε-dominance criterion could maintain the uniformity of population. However, the extreme solutions are also easily
ε-dominated by other solutions, which can affect the extensity of the population. In addition, different problems generally
require distinct ε values.
E. Controlling Dominance Area of Solution (CDAS)
In 2007, Sato et al. proposed a new dominance, CDAS, which is defined as follows:
f ′ i ( x ) =
r · sin ( ω i + S i · π)
sin ( S i · π) , (7)
where r is the norm of f ( x ) and ω i is the declination angle between f ( x ) and the coordinate axis. Fig. 1 (d) shows the meaning
of CDAS.
From Eq. (7) , the dominance area of solution x can be controlled by the parameter S i . It is obvious that if S i = 0 . 5 , then
f ′ i (x ) = f i (x ) which corresponds to the classical definition of Pareto dominance; if S i < 0.5, then f ′
i (x ) > f i (x ) ; and if S i > 0.5,
then f ′ i (x ) < f i (x ) . Such objective modification changes the dominance area of solutions. Therefore, a suitable parameter S i
can effectively promote the convergence of the population. However, as the same as ε-dominance, the parameter of CDAS is
also not easily determinable when facing different problems.
F. Volume dominance
The volume dominance criterion was proposed by Khoi Le et al.. It uses the strength of solutions to analyze the domi-
nance relations between solutions. For two solutions p and q , the dominated volume of each solution ( V ( p ) and V ( q )) needs
to be calculated as follows:
V (p) =
m ∏
i =1
( f i (p) − r i ) , (8)
where r is a reference point. And the shared dominated volume of p and q is defined as:
SV (p, q ) =
m ∏
i =1
( min ( f i (p) , f i (q )) − r i ) . (9)
It is said that p volume-dominates q ( p ≺V q ) if either: {
V (q ) = SV (q, p) and V (p) < SV (p, q ) or
V (p) < V (q ) < SV (p, q ) and V (p) − V (q )
SV ( p, q ) < rSV
. (10)
As described by Eq. (10) , when V ( p ) is smaller, the solution p is closer to the Pareto front, and vice versa. Therefore,
the volume-dominance criterion can make the population quickly converge to the Pareto front. But the disadvantage of
volume-dominance is that its performance relies heavily on the shape of the Pareto front.
G. Cone ε-Dominance
When dealing with MOPs, it has been found that ε-dominance may eliminate several viable solutions (See Appendix A for
explanation), which affects the convergence and extensity of population. Batista et al. proposed the cone ε-dominance. In
Fig. 1 (e), p ε-dominates p and both of them are non-cone ε -dominated. Cone ε -dominance introduces a parameter k
1 2
Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 381
Table 1
The properties of nine domination relations.
Dominance criterion Convergence Uniformity Extensity Irreflexive Asymmetric Transitive Strict partial order
Pareto-dominance √ √ √ √ √
α-dominance √ √ √ √ √
(1 − k ) -dominance √ √ √
ε-dominance √ √ √
CDAS √ √ √ √ √
Volume-dominance √ √ √ √ √
Cone ε-dominance √ √ √
Grid-dominance √ √ √ √ √ √
Angle dominance √ √ √ √ √ √
“√
” in the cell indicates that the domination relation has a corresponding property.
( k ∈ [0, 1)), and k is applied to control the shape of dominance area of a solution. When k → 0, the cone ε-dominance
is consistent with the traditional Pareto-dominance. When k > 0, the shape of the dominance area is a cone. As for two
solutions p and q, p cone ε-dominates q (denoted as p ≺cone εq ) if the following condition holds:
( p ≺ q ) ∨ ( �λ = z| λi ≥ 0 , ∀ i ∈ { 1 , · · · , m } ) , (11)
where � is the cone ε-dominance matrix, z = q − [ p − ε] , and εi > 0.
According to the above description, the cone ε-dominance could improve both convergence and uniformity of popula-
tion (See Appendix B for explanation). However, to improve the performance of an algorithm, except for the parameter ε,
the cone ε-dominance has to add another parameter k into the algorithm. This parameter, together with ε, can limit the
application of the algorithm.
H. Grid dominance
Yang et al. modified the traditional ε-dominance and proposed a grid dominance criterion in the grid-based evolutionary
algorithm (GrEA), as shown in Fig. 1 (f). Inspired by the ideas in [27] , GrEA adaptively constructs grids. Comparing with
traditional grid-based approaches, GrEA adopts individually centered calculations of the grid by depicting the locations of
solutions. This could determine the mutual relationship of solutions in a grid environment so as to increase the diversity.
Nevertheless, the individually centered calculation of the grid suffers from potential deterioration of convergence since the
adjacent well-converged solutions are eliminated.
Table 1 summaries the properties of all the dominance criteria. In this table, the diversity of solution set is subdivided
into the uniformity and extensity of the solution set. In general, uniformity quantifies the distance between neighboring
points in the solution set, and extensity refers to the range of the solution set. It worth mentioning that a uniformly-
distributed solution set does not necessarily mean that the solution set spread very well. As a complement to uniformity,
extensity considers the spread of the solution set. This table shows that all the existing dominance criteria focus on the
convergence of population, a few of which involve the uniformity of population, and no one of them involve the extensity
of population. In this paper, we propose an angle dominance criterion that takes both the convergence and extensity into
account. In this strategy, the angle vector is applied to replace the objective vector of a solution to reflect its position in
the objective space. This will lead to two characteristics of the proposed criterion. The first one is that, it retains the basic
information (like its objective position) of a solution. For each solution, the position of the angle vector corresponds to the
position of the objective vector. And the other one is that, the angle dominance strategy flexibly enlarges the dominance
area of a solution. Consequently, it can increase the selection pressure in terms of convergence so as to make the population
move towards the Pareto front. As for the extensity, the angle dominance uses the angle vectors to determine the mutual
relationships between solutions. When a solution is closer to the Pareto front, its angle becomes smaller, which makes it a
higher fitness. In addition, angle dominance and Pareto dominance share some common properties, such as the irreflexive
relation, asymmetric relation, transitive relation and strict partial order.
2.2. The angle-based environmental selection
In recent years, the angle-based environmental selection is widely considered in EMO. For instance, in [48] , MOEA/D-
ADCP uses angle to determine the dominance relationship between two solutions. If the angle of the two solutions is greater
than a given threshold, they are considered to be non-dominated by each other. In the decomposition-based approaches [26] ,
the angle of solution and weight is used to judge their similarity in the search directions. In other words, the larger their an-
gle, the smaller their similarity. The angle-based selection is also used to improve the diversity of Pareto-based approaches.
In [42] , VaEA first uses the maximum-vector-angle-first principle to guarantee the extensity and uniformity of the solutions,
and then ensure the convergence of the solutions through the worse-elimination principle. In addition, in MOEA/VAN, the
angle-based selection is exploited during mating and environmental selection by determining the neighborhood and the
most crowded region in the objective space, respectively [12] .
Although this paper also uses the angle-based selection criterion to select excellent individuals, this criterion is signifi-
cantly different from the above methods. Firstly, the angle of this paper is composed of the solution and each axis node, and

382 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Fig. 3. The angle dominance in a two-objective scenario. p is a solution, z nad is the worst point, and the shaded region is the dominance area of p. α1 and
α2 are the components of the angle vector of p. z ′ is constructed by k · z nad , where k is a preset parameter.
most of the angle-based selection criteria are to calculate the angle between each pair of solutions. Secondly, the purpose
of our angle-based selection is to increase the convergence pressure of the solutions, while most of the other criteria based
on angle selection are to improve the diversity of the solutions.
3. Proposed angle dominance criterion
In this section, we first introduce the concept of angle dominance and analyze its properties, and then integrate the
angle dominance criterion into NSGA-II.
3.1. Concept of angle dominance
In order to interpret the concept of the proposed angle dominance criterion, Fig. 3 presents two-objective scenario of the
criterion. Solution p is assigned an identification angle vector angle p = (α1 , α2 ) , and the shaded region is the dominance
area of p . More specifically, in Fig. 3 , z nad is the worst point of the current population, defined as z nad = (z nad 1
, z nad 2
) , where
z nad i
=
n max
j=1 f i (x j ) ( n is the size of the population). The point z ′ is constructed by means of a preset parameter k and the
worse point z nad , and it is defined as z ′ = (k · z nad 1
, k · z nad 2
) , where k is designed to control the dominance area of a solution.
The smaller k is, the larger the dominance area of the solution is. For instance, if k is less than 1 and very close to 0, it
means the z ′ is near to the origin of coordinate and dominates all the solutions. It will result in the solutions dominate each
other. Inversely, with the k increasing, the dominance area of the solutions is gradually decrease. The detailed analysis is in
Subsection 5.1 . After that, P i = (a 1 , a 2 , · · · , a m
) is determined as the components of the point z ′ , where a i is set to k · z nad i
while other elements are set to 0. Finally, the angle vector angle p = (α1 , α2 ) can be computed by Definition. 1 .
Definition 1. By calculating the i th node point P i = (0 , · · · , kz nad i
, 0) , αi in the angle vector angle p = ( α1 , α2 , · · · , αm
) is de-
fined as follows:
αi = arccos
−→
P i o ·−→
P i p
| −→
P i o | · | −→
P i p | , (12)
where point o is the origin of coordinate or the ideal point of the current population that defined as z ideal =
(z ideal
1 , z ideal
2
)where
z ideal i =
n
min
j=1 f i (p j ) . (13)
Definition 2. Assuming two solutions x and y, x is said to angle dominate y (denoted as x ≺angle y ) if the following condition
holds:
∀ i ∈ { 1 , 2 , · · · M} : αx i ≤ αy
i ∧ ∃ i ∈ { 1 , 2 , · · · , m } : αx
i < αy i . (14)
The properties of the angle dominance criterion will be introduced, and the premise of these properties is that the
parameter k has to be greater than 1. Suppose there are three different solutions p 1 , p 2 and p 3 . Their angle vectors are
respectively denoted as follows: angle p = (α1 , α2 , · · · , αm
) , angle p = (β1 , β2 , · · · , βm
) , and angle p = (θ1 , θ2 , · · · , θm
) .
1 2 3
Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 383
Fig. 4. Properties of the angle dominance (a) An illustration of the ability of angle dominance to promote the convergence. There are four solutions
p 1 = ( 2 , 2 ) , p 2 = ( 3 , 1 . 7 ) , p ′ 1 = ( 4 , 4 ) and p ′ 2 = ( 5 , 3 . 7 ) . It is easy to know that −−−→
p 1 p ′ 1 =
−−−→
p 2 p ′ 2 ; (b) An illustration of the ability of angle dominance to promote
extensity. There are three solutions p 1 = ( 1 . 5 , 1 . 5 ) , p 2 = ( 2 . 5 , 2 ) , p 3 = ( 0 . 5 , 3 ) .
Property 1. The angle dominance is an irreflexive relation on the population.
Proof. For any solution p 1 , assuming its angle vector is angle p 1 = (α1 , α2 , · · · , αm
) , then ∀ i ∈ { 1 , 2 , · · · , m } , αi = αi . Thus, the
conditions for p 1 ≺angle p 1 in Definition. 2 do not hold. Hence, the angle dominance relation is irreflexive. �
Property 2. The angle dominance is an asymmetric relation on the population.
Proof. If p 1 ≺angle p 2 , then p 2 does not dominate p 1 . From Definition. 2 , p 1 ≺angle p 2 ↔ αi ≤β i , ∀ i ∈ {1, 2, ���, m } and
αk < βk , ∃ k ∈ {1, 2, ���, m }. Hence, if p 1 ≺angle p 2 , then p 2 does not dominate p 1 . Therefore, the angle dominance is
asymmetric. �
Property 3. The angle dominance is a transitive relation on the population.
Proof. If p 1 ≺angle p 2 and p 2 ≺angle p 3 , from Definition. 2 , αi ≤β i , β i ≤ θ i , ∀ i ∈ {1, 2, ���, m } and αk < βk , β l < θ l , ∃ k, l ∈ {1, 2, ���,
m }, so p 1 ≺angle p 3 . That is, the angle dominance is transitive. �
Property 4. The angle dominance defines a strict partial order on the population.
Proof. Since the angle dominance is an irreflexive, asymmetric and transitive relation on the population, it defines a strict
partial order on the population. �
It is well-known that the traditional Pareto dominance criterion can not easily handle MaOPs, and the most effective way
is to increase the dominance area of solutions. In terms of Definition. 2 , by amplifying the solutions’ dominance area, the
solutions that are far away from the Pareto front which are hardly eliminated by the Pareto dominance will be eliminated
by the angle dominance. Therefore, angle dominance could effectively improve the convergence of population. Moreover, as
with most dominance criteria, the angle dominance is Pareto compliant.
More specifically, in the angle dominance criterion, the solution closer to the Pareto front have higher priority and are
first selected, and the solution far away from the Pareto front have larger dominance area. For example, in Fig. 4 (a), it can
be seen that p 1 and p 2 are non-Pareto dominated, and p ′ 1
and p ′ 2
are also non-Pareto dominated, while p 1 and p 2 Pareto
dominate both p ′ 1 and p ′ 2 . However, in the sense of angle dominance, p 1 and p 2 angle dominate both p ′ 1 and p ′ 2 , which
verifies that the solutions having good convergence own higher priority for selection. Moreover, p 1 non-angle dominates p 2 ,
but p ′ 1
angle dominates p ′ 2 , which denotes that the solution far away from the Pareto front have larger dominance area, and
vice versa. Consequently, in the fast sorting selection method [10] , that of the non-angle dominated solutions in the layers
will be decreased, which corresponds to the evolution of the population.
This work also investigated the number of solutions in each layer during the fast sorting selection between the angle
dominance and Pareto dominance. Fig. 5 presents the experimental results on the DTLZ3 instances [11] with 2, 3, 5, 10,
and 15 objectives. In Fig. 5 (a) and (b), most solutions are crowded in the first layers. Specifically, from Fig. 5 (a), with the
increase of the number of objectives, the number of non-angle dominated solutions in each layer stays stable. But most
non-Pareto dominated solutions are crowded in the first layer, as shown in Fig. 5 (b). This phenomenon implies that the
angle dominance can differentiate the solutions whereas Pareto dominance can not. The main reason is that the dominance
area of the solution in the angle space is greater than it is in the objective space. It will result in the angle dominance
criterion having greater selection pressure than the Pareto dominance in the process of non-dominating sorting.

