Embed Size (px)
Citation preview
Algorithms for Control and Algorithms for Control and Interaction of Large Formations Interaction of Large Formations
of Robotsof Robots
Ross MeadRoss Mead
Dr. Jerry B. WeinbergDr. Jerry B. Weinberg
Dr. William WhiteDr. William White
IntroductionIntroduction
In April 2000, NSF and NASA met to In April 2000, NSF and NASA met to discuss harvesting solar power in space to discuss harvesting solar power in space to help meet future energy needs.help meet future energy needs.
IntroductionIntroduction
One solution that received considerable One solution that received considerable attention was the use of robots to form a solar attention was the use of robots to form a solar reflector.reflector.
Imagine the space shuttle releasing thousands Imagine the space shuttle releasing thousands of robots, each with a piece of reflector attached of robots, each with a piece of reflector attached to them.to them.
These robots then navigate themselves to form These robots then navigate themselves to form a large parabolic structure resembling a a large parabolic structure resembling a reflector, which is then used to harvest solar reflector, which is then used to harvest solar energy.energy.
IntroductionIntroduction
How can this How can this swarmswarm, or massive collection , or massive collection that moves with no group organization, that moves with no group organization, coordinate to form an organized, global coordinate to form an organized, global structure, or structure, or formationformation??
Once organized, how can this formation Once organized, how can this formation be effectively controlled? be effectively controlled?
BackgroundBackground
This approach to the autonomous control of This approach to the autonomous control of creating and maintaining multi-robot formations creating and maintaining multi-robot formations is similar to work done in coordinating formations is similar to work done in coordinating formations of Earth-bound, mobile robots.of Earth-bound, mobile robots. Fredslund & Mataric 2002Fredslund & Mataric 2002 Balch & Arkin 1998Balch & Arkin 1998
This work has been inspired by biological or This work has been inspired by biological or organizational systems, such as geese flying in organizational systems, such as geese flying in formation.formation.
BackgroundBackground
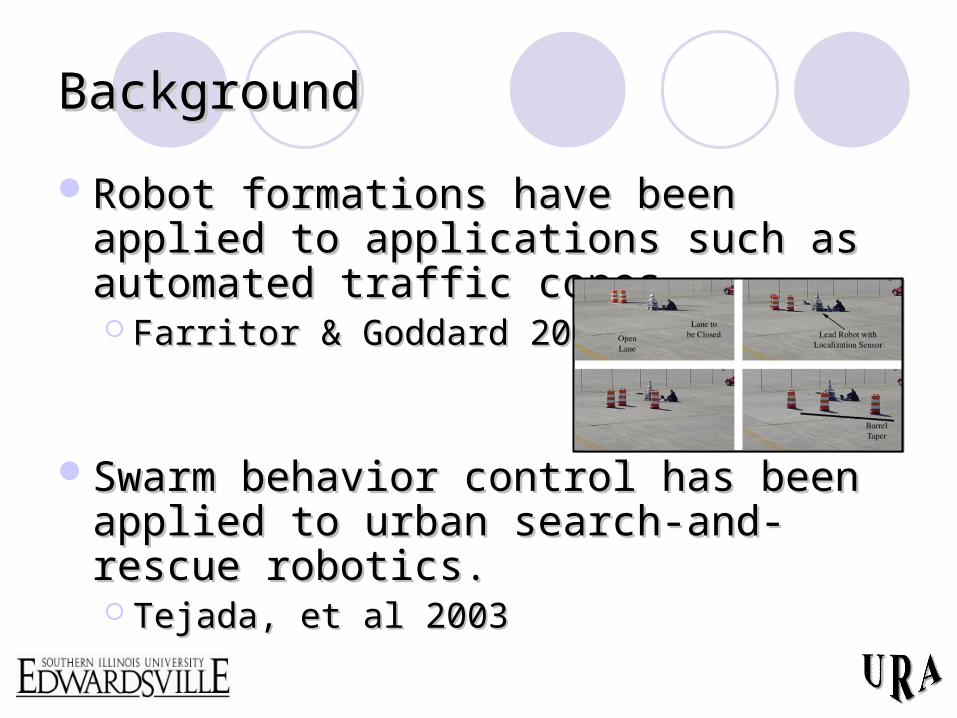
Robot formations have been applied to Robot formations have been applied to applications such as automated traffic applications such as automated traffic cones.cones. Farritor & Goddard 2004Farritor & Goddard 2004
Swarm behavior control has been applied Swarm behavior control has been applied to urban search-and-rescue robotics.to urban search-and-rescue robotics. Tejada, et al 2003Tejada, et al 2003
BackgroundBackground
The current work on robot formations The current work on robot formations requires units have some sense of where requires units have some sense of where they belong and who their neighbors are they belong and who their neighbors are supposed to be.supposed to be.
One of the goals of this project is to One of the goals of this project is to generalize the need for this information or generalize the need for this information or at least create it more dynamically as the at least create it more dynamically as the swarm becomes a formation and as the swarm becomes a formation and as the formation adjusts its pattern.formation adjusts its pattern.
