Embed Size (px)
Citation preview
![Page 1: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/1.jpg)
American Institute of Aeronautics and Astronautics1
A Trajectory Modeling Environment for the Study of ArrivalTraffic Delivery Accuracy
Julien Scharl, Ph. D.*
The Boeing Company, Seattle, WA, 98124
Aslaug Haraldsdottir, Ph. D. †and Ewald G. Schoemig, Ph. D.‡
The Boeing Company, Seattle, WA, 98124
This paper presents the development and preliminary results of a trajectory analysis andmodeling environment developed in MATLAB and applied to the study of the effects ofnavigation performance on arrival timing accuracy. This work supports ongoing efforts atThe Boeing Company to develop new air traffic management (ATM) concepts andprocedures based on accurate navigation standards such as Required NavigationPerformance (RNP) and Required Time of Arrival (RTA). The arrival management conceptstudied involves the use of advanced ground automation that performs sequencing andspacing based on FMS paths rather than relying on controller tactical vectoring. These pathscan be defined in three dimensions from prior to top of descent (TOD) to the meter fix andthen to the runway, potentially including speed and altitude constraints when needed andwould be communicated to the air crew via voice communication and executed to standards(e.g. RNP, RTA) by the air navigation function embedded in the Flight Management System(FMS). This concept is viewed as a transition step towards the US next generation air trafficsystem currently being studied by the Joint Planning and Development Office (JPDO).
Nomenclatureψ = heading∆XT = cross-track error∆track = track angle errora = turn anticipation distanceVg = ground speedV = calibrated air speed∆V = speed command error (Vcmd-V)Vcmd = speed command (CAS)h = altitudehcmd = commanded altitude∆h = altitude command errorANPCT = cross-track component of the navigation position errorξ = damping ratio of second order filterωn = natural frequency of second order filter∆x = along-track distance to next command (altitude or speed)SF = Scale factor used in second order filterSR = Sampling rate used in second order filter
* Lead Engineer, Modeling and Simulation, Boeing Commercial Airplanes – Avionics/Air Traffic Management† Technical Fellow, Boeing Commercial Airplanes – Avionics/Air Traffic Management‡ Associate Technical Fellow, Boeing Commercial Airplanes – Avionics/Air Traffic Management
AIAA Modeling and Simulation Technologies Conference and Exhibit21 - 24 August 2006, Keystone, Colorado
AIAA 2006-6612
Copyright © 2006 by The Boeing Company. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.
![Page 2: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/2.jpg)
American Institute of Aeronautics and Astronautics2
I. Introductionhe Boeing company, in collaboration with other stakeholders in the air transportation system, is developing newATM operational concepts for both the next generation air traffic system and the transition period leading to it.
New operational concepts, and the technical systems that are required to implement them, need to provide improvedperformance over concepts and systems in use today, and a variety of modeling and simulations tools are required toshow what performance improvements can be expected across various phases of flight1,2. The modeling environmentdescribed in this paper is designed to represent the performance of aircraft navigation in 3-dimensional space andtime adequately to be included in a model of trajectory-based air traffic planning functions that ensure safeseparation between aircraft pairs. The modeling environment must also be suitable for Monte-Carlo simulation toproduce statistically significant results in the presence of stochastic processes such as wind variation, navigationsystem characteristics and trajectory prediction errors.
The concept that forms the basis for the model development described here, the 3D-path concept, makes use ofadvanced automation available in modern cockpits today – such as the Flight Management Computers (FMC) – aswell as emerging ground automation being developed by ATM research and development institutions, and isdesigned for a 2010-2012 implementation time frame. In the 3D-path arrival management concept, groundautomation performs arrival sequencing and spacing based on paths defined in three dimensions (position, altitude,speed) rather than relying on open-ended controller tactical vectoring and clearances. The 3D-paths can be definedin three dimensions from prior to top of descent (TOD) to the meter fix and then to the runway, including speed andaltitude constraints when needed. To gain additional controllability path based clearances can be issued incombination with cruise and descent speed components, or cleared with a time representing a RTA at the TRACONboundary3.
