Embed Size (px)
Citation preview
Cybernet Systems Corporation 1
Amplifying Human Performance Through Advanced Technology
Team Cybernet • The Only Michigan Centric Team
that Qualified for the Finals • Over 10 Km segments traveled
through obstacles, intersections, GPS denied areas, and among moving and still vehicles
• Integrated Urban and Terrain Planning & Behavior Technology validated
• Strap-down kit Qty 1 cost of goods < $20,000 per vehicle
• JAUS compliant architecture proves out
Cybernet Systems Corporation 2
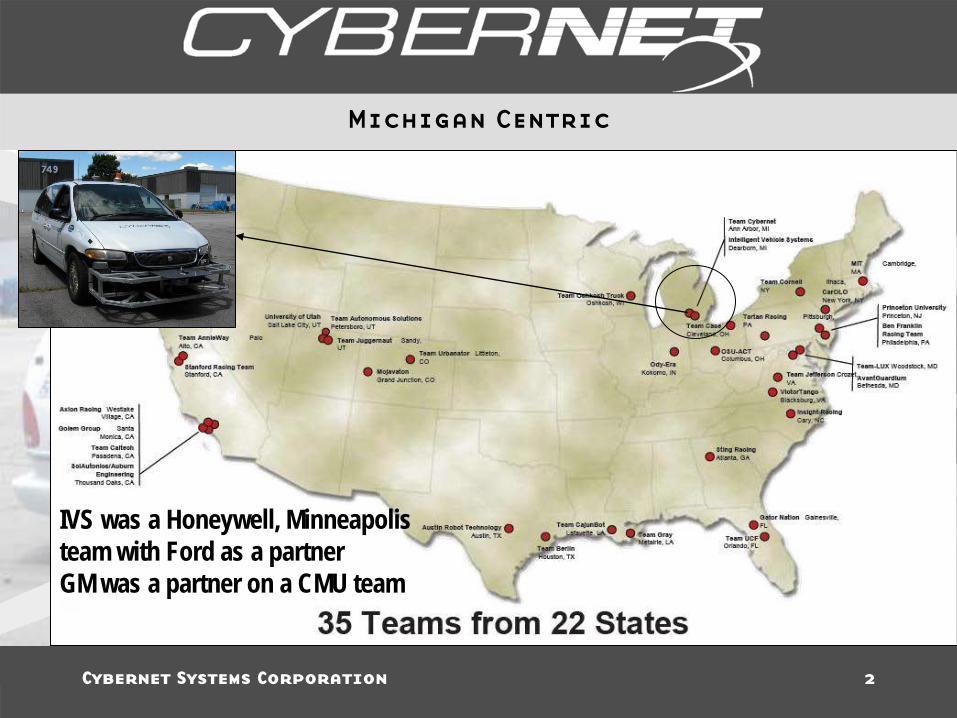
Michigan Centric
IVS was a Honeywell, Minneapolis team with Ford as a partner GM was a partner on a CMU team

Cybernet Systems Corporation 3
Partners and Sponsors
Team Cybernet thanks the organizations that helped us, including:
Cybernet Systems Corporation 4
Other Results
• Nav with GPS denied to GPS CEP (+/-10cm) for over 1 km – 0.02% distance traveled < $10,000 in parts
