Upload
jsnyder6969
View
1.026
Download
20
Tags:
Embed Size (px)
Citation preview
10 Series CNC AMPSoftware Characterization Manual
Code: 45006667V Rev. 18
PUBLICATION ISSUED BY:PRIMA ELECTRO S.p.A. Strada Carignano, 48/2 - 10024 Moncalieri (TO) (Italy) Tel. Web: +39-011 9899800 www.osai.it; www.primaelectro.com
e-mail: [email protected] . Copyright 2011 by PRIMA ELECTRO All rights reserved Edition: September 2011
IMPORTANT USER INFORMATIONThis document has been prepared in order to be used by PRIMA ELECTRO . It describes the latest release of the product. PRIMA ELECTRO reserves the right to modify and improve the product described by this document at any time and without prior notice. Actual application of this product is up to the user. In no event will PRIMA ELECTRO be responsible or liable for indirect or consequential damages that may result from installation or use of the equipment described in this text.
abc
UPDATING 10 Series CNC - AMP Software Characterization Manual
UPDATES FOR THE PRESENT RELEASE GeneralThis publication has been issued following the Software Release 8.0. This page lists the modifications made to the manual in this version. PAGE INDEX CHAP 3 Page 2 Page 3 Page 4 Page 22 Page 33 CHAP 4 Page 10 Page 15 CHAP 5 Page 20 Page 31 UPDATE TYPE Updated Modified codes 11 and 12 Modified codes 32 and 37 Changed description Modified AUXILAIRY AXIS CHARACTERIZATION table Added the Null-motion threshold parameter
Modified PROCESS VARIABLES table Added parameters CRV, ERF, MOM, MOA and Toll contact mode
Modified AUXILAIRY AXIS CHARACTERIZATION table Added the Null-motion threshold parameter
10 Series CNC - AMP Software Characterization Manual
Preface 10 Series CNC - AMP Software Characterization Manual
PREFACE
This manual describes the characterization phase of the 10 Series CNC system through use of the AMP (Adjustable Machine Parameters) and Servo Monitor utilities. AMP allows the operator to enter all the necessary parameters and information to configure the system and the various machining processes. The Servo Monitor allows the operator to perform a tuning of the system in order to achieve optimum performance. The manual is intended for the operator that has in charge the system characterization after installation.
REFERENCESRead first: 10 Series CNC : Product Specification For further information: 10 Series CNC : User Guide 10 Series CNC : Programmer Guide
10 Series CNC - AMP Software Characterization Manual
1
Preface 10 Series CNC - AMP Software Characterization Manual
SUMMARYIn this guide the operator will find a short description of all the configuration parameters as well as the procedures for defining them. 1. General Concepts Contains a description of the numerical control terms used within the manual. 2. AMP Provides a general description of the AMP configuration procedures. 3. Global Parameters Configuration Describes the data entries used for configuring the global parameters. 4. Process Configuration Describes the data entries used for configuring the processes. 5. Axis Configuration Describes the data entries used for configuring the axes. 6. Human Interface Configuration Describes the data entries used for configuring the human interface. 7. THE SERVO MONITOR Describes the Servo Monitor Utility. 8. DSI SERVICE CHANNEL Describes the DSI Service Channel Utility. 9. MECHATROLINK DIGITAL DRIVES CONFIGURATION UTILITY Describes the Mechatrolink digital drives configuration utility. 10. EMERGENCY DIAGNOSTIC Describes the Emergency Diagnostic Utility. A. AMP - Error Messages Contains the list of error messages completes this guide. B. Generation of Help Files for OEM Softkeys Contains instructions to generate help files for OEM defined softkeys. C. Axis calibration from file Contains instructions to introduce calibration points of an axis.
2
10 Series CNC - AMP Software Characterization Manual
Preface 10 Series CNC - AMP Software Characterization Manual
TERMINOLOGYSome terms appearing throughout the manual are explained below. Control Refers to the 10 Series CNC numerical control unit comprising front panel unit and basic unit. Is the interface module between machine and operator; it has a monitor on which messages are output and a keyboard to input the data. It is connected to the basic unit. Is the hardware-software unit handling all the machine functions. It is connected to the front panel and to the machine tool.
Front Panel
Basic Unit
Is connected to developments or circumstances which can make damages to the system, to the equipments or to the operators.
Is connected to the information that it is necessary take in consideration in order to avoid damages to the equipment in general.
Is connected to the operations that it is necessary to execute carefully in order to assure the full success of the application.
10 Series CNC - AMP Software Characterization Manual
3
Preface 10 Series CNC - AMP Software Characterization Manual
END OF PREFACE
4
10 Series CNC - AMP Software Characterization Manual
Index 10 Series - AMP CNC Software Characterization Manual
INDEX
GENERAL CONCEPTS ................................................................... 1-1SYSTEM ARCHITECTURE ........................................................................................ 1-1 CLASSIFICATION OF THE MACHINE AXES ........................................................... 1-3 SERVO LOOP ............................................................................................................ 1-4 Position tolerance ............................................................................................. 1-5 Dead zone ......................................................................................................... 1-6 Travel limits ....................................................................................................... 1-6 Homing cycle .................................................................................................... 1-7 Manual/automatic switch search ....................................................................... 1-9 Miscellaneous axis parameters ........................................................................ 1-10 Operating limits ................................................................................................. 1-12 Measuring cycle ................................................................................................ 1-12 Coordinate display modes ................................................................................ 1-12 SPLIT AXES ............................................................................................................... 1-13 DUAL AXES ................................................................................................................ 1-15 AXES WITH ROLLOVER ........................................................................................... 1-16 DIAMETER AXES ....................................................................................................... 1-17 AUXILIARY AXES ...................................................................................................... 1-18 SPINDLE AXIS ........................................................................................................... 1-19 Spindle axis with gears ..................................................................................... 1-19 Spindle axis ramp ............................................................................................. 1-20 Spindle with trasducer ....................................................................................... 1-21 Spindle orientation ............................................................................................ 1-21 Spindle properties ............................................................................................. 1-22 HANDWHEEL ............................................................................................................. 1-24 PART PROGRAM-LOGIC INTERFACE .................................................................... 1-25 Synchronous mode ........................................................................................... 1-25 Asynchronous mode ......................................................................................... 1-25 Language expansion......................................................................................... 1-25 PSEUDO AXES .......................................................................................................... 1-26 VIRTUAL AXES .......................................................................................................... 1-26 USER INTERFACE ..................................................................................................... 1-26 Logic display ..................................................................................................... 1-26 OEM softkey ..................................................................................................... 1-26 VARIABLE SERVO ERROR ...................................................................................... 1-27 RIGID TAPPING PARAMETER CALCULATIONS .................................................... 1-30
10 Series CNC - AMP Software Characterization Manual
i
Index 10 Series CNC - AMP Software Characterization Manual
AMP .................................................................................................2-1SOFTKEY.................................................................................................................... 2-1 AMP main menu ................................................................................................ 2-2 Help ................................................................................................................... 2-3 Activate.............................................................................................................. 2-4 Select ................................................................................................................ 2-4 Characterization menu softkeys ........................................................................ 2-5 Operativity notes ............................................................................................... 2-7 Data Entry Storage ............................................................................................ 2-7 ENTER/EXIT THE CHARACTERIZATION ................................................................. 2-8 Edit Comment ................................................................................................... 2-10 Backup .............................................................................................................. 2-10 Delete ................................................................................................................ 2-11 Print ................................................................................................................... 2-11 AMP print utility error messages ....................................................................... 2-18
GLOBAL PARAMETERS CONFIGURATION ..................................3-1HARDWARE 10/110 AND 10/510 SYSTEM .............................................................. 3-2 HARDWARE (10/565 AND 10/585 SYSTEMS) .......................................................... 3-7 GENERAL INFORMATION ......................................................................................... 3-10 LOGIC CONFIGURATION .......................................................................................... 3-12 Short Variables .................................................................................................. 3-14 Double Variables ............................................................................................... 3-16 Auxiliary Axis General Information .................................................................... 3-18 Select Auxiliary .................................................................................................. 3-20 Auxiliary Axis Characterization ........................................................................ 3-21 Notes on characterization of D.S.I digital drivers .............................................. 3-37 Notes on the characterization of OS-Wire digital drivers .................................. 3-38 Notes on the characterisation of Mechatrolink digital drives ............................. 3-38 Physical Conn ................................................................................................... 3-39 Axis Calibration ................................................................................................. 3-41 OPTIONS .................................................................................................................... 3-43 DOS Real-time .................................................................................................. 3-44 END User Dos ................................................................................................... 3-45 DOS Graphics ................................................................................................... 3-46
