Embed Size (px)
Citation preview

1
Running Head: Methods for studying stratification 1
2
Title: Alternative methods for studying stratification dynamics on discrete and continuous time 3
scales 4
5
Katherine Hudson, Northeastern University, Marine and Environmental Sciences, 430 Nahant 6
Road, Nahant, MA 01908 7
8

2
Abstract 9
Stratification is an important driver for many biological and ecological processes across 10
benthic and pelagic habitats in the world ocean. However, stratification dynamics are still 11
undersampled due to limitations of current methods. Current methodologies rely primarily on 12
CTD and Niskin bottle data to develop stratification profiles, that are then compared over time. 13
Here, we describe two new methodologies which utilize remote sensing technologies for 14
examining stratification dynamics on discrete and continuous time scales. The first, focusing on 15
thin layers and zooplankton distributions in the water column, utilizes a Remotely Operated 16
Vehicle (OpenROV version 2.8) to record vertical transects in discrete time using a low-power 17
lens placed periodically over an HD imager. The second utilizes a customizable mooring system 18
and thermistor strings to continuously observe stratification as well as dynamic phenomena such 19
as internal waves. Using these methods, physical phenomena such as internal waves and thin 20
layers were observed with the continuous and discrete methods, respectively. These 21
methodologies allow for the observation of stratification dynamics on a variety of time and 22
spatial scales. A model was constructed in R to examine the effects of perturbations of the 23
stratified layer on downwelling that could have consequences for deeper-water pelagic and 24
benthic organisms. Understanding stratification dynamics and their impacts on water column 25
biota and the benthos across temporal and spatial scales will become increasingly important as 26
climate change impacts the dynamics of the surface layer of the world ocean. 27
Key Words: stratification, dynamics, zooplankton population dynamics, remote sensing, 28
temporal scales, internal waves, thin layers 29
Introduction 30

3
The stratification of the water column, or the distribution of bodies of water according to 31
their relative densities, has been shown to impact physical and biological phenomena throughout 32
the world ocean (Li 2002; Leichter et al. 1996; Wang et al. 2007). Changes in stratification 33
dynamics have been shown to influence species distributions, drive physical events in the water 34
column, and even influence events such as hurricanes and tropical cyclones above the ocean 35
(Greer et al. 2014; Butman et al. 2006b; Kunze et al. 2002; Holligan et al. 1985) 36
Despite the importance of stratification dynamics to species distributions across the world 37
ocean, stratification dynamics remain poorly sampled (Eickstedt et al. 2007). Sampling of ocean 38
stratification primarily occurs with CTDs, a group of ocean instruments capable of measuring 39
conductivity, temperature, and depth (Thompson and Emery 2014). These instruments can be 40
used to construct discrete temperature, salinity, and density profiles as a function of depth 41
(Thompson and Emery 2014). Data from CTD casts have been used previously to construct 42
reliable, long-term time series datasets that describe the seasonal changes in water column 43
structure and stratification (Steinberg et al. 2001). These data have been extremely influential to 44
describing the ocean circulation system present throughout the world ocean (Steinberg et al. 45
2001). However, these measurements are discrete (Thomson and Emery 2014). As a result, the 46
data they can collect are ultimately limited by their sampling frequency (Thomson and Emery 47
2014). 48
For example, the Bermuda Institute of Ocean Sciences (formally the Bermuda Biological 49
Research Station) has been following this sampling regime since 1954 with the development of 50
the Bermuda Atlantic Time-Series (BATS) study (Steinberg et al. 2001). While the data 51
collected at BATS is extremely valuable and has resulted in a wide-range of publications, the 52
sampling frequency of approximately once a month limits the researchers and scientists from 53

4
drawing concrete conclusions on what occurs at the study locations, or extrapolating those 54
results, on small time scales (Doney et al. 1996; Thompson and Emery 2014). 55
Currently, there are very few methods available for collecting data on continuous time 56
scales. One of the most popular of these are temporary mooring systems that can be deployed 57
with instrumentation specific to the needs of the researcher and the questions at hand (Butman et 58
al. 2006a). Such mooring systems have been used to study physical and biological phenomena 59
such as internal waves in Stellwagen Bank and harmful algal blooms in the Gulf of Maine 60
(Butman et al. 2006a, K. Hudson, pers. obs.). Instrument platforms and underwater vehicles, 61
autonomous or otherwise, have also been deployed to collect continuous data on the world ocean 62
(Eriksen et al. 2001). However, these systems are often only deployed for a single season and are 63
difficult to recover in inclement conditions (Pillsbury et al. 1969). 64
Another significant limitation to current stratification sampling methods is the cost of 65
instrumentation and ship time (Eriksen et al. 2001). CTD instruments, often included with 66
sampling bottle arrays, cost thousands of dollars, depending on the depth rating of the instrument 67
(Thompson and Emery 2014). Instruments capable of taking continuous measurements range can 68
cost upwards of $5,000 (Pillsbury et al. 1969). Research cruises to collect these data and deploy 69
the necessary instruments also can cost as much as $25,000 per day at sea (K. Hudson, pers. 70
obs). The high costs of both instruments and ship time often make up a significant portion of 71
grant budgets. Therefore, there is a significant need to develop relatively low-cost 72
instrumentation that can produce high quality and reliable data. 73
This study aims to address this need for data to be produced on a continuous time scale 74
and be relatively low cost when compared to traditional methods. Using northern Massachusetts 75
Bay as a study site, moorings like those used to study internal waves off Stellwagen Bank were 76