• A ladar obstacle detection system that detects people or vehicles at relevant ranges reliably
• Novel computer vision/motion-change range detection demonstrated
• Lane departure system that is at 97%-99% reliability • 75 Hz Ladar processing • 30 Hz (8 camera) JPEG-based video processing using an
off-the-shelf security architecture • Relationship with IBEO for Lux Ladar – in automotive
quantities ~$400 per unit; self calibrating; 200m range; tolerant of obscurants, dirt, environmental
• New CAN control architecture under development
Cybernet Systems Corporation 5
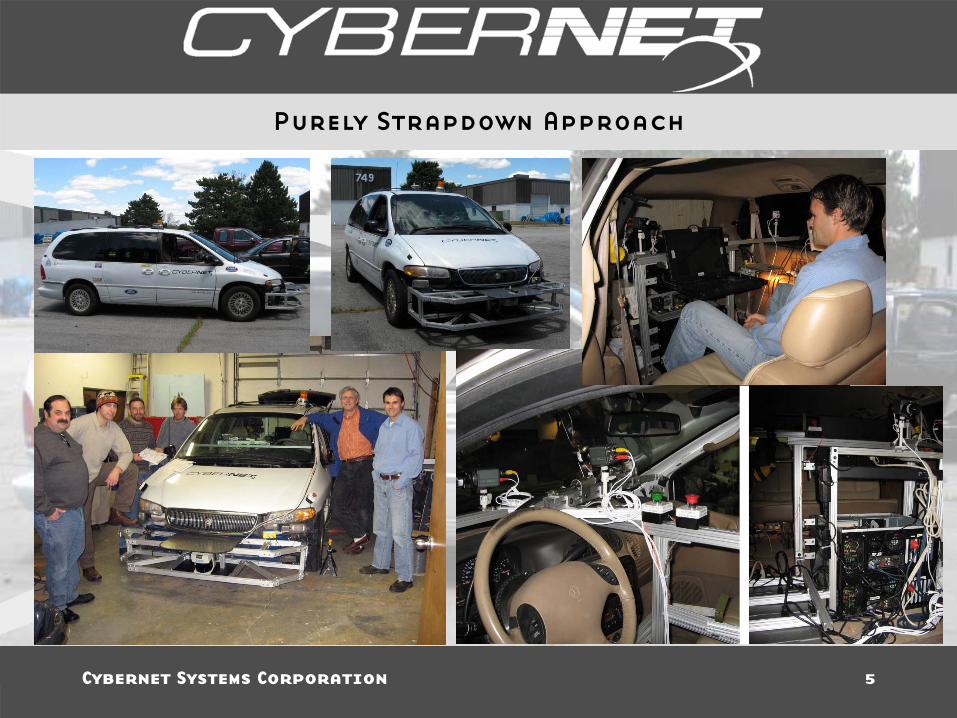
Purely Strapdown Approach
Cybernet Systems Corporation 6
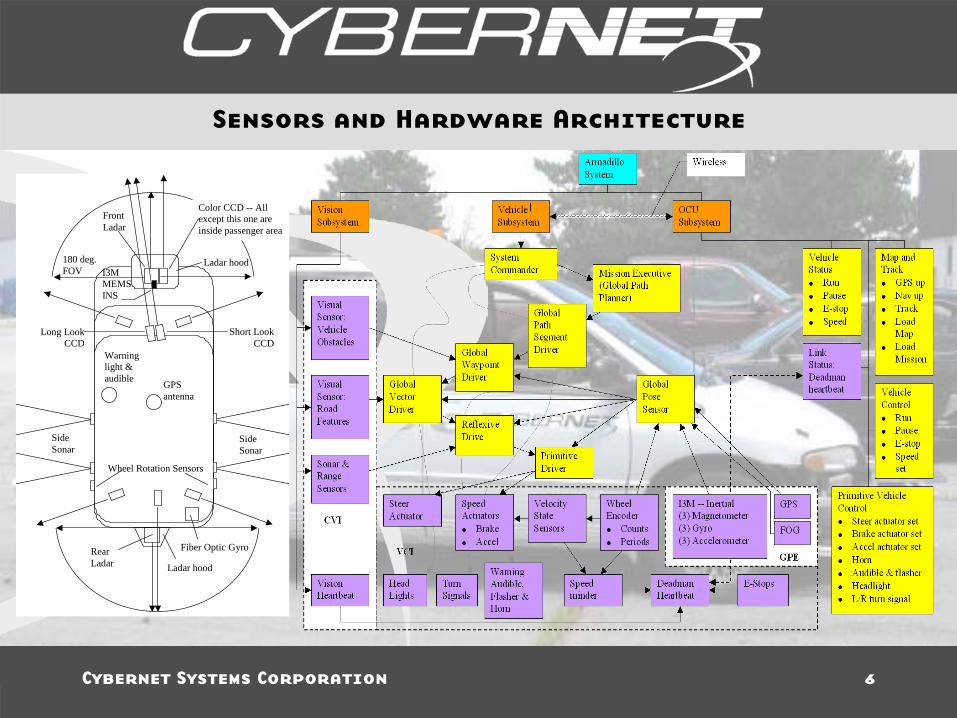
Sensors and Hardware Architecture
180 deg. FOV
Front Ladar
Ladar hood
Color CCD -- All except this one are inside passenger area
Warning light & audible GPS
antenna
I3M MEMS INS
Long Look CCD
Rear Ladar Ladar hood
Fiber Optic Gyro
Side Sonar
Side Sonar