This concept is expected to increase delivery accuracy at TRACON meter fixes and final approach fixescompared to current air traffic control practices. Delivery accuracy is defined as the ability to meet a givenscheduled time at a particular point. Delivery accuracy is typically quantified by the standard deviation of the timedifference between the scheduled arrival time and the actual arrival time of an aircraft at a particular point. Highdelivery accuracy at meter fixes and final approach fixes is strongly desired because unpredictable timing requiresair traffic controllers to apply buffers to the separation they plan for when sequencing and merging, in order tocompensate for the timing errors.
This paper concentrates on the modeling of the variability of the time of arrival at points on an aircraft’strajectory when the aircraft is navigating on a 3D-path without active time control. In the scenario reported here aproperly spaced arrival schedule has been computed and a corresponding 3D-path selected for the aircraft to follow.The variability in time of arrival at points along the 3D-path has three fundamental sources:
1) Navigation performance (lateral and vertical)2) Wind variability3) Speed profile adherence
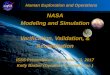
To date our modeling efforts enable us toreport on the effects of lateral navigation andwind variability in this paper. The model isapplied here to the Houston airspace where acollection of conceptual 3D arrival pathshave been designed for performanceanalysis. Figure 1 depicts the arrival pathsdesigned for Bush Intercontinental Airport(IAH). The thick orange line depicts theHouston Center (ZHU) boundary, themagenta line is the Houston TRACONboundary and the gray lines outline thestates of Texas and Louisiana. Today theairport operates with four arrival meter fixes(DAS, STROS, RIICE and GLAND), butdual arrivals in the NE and NW quadrantsare planned for the near future. Thisconceptual design introduces two additionalmeter fixes (PUMA and ROKIT) torepresent the planned additional arrival
T
-98 -97 -96 -95 -94 -93
28
28.5
29
29.5
30
30.5
31
31.5
32
32.5
Longitude, deg
Latit
ude,
deg
RIICE
PUMA
GLAND
ROKIT
DAS
STROS
Figure 1: Houston arrivals and their 3D-paths
![Page 3: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/3.jpg)
American Institute of Aeronautics and Astronautics3
gates. The path design incorporates sets of stretched paths to implement delay when necessary to ensure adequatespacing. More details on the design can be found in Ref. 4. Statistics for lateral navigation performance and actualtime of arrival (ATA) at desired points on each defined path are computed and presented in this paper.
II. Trajectory Analysis and Modeling EnvironmentThe modeling environment being developed is named the Trajectory Analysis and Modeling Environment
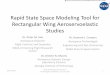
(TAME), and is implemented in MATLAB. The environment includes an easy-to-use graphical user interface whereinputs are specified and outputs are collected. A block diagram depicting the environment is included in Fig. 2.Green boxes correspond to input parameters while orange boxes depict output variables. In TAME a path is definedas the guidance reference path, i.e. the path to which an aircraft is to adhere to. This is true in three dimensions(lateral, vertical and speed); a trajectory isdefined as the outcome of navigation along apath by exercising the model, i.e. the observedflown trajectory. In TAME, paths are definedby a series of points represented by a [latitude,longitude, altitude, speed] quadruplet. Aconsecutive pair of quadruplet is defined as aleg.
TAME currently contains a trajectorymodel that includes 1) a representation ofnavigation sensor errors (NSE) tied to theaircraft’s indicated Actual NavigationPerformance (ANP) level, 2) a representationof a random time-varying wind field, 3) arepresentation of the FMS LNAV navigationmode, and 4) a representation of desiredaltitude and speed profiles that can includeefficient continuous descent approach (CDA)profiles.
