Embed Size (px)
Citation preview

Algorithmic Foundations of Self-Organizing Programmable Matter
by
Zahra Derakhshandeh
A Dissertation Presented in Partial Fulfillmentof the Requirements for the Degree
Doctor of Philosophy
Approved April 2017 by theGraduate Supervisory Committee:
Andrea Richa, Co-ChairArunabha Sen, Co-Chair
Guoliang XueChristian Scheideler
ARIZONA STATE UNIVERSITY
August 2017

ABSTRACT
Imagine that we have a piece of matter that can change its physical properties like its
shape, density, conductivity, or color in a programmable fashion based on either user
input or autonomous sensing. This is the vision behind what is commonly known as
programmable matter. Envisioning systems of nano-sensors devices, programmable
matter consists of systems of simple computational elements, called particles, that
can establish and release bonds, compute, and can actively move in a self-organized
way. In this dissertation the feasibility of solving fundamental problems relevant for
programmable matter is investigated. As a model for such self-organizing particle
systems (SOPS), the geometric amoebot model is introduced. In this model, particles
only have local information and have modest computational power. They achieve
locomotion by expanding and contracting, which resembles the behavior of amoeba.
Under this model, efficient local-control algorithms for the leader election problem in
SOPS are presented. As a central problem for programmable matter, shape formation
problems are then studied. The limitations of solving the leader election problem and
the shape formation problem on a more general version of the amoebot model are
also discussed. The “smart paint” problem is also studied which aims at having the
particles self-organize in order to uniformly coat the surface of an object of arbitrary
shape and size, forming multiple coating layers if necessary. A Universal Coating
algorithm is presented and shown to be asymptotically worst-case optimal both in
terms of time with high probability and work. In particular, the algorithm always
terminates within a linear number of rounds with high probability. A linear lower
bound on the competitive gap between fully local coating algorithms and coating algo-
rithms that rely on global information is presented, which implies that the proposed
algorithm is also optimal in a competitive sense. Simulation results show that the
competitive ratio of the proposed algorithm may be better than linear in practice.
i

Developed algorithms utilize only local control, require only constant-size memory
particles, and are asymptotically optimal in terms of the total number of particle
movements needed to reach the desired shape configuration.
ii

DEDICATION
I dedicate my dissertation to my beloved family, my parents, Hassan Derakhshandeh
and Fakhri Shafiei, my brother, Behnood Derakhshandeh, and my husband, Babak
Esmaeili, for your unconditional love and support.
My special thanks go to the dearest husband, Babak, for supporting me all the way! I
am truly thankful for always being there for me. Without your endless help, support
and encouragement it simply never would have been.
I also dedicate my success to my angel baby, Aniya, for taking a part of this journey
with her mommy.
iii

ACKNOWLEDGMENTS
First of all, I would like to express my deepest appreciation and gratitude to my
supervisor, Prof. Andrea Richa, for her professional guidance, patience, continuous
support, motivation, and encouragement over my Ph.D. study and research. I could
not have imagined having a better mentor for my Ph.D. study. I greatly appreciate
her insightful discussions and invaluable guidance in my research.
My sincere thanks also goes to all my committee members, Prof. Guoliang Xue,
Prof. Arunahba Sen, Dr. Theodore Pavlic, and specifically Prof. Christian Scheideler
for their invaluable advices.
I would also like to thank Araxi Hovhannessian, Christina Sebring, Monica Dugan,
Pamela Dunn, and Brint Macmillan for always being helpful and positive.
I also thank my colleagues, labmates, and friends: Xinhui Hu, Mengxue Liu,
Chenyang Zhou, Robert Gmyr, Thim Strothmann, and Joshua Daymude for the
pleasant and inspiring discussion. Their friendship is a valuable experience for me.
Last but not least, I would like to thank my husband Babak and my parents
who give me endless love and constant encouragement during my study at ASU and
throughout my life.
iv