Formation ControlFormation Control
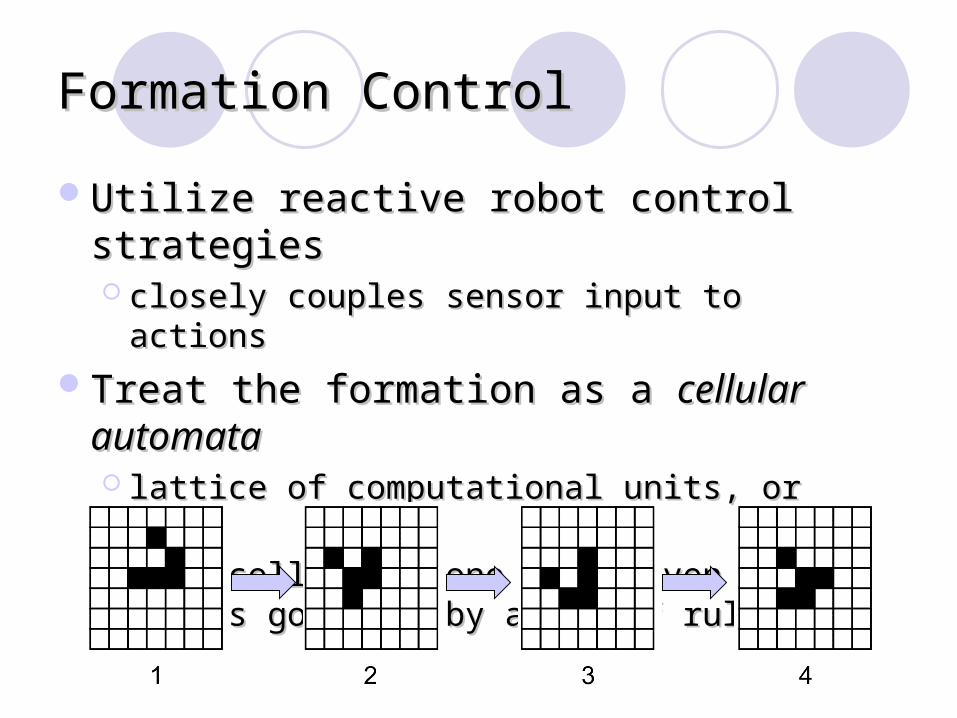
Utilize reactive robot control strategiesUtilize reactive robot control strategies closely couples sensor input to actionsclosely couples sensor input to actions
Treat the formation as a Treat the formation as a cellular automatacellular automata lattice of computational units, or cellslattice of computational units, or cells each cell is in one of a given set of states each cell is in one of a given set of states
governed by a set of rulesgoverned by a set of rules
Formation ControlFormation Control
A command that indicates the geometric A command that indicates the geometric formation is sent to a formation is sent to a seedseed robot. robot.
The formation then transforms as the other The formation then transforms as the other robots react to changes in their neighbors robots react to changes in their neighbors to attain their calculated relationship based to attain their calculated relationship based on the formation definition. on the formation definition.
A desired formation, A desired formation, FF, is defined as a , is defined as a geometric description (i.e., mathematical geometric description (i.e., mathematical function).function). FF ← y = ax ← y = ax22, where , where aa is some constant is some constant
Formation ControlFormation Control
F ← y = ax2
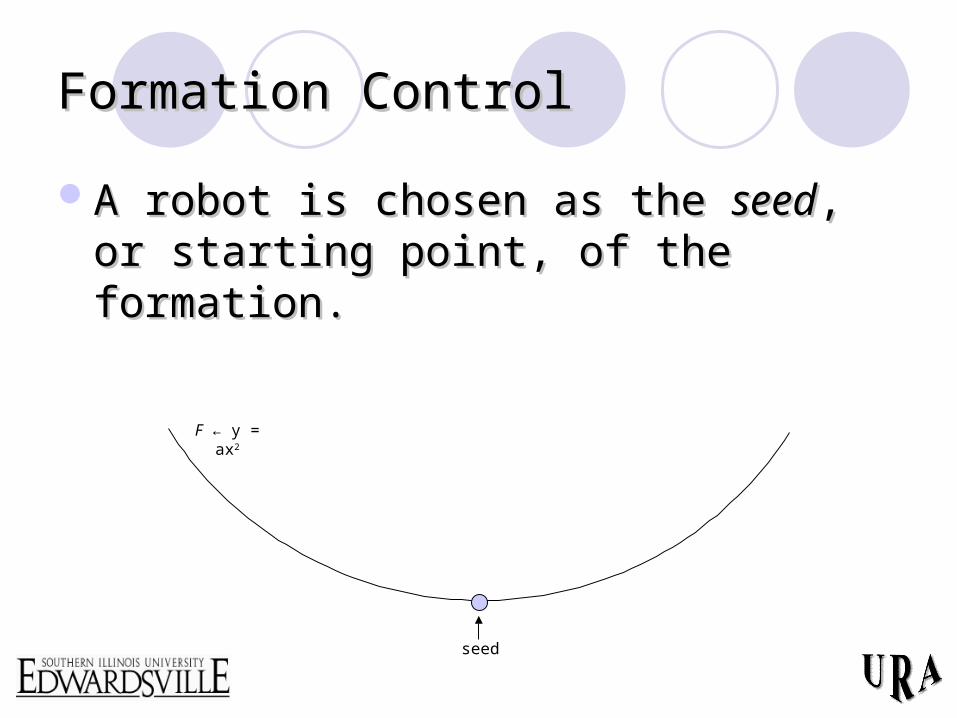
A robot is chosen as the A robot is chosen as the seedseed, or starting , or starting point, of the formation.point, of the formation.