PROCESS CONFIGURATION .........................................................4-1SELECT PROCESS .................................................................................................... 4-2 PROCESS CONFIG .................................................................................................... 4-3 Proc Char .......................................................................................................... 4-3 Proc Variables ................................................................................................... 4-9 Progr Char ......................................................................................................... 4-18 M Codes ............................................................................................................ 4-21 G Codes ............................................................................................................ 4-25 GTL (Geometrical Technological Language) ................................................... 4-28 Virtual Axes ....................................................................................................... 4-30 E Parameters .................................................................................................... 4-32 User Variables ................................................................................................... 4-33
ii
10 Series CNC - AMP Software Characterization Manual
Index 10 Series CNC - AMP Software Characterization Manual
AXIS CONFIGURATION.................................................................. 5-1AXIS CONFIGURATION............................................................................................. 5-1 Axis General Information .................................................................................. 5-2 Pseudo Axes ..................................................................................................... 5-5 Spindle .............................................................................................................. 5-6 Notes on the characterization of D.S.I digital drivers ........................................ 5-15 Probing.............................................................................................................. 5-16 Select Axis ........................................................................................................ 5-18 Axis Characterization ........................................................................................ 5-19 Notes on the characterization of D.S.I. digital drivers ....................................... 5-37 Notes on the characterization of OS_wire digital drivers .................................. 5-38 Notes on the characterisation of Mechatrolink digital drives ............................. 5-38 Axis Charact (Slave axis selected with "Select Axis") ...................................... 5-39 Axis Calibration ................................................................................................. 5-40 Physical Connection ......................................................................................... 5-43
HUMAN INTERFACE CONFIGURATION ....................................... 6-1HUMAN INTERFACE ................................................................................................. 6-1 H.I. Gen Info...................................................................................................... 6-2 Add Scr Config .................................................................................................. 6-5 Common Screen ............................................................................................... 6-6 Process Screen ................................................................................................ 6-7 Select Menu ...................................................................................................... 6-8 OEM SK Config................................................................................................. 6-10 Select DE .......................................................................................................... 6-13 DE Config.......................................................................................................... 6-15 PPDIR Config.................................................................................................... 6-18
THE SERVO MONITOR .................................................................. 7-1USING THE SERVO MONITOR ................................................................................. 7-2 ENABLING THE SERVO MONITOR ......................................................................... 7-3 CHANGE PARAM ....................................................................................................... 7-4 Null Offset ......................................................................................................... 7-5 Tolerance .......................................................................................................... 7-6 Dead Zone ........................................................................................................ 7-8 Backlash ........................................................................................................... 7-9 KC KV VFF ....................................................................................................... 7-10 Servo Error........................................................................................................ 7-12 Feed/Acc/Jrk ..................................................................................................... 7-14 Spindle .............................................................................................................. 7-16 Operative Limits ................................................................................................ 7-19 Split Param. ...................................................................................................... 7-20 Broken wire ....................................................................................................... 7-22 Ramp Time ....................................................................................................... 7-23 CONFIGURING THE OSCILLOSCOPE ..................................................................... 7-24 Config. oscill...................................................................................................... 7-24 Feedrate on the profile ...................................................................................... 7-26 Feed calculated (single axis) ............................................................................ 7-28 Following error (single axis) .............................................................................. 7-30
10 Series CNC - AMP Software Characterization Manual
iii
Index 10 Series CNC - AMP Software Characterization Manual
Feed and error on same axis ............................................................................ 7-32 CONTINUOUS MODE ................................................................................................ 7-33 TRIGGER MODE ........................................................................................................ 7-33 DATA DISPLAY MODES ............................................................................................ 7-33 ANALYZING THE DATA (EXAME)............................................................................. 7-36 Main menu and graphics ................................................................................... 7-36 Zoom ................................................................................................................. 7-37 Time Enlarge ..................................................................................................... 7-37 Dimension ......................................................................................................... 7-37 Check ................................................................................................................ 7-38 Save ASCII ........................................................................................................ 7-38 SAVING AND RESTORING DATA ............................................................................. 7-39 Save .................................................................................................................. 7-39 Restore .............................................................................................................. 7-40 ERROR MESSAGES .................................................................................................. 7-41
DSI SERVICE CHANNEL.................................................................8-1SETUP ......................................................................................................................... 8-2 DESCRIPTION ............................................................................................................ 8-3 SAVE ALL ................................................................................................................... 8-4 Format and syntax of the configuration file ....................................................... 8-5 LOAD........................................................................................................................... 8-8 SELECT AXIS ............................................................................................................. 8-12 READ BLOCK ............................................................................................................. 8-14 WRITE DATA .............................................................................................................. 8-16 COMMAND ................................................................................................................. 8-17 SAVE AX INFO............................................................................................................ 8-18 SHOW LOAD LOG ..................................................................................................... 8-19 LOADING DSI DRIVErs PARAMETERS .................................................................... 8-20 Usage Mode ...................................................................................................... 8-20 Application notes ............................................................................................... 8-21 ERROR MESSAGES .................................................................................................. 8-22
MECHATROLINK DIGITAL DRIVES CONFIGURATION UTILITY ..9-1INTRODUCTION ......................................................................................................... 9-1 DESCRIPTION OF FUNCTIONS ................................................................................ 9-2 PRELIMINARY TECHNICAL CONSIDERATIONS ON MECHATROLINK ............ 9-2 BASICS ....................................................................................................................... 9-3 APL and ALT files.............................................................................................. 9-3 USING THE PACKAGE .............................................................................................. 9-8 Files needed ...................................................................................................... 9-8 Creating an ALT file from a Microsoft Excel file .............................................. 9-8 Creating an APL file from a Microsoft Excel file .............................................. 9-8 Automatic database creation ............................................................................. 9-9 Starting the program. ........................................................................................ 9-9 Softkey menu .................................................................................................... 9-9 Selecting an axis ............................................................................................... 9-10 Changing the parameters set ............................................................................ 9-10 Parameter reading and writing .......................................................................... 9-11 Information on the drive .................................................................................... 9-12 Saving changes ................................................................................................. 9-13
iv
10 Series CNC - AMP Software Characterization Manual
Index 10 Series CNC - AMP Software Characterization Manual
Monitoring ......................................................................................................... 9-15 PARAMETER CHANGE DETAILS ............................................................................. 9-17 PARAMETER SUPERVISOR ..................................................................................... 9-18 Error codes displayed ....................................................................................... 9-19