384 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Fig. 5. The average number of solutions in all the nondominated layers under (a) the angle nondominated sorting and (b) the Pareto nondominated sorting,
where the population size is 100, the number of runs is 30, and the test instance is DTLZ3.
Finally, except for the solutions close to the Pareto front, angle dominance also prefers the solutions close to the bound-
aries, which can promote the population’s extensity. For example, there are three solutions located in different objective
regions in Fig. 4 (b), p 1 and p 3 are non-angle dominated but both of them dominate p 2 . Notably, p 1 and p 3 are close to the
Pareto front and the boundary respectively. Thus, the solutions close to the Pareto front and boundaries have high priority
in the environmental selection.
3.2. Integrating angle dominance into NSGA-II
In this section, we take NSGA-II as an example to illustrate how to integrate the angle dominance criterion int its frame-
work. This integration can also be applied to other Pareto dominance based MOEAs, e.g., SPEA2 [49] .
The angle dominance based NSGA-II is denoted as NSGA-II + AD, whose framework is presented in Algorithm 1 . Firstly, in
Algorithm 1 NSGA-II + AD Framework.
Input: Number of objectives m , population size n , terminate condition T Output: The new population: P ;
1: P = Ø, i = 1 ;
2: P = RandomInitiate (P ) ;
3: while ¬T do
4: Q = Mat ingSelect ion (P ) ;
5: Q = Variation (Q ) ;
6: R = P ∪ Q ;
7: C omput eAngle (R ) ;
8: (F 1 , F 2 , · · · , F l ) = NonDominatedSort(R ) ;
9: while | P | + | F j |≤ n do
10: C omput eC rowdingDistance (F i ) ;
11: P = P + F j and i = i + 1 ;
12: end while
13: The last front to be included: F l = F i ;
14: if | P | = n then
15: return P ;
16: else
17: C omput eC rowdingDistance (F l ) ;
18: Calculate the number of points to be chosen from F l : k = n − | P | ; 19: Choose k members one at a time from F l to construct P ;
20: end if
21: end while
line 2, the NSGA-II + AD randomly generates an initial population P with | P | = n . For each iteration, the NSGA-II + AD applies
some genetic operators, like mating selection [29] , crossover [2] and mutation [6] , as shown in lines 4–5, to generate the
offspring population Q . Then, NSGA-II + AD mixes P and Q into an interim population R = Q ∪ P , where | R | = 2 n . Finally, it
uses the environmental selection from lines 7–20 to sort the mixed population and select the elite solutions into the next
generation.
In the environmental selection, firstly, we need to compute the angle vector for each solution according to Def. 1. Here,
the nadir point of R is determined by identifying the maximum value ( z nad i
) of each objective, so the nadir point is z nad =

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 385
(z nad
1 , z nad
2 , · · · , z nad
m
), where z nad
i =
n max
j f (x i ) . Finally, from lines 8–20 in Algorithm 1 , the elite solutions are selected into the
next generation P .
To achieve P , first, the angle dominance criterion is used to sort the population R into different non-domination layers
( F 1 , F 2 , ���, F l ). Here, we assume that the last layer is F l . Then, each non-domination layer is selected one at a time to
construct a new population P and the crowding distance of each individual in F i is computed, starting from F 1 and until
the size of P is equal to n or is greater than n for the first time. In most situations, the last layer is only partially accepted.
So, we should introduce a kind of distribution mechanism for selection of the last layer F l . In lines 17–19, as in NSGA-II, we
also apply the crowded-comparison approach, which computes the crowding distance for every last layer member as the
summation of objective-wise normalized distance between two neighboring solutions. Thereafter, the solutions with larger
crowding distance values are chosen. When the termination condition is reached, the algorithm stops.
4. Experiment design
This section is dedicated to the experimental design for investigating the performance of NSGA-II + AD. We first give the
two well-defined test problem suites and performance metrics used in the experiment. Then, we briefly introduce eight
MOEAs: NSGA-II [10] , GrEA [44] , MOEA/D [45] , ε-MOEA [9] , CDAS [38] , PICEAg [39] , MaOEARD [18] , VaEA [42] and KnEA
[47] which are used to validate the proposed criterion. Finally, the general experimental setting is provided for the compar-
ative studies of these algorithms.
4.1. Test problems and performance metrics
As a basis for the comparisons, two well-known test suites for many-objective optimization, DTLZ [11] and WFG [21] ,
are selected in the experiments. All these problems can be scaled to any number of objectives and decision variables. For
each problem, the number of objectives is set to 5, 8, 10, 15 and 20, respectively. As recommended in [21] , the number of
decision variables is set to s = m + K − 1 , where m is the objective number, K = 5 for DTLZ1, K = 10 for DTLZ2 to DTLZ6
and K = 20 for DTLZ7. According to [21] , the number of decision variables is set to s = K + L for WFG test suite, where the
position-related variable K = 2 · (m − 1) , and the distance-related variable L = 20 . The two test suites have been used to
challenge different abilities of algorithms, and the properties of the tests problems are shown in Table 2 .
In order to compare the performance of the selected algorithms, two widely-used quality metrics, inverted generational
distance (IGD) [50] and hypervolume (HV) [41] , are introduced.
The former is a metrics to measure the distance of a solution set from the Pareto front, and is used to analyze the
influence of different values k on the performance of NSGA-II + AD. However, it is almost always the case that the true
Pareto front is unknown in real-world applications. In this case, a common practice is to specify a set of reference point
based on the Pareto dominance as an approximation of the Pareto front, and then calculate the average distance from each
reference point to the nearest solution in the solution set. Mathematically, let P ∗ be a reference set representing the Pareto
front, and P be an obtained solution set. Then, the IGD value of the obtained solution set P is defined as follows:
IGD ( P ) =
∑
x ∗∈ P ∗ d(x ∗, P )
| P ∗| , (15)
where | P ∗| denotes the size of P ∗ (the number of points in P ∗) and d ( x ∗, P ) is the minimum Euclidean distance from x ∗ to
P ( d ( x ∗, P ) = min x ∈ P ‖ f (x ∗) − f (x ) ‖ ). A low IGD value is preferable, which indicates that the obtained solution set is close to
the Pareto front and that it has good diversity.
The last one is used to evaluate the performance of algorithms on DTLZ and WFG, which measures the volume of the
objective space enclosed by a Pareto front approximation and a reference point in the objective space. The Pareto front
approximation with larger HV values is better. Then, the HV metrics can be described as the Lebesgue measure � of the
union hypercubes h i defined by a solution p i in the approximation and the reference point x ref as follows:
HV = �
(
{ ⋃
i
h i | p i ∈ P } )
= �
( ⋃
p i ∈ P { x | p i ≺ x ≺ x re f }
)
. (16)
Following the recommendation in [25] , that reference point x ref is slightly larger than z nad i
is suitable since the balance
between convergence and diversity of the solution set is well emphasized. In our experiments, We first normalize the ob-
jective value of obtained solution according to the range of the problem’s PF, then set the reference point to 1.1 times of
the z nad i
. Otherwise, considering that the exact calculation of the HV measure is computationally highly demanding, and
current algorithms are exponential in the number of objectives. we suggest a methodology based on Monte Carlo sampling 1
to estimate the HV result of a solution set [3] , where the number of sampling points is set to 1,0 0 0,0 0 0.
1 The main idea is that not the actual indicator values are important, but rather the rankings of solutions induced by the hypervolume indicator. To this
end, samples of objective vectors are randomly drawn and the proportion of objective vectors that are solely dominated by a specific individual represents
an estimate for the hypervolume contribution of this individual.

38
6
Y. Liu
, N
. Z
hu a
nd K
. Li
et a
l. / In
form
atio
n Scien
ces 5
09 (2
02
0) 3
76
–3
99
Table 2
Properties of test problems and parameter setting in GrEA and ε-MOEA. The setting of div and ε corresponds to the different numbers of objectives of a problem. m denotes
the number of tested objectives.
Problem m Properties div in GrEA ε in ε-MOEA S in CDAS
DTLZ1 5,8,10,15,20 Linear, Multimodal 10,10,11,11,11 0.059,0.055,0.056,0.342,0.485 0.49,0.42,0.39,0.39,0.38
DTLZ2 5,8,10,15,20 Concave 10,10,11,11,11 0.192,0.290,0.308,0.320,0.320 0.49,0.40,0.38,0.32,0.30
DTLZ3 5,8,10,15,20 Concave, Multimodal 10,10,11,11,11 0.200,0.157,0.850,0.850,0.850 0.45,0.37,0.39,0.37,0.34
DTLZ4 5,8,10,15,20 Concave, Biased 10,10,11,11,11 0.193,0.290,0.308,0.380,0.382 0.49,0.45,0.45,0.45,0.45
DTLZ5 5,8,10,15,20 Concave, Degenerate 29,11,11,11,11 0.079,0.127,0.129,0.132,0.132 0.42,0.41,0.41,0.39,0.39
DTLZ6 5,8,10,15,20 Concave, Degenerate, Biased 24,50,50,50,50 0.355,1.150,1.450,1.800,1.800 0.42,0.40,0.39,0.38,0.38
DTLZ7 5,8,10,15,20 Mixed, Disconnected, Biased 9,8,5,4,4 0.158,0.225,0.560,0.565,0.569 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8
WFG1 5,8,10,15,20 Mixed, Biased, Scaled 10,10,11,11,11 0.210, 0.322, 0.330, 0.353, 0.355 0.4 9,0.4 9,0.4 9,0.4 9,0.4 9
WFG2 5,8,10,15,20 Convex, Disconnected, Multimodal, Scaled 10,10,11,11,11 0.253,0.423,0.426,0.492,0.611 0.4 9,0.4 9,0.4 9,0.4 9,0.4 9
WFG3 5,8,10,15,20 Degenerate, Non-separable, Scaled 35,29,11,11,11 0.420,0.762,0.900,1.502,2 0.49,0.45,0.45,0.45,0.45
WFG4 5,8,10,15,20 Concave, Multimodal, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.49,0.47,0.47,0.47,0.47
WFG5 5,8,10,15,20 Concave, Deceptive, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8
WFG6 5,8,10,15,20 Concave, Non-separable, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8
WFG7 5,8,10,15,20 Concave, Biased, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8
WFG8 5,8,10,15,20 Concave, Biased, Non-separable, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8
WFG9 5,8,10,15,20 Concave, Biased, Multimodal, Deceptive, Non-separable, Scaled 10,10,11,11,11 0.600,1.349,2.082,4.793,6.746 0.4 9,0.4 8,0.4 8,0.4 8,0.4 8