5
constructed (Butman et al. 2006). These moorings included thermistor strings of Onset HOBO 77
temperature loggers, low-cost temperature loggers ranging between $50 - $200 per device. 78
Inspired by the Massachusetts Bay Internal Wave Experiment in 1998 and work by John Witman 79
in the Gulf of Maine, three moorings were deployed off Nahant, MA and Rockport, MA to 80
observe stratification dynamics, including internal wave phenomena, during the summer months 81
of 2016 (Butman et al. 2006; Witman et al. 1993; Witman et al. 2004). 82
Internal waves occur in stratified waters and propagate along the stratification boundary 83
(Haury et al. 1979). They are formed by a disturbance in this boundary layer, which is usually 84
created by the movement of water due to tides over a large geographic feature, such as a ridge or 85
seamount (Haury et al. 1979; Helfrich and Melville 2006). These phenomena, in addition to 86
other stratification processes, have been shown to have significant impacts on plankton 87
distributions throughout the water column and can induce downwelling events (Lai et al. 2010; 88
Scotti and Pineda 2007; Shanks 1983; Witman et al. 1993). 89
In addition, an open-source remotely operate vehicle (ROV) by OpenROV was used to 90
make visual observations of zooplankton. Using the HD imager aboard the ROV and a 91
magnifying lens placed in front of the lens, the OpenROV v. 2.8 was deployed to observe how 92
zooplankton are impacted by stratification dynamics. Although this is technically discrete 93
method of observing plankton dynamics in response to changes in stratification dynamics, it is 94
hypothesized that the collaboration of these technologies provides a more holistic view of 95
stratification dynamics and their overall ecological impacts in northern Massachusetts Bay. 96
Methods 97
Continuous Observations – Thermistor String Mooring System 98

6
To continuously measure stratification dynamics, vertical moorings were constructed in 99
the spring of 2016. Moorings were constructed to hold HOBO thermistor strings and allow for 100
simple and quick recovery, data download, and redeployment. Three moorings were constructed 101
to accommodate deployment water column depths of approximately 30, 80, and 50 m. The top 102
and bottom 6 m of these moorings consisted of ¾-inch braided line to accommodate added stress 103
from the buoys and anchors. One-ft diameter Norway buoys were used through the testing phase. 104
When deployed in Rockport, these buoys were paired with 10 m of line between them in the 105
event one buoy was lost. Anchors were constructed from recycled brake pads with the line 106
looped through the center of the brake pad and passing the other end of the line through the eye 107
splice. When deployed in Nahant, only one anchor was used and weighed approximately 60 lbs. 108
In Rockport, anchors were deployed in pairs and weighed a cumulative 80 lbs to reduce the risk 109
of dragging. The remaining line between the buoy and anchor was 1/4-inch braided line. Each 110
line had an eye splice at each end, which contained a metal thimble of the appropriate diameter. 111
Sections of the mooring system were attached using ½-inch shackles. The buoys were attached to 112
the gear using a whale-friendly break away swivel (weak link), that has a breaking strength of 113
600 lbs. 114
The thermistor string was constructed using woven strap material with a width of 1 inch. 115
The strap was cut to be equal to the length of the ¼-inch line section of the mooring. When the 116
length required exceeded the length of the strap available in a single unit, sections of strap were 117
connected with bowline knots. HOBO Water Temperature Pro V2 temperature loggers were 118
connected to the line using 1-inch S-clips by making a small incision in the strap material and 119
passing one end of the clip through this incision. The other clip was passed through the eye of 120
the temperature logger. Temperature loggers were placed on the strap every five meters between 121