D.S.I. SPINDLE DRIVE SETUP..................................................... 10-1configuring the operative modes ............................................................................ 10-1 configuring the external transducer ....................................................................... 10-3 configuring the type of axis ..................................................................................... 10-4 configuring the position scale ................................................................................. 10-5 configuring additional parameters .......................................................................... 10-6
EMERGENCY DIAGNOSTIC ........................................................ 11-1EMERGENCY START ................................................................................................ 11-1 EMERGENCY DIAGNOSTIC Screen Softkeys ................................................ 11-2 TABLE RESET UTILITY............................................................................................. 11-4 Reset DP........................................................................................................... 11-6 Select Tables .................................................................................................... 11-7 Delete Tables .................................................................................................... 11-8 Save DP (Save DUAL PORT memory request) ............................................... 11-11 Restore DP (Restore DUAL PORT memory request) ...................................... 11-15 Delete Files (Backup file procedure) ................................................................. 11-19 LANGUAGE MANAGEMENT UTILITY ...................................................................... 11-22 Activate ............................................................................................................. 11-25 Create ............................................................................................................... 11-27 Delete................................................................................................................ 11-29 Text Handler ..................................................................................................... 11-30 Text Types ........................................................................................................ 11-31 Compare ........................................................................................................... 11-33 Update .............................................................................................................. 11-35 Show diff ........................................................................................................... 11-36 Modify ............................................................................................................... 11-37 EDITOR FOR MODIFYING TEXT FILES ................................................................... 11-38 SOFTKEYS OF THE EDITOR FOR CONFIGURATION FILE MODIFICATION .......................................................................................................... 11-41 DELETE ............................................................................................................ 11-41 INSERT ............................................................................................................. 11-41 MODIFY ............................................................................................................ 11-42 SK MODIFY ...................................................................................................... 11-43 DE MODIFY ...................................................................................................... 11-45 HELP MODIFY.................................................................................................. 11-46 ERR MODIFY ................................................................................................... 11-48 ERROR ATTRIB ............................................................................................... 11-49 VIEW ................................................................................................................. 11-50 BACKUP ........................................................................................................... 11-51 RESTORE......................................................................................................... 11-52 EXIT .................................................................................................................. 11-53 OFF-LINE VERSION OF LANGUAGE UTILITY ............................................... 11-54 GENERAL EXEC FILE COMPILING UTILITY ........................................................... 11-56 DSI REBOOT CONFIGURATION .............................................................................. 11-59 CFG DSI Setup ................................................................................................. 11-60 DATA RESTORE ........................................................................................................ 11-61
10 Series CNC - AMP Software Characterization Manual
v
Index 10 Series CNC - AMP Software Characterization Manual
ERROR MESSAGES .................................................................................................. 11-62 Reset Tables Utility ........................................................................................... 11-62 Utility Languages ............................................................................................... 11-64 Utility Compiler .................................................................................................. 11-70 Utility DSI Reboot Configuration ........................................................................ 11-72
AMP - ERROR MESSAGES ........................................................... A-1MESSAGE DESCRIPTION AND RECOVERY ACTION ............................................ A-1
GENERATION OF HELP FILES FOR OEM SOFTKEYS ................ B-1HELP file - menu association ............................................................................ B-1
AXIS CALIBRATION FROM FILE ................................................... C-1GENERAL ................................................................................................................... C-1 File Format ........................................................................................................ C-2 Error conditions and messages......................................................................... C-3
END OF INDEX
vi
10 Series CNC - AMP Software Characterization Manual
Chapter
1
GENERAL CONCEPTS
This chapter provides a glossary of the terms used in the present AMP Configuration Guide. For users who are not familiar with NC technology it may serve as an introduction to the philosophy underlying system operation. Users with extensive NC experience can use it as a source of lexical reference. Special attention has been devoted to the classification of the axes and to the description of the characteristics of the various types. Users already familiar with numeric control machines may use this chapter as a terminology reference.
SYSTEM ARCHITECTUREThe architecture of 10 Series CNC can be broken down into four partitions, each of which controls a specific set of features.
10 Series CNC - AMP Software Characterization Manual
1-1
Chapter 1 General Concepts
HARD DISK UNIT OPERATOR PANEL COMMUNICATIONS OPERATING SYSTEM INTER-PROCESS COMMUNICATIONS
FLOPPY DISK UNIT
H
UTILITIES
CN PROCESS
I/O INTERFACE
HUMAN INTERFACE
The major function of each partition is as follows: Numerical Control Utilities I I/O Interface Human Interface Includes the part program interpreter, the axes interpolator and the process manager for machining centers. ncludes a series of text-only and graphics packages that can be used by the end user, the OEM or the technical assistance. Controls the execution of the machine tool/control interface code that has been developed by the OEM. Controls all the data input and display operations and the man/machine interface.
1-2
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
CLASSIFICATION OF THE MACHINE AXES10 Series CNC can control the following types of axes: Coordinated axes These are physical axes that move in coordination with each other. Each 10 Series CNC AMP process can move 9 simultaneous axes and up to 9 coordinated axes. These are physical axes that are not requested to move in coordination with each other. This is the tool-holder spindle. 10 Series CNC can associate one spindle with each process.
Auxiliary axes
Spindle axis
The axes can also be classified according to the type of move that they must carry out: linear axis rotary axis split axis It is an axis moving on a rectilinear trajectory It is a coordinated axis programmable in degrees. It is a physical axis coupled to a pair of motors for synchronized motion. It is an axis whose moves are dependent on the moves of the master axis to which it is coupled. It is a coordinated axis that must be programmed and displayed with a 2 coefficient.
dual axis
diameter axis
They are also classified as a function of type of interface with the drive. In this manual we distinguish between analog and digital axes according to the following criteria: Analog axes The axes in this class are (coordinated, auxiliary and spindle) axes whose interface with the drive is an analog homing signal. Axes managed by boards with D/A converters and Bridge OS-Wire devices are part of this class. (Coordinated, auxiliary and spindle) axes whose interface with the drive system is a digital homing signal, and for which communications are performed through high level protocols. This class includes the OS-Wire axes connected to OS3 drives (OSAI protocol), D.S.I. (digital Standard Interface) axes and the axes with Mechatrolink interface.
Digital axes
10 Series CNC - AMP Software Characterization Manual
1-3
Chapter 1 General Concepts
SERVO LOOP10 Series CNC permits to define the algorithms that are used for servo loop control of each axis. Such algorithms are based on three configurable constants, Kc, Kv and Kcs. 10 Series CNC uses these constants in the following formula: Vout = (Le * Kv + Vff) * Kc Where: Vout output voltage is the voltage output by the Digital/Analog converter is the variance between the programmed axis position requested by the control and the actual position measured by the position transducer is the position loop gain velocity feed forward is a velocity value that is proportional to the programmed axis feedrate.
Le
lagging error
Kv
servo loop gain
Vff
The units of measure for the constants are: Le [mm], Kv [1/s], Vff [mm/s] (Le * Kv + Vff) represents a velocity. Therefore, Kc is a velocity-to-voltage conversion factor . The control applies the following internal formula: Vout = Le' * K + Vff * Kc Where: Le' Vff K is the lagging error expressed in "encoder pulses" is a function of the interpolation clock is the result of multiplying Kc by Kv
K and Kc are calculated using parameters established in the system configuration. The formulas are: Kc = Vm*60 60000 8192 * * Fm Cki 10
K=
Vm*60 Pm 8192 * * * (Kv * 16.66666666...) Fm Pe 10
1-4
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
For the spindle, the formula is: Kcs = Where: Vm = maximum voltage Fm = maximum velocity Pm = mechanical pitch Pe = electrical pitch Cki = interpolator clock [ms] 8192 is the number of possible output levels for the D/A converter 10 is the maximum positive or negative voltage output of the D/A converter 60000 is the minute-to-millisecond conversion factor. Vm 8192 * Fm 10
Position toleranceThe position tolerance is the threshold within which the axis must position at motion end. If the axis is out of tolerance, the move is not considered terminated. When a move ends, if the position control is active, the system checks that all the axes are in the programmed position and that their lagging error (Le) is smaller than the threshold configured in the "in position band" field. To enhance the positioning accuracy, the "in position band" threshold must remain active during an interval specified in the "in position window" field. If it does not, or if the positioning error is out of tolerance after the interval specified in the "in position time-out", the system generates an emergency condition.
lagging error
in position band
t
in position window in position time-out
10 Series CNC - AMP Software Characterization Manual
1-5
Chapter 1 General Concepts
Dead zoneIt is the threshold within which the D/A reference voltage output remains to zero irrespective of the position error. The dead zone must be smaller than the position tolerance.
Travel limitsEach axis moves within the limits of an operating field, which is a function of the characteristics of the machine and can be established by means of physical and/or calculation devices which protect the axis from erroneous operation or loss of control.