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 387
Table 3
Terminate condition (the number of evaluations allowed).
Problem DTLZ(1,3,6) DTLZ(2,4,5,7) WFG1-WFG9
Evaluations 10 0,0 0 0 30,0 0 0 30,0 0 0
4.2. Nine other algorithms in comparison
To verify the performance of NSGA-II + AD, the following nine peer algorithms are considered:
NSGA-II [10] : It is the most well-known and frequently-used MOEA in the literature. In NSGA-II, the population is sorted
based on non-domination into each front. The first front being completely non-dominated set and the second front being
dominated by the individuals in the first front and the front goes so on. Moreover, the secondary ranking criterion for
solutions on the same front is called crowding distance. Large average crowding distance will result in better diversity in
the population. It is worth pointing that NSGA-II as a well-established algorithm in the area, its performance has been
outperformed by many other algorithms, as shown in [17] .
GrEA [44] : It adopts the adaptive construction of grids to strengthen the selection pressure toward the PF while main-
taining an extensive and uniform distribution among solutions. To this end, two concepts (i.e., grid dominance and grid
difference), three gird-based criteria (i.e., grid ranking, grid crowding distance, and coordinate point distance), and a fitness
adjustment strategy are incorporated into GrEA.
MOEA/D [45] : It is a representative decomposition-based algorithm using a decomposition method to decompose the
MOP into a number of scalar optimization problems. In this paper, considering that penalty-based boundary (PBI) [45] is
more effective than other decomposition methods for many-objective optimization in a recent study [46] , we select it as the
aggregation function for MOEA/D.
ε-MOEA [9] : It is a steady-state algorithm using the ε-dominance criterion. The objective space is divided into hyper-
boxes, whose size can be adjusted by the choice of ε. Each hyperbox is assigned at most a single point by the ε-dominance
and the distance from solutions to the utopia point in the hyperbox. ε-MOEA has been verified to perform well for many-
objective optimization problems in a recent study [36] .
CDAS [38] : It can control the degree of expansion or contraction of the dominance area of solutions using a user-defined
parameter S . Modifying the dominance area of solutions changes their dominance relation inducing a ranking of solutions
that is different to conventional dominance. In this paper, we integrated CDAS into NSGA-II for comparison experiments
with the proposed algorithms.
PICEAg [39] : It introduces a new concept of preference-based coevolutionary algorithm (PICEA), which coevolves a fam-
ily of decision-maker preferences together with a population of candidate solutions. In PICEAg, the preferences gain higher
fitness by being satisfied by fewer candidate solutions, and the candidate solutions gain fitness by meeting as many prefer-
ences as possible.
MaOEARD [18] : It includes two stages: 1) search for the target points around the true Pareto area and constrain the
objective search space and 2) a diversity improvement strategy is then applied to facilitate the extent and distribution of
the population while constantly updating target points to ensure convergence. In MaOEARD, the performance improvement
is gained directly by overcoming two fundamental challenges existing in MaOPs: 1) extremely large objective space and
2) ineffectiveness of Pareto-dominance.
VaEA [42] : It is a vector angle based evolutionary algorithm and uses two principles: the maximum-vector-angle-first
principle is used in the environmental selection to guarantee the extensity and the uniformity of solution set; the worse-
elimination principle replaces worse solutions in terms of the convergence.
KnEA [47] : It is knee point driven evolutionary algorithm, and the basic ideal of it is that knee points are naturally most
preferred among non-dominated solutions if no explicit user preferences are given. The preference of knee points can be
seen as a bias towards larger hypervolume which assists in achieving good convergence and diversity.
4.3. General experimental setting
In this section, the general parameter settings for all conducted experiments are given as follows:
1. Number of runs and termination criterion : All algorithms are run 30 times independently for each test instance. The num-
ber of termination criterion of an algorithm is a predefined number of evaluations. As shown in Table 3 , for the DTLZ1,
DTLZ3 and DTLZ6, it is set to 10 0,0 0 0, and for the other test problems (DTLZ2, DTLZ4, DTLZ5, DTLZ7 and WFG1-WFG9),
it is set to 30,0 0 0.
2. Parameters for crossover and mutation : A crossover probability p c = 1 and a mutation probability p m
=
1 n (where n denotes
the number of decision variables) are used. The distribution index is set as η = 20 for both the SBX and PM operators.
3. Population and archive size and parameter setting in selected algorithms : For all selected algorithms, the population size is
set to 100, and the archive is also maintained with the same size if required. In ε-MOEA, the size of the archive set is
determined by a parameter ε. To guarantee a fair comparison, this paper set ε as shown in Table 2 , and the archive size
is approximately the same as that of the other algorithms. GrEA requires a grid division parameter div , and the settings

388 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Table 4
The settings of the reference point of MOEA/D based on the normal-
boundary intersection (NBI) method and its two-layered version (NBI2).
Number-of-objectives ( m ) 5 8 10 15 20
Partitions ( p ) 5 3 2,2 2 2
Number-of-reference-point 126 120 55 + 55 = 100 120 210
Population-size 128 120 112 120 210
of div are shown in Table 2 . Meanwhile, Table 2 also gives the parameter S of CDAS. The number of goals is set to
m · 100 in PICEA-g [39] . For MOEA/D [45] , a preset of weight vectors are needed to maintain the diversity of population.
The normal-boundary intersection (NBI) method [35] and the two-layered version (NBI2) [8] are used in MOEA/D. In
consideration of the combinatorial nature of uniformly distributed weight vectors, the population size should be as close
as possible to the number of weight vectors. As shown in Table 4 , the number of objectives and the division parameter
of NBI are m and p , respectively.
5. Results and discussions
5.1. Parameter sensitivity analysis
In most of the improved dominance criteria, a series of parameters must be set. But, these parameters bring some diffi-
culties to the application of algorithms. For example, ε-dominance needs the user to set difference parameters for varying
MOPs with different dimensions, and so does the CDAS. In angle dominance criterion, there is a specific parameter k which
is the magnification factor of the nadir point. In this section, we investigate the effect of parameter k on the performance
of the angle dominance criterion.
In the experiments, angle dominance was combined with NSGA-II, which is denoted as NSGA-II + AD (presented in
Section 3 in detail). The algorithm was run for 30 times independently with varying values of k , where k ∈ [1, 100], on
the set of DTLZ instances, respectively. Fig. 6 presents the experimental results regarding the IGD values on 5-, 8- and
10-objective DTLZ1, DTLZ2 and DTLZ6 with linear Pareto front, spherical Pareto front and one-dimensional linear manifold,
respectively. The population size was set to 100, and the maximum number of generations was set to 10 0 0 on DTLZ1 and
DTLZ6 and 300 on DTLZ2, respectively.
From Fig. 6 , the trend of the change of IGD values is similar on varying problems. Note that in the figure the IGD values
are displayed in logarithm. The IGD values first decrease sharply, and then begin to level out and fluctuate in a very small
range. Specifically, on DTLZ1 problems with 5, 8 and 10 objectives, the IGD values are stable about 0.221, 0.400 and 0.470
respectively with the increase of the k from 2 to 100. This shows that when k is greater than 2, the performance of the
algorithm on the DTLZ1 test problem is relatively stable. When it comes to DTLZ2 in 5, 8 and 10 objectives, the IGD values
level out and fluctuate around 0.065, 0.025 and 0.47 respectively when k > 10 . In addition, the IGD values on DTLZ2 tend
to be more stable than that on DTLZ1. This shows that the sensitivity of parameter k on DTLZ2 is smaller than that of
parameter k on DTLZ1. Finally, when k > 10 , the IGD vales level out around 0.0 071, 0.0 077 and 0.0082 on DTLZ6 with 5, 8
and 10 objectives, respectively.
According to the above parametric analysis, it can be found that, when k > 10 , the performance of the algorithm is stable
and the change of parameter k has very little effect on the performance of the angle dominance. In fact, when k = 1 , an
individual has the largest angle dominated space. In this case, there may be a total order relationship between solutions. As
parameter k increases, the solution’s angle dominant space will gradually decrease, and the angle dominance progressively
approximates Pareto dominance. Thus the k cannot be set too small or too large. Given that when k is between [10, 100],
the performance of angle dominance on different problems is stable, we consider a value (50) near the media position of
[10, 100] as the magnification factor of the angle dominated space.
5.2. NSGA-II Vs. NSGA-II + AD
Table 5 shows the results of the two algorithms on the DTLZ test suite regarding the mean and standard deviation
(SD) values, where IGD was used for DTLZ problem. The better result regarding the mean for each problem is highlighted.
Moreover, in order to have statistically sound conclusions, Wilcoxon’s rank sum test [16] at a significance level of 0.05 was
conducted on the experimental results by two competing algorithms, where the symbols “ + ”, “ - ” and “ ≈ ” indicate
that the result by NSGA-II is significantly better, significantly worse and statistically similar to the obtained by NSGA-II + AD,
respectively.
As can be seen from Table 5 , the performance of NSGA-II has a clear improvement when the angle dominance is applied
to the algorithm, achieving a better value for all the 21 test instances. Also, for most of the problems on which NSGA-II + AD
outperforms NSGA-II, the results have statistical significance (20 out of the 21 problems). Fig. 7 shows the final solutions of

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 389
Fig. 6. Study of different settings of the k parameter. Where the abscissa represents the k parameter and the ordinate indicates the IGD value. The smaller
the IGD value, the better the performance.
Table 5
IGD results (mean and SD) of the NSGA-II and NSGA-II + AD on the DTLZ series of problems. The best mean of the algorithms for each
problem instance is shown with a gray background and the values in parentheses are the SDs.
.Problem evitcejbo-01evitcejbo-8evitcejbo-5
NSGA-II NSGA-II+AD NSGA-II NSGA-II+AD NSGA-II NSGA-II+ADDTLZ1 2.2573e-1 (2.75e-1) - 7.5862e-2 (1.78e-3) 6.8256e+0 (1.32e+1) -1.1755e-1 (1.56e-3) 9.8175e+0 (1.05e+1) - 1.2408e-1 (1.08e-3)DTLZ2 2.6194e-1 (3.60e-2) - 2.2136e-1 (4.08e-3) 1.9706e+0 (3.80e-1) - 4.0175e-1 (3.67e-3) 1.8670e+0 (4.14e-1) - 4.7152e-1 (4.13e-3)DTLZ3 9.8325e+0 (2.24e+1) -1.3318e+0 (3.49e+0) 7.6080e+2 (2.59e+2) -4.0164e-1 (5.35e-3) 1.0940e+3 (3.81e+2) - 4.7375e-1 (5.09e-3)DTLZ4 2.5532e-1 (1.32e-2) - 2.2062e-1 (3.19e-3) 1.7507e+0 (2.72e-1) - 3.9981e-1 (2.55e-3) 1.7775e+0 (3.34e-1) - 4.7425e-1 (5.44e-3)DTLZ5 1.0950e-1 (3.71e-2) - 7.0084e-3 (1.74e-4) 2.4631e-1 (9.11e-2) - 7.5029e-3 (6.14e-4) 4.1743e-1 (1.87e-1) - 8.0859e-3 (7.19e-4)DTLZ6 3.1606e+0 (9.20e-1) - 7.1727e-3 (4.83e-4) 6.0747e+0 (9.88e-1) - 7.7340e-3 (8.06e-4) 6.2883e+0 (7.80e-1) - 8.2108e-3 (1.07e-3)DTLZ7 4.9868e-1 (1.27e-1) ≈ 4.6150e-1 (9.97e-2) 2.5557e+0 (1.82e+0) -8.6303e-1 (1.62e-1) 5.8761e+0 (3.57e+0) -1.1052e+0 (2.17e-1)+/ − / ≈ 0/6/1 0/7/0 0/7/0
”+”, ” -” and ”≈” indicate that the result is significantly better, significantly worse and statistically similar to that obtained by NSGA-II+AD,respectively.