7
10 and 50 meters and programmed to record water temperature every minute. If the mooring 122
length exceeded 50 meters, loggers were placed every 10 meters after 50 meters. 123
To facilitate the recovery of the thermistor string without pulling the entire mooring up, a 124
5-lb dive weight was attached to the bottom of the thermistor string. A two-meter chain was 125
attached to the bottom of the string using a carabiner clip that was tied to the end of the strap 126
using a bowline knot. This chain added additional weight to the string and was wrapped around 127
the 1/4-inch line to allow the thermistor string to be pulled up without removing the entire 128
mooring system. Another carabiner clip was used to attach the top of the thermistor string to the 129
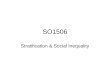
shackle at the top of the ¼-inch line. Figure 1 illustrates the instrumented mooring system. 130
Upon recovery of the thermistor string, data were uploaded to a computer using a HOBO 131
Base Station and saved using HOBOware Pro for later analysis in the R programming 132
environment. Analysis included visual interpretation of water column structure to see if events 133
such as internal waves or water column turn-over could be observed. A Fast Fourier Transform 134
(FFT) followed by a power spectral density analysis using data that were Hanning-windowed 135
was performed in Mathematica to test for the presence of periodic events such as internal waves 136
and tidal currents. A handheld CTD (YSI CastAway) was cast three times at the mooring 137
location at each recovery to collect water temperature, salinity, and density data. These data were 138
used in the calculation of a mean Brunt-Väisälä frequency to determine if physical phenomena 139
such as internal waves could occur under the stratification present at the time of the observations. 140
The mooring rated to 30 m was deployed off East Point, Nahant, MA in early May 2016 141
(Figure 2a). This mooring served as the test for the later deployments of two moorings off 142
Rockport, MA and was used to make improvements to the overall mooring system. One full 143
recovery of the entire system was made in May 2016 and four data recoveries were made 144

8
between May and July to collect the data from the temperature loggers, for a total of five 145
recoveries. An attempt to relocate this mooring to Rockport, MA in August 2016 was 146
unsuccessful. The remaining two moorings were deployed off Rockport, MA in August 2016 147
(Figure 2b). One of these moorings, in addition to the mooring design described above, also 148
included an InterOcean S4 electromagnetic current meter at the base (Figure 1). An attempt to 149
recover the moorings was made in October 2016 was unsuccessful. During the search, numerous 150
minke whales were observed surfacing in the vicinity of the mooring site, and it is suspected that 151
whale feeding activity resulted in break off of the swivel attached to the mooring buoy. 152
Mathematical Model of Internal Wave Induced Downwelling on Benthic Communities 153
A spatially-explicit, two-patch model was constructed to model the effects of internal 154
wave induced downwelling (IWID) on benthic communities. The first patch represented the 155
pelagic environment while the second represented the benthic environment. The pelagic patch 156
consisted of a single equation determining the abundance of plankton in the pelagic zone, while 157
the benthic patch consisted of two equations outlining plankton and consumer abundances. The 158
equations describing the abundances of the plankton populations were based on a continuous 159
logistic growth model, with parameters added for loss due to mortality, consumption, and the 160
effects of IWID. For the benthic consumer, the equation was based on a Rosenzweig-MacArthur 161
model for predator populations, with a density-dependent term added for mortality: 162
𝑑𝑃1
𝑑𝑡 = 𝑟1𝑃1 (1 −
𝑃1
𝐾1) − 𝑃1𝑦 − 𝑑𝑃1 (Eq. 1) 163
𝑑𝑃2
𝑑𝑡 = 𝑟2𝑃2 (1 −
𝑃2
𝐾2) −
𝑃2𝑎𝑁
(1+(𝑎+ℎ+𝑃2))+ 𝑑𝑃1 (Eq. 2) 164
𝑑𝑁
𝑑𝑡 =
𝑃2𝑎𝑏𝑁
(1+(𝑎+ℎ+𝑃2))− 𝑚𝑁 (Eq. 3) 165

9
where Pi is the abundances of pelagic and benthic plankton, respectively, and N is the abundance 166
of the benthic consumer. In Eqs. 1 and 2, ri and Ki are the intrinsic rates of growth and carrying 167
capacities of the pelagic and benthic plankton populations, respectively. The growth rates for the 168
pelagic and benthic plankton were equal to 0.75 and 0.30, while the carrying capacities were 169
equal to 20 and 5, respectively (Eqs. 1-2). General mortality and predation of the pelagic 170
plankton was represented by y = 0.2 (Eq. 1). The pelagic plankton population (𝑃1) in the pelagic 171
patch of the equation was given a higher rate of growth (𝑟1) and carrying capacity (𝐾1) than the 172
populations in the benthic patch due to the increased light availability. The benthic plankton 173
population (𝑃2) was given a lower rate of growth (𝑟2) and carrying capacity (𝐾2) due to 174
decreased light availability at depth. These values were not equal to zero due to the nutrient 175
availability at depth, which would have stimulated some growth. Pelagic plankton were given a 176
low mortality term (y) due to the high productivity that would be occurring during the summer 177
months, when internal waves would be propagating through this system. 178
Attack rate, handling time, and efficiency of the benthic consumer were equal to a = 0.5, 179
h = 0.2, and b = 0.75, respectively (Eq. 3). Mortality of the benthic consumer was represented by 180
m = 0.75 (Eq. 3). These parameters were chosen to compensate for the fact that successful 181
benthic consumers would need to consume high quantities of plankton to have enough energies 182
for their respective functions. Thus, the consumers were made to be highly efficient, with low 183
handling times and high attack rates. In addition, benthic consumers were given a high mortality 184
to compensate for the high competition for resources at depth. 185
The effect of IWID is represented by d and is calculated using the following equation: 186
𝑑 = 𝑃1 (0.5 (𝐷 sin (𝜏2𝜋 (𝑡
𝑚𝑎𝑥𝑇𝑖𝑚𝑒)))) (Eq. 4) 187

