Embed Size (px)
Citation preview

AN ALTERNATIVE DECOUPLED SINGLE-INPUT FUZZY SLIDING MODE CONTROL WITH APPLICATIONS
Fang-Ming Yu, Hung-Yuan Chung* and Chen-Ning Huang
Department of Electrical Engineering National Central University, Chungli, Taiwan 320, R.O.C.
E-mail: [email protected] ABSTRACT
A decoupled single-input fuzzy sliding mode control design is proposed. By using this approach, the order of the rule base is reduced greatly. In addition, compared with previous results, five fuzzy rules are given to control a class of fourth-order nonlinear systems. Using this method, the system can achieve asymptotic stability and the evolution of system will be better as well as converge faster than that of previous reports. One simulation studies of a cart-pole system is presented to demonstrate the effectiveness of the method. Furthermore, by using this approach, experimental results are given to assure the robustness and stability of system. KEY WORDS Fuzzy logic control, decoupled, seesaw system 1. INTRODUCTION
It is well known that fuzzy logic controllers (FLC’s) have been proven to be a powerful tool in controlling nonlinear systems since the work of Mamdani [1] was proposed in 1974. The fuzzy control algorithm can be regarded as model-free control algorithms in contrast to a conventional feedback control algorithm. However, some issues still exist in the control of complex systems via fuzzy logic controllers, for example, 1) No general stability analysis tools can be applied to FLC’s. 2) The large amount of fuzzy rules for a high-order system make the analysis complex. 3) The design parameters of membership functions affect the performance of the fuzzy system and suitable membership functions may be obtained through a considerable time-consuming and a trial-and-error procedure. To overcome these formidable tasks, many researchers spend much effort to investigate the above three problems. Nevertheless, the main problem with these approaches is that the number of rules used in the rule base remains quite large.
In recent years, the concept of the fuzzy sliding mode control (FSMC) [2], [3], [4] has been reported. To decrease the number of rules in the rule base, several authors have suggested using a composite state, called a
sliding surface to obtain a fuzzy sliding mode controller described in the previous works. The advantage of such controllers is that the number of rules required is reduced from mn to m2 in Hwang [2], [7] and Bartolini [8] or nm2 in Kung [9]. In these studies, we can find that the FSMC is one of the reducing fuzzy rules methods. Furthermore, in general, since the FSMC combines fuzzy control and sliding mode control principles, the closed-loop system has better performance, with robustness and stability, than that using only one control theory.
Moreover, another objective of designing fuzzy controllers is to apply them to higher order systems. The large majority of fuzzy controllers are limited to systems with predominantly second-order dynamics. As proven in [10], [11], and [12], conventional fuzzy controllers which use the system error and its derivative in the fuzzy rule base are a type of PID control. The action of such fuzzy controllers are equivalent to that of full-state feedback controllers for second-order systems and, hence, these systems can always be stabilized. However, for a fourth-order system, such as the cart-pole system, using a conventional fuzzy controller will result in a large number of rules (m4). For these systems, the intuitive sense is that some rules may not be activated if a stabilizing rule base is determined.
In most studies, the fuzzy controller of second-order systems is designed on a phase plane built by error e and change of error e& that are produced from the states x and x& . For example, in a cart-pole system only the pole subsystem is considered ignoring the cart subsystem and it is thus impossible to achieve a good control around the set point (distance=0). In this study, a decoupled single-input fuzzy sliding mode controller design is proposed. This controller guarantees some properties, such as the robust performance and stability properties. In addition, a class of fourth-order nonlinear systems is investigated. Lo and Kuo [14] proposed a method called “ decoupled fuzzy sliding-mode control” to cope with the above issue. Though Chen, Yu, and Chung proposed another kind of method called “Decoupled Fuzzy Controller Design with Single-Input Fuzzy Logic,” in which convergence is faster than that of [14]. It can’t show out the effectiveness and feasibility of the practical system. Herein, a new approach, with the better evolution performance than [5] and [14] as well as
*Corresponding author 377-057 7

with practical system evolution, is proposed. That is another kind of decoupled and single-input fuzzy sliding mode controller is used to replace the fuzzy controller of [5], [6] and [14]. This approach possesses a sole fuzzy input variable of order m as given in Table 1 and Fig. 2, rather than the controllers which are of order m2 on the phase plane constituted by e and e& or higher order for single-input systems, where m is the number of fuzzification levels. Furthermore, the Lyapunov function is employed to get the fuzzy control output u, and then to assure the system asymptotic stability. Compared with [5] and [14], five fuzzy control rules are used as shown in Table 1. If one needs a finer control, one can easily add or modify the rules by means of the Table 1 and Fig. 2. Using this approach, the system can achieve asymptotic stability and it will converge faster than that of [14] and the system evolution performance is better than that of [5]. Meanwhile, the experimental results are given to show the effectiveness and feasibility of the approach.