390 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Table 6
HV results (mean and SD) of the five algorithms on the DTLZ test suite. The best and the second mean among the algorithms for each
problem instance are highlighted in gray background and bold, respectively.
Problem M D NSGA-II+AD GrEA MOEA/D ε-MOEA CDAS
DTLZ1
5 9 4.5874e-2 (2.34e-4) 4.3054e-2 (5.20e-3) ≈ 4.8845e-2 (1.33e-5) + 4.0278e-2 (2.44e-3) − 4.4901e-2 (1.76e-4) −8 12 8.1246e-3 (1.90e-5) 5.0269e-3 (2.10e-3) − 8.1721e-3 (5.71e-5) + 6.7463e-3 (2.35e-4) − 8.0541e-3 (2.41e-5) −10 14 2.4945e-3 (5.31e-6) 9.8809e-4 (4.37e-4) − 2.5203e-3 (2.16e-6) + 6.8710e-4 (8.30e-4) − 2.4814e-3 (6.04e-6) −15 24 1.2705e-4 (7.42e-8) 7.7048e-6 (1.39e-5) − 1.1155e-4 (9.71e-7) − 1.0507e-5 (1.12e-5) − 1.2691e-4 (8.21e-8) −20 29 6.4082e-6 (3.72e-9) 1.0412e-6 (2.08e-6) − 5.3096e-6 (5.08e-8) − 2.2039e-8 (2.62e-8) − 6.3263e-6 (2.77e-8) −
DTLZ2
5 14 1.1529e+0 (1.14e-2) 1.2636e+0 (2.71e-3) + 1.2453e+0 (8.43e-4) + 8.0239e-1 (6.70e-2) − 1.1545e+0 (1.07e-2) ≈8 17 1.7675e+0 (1.64e-2) 1.9544e+0 (2.37e-3) + 1.8574e+0 (8.56e-3) + 1.1385e+0 (4.94e-2) − 1.7699e+0 (1.66e-2) ≈10 19 2.2489e+0 (2.09e-2) 2.4650e+0 (4.66e-3) + 2.3893e+0 (1.86e-2) + 1.1831e+0 (6.06e-2) − 2.2471e+0 (1.77e-2) ≈15 24 3.8630e+0 (3.09e-2) 3.9967e+0 (4.44e-2) + 7.7519e-1 (3.10e-1) − 1.4541e+0 (3.25e-1) − 3.9005e+0 (2.03e-2) +20 29 6.3982e+0 (4.21e-2) 6.3005e+0 (3.93e-2) − 4.0909e+0 (1.57e-1) − 2.4917e+0 (6.33e-1) − 6.3836e+0 (4.88e-2) ≈
DTLZ3
5 14 1.1393e+0 (1.61e-2) 4.6010e-1 (1.93e-1) − 1.2343e+0 (1.24e-2) + 9.9742e-1 (6.30e-2) − 1.1379e+0 (1.61e-2) ≈8 17 1.7496e+0 (3.05e-2) 1.6729e-1 (1.64e-1) − 1.1804e+0 (6.74e-1) ≈ 6.4395e-1 (1.12e+0) − 1.7500e+0 (3.04e-2) ≈10 19 2.2231e+0 (3.68e-2) 0.0000e+0 (0.00e+0) − 1.6018e+0 (1.02e+0) ≈ 0.0000e+0 (00e+0) − 2.2293e+0 (3.31e-2) ≈15 24 3.8375e+0 (6.73e-2) 0.0000e+0 (0.00e+0) − 3.7533e-1 (4.32e-3) − 0.0000e+0 (00e+0) − 3.8456e+0 (8.05e-2) ≈20 29 6.3332e+0 (1.34e-1) 0.0000e+0 (0.00e+0) − 2.9665e+0 (1.77e+0) − 0.0000e+0 (00e+0) − 6.3747e+0 (6.35e-2) ≈
DTLZ4
5 14 1.1774e+0 (9.44e-3) 1.2484e+0 (4.85e-2) + 7.8540e-1 (3.52e-1) − 8.2801e-1 (1.75e-1) − 1.1728e+0 (9.42e-3) −8 17 1.8037e+0 (1.28e-2) 1.9578e+0 (1.48e-3) + 1.5218e+0 (2.00e-1) − 1.5929e+0 (1.40e-1) − 1.7952e+0 (1.55e-2) −10 19 2.2857e+0 (1.91e-2) 2.4632e+0 (1.87e-2) + 1.5752e+0 (3.72e-1) − 2.2299e+0 (3.56e-2) − 2.2768e+0 (1.56e-2) −15 24 3.9393e+0 (2.37e-2) 4.0581e+0 (2.89e-3) + 1.7627e+0 (7.44e-1) − 3.5952e+0 (4.42e-2) − 3.9342e+0 (1.59e-2) ≈20 29 6.6009e+0 (1.03e-2) 6.4635e+0 (9.78e-2) ≈ 3.0669e+0 (1.15e+0) − 6.5034e+0 (8.81e-2) − 6.5939e+0 (1.14e-2) −
DTLZ5
5 14 9.1838e-3 (2.29e-5) 8.6099e-3 (1.83e-4) − 8.8915e-3 (1.98e-5) − 5.0025e-3 (1.58e-3) − 9.2124e-3 (2.31e-5) +8 17 1.9553e-5 (5.01e-8) 2.0733e-6 (2.51e-6) − 1.8214e-5 (2.31e-6) − 1.2127e-6 (1.58e-6) − 1.9610e-5 (5.72e-8) +10 19 6.1910e-8 (1.57e-10) 7.3977e-10 (1.92e-9) − 6.0942e-8 (1.83e-10) − 4.5008e-9 (6.94e-9) − 6.2169e-8 (1.93e-10) +15 24 8.7763e-17 (3.28e-19) 1.1816e-20 (3.54e-20) − 8.5604e-17 (3.79e-19) − 5.1899e-18 (8.98e-18) − 8.8195e-17 (2.87e-19) +20 29 2.2299e-29 (6.74e-32) 0.0000e+0 (0.00e+0) − 2.2018e-29 (5.15e-32) − 8.7874e-30 (4.54e-30) − 2.2397e-29 (7.58e-32) ≈
DTLZ6
5 14 9.1955e-3 (2.67e-5) 7.4988e-3 (4.50e-4) − 8.8448e-3 (4.35e-5) − 6.3572e-3 (2.03e-4) − 9.2175e-3 (2.96e-5) ≈8 17 1.9550e-5 (4.72e-8) 0.0000e+0 (0.00e+0) − 1.8264e-5 (1.96e-6) − 1.1121e-6 (1.93e-6) − 1.9593e-5 (6.81e-8) ≈10 19 6.2084e-8 (1.39e-10) 0.0000e+0 (0.00e+0) − 6.0896e-8 (1.16e-10) − 0.0000e+0 (0.00e+0) − 6.2115e-8 (1.64e-10) +15 24 8.7977e-17 (3.34e-19) 0.0000e+0 (0.00e+0) − 8.5313e-17 (2.74e-19) − 0.0000e+0 (0.00e+0) − 8.8216e-17 (2.34e-19) +20 29 2.2346e-29 (9.71e-32) 0.0000e+0 (0.00e+0) − 2.1928e-29 (2.63e-31) − 0.0000e+0 (0.00e+0) − 2.2388e-29 (6.46e-32) ≈
DTLZ7
5 24 2.0167e+0 (3.51e-2) 2.2262e+0 (1.99e-2) + 1.3316e-1 (1.26e-1) − 1.6548e+0 (1.71e-2) − 1.9838e+0 (7.22e-2) ≈8 27 2.3221e+0 (1.61e-2) 1.7276e+0 (1.08e-1) − 2.7269e-2 (4.43e-2) − 1.2244e-0 (2.62e-1) − 2.2132e+0 (2.91e-2) −10 29 2.4041e+0 (3.75e-2) 9.0524e-1 (1.67e-1) − 7.1790e-2 (1.73e-1) − 1.5370e-1 (1.49e-1) − 2.1785e+0 (8.57e-2) −15 24 2.2840e+0 (1.72e-1) 1.9208e+0 (1.06e-1) ≈ 3.6223e-1 (9.43e-2) − 4.3057e-2 (4.34e-2) − 1.3168e+0 (3.57e-1) −20 29 1.7842+0 (1.98e-1) 1.6866e+0 (6.00e-2) − 1.0922e-5 (1.96e-5) − 2.4452e-3 (1.96e-3) − 3.5167e-1 (1.14e-1) −
+/ − / ≈ 9/23/3 7/28/2 0/35/0 7/14/14
”+”, ”-” and ”≈” indicate that the result is significantly better, significantly worse and statistically similar to that obtained by NSGA-II+AD, respectively.
Table 7
HV results (mean and SD) of the five algorithms on the WFG test suite. The best and the second mean among the algorithms for each
problem instance are highlighted in gray background and bold, respectively.
Problem M D NSGA-II+AD GrEA MOEA/D ε SADCAEOM-
WFG1
5 28 5.8425e+3 (1.20e+2) 4.9280e+3 (4.65e+2) − 4.5726e+3 (4.43e+2) − 2.1211e+3 (4.41e+1) − 5.7515e+3 (1.68e+2) −8 34 2.0632e+7 (9.97e+3) 1.5161e+7 (2.31e+6) − 1.3706e+7 (1.94e+6) − 7.2539e+6 (9.04e+5) − 2.0264e+7 (7.46e+5) −10 38 8.6472e+9 (3.12e+6) 6.3780e+9 (6.78e+8) − 3.1680e+9 (5.92e+8) − 2.7023e+9 (3.06e+8) − 8.3454e+9 (4.99e+8) −15 48 1.3899e+17 (3.42e+13) 1.3785e+17 (9.59e+14) − 4.8927e+16 (7.88e+15) − 3.4102e+16 (1.49e+15) − 1.2142e+17 (1.37e+16) −20 58 1.0837e+25 (5.48e+23) 1.0029e+25 (6.47e+23) − 2.4862e+24 (2.81e+23) − 2.2694e+24 (3.39e+23) − 1.0589e+25 (5.90e+23) −
WFG2
5 28 6.0775e+3 (5.10e+0) 5.9312e+3 (3.17e+1) − 5.6273e+3 (9.99e+1) − 5.7445e+3 (7.87e+1) − 6.0452e+3 (1.04e+1) −8 34 2.1991e+7 (2.89e+4) 2.1401e+7 (1.05e+5) − 1.8859e+7 (1.18e+6) − 1.9385e+7 (3.69e+6) − 2.1580e+7 (1.08e+5) −10 38 9.5767e+9 (1.91e+7) 9.3151e+9 (6.73e+7) − 8.3644e+9 (3.66e+8) − 8.6920e+9 (1.04e+9) − 9.3715e+9 (4.84e+7) −15 48 1.7696e+17 (2.46e+14) 1.7341e+17 (1.08e+15) − 1.5288e+17 (7.28e+15) − 1.7499e+17 (2.00e+15) − 1.7040e+17 (1.60e+15) −20 58 1.6937e+25 (7.42e+22) 1.6559e+25 (1.19e+23) − 1.2975e+25 (8.31e+23) − 1.5137e+25 (1.22e+24) − 1.6273e+25 (1.69e+23) −
WFG3
5 28 2.8919e+0 (7.87e-2) 1.8652e+0 (3.52e-1) − 3.8335e-1 (3.99e-1) − 1.2746e-1 (2.21e-1) − 2.7400e+0 (1.18e-1) −8 34 1.2908e-2 (3.55e-3) 1.8515e-2 (6.70e-3) + 0.0000e+0 (0.00e+0) − 0.0000e+0 (0.00e+0) − 5.6306e-3 (3.97e-3) −10 38 1.0244e-5 (1.23e-5) 1.5611e-5 (8.00e-6) + 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 5.5192e-7 (2.65e-6) −15 48 0.0000e+0 (0.00e+0) 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈20 58 0.0000e+0 (0.00e+0) 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈
WFG4
5 28 4.0058e+3 (6.91e+0) 4.6981e+3 (1.80e+1) + 3.4758e+3 (1.51e+2) − 4.1242e+3 (8.31e+1) + 3.9922e+3 (8.48e+0) −8 34 1.6917e+7 (5.65e+4) 1.9374e+7 (1.84e+5) + 6.5549e+6 (8.80e+5) − 1.0100e+7 (1.40e+6) − 1.6843e+7 (7.21e+4) −10 38 7.8040e+9 (2.22e+7) 7.6770e+9 (3.02e+8) − 3.0285e+9 (4.91e+8) − 5.7940e+9 (4.73e+8) − 7.7590e+9 (4.99e+7) −15 48 1.6394e+17 (9.19e+14) 1.6035e+17 (1.21e+15) − 2.2562e+16 (8.85e+15) − 8.1631e+16 (2.81e+16) − 1.5473e+17 (1.48e+15) −20 58 1.5522e+25 (2.91e+23) 1.5416e+25 (3.26e+23) ≈ 8.9956e+24 (1.98e+24) − 1.0987e+25 (1.20e+24) − 1.4951e+25 (2.72e+23) −
WFG5
5 28 3.7015e+3 (6.11e+0) 4.4965e+3 (1.29e+1) + 3.4749e+3 (1.48e+2) − 3.9569e+3 (8.11e+1) + 3.7072e+3 (7.60e+0) +8 34 1.5620e+7 (5.19e+4) 1.8484e+7 (7.66e+4) + 7.1593e+6 (6.89e+5) − 9.6277e+6 (9.83e+5) − 1.5651e+7 (4.34e+4) ≈10 38 7.1934e+9 (2.36e+7) 8.1664e+9 (2.28e+8) + 2.4829e+9 (2.14e+8) − 4.8907e+9 (4.87e+8) − 7.2052e+9 (2.71e+7) ≈15 48 1.4525e+17 (4.62e+14) 1.4429e+17 (2.17e+15) ≈ 2.8521e+16 (6.35e+15) − 1.0243e+17 (1.22e+16) − 1.4457e+17 (7.84e+14) ≈20 58 1.4464e+25 (6.16e+22) 1.3774e+25 (1.76e+23) − 7.2635e+24 (1.24e+24) − 8.2017e+24 (2.35e+24) − 1.4045e+25 (1.54e+23) −
WFG6
5 28 3.5749e+3 (1.15e+2) 4.4569e+3 (7.48e+1) + 2.6684e+3 (2.38e+2) − 3.6444e+3 (1.39e+2) + 3.5874e+3 (9.99e+1) ≈8 34 1.5341e+7 (5.06e+5) 1.8063e+7 (4.72e+5) + 2.3162e+6 (2.89e+5) − 8.6665e+6 (9.89e+5) − 1.4928e+7 (6.07e+5) −10 38 6.8342e+9 (1.91e+8) 7.8934e+9 (2.02e+8) + 9.2613e+8 (3.31e+8) − 6.6464e+8 (4.00e+8) − 6.8186e+9 (2.58e+8) ≈15 48 1.3419e+17 (1.02e+16) 1.4817e+17 (4.01e+15) + 9.0731e+15 (2.09e+15) − 2.6149e+15 (6.03e+14) − 1.3571e+17 (5.85e+15) ≈20 58 1.4053e+25 (5.95e+23) 1.3987e+25 (4.67e+23) − 9.9388e+24 (9.12e+23) − 2.8717e+23 (6.25e+22) − 1.3619e+25 (5.53e+23) ≈
WFG7
5 28 3.9858e+3 (9.53e+0) 4.8225e+3 (8.82e+0) + 3.1898e+3 (2.21e+2) − 4.1663e+3 (4.16e+1) + 3.9854e+3 (9.32e+0) ≈8 34 1.6659e+7 (5.30e+4) 1.9781e+7 (9.28e+4) + 5.5036e+6 (1.55e+6) − 9.0292e+6 (2.49e+5) − 1.6864e+7 (4.28e+4) +10 38 7.7112e+9 (3.00e+7) 8.7758e+9 (2.08e+8) + 1.4770e+9 (6.95e+8) − 4.1598e+9 (1.93e+9) − 7.7684e+9 (7.23e+7) +15 48 1.5784e+17 (4.49e+14) 1.6123e+17 (3.55e+15) + 2.5056e+16 (1.27e+16) − 5.7846e+16 (4.64e+16) − 1.5749e+17 (1.25e+15) ≈20 58 1.5078e+25 (3.64e+23) 1.5554e+25 (2.09e+23) + 3.4001e+24 (1.53e+24) − 6.4296e+24 (1.07e+24) − 1.3944e+25 (3.61e+23) −
WFG8
5 28 2.7521e+3 (2.14e+1) 4.0357e+3 (2.43e+1) + 1.8859e+3 (8.95e+2) ≈ 3.5402e+3 (1.43e+1) + 2.7845e+3 (3.91e+1) ≈8 34 1.1255e+7 (3.14e+5) 1.6637e+7 (2.79e+5) + 7.6165e+5 (1.29e+6) − 1.1786e+7 (7.96e+5) − 1.1603e+7 (6.36e+5) ≈10 38 5.3731e+9 (4.30e+8) 7.6851e+9 (1.18e+8) + 8.9075e+8 (2.30e+9) − 3.3513e+9 (1.03e+9) − 5.4055e+9 (2.73e+8) ≈15 48 1.2511e+17 (9.49e+15) 1.5210e+17 (1.31e+15) + 0.0000e+0 (0.00e+0) − 5.6088e+16 (4.75e+16) − 1.1852e+17 (8.70e+15) −20 58 1.3141e+25 (1.13e+24) 1.4651e+25 (8.57e+22) + 1.4114e+22 (2.82e+22) − 3.4150e+24 (1.86e+24) − 1.2479e+25 (1.01e+24) −
WFG9
5 28 3.9126e+3 (1.63e+1) 4.5151e+3 (1.50e+1) + 2.9949e+3 (3.85e+2) − 4.0479e+3 (4.40e+1) + 3.8707e+3 (5.86e+1) −8 34 1.6211e+7 (2.65e+5) 1.7957e+7 (2.68e+5) + 5.8459e+6 (1.72e+6) − 1.0749e+7 (9.21e+5) − 1.5595e+7 (1.09e+6) −10 38 7.3481e+9 (2.07e+8) 8.0696e+9 (2.48e+8) + 8.3015e+8 (9.01e+8) − 3.8171e+9 (2.17e+9) − 7.0520e+9 (4.97e+8) −15 48 1.3562e+17 (8.85e+15) 1.4881e+17 (1.48e+15) + 2.6361e+16 (1.67e+16) − 1.1232e+17 (3.25e+15) − 1.2886e+17 (7.97e+15) −20 58 1.3019e+25 (5.80e+23) 1.4093e+25 (2.43e+23) + 4.4725e+24 (1.60e+24) − 8.1349e+24 (1.18e+24) − 1.2517e+25 (7.66e+23) −
+/ − / ≈ 21/03/33/63/64/14/04/02/52
”+”, ”-” and ”≈” indicate that the result is significantly better, significantly worse and statistically similar to that obtained by NSGA-II+AD, respectively.