At the heart of the model lies the simulation engine which implements the equations of motion and the controllaws to create simulated trajectories based on the specified reference paths. The model can be run against an airlinetraffic schedule such as the Official Airline Guide (OAG), or a user specified schedule. The model can also be run inMonte Carlo mode where multiple trajectories are produced from the same reference path under different randominputs.
A. Equations of motionThe choice for equations of motion was driven by the fidelity requirements of the model. The requirements
called for a realistic representation of lateral, vertical and speed guidance in an environment where Monte Carlosimulations could still be performed efficiently with a large traffic sample. The goal was to be able to study an entireday of traffic at a simulated speed of about 10-100 times faster than real time. For this, simple kinematic equationsof motion are typically selected5. We chose to represent motion over a spherical earth with five states (latitude,longitude, altitude, airspeed and heading). Due to the nature of the problem being studied, we required representingtwo main types of errors in the equations of motion: navigation sensor errors and random variations in wind speedand direction.
The equations of motion are integrated in MATLAB using ordinary differential equations (ODE) solvers. NativeMATLAB variable integration time step solvers such as Runge-Kutta are used, significantly reducingimplementation, testing and documentation time.
Kinematic representation of motion limits the aircraft performance model to the use of rates such as rate ofclimb/descent, rate of turn and acceleration/deceleration. In the present implementation, observed aircraftperformance is purely a function of the specified path and the guidance laws implemented. As a result, paths have tobe designed in accordance with desired aircraft performance levels. This is not a significant issue when modelingarrival traffic since most commercial aircraft have similar descent performance characteristics. However, modelingdeparture traffic will most likely require the use of aircraft performance models such as the Base of Aircraft Data(BADA)6.
Pathdefinitions
TrafficSchedule
ANPlevel
Meanwind
Windvariation
Referencepaths
SimulatedTrajectories
ATA statistics
Cross-trackError data
ObservedNavigationPerformance
Simulation Engine
Equations of Motion
Control Laws
Figure 2: Block Diagram for TAME
![Page 4: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/4.jpg)
American Institute of Aeronautics and Astronautics4
ANPE
ANPN
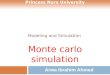
Figure 4: Navigation Sensor Error effects
B. Lateral guidance modelThe lateral guidance model represents the lateral navigation (LNAV) mode incorporated on most modern FMC.
We simplify the model by neglecting the roll dynamics and we implement a proportional control law directly onheading, as in Eq. (1).
)( 21 trackXT KK ∆+∆−=ψ& (1)
We chose gains to match those implemented in the737 roll control law at approach speed and scaled themby the ground speed so that they are applicable at otherspeeds without the need to implement gain schedules.We further limit the resulting heading rate to representacceptable limits on bank angle.
The cross-track, and track angle errors arecomputed from the reference path using great circlearithmetic. Turns are not modeled directly but occur asthe control law cycles from leg to leg on the referencepath. Leg cycling is based on a model of circular turns.Figure 3 displays an example of turn geometry. Thetransition from leg AB to leg BC is modeled by
inscribing a circle of radius determined by the maximum roll angle and the ground speed expected at B. From thisgeometry we compute the turn anticipation distance a. When the distance to point B on leg AB becomes less thanthe turn anticipation distance, the control law cycles to the next leg, in this case BC, and a turn occurs. The actualturn performed by the model will be circular only when the heading rate is at its limit and this would only occur onlarge turns. If the heading rate is not at its limit during the turn the observed turn will be an exponential path capture.To obtain more circular turns at smaller track angle changes, we actually compute the turn anticipation distancebased on a roll angle that is either half the track angle change or the maximum roll angle, whichever is smaller.
C. Vertical and speed guidance modelThe vertical and speed guidance models are implemented as control laws that guarantee to meet the altitude and
speed constraints specified in the 3D path and linearly vary the rate in-between according to Eq. (2).
g
g
Vx
VV
Vx
hh
∆∆=
∆∆=
&
&
(2)
This simple model can generate realistic altitude and speedprofiles if the actual performance is broken up in linear segmentsthat are then implemented in the modeled paths. This can be donewithout much loss of fidelity when modeling arrivals, but departureprofiles will need to be represented by an aircraft performancemodel.