Formation ControlFormation Control
F ← y = ax2
seed
Formation ControlFormation Control
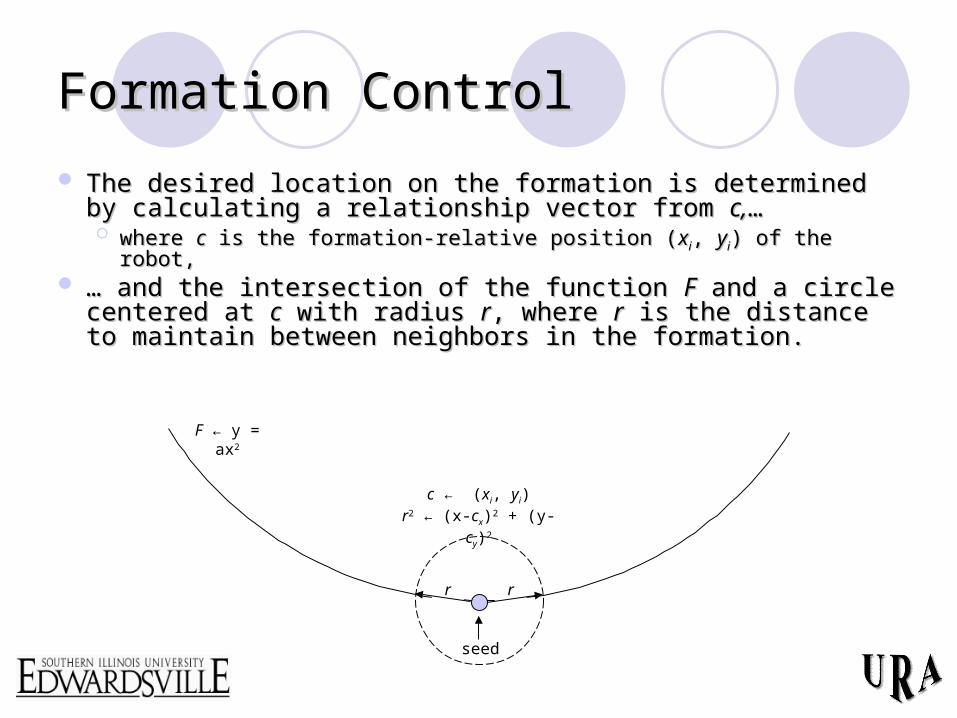
The desired location on the formation is determined by The desired location on the formation is determined by calculating a relationship vector from calculating a relationship vector from c,c,…… where where cc is the formation-relative position ( is the formation-relative position (xxii, , yyii) of the robot,) of the robot,
… … and the intersection of the function and the intersection of the function FF and a circle and a circle centered at centered at cc with radius with radius rr, where , where rr is the distance to is the distance to maintain between neighbors in the formation.maintain between neighbors in the formation.
c ← (xi, yi)r2 ← (x-cx)2 + (y-cy)2
F ← y = ax2
r r
seed
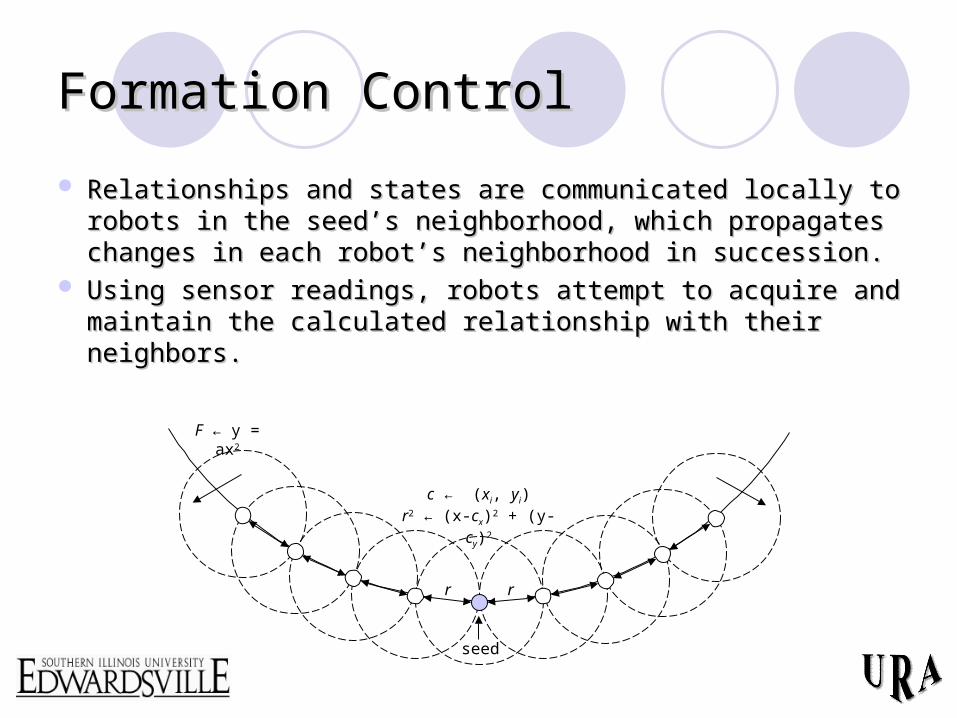
Relationships and states are communicated locally to Relationships and states are communicated locally to robots in the seed’s neighborhood, which propagates robots in the seed’s neighborhood, which propagates changes in each robot’s neighborhood in succession.changes in each robot’s neighborhood in succession.