+
operating limitend of travel overtravel -
overtravel+ end of travel+ operating limit+ zero microswitch
The axis travel limits may be controlled by: positive/negative end of travel microswitches positive/negative end of travel microswitches positive/negative operating limits NOTE: In many applications zero microswitch can be coincident with end of travel.
1-6
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
The microswitches start operating as soon as the machine is switched on whereas the operating limits, which are based on the axes positions, start operating only after the axes have been homed. The overtravel microswitches are normally connected directly to the power circuitry of the axes. In order to enable the travel microswitches that are connected to the I/O board they must be managed by the logic. Operating limits are managed directly by the control. While the control executes a special cycle, such as tool or pallet change, the operating limits can be disabled or modified by the logic to allow displacements beyond the limits. Operating limits must be disabled/modified with standstill axes.
Homing cycleEach time the system is switched on it is necessary to execute a homing cycle, i.e. to move the axes to the microswitch that is considered as the machine zero. The aim of this operation is to reset the internal counters that measure the axes positions. For analog axes, zero microswitches have to be managed by the foreground logic according to which signal status must be read in the appropriate bits of status words SW03 and SW04 (See PLUS APPLICATION MANUAL). This cycle is referred to as Homing cycle or Axis reference cycle."
I/O RING MODULE
optical fiberI/O CARD
FOREGROUNDSW
Ixx
The status of signals SW3 and SW4 must be interpreted as follows: 1= microswitch released 0= microswitch closed
10 Series CNC - AMP Software Characterization Manual
1-7
Chapter 1 General Concepts
To invert this operation mode it is necessary to write the NOT operator in the logic equations. The homing cycle makes all the requests and signal controls that permit to refer the machine zero to the initial time. As a rule, in OS-Wire digital axes connected to OS3 OSAI drives, microswitches are connected to the drive itself. It is possible to continue using the microswitches managed by machine logic by changing their resetting mode (see below for details). A homing cycle can be broken down into four main steps: 1. Zero switch search During this step the axis makes a linear displacement in search of the zero microswitch. As the contact with the microswitch occurs, the axis decelerates until it comes to a complete stop. 2. Zero switch release n this step the axis reverts the direction of motion and moves until the zero microswitch is released. The return velocity is equal to the configured "home position feed" and cannot be altered by the "feed override". 3. Electric zero search This step starts when the microswitch is released. The system waits for the electrical zero (i.e. marker ) to be read and then stops the axis. 4. Return to electric zero After the system has acquired the coordinates in which the electrical zero was read, the axis is returned to the zero position. If at cycle start the microswitch is already closed, the system will carry out only the last three steps. If the axis is configured with an optical linear scale, the microswitch is assumed to be missing and 1only the last two steps will be carried out: in this case the electrical zero switch search speed will be the one used in manual mode. The homing cycle will be interrupted if the system is reset or put on hold. To resume the cycle a CYCLE START command must be given.
1-8
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
F+" h o m e lim it s w itc h r e le a s e d " d e te c te d b y P . L .U .S . a n d n o tifie d to th e s y s te m
+ "manual" feed
" h o m e lim it s w itc h p r e s s e d " d e te c te d b y P .L .U .S . a n d n o t if ie d t o th e s y s te m
marker "home feed"
O t
AXIS HOMED w/o null offset
AXIS HOMED with null offset
"manual feed"F-
- "manual" feed
Manual/automatic switch searchThe switch search can be carried out manually or automatically. The "homing cycle type" field permits to define the switch search mode to be used in the homing cycle for each process. Manual switch search The characteristics of the manual switch search cycle to be carried out by the process axes are as follows: 1. prior to starting the cycle the operator must check that the selected direction of motion is compatible with the configured direction. 2. during the first step, i.e. while the axes are moving towards the microswitch, the operator must not release the CYCLE START pushbutton. If the command is to be sent by the logic, this means that no CYCLE STOP command must be given. 3. after the microswitch has been found the homing cycle will be completed even if the CYCLE START pushbutton is released and unless a RESET or HOLD command is given. Automatic switch search The characteristics of the automatic switch search cycle are: 1. the direction of motion is automatically selected by the control. 2. after the homing cycle has been launched, the operator can release the CYCLE START pushbutton. The cycle will be completed unless a RESET or HOLD command is given.
10 Series CNC - AMP Software Characterization Manual
1-9
Chapter 1 General Concepts
Miscellaneous axis parameters10 Series CNC also allows characterization of the following axis parameters: 1. null offset 2. home position corrects the position of the zero microswitch defines a machine zero that is independent from both the physical position of the zero microswitch and the actual axes displacement.
c (machine zero) b (theoretical home switch)a (physical home switch)The positions shown in the figure are as follows: a) physical position of the zero microswitch b) theoretical position of the zero microswitch
home position
null offset
c) machine zero referred to the theoretical machine zero with respect to which all the other axis position parameters are defined. The examples that follow show how to use these parameters: correct microswitch position machine zero on the zero microswitch null offset = 0 home position = 0
a=b=cabsolute position transducer plane
0 0
100 100
physical home switch theoretical machine zero
1-10
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
microswitch position error machine zero on the microswitcha=cabsolute position transducer plane
null offset = +5 home position = 0b 0 5100
-5 0
+105
null offsetphysical home switch theoretical machine zero
no microswitch position error offset between machine zero and physical microswitcha=babsolute position transducer plane
null offset = 0 home position = +100
c
-100 0
0100
home positionphysical home switch theoretical machine zero
microswitch position error offset between the machine zero and the zero microswitchaabsolute position transducer plane
null offset = +5 home position = +100c
b-100
-105 0
0 +105
5
null offsetphysical home switch theoretical
home positionmachine zero
10 Series CNC - AMP Software Characterization Manual
1-11
Chapter 1 General Concepts
Operating limitsThe operating limits are defined with respect to the machine zero (c) in the AMP.
Measuring cycleThe coordinates read by the axes boards are referred to the machine zero (c).
Coordinate display modes10 Series CNC permits the display of the following axis coordinates: Absolute coordinates Machine coordinates Work coordinates Distance to go Error referred to the machine zero (c) referred to the machine zero (c) and including the origins programmed coordinates difference between programmed and machine coordinates difference between interpolated and real coordinates
The example that follows illustrates an axes calibration sequence. 1. Set the "null offset" and "home position" fields in the AMP to zero. 2. Key in the corrections to the geometrical errors in the AMP. This corrections are based on the mecahnical distances to the physical microswitch. 3. Switch off and reboot the control. 4. Home the axis. 5. Move the axis to the position in which the zero microswitch should have been wired. 6. With the axis in this position read the "absolute position" coordinate. 7. Write this value in the "null offset" AMP field for the axis in object. 8. If the home position is to be established on a value other than zero, write this value in the "home position" AMP field for the axis in object. 9. Switch off and reboot the control. 10. From this point, all the machine coordinates are measured with respect to the "machine zero". 11. If necessary, define the operating limits in the AMP. These limits are always referred to the "machine zero".
1-12
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
SPLIT AXESA split axis (gantry) is a physical axis coupled to a pair of motors or drives. Split axes are typical of large machines and of machines with special mechanical requirements, such as From the User's standpoint, a split axis is seen as one single axis configured as a Master.
Servo motor 1
Axis
Servo motor 2
The parameters that configure a split axis are: SKEW It is the maximum acceptable disalignment between two physical axes. Two maximum values are configured: the first one (Max Skew Error) is used both during movement for non referred axes and during the marker search; the second (Skew Error) is used for all other movements for referred axes and after the marker search. When the current skew error exceeds the configured value, an emergency condition (Skew Error) occurs. SKEW GAIN permits to specify the skew compensation value.