III. Lateral navigation performance modelTo model the effects of lateral performance on delivery
accuracy, we developed a probabilistic model of navigationperformance. This model has two distinct parts: a model ofnavigation sensor accuracy, and a model of wind speed anddirection variations.
A
B
C
a a
Figure 3: Turn geometry
![Page 5: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/5.jpg)
American Institute of Aeronautics and Astronautics5
A. Navigation sensor accuracy modelAs can be seen in Eq. (1) the guidance law requires knowledge of the present position and the reference path to
compute the cross-track and along-track errors. In reality, present position is known with error determined by thequality of the sensor used to determine position. The metric used to represent this error is Actual NavigationPerformance (ANP) and is typically computed and displayed in the cockpit. ANP represents the radius of a circle,expressed in nautical miles, centered on the computed FMC position, where the probability of the aircraft beinginside the circle is 95%.
In a model such as TAME, the true position is actually known by integration and thus we model the FMCcomputed position from the true position. The probability distribution for containment inside the circle is based on aRayleigh (2-D) distribution. The 737 RNP manual7 cites this distribution for two modes of navigation: GPS andradio-based, as shown in Eq. (3). The one sigma value of the 1-D component of ANP (ANP1D) is obtained from Eq.(3).
displayedD
displayedD
ANPANP
ANPANP
radio
GPS
⋅=
⋅=
388.0
261.0
1
1(3)
We use these distributions to compute navigation position errors that vary in time for a given displayed ANP.We do this with a second order filter driven by white noise sized to the desired variance (DOV) via a scaling factor(SF). We choose a high damping factor and low frequency to represent a period of roughly 300 s. Unity variancenoise feeds the filter, scaled by the scaling factor (SF) presented in Eq. (4) to produce the desired output variance(DOV) obtained from the sigma value for ANP1D in Eq. (3). SR is the sampling rate at which we run the filter(typically 10 s).
SR
DOVSF
34ζω= (4)
We use two such filters to represent the time varying north and east position errors. These errors are applied tothe true position to yield the perceived position. This is the position used to compute cross-track and along-trackerrors from the reference path that feeds the lateral control law. The effect of this error on the trajectory is shown inFig. 4. In the figure, the black line represents the reference path, the triangle the perceived (FMC) position, and astar the true position. The control law sees the perceived position and thus in the picture the center trajectory resultsin the aircraft’s frame of reference. This would be the actual trajectory if there were no position error. We next lookat two cases where there is position error: one where the aircraft is actually behind and to the left of the FMCposition, and one where the aircraft is actually in front and to the right of the FMC position. In the first case (left starand trajectory) the aircraft is perceived to turn earlier than expected; in the latter case (right star and trajectory) theaircraft is perceived to turn later than expected. Note also that through a turn, the cross-track and along-trackcomponents of the position error will shift, since the actual position errors are referenced to north and east. Somecross-track component prior to the turn will be transformed to along-track after the turn, or vice-versa. The overalleffect is that turns have a detrimental effect on time of arrival statistics, since on straight segments only the alongtrack component of the position error will have an effect on timing.
If we assume in Fig. 4 that the turn is at constant ground speed and that each dash in the trajectory represents anequivalent time slice, we can observe the overall effect of turns on timing statistics. If we base time of arrival on theclosest point of approach to the apex of the turn (denoted in the picture by the green ovals), we can see a variation intime of arrival at the waypoint for all three cases represented in Fig. 4.