Wheel Rotation Sensors
Short Look CCD
Cybernet Systems Corporation 7
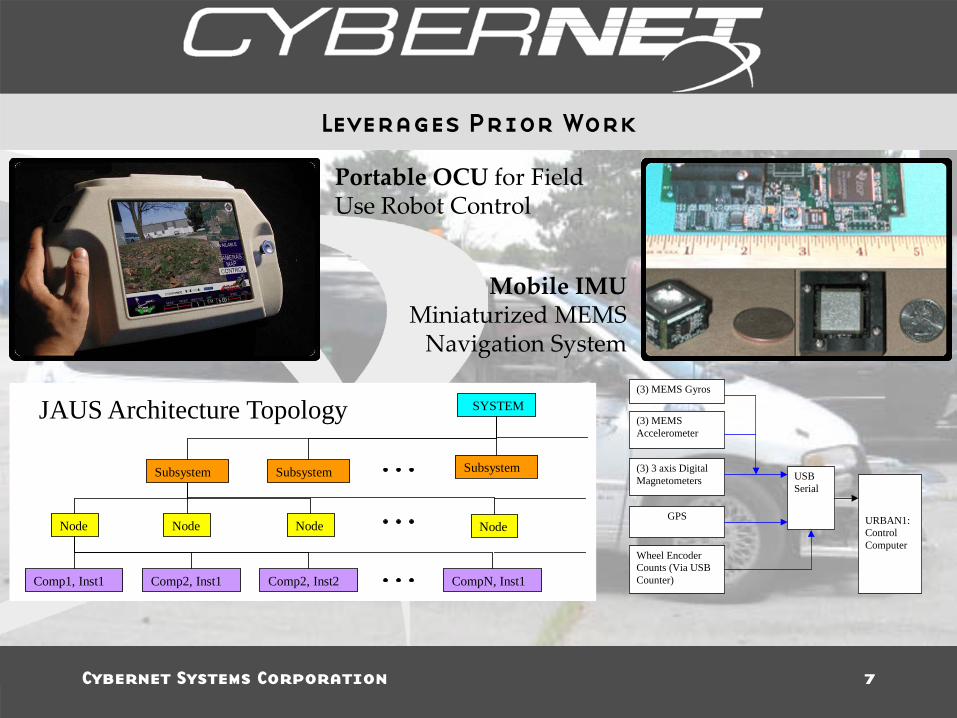
Leverages Prior Work
Portable OCU for Field Use Robot Control
Mobile IMU
Miniaturized MEMS Navigation System
(3) MEMS Gyros
(3) MEMS Accelerometer
(3) 3 axis Digital Magnetometers
Wheel Encoder Counts (Via USB Counter)
GPS
URBAN1: Control Computer
USB Serial
SYSTEM
Subsystem Subsystem Subsystem
Node Node Node Node
Comp1, Inst1 Comp2, Inst1 Comp2, Inst2 CompN, Inst1
JAUS Architecture Topology
Cybernet Systems Corporation 8
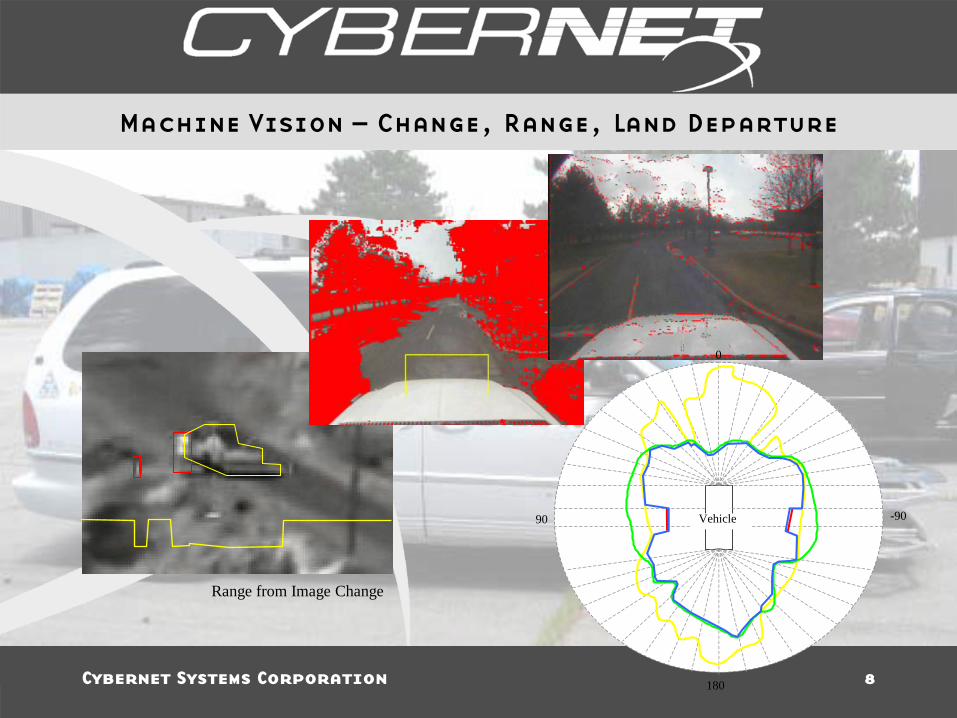
Machine Vision – Change, Range, Land Departure
0
90
180
-90 Vehicle
Range from Image Change
Cybernet Systems Corporation 9
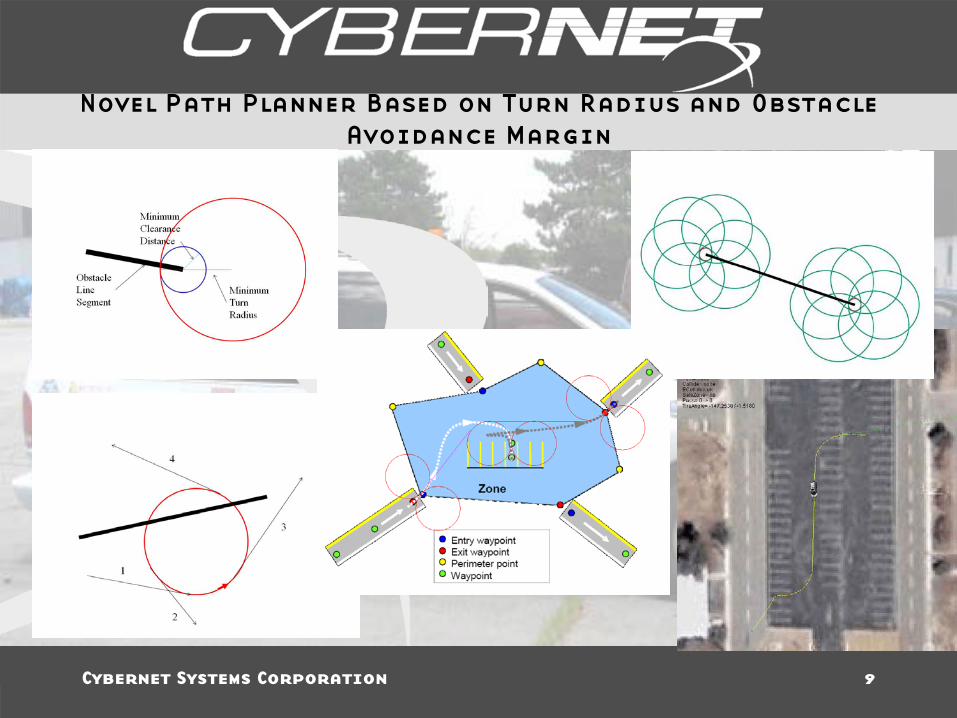
Novel Path Planner Based on Turn Radius and Obstacle Avoidance Margin
Cybernet Systems Corporation 10
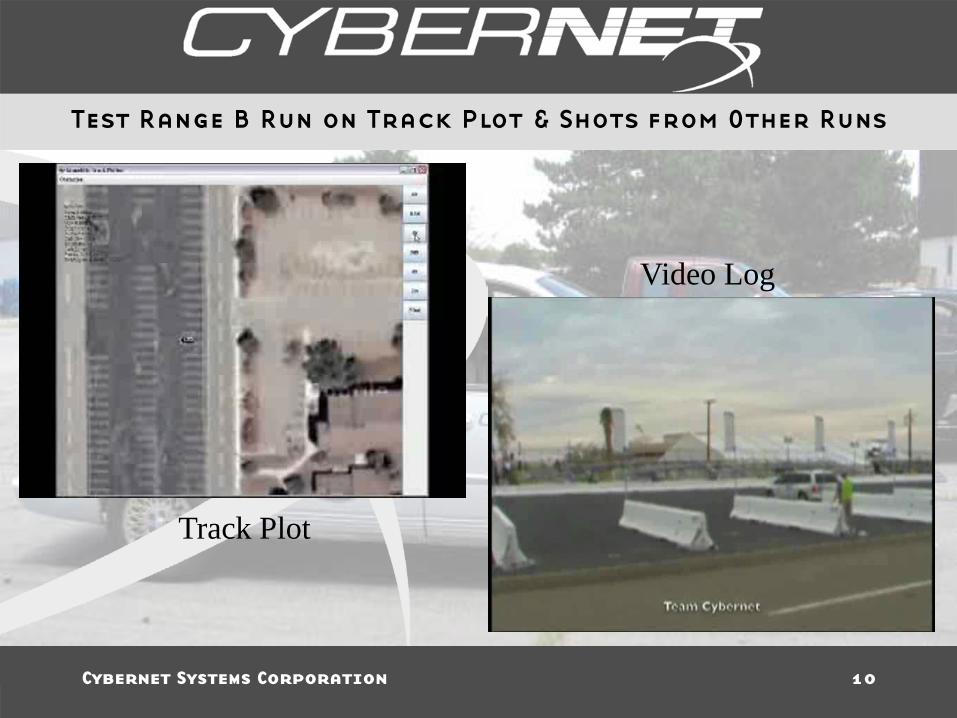
Test Range B Run on Track Plot & Shots from Other Runs
Track Plot