Using sensor readings, robots attempt to acquire and Using sensor readings, robots attempt to acquire and maintain the calculated relationship with their neighbors.maintain the calculated relationship with their neighbors.
Formation ControlFormation Control
c ← (xi, yi)r2 ← (x-cx)2 + (y-cy)2
F ← y = ax2
r r
seed
c ← (xi, yi)r2 ← (x-cx)2 + (y-cy)2
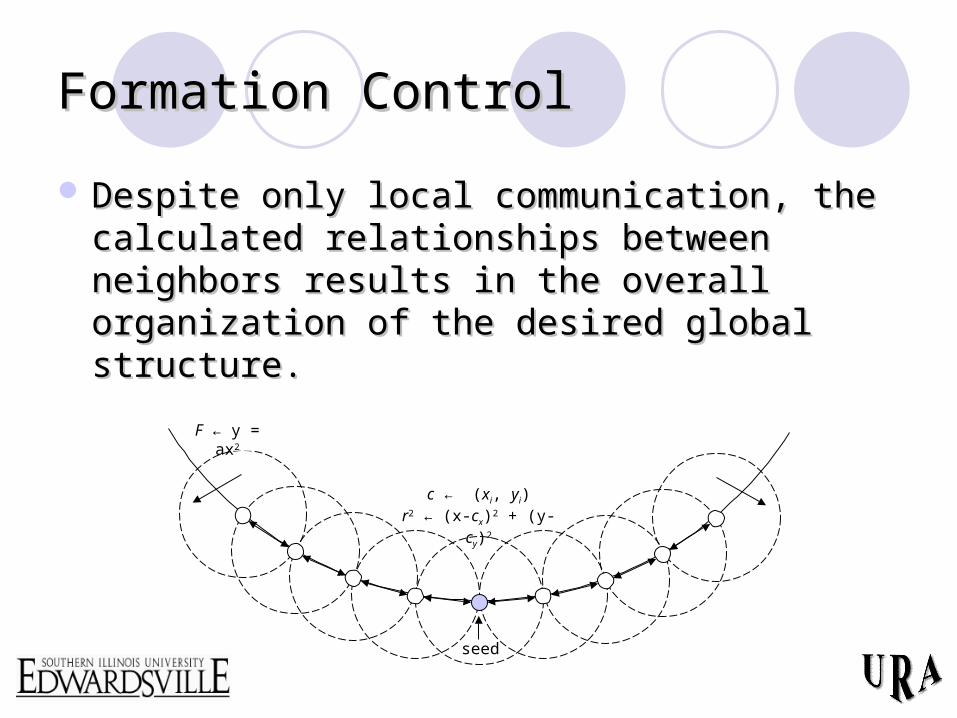
Despite only local communication, the calculated Despite only local communication, the calculated relationships between neighbors results in the relationships between neighbors results in the overall organization of the desired global overall organization of the desired global structure.structure.
