Embed Size (px)
Citation preview
Amnon Ta-Shma Uri ZwickTel Aviv University
Deterministic Rendezvous, Treasure Hunts
andStrongly Universal Exploration Sequences
The Rendezvous problem
Two robots are activated, at different times and in different locations, in
an unknown environment
Should both follow deterministic sequences of instructions
The instructions should guarantee that the two robots meet in a polynomial number of steps,
after the activation of the second robot

The unknown environment
An undirected (cubic) graph. Graph and its size uknown to robots
Vertices are undistinguishable
Exits are numbers. No consistently assumed
1
32
2
12
No pebbles allowed
Robots meet when they are in the same vertex at the same time
Robots move synchronously
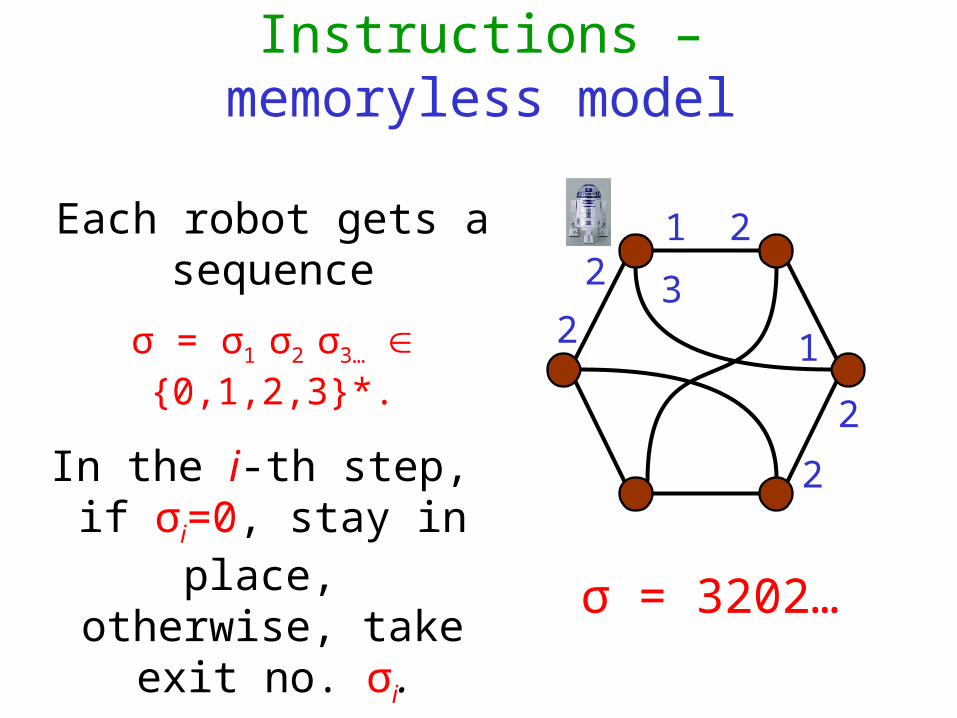
Instructions – memoryless model
Each robot gets a sequence
σ = σ1 σ2 σ3… {0,1,2,3}*.
In the i-th step, if σi=0, stay in place,
otherwise, take exit no. σi.