Video Log

Cybernet Systems Corporation 11
Automotive LADAR
3D ERIM Ladar
Cybernet Engineers
ERIM LADAR for DARPA ALV & Navlab
IBEO LUX Distributed by Cybernet
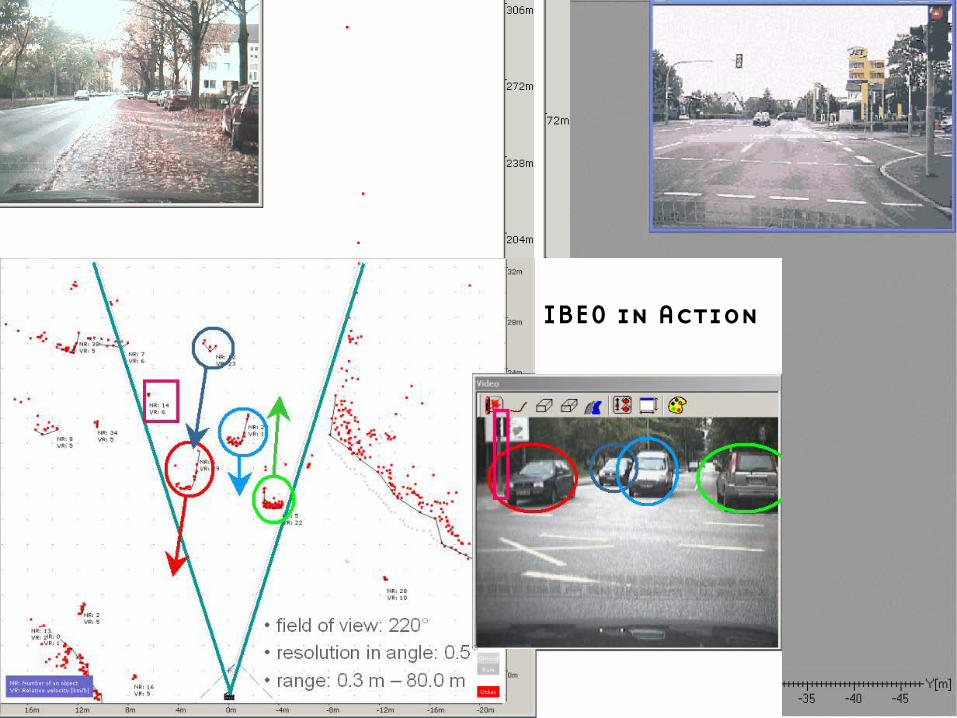
• Automotive Temp. & Environmental Qualified • Scan Frequency: 25 Hz • Horizontal Angle: 100 Degree • Range: 0.3 to 200m (support up to 80mph) • Vertical FOV: 12.6 degree (four scans @3.2º) • Up to three returns per range measure (automatic
detection of optical and rain obscuration) • Size/Weight: 3.3’ x 6’ x 3.3’/2 lbs • Built-in ground and obstacle detection • Class 1 eye safe • Ethernet or CAN bus interfaces • R&D Pricing: €9k; Automotive pricing: €400
Cybernet Systems Corporation 12
IBEO in Action
Cybernet Systems Corporation 13
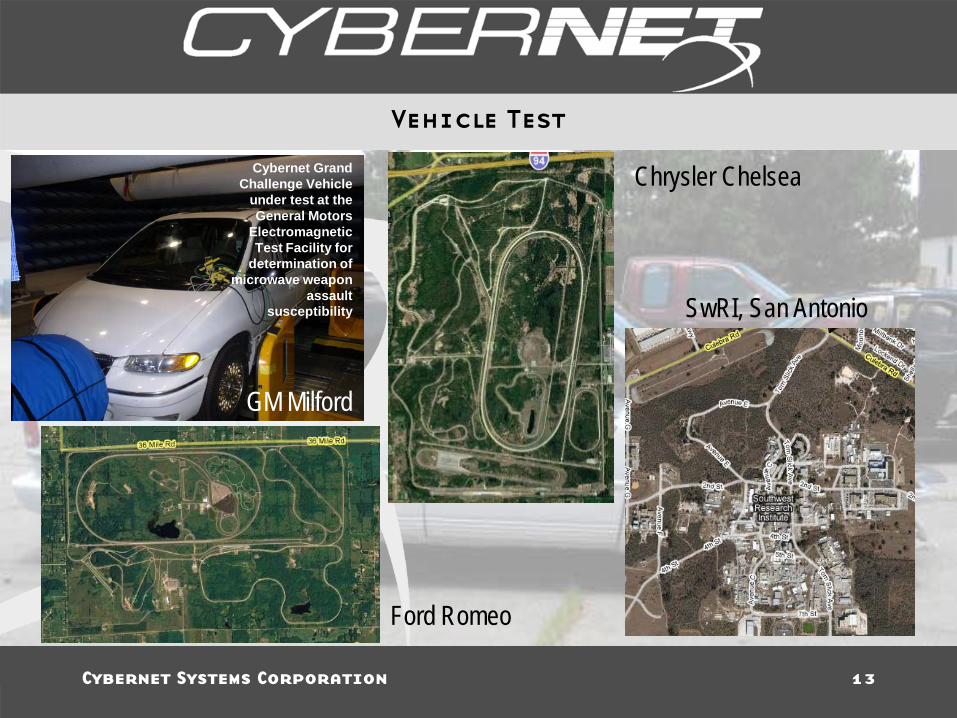
Vehicle Test
Cybernet Grand Challenge Vehicle
under test at the General Motors
Electromagnetic Test Facility for
determination of microwave weapon
assault susceptibility