The rest of the paper is divided into five sections. In Section 2, the systems are described. In Section 3, the single-input fuzzy sliding mode control is presented. In Section 4, the detail design of the decoupled fuzzy logic controller is proposed. In Section 5, the proposed controller is used to control a cart-pole system. In Section 6, the experimental results are given to show the system robustness and stability by using the approach. Finally, we conclude with Section 7. 2. SYSTEM DESCRIPTION
Consider a second-order nonlinear system as the following state-space model in a canonical form:
)()()()()()(
)()(
1
2
21
txtytdubftx
txtx
=++=
=xx&
&
(1)
where Txx ] ,[ 21=x is the state vector, )(xf and )(xb are nonlinear functions, u is the control input, and )(td is external disturbance. The disturbance is assumed to be bounded as )()( tDtd ≤ .
For this kind of the second order system, many kinds of control methods, such as, fuzzy control, PID control, hierarchical fuzzy control and sliding mode control…etc are utilized. A control law u can be easily designed to make the second order system (1) arrive at our control goal. However, for nonlinear models such as a cart-pole system, the system dynamic representation is generally not in a canonical form exactly. Rather, it has a form shown below:
)()()()()()(
)()()()()()(
22224
43
11112
21
tdubftxtxtx
tdubftxtxtx
++==
++==
xx
xx
&
&
&
&
(2)
where Txx ] x, x, ,[ 4321=x is the state vector, )x(1f , )(2 xf and )(1 xb , )(2 xb are nonlinear functions, 1u , 2u
are the control inputs, and )(1 td , )(2 td are external disturbances. The disturbances are assumed to be bounded as )()( 11 tDtd ≤ , )()( 22 tDtd ≤ . From (2), one can
design 1u and 2u respectively, however, this approach is only utilized to control a subsystem in (2). For example, if the model is a cart-pole system, we only control either the pole or the cart of a system such as (2). Hence, the idea of decoupling is employed to design a controller output u to govern the whole system. 3. SINGLE-INPUT FUZZY SLIDING MODE
CONTROL
In this section, the idea of single-input fuzzy sliding mode control (SIFSMC) approach will be demonstrated. For the second order system (1), a switching line, function of s, is chosen as
211 xxcs += (3) By taking the time derivative of both sides of (3), we can obtain
211 xxcs &&& += dubfxc +++= )()(21 xx (4)
Then, multiplying both sides of the above equation by s gives
sdusbsfxscss +++= )()(21 xx& (5) Here, we assume that 0)( >xb . In (4), it is seen that s& increases as u increases and vice versa. Equations (5) and (4) provides the information that if 0>s , the decreasing u will make s& decrease as to lead ss& decrease, and that if
0<s , the increasing u will make make s& increase as to lead ss& decrease. Now, we choose a Lyapunov function:
2
21 sV = (6)
Then ssV && = (7)
Hence, it is seen that if 0>s , decreasing u will make s& decrease as to cause ss& to decrease so that 0<V& and that if 0<s , increasing u will make s& increase as to cause ss& to decrease so that 0<V& . So we can ensure that the system is asymptotically stable. From the above relation, we can conclude that:
su −∝ (8) Hence, the fuzzy rule table can be established on a one-dimensional space of s as shown in Table 1 instead of a two-dimensional space of x and x& . The control action can be determined by s only. Meanwhile, we can easily add or modify rules for fine control. For implementation, a triangular type membership function is chosen for the aforementioned fuzzy variables, as shown in Fig. 1.
8

Table 1. Rule table for the SIFSMC.
s NB NM ZE PM PB
u PB PM ZE NM NB
N B N M Z E P M P B
-1 1 Fig. 1. Fuzzy variable of triangular type
Remark 1: The rule table can be established on a one-dimensional space like Table 1. It is seen that the total number of rules is greatly reduced compared with conventional FLCs, which depends on a two-dimensional space of x and x& for second order system. In other words, a traditional fuzzy system has four states to be controlled and the range of each state variable is divided into five fuzzy sets. The number of rules forming the knowledge database is 54 = 625. With the present method, only one variable s needs to be fuzzified and only five rules are necessary to establish the knowledge database.