B. Wind variation modelRandom wind variations are introduced in the model with a process similar to that used for navigation position
error. We create time varying random wind with a second order filter driven by white noise sized to the desiredoutput variance of the wind components. We apply this to both wind speed and wind direction. We choose thefrequency to represent slowly varying wind since the response to turbulence would be under-modeled given the lackof aircraft performance representations. We achieve this via Eq. (4) with DOV sized to given wind disturbanceparameters (e.g. 5kts, six sigma). The wind components appear both in the equations of motion and the control lawsvia the ground speed, which is computed from the airspeed given the wind.
![Page 6: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/6.jpg)
American Institute of Aeronautics and Astronautics6
0 0.2 0.4 0.6 0.8 1 1.2 1.40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
ANP, nm
ON
P,n
m
No random wind
5kts, 5deg @ 6σ10kts, 10deg @ 6σ
Radio Navigation
GPS Navigation
Figure 5: Effect of ANP and random wind on ONP
C. Lateral navigation performance metricTo capture lateral navigation performance (as a function of navigation sensor accuracy and wind disturbances)
we use a metric derived from the observed statistics of cross-track error along a trajectory. We omit turns from thiscomputation since there is no reference turn in our model. We pick the 97.5% point on the empirical cumulativedistribution of this cross-track error, representing the value of cross-track error that the aircraft is guaranteed to bewithin with 95% confidence. This we call the observed navigation performance (ONP), which is equivalent to thedefinition of RNP. We assume that cross-track error is normally distributed, and we verify this assumption onsample simulations. In other words, if as a result of a simulation ONP is calculated to be 0.3nm, then we can say thatthe aircraft flew a trajectory at an equivalent RNP level 0.3nm.
D. Timing metricWe compute time of arrival at a point from the trajectory after a simulation. Because we utilize variable time
step integration, the state output is not equally spaced in time. The Actual Time of Arrival (ATA) at a point isdetermined by:
1) Computing the distance to the point for each time stamped positions in the state output2) Determining the closest point of approach (CPA) to the point of interest3) Fitting a cubic spline (distance vs. time) over the portion of the data that includes five previous and five
following positions around the CPA4) Finding the minimum of the spline as a function of timeWe repeat this process for each point on the reference path and each of the Monte Carlo simulation, yielding
statistics for time of arrival at any chosen point. We expect that ATA is normally distributed and we check for thatassumption. We use the standard deviation of ATA at a point as the delivery accuracy metric for that point.
IV. Effects on ONPIn the first study conducted with TAME we sought out to discover the relationship between navigation position
error, random wind and ONP. In other words, what combination of ANP errors and random winds yield a particularONP. This is done so that we can quote timing statistics as function of RNP values by selecting values for ANP andwind variations that yield theequivalent navigationperformance. This relationship isrepresented for a given path after1000 Monte Carlo simulations inFig. 5. We quickly observe thatwind variations have little effecton ONP. This implies that thelateral control law is very goodat compensating for wind whichis expected considering we arenot modeling turbulence. Thereare two parts to the curve, onefor GPS navigation (at andbelow ANP=0.2nm) and one forradio navigation (aboveANP=0.2nm), corresponding toEq. 3. The ANP shown in Fig. 5is the displayed ANP. The bluesquare at ANP=0 is the ONPvalue for a run with no wind andno navigation error. Thisrepresents the “perfect” case andgives an indication of the performance of the lateral guidance model alone on straight segments. The non-zero valueis due to the fact that although we omit turns in the ONP computation based on the turn model of Fig. 3, theguidance model actually has more residual error after the turn than a pure fixed heading rate turn since it is based onproportional cross-track and track angle errors.