SKEW
When the split axis is enabled, the system calculates at each sampling the lagging errors of the master (Lem = Lagging Error Master) and the slave (Les = Lagging Error Slave). The misalignement (SKEW) can be calculated as follows:
SKEW = Lem - Les
10 Series CNC - AMP Software Characterization Manual
1-13
Chapter 1 General Concepts
The result of multiplying the SKEW value by the SKEW GAIN can be used for calculating new lagging errors with the folllowing formulas: Lem' = Lem + (Skew Gain * (Skew/2 ) )
Les' = Les - (Skew Gain * (Skew/2) ) If these new lagging errors are multiplied by a K constant, the resulting voltages on the D/A converter represent positive and negative skew compensations to be applied to the master and the slave. Such compensation tends to re-align the axes correctly. In case of emergencies (servo, error, skew error ...) and of all operations generating disabling and abling of a couple of split axes, it is necessary to refer the axes again in order to ensure correct application of configured null offset and home position parameters and recuperate the misalignment between the two physical axes that the activation/deactivation condition may have generated.
The figure illustrates how the wiring and/or the mechanical orientation permit to shift the counting direction of the position transducer or the rotation of the motor between the master and the slave. (T=transducer, M=motor)
MASTER T
SLAVE M T
M
MASTER
SLAVE
T
T M
M
1-14
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
DUAL AXESDual axes are two or more axes that follow an identical trajectory. A typical application of this feature are multiple heads and multi-spindles.
Axis 1
Servo motor 1
Servo motor 2
Axis 2
With dual axes, only the programming of the master axis is mandatory. The master-slave association must be defined by the program (refer to the UDA instruction in the Programming Guide).
10 Series CNC - AMP Software Characterization Manual
1-15
Chapter 1 General Concepts
AXES WITH ROLLOVERThe axes with rollover are linear or rotary axes whose position is controlled by the system within a range from zero to the value configured in the "Rollover pitch" field. The sign of the quote programmed for the axis with rollover indicates the rotation direction: positive, rotation is in a clockwise direction negative, rotation is in an anticlockwise direction. Examples:270
180 0
359.999
0
90 CLOCKWISE ROTATION ANTICLOCKWISE ROTATION
1-16
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
DIAMETER AXESDiameter axes are coordinated axes that must be programmed and displayed with a 2 coefficient. Example:
10 Series CNC - AMP Software Characterization Manual
1-17
Chapter 1 General Concepts
AUXILIARY AXESAuxiliary axes are interpolated axes that are managed directly by the machine logic. This feature permits to control those axes that do not take part in the machining process but support auxiliary functions such as tool change chains, part change gates, etc. 10 Series CNC can control up to 32 simultaneous auxiliary axes coordinated with one another. Auxiliary axes remain independent from machining axes and work in parallel with the machine tool activities. Example:
STEP
Step Pocket
= Distance between two pockets = Generic position of a tool in the tool magazine.
1-18
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
SPINDLE AXISThe spindle axis is the axis on which the tool is mounted during the machining cycle. It may correspond to one of the machine axes.
SPINDLE
Spindle axis with gearsGears are speed reduction devices that can be installed between the motor and the spindle. They enhance the motor performance by allowing to reach a high torque at medium and low speeds. 10 Series CNC MC can control spindles with as many as four different gears. Prior to enabling a range it is necessary to configure the corresponding conversion factor between the maximum voltage applied to the servo drive and the spindle velocity in rpm. It is also possible to configure various "servo loop gain" values for each gear used by the spindle with transducer during spindle orientation. The parameters that configure this feature are: "Voltage for max RPM gear n" "Max speed for gear n".
10 Series CNC - AMP Software Characterization Manual
1-19
Chapter 1 General Concepts
Spindle axis ramp10 Series CNC permits to configure whether the converter voltage is to vary uniformly (i.e. follow a variation ramp) or make a step when the programmed rotation speed varies. In spindle drives this control is carried out by an input compensation net. By using the potentialities of the control unit and disactivating the compensation network it is possible to optimize spindle functionality, mainly for threading cycles and orienting. Examples: Spindle axis without ramp.
Vlt o+7.5
-7.5Spindle axis with ramp.
Vlt o+7.5
-7.5
rt
To establish a ramp it is necessary to configure the "reversal time", i.e. the time employed by the spindle for switching from the maximum clockwise rotation speed to the maximum counter clockwise rotation speed with the gear that allows the lowest voltage/speed ratio. Such gear must also be configured. If the ramp is not configured, these parameters must nevertheless be specified because they are used during tapping and boring canned cycles.
1-20
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
Spindle with trasducerThe position transducer has two basic applications: 1. execution of threading and tapping cycles 2. spindle orientation to a defined position.
Spindle orientationWith 10 Series CNC spindle orientation is made possible by the $SORIENT machine logic function. To compensate the offset between the transducer electrical zero and the spindle physical zero it is possible to define an "Offset for spindle orientation" in the AMP. The orientation cycle is carried out in interpolated mode and requires definition of the following additional parameters to define the execution type. NOTE: The orientation cycle may include the search for the marker and the ensuing reset. This is always so when a channel is opened (SOPEN) or after a SRESET request, provided that the value is greater than 1879048192 transducer pulses. The marker is performed in a speed loop. Speed for Spindle Orientation This parameter defines the threshold of speed below that the control enables spindle positioning. If the orientation request is made when the spindle rotates at a higher speed, the system will take the spindle to a lower speed before enabling the positioning cycle. Acceleration for Orientation This parameter specifies the spindle acceleration during orientation. Since the gears and the loads affect the spindle response, it is advisable to assign to this parameter a value smaller than the result of the following calculation:
Vm 1 * 60 TR*0.5 where: VM TR Is the "Voltage for max RPM" defined for the gear used for setting the "Spindle reversal time". Is the "Spindle reversal time".
NOTE : Speed stop threshold , in position wait and in position window. The orientation phase in which the search for the marker takes place can be performed in two different modes depending on whether these three parameters are set on zero or on.
10 Series CNC - AMP Software Characterization Manual
1-21
Chapter 1 General Concepts
If any of them is zero, once the marker has been found the shift from the speed loop to the position loop takes place at once. Otherwise it is possible to have a stop phase between the speed loop (when the marker has been found) and the position loop (when the spindle begins to be positioned according to the orientation angle). This can prevent axle jolts. To this end, the three parameters in question have to be configured correctly: SPEED STOP THRESHOLD (minimum speed threshold below which the spindle is assumed to be stationary during the stop phase after the finding of the marker), IN POSITION WAIT (maximum wait time before the threshold is reached) and IN POSITION WINDOW (time base for the determination of actual spindle speed). If the timeout expires, it is assumed that the spindle has stopped and the spatial positioning stage has started (no emergency is triggered).
Spindle propertiesThe use of a spindle axis can be reserved for a single process, or shared by several processes, or not associated with any process. These three conditions are referred to as EXCLUSIVE, SHARED and RELEASED, respectively. Shared status makes it possible to perform machining cycles in various processes using the spindle axis in common; tapping (G84) and boring (G86), instead, are fixed cycles requiring exclusive use. By analogy, each process is associated with a specific axis status and hence cannot use the spindle in management mode, it can use it either in shared mode or in exclusive mode. At power-up, the spindle starts in a predetermined status, depending on how it has been configured in AMP. If the axis has been configured for a single process, then it will start out in EXCLUSIVE mode, or, if it has been configured for several processes, it will be SHARED. In order to obtain the latter mode, configure the axis completely in a process (field Spindle = Yes): in the other cases, the axis is declared as shared (field Spindle = Shared) with the same id.