The single-input fuzzy sliding mode control (SIFSMC)
is shown in Fig. 2 where s and u are the input and output of the single-input fuzzy sliding mode control, respectively. The input of the proposed fuzzy controller is s~ , which is a fuzzified variable of s. The output of the fuzzy controller is U , which is the fuzzified variable of u . All the universes of discourse of s~ and U are arranged from –1 to 1. Thus, the range of nonfuzzy variables s and u must be scaled to fit the universe of discourse of fuzzified variable s~ and U with scaling factors K1 and K2, respectively, namely,
)(K~
1 tss ⋅= (9) Utu ⋅= 2K)( (10)
Fuzzy Control Rules
)(tsK1 s~ U K2 u(t)
Fig. 2. The block diagram of the SIFSMC.
4. DESIGN OF DECOUPLED FUZZY LOGIC CONTROLLER
In this section, the idea of the single-input fuzzy sliding
mode control is used in Section 3. In Eq. (2), we first
define one switching line as 2111 )( xzxcs +−= (11)
and another switching line as 4322 xxcs += (12)
The control objective is to drive the system states to the original equilibrium point. The switching line variables 1s and 2s are reduced to zeros gradually at the same time by an intermediate variable z . In equation (11), z is a value transferred from 2s , it has a value proportional to 2s and has the range proper to 1x . Equation (11) denotes that the control objective of 1u is changed from 01 =x , 02 =x to zx =1 , 02 =x . Because the controller 1uu = is used to govern the whole system, the bound of 1x can be guaranteed by letting
10 , <<≤ uu Z Zz (13) where uZ is the upper bound of )(zabs . Equation (13) implies that the maximum absolute value of 1x will be limited. Summarizing what we have mentioned above, z can be defined as
10 ,)/( tanh 2 <<⋅Φ= uuz ZZsz (14) where zΦ is the boundary layer of 2s to smooth z , zΦ transfers 2s to the proper range of 1x . Notice that z is a decaying oscillation signal because uZ is a factor less than one. Remark2. Consider equation (11). If s1 = 0, then zx =1 ,
02 =x . Since z is a value transferred from s2, when .0 and 0z then ,0 12 →→→ xs From equation (12), if the
condition 01 →s , the control objective can be achieved. The two-level decoupled SIFSMC is proposed and is shown in Fig. 3.
s2
SMC
s1
SMCSIFSMC Plant
x1
x4
x2
x3 Z
_
u
Fig. 3. The block diagram of the decoupled SIFSMC.
5. COMPUTER SIMULATIONS
In this section, we shall demonstrate that the decoupled SIFSMC is applicable to the cart-pole system [5, 14] and the practical seesaw system [13] to verify the theoretical
9

development.
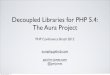
Inverted Pendulum The structure of an inverted pendulum is illustrated in
Fig.4 and its dynamic is described below:
duxmm
xmm
xxgmxLxmx
xx
dxmmL
uxxxxLmxgmx
xx
pt
pt
pp
pt
pt
+−⋅
+
−
+=
=
+−⋅
⋅+−=
=
)cos34(3
4
cos34
cossinsin34
)cos34(
coscossinsin
12
12
11122
4
43
12
122111
2
21
&
&
&
&
(15)
where θ=1x the angle of the pole with respect to the
vertical axis; θ&=2x the angle velocity of the pole with respect
to the vertical axis; xx =3 the position of the cart; xx &=4 the velocity of the cart;
pct mmm +=
θ
x
u
Fig. 4. Structure of an inverted pendulum system.
In what follows, we define the following variables:
21111 )()( xzxczcs +−=+−= θθ & (16)
43222 xxcxxcs +=+= & (17) and
10 ,)/( tanh 2 <<⋅Φ= uuz ZZsz (18) In the simulation, the following specifications are used:
40K 1,K ,0873.0 ,9425.0 ,15,5.0
,5 ,/8.9 ,5.0 ,1 ,05.0
21
212
==≤==Φ=
=====
dZ
ccsmgmLkgmkgm
uz
cp
and initial values are
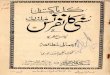
0x ,0 ,0 ,60 ===−= &&o xθθ Fig. 5 – 7 shows the simulation result of our proposed
method and Ref. [5]. It is found that the pole and the cart can be stabilized to the equilibrium point. Nevertheless, in these Figures, we can find that our proposed method have better performances than that of [5] and [14]. Under the same initial conditions, our methods have smaller angle variation of the pole, smaller position variation of the car and smaller control output variation.