1
322
12
2
σ = 3202…
2
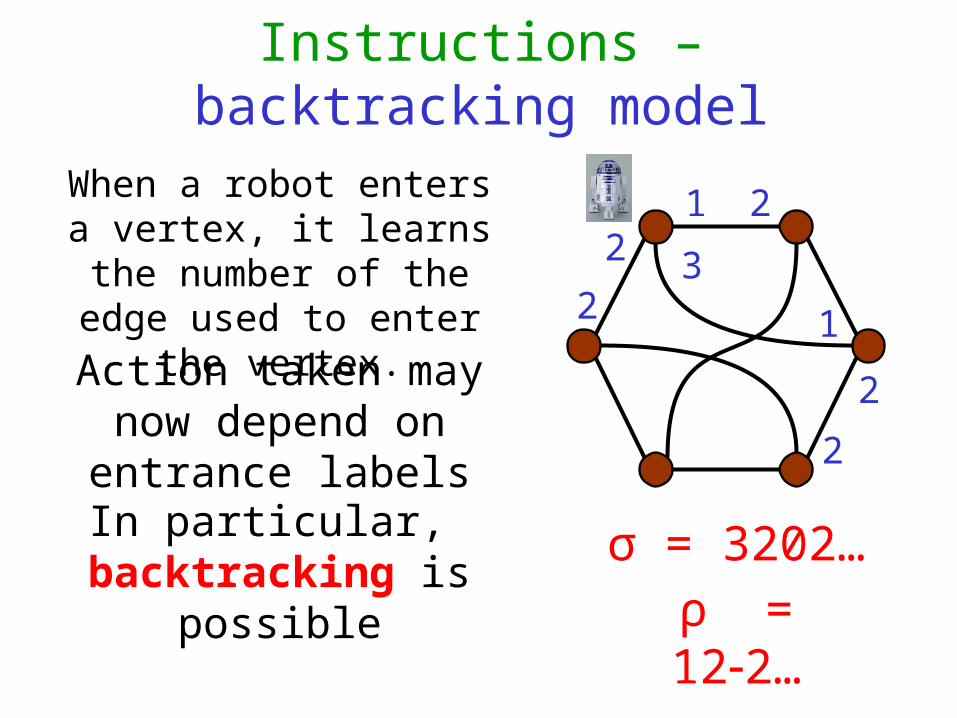
Instructions – backtracking model
When a robot enters a vertex, it learns the number of the
edge used to enter the vertex.
1
322
12
2
σ = 3202…
2
ρ = 122…
Action taken may now depend on entrance labels
In particular, backtracking is possible
Parameters
n – size of the environment
l – length (in bits) of smaller label
τ – difference in activation time
Results
Dessmark, Fraigniaud, Pelc (2003)Dessmark, Fraigniaud, Kowalski, Pelc (2006)
Kowalski, Malinowski (2006)
Rendezvous after O*(n5(τl)1/2+n10l) steps
Rendezvous after O*(n15+l3) stepswhen backtracking allowed
Our resultRendezvous after O*(n5l) steps
Additional results
The previous results guarantee a rendezvous after a polynomial number of steps.
But, we do not know how to compute these steps in polynomial time…
We give the first polynomial stepsand polynomial time solution in the
backtracking model
Symmetry breaking
12
2
1
1
22
2
1
1
1
2
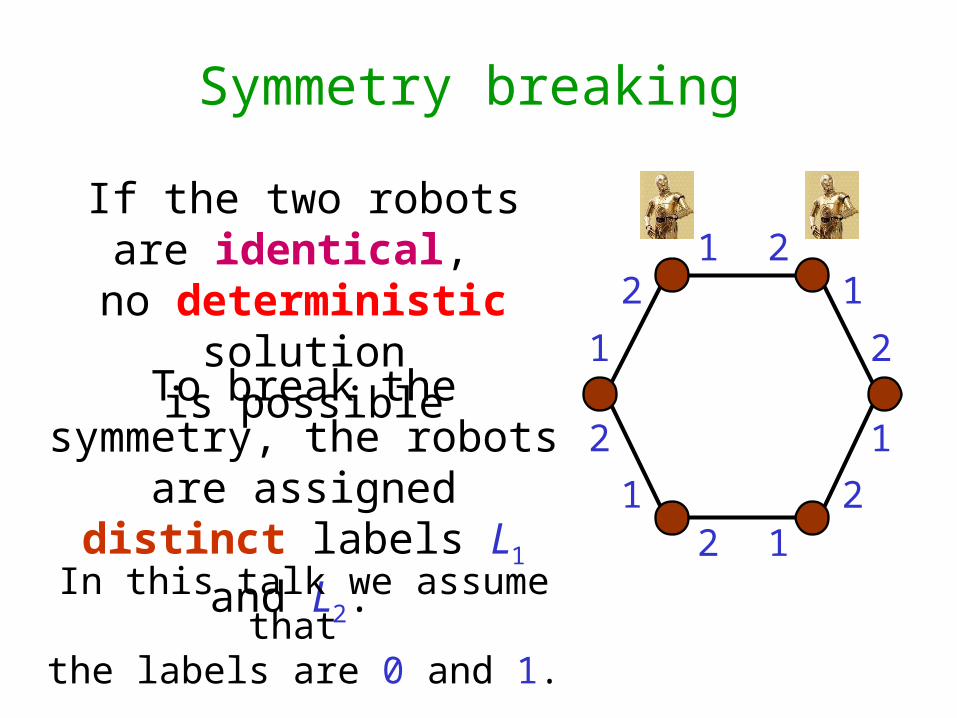
If the two robots are identical,
no deterministic solutionis possible
To break the symmetry, the robots are assigned distinct
labels L1 and L2.