Starting from the initial condition, for each process the status of the axis can be changed by means of the GTS triliteral (Get Spindle). Admissible spindle status transitions include: EXCLUSIVE RELEASED: EXCLUSIVE SHARED: SHARED EXCLUSIVE: the owner process using an axis in exclusive mode releases the axis the owner process using an axis in exclusive mode wants to share it a process becomes the sole owner of an axis and acquires it in exclusive mode; this transition cannot be made on an axis shared by several processes the last co-owner process releases the axis a process acquires an axis for exclusive use a process acquires an axis in shared mode
SHARED RELEASED: RELEASED EXCLUSIVE: RELEASED SHARED:
1-22
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
When a process acquires a new spindle, the current spindle is automatically released. If a process uses the machining cycles associated with a spindle it must always program the S function, in relation to processing needs; in other words, spindle sharing (whether through AMP or GTS) does not result in the automatic setting of actual axis status. For example, let us assume that S1000 is programmed in process 1 and the spindle is acquired by process 2, in the latter the S function continues to be set on the last value programmed for that process, and the spindle keeps revving at 1000 RPM. The management of spindle sharing by several processes is by the machine logic, which will accept or deny axis programming in a process depending on whether or not the axis is already being controlled by another. In this connection, the GTS command opens the logic filter through which the operation requested can be either confirmed or aborted (for a more detailed explanation see the PLUS and WinPLUS application manual). The filter task is not opened in the following conditions: the axis is in the required mode, the request cannot be met (for instance, if you try to obtain the exclusive use of a spindle which is being shared), or an error has occurred. If it is not enabled by the filter, the entire operation is aborted and a process error message is given out. If no errors occur and the filter enables the operation, the spindle makes the transition to the status programmed in the GTS. Notes on some logic functions. 1) The $PARK_SP function does not work on a spindle in SHARED status. 2) The $GET_SP function forces spindle status to EXCLUSIVE, i.e., reserved for exclusive use by the process specified as input to the function.
Configuring a digital spindleIn addition to the analog spindle, a D.S.I. digital spindle, mated to a Bosch-Rexroth drive, can also be configured. For the configuration in AMP, see the section on the spindle axis in chapter 5; for the application notes, see the PLUS/WinPLUS Application Manual. For the configuration of the drive, see the D.S.I. SPINDLE DRIVER SETUP section in this manual.
10 Series CNC - AMP Software Characterization Manual
1-23
Chapter 1 General Concepts
HANDWHEELThe handwheel is a position transducer connected to one of the encoder inputs of the axes board. By means of the OS-Wire bus it is possible to connect the handwheel to one of the encoder inputs of a Bridge device or to the AUX FEEDBACK input of an OS3 drive. The handwheel makes it possible to move the selected axis by a quantity proportional to the angular variation of the transducer itself. To ensure maximum accuracy, it must comply with the following requirements: 1. The axis to be moved must be a configured axis. 2. The axis and the handwheel must be configured on the same board. 3. The handwheel encoder input must not be associated to any other configured axis. 4. The axis associated to the handwheel must be in idle status, i.e. it cannot be in motion. 5. If the handwheel is active it is not possible to carry out axis motion and axis enable/disable operations directly on the axis. 6. Scale factor, representing the correspondence between handwheel impulses and distance to be covered by the axis, must be chosen correctly. Scale factor in fact, must have a value sufficient to grant the axis a jumpless movement even when the handwheel is moved very fast. For ex.: if the scale factor is very high therefore, if each minimum movement of the handwheel corresponds to a great axis movement, the axis itself could not be able to execute that movement correctly.
A SERVO ERROR may be generated in this situation. Modification of the configured servo error value might be necessary in order to optimize the hamdweel's function (see "POSITION ERROR WITHOUT VFF" description in chapter 5 of this manual)
ENABLE/DISABLE of handwheel is prompted through logic functions (See PLUS Library Manual)
1-24
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
PART PROGRAM-LOGIC INTERFACEThe dialogue between the part program and the machine logic can be synchronous or asynchronous.
Synchronous modeIn this mode the part program makes a series of requests that must be acknowledged before execution. These functions include: motion start/end M functions spindle S functions tool T functions pseudo axes T and S follow predefined rules, whereas M functions are configurable and can be adapted to more specific requirements (refer to Chapter 4, Section "M Codes").
Asynchronous modeThis mode exploits the possibility to render a series of machine logic variables visible to the part program. In the system configuration (see Chapter 3, Section "Logic Configuration") each variable must be associated to a mnemonics (which will be used by the part program) and to an optional initialization value. These variables do not lose their contents when the system is switched off.
Language expansionLogic global variables make it possible for the part program to acquire information that is not directly accessible. For example, the part program can learn the axis position by using an M function in order to command the PLUS logic to carry out the acquisition, write the result in a shared variable (GW or GD) and eventually authorize the part program to resume execution. M100 @ COORD_W Part program: N001 M3 X123.4 Y321.5 M100 N002 E10=@COORDINATE_W N003 Y(E10/2) The logic can use global variables also as preset values or as non-volatile memory. To render these variables inaccessible to the part program they must not be associated to a mnemonics. (M to request the position of the W axis) variable shared with PLUS
10 Series CNC - AMP Software Characterization Manual
1-25
Chapter 1 General Concepts
PSEUDO AXESPseudo axes are written in the program without being associated to actual system axes. They are used for requesting the machine logic to execute specific functions. They have the same functionality of the PRELUDE M function. Among the typical pseudo axes functions are: regulation of the water jet, management of secondary spindles, etc.
VIRTUAL AXESThey are used to define some functionalities in AMP like axes virtualization. The only parameter to be configured is the Axis ID. They don't have neither name nor characteristics.
USER INTERFACE10 Series CNC provides a series of predefined video pages that can be enlarged to occupy the full screen or reduced to quadrants that display information about one topic. The size and contents of the video pages and the sequence in which they are displayed can be configured in the AMP (refer to the "Human Interface" chapter in this manual).
Logic displayWith the $WSCREEN PLUS function it is possible to write alphanumeric and or semigraphic color characters in the display areas reserved for the machine logic. The machine logic can also be used for developing those texts that vary through system operation. The SYNOPTIC EDITOR utility, that is also available in the PLUS environment (see Plus User manual), permits the predefinition for each screen of graphics that will be loaded at system bootstrap.
OEM softkeyThe dialogue between the operator and the machine can be facilitated by creating a tree of softkey menus. The meaning of each softkey is application specific and can be established by the machine logic. The softkeys are the tools that permit to give a command, i.e. enable a given machine logic area. Within each area it is therefore necessary to establish the procedures for command recognition and execution. In some cases, activation of the softkey must be accompanied by a data input. The interactions between the system and the operator can be developed by composing the video screens that will be under machine logic control. Such screens prompt the operator to select a course of action by means of the OEM softkeys and/or to input additional bits of information.
1-26
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
VARIABLE SERVO ERRORThe Variable Servo Error feature consists in a new logic control of the Servo Error during axis moves. Usually the Servo Error is taken as absolute (i.e. it is directly compared with the axis tracking error). This new feature allows to consider the Servo Error as an additional element to be added to the theoretical tracking error, the axis is accumulating during its move based on the programmed parameters (speed, gain, active or inactive VFF and VFF%). During the movement, the algorithm is used to determine the theoretical error of the axis (based on the instantaneous velocity of the axis), to which the configured delta is added. If the movement is of type "without VFF" (e.g., it is a manual movement), the error accumulated during the time delay due to the position loop is also added. Once the threshold value has been obtained, it is compared with the following error. The error accumulated during the feedback delay is calculated on the basis of the rapid acceleration and is equal to: Epsi_delay = rapid acc / (kv * 16.6666)
Here 'rapid acc' and 'kv' are in the measurement units of the AMP. THIS SUM IS ONLY CALCULATED ONCE AT START-UP AND NOT CHANGED THEREAFTER.
In order to enable this feature you have to set the value of the movement Servo Error without VFF so that it is smaller than the theoretical error calculated with maximum speed (the Maximum Feed field in AMP) with VFF at zero. Once enabled, the algorithm becomes active for moves with as well as without VFF and takes the delta value from the pertinent configured Servo Errors. The algorithm becomes active at the start of a move if a comparison shows that the Servo Error value is smaller than the theoretical maximum (which is calculated only once at start-up on the basis of the data configured in AMP). If this condition is not met, the algorithm does not start and the Servo Error is taken as an absolute value in the usual manner. The algorithm does not become active, when a VFF value equal to 100% has been configured on the axis during a VFF move (the theoretical error is then zero, therefore the value of the configured Servo Error is directly applied). For Split axes the feature only works on the master axis. This feature is not activated on spindle type axes and with the Electronic Cam function. Change of parameters by the Servo Monitor may change the Servo Error application algorithm.