Fig. 5. Angle evolution of the pole.
Fig. 6. Position evolution of the cart.
Fig. 7. Control output of Simulation.
10

6. SEESAW SYSTEM EXPERIMENTAL RESULTS
A. System Model Physical Concept
According to the basic physical concept, if the unstable system of seesaw mechanism, the vertical line along the center of gravity of the inverted wedge is not passing through the fulcrum perpendicularly, the inverted wedge will result in a torque and rotating until reaching the stable state. If we want to balance the inverted wedge, we have to put an external force to produce an appropriate opposite torque. For this reason, we equip the inverted wedge with a cart to balance the unstable system. The equipment can move the cart to produce the appropriate torque against the internal force.
Dynamical Equation
The balancing mechanism of the seesaw is shown in Fig. 8 [13]. From the principle of the balance of force and the balance of torque, the dynamical equation can be represented as
xmxBmgu &&& =−+ θsin ,
( ) ( ) ( ) θθµφθθ &&& IurrxmgrMg =−++⋅++⋅ 12
12
2 sinsin (19)
where I is the inertia of the wedge which is given below.
+=
22421 2baabcI ρ
(20) The parameters of the dynamical equation are denoted as in Table 2.
x
uB
µ
1r
2r
θ
φmM
Fig. 8. The balancing mechanism of the inverted wedge. Table 2. The involved parameters of the dynamical equation. m The mass of cart r1 The height of wedge M The mass of wedge r2
The height of center of mass of wedge
I The inertia of wedge µ The damping coefficient of the angle
x Distance of the cart from the origin B The damping coefficient
of the cart
θ The angle of inclination of the wedge ϕ
The angle that the cartmakes with the vertical line of the wedge
In what follows, we define θ=1x , θ&=2x , xx =3 ,
xx &=4 and
21111 )()( xzxczcs +−=+−= θθ & (21)
43222 xxcxxcs +=+= & (22) with
10 ,)/( tanh 2 <<⋅Φ= uuz ZZsz . (23) In the experiment, the following specifications are used:
40.K1,K ,0873.0 ,9425.0 ,15 ,5.0 ,5
21
21
==
≤==Φ== dZcc uz
Hardware Description
The seesaw consists of a DC Servo Motor, a potentiometer for measuring the seesaw angle, a potentiometer for measuring the cart position, an inverted wedge made of plastic board, a high performance data acquisition card, PCL-818H, and a 32-bit personal computer (Pentium-133) as a pc-based controller. The Fig. 9 is the practical hardware structure of the seesaw system.
Fig. 9. The practical hardware structure of the seesaw system.
Software Description
In this study, we use the software, Borland® C++ Builder (BCB), to design all controllers and to apply the hardware. The reasons why we use this software are given below: 1. It offers the timer component. The timer component
can offer the fix time. Then, we can set the trigger time in the millisecond by counting the CPU time and the sampling value in the fixed sampling time.
2. All designs are under the windows, since the windows operation has become a trend in future application. Using the windows operation is helpful for an engineer and for those who are not an engineer to operate.
3. We can revise the parameters of the controller, and control the hardware real time. We can use the image component or other component to draw the response of the controller in real time. Under the windows, it is easily seen whether the design is satisfactory or not.
11

B. Results
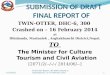
Based on what we want to balance the angle of inverted wedge and the position of cart, we can give the proper commands for balancing control in different situations, and thus construct the controller of the system. The experimental results for decoupled SIFSMC are shown in Fig. 10, and with the external disturbance shown in Fig 11.
In the results of experiment, it is found that once the states reach the equilibrium point, the system is staying in robust condition even under the circumstance of adding external disturbance. Figs. 10-11 show that θ and x converge to zero with or without external disturbance, respectively. In a word, the present method of decoupled SIFSMC possesses the advantages of rule reduction, robustness and chattering elimination, as well as without the exact mathematical model.
Remark 3: For the practical seesaw system, due to the fact that the initial states is hard to set the same. Hence, the reasonable initial angle and the position taken are as shown in Figs 10-11.
(a)
(b)
(c)
Fig. 10. The evolution of the practical seesaw system for decoupled SIFSMC: (a) position, (b) angle, and (c) control output.