10
Where D is the relative strength of the IWID event, 𝜏 is the frequency of the event, t is the time 188
step, and maxTime is the total time that the model run was simulated during the experiments 189
(Eq. 4). A for loop was used to keep all values of this equation at or above zero, to account for 190
periods in which IWID is not occurring. In the experiments, these parameters were set to D = 191
0.25, 𝜏 = 2, and maxTime = 1000 (Eq. 4). The time step was determined by the deSolve function 192
in the R programming environment. 193
This model assumes that all plankton populations are general populations consisting of 194
both phytoplankton and zooplankton. Intraguild predation on phytoplankton by zooplankton was 195
assumed to be negligible over the time scale of the simulations which are comparable to internal 196
wave perturbations (O(hours)). It was assumed that benthic consumers were generic, non-197
specialized consumers and that competition between consumers was negligible. This model also 198
assumed that benthic consumers were only consuming benthic plankton populations. Detritus 199
inputs were not considered for this model. 200
In an R programming environment, in silico experiments were conducted with the model 201
described above, testing how benthic communities in this model were dependent on IWID and 202
how they responded to changes in downwelling intensity and frequency, both independently and 203
in conjunction with each other. The first experiment tested the dependency of the benthic 204
consumer on IWID events by simulating the model in the presence and absence of IWID. 205
Absence of IWID events was simulated by setting D = 0. Using the deSolve function in R, 206
twenty simulations were conducted with 1000 time steps each. 207
Discrete Observations – ROV imaging of plankton and particulates 208
An OpenROV v. 2.8 was used to conduct vertical video transects (Figure 3). The 209
OpenROV v. 2.8 was constructed in July 2016 according to kit instructions supplied by the 210

11
manufacturer. A 100 m neutrally buoyant tether was used during deployments. In addition, 211
external light cubes (high intensity LEDS) and an Inertial Motion Unit (IMU), purchased from 212
OpenROV, were added to the constructed OpenROV v. 2.8, according to kit instructions. 213
For this study, a magnifying lens was attached to the external surface of the electronics 214
chamber and positioned so that the HD imager of the OpenROV v. 2.8 would look through the 215
lens when in its down-most position. The support for this lens was designed in SolidWorks 216
(Dussault) and 3D-printed to securely hold the lens in place against the electronics housing. This 217
support was designed to fit snugly against the curvature of the housing and included a small hole 218
on both the top and bottom to allow for air to escape from behind the lens while deployed. To 219
allow the lens to be removed for cleaning, the lens support connects to two additional supports 220
that are mounted directly to the electronics housing. The lens support is attached to these 221
supplemental supports using a screw on each side. The lens support is described in Figure 4 and, 222
with the current configuration, the lens has a magnification of approximately 2 times. 223
Vertical transects were made with the camera positioned to look through the lens to 224
visualize zooplankton. Identifications were attempted when possible. Video was recorded using 225
the screen record function in Quick Time Player on the computer used for control of the ROV, an 226
Apple MacBook Pro. Three screenshots were taken at each half meter from the maximum depth 227
to the surface. The number of zooplankton and particulates observed in each screenshot was 228
counted using the Cell Counter plug-in in ImageJ (NIH). Particulate counts were square-root 229
transformed and regressed in a linear model against depth in R. A handheld CTD (YSI 230
CastAway) was deployed after the deployment to collect data on stratification. 231
Results 232
Continuous Observations– Thermistor String Mooring System 233

12
Although all three moorings were lost during the summer of 2016, the test mooring 234
deployed at approximately 30 m off East Point, Nahant observed a variety of stratification 235
dynamics both graphically and numerically. Temperatures off East Point ranged between 236
approximately 5 and nearly 20 degrees C over the course of the deployment period with 237
stratification increasing into July. The transition from a uniform to stratified water column can be 238
seen, especially in early June, where there are multiple instances of mixing, resulting in 239
temperature being uniform across depths. 240
On multiple occasions, there were concurrent increases or decreases in temperature 241
across the mid-depths (15 – 25 m) and an example of these events from May 14, 2016 is 242
presented in Figure 5. A spectral analysis of these data indicates that some of these oscillations 243
occur with a period of one to two hours at these same depths (Figure 6). In addition, in the FFT 244
analysis, oscillations were observed that occurred with approximately 12 hour periods (Figure 6). 245
Mathematical Model of Internal Wave Induced Downwelling on Benthic Communities 246
While data could not be collected to validate or parameterize the IWID model, model 247
simulations showed that generalist communities could be dependent on IWID events. The 248
absence of IWID events lead to the extinction of local populations, while populations fluctuated 249
but persisted in response to IWID events when present (Figure 7). 250
Discrete Observations – ROV imaging of plankton and particulates 251
Several vertical transects with the OpenROV v. 2.8 were made in mid-February 2017. 252
These transects were conducted in the same location at the mooring test site (Figure 1) to locate 253
this mooring. While the search-and-rescue mission was unsuccessful, the vertical video transects 254
from depth to the surface indicated a strong relationship with particulate matter and depth 255
(Figure 7). When these variables were linearly regressed, a strong, significant relationship was 256