Formation ControlFormation Control
F ← y = ax2
seed
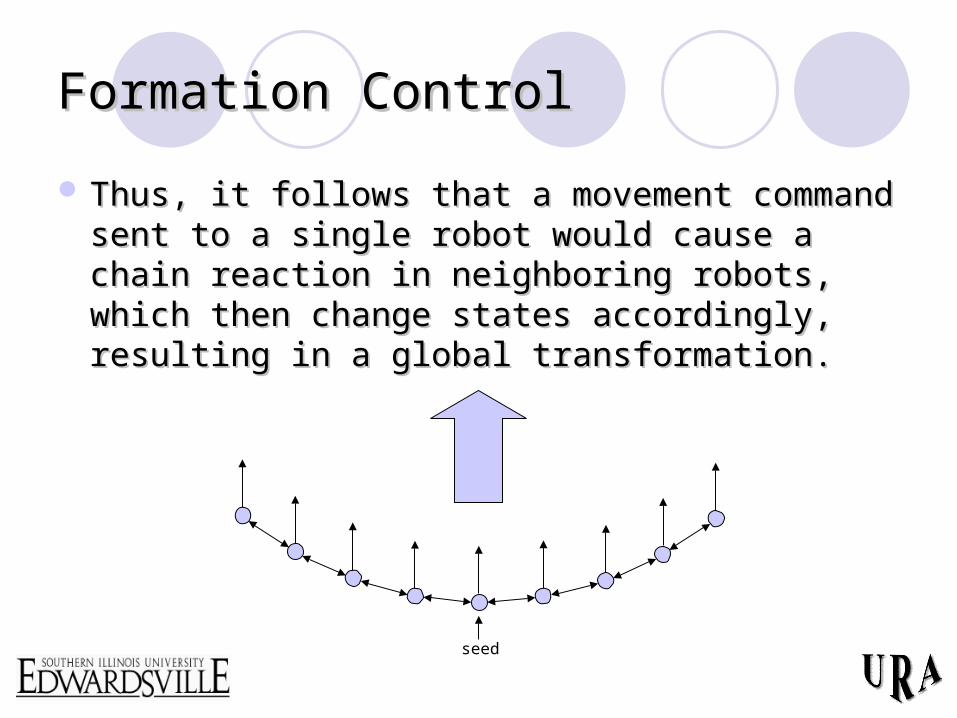
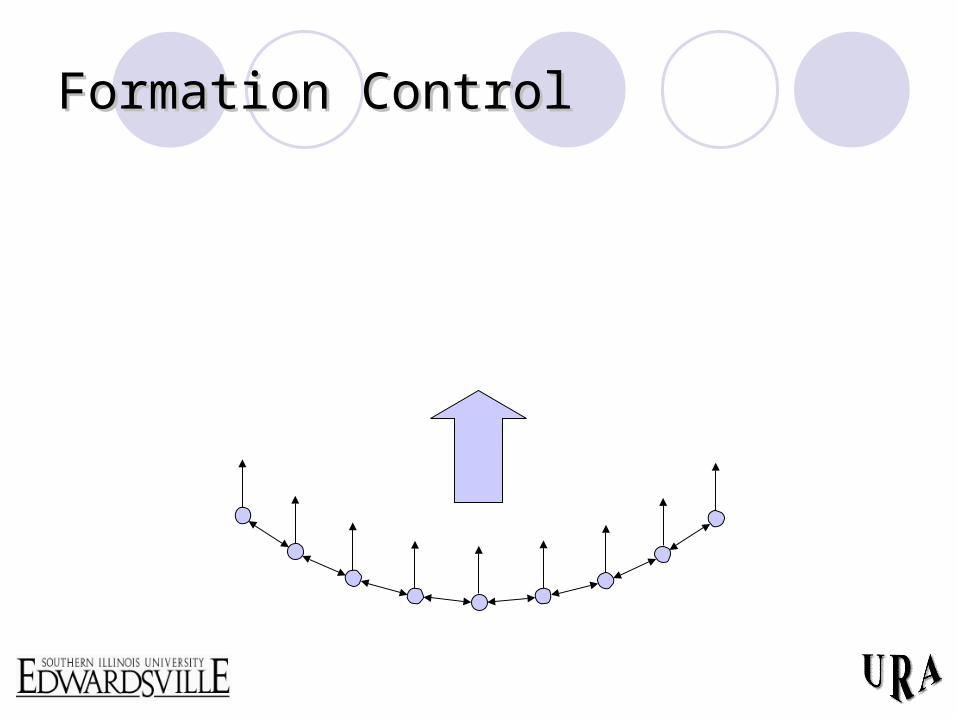
Thus, it follows that a movement command sent Thus, it follows that a movement command sent to a single robot would cause a chain reaction in to a single robot would cause a chain reaction in neighboring robots, which then change states neighboring robots, which then change states accordingly, resulting in a global transformation.accordingly, resulting in a global transformation.
Formation ControlFormation Control
seed
Formation ControlFormation Control
Formation ControlFormation Control
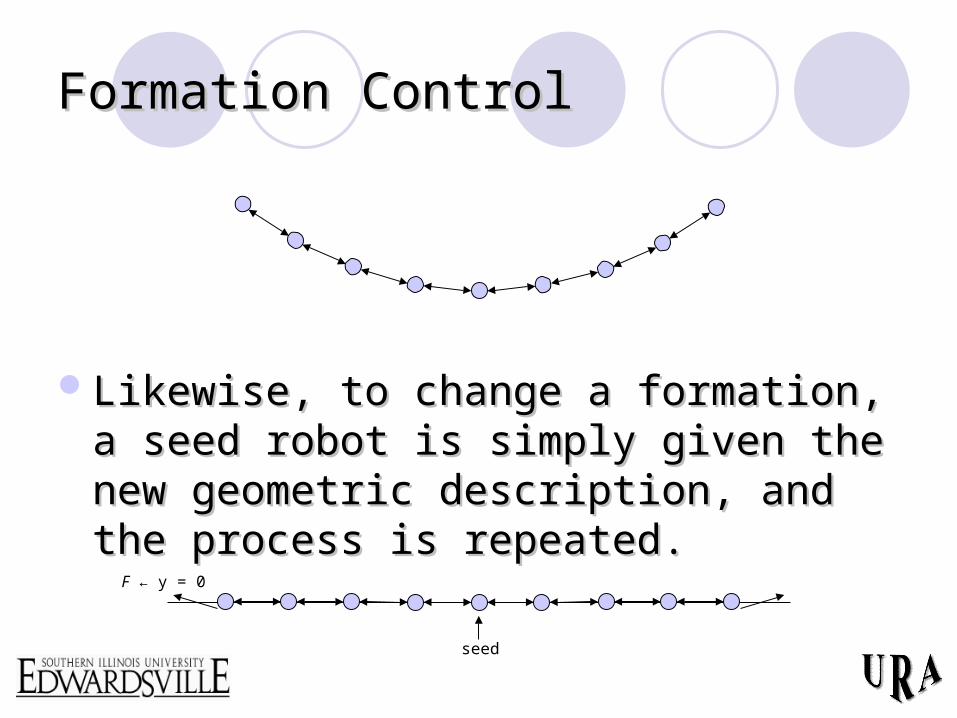
Likewise, to change a formation, a seed Likewise, to change a formation, a seed robot is simply given the new geometric robot is simply given the new geometric description, and the process is repeated.description, and the process is repeated.