![Page 7: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/7.jpg)
American Institute of Aeronautics and Astronautics7
1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
12
Waypoint Number
σA
TA
,s
1
3
68 9 10
1113
ANP=0.15nmANP=0.3nmANP=0.7nm
MF
FAF
Figure 6: Effect of ANP on timing statistics, RIICE arrival
1 2 3 4 5 6 7 8 9 10 11 12 130
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Waypoint Number
σA
TA
,s
1
79
11
ANP=0.15nmANP=0.3nmANP=0.7nm
MF
FAF
Figure 7: Effect of ANP on timing statistics, DAS arrival
V. Effects on timingWe performed Monte Carlo simulations with various ANP levels and various wind variation conditions on selectedpaths to investigate the effects of such errors on timing accuracy. Although wind variation does not have anappreciable effect on lateral navigation performance, it does have a significant effect on timing through the along-track component of the wind variation errors.
A. Effects of ANPWe used two different arrival paths
to study the variation of ATA statisticsat each waypoint with various levels ofANP. The first path is the nominalRIICE northwest arrival when theairport is landing to the west; thisconfiguration requires a downwindsegment, as illustrated in the Fig. 6 inset.The second path is the nominal DASnortheast arrival path under the samecondition; this configuration is a“straight-in” approach, as Fig. 7 shows.Figure 6 plots the effect of ANP ondelivery accuracy for the RIICE arrivalwith no random wind present. The ANPvalue of 0.15nm corresponds to GPSoperations; the two other valuescorrespond to radio navigation. Asshown and as is expected, degrading theposition error results in lower timingaccuracy. We also observe that thedelivery accuracy quickly degradesthrough large turns and tends toaccumulate along the trajectory. Thisalso seems to be more pronounced if thespeed and/or altitude is varying duringthe turns such as for example in thetrombone region of the trajectory (points10 and 11 in Fig. 6). This is expectedsince the speed (and altitude) rates aredetermined based on along trackdistance to the speed or altitudereference point (by Eq. (2)), whichcarries position error.
On this nominal RIICE arrival, themeter fix is point number 6 and the finalapproach fix is point number 13. For atypical GPS ANP of 0.15nm, weobserve a timing accuracy at the meter
fix of 0.14s and at the final approach fix of 1.48s. Compare this with the results of Fig. 7 along the DAS arrival path.We observe that the delivery statistics are much better on the DAS path. Delivery accuracy seems to be about threetimes better, with a ANP=0.15nm value at the meter fix (point 7) of 0.1s and at the final approach fix (point 11) of0.5s. The two paths are of the same length (285nm) but they have a significantly different number of turns and turnangles. Upon slowing down below 10,000ft and within the TRACON we also observe large jumps in deliveryaccuracy, as explained earlier for the trombone turn region.
It is worth noting again that these trajectories were flown without a reference path during turns and we expectthese statistics to be better in the case where fixed radius RNP turns (“RF legs”) can be flown. Improvements in themodel to account for this increased accuracy are planned. Considering the effects of turns, we also investigated paths
![Page 8: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/8.jpg)
American Institute of Aeronautics and Astronautics8
1 2 3 4 5 6 7 8 9 10 11 12 130
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Waypoint Number
σA
TA
,s
5 kts, 5 deg @ 6σ10 kts, 10 deg @ 6σ15 kts, 15 deg @ 6σ
MF FAF
Figure 8: Effect of random wind variations on timing statistics– DAS arrival
that include path stretching in centerairspace to investigate what loss of meterfix delivery accuracy can be expectedfrom flying the stretched paths ascompared to flying the nominal paths.We observed a jump of 0.19s at the meterfix for the RIICE arrival and 0.41s for theDAS arrival and this error carriesthrough to the final approach fix.
B. Effects of windThe effect of wind variation on
timing (without ANP) is exemplified forthe nominal DAS arrival in Fig. 8. Thelateral path inset has been taken out ofthe picture to view more of the data. Wenote that the effect of random wind isflatter across the entire trajectoryalthough turns still have an effect as isexpected since the component of
headwind will change during turns for a given wind speed and direction. Also, since the wind variation is takenaround a mean wind of zero speed and northern direction, the effect of the variation is expected to be greater forpaths that fly more in a northerly (or southerly direction). For the DAS path we note that the effect of wind ontiming is larger than that of ANP alone, but that this reduces on the final since the approach is in a westerlydirection.