GM Milford
Ford Romeo
Chrysler Chelsea
SwRI, San Antonio
Cybernet Systems Corporation 14
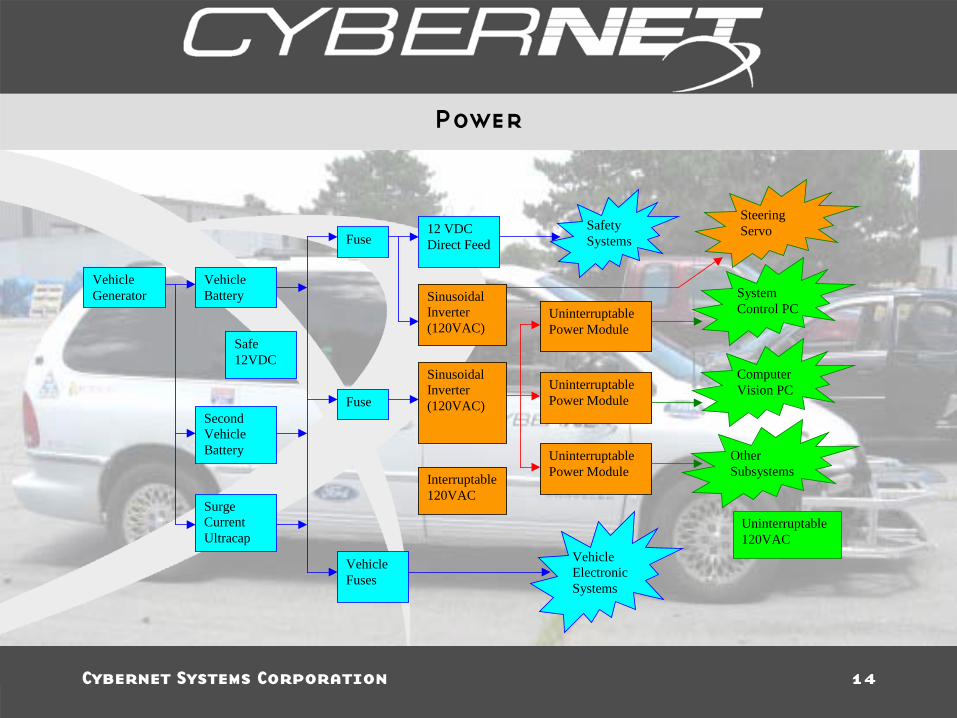
Power
Vehicle Battery
Vehicle Generator
12 VDC Direct Feed
Fuse
Fuse
Sinusoidal Inverter (120VAC)
Uninterruptable Power Module
Uninterruptable Power Module
Uninterruptable Power Module
Vehicle ElectronicSystems
Safety Systems
System Control PC
Computer Vision PC
Other Subsystems
Vehicle Fuses
Safe 12VDC
Interruptable 120VAC
Uninterruptable 120VAC
Second Vehicle Battery
Surge Current Ultracap
Sinusoidal Inverter (120VAC)
Steering Servo
Cybernet Systems Corporation 15
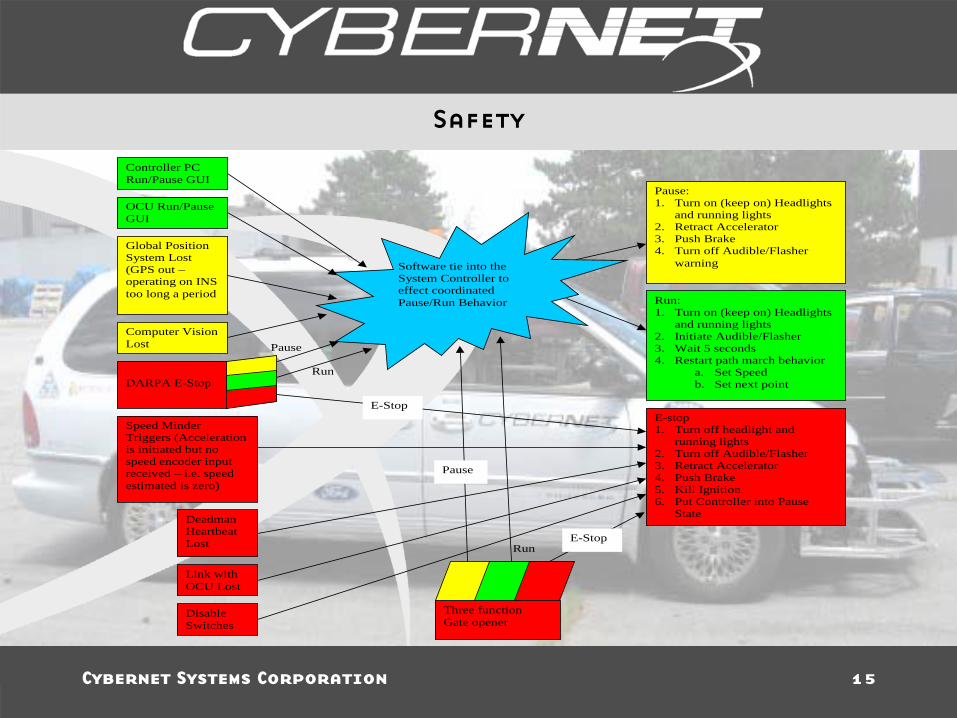
Safety
Software tie into the System Controller to effect coordinated Pause/Run Behavior
Pause: 1. Turn on (keep on) Headlights
and running lights 2. Retract Accelerator 3. Push Brake 4. Turn off Audible/Flasher
warning
Run: 1. Turn on (keep on) Headlights
and running lights 2. Initiate Audible/Flasher 3. Wait 5 seconds 4. Restart path march behavior