F ← y = 0
seed
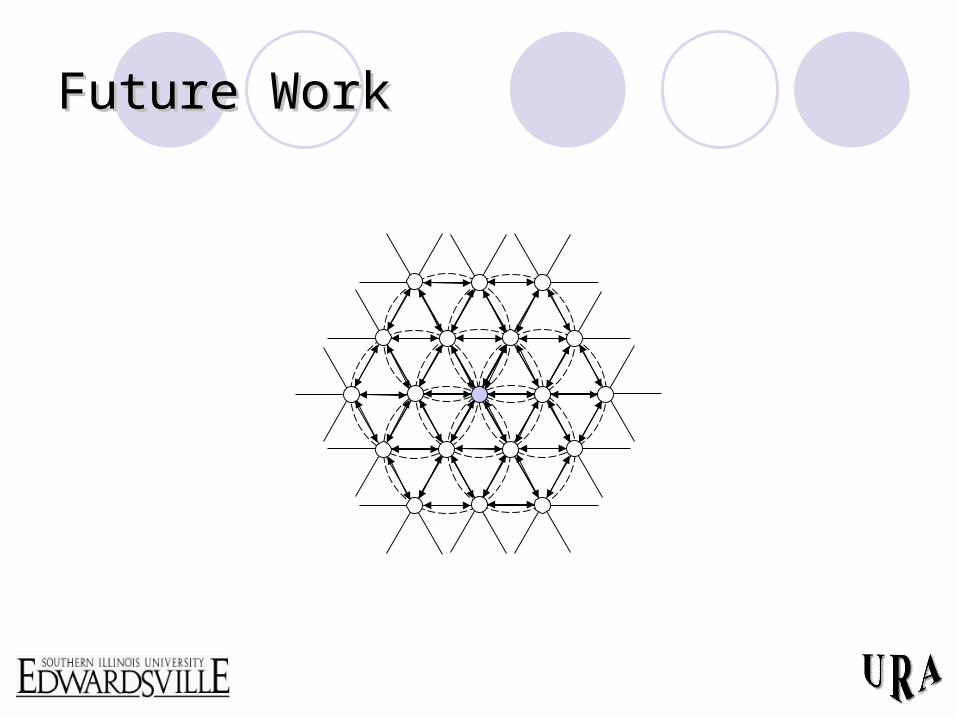
Future WorkFuture Work
To manage the robot formation, a To manage the robot formation, a graphical user interface will be developed graphical user interface will be developed that will provide a human operator with a that will provide a human operator with a visualization of the formation and visualization of the formation and information of each individual robot unit. information of each individual robot unit.
Future WorkFuture Work
If the robots are not initially put in a If the robots are not initially put in a formation, then a neighborhood must be formation, then a neighborhood must be dynamically built.dynamically built. This is done by implementing an auctioning This is done by implementing an auctioning
method where a robot is chosen to be a method where a robot is chosen to be a neighbor based on its distance to the desired neighbor based on its distance to the desired location on the geometric description.location on the geometric description.