13
observed (p << 0.001, R2 = 0.8035). Particulate counts increased significantly with depth, 257
ranging from as little as 4 to 1000 particulates observed (Figure 8). This increase correlated with 258
a thermocline that was observed in the corresponding CTD cast (Figure 8). In addition, seeming 259
local areas (> 0.5 m) of high and low densities of particulate matter were observed in the vertical 260
transect, particularly below the thermocline observed by the CTD cast (Figure 8). Individual 261
plankton were not able to be identified during this transect, although an abundance of larval fish 262
were observed near the bottom. 263
Discussion 264
Continuous Observations 265
While all three moorings constructed to record stratification dynamics on a continuous, 266
long-term scale were eventually lost, one mooring was successfully able to observe internal wave 267
phenomena occurring off East Point, Nahant. These events can be seen in the time series data 268
from the mooring site by concurrent, rapid changes in water temperature at 15, 20, and 25 m 269
depths, an example of which is shown in Figure 5. These events, as shown by the FFT analysis, 270
occur approximately every two hours, which equivalent to the expected frequency of internal 271
waves as seen in other systems (Figure 6) (Scotti et al. 2007; Scotti et al. 2008). The internal 272
waves, according to the data presented here, appear to occur within one to two hours of the high 273
or low tide (Figure 5), indicating that these waves are tidally generated. These waves are most 274
likely traveling from the location where they are generated from to East Point, although the exact 275
direction of the wave is unknown due to the single time point available. It is possible, due to the 276
relative shallowness of the East Point site, in comparison to other locations where internal waves 277
have been observed previously, that the internal waves are shoaling, or breaking, at East Point. 278

14
These shoaling events have been shown to cause local downwelling-events, which can 279
have significant impacts on the benthic communities (Witman et al. 1993; Lai et al. 2010). The 280
theoretical model created in conjunction with the field deployments demonstrated that under the 281
correct conditions that benthic communities could be highly dependent on these internal wave-282
induced downwelling effects and that this dependency can change depending on the frequency 283
and intensity of the events (Figure 7). Further sampling is necessary, however, to properly 284
parameterize the model to the stratification dynamics present at East Point. 285
Previous research has shown that, in addition to the effects internal waves have on the 286
benthic community through their shoaling, the internal waves that are propagating around East 287
Point may have a significant impact on the pelagic communities (Pineda et al. 2015; Scotti and 288
Pineda 2007; Greer et al. 2014). Internal waves have been shown to have significant effects on 289
the distribution of plankton in the water column in a variety of systems (Pineda et al. 2015; Scotti 290
and Pineda 2007; Greer et al. 2014). 291
To determine the directionality of the internal waves and their impact on the benthic and 292
pelagic communities, significantly more sampling is need in this area. A redeployment of a 293
reconstructed mooring system will help describe the directionality of the wave. In addition, in 294
situ pelagic and benthic sampling, either by traditional methods such as Niskin bottle sampling 295
and diver surveys of pelagic and benthic communities, respectively, or the OpenROV v. 2.8 and 296
lens design described above, will help describe the impact these waves have on the biological 297
communities. Sampling of the benthic community along with increased descriptions of the 298
internal waves that occur in this area will also help to strengthen the IWID model. 299
Discrete Observations 300

15
A vertical transect with the OpenROV v. 2.8 detected a significant increase in particulate 301
matter with depth in late February and a corresponding CTD cast observed a thermocline at 302
approximately 10m during this cast (Figure 8). This relationship was expected because many of 303
these particulates were aggregates of particulate matter, most likely consisting of dead plankton 304
and fecal pellets (MacIntyre 1995). These aggregates have been shown to sink to depth as they 305
gain mass, thus more were expected at depth (MacIntyre 1995). While aggregates such as these 306
have been observed, and photographed in situ previously, this is one of the first observations, to 307
our knowledge, to be made using an ROV such as the OpenROV v. 2.8. 308
In addition to the strong linear relationship observed between particulate matter and 309
depth, possible thin layers were observed in the vertical transect. An example of these can be 310
seen in the variance from the regression line between 5 and 10 m and at 15 m in Figure 8. Thin 311
layers are, as the name suggests, layers of plankton aggregates that occur on small spatial scales, 312
usually ranging between 0.5 m and 1 m in size, vertically (Sullivan et al. 2010). These 313
phenomena can occur on very large spatial scales in the horizontal direction and have also been 314
observed on a variety of temporal scales, ranging from hours to days (Sullivan et al. 2010). Thin 315
layers, formed by small-scale physical processes and water column stratification, have been 316
shown to have an important impact on pelagic communities throughout the food web (Clay et al. 317
2004; McManus et al. 2003). More observations are required to determine if the variances in 318
particulate matter distribution seen in this vertical transect are in fact thin layers and not natural 319
variances in particulates throughout the water column. 320
Limitations of both observation systems 321
While both observation methods were successful individually, they each have their 322
drawbacks. The mooring systems, in addition to being easily lost at sea, only have, at their 323