In this talk we assume that the labels are 0 and 1.
Randomized rendezvous
If randomization is allowed, then achieving a rendezvous is easy:
Each robot simply performs a random walk.Expected number of steps before the two
robots meet is O(n3) Coppersmith, Tetali, Winkler (1993)
Alternatively, one of the robots performs a random walk while the other stays put.
Universal Traversal Sequences (UTS)
A sequence σ {1,2,3}* is a UTS for (cubic) graphs of size n if for every connected (cubic) graph of size at most n, every labeling and every starting
point, the walk defined by σ covers the graph.
Aleliunas, Karp, Lipton, Lovasz, Rackoff (1979)A random sequence of length O(d2n3log n) is,
with high probability, a UTS for d-regular graphs of size n.
No efficient construction known!
A natural solution -That doesn’t quite work…
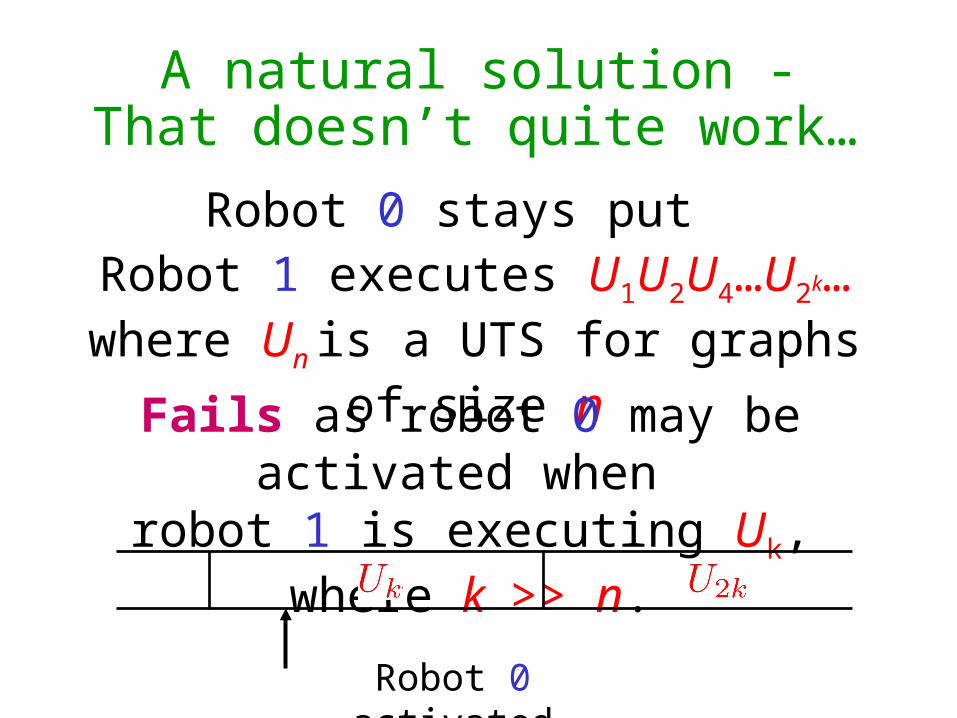
Robot 0 stays putRobot 1 executes U1U2U4…U2k…
where Un is a UTS for graphs of size n
Fails as robot 0 may be activated when
robot 1 is executing Uk, where k>> n.