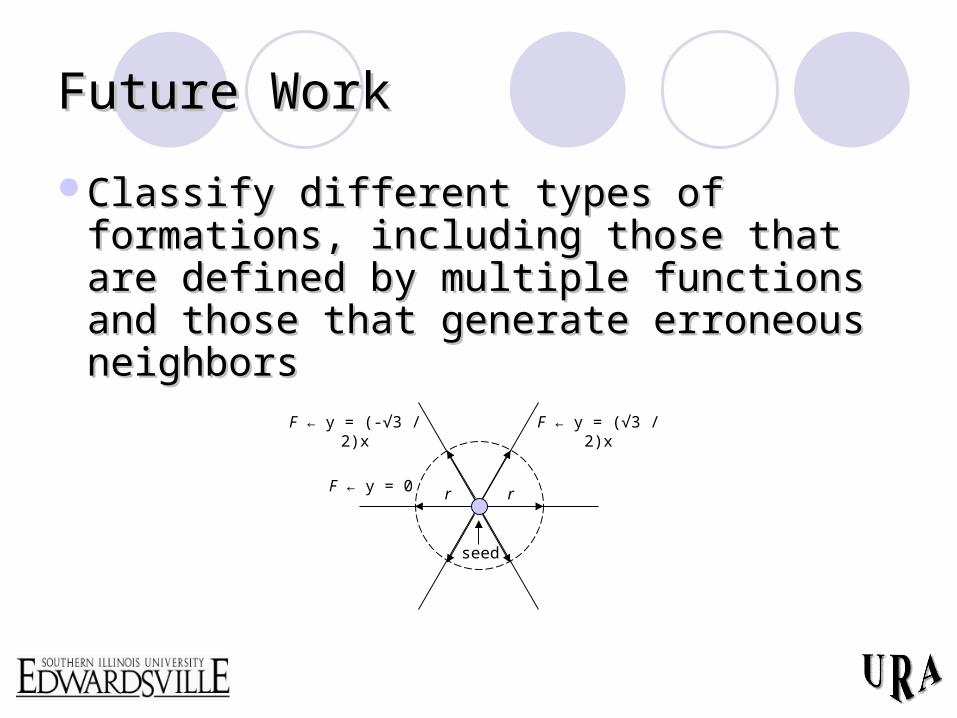
r r
F ← y = (√3 / 2)xF ← y = (-√3 / 2)x
F ← y = 0
seed
Future WorkFuture Work
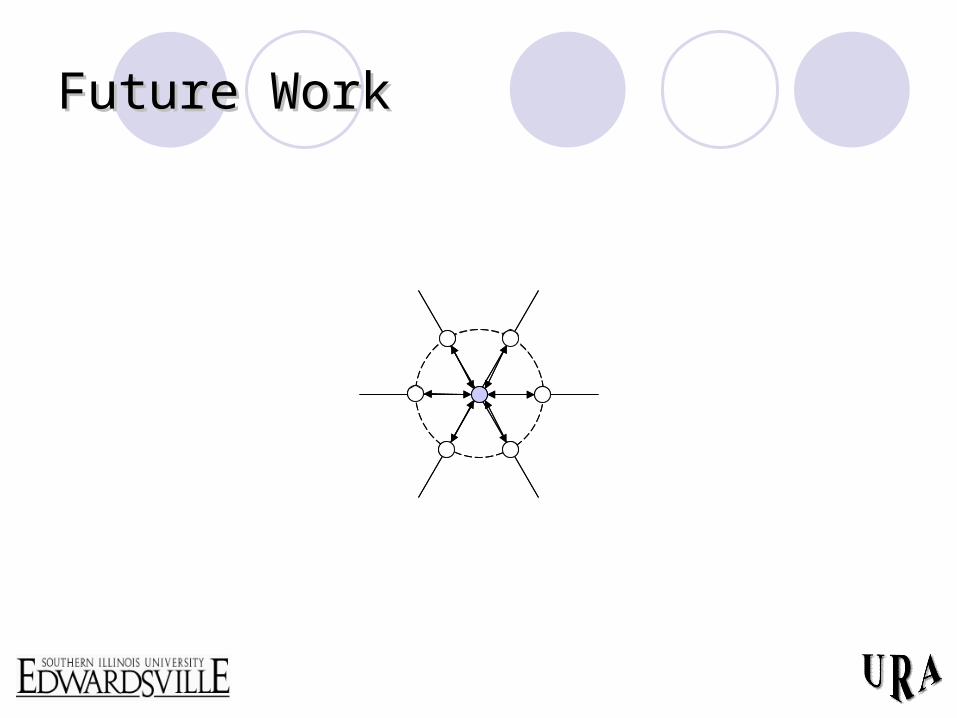
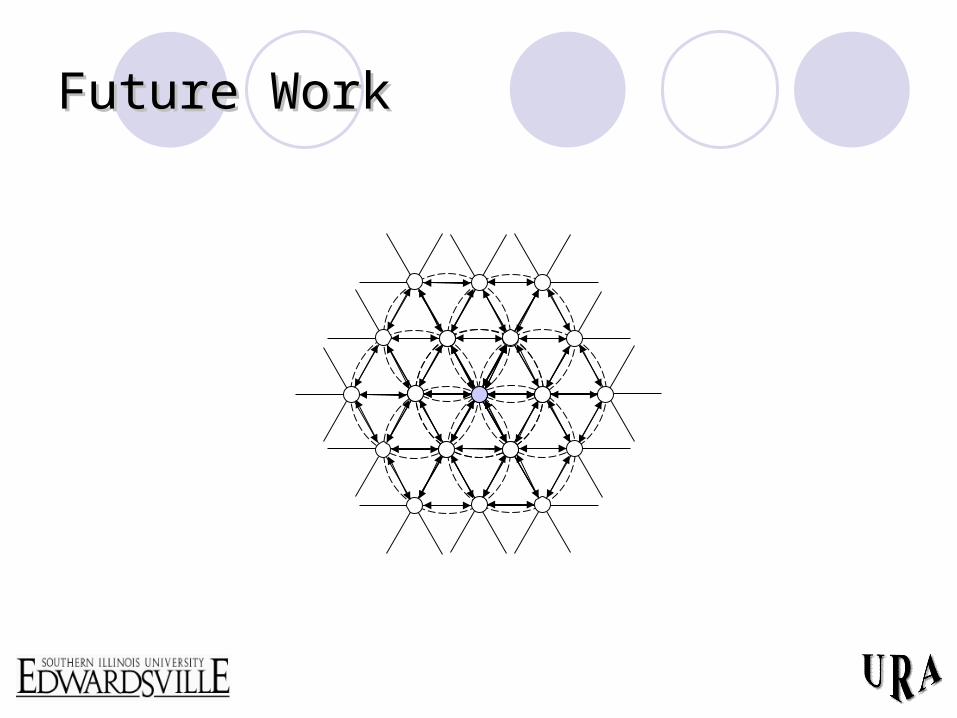
Classify different types of formations, Classify different types of formations, including those that are defined by including those that are defined by multiple functions and those that multiple functions and those that generate erroneous neighborsgenerate erroneous neighbors
Future WorkFuture Work
Future WorkFuture Work
Future WorkFuture Work
Future WorkFuture Work
After successfully showing a proof-of-After successfully showing a proof-of-concept in a concept in a simulated environment, it will be implemented and tested on a modest number of physical robots, proving that the approach is viable in real space.
ReferencesReferences
Ando K., Suzuki I., & Yamashita M. 1995. Ando K., Suzuki I., & Yamashita M. 1995. “Formation and Agreement Problems for “Formation and Agreement Problems for Synchronous Mobile Robots with Limited Synchronous Mobile Robots with Limited Visibility”, Proceedings of the IEEE Visibility”, Proceedings of the IEEE International Symposium on Intelligent International Symposium on Intelligent Control, Monterey, CA, pp. 453-460.Control, Monterey, CA, pp. 453-460.
Bekey G., Bekey, I., Criswell D., Friedman Bekey G., Bekey, I., Criswell D., Friedman G., Greenwood D., Miller D., & Will P. 2000. G., Greenwood D., Miller D., & Will P. 2000. “Final Report of the NSF-NASA Workshop “Final Report of the NSF-NASA Workshop on Autonomous Construction and on Autonomous Construction and Manufacturing for Space Electrical Power Manufacturing for Space Electrical Power Systems”, 4-7 April, Arlington, Virginia. Systems”, 4-7 April, Arlington, Virginia.