16
maximum, a 5 m resolution, making them incapable of measuring small scale processes such as 324
thin layers. In addition, the moorings are limited to the depths for which they were constructed 325
(30, 50, and 80 m). Although the current modular design allows sections to be added or replaced 326
with longer or shorter segments, this incurs an additional cost. The moorings are also limited by 327
their ability to store data. The HOBO water temperature v2 probes purchased for this study and 328
set to a sampling frequency of one sample per minute can only be deployed for 33 days before 329
they need to be recovered and the data uploaded. The S4 current meter, when deployed at the 330
sampling rate of one sample every four minutes, similarly, only has enough memory for a two-331
week deployment. Therefore, constant data recovery is necessary for an accurate and complete 332
time series using these systems. 333
In contrast, the OpenROV v. 2.8, which can instantly record data at much smaller spatial 334
scales, is limited primarily by the time scale at which it can sample. Although the OpenROV v. 335
2.8 is easy to deploy and manipulate in the water column under low current conditions, it can 336
only record data in discrete time. It is not suitable for long deployments. Another major 337
limitation of this sampling method is that it is limited by weather. The OpenROV v. 2.8 is 338
difficult to deploy and manipulate in rough seas or high current conditions. High currents also 339
make visualization of plankton through the magnification lens difficult, especially on screenshots 340
of the resulting video. 341
With the current design of the lens, it was also not possible to magnify observed plankton 342
and particulate matter to the correct size for identification. A second lens may help increase 343
magnification. In addition, more light in the form of more external light cubes or other light 344
sources, may help increase identifications. 345

17
Overall, there is no best method for the observation of stratification methods. However, 346
using both discrete and continuous methods in conjunction with each other to make observations 347
on a variety of temporal and spatial scales provides the most holistic view of stratification. 348
Through both the continuous and discrete methods, we observed both large (internal waves) and 349
small scale (thin layers) physical phenomena that are directly related to stratification dynamics as 350
well as seasonal changes in stratification through the summer months. 351
Understanding stratification on a variety of scales is essential to not only a greater 352
understanding of the world ocean but also critical for a more holistic view of the physical 353
processes that govern the distribution of marine species. Phenomena such as internal waves and 354
thin layers have been shown to have significant impacts on the distribution of plankton, which in 355
turn can impact the distributions of species that consume the plankton (Pineda et al. 2015; Clay 356
et al. 2004). 357
Since stratification is mostly governed by changes in water temperature, global climate 358
change will have a significant impact on stratification regimes world-wide in the coming years. 359
Models are already predicting that changes in surface temperatures and salinity, resulting from 360
increased glacial melt, will have significant impacts on stratification in nearly all the ocean 361
basins (Capotondi et al. 2012). Since stratification is one of the major drivers of the ocean 362
circulation system, this will have a significant impact on biological and physical systems 363
throughout the world ocean. 364
Acknowledgements 365
This work was funded by the Northeastern University Office of the Provost’s Advanced 366
Research/Creative Endeavors Award, Beta Beta Beta Biological Honors Society Research Grant, 367
and the Field Robotics Laboratory at Northeastern University’s Marine Science Center (MSC). 368

18
Special thanks to Dr. Tarik Gouhier for serving on the committee for this work and his assistance 369
in developing the IWID model; Drs. Brian Helmuth and Loretta Fernandez for also serving on 370
the committee for this work; the MSC’s 2016 Summer Internship program; the Grabowski lab 371
for assisting in mooring design and the donation of materials; Lydia Sylla for the construction of 372
the OpenROV v. 2.8; Ethan Edson for his support in the field and designing and 3D printing the 373
lens support; and the rest of the Field Robotics Laboratory, the MSC community, and Three Seas 374
31 for their assistance, support, and inspiration for this work. 375