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 391
Table 8
HV results (mean and SD) of the five algorithms on the DTLZ test suite. The best and the second mean among the algorithms for each
problem instance are highlighted in gray background and bold, respectively.
Problem M D NSGA-II+AD PICEAg MaOEARD VaEA KnEA
DTLZ1
5 9 4.5874e-2 (2.34e-4) 1.6019e-2 (3.99e-3) − 4.7362e-2 (4.78e-4) + 3.3939e-2 (1.84e-2) − 3.4511e-2 (7.40e-3) −8 12 8.1246e-3 (1.90e-5) 1.9150e-3 (3.82e-4) − 7.3150e-3 (4.86e-4) − 6.6560e-3 (2.12e-3) − 6.8324e-3 (1.88e-3) −10 14 2.4945e-3 (5.31e-6) 4.9511e-4 (5.95e-5) − 1.1518e-3 (8.73e-4) − 1.7113e-3 (8.65e-4) − 0.0000e+0 (0.00e+0) −15 24 1.2705e-4 (7.42e-8) 1.8075e-5 (7.01e-6) − 1.0258e-4 (1.07e-5) − 1.0154e-4 (3.77e-5) − 0.0000e+0 (0.00e+0) −20 29 6.4082e-6 (3.72e-9) 1.1205e-6 (7.62e-7) − 4.9711e-6 (4.29e-7) − 2.8170e-6 (2.15e-6) − 0.0000e+0 (0.00e+0) −
DTLZ2
5 14 1.1529e+0 (1.14e-2) 1.1677e+0 (2.38e-2) + 1.0446e+0 (2.30e-2) − 1.2575e+0 (5.68e-3) + 1.2657e+0 (1.15e-2) +8 17 1.7675e+0 (1.64e-2) 1.5222e+0 (8.39e-2) − 1.2337e+0 (7.42e-2) − 1.8721e+0 (2.46e-2) + 1.8947e+0 (2.23e-2) +10 19 2.2489e+0 (2.09e-2) 1.8171e+0 (1.10e-1) − 1.1735e+0 (1.43e-1) − 1.2929e+0 (3.83e-1) − 2.3431e+0 (8.29e-2) +15 24 3.8630e+0 (3.09e-2) 2.7683e+0 (1.73e-1) − 1.5435e+0 (3.44e-1) − 3.3761e+0 (2.06e-1) − 4.1027e+0 (1.16e-2) +20 29 6.3982e+0 (4.21e-2) 4.3959e+0 (2.82e-1) − 2.2676e+0 (3.14e-1) − 4.4919e+0 (4.31e-1) − 6.3468e+0 (9.68e-1) −
DTLZ3
5 14 1.1393e+0 (1.61e-2) 3.8450e-1 (1.13e-1) − 1.1067e+0 (3.13e-2) ≈ 9.7596e-1 (1.47e-1) − 6.6070e-1 (2.39e-1) −8 17 1.7496e+0 (3.05e-2) 3.4042e-1 (6.62e-2) − 8.6162e-1 (6.59e-1) − 3.2048e-2 (1.52e-1) − 0.0000e+0 (0.00e+0) −10 19 2.2231e+0 (3.68e-2) 3.7802e-1 (6.46e-2) − 7.0236e-1 (6.31e-1) − 0.0000e+0 (0.00e+0) − 0.0000e+0 (0.00e+0) −15 24 3.8375e+0 (6.73e-2) 3.2125e-1 (3.13e-2) − 1.0456e+0 (1.05e+0) − 0.0000e+0 (0.00e+0) − 0.0000e+0 (0.00e+0) −20 29 6.3332e+0 (1.34e-1) 4.6535e-1 (6.18e-2) − 6.5421e-1 (1.02e+0) − 0.0000e+0 (0.00e+0) − 0.0000e+0 (0.00e+0) −
DTLZ4
5 14 1.1774e+0 (9.44e-3) 1.0650e+0 (2.06e-1) ≈ 1.0790e+0 (5.25e-2) ≈ 1.2550e+0 (8.07e-3) + 1.2773e+0 (1.24e-2) +8 17 1.8037e+0 (1.28e-2) 1.7904e+0 (5.91e-2) ≈ 1.5641e+0 (9.10e-2) − 1.8404e+0 (2.96e-2) + 1.9371e+0 (1.86e-2) +10 19 2.2857e+0 (1.91e-2) 2.1585e+0 (1.71e-1) ≈ 1.9399e+0 (7.49e-2) − 2.0004e+0 (1.43e-1) − 2.4627e+0 (1.96e-2) +15 24 3.9393e+0 (2.37e-2) 3.7050e+0 (8.66e-2) − 3.3898e+0 (1.33e-1) − 3.6023e+0 (1.50e-1) − 4.0854e+0 (1.92e-2) +20 29 6.6009e+0 (1.03e-2) 5.9393e+0 (1.23e-1) − 5.7553e+0 (2.14e-1) − 5.1063e+0 (3.37e-1) − 6.6437e+0 (1.86e-2) +
DTLZ5
5 14 9.1838e-3 (2.29e-5) 6.4987e-3 (8.63e-5) − 6.4704e-3 (4.09e-8) − 6.9137e-3 (3.76e-4) − 3.9186e-3 (2.02e-3) −8 17 1.9553e-5 (5.01e-8) 1.7218e-5 (4.60e-7) − 1.6815e-5 (5.37e-9) − 1.6259e-5 (8.47e-7) − 6.2703e-6 (5.35e-6) −10 19 6.1910e-8 (1.57e-10) 5.6908e-8 (1.15e-9) − 5.6188e-8 (2.56e-11) − 5.2471e-8 (4.54e-9) − 1.7660e-8 (1.72e-8) −15 24 8.7763e-17 (3.28e-19) 8.4304e-17 (1.72e-20) − 8.3949e-17 (5.44e-19) − 8.3122e-17 (1.76e-18) − 1.2456e-17 (2.07e-17) −20 29 2.2299e-29 (6.74e-32) 2.1826e-29 (5.56e-33) − 2.1818e-29 (2.71e-32) − 1.6586e-29 (3.10e-30) − 2.6653e-30 (6.27e-30) −
DTLZ6
5 14 9.1915e-3 (2.78e-5) 7.2682e-3 (5.42e-4) − 6.4705e-3 (0.00e+0) − 5.4077e-3 (2.15e-3) − 4.7887e-3 (2.87e-3) −8 17 1.9550e-5 (4.72e-8) 1.6831e-5 (5.89e-13) − 1.6821e-5 (0.00e+0) − 1.6779e-6 (5.12e-6) − 2.2198e-6 (5.61e-6) −10 19 6.2084e-8 (1.39e-10) 5.6231e-8 (6.94e-24) − 5.6218e-8 (0.00e+0) − 3.7559e-9 (1.43e-8) − 2.4005e-9 (1.06e-8) −15 24 8.7977e-17 (3.34e-19) 8.4335e-17 (1.29e-32) − 8.4321e-17 (1.31e-32) − 2.8109e-17 (4.04e-17) − 2.5103e-18 (1.37e-17) −20 29 2.2346e-29 (9.71e-32) 2.1862e-29 (5.88e-45) − 2.1834e-29 (2.97e-45) − 2.9152e-30 (7.56e-30) − 0.0000e+0 (0.00e+0) −
DTLZ7
5 24 2.0167e+0 (3.51e-2) 1.6028e+0 (3.33e-1) − 1.5284e+0 (5.80e-2) − 1.9821e+0 (3.94e-2) ≈ 2.2666e+0 (3.10e-2) +8 27 2.3221e+0 (1.61e-2) 1.4317e+0 (6.02e-2) − 2.6157e-1 (1.58e-1) − 1.3323e+0 (1.77e-1) − 1.5039e+0 (1.93e-1) −10 29 2.4041e+0 (3.75e-2) 1.4387e+0 (5.79e-2) − 5.4562e-2 (5.82e-2) − 1.4074e-1 (3.05e-1) − 9.3581e-1 (2.80e-1) −15 24 2.2840e+0 (1.72e-1) 1.4484e+0 (5.74e-2) − 6.4608e-4 (1.12e-3) − 7.0452e-1 (2.14e-1) − 3.1193e-4 (1.09e-3) −20 29 1.7842+0 (1.98e-1) 1.2521e+0 (2.98e-2) ≈ 4.7367e-5 (1.09e-4) − 1.5099e-2 (3.36e-2) − 0.0000e+0 (0.00e+0) −
+/ − / ≈ 1/30/4 1/32/2 4/30/1 10/25/0
”+”, ”-” and ”≈” indicate that the result is significantly better, significantly worse and statistically similar to that obtained by NSGA-II+AD, respectively.
Table 9
HV results (mean and SD) of the five algorithms on the DTLZ test suite. The best and the second mean among the algorithms for each
problem instance are highlighted in gray background and bold, respectively.
Problem M D AEnKAEaVDRAEOaMgAECIPDA+II-AGSN
WFG1
5 28 5.8425e+3 (1.20e+2) 5.5932e+3 (2.10e+2) ≈ 2.9457e+3 (9.42e+2) − 3.6534e+3 (3.27e+2) − 5.3553e+3 (2.17e+2) −8 34 2.0632e+7 (9.97e+3) 2.0556e+7 (2.04e+5) ≈ 8.7541e+6 (2.84e+6) − 1.0082e+7 (6.91e+5) − 1.7777e+7 (1.07e+6) −10 38 8.6472e+9 (3.12e+6) 8.6147e+9 (1.66e+7) − 3.0679e+9 (5.13e+8) − 3.8692e+9 (5.29e+8) − 7.4835e+9 (9.82e+8) −15 48 1.3899e+17 (3.42e+13) 1.3780e+17 (3.51e+14) ≈ 3.4310e+16 (5.27e+15) − 5.2126e+16 (8.78e+15) − 9.5304e+16 (3.10e+16) −20 58 1.0837e+25 (5.48e+23) 9.3357e+24 (9.63e+23) − 2.2579e+24 (4.35e+23) − 2.2954e+24 (1.93e+23) − 5.5775e+24 (1.79e+24) −
WFG2
5 28 6.0775e+3 (5.10e+0) 5.8561e+3 (1.18e+2) − 5.8616e+3 (7.37e+1) − 6.0942e+3 (1.27e+1) + 6.1076e+3 (9.39e+0) +8 34 2.1991e+7 (2.89e+4) 2.0986e+7 (3.30e+5) − 2.0996e+7 (4.39e+5) − 2.1871e+7 (7.70e+4) − 2.1869e+7 (4.82e+4) −10 38 9.5767e+9 (1.91e+7) 8.9992e+9 (7.87e+7) − 9.1639e+9 (9.48e+7) − 9.5260e+9 (3.12e+7) − 9.5188e+9 (2.85e+7) −15 48 1.7696e+17 (2.46e+14) 1.6198e+17 (2.88e+15) − 1.6755e+17 (2.71e+15) − 1.7685e+17 (5.82e+14) − 1.7321e+17 (4.33e+15) −20 58 1.6937e+25 (7.42e+22) 1.4574e+25 (1.96e+24) − 1.5722e+25 (1.39e+23) − 1.6994e+25 (8.08e+22) + 1.5911e+25 (5.28e+23) −
WFG3
5 28 2.8919e+0 (7.87e-2) 2.1822e+0 (2.36e-1) − 4.1796e-1 (5.60e-1) − 1.2350e+0 (1.88e-1) − 6.6087e-1 (2.44e-1) −8 34 1.2908e-2 (3.55e-3) 2.0237e-2 (1.40e-3) + 0.0000e+0 (0.00e+0) − 5.5873e-3 (3.21e-3) − 0.0000e+0 (0.00e+0) −10 38 1.0244e-5 (1.23e-5) 5.4966e-5 (4.30e-6) + 0.0000e+0 (0.00e+0) − 3.4609e-6 (5.45e-6) ≈ 0.0000e+0 (0.00e+0) −15 48 0.0000e+0 (0.00e+0) 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈20 58 0.0000e+0 (0.00e+0) 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈ 0.0000e+0 (0.00e+0) ≈
WFG4
5 28 4.0058e+3 (6.91e+0) 4.6777e+3 (5.79e+1) + 3.6140e+3 (2.85e+2) ≈ 4.5928e+3 (2.96e+1) + 4.7239e+3 (2.01e+1) +8 34 1.6917e+7 (5.65e+4) 1.5379e+7 (1.59e+6) ≈ 1.1883e+7 (1.77e+6) − 1.8841e+7 (2.03e+5) + 1.9570e+7 (4.31e+1) +10 38 7.8040e+9 (2.22e+7) 6.3983e+9 (9.73e+8) − 5.4068e+9 (6.07e+8) − 8.4124e+9 (7.01e+7) + 9.0679e+9 (2.10e+7) +15 48 1.6394e+17 (9.19e+14) 1.0426e+17 (1.76e+16) − 9.7469e+16 (8.64e+15) − 1.5849e+17 (1.90e+15) − 1.7427e+17 (5.68e+14) +20 58 1.5522e+25 (2.91e+23) 2.8922e+24 (1.48e+24) − 8.7864e+24 (7.92e+23) − 1.4978e+25 (2.10e+23) − 1.5953e+25 (1.18e+24) +
WFG5
5 28 3.7015e+3 (6.11e+0) 4.3438e+3 (7.25e+1) + 3.2694e+3 (9.48e+1) − 4.4000e+3 (3.11e+1) + 4.4746e+3 (2.37e+1) +8 34 1.5620e+7 (5.19e+4) 1.3892e+7 (1.45e+6) − 1.1198e+7 (6.74e+5) − 1.7980e+7 (1.28e+5) + 1.8264e+7 (2.14e+5) +10 38 7.1934e+9 (2.36e+7) 5.3548e+9 (4.91e+8) − 4.2400e+9 (5.70e+8) − 7.9657e+9 (5.48e+7) + 8.5046e+9 (1.84e+7) +15 48 1.4525e+17 (4.62e+14) 8.0010e+16 (1.40e+15) − 7.3247e+16 (6.61e+15) − 1.4826e+17 (1.42e+15) + 1.6209e+17 (5.19e+14) +20 58 1.4464e+25 (6.16e+22) 1.3207e+24 (5.01e+23) − 7.2920e+24 (1.51e+24) − 1.3868e+25 (1.53e+23) − 1.5656e+25 (5.44e+22) +
WFG6
5 28 3.5749e+3 (1.15e+2) 4.1717e+3 (9.65e+1) + 3.1614e+3 (1.42e+2) − 4.2615e+3 (1.27e+2) + 4.3131e+3 (9.29e+1) +8 34 1.5341e+7 (5.06e+5) 1.5467e+7 (3.95e+5) + 1.0588e+7 (2.09e+6) − 1.7666e+7 (3.05e+5) + 1.7313e+7 (5.42e+5) +10 38 6.8342e+9 (1.91e+8) 6.4936e+9 (4.02e+8) ≈ 3.8789e+9 (8.58e+8) − 7.8409e+9 (1.90e+8) + 8.2036e+9 (2.90e+8) +15 48 1.3419e+17 (1.02e+16) 9.8257e+16 (1.25e+16) − 7.5573e+16 (1.35e+16) − 1.5069e+17 (6.68e+15) + 1.5742e+17 (5.62e+15) +20 58 1.4053e+25 (5.95e+23) 1.1473e+24 (5.75e+23) − 5.9903e+24 (1.03e+24) − 1.3898e+25 (4.71e+23) ≈ 1.4872e+25 (3.97e+23) +
WFG7
5 28 3.9858e+3 (9.53e+0) 4.5915e+3 (8.07e+1) + 3.0065e+3 (1.93e+2) − 4.6946e+3 (3.23e+1) + 4.7836e+3 (2.67e+1) +8 34 1.6659e+7 (5.30e+4) 1.8293e+7 (9.37e+5) + 8.7424e+6 (1.72e+6) − 1.9519e+7 (1.92e+5) + 1.9401e+7 (1.76e+5) +10 38 7.7112e+9 (3.00e+7) 7.3057e+9 (6.83e+8) ≈ 2.6565e+9 (1.22e+9) − 8.7427e+9 (7.63e+7) + 9.0369e+9 (9.53e+7) +15 48 1.5784e+17 (4.49e+14) 1.2212e+17 (1.60e+16) − 4.5887e+16 (1.48e+16) − 1.6464e+17 (3.06e+15) + 1.7526e+17 (7.36e+14) +20 58 1.5078e+25 (3.64e+23) 1.1376e+25 (1.36e+24) − 4.2140e+24 (1.74e+24) − 1.5866e+25 (1.99e+23) + 1.5743e+25 (8.52e+23) +
WFG8
5 28 2.7521e+3 (2.14e+1) 3.7763e+3 (9.54e+1) + 2.7978e+3 (2.50e+2) ≈ 3.8525e+3 (7.94e+1) + 3.9084e+3 (7.31e+1) +8 34 1.1255e+7 (3.14e+5) 1.5377e+7 (7.81e+5) + 1.0218e+7 (2.75e+6) ≈ 1.5410e+7 (2.48e+5) + 1.5959e+7 (4.45e+5) +10 38 5.3731e+9 (4.30e+8) 6.8649e+9 (3.97e+8) + 4.6810e+9 (9.20e+8) ≈ 7.2276e+9 (1.09e+8) + 7.1055e+9 (6.84e+8) +15 48 1.2511e+17 (9.49e+15) 1.1882e+17 (1.53e+16) − 8.1001e+16 (1.14e+16) − 1.4664e+17 (4.41e+15) + 1.3008e+17 (2.29e+16) ≈20 58 1.3141e+25 (1.13e+24) 1.1328e+25 (1.73e+24) − 7.0935e+24 (1.22e+24) − 1.5167e+25 (1.84e+23) + 1.1869e+25 (2.86e+24) ≈
WFG9
5 28 3.9126e+3 (1.63e+1) 4.4570e+3 (6.68e+1) + 2.9265e+3 (1.58e+2) − 4.2752e+3 (1.20e+2) + 4.5746e+3 (2.80e+1) +8 34 1.6211e+7 (2.65e+5) 1.5357e+7 (1.72e+6) ≈ 8.0088e+6 (8.92e+5) − 1.6527e+7 (1.20e+6) + 1.8495e+7 (8.91e+5) +10 38 7.3481e+9 (2.07e+8) 5.7145e+9 (6.97e+8) − 3.4804e+9 (6.69e+8) − 6.9523e+9 (5.79e+8) − 8.1776e+9 (6.50e+8) +15 48 1.3562e+17 (8.85e+15) 8.0756e+16 (1.63e+16) − 5.9948e+16 (1.15e+16) − 1.2948e+17 (1.13e+16) − 1.5123e+17 (1.32e+16) +20 58 1.3019e+25 (5.80e+23) 8.2074e+24 (9.28e+23) − 5.5214e+24 (1.42e+24) − 1.3294e+25 (5.74e+23) + 1.3761e+25 (1.11e+24) +
+/ − / ≈ 4/21/924/61/526/93/09/42/21
”+”, ”-” and ”≈” indicate that the result is significantly better, significantly worse and statistically similar to that obtained by NSGA-II+AD, respectively.