a. Set Speed b. Set next point
E-stop 1. Turn off headlight and
running lights 2. Turn off Audible/Flasher 3. Retract Accelerator 4. Push Brake 5. Kill Ignition 6. Put Controller into Pause
State
Disable Switches
Deadman Heartbeat Lost
Link with OCU Lost
Computer Vision Lost
Global Position System Lost (GPS out – operating on INS too long a period
Speed Minder Triggers (Acceleration is initiated but no speed encoder input received – i.e. speed estimated is zero)
DARPA E-Stop
E-Stop
Pause
OCU Run/Pause GUI
Controller PC Run/Pause GUI
Three function Gate opener
Run
E-Stop Run
Pause
Cybernet Systems Corporation 16
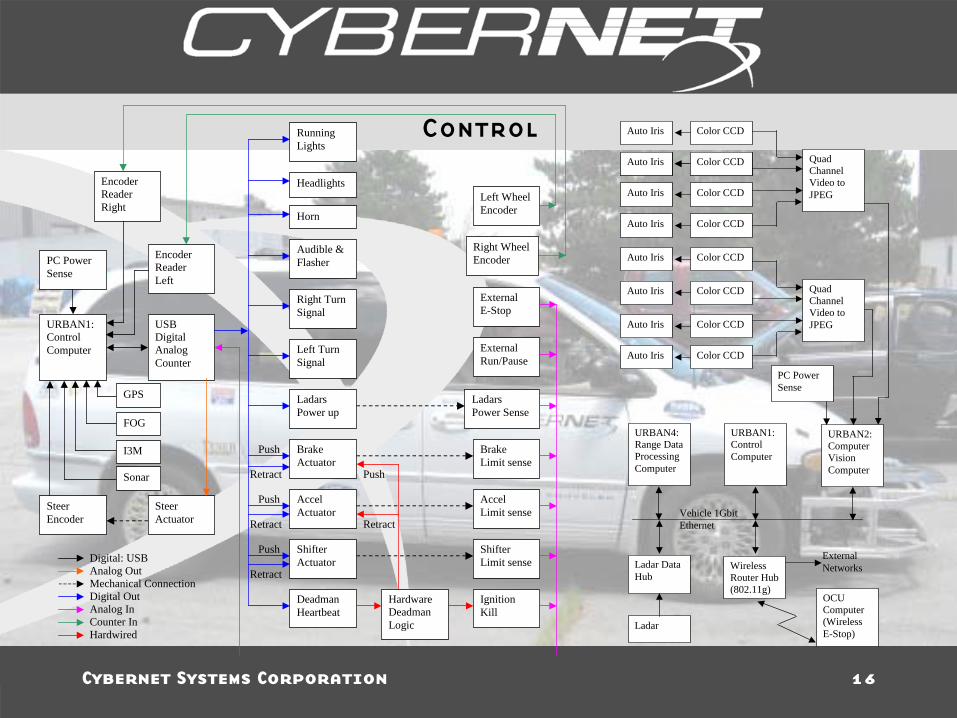
Control
URBAN1: Control Computer
USB Digital Analog Counter
Headlights
Running Lights
Left Turn Signal
Right Turn Signal
Audible & Flasher
Brake Actuator
Brake Limit sense
Accel Actuator
Accel Limit sense
Shifter Actuator
Shifter Limit sense