Robot 0 activated
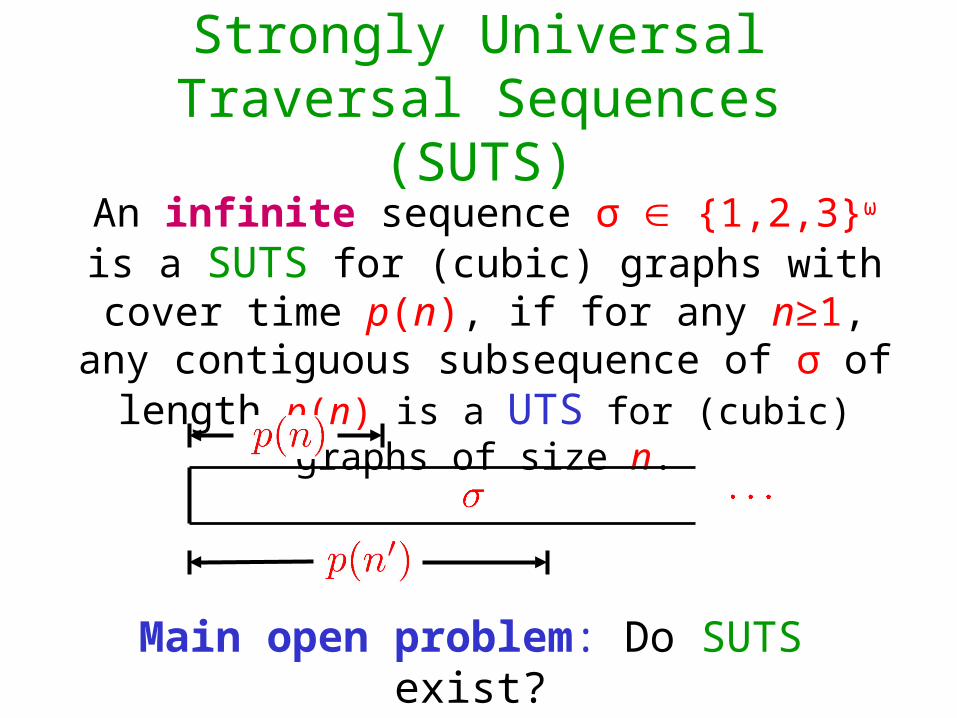
Strongly Universal Traversal Sequences (SUTS)
An infinite sequence σ {1,2,3}ω is a SUTS for (cubic) graphs with cover time p(n), if for any n≥1, any contiguous subsequence of σ of length p(n) is a
UTS for (cubic) graphs of size n.
Main open problem: Do SUTS exist?
Treasure hunt
The version of the rendezvous problem in which one of the robots is static.
In the memoryless model, equivalent to the existence of SUTS.
Treasure may be activated after the seeking robot.
We obtain an efficient solution when backtrackings are allowed.