19
Literature Cited 376
Butman, B., P. S. Alexander, S. P. Anderson, F. L. Lightsom, A. Scotti, and R.C. Beardsley. 377
2006. The Massachusetts Bay internal wave experiment, August 1998; Data Report: U.S. 378
Geological Survey Data Series 85, Version 2.0, DVD-ROM. 379
Butman, B., P. S. Alexander, A. Scotti, R. C. Beardsley, and S. P. Anderson. 2006. Large 380
internal waves in Massachusetts Bay transport sediments offshore. Continental Shelf 381
Research 26:2029–2049. 382
Capotondi, A., M. A. Alexander, N. A. Bond, E. N. Curchitser, and J. D. Scott. (2012). Enhanced 383
upper ocean stratification with climate change in the CMIP3 models. Journal of 384
Geophysical Research: Oceans 117(C4). 385
Clay, T. W., S. M. Bollens, A. B. Bochdansky, and T. R. Ignoffo. 2004. The effects of thin layers 386
on the vertical distribution of larval Pacific herring, Clupea pallasi. Journal of 387
Experimental Marine Biology and Ecology 305: 171-189. 388
Doney, S. C., M. D. Glover, and R. G. Najjar. 1996. A new coupled, one-dimensional biological-389
physical model for the upper ocean: Applications to the JGOFS Bermuda Atlantic Time-390
series Study (BATS) site. Deep Sea Research Part II: Topical Studies in 391
Oceanography 43:591-624. 392
Eickstedt, D. P., M. R. Benjamin, and J. Curcio. 2007. Behavior based adaptive control for 393
autonomous oceanographic sampling. In Robotics and Automation, 2007 IEEE 394
International Conference 4245-4250. 395
Eriksen, C. C., T. J. Osse, R. D. Light, T. Wen, T. W. Lehman, P. L. Sabin, J. W. Ballard, and A. 396
M. Chiodi. 2001. Seaglider: a long-range autonomous underwater vehicle for 397
oceanographic research. IEEE Journal of Oceanic Engineering 26:424 - 436. 398

20
Greer, A. T., R. K. Cowen, C. M. Guigand, J. A. Hare, and D. Tang. 2014. The role of internal 399
waves in larval fish interactions with potential predators and prey. Proceedings in 400
Oceanography 127:47-61. 401
Haury, L. R. M. G. Briscoe, and M. H. Orr. 1979. Tidally generated internal wave packets in 402
Massachusetts Bay. Nature 278:312-317. 403
Helfrich, K. R. and W. K. Melville. 2006. Long nonlinear internal waves. Annual Review of 404
Fluid Mechanics 38:395-425. 405
Holligan, P. M., R. D. Pingree, and G. T. Mardell. 1985. Oceanic solitons, nutrient pulses and 406
phytoplankton growth. Nature 314:348-350. 407
Kunze, E., L. K. Rosenfeld, G. S. Carter, and M. C. Gregg. 2002. Internal waves in Monterey 408
submarine canyon. Journal of Physical Oceanography 32:1890-1913. 409
Lai, Z., C. Chen, R. C. Beardsley, B. Rothschild, and R. Tian. 2010. Impact of high-frequency 410
nonlinear internal waves on plankton dynamics in Massachusetts Bay. Journal of Marine 411
Research 68:259-281. 412
Leichter, J. J., S. R. Wing, S. L. Miller, and M. W. Denny. 1996. Pulsed delivery of 413
subthermocline water to Conch Reef (Florida Keys) by internal tidal bores. Limnology 414
and Oceanography 41:1490-1501. 415
Li, W. K. W. 2002. Macroecological patterns of phytoplankton in the northwestern North 416
Atlantic Ocean. Nature 419:154-157. 417
MacIntyre, S., A. L. Alldredge, and C. C. Gotschalk. 1995. Accumulation of marine snow at 418
density discontinuities in the water column. Oceanography 40:449 – 468. 419
McManus, M. A., A. L. Alldredge, A. H. Barnard, E. Boss, J. F. Case, T. J. Cowles, P. L. 420
Donaghay, L. B. Eisner, D. J. Gifford, C. F. Greenlaw, C. M. Herren, D. V. Holliday, D. 421

21
Johnson, S. MacIntyre, D. M. McGehee, T. R. Osborn, M. J. Perry, R. E. Pieper, J. E. B. 422
Rines, D. C. Smith, J. M. Sullivan, M. K. Talbot, M. S. Twardowski, A. Weidemann, and 423
J. R. Zaneveld. 2003. Characteristics, distribution and persistence of thin layers over a 48 424
hour period. Marine Ecology-Progress Series 261:1-19. 425
Pillsbury, D., R. L. Smith, and R. C. Tipper. 1969. A reliable low‐cost mooring system for 426
oceanographic instrumentation. Limnology and Oceanography 14:307-311. 427
Pineda, J., V. Starczak, J. C. Silva, K. Helfrich, M. Thompson, and D. Wiley. 2015. Whales and 428
waves: Humpback whale foraging response and the shoaling of internal waves at 429
Stellwagen Bank. Journal of Geophysical Research: Oceans 120:2555-2570. 430
Scotti A. and J. Pineda. 2007. Plankton accumulation and transport in propagating nonlinear 431
internal fronts. Journal of Marine Research 65:117-145. 432
Scotti, A., R.C. Beardsley, and B. Butman. 2007. Generation and propagation of nonlinear 433
internal waves in Massachusetts Bay. Journal of Geophysical Research 112:C10001 434
Scotti, A., R. C. Beardsley, B. Butman, and J. Pineda. 2008. Shoaling of nonlinear internal waves 435
in Massachusetts Bay. Journal of Geophysical Research 113:C08031 436
Shanks, A. L. 1983. Surface slicks associated with tidally forced internal waves may transport 437
pelagic larvae of benthic invertebrates and fishes shoreward. Marine ecology progress 438
series. Oldendorf 13:311-315. 439
Sullivan, J. M., D. Van Holliday, M. McFarland, M. A. McManus, O. M. Cheriton, K. J. Benoit-440
Bird, L. Goodman, Z. Wang, J. P. Ryan, M. Stacey, and C. Greenlaw. 2010. Layered 441
organization in the coastal ocean: An introduction to planktonic thin layers and the 442
LOCO project. Continental Shelf Research 30: 1. 443