(a)
(b)
(c)
Fig. 11. The position evolution of the practical seesaw system with disturbance for decoupled SIFSMC: (a) position, (b) angle, and (c) control output. 7. CONCLUSIONS
The present approach was used to replace the fuzzy controller of Lo’s approach. Compared with previous results, only five fuzzy control rules are needed as given in Table 1. For a finer control, we can easily add or modify rules by way of the rule table for a single-input fuzzy logic control of variable s. Next, simulation result show that the pole and the cart can be stabilized to the equilibrium, and the performance is better than that of [5] and [14]. Also, the experimental results of seesaw system show the performances of robustness even under the circumstance of reasonable external disturbance. Although the decoupled SIFSMC can be extended to an n-th order system, the decoupled method only satisfies the fourth-order system
12

like the cart-pole system. Hence, the same weak point of the approach is that when applied to systems higher than fourth order such as a double-inverted pendulum system (which needs a three-level-control), if the cart is to be stabilized at the origin as in [14], then the method described here will fail. If there exists a new SMC method, which can deal with a higher order system larger than the fourth-order and the higher order system being not a canonical form, then the decoupled SIFSMC may be combined with each other. This may be an important and interesting topic in future.
8. ACKNOWLEDGEMENT
The authors wish to thank the financial support of the National Science Council of the Republic of Taiwan under Contract NSC-91-2213-E-008-023.
REFERENCES [1] E.H. Mamdani, “ Applications of fuzzy algorithms
for simple dynamic plants,” Proc. IEE 121 1974, pp. 1585-1588.
[2] Guang-Chyan Hwang, Shih-Chang Lin, “ A stability approach to fuzzy control design for nonlinear systems,” Fuzzy Sets and Systems vol. 48 1992, pp. 279-287.
[3] Sung-Woo Kim, Ju-Jang Lee, “ Design of a fuzzy controller with fuzzy sliding surface,” Fuzzy Sets and Systems vol.71 1995, pp. 359-367.
[4] Jacob S. Glower, Jeffrey Munighan, “ Design Fuzzy Controllers from a Variable Structures Standpoint,” IEEE Transactions on Fuzzy Systems, vol. 5. No. 1. February 1997, pp. 138-144.
[5] S. Y. Chen, F. M. Yu and H. Y. Chung, “Decoupled Fuzzy Controller Design with Single-Input Fuzzy Logic,” Fuzzy Sets and Systems vol. 129, 2002, pp. 335-342.
[6] Byung-Jae Choi, Seong-Woo Kwak, Byung Kook Kim, “ Design of a single-input fuzzy logic controller and its properties,” Fuzzy Sets and Systems vol. 106 1999, pp.299-308.
[7] Y. R. Hwang and M. Tomizuka, “ Fuzzy smoothing algorithms for variable structure systems,” IEEE Trans. Fuzzy Syst., vol. 2, pp. 277-284, Nov. 1994.
[8] G. Bartolini and A. Ferrara, “ Multivariable fuzzy sliding mode control by using a simplex of control vectors,” in Fuzzy reasoning in Information, Decision, and Control Systems, S. G. Tzafestas and A. N. Venetsanopoulos, Eds. Amsterdam, The Netherlands: Kluwer, 1994, pp. 307-328.
[9] C. C. Kung and S. C. Lin, ” Fuzzy controller design: A sliding mode approach,” in Fuzzy Reasoning in Information, Decision, and Control Systems, S. G. Tzafestas and A. N. Venetsanopoulos, Eds. Amsterdam, The Netherlands: Kluwer, 1994, pp. 277-306.
[10] C. L. Chen, P. C. Chen, and C. K. Chen, “ Analysis and design of fuzzy control system,” Fuzzy Sets Syst. vol. 57, no. 2, pp. 125-140, July 1993.
[11] K. Liu and F. L. Lewis, “ Some issues about fuzzy control,” in proc. IEEE Conf. Decision Contr., San Antonio, TX, Dec. 1993, vol. 2, pp. 1743-1748.
[12] S. Galicher and L. Foulloy, “ Fuzzy controllers: Synthesis equivalence,” IEEE Trans. Fuzzy Syst., vol. 3, pp. 140-148, May 1995.
[13] M. L. Lee, H. Y. Chung, “Hierarchical Fuzzy Control with Applications to Seesaw Systems,” M. S. thesis, Department of Electrical Engineering, National Central University, 2000.
[14] Ji-Chang Lo, Ya-Hui Kuo, “ Decoupled Fuzzy Sliding-Mode Control,” IEEE Transactions on Fuzzy Systems, vol. 6. No. 3. August 1998, pp. 426-435.
13