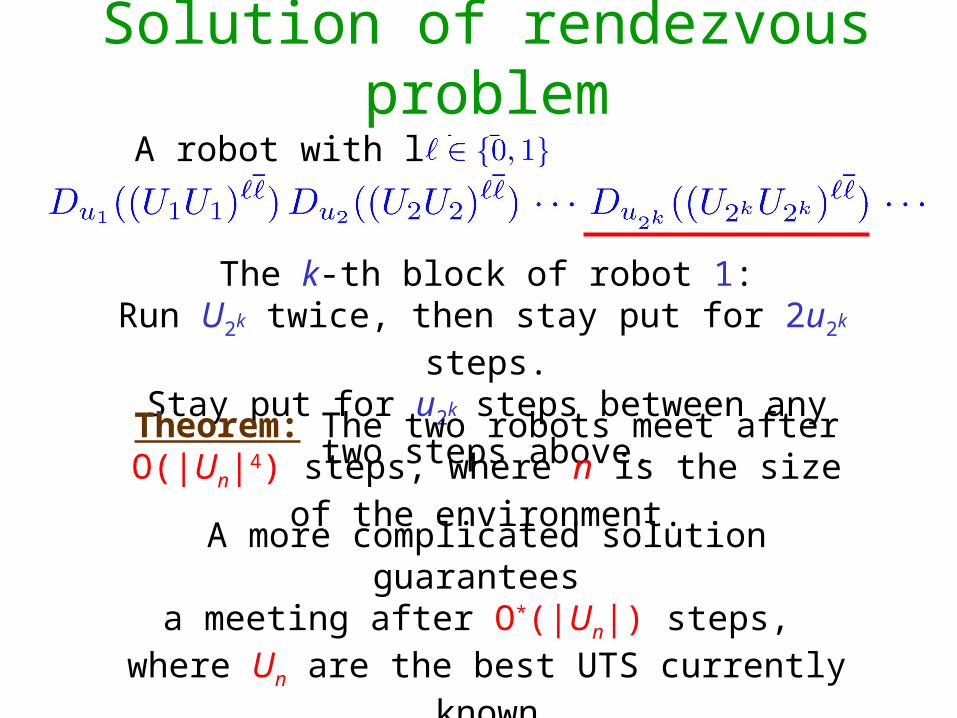
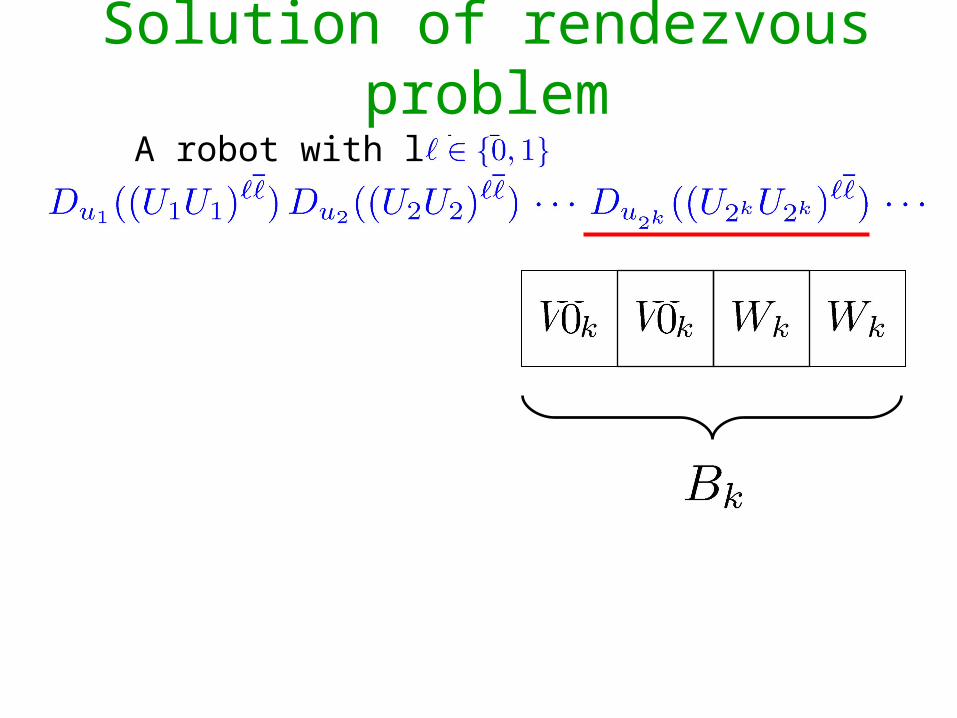
Solution of rendezvous problem
A robot with label uses the sequence:
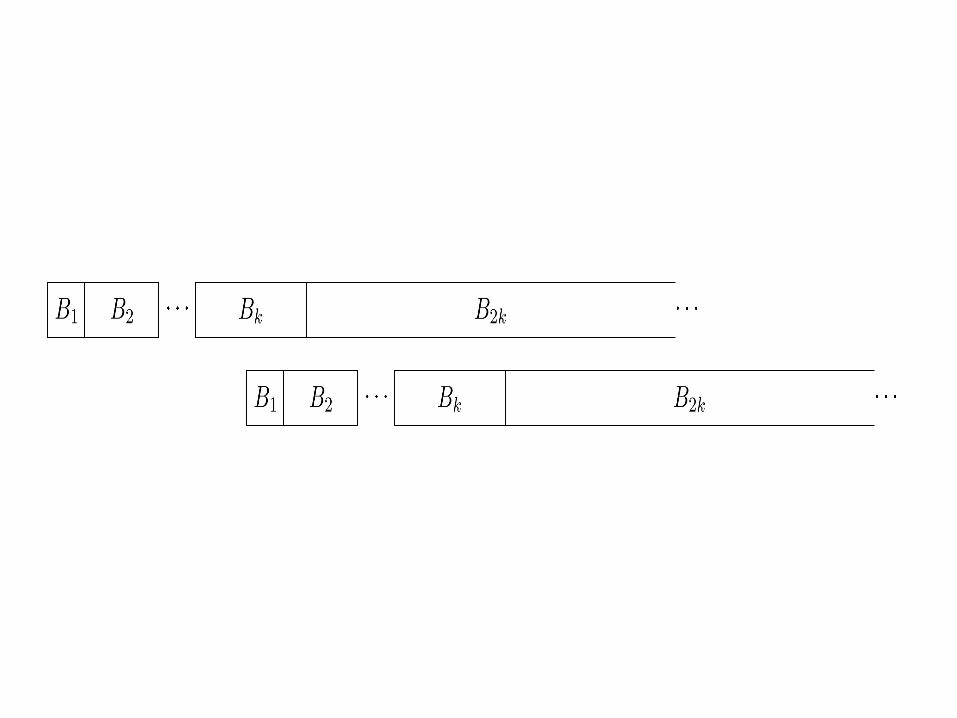
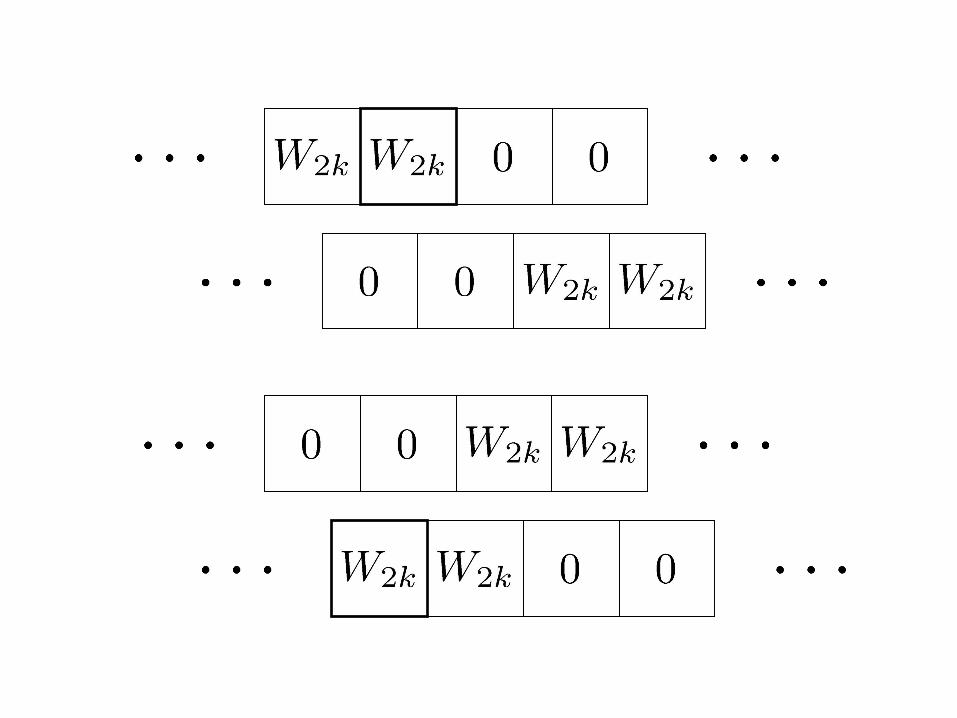
The k-th block of robot 1:Run U2k twice, then stay put for 2u2k steps.