10 Series CNC - AMP Software Characterization Manual
1-27
Chapter 1 General Concepts
Note on the digital axes. Starting from fixup 1 release 7.3, the activation of the algorithm has been extended to the axes with digital interface. For axes of this kind, consider that: 1. the axis reacts according to the KV and VFF gains set on the drive (SERCOS, MECHATROLINK or OS-Wire). Considering that the theoretical error is determined by the CNC based on the KV and VFF values set in AMP, it would be advisable, to the extent feasible, to set the same values on the drive. 2. The following error determined by the CNC is greater than the real axis error due to the time delay in data transmission. Due to these changing conditions, it is not possible to find a mathematical rule for the determination of the threshold to be set in AMP, as is done for analog axes, and the threshold has to be determined empirically through various movement tests performed with the axis in the conditions requested by the application.
Example 1 : maximum feed acceleration Servo Loop gain Position Error with VFF Position Error without VFF VFF% = = = = = = 4000 mm/min 300 mm/sec 1 5 mm 5 mm 100
The theoretical error for comparison at maximum feed without VFF results as 4 mm. Given that the Position Error without VFF is set to 5, the algorithm is not enabled and Servo Error emergency is triggered, when the error exceeds 5 mm. Example 2 : maximum feed acceleration Servo Loop gain Position Error with VFF Position Error without VFF VFF%
= = = = = =
4000 mm/min 300 mm/sec 1 1.5 mm 2.5 mm 100
As in the previous example the theoretical error is 4 mm. For moves with VFF the Position Error without VFF is set to 1.5, but the algorithm is not enabled, because VFF is equal to 100%. Hence Servo Error emergency is triggered when the error exceeds 1.5 mm.
1-28
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
For moves without VFF the Position Error without VFF is set to 2.5 (i.e. smaller than 4). Therefore the algorithm is enabled and the error delta is 2.5 plus the delay equal to 300 / (16.666) = 3.58. If the current feed is 2000 mm/min, Servo Error emergency is triggered when the error exceeds 2 + 3.58 = 5.58 mm.
Example 3 : maximum feed acceleration Servo Loop gain Position Error with VFF Position Error without VFF VFF%
= = = = = =
4000 mm/min 300 mm/sec 1 1.5 2.5 50
As before the theoretical error for comparison is 4 mm. For moves with VFF the error delta with VFF is 1.5. Assuming a feed of 2000 mm/min is programmed, the theoretical error is 1 mm (as the current feed will be with VFF at 50%). Therefore the Servo Error emergency triggers when the error exceeds 1 + 1.5 + 300 / (16.666) = 3.58 mm. For moves without VFF the error delta is 2.5. With a feed of 3000 mm/min the Servo Error emergency triggers when the error exceeds 3 + 2.5 +1.08 = 6.58 mm.
10 Series CNC - AMP Software Characterization Manual
1-29
Chapter 1 General Concepts
RIGID TAPPING PARAMETER CALCULATIONSIn order to correctly build the rigid tapping cycle (see programming manual) you must look for and save two parameters by using the same configuration as VFF that you use during machining. These are the TKG and TAG parameters which represent the compensation coefficients for the command application delay from the servo system for controlling axes and spindle. In particular the TKG parameter is used for recovering errors in the constant speed feed phases while the TAG parameter is used for recovering errors in the axes acceleration and deceleration phases used in tapping (typically the Z axis) Calculation procedure: Before checking that the parameters are correct in the machine AMP, you must configure a fictitious coordinated axis, without convertors or transducers and residing in the process to which the Z axis and the spindle used for the tapping belong. This axis will obviously have an identifier (IDx). You should make this change on a copy of the machine AMP so that you dont have to change again once you have found the parameter values. After switching on the control you have to enter in Manual Data Input the command TMA=IDx where IDx is the identifier of the fictitious axis previously configured. This command is necessary in order to be able to correlate the configured axis with the characterisation of rigid tapping. At this point the Servo Monitor has to be programmed for monitoring the speed of the axis used in tapping (typically Z) and the speed of the fictitious axis. In this case the phase difference between the physical position of the spindle and the position programmed for the Z axis in millimetres is shown on the fictitious axis. By executing tapping cycles without a work piece and each time modifying the TKG and TAG parameters you can achieve to eliminate or almost eliminate the phase difference shown. Practically it is best to work only with the TKG parameter and to eliminate the constant speed error neglecting the error trend in the acceleration phase. Once you have found the correct value for the TKG parameter you then go over and try to find the optimal value for the TAG parameter.
1-30
10 Series CNC - AMP Software Characterization Manual
Chapter 1 General Concepts
The next figure shows an example on how this is displayed on the Servo Monitor
V axis Z
AV axis IDX
B
A
Once you have found the values for the TAG and TKG parameters, these are valid for all types of tapping, also with spindle steps and speed different from those used for the tests. The values found have to be inserted into a routine or a macro which assigns parameters and has to necessarily be called by all programs which carry out tapping operations.
10 Series CNC - AMP Software Characterization Manual
1-31
Chapter 1 General Concepts
END OF CHAPTER
1-32
10 Series CNC - AMP Software Characterization Manual
Chapter
2
AMP
AMP (Adjustable Machine Parameters) is one of the utilities installed in the OEM Utility partition of the system. AMP allows the user to set the parameters that define the various processes to be run by the machining centre. To enter the AMP utility, press the softkey UTILITY in the general 10 Series CNC screen.HELP OEM SOFTKEYS UTILITY
10 Series CNC general screen
AMP utility selection AMP
Access to the AMP utility is also possible with the system in emergency, i.e. by holding down key [F1].
SOFTKEYThere are seven softkeys to handle the configuration environment: by pressing the right most softkey the operator can select the menu line that contains the desired item with a loop cycle (the selected line is displayed in a different colours) the middle softkeys correspond to the items of the selected line. By pressing one of these softkeys, the operator can access the desired data entry by pressing the left most softkey the operator can always return to the main menu.
10 Series CNC - AMP Software Characterization Manual
2-1
Chapter 2 AMP
AMP main menuWhen AMP is activated, the first displayed menu is shown in the following picture:
Adjust Machine Parameters SELECTED AMP 3
date: dd/mm/yy ACTIVATED AMP 0
time: hh:mm:ss RUNNING AMP 0INFORMATION BOX
-- A M P D I R E C T O R Y L I S T -0 - DEFAULTConfiguration 0-3
COMPILED Y NCONFIGURATION STATUS
1 - DEFAULT 23-
CURSORHELP ACTIVATE SELECT BACKUP EDIT COMMENT DELETE PRINT EXIT
SOFTKEYS
AMP utility allows to manage 4 different configurations; this is very useful to switch from one configuration to another one. The configurations are numbered from 0 to 3 and can associate a comment (that is displayed close the configuration number). The desired configuration can be selected using the arrows keys:
The blue cursor will highlight the request configuration.
2-2
10 Series CNC - AMP Software Characterization Manual
Chapter 2 AMP
INFORMATION BOXES Selected AMP It is the selected configuration to be modified Activated AMP It shows the configuration that will be used on the next power up. Running AMP It shows the configuration that was used during the last (current) power up. CONFIGURATION STATUS Y N (Empty) The AMP configuration has been compiled successfully The AMP configuration has not been compiled or the compilation was not ended successfully The AMP directory is void.
CURSOR AND CONFIGURATION They highlight one of the 4 possible configurations. SOFTKEYS They allows to activate the possible functions. They will be explained in detail in the following pages.
HelpAt any moment during the AMP configuration, the user can display additional information about a certain parameter or sub menu by selecting the HELP softkey. This help text is displayed within a window on the right side of the screen and varies according to the context in which it has been activated: if the user has selected the HELP softkey when a menu is on the screen, the help text will contain information about that specific menu (data entries and associated parameters); if Help is activated when a data entry is on the screen, the help text will contain information about parameter values (range, restrictions, measuring, unit, etc.).
10 Series CNC - AMP Software Characterization Manual
2-3
Chapter 2 AMP
ActivateActivates the configuration (0-3) selected via the arrow keys and highlighted by the blue bar. The configuration number is displayed in the central information box. This configuration will be used by 10 Series CNC on the next power up.