C. Combined Effects of Navigation Accuracy and WindAll meter fix and final approach fix delivery accuracies are presented as function of wind and ANP levels in Fig. 9.Since wind does not affect the lateral performance level to a significant degree, there is a one to one relationshipbetween ANP and ONP, and thus by extension ANP and RNP. Figure 9 gives us the relationship we were seeking,that is the relationship between a given lateral navigation performance level, wind and timing statistics. Therelationships are as expected, that is increases in wind variability and in navigation position error both degradedelivery accuracy. We note that for a given wind condition, position error (ANP) has a larger effect on the finalapproach delivery accuracy than the meter fix delivery accuracy. This is due to the fact that we have a constant
0 1 2 30
1
2
3
4MF accuracy , RIICE arrival
Wind Condition
σA
TA
,s
0 1 2 30
2
4
6
8
10
12FAF accuracy , RIICE arrival
σA
TA
,s
Wind Condition
0 1 2 30
1
2
3
4MF accuracy , DAS arrival
σA
TA
,s
Wind Condition0 1 2 3
0
1
2
3
4FAF accuracy , DAS arrival
σA
TA
,s
Wind Condition
ANP 0.15
ANP 0.3
ANP 0.7
Wind Conditions:0: No Wind1: 5kts, 5deg @6σ2: 10kts,10deg @6σ3: 15kts,15deg @6σ
Figure 9: Meter Fix and Final Approach Fix Delivery Accuracy for Two Arrivals
![Page 9: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/9.jpg)
American Institute of Aeronautics and Astronautics9
speed descent (280kts CAS) to the meter fix with little or no turns and that in the TRACON we have large speedgradients (from 250kts CAS at the meter fix to 130kts CAS at the final approach fix) over a small distance. ThisANP effect in the TRACON is even more pronounced in trajectories that involve downwind segments as isexemplified here by the difference in final approach fix delivery accuracy between the RIICE arrival and the DASarrival.
VI. ConclusionsThis paper presents a modeling environment (TAME) designed to study the benefits of concepts such as the
Boeing 3D-path concept, with the current focus being its application in the arrival management domain. The fidelityof the model provides a good balance between the accuracy of the simulated trajectories and the need for fast-timeexecution of large arrival schedules and Monte Carlo simulations.
Application of the model to arrival paths designed for the Houston airspace provides a relationship betweenlateral navigation performance and arrival delivery accuracy at key locations in the airspace. We show that deliveryaccuracy is strongly dependent on the number, direction, and magnitude of turns in the arrival procedure, due to thecombined effects of navigation position uncertainty and variations in the wind field. This implies that the geometryof arrival paths strongly affects the expected delivery accuracy, even with good lateral navigation performance andlow wind variability. We show for example that TRACON arrival paths involving a downwind segment havesignificantly lower delivery accuracies at the final approach fixes than straight-in approaches. We also discoveredthat stretched arrival paths in center airspace degrade meter fix delivery accuracy by as much as 1s. Overall, afterrunning the model on this path design we have observed delivery errors that do not exceed 3s at the meter fix and 6sat the final approach fix in a random wind field of 10kts and 10deg (six sigma), and at an average lateral navigationperformance corresponding to a 0.2nm RNP level, which represents normal operations for this near-term concept.As noted above, the introduction of fixed radius turns in the FMC guidance path is likely to significantly reduce theeffect of turns on timing accuracy. Furthermore, we note that the execution of arrival paths with active time control(e.g. with the aircraft RTA function) can reduce the effect of the wind variation. Provided the FMC is loaded withup-to-date and accurate wind information, a significant portion of the effect of wind variation on timing can thus bemitigated. Future studies with a model including fixed radius turns and the airborne RTA function are planned.