Stay put for u2k steps between any two steps above.
A more complicated solution guarantees a meeting after O*(|Un|) steps,
where Un are the best UTS currently known
Theorem: The two robots meet after O(|Un|4) steps, where n is the size of the environment.
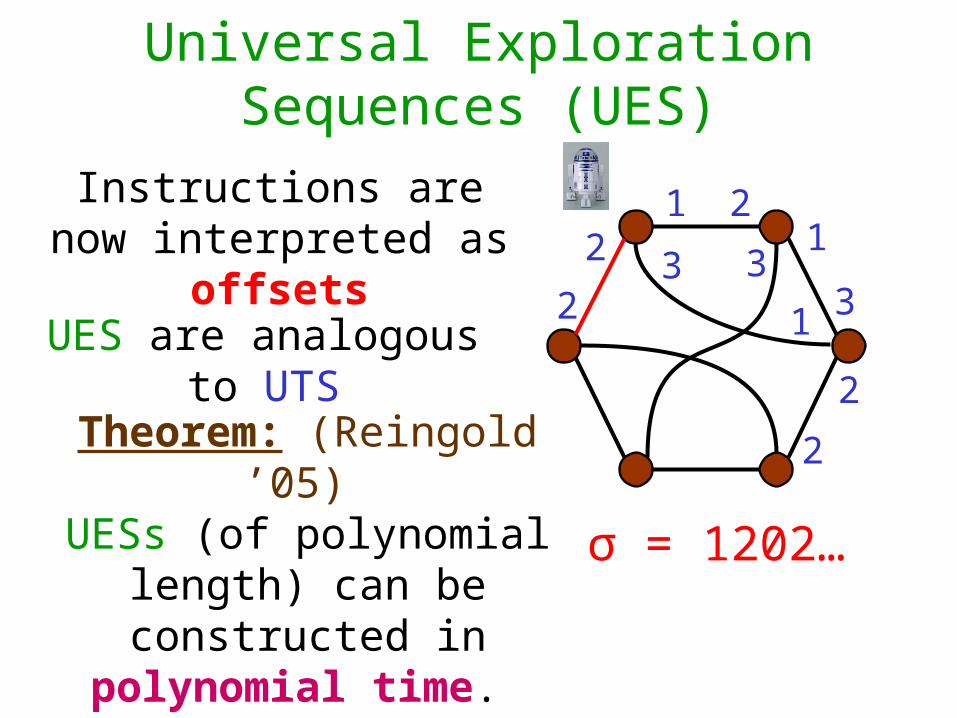
Universal Exploration Sequences (UES)
Instructions are now interpreted as offsets
1
322
12
2
σ = 1202…
2
33
1
UES are analogous to UTS
Theorem: (Reingold ’05) UESs (of polynomial length)
can be constructed in polynomial time.