Trying to activate a configuration that was not previously compiled, the error "AM155 AMP directory can not be activated: binary file does not exist" is generated. To get information regarding the compilation, see also the section regarding the SELECT softkey.
SelectOpens the characterization, this will be ended pushing the EXIT softkey. See also the "Enter/Exit the characterization" paragraph.
SELEC BACKUP
AMP main menu
first lineHARDWARE SELECT PROCESS GENERAL INFO PROCESS CONFIG LOGIC CONF AXIS CONFIG
Characterization menu
OPTIONS HUMAN INTERF
HELP EXIT
third line second line
2-4
10 Series CNC - AMP Software Characterization Manual
Chapter 2 AMP
Characterization menu softkeysThe first line of the characterization menu included the following softkeys for global parameter configuration (chapter 3). HARDWARE data entry GENERAL INFO data entry Hardware configuration of the system General information for configuration (measuring unit, number of configurable processes, logic variables) LOGIC CONF sub menu BOOLEAN VAR SHORT VAR DOUBLE VAR AUX GEN INFO SELECT AUX AUX CHARACT PHYSICAL CONN AXIS CALIBR Option sub-menu DOS REAL-TIME UND USER DOS DOS GRAPHICS HELP (Real-time DOS Interface) (End User Dos utility) (DOS Graphic Utility Interface) Help text (LOGIC CONFIGURATION) (Booleans variables) (Short variables) (Double variables) (Auxiliary axes general information) (Auxiliary axes selection) (Auxiliary axes characterization) (Physical connection) (Axis calibration)
The second line includes the following softkeys associated to process related functions. SELECT PROCESS data entry (PROCESS SELECT) It is meaningful for multi process systems only and allows to select the process to be configured. All the information that follows is related to the selected process.
10 Series CNC - AMP Software Characterization Manual
2-5
Chapter 2 AMP
PROCESS CONFIG sub-menu GTL VIRTUAL AXES E PARAMETERS USER VARIABLES PRO CHAR PROC VARIABLES PROGR CHAR M CODE G CODE AXIS CONFIG sub-menu AXES GEN INFO PSEUDO AXES SPINDLE PROBING SELECT AXIS AXIS CHARACT AXIS CALIBR PHYSICAL CONN HUMAN INTERF sub-menu HI GEN INFO ADD SCR CONFIG COMMON SCREEN PROCESS SCREEN SELECT MENU OEM SK CONFIG SELECT DE DE CONFIG PPDIR CONFIG
(PROCESS CONFIGURATION) (High level geometry) (Virtual axes) (E variables) (User variables) (Process characterization) (Process variables) (Program characteristics) (M code) (G code) (CO-ORDINATE AXES CONFIGURATION) (Co-ordinate axes general information) (Pseudo axes) (Spindle characterization) (Touch probe) (Axis selection) (Axis characterization) (Axis calibration) (Physical connection) (OPERATOR INTERFACE) (Operator interface general information) (Additional screen configuration) Not available (Process screen cycle) (OEM menu selection) (OEM softkey configuration) (OEM data entry selection) (OEM data entry configuration) (Part program directory configuration)
The third line of the menu includes the EXIT softkey EXIT (Exit for the characterization session).
2-6
10 Series CNC - AMP Software Characterization Manual
Chapter 2 AMP
Operativity notesWhen the user has selected the desired data entry with the proper softkeys, he can start defining the associated parameters with the alphanumeric keyboard. The cursor is automatically positioned on the value field of each parameter. The operator can accept the displayed value or he can insert a new one. If necessary, the operator can move the cursor by using the arrow keys. The correct range of values for each parameter is shown in the Help window that the operator can display by pressing the HELP softkey. In some cases the permissible range is displayed as a list (for example, user variable names, coordinate axis names, etc.). For each entered value, AMP performs range and congruency checks. In case of mistakes, the relevant error message is displayed (see Appendix A) and the cursor remains on the wrong parameter. Some data entries can be listed on more than one screen page. The user can display the various pages by using [Pg Dn] and [Pg Up] keys.
Data Entry StorageOnce the data entry has been completed, the user can confirm and store it in the AMP files, by pressing the [Enter] key. To abort a data entry it is possible to press the [Esc] key.
10 Series CNC - AMP Software Characterization Manual
2-7
Chapter 2 AMP
ENTER/EXIT THE CHARACTERIZATION10 Series CNC manages up to 4 "on line" configurations. When the SELECT softkey is used to modify the selected configuration (0, 1, 2 or 3), this is copied in a work directory. All the changes will be made in the work directory. Following configuration (press EXIT), there are 3 alternatives: 1. Perform the secondary calculations transforming the information entered (source files) into a configuration that may be used by the bootstrap (binary files). 2. Save the data entered without performing the secondary calculations (this may also be useful in cases where errors that cannot be eliminated at the time are signalled during the secondary calculations but you want to save the changes made in any case). In this case, any binary files generated previously are lost and care must be taken because, if the AMP directory was the active one, on rebooting the system will not find the binary configuration files and the control will have to be started in emergency mode to generate and activate an AMP configuration. 3. Do not save the new configuration. In this case any changes made are lost. If there were binary files for the previous configuration, these will be maintained as the source files from which they were generated have not been changed. You are advised to use this exit mode when entering the configuration for consultation to avoid losing the binary files. Remember the meaning of the terms Source and Binary for the AMP utility: SOURCE FILES BINARY FILES contain the information entered with the data entry. files generated by the secondary calculations and actually used by 10 Series CNC to configure the machine on starting (BOOTSTRAP).
Examples: If you press SELECT (see figure) configuration no. 1 becomes the working configuration.
AMP directory
Working directory
AMP0 Select AMP1 EXIT
AMP2
AMP3
2-8
10 Series CNC - AMP Software Characterization Manual
Chapter 2 AMP
After changing the configuration, press EXIT. The system asks if the secondary calculations are to be made. If the answer is "Y", the binary files will be generated (if there are no errors, in which case you stay in the configuration stage); this is the case of alternative 1.HELP
EXIT
Characterization menu New file generation data entry
-- EXIT -Translate new parameters? (Y/N) Y
On the other hand, if the answer is "N", the system will ask if you want to save the changes to the source files or not.HELP EXIT Characterization menu New file generation data entry
-- EXIT -Translate new parameters? (Y/N) N
-- SAVE -Save new configuration? (Y/N)
If the answer in the SAVE data entry is "Y", the changes become operative (case 2). If the answer is "N", any changes made will be lost (case 3). If the system is powered off while in the process of configuring a selected AMP directory, any changes made will be lost.
10 Series CNC - AMP Software Characterization Manual
2-9
Chapter 2 AMP
Edit CommentThis softkey in the AMP main menu allows to insert/modify the comment associated to the configuration. This comment must be used to identify a specific configuration (0-3) in the AMP DIRECTORY LIST.
EDIT COMMENT DELETE
AMP main menu Data Entry Edit Comment
-- EDIT AMP DIRECTORY COMMENT --
#
NOTE: # identifies the number of the current characterization To exit the data-entry, push EDIT COMMENT softkey again.
BackupThis softkey enter in the Backup utility. This utility allows to save, restore or copy an AMP configuration data-entry.
SELECT BACKUP
AMP main menu
Backup Data Entry
-- B A C K U P -From : To :
2-10
10 Series CNC - AMP Software Characterization Manual
Chapter 2 AMP
Where: From: It is the source directory. It is one of the four AMP Directories; in this case it must be a number between 0 and 3. Destination directory: It is one of the four AMP directories (number between 0 and 3) or another directory defined



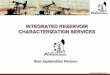
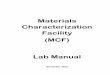





![Groundwater Investigation and Characterization · Groundwater Investigation and Characterization ... manual for environmental site characterization [2] ... through drilling, well](https://img.pdfslide.us/doc/110x75/5b4001557f8b9a5e528ccc77/groundwater-investigation-and-characterization-groundwater-investigation-and.jpg)

