392 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Fig. 7. The final solution set of the two algorithms on the ten-objective DTLZ1, shown by parallel coordinates. Where the abscissa represents the objective
dimension and the ordinate indicates the objective value.
a single run of NSGA-II and NSGA-II + AD on the 10-objective DTLZ1 by parallel coordinates 2 [34] . The global optimal front
of this problem is a linear hyper-plane satisfying ∑ M
i =1 f i = 0 . 5 in the range f i ∈ [0, 0.5]. This particular run is associated
with the result which is the closest to the mean IGD value. It is clear from the figure that the convergence performance of
NSGA-II is significantly improved when the angle dominance is applied to the algorithm.
Through the above analysis, we can show that integrating the angle dominance criterion into NSGA-II is going to be
effective.
5.3. Comparison with well-established algorithms
In this section, NSGA-II + AD is applied to compare with four well-established MOEAs to demonstrate whether the NSGA-
II + AD is competitive when addressing MaOPs. The compared MOEAs are GrEA, MOEA/D, ε-MOEA and CDAS, respectively.
Table 6 shows the comparative results of the investigated algorithms on the DTLZ problem suite regarding the mean and
standard deviation (SD) of the HV values, where the gray background and bold represent the best and second best results,
respectively. On the whole, NSGA-II + AD is the best performing algorithm and followed closely by CDAS. The former gains 8
best results and 25 second-best results, and the latter owns 14 best results and 7 second-best results. Although the number
of best results obtained by NSGA-II + AD is lightly less than that obtained by CDAS, the sum of the best and second-best
results of the former far exceeds that of the latter. In particular, NSGA-II + AD only performs worse than GrEA and MOEA/D
on DTLZ2 but performs better on other problems, while CDAS does best on DTLZ3 and degradation problems (e.g., DTLZ5 and
DTLZ6). GrEA is the third-best algorithm, and it performs better on DTLZ2 and DTLZ4 compared to other four algorithms. It
was followed by MOEA/D, which produced three and one of the best results on DTLZ1 and DTLZ3, respectively. Compared
with the above four algorithms, ε-MOEA is inferior in DTLZ test problems. The sum of its best and second-best results is
zero. As for the statistical significance analysis, it can be observed that the difference between NSGA-II + AD and the peer
algorithms is significant on most of the test instances. Specifically, the proportion of the test instances where NSGA-II + AD
outperforms GrEA, MOEA/D, ε-MOEA and CDAS with statistical significance is 23/35, 28/35, 35/35 and 14/35, respectively.
Conversely, the proportion of the instances where NSGA-II + AD performs worse than GrEA, MOEA/D, ε-MOEA and CDAS with
statistical significance is 9/35, 7/35, 0/35 and 7/35, respectively.
Table 7 gives the comparative results of the four well −established algorithms on the WFG problems with 5, 8, 10, 15 and
20 objectives. As shown, the best −performing algorithm is GrEA, which has a clear advantage over the other 4 algorithms
on more of the test instances. In addition, NSGA −II + AD is second only to GrEA. Specifically, GrEA obtains the best and
second −best HV results on 26 and 5 out of the 45 instances respectively, and NSGA −II + AD on 17 and 14 respectively.
In fact, GrEA, despite being brought up several years ago, has shown to be very competitive against state of the arts on
this particular type of problems (i.e., WFG4 −WFG9) [31] . NSGA −II + AD is less than GrEA in terms of the number of best
results, but the sum of the best results and the second −best results obtained by the two algorithms is the same. For other
three algorithms, they are inferior to the above two algorithms in WFG test problems. CDAS and ε−MOEA only have the
second −best solutions, while MOEA/D performs poorly on all instances. Concerning the statistical results, in addition to GrEA
which is significantly better than our method on 25 instances and worse than our method on 20 instances, our proposed
method outperforms other algorithms in most of the test instances. For example, NSGA −II + AD performs significantly better
than MOEA/D, ε−MOEA and CDAS, respectively on 41, 36 and 30 test instances over all 45 problems.
2 Parallel coordinates display multidimensional data (a set of vectors) in a two-dimensional graph, with each dimension of the original data being
translated onto a vertical axis in the graph, and a vector is represented as a polyline with vertices on the axes.