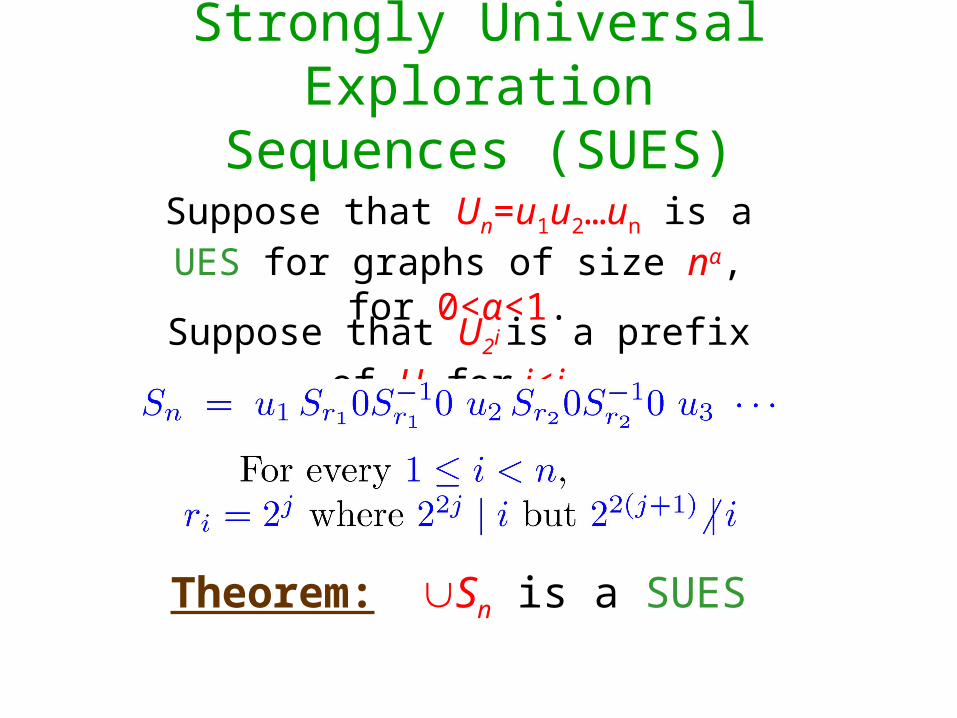
Strongly Universal ExplorationSequences (SUES)
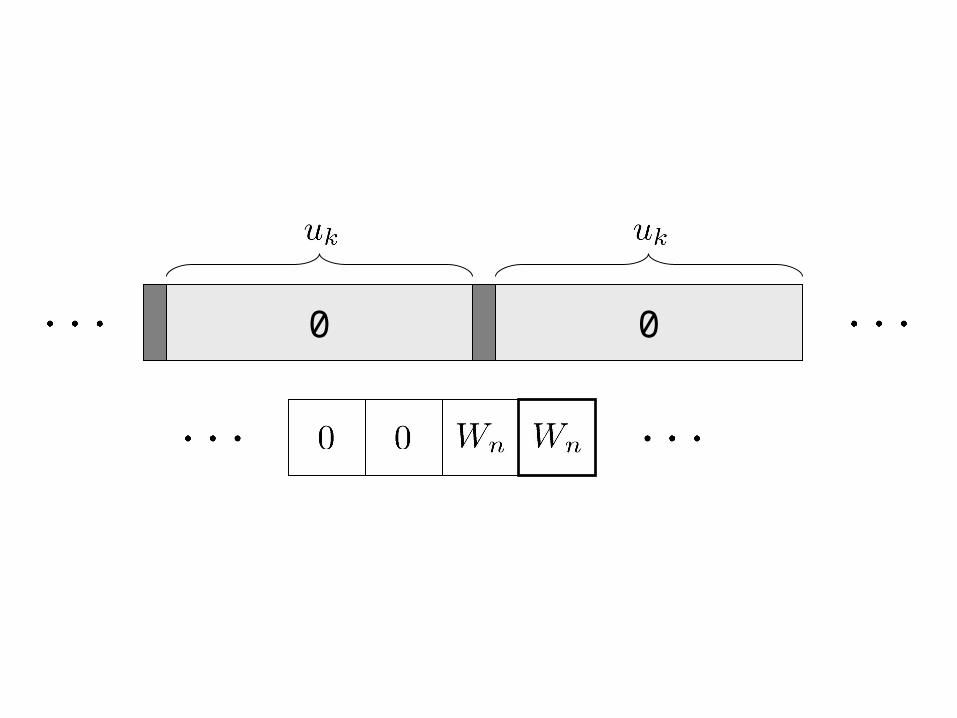
Suppose that Un=u1u2…un is a UES for graphs of size nα, for 0<α<1.
Suppose that U2i is a prefix of U2j for i<j.
Theorem: Sn is a SUES
Open problems
Strongly Universal Traversal Sequences ???
Efficient construction of Universal Traversal
Sequences ???
Solution of rendezvous problem
A robot with label uses the sequence:
0 0













![Zwick 3130 SHORE [E]](https://img.pdfslide.us/doc/110x75/619f68d33d79844e314e656b/zwick-3130-shore-e.jpg)