Balch, T. & Arkin R. 1998. “Behavior-based Balch, T. & Arkin R. 1998. “Behavior-based Formation Control for Multi-robot Teams” Formation Control for Multi-robot Teams” IEEE Transactions on Robotics and IEEE Transactions on Robotics and Automation, 14(6), pp. 926-939.Automation, 14(6), pp. 926-939.
Farritor, S.M., & Goddard, S. 2004. Farritor, S.M., & Goddard, S. 2004. “Intelligent Highway Safety Markers”, IEEE “Intelligent Highway Safety Markers”, IEEE Intelligent Systems, 19(6), pp. 8-11.Intelligent Systems, 19(6), pp. 8-11.
Fredslund J., & Mataric, M.J. 2002. “Robots Fredslund J., & Mataric, M.J. 2002. “Robots in Formation Using Local Information”, The in Formation Using Local Information”, The 7th International Conference on Intelligent 7th International Conference on Intelligent Autonomous Systems, Marina del Rey, Autonomous Systems, Marina del Rey, California. California.
Landis. G. 2004. “Reinventing the Solar Landis. G. 2004. “Reinventing the Solar Power Satellite”, The 53rd International Power Satellite”, The 53rd International Astronautical Congress, Houston, Texas.Astronautical Congress, Houston, Texas.
Shen W., Will P., Galstyan A., & Chuong, C. Shen W., Will P., Galstyan A., & Chuong, C. 2004. “Hormone-Inspired Self-Organization 2004. “Hormone-Inspired Self-Organization and Distributed Control of Robotic Swarms”, and Distributed Control of Robotic Swarms”, Autonomous Robots, 17, pp. 93-105.Autonomous Robots, 17, pp. 93-105.
Tejada S., Cristina A., Goodwyne P., Tejada S., Cristina A., Goodwyne P., Normand E., O’Hara R., & Tarapore, S. Normand E., O’Hara R., & Tarapore, S. 2003. “Virtual Synergy: A Human-Robot 2003. “Virtual Synergy: A Human-Robot Interface for Urban Search and Rescue”. In Interface for Urban Search and Rescue”. In the Proceedings of the AAAI 2003 Robot the Proceedings of the AAAI 2003 Robot Competition, Acapulco, Mexico.Competition, Acapulco, Mexico.
Questions?Questions?
For more information, visit For more information, visit http://roboti.cs.siue.edu/projects/robotformations.html