Steer Actuator
Steer Encoder
Left Wheel Encoder
Right Wheel Encoder
Ladars Power up
Ladars Power Sense
Horn
PC Power Sense
External Run/Pause
External E-Stop
Deadman Heartbeat
Hardware Deadman Logic
Ignition Kill
Push
Retract
Digital: USB Analog Out Mechanical Connection Digital Out Analog In Counter In Hardwired
Push
Push
Push
Retract
Retract
Retract
Encoder Reader Left
Encoder Reader Right
GPS
FOG
I3M
Sonar
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Color CCD Auto Iris
Quad Channel Video to JPEG
Quad Channel Video to JPEG
URBAN2: Computer Vision Computer
PC Power Sense
URBAN1: Control Computer
Ladar Data Hub
Ladar
Wireless Router Hub (802.11g)
OCU Computer (Wireless E-Stop)
Vehicle 1Gbit Ethernet
External Networks
URBAN4: Range Data Processing Computer
Cybernet Systems Corporation 17
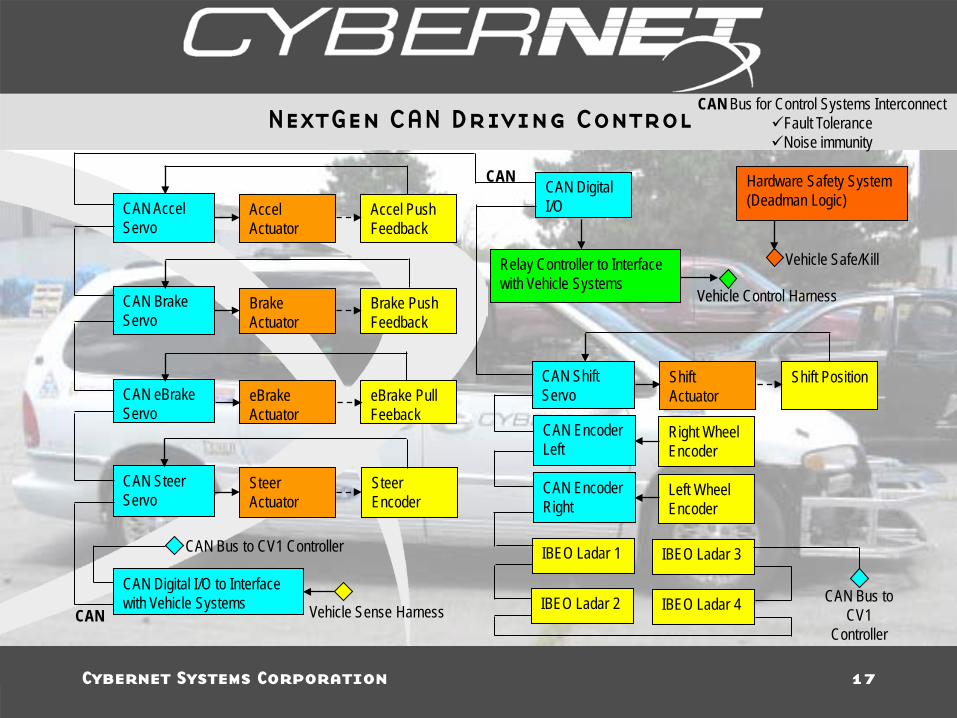
NextGen CAN Driving Control
CAN Accel Servo
CAN Brake Servo
CAN Digital I/O
CAN eBrake Servo
CAN Steer Servo
Accel Actuator
Brake Actuator
eBrake Actuator
Steer Actuator
Steer Encoder
Accel Push Feedback
Brake Push Feedback
eBrake Pull Feeback
Hardware Safety System (Deadman Logic)
Vehicle Safe/Kill Relay Controller to Interface with Vehicle Systems
CAN Shift Servo
Shift Actuator
Shift Position
CAN Encoder Left
Left Wheel Encoder
Right Wheel Encoder
CAN Encoder Right
IBEO Ladar 1
IBEO Ladar 2
IBEO Ladar 3
IBEO Ladar 4 CAN Digital I/O to Interface with Vehicle Systems
Vehicle Control Harness
Vehicle Sense Harness
CAN Bus to CV1 Controller
CAN Bus to CV1
Controller
CAN
CAN
CAN Bus for Control Systems Interconnect Fault Tolerance Noise immunity
Cybernet Systems Corporation 18
Contact Information
Dr. Charles Jacobus Mr. Steve Rowe Dr. Charles Cohen Cybernet Systems Corporation [email protected] www.cybernet.com www.openskies.com www.netmax.com, www.netmax.org www.cybernetmedical.com www.gesturecentral.com www.atacs.com





