22
Steinberg, D. K., C.A. Carlson, N. R. Bates, R. J. Johnson, A. F. Michaels, and A. H. Knap. 444
2001. Overview of the US JGOFS Bermuda Atlantic Time-series Study (BATS): a 445
decade-scale look at ocean biology and biogeochemistry. Deep Sea Research Part II: 446
Topical Studies in Oceanography 48:1405-1447. 447
Thomson, R. E., and W. J. Emery. 2014. Chapter 1: Data Acquisition and Recording. In: Data 448
analysis methods in physical oceanography. Newnes. 449
Witman, J. D., J. J. Leichter, S. J. Genovese, and D. A. Brooks. 1993. Pulsed phytoplankton 450
supply to the rocky subtidal zone: influence of internal waves. Proceedings of the 451
National Academy of Sciences 90:1686-1690. 452
Witman, J. D., M. R. Patterson, and S. J. Genovese. 2004. Benthic–pelagic linkages in subtidal 453
communities: influence of food subsidy by internal waves. Pages 133-153 in G. A. Polis, 454
M. E. Power, and G. R. Huxel, editors. Food Webs at the Landscape Level. The 455
University of Chicago Press, Chicago. 456
Wang, Y. H., C. F. Dai, and Y. Y. Chen. 2007. Physical and ecological processes of internal 457
waves on an isolated reef ecosystem in the South China Sea. Geophysical Research 458
Letters 34:L18609. 459

23
Figure Legends 460
Figure 1. General design of moorings and thermistor strings used in this study, indicating the 461
primary location of HOBO V2 Water Temperature Pro temperature loggers and InterOcean S4 462
electromagnetc current meter, when deployed. 463
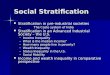
Figure 2. Map indicating locations of moorings at (A) the test site off East Point, Nahant, MA 464
and (B) the study site at Rockport, MA. 465
Figure 3. A photo of the OpenROV v. 2.8 used in this study with external light cubes mounted 466
laterally. 467
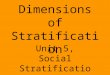
Figure 4. Design of lens mount attached to OpenROV v. 2.8 for the visualization of zooplankton 468
and particulate matter with (A) indicating the front (facing the water) of the lens mount and (B) 469
indicating the back (facing the ROV) with grey areas indicating cuts into the mount made to (a) 470
support the lens and (b) allow air and/or water to escape from behind the lens during 471
deployment. The removable lens support was attached to the permanent side supports using a 472
screw on each side. 473
Figure 5. (A) Water column structure and fluctuations between May 11, 2016 and August 27, 474
2016 as a function of depth. (B) An example of stratification dynamics on the short-term scale 475
from May 14, 2016 with high tide at 6:12 and 18:56 and low tide at 12:30. 476
Figure 6. Power spectral density plot of temperature oscillations between May 11 and 19, 2016. 477
Figure 7. (A) Internal wave induced downwelling model results for systems with and without 478
IWID events with P1 representing pelagic plankton populations, P2 representing benthic 479
plankton populations, and N representing benthic consumer populations. (B) Mean pelagic (P1) 480
and benthic (P2) plankton and benthic consumer (N) populations in 1000 step simulations across 481
different IWID event frequencies (tau) and intensities. 482

24
Figure 8. Particulates counted in vertical transect using the OpenROV v. 2.8 as a function of 483
depth. The blue horizontal line indicates the thermocline location as determined by a CTD cast. 484
The red line indicates the significant linear regression model between the two variables (p << 485
0.001, R2 = 0.8035). 486

25
Figures 487
488
Figure 1. 489

26
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
Figure 2. 506
A.
B.
1
2
3

27
507
Figure 3. 508

28
509
Figure 4. 510
A.
B.
a.
b.
Permanently
mounted side
support
b.
Removable
lens support
Permanently
mounted side
support

29
511
512
513
514
515
516
517
518
519
520
521
Figure 5. 522
A.
B.

30
523
Figure 6. 524
525

31
526
527
Figure 7. 528
0 200 400 600 800 1000
02
040
60
80
10
0
Time
Abu
nd
ance
P1
P2
N
0 200 400 600 800 10000
20
40
60
80
10
0
Time
Abu
nd
ance
A.
B.

32
529
Figure 8. 530