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 393
Fig. 8. The final solution set of the nine algorithms on the 20 −objective DTLZ5, shown by parallel coordinates. Where the abscissa represents the objective
dimension and the ordinate indicates the objective value.
5.4. Comparison with state −of −the −art algorithms
In this section, we select four state −of −the −art algorithms for comparison tests with NSGA −II + AD. The four algorithms
are PICEAg, MaOEARD, VaEA and KnEA, respectively.
As can be observed from Table 8 , NSGA −II + AD performs best, presenting a clear advantage over the other four algorithms
on the majority of the test instances. More specifically, It obtains the best and second best HV results on 24 and 7 out
of the 35 test instances respectively. KnEA works well for some relatively simple problems (e.g., DTLZ2 and DTLZ4). For
multi −mode problems (e.g., DTLZ1 and DTLZ3), the performance of KnEA is far inferior to other algorithms. The main reason
is that it is difficult to converge on this problem. For other three algorithms, they obtain worse HV values on almost all
the test instances, except for five −objecti ve DTLZ1. Statistically, NSGA −II + AD shows significant improvement over other
algorithms on most of the test instances. Specifically, the proportion of the test instances where NSGA −II + AD performs
better than PICEAg, MaOEARD, VaEA and KnEA is 30/35, 32/35, 30/35 and 25/35, respectively. Conversely, the proportion
that NSGA −II + AD is defeated by the peer algorithms only is 1/35, 1/35, 4/35 and 10/35 for PICEAg, MaOEARD, VaEA and
KnEA, respectively.
Different from the performance on the DTLZ test problem, NSGA −II + AD is not as good as the other algorithms on the
WFG test problem. As shown in Table 9 , the HV results of WFG test instances are given. The best performing algorithm is
KnEA, which gets 25 best results and 5 second −best results, respectively. It was closely followed by the VaEA. Although
the number of VaEA’s best results is far less than KnEA’s, its second −best solutions account for the vast majority. For
NSGA −II + AD, what we can observe is that for problems with complicated fronts (such as WFG1 and WFG2), and with
higher dimensional objective space (such as 15 −objective WFG4 and WFG9, 20 −objective WFG4 −WFG8, etc.), NSGA −II + AD

394 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
Fig. 9. The final solution set of the six algorithms on the ten −objective WFG1, shown by parallel coordinates. Where the abscissa represents the objective
dimension and the ordinate indicates the objective value.
achieve better performance. For PICEAg, it performs best on the WFG3 with 8 −objective and 10 −objective but struggles on
other problems with high dimension. For MaOEARD, it obtains worse HV values on almost all the test instances. Accord-
ing to statistical test, NSGA −II + AD is significantly superior to PICEAg, MaOEARD, VaEA and KnEA on 24, 39, 15 and 12 test
instances while it is inferior to PICEAg, MaOEARD, VaEA and KnEA on 12, 0, 25 and 29 test instances.
5.5. Visualization of experimental results
To intuitively illustrate the results in terms of convergence and diversity, we chose 20 −objective DTLZ5 and 10 −objective
WFG1 as examples. As shown in Fig. 8 , this figure plots the final solutions of one run with respect to the 20 −objective DTLZ5
by the parallel coordinate [34] . This test problem has a degenerate Pareto front. This particular run is associated with the
result which is the closest to the mean HV value. It is clear from Fig. 8 that the solutions of GrEA , ε−MOEA , PICEAg, VaEA
and KnEA fail to converge into the optimal front. Although MOEA/D and MaOEAD can converge, they struggle to maintain
diversity, with their solutions converging into the local area of the Pareto front. NSGA −II + AD and CDAS perform similarly.
The only difference is that the solutions obtained by the latter is slightly more distributive than that of the former.
For the 10 −objective WFG1, the final solutions obtained by all the algorithms are shown in Fig. 9 . It is clear from this
figure that solutions of NSGA −II + AD are with highest quality in terms of both the convergence and extensity and the upper
and lower bounds of obtained objective i are 0 and 2 · i , respectively. However, what needs to be pointed out is that some
middle regions of the Pareto front have not been covered by NSGA −II + AD. For GrEA, MOEA/D and MaOEARD, their solutions
converge to the local area of Pareto front. The solutions obtained by PICEAg are better than the above algorithms in terms
of diversity, but fail to reach some regions of the Pareto front. For VaEA and KnEA, the solutions obtained by the former
is more extensive than the latter, but the latter is more uniform than the former. The distribution of solutions obtained by
CDAS is similar to that of NSGA −II + AD, while our algorithm is better than CDAS in extensity.

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 395
Fig. 10. The average number of solutions in all the nondominated layers under the angle nondominated sorting, where the population size is 100, the
number of runs is 30.
In addition, this section extends the study on the selection pressure of angle dominance in the objective space. Here we
consider eight instances based on the Pareto front of the problems 3 to demonstrate the average number of solutions for all
the nondominated layers. As shown in Fig. 10 , the distribution curve of nondominated solutions on all problems but WFG4
is consistent with that in Fig. 3 (a). The phenomenon shown in the figure is highly correlated with the results of HV. They
all showed that NSGA −AD is better than other algorithms in DTLZ1 −7 and WFG1 −WFG3, but its performance is slightly
inferior to the compared algorithms when facing the same Pareto front as WFG4.
5.6. Discussions
The impressive results of NSGA −II + AD motivate us to deeply explore the shortcomings of NSGA −II.
It is well known that as the number of objective increases, an increasingly larger fraction of a population be-
comes non −dominated. Since NSGA −II distinguishes between solutions mainly by the Pareto dominance criterion, in
many −objective optimization there are not much room for identifying promising solutions. This slows down the search
process and therefore NSGA −II could become ineffective.
3 In the test instances selected in this paper, DTLZ2,DTLZ3 and DTLZ4 have the same Pareto front, DTLZ5 and DTLZ6 have the same Pareto front, and the
Pareto front of WFG4 −WFG9 are consistent.

396 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
In addition, the crowding distance of NSGA −II does not provide good diversity of solutions in many −objective optimiza-
tion, as the considered crowding distance fails to accurately evaluate the crowding degree of solutions when the number
of the objectives is greater than two. For the case M = 2 , crowding is simply measured as the Manhattan distance between
neighboring solutions p i −1 and p i +1 . For M ≥ 3, however, the analogy does not hold, because objectives are processed inde-
pendently and nearest neighbor solutions may change for each objective.
In this paper, our main work is to alleviate the first difficulty mentioned above by using angle dominance that appropri-
ately expands the solution’s dominance area. For the second difficulty mentioned above, the improvement measures can be
found in [15] .
6. Conclusions
Many −objective optimization brings enormous challenges to the EMO community because the Pareto dominance crite-
rion is ineffective in a high −dimensional space. In this paper, we have proposed an angle dominance approach to deal with
MaOPs. Converting many objectives of a given problem into angle vectors, angle dominance can achieve a good balance
between convergence and extensity.
Systematic experiments have been carried out based on the two test suites (e.g., DTLZ and WFG). From the compara-
tive results, it has been shown that after the implementation of angle dominance, NSGA −II achieves an improvement of
performance with varying dimensions. Moreover, five state −of −the −art MOEAs (i.e., GrEA, PICEAg, MaOEARD, MOEAD and
ε−MOEA) have been used to compare with the angle dominance based NSGA −II (denoted NSGA −II + AD). The experimen-
tal results show that NSGA −II + AD is very competitive against the peer algorithms in terms of providing a good balance
between convergence and diversity.
As a new dominance approach in EMO, angle dominance takes account of convergence and extensity. Angle dominance
divides the population into many smaller sub −populations by comparing angle vectors, where the convergence and extensity
of solutions are kept in the first layers.
Despite the high competitiveness of angle dominance shown in our first attempt, more work is needed to further inves-
tigate its benefits and limitations. Although angle dominance is not sensitive to the parameter, an adaptive technology on
the parameter would be better when addressing varying problems. Taking uniformity into consideration will also be a focus
of our subsequent study.
Acknowledgments
This work was supported in part by the National Key R&D Program of China under Grant 2016YFB020 020 0, the National
Natural Science Foundation of China under Grant 61572177 , the National Outstanding Youth Science Program of National
Natural Science Foundation of China under Grant 61625202 , the Key Program of Natural Science Foundation of China under
Grant 61432005 and the International (Regional) Cooperation and Exchange Program of National Natural Science Foundation
of China under Grant 61661146006 .
Appendix A. Explain why ε −Dominance may eliminate several viable solutions
This appendix provides a detailed description why ε−dominance may eliminate several viable solutions.
In 2002, Laumanns et al. proposed a loosening dominance for MOEAs, called ε−dominance. Subsequently, many
ε−dominance −based algorithms have been proposed, such as ε−NSGA −II [28] and ε−MOEA [9] , etc. This criterion serves as
an archiving strategy to ensure both properties of convergence towards the Pareto −optimal front and properties of diversity
among the solutions found. Since this criterion guarantees that no two archived solutions are within an εi value from each
other in the i −th objective, the ε value is usually provided by the decision maker to control the size of the solution set.
Nevertheless, due to the geometrical characteristics of the Pareto −optimal front are commonly unknown by the decision
maker, the ε−dominance criterion may lose a large number of viable solutions when the ε value is imperfectly estimated.
Another limitation of ε−dominance is the fact that it may lose solutions located on segments of the Pareto front that are
almost horizontal or almost vertical, as well as the extreme points of the Pareto front. This has a negative impact on the
spread of solutions along the Pareto front.
To illustrate the above phenomenon more directly, we referenced the example in [20] .
As shown in Fig. A.11 , the objective space are divided into 400 grids, which means that the objective space can accom-
modate up to 20 points (here the example in [20] , However being borrowed). The ε−dominance only gets up to 12 points
in the space and other 8 points are lost because either the extreme points are easily ε−dominated or the precision of the
grid is insufficient.

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 397
Fig. A.11. Illustration of the limitations of ε−dominance, where the objective space is divided into 400 grids (maximum capacity of 20 points) and the
objective function is x 2 + y 2 = 1 in the figure. This grid allows a maximum of 12 points; the other 8 points are lost because either the extreme points are
easily ε−dominated.).
Appendix B. Explain why cone ε −Dominance can promote both convergence and uniformity
In this appendix, we will analyze in detail why cone ε−dominance can promote both convergence and uniformity. The
cone ε−dominance criterion has been proposed by Batista et al. [4] . Similar to the ε−dominance, the cone ε−dominance
criterion guarantees that no two achieved solutions are within an εi value from each other in the i −th objective. Besides,
if two points share the same grid, the point is only replaced by a dominating one or by another point closest to the origin
of the grid. These characteristics show that the cone ε−dominance can maintain a good distribution and convergence of
the population. Besides, the cone ε−dominance introduces a parameter k to control the dominance area so that the loss of
extreme points of the Pareto front and points located in segments of the Pareto front that are almost horizontal or vertical
can be avoided.
In general, if any connected monotonic front exists between the extreme grids of the hypergrid, then the number of
grids that are touched by this front is maximum. Fig. B.12 (a) and (b) illustrate two possible situations in which the number
of estimated cone ε−Pareto solutions is maximum, i.e., convex Pareto front and concave Pareto front. For both cases, the
number of estimated points is nine (the maximum of non cone ε−dominated points is nine). Fig. B.12 (c) presents a possible
situation in which a disconnected front has been stated. For this case, the maximum size of non cone ε−dominated points
cannot be reached. However, it is likely to estimate one solution from each gird touched by the front. The ε−dominance
criterion, on the other hand, can only achieve the upper bound for the number of points allowed by a grid when the real
Pareto front is linear [20] .
Fig. B.12. Illustration of the characteristic of cone ε−dominance, where the objective space is divided into 25 grids and the optimal Pareto fronts given
are concave, convex and disconnected, respectively. (a) In the concave front, the size of obtained points equals to the maximum non cone ε−dominated
points. (b) In the convex front, It can also get the largest non cone ε−dominated points. (c) In the disconnected front, as the same as (a) and (b), each grid
touched by the front has one point.