Separate analyses conducted at Boeing on the expected airport capacity benefits of this concept8 assume finalapproach delivery accuracy improvements from 16s to 12s. Our results show that the execution alone of 3D-paths isnot expected to be more than 6s at the final approach fix, which is well within the assumed range. However, a part ofthe delivery accuracy that is not accounted for here is the variability in the overall arrival management process.Models of the arrival traffic planning function are currently being developed for inclusion within TAME that cancapture this effect. This more complete environment will enable a study of throughput and delay improvements thatcan be obtained with this arrival management concept for given levels of navigation performance as well astrajectory prediction and scheduling process performance, thereby validating the assumptions made in Ref. 8.
AcknowledgmentsThe authors would like to acknowledge the significant contribution of Rolan Shomber to the navigation
modeling work reported in this paper. Len Anderson contributed to the development of the trajectory model and, andMichael Coats assisted with testing. Dan Boyle and Kwok-On Tong were instrumental in the analysis and design ofHouston area airspace and procedures. David Frame, FAA Houston Center, and David Svedberg, FAA HoustonTRACON, have provided significant insight into Houston air traffic operations, and the FAA ATO and ATACCorporation provided sample radar track data that formed the basis for the arrival path designs used in this work.
References1Haraldsdottir, A., Schwab, R. W., Shakarian A., Wood G., and Krishnamachari, R. S., 2001, “ATM Operational Concepts
and Technical Performance Requirements,” New Concepts and Methods in Air Traffic Management, Bianco, L., Dell’Olmo, P.,and Odoni, A.R., Editors, Transportation Analysis, Springer Verlag, Berlin, pp. 63-74.
2Schwab, R. W., Haraldsdottir A., Kostiuk P., Simpson, R. W., Wright R., Wiseman R., et al., 2000, “A Preliminary DesignProcess for Airspace Systems, Initial Assessment – Chicago Case Study,” Report Prepared for NASA Ames Research Center,Department of Transportation Report No. VNTSC-DTS20-PDP-001.
3Haraldsdottir, A., Berge, M. E., Boyle, D. A., Kang, L. S., Schoemig, E. G., and Tong, K., “Required NavigationPerformance and 3D Paths in High-Traffic Terminal and En Route Operations – Concept and Benefits,” IEEE Digital AvionicsSystems Conference, Portland, 2006 (to be published)
![Page 10: [American Institute of Aeronautics and Astronautics AIAA Modeling and Simulation Technologies Conference and Exhibit - Keystone, Colorado ()] AIAA Modeling and Simulation Technologies](https://reader040.pdfslide.us/reader040/viewer/2022020615/5750952d1a28abbf6bbf93dc/html5/page/10.jpg)
American Institute of Aeronautics and Astronautics10
4Schoemig, E. G., Boyle, D. A., Haraldsdottir A., Scharl J., and Tong, K., “Application of Required Navigation Performancein High-Traffic Conditions for Houston Airspace,” AIAA Aviation Technology, Integration, and Operations Conference, 2006 (tobe published)
5Bilimoria, K., Sridhar B., Chatterji G., Sheth K., and Grabbe, S., “FACET: Future ATM Concepts Evaluation Tool”, ThirdUSA/Europe Air Traffic Management R&D Seminar, Napoli, Italy, 2000.
6Nuic, A., Iagaru, M.-G., Gallo, E., Navarro, F. A., and Querejeta, C., “Advanced Aircraft Performance Modeling For ATM:Enhancements to the BADA Model,” IEEE Digital Avionics Systems Conference, Washington D.C., 2005
7 “RNP Capability of FMC Equipped 737, Generation 3”, Boeing D6-39067-3, 2002.
8Alcabin, M., Berge, M. E., Coats, M. L., Kang, L. S., and Schwab, R. W., “Airport Capacity and NAS-Wide Delay BenefitsAssessment of Near-Term Operational Concepts,” AIAA Aviation Technology, Integration, and Operations Conference, 2006 (tobe published)