398 Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399
References
[1] S.F. Adra , P.J. Fleming , A diversity management operator for evolutionary many–objective optimisation, in: M. Ehrgott, C.M. Fonseca, X. Gandibleux,
J.K. Hao, M. Sevaux (Eds.), Evolutionary Multi–Criterion Optimization, Springer, Berlin, Heidelberg, 2009, pp. 81–94 .
[2] R.B. Agrawal , K. Deb , R. Agrawal , Simulated binary crossover for continuous search space, Complex Syst. 9 (2) (1995) 115–148 . [3] J. Bader , E. Zitzler , Hype: an algorithm for fast hypervolume–based many–objective optimization, Evolut. Comput. 19 (1) (2011) 45–76 .
[4] L.S. Batista , F. Campelo , F.G. Guimarães , J.A. Ramírez , Pareto cone ε–dominance: improving convergence and diversity in multiobjective evolutionaryalgorithms, in: R.H.C. Takahashi, K. Deb, E.F. Wanner, S. Greco (Eds.), Evolutionary Multi–Criterion Optimization, Springer, Berlin, Heidelberg, 2011,
pp. 76–90 . [5] P.J. Bentley , J.P. Wakefield , Finding acceptable solutions in the Pareto–optimal range using multiobjective genetic algorithms, in: P.K. Chawdhry, R. Roy,
R.K. Pant (Eds.), Soft Computing in Engineering Design and Manufacturing, Springer, London, 1998, pp. 231–240 .
[6] H. Chen, R. Cheng, J. Wen, H. Li, J. Weng, Solving large–scale many–objective optimization problems by covariance matrix adaptation evolution strategywith scalable small subpopulations, Inf. Sci. (2018), doi: 10.1016/j.ins.2018.10.007 .
[7] H. Chen, X. Zhu, G. Liu, W. Pedrycz, Uncertainty–aware online scheduling for real–time workflows in cloud service environment, IEEE Trans. Serv.Comput. (2018), doi: 10.1109/TSC.2018.2866421 .
[8] K. Deb , H. Jain , An evolutionary many–objective optimization algorithm using reference–point–based nondominated sorting approach, part i: solvingproblems with box constraints, IEEE Trans. Evolut. Comput. 18 (4) (2014) 577–601 .
[9] K. Deb , M. Mohan , S. Mishra , Evaluating the ?–domination based multi–objective evolutionary algorithm for a quick computation of Pareto–optimal
solutions, Evolut. Comput. 13 (4) (2005) 501–525 . [10] K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multiobjective genetic algorithm: Nsga–ii, Trans. Evolut. Comp 6 (2) (2002) 182–197,
doi: 10.1109/4235.996017 . [11] K. Deb, L. Thiele, M. Laumanns, E. Zitzler, Scalable Test Problems for Evolutionary Multiobjective Optimization, Springer, London, pp. 105–145. doi: 10.
1007/1- 84628- 137- 7- 6 . [12] R. Denysiuk, A. Gaspar–Cunha, Multiobjective evolutionary algorithm based on vector angle neighborhood, Swarm Evolut. Comput. 37 (2017) 45–57,
doi: 10.1016/j.swevo.2017.05.005 . [13] N. Drechsler , R. Drechsler , B. Becker , Multi–objective optimisation based on relation favour, in: Proceedings of the First International Conference on
Evolutionary Multi–Criterion Optimization, in: EMO ’01, Springer–Verlag, London, UK, 2001, pp. 154–166 .
[14] M. Farina , P. Amato , On the optimal solution definition for many–criteria optimization problems, in: 2002 Annual Meeting of the North AmericanFuzzy Information Processing Society Proceedings. NAFIPS–FLINT 2002 (Cat. No. 02TH8622), 2002, pp. 233–238 .
[15] F.–A. Fortin, M. Parizeau, Revisiting the Nsga–ii crowding–distance computation, in: Proceedings of the 15th Annual Conference on Genetic and Evo-lutionary Computation, in: GECCO ’13, ACM, New York, NY, USA, 2013, pp. 623–630, doi: 10.1145/2463372.2463456 .
[16] G. Wu, X. Shen, H. Li, H. Chen, A. Line, P. Suganthan, Ensemble of differential evolution variants, Inf. Sci. 423 (2018) 172–186, doi: 10.1016/j.ins.2017.09.053 .
[17] D. Hadka, P.M. Reed, T.W. Simpson, Diagnostic assessment of the borg moea for many–objective product family design problems, in: 2012 IEEE
Congress on Evolutionary Computation, 2012, pp. 1–10, doi: 10.1109/CEC.2012.6256466 . [18] Z. He , G.G. Yen , Many–objective evolutionary algorithm: objective space reduction and diversity improvement, IEEE Trans. Evolut. Comput. 20 (1)
(2016) 145–160 . [19] Z. He, G.G. Yen, Many–objective evolutionary algorithms based on coordinated selection strategy, IEEE Trans. Evolut. Comput. 21 (2) (2017) 220–233,
doi: 10.1109/TEVC.2016.2598687 . [20] A.G. Hernandez–D’iaz , L.V. Santana–Quintero , C.A. Coello Coello , J. Molina , Pareto–adaptive ε–dominance, Evolut. Comput. 15 (4) (2007) 493–517 .
[21] S. Huband , P. Hingston , L. Barone , L. While , A review of multiobjective test problems and a scalable test problem toolkit, IEEE Trans. Evolut. Comput.
10 (5) (2006) 477–506 . [22] E.J. Hughes, Multiple single objective Pareto sampling, in: The 2003 Congress on Evolutionary Computation, 2003. CEC ’03., 4, 2003, pp. 2678–2684,
doi: 10.1109/CEC.2003.1299427 . [23] K. Ikeda, H. Kita, S. Kobayashi, Failure of pareto–based moeas: does non–dominated really mean near to optimal? in: Proceedings of the 2001 Congress
on Evolutionary Computation (IEEE Cat. No.01TH8546), 2, 2001, pp. 957–962, doi: 10.1109/CEC.2001.934293 . [24] H. Ishibuchi, N. Tsukamoto, Y. Nojima, Evolutionary many–objective optimization, in: 2008 3rd International Workshop on Genetic and Evolving Sys-
tems, 2008, pp. 47–52, doi: 10.1109/GEFS.2008.4484566 .
[25] Y. Hitotsuyanagi , N. Tsukamoto , H. Ishibuchi , H. Ishibuchi , Y. Nojima , Many–objective test problems to visually examine the behavior of multiobjectiveevolution in a decision space, in: R. Schaefer, C. Cotta, J. Kolodziej, G. Rudolph (Eds.), Parallel Problem Solving from Nature, PPSN XI, Springer, Berlin,
Heidelberg, 2010, pp. 91–100 . [26] S. Jiang, S. Yang, A strength Pareto evolutionary algorithm based on reference direction for multiobjective and many–objective optimization, IEEE Trans.
Evolut. Comput. 21 (3) (2017) 329–346, doi: 10.1109/TEVC.2016.2592479 . [27] J. Knowles , D. Corne , Properties of an adaptive archiving algorithm for storing nondominated vectors, IEEE Trans. Evolut. Comput. 7 (2) (2003) 100–116 .
[28] J.B. Kollat , P.M. Reed , Comparison of multi–objective evolutionary algorithms for long–term monitoring design, in: Impacts of Global Climate Change,
2005, pp. 1–11 . [29] M. Jeon , S. Soak , K. Kim , H. Park , M. Jeon , Statistical properties analysis of real world tournament selection in genetic algorithms, Appl. Intell. 28 (2)
(2008) 195–205 . [30] H. Lei, R. Wang, T. Zhang, Y. Liu, Y. Zha, A multi–objective co–evolutionary algorithm for energy–efficient scheduling on a green data center, Comput.
Oper. Res. 75 (C) (2016) 103–117, doi: 10.1016/j.cor.2016.05.014 . [31] K. Li, R. Wang, T. Zhang, H. Ishibuchi, Evolutionary many–objective optimization: a comparative study of the state–of–the–art, IEEE Access 6 (2018)
26194–26214, doi: 10.1109/ACCESS.2018.2832181 .
[32] M. Li, C. Grosan, S. Yang, X. Liu, X. Yao, Multiline distance minimization: a visualized many–objective test problem suite, IEEE Trans. Evolut. Comput.22 (1) (2018) 61–78, doi: 10.1109/TEVC.2017.2655451 .
[33] M. Li, S. Yang, X. Liu, Shift–based density estimation for Pareto–based algorithms in many–objective optimization, IEEE Trans. Evolut. Comput. 18 (3)(2014) 348–365, doi: 10.1109/TEVC.2013.2262178 .
[34] M. Li, L. Zhen, X. Yao, How to read many–objective solution sets in parallel coordinates [educational forum], IEEE Comput. Intell. Mag. 12 (4) (2017)88–100, doi: 10.1109/MCI.2017.2742869 .
[35] P. Wang, W. Zhu, L. Cai, S. Ren, M. Chen, Z. Li, B. Liao, K. Li, Adaptive region adjustment to improve the balance of convergence and diversity inmoea/d, Appl. Soft Comput. 70 (2018) 797–813, doi: 10.1016/j.asoc.2018.06.023 .
[36] P.M. Reed, D. Hadka, J.D. Herman, J. Kasprzyk, Evolutionary multiobjective optimization in water resources: the past, present, and future, Adv. Water
Resour. 51 (2013) 438–456, doi: 10.1016/j.advwatres.2012.01.005 . 35th Year Anniversary Issue. [37] J.Z. Salazar, P.M. Reed, J.D. Herman, M. Giuliani, A. Castelletti, A diagnostic assessment of evolutionary algorithms for multi–objective surface water
reservoir control, Adv. Water Resour. 92 (2016) 172–185, doi: 10.1016/j.advwatres.2016.04.006 . [38] H. Sato , H.E. Aguirre , K. Tanaka , Controlling dominance area of solutions and its impact on the performance of moeas, in: S. Obayashi, K. Deb, C. Poloni,
T. Hiroyasu, T. Murata (Eds.), Evolutionary Multi–Criterion Optimization, Springer, Berlin, Heidelberg, 2007, pp. 5–20 . [39] R. Wang, R.C. Purshouse, P.J. Fleming, Preference–inspired coevolutionary algorithms for many–objective optimization, IEEE Trans. Evolut. Comput. 17
(4) (2013) 474–494, doi: 10.1109/TEVC.2012.2204264 .

Y. Liu, N. Zhu and K. Li et al. / Information Sciences 509 (2020) 376–399 399
[40] R. Wang, Z. Zhou, H. Ishibuchi, T. Liao, T. Zhang, Localized weighted sum method for many–objective optimization, IEEE Trans. Evolut. Comput. 22 (1)(2018) 3–18, doi: 10.1109/TEVC.2016.2611642 .
[41] L. While, P. Hingston, L. Barone, S. Huband, A faster algorithm for calculating hypervolume, IEEE Trans. Evolut. Comput. 10 (1) (2006) 29–38, doi: 10.1109/TEVC.2005.851275 .
[42] Y. Xiang, Y. Zhou, M. Li, Z. Chen, A vector angle–based evolutionary algorithm for unconstrained many–objective optimization, IEEE Trans. Evolut.Comput. 21 (1) (2017) 131–152, doi: 10.1109/TEVC.2016.2587808 .
[43] Y. Xu, K. Li, J. Hu, K. Li, A genetic algorithm for task scheduling on heterogeneous computing systems using multiple priority queues, Inf. Sci. 270
(2014) 255–287, doi: 10.1016/j.ins.2014.02.122 . [44] S. Yang, M. Li, X. Liu, J. Zheng, A grid–based evolutionary algorithm for many–objective optimization, IEEE Trans. Evolut. Comput. 17 (5) (2013) 721–
736, doi: 10.1109/TEVC.2012.2227145 . [45] Q. Zhang, H. Li, Moea/d: a multiobjective evolutionary algorithm based on decomposition, IEEE Trans. Evolut. Comput. 11 (6) (2007) 712–731, doi: 10.
1109/TEVC.2007.892759 . [46] Q. Zhang, W. Zhu, B. Liao, X. Chen, L. Cai, A modified pbi approach for multi–objective optimization with complex Pareto fronts, Swarm Evolut. Comput.
40 (2018) 216–237, doi: 10.1016/j.swevo.2018.02.001 . [47] X. Zhang , Y. Tian , Y. Jin , A knee point–driven evolutionary algorithm for many–objective optimization, IEEE Trans. Evolut. Comput. 19 (6) (2015)
761–776 .
[48] W. Li, X. Cai, C. Wei, Z. Fan, Y. Fang, E. Goodman, Moea/d with angle–based constrained dominance principle for constrained multi–objective opti-mization problems, Appl. Soft Comput. 74 (2019) 621–633, doi: 10.1016/j.asoc.2018.10.027 .
[49] E. Zitzler , M. Laumanns , L. Thiele , Spea2: improving the strength pareto evolutionary algorithm, in: Evolutionary Methods for Design, Optimisationand Control, 2001, pp. 95–100 .
[50] E. Zitzler, L. Thiele, M. Laumanns, C.M. Fonseca, V.G. da Fonseca, Performance assessment of multiobjective optimizers: an analysis and review, IEEETrans. Evolut. Comput. 7 (2) (2003) 117–132, doi: 10.1109/TEVC.2003.810758 .