TABLE OF CONTENTS
Page
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 MODEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 General Amoebot Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Geometric Amoebot Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 LEADER ELECTION IN SOPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Our Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3 Leader Election in the Geometric Amoebot Model . . . . . . . . . . . . . . . . 14
3.3.1 Organization into Cycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.2 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4 Asynchronous Local-Control Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.5 Deterministic Leader Elcetion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5.2 Correctness of the Deterministic Leader Election Algorithm . 25
3.5.3 Runtime Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 SHAPE FORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1.1 Our Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Line Formation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
v

CHAPTER Page
4.2.2 Analysis for Line Formation Problem . . . . . . . . . . . . . . . . . . . . . . 36
4.3 An Algorithmic Framework for Shape Formation Problems in SOPS 43
4.3.1 Algorithm and Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5 IMPOSSIBILITY RESULTS IN GENERAL AMOEBOT MODEL . . . . . . 59
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2 Impossibility Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6 UNIVERSAL COATING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.1.1 Universal Coating Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.1.2 Our Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Universal Coating Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2.2 Coating Primitives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.2.3 Leader Election Primitive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.3 Correctness and Work Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.3.1 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.3.2 Liveness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.3.3 Termination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7 ON THE RUNTIME OF UNIVERSAL COATING. . . . . . . . . . . . . . . . . . . . . 95
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
vi

CHAPTER Page
7.1.1 Our Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
7.1.2 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.2 Brief Overview of the Universal Coating Algorithm . . . . . . . . . . . . . . . . 96
7.2.1 Overview of Coating Primitives . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.3 Lower Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.4 Worst-Case Number of Rounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.4.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.4.2 From asynchronous to parallel schedules . . . . . . . . . . . . . . . . . . . 104
7.4.3 First layer: complaint-based coating and leader election . . . . . 112
7.4.4 Higher layers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.5 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
8 CONCLUSIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
vii

LIST OF FIGURES
Figure Page
2.1 The Triangular Grid Graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Particles and Bond Labeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Handover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Inner And Outer Boundaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Agents And Disjoint Cycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Segment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.4 Solitudes Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5 Inner, Outer Boundary Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.6 Candidate Elimination in Randomized LE . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.7 Candidate Elimination in Deterministic LE . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.8 Leader Election In Cellular Automata [9] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1 Snapshots of Line Formation Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 A Configuration in HEX Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 Snapshots Of The HEX Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4 Snapshots Of The TRI Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.1 An Example Of An Object With A Tunnel . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Coating Layers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.3 Complaint-based Coating Primitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4 General Layering Primitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.1 Lower Bound . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
7.2 Competitiveness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.3 Optimal Algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
viii

Chapter 1
INTRODUCTION
Recent advances in microfabrication and cellular engineering foreshadow that in
the next few decades it might be possible to assemble simple information processing
units at almost no cost. Myriads of these small-scale units could be combined to
powerful systems capable of solving intricate tasks. This vision of building cheap mi-
croscopic processing units is supported by the progress made in manufacturing micro-
electronic mechanical components, such that one can anticipate integrating logic cir-
cuits, microsensors, actuators, and communications devices on the same chip. Imagine
coating bridges and buildings with smart paint that senses and reports on traffic and
wind loads and monitors structural integrity. A smart-paint coating on a wall could
sense vibrations, monitor the premises for intruders, and cancel noise. There has also
been amazing progress in understanding the biochemical mechanisms in individual
cells such as the mechanisms behind cell signaling and cell movement [4]. Recent
results have also demonstrated that, in principle, biological cells can be turned into
finite automata [10], so one can imagine that some day one can tailor-make biological
cells to function as sensors and actuators, as programmable delivery devices, and as
chemical factories for the assembly of nano-scale structures. Particularly interesting
applications for this technology would be the construction of molecular-scale elec-
tronic structures and of nano-scale devices for surgery as well as cancer treatment
[58].
One can envision producing vast quantities of individual microscopic computa-
tional particles —whether microfabricated particles or engineered cells—to form pro-
grammable matter, as coined by Toffoli and Margolous [55]. These particles are pos-
1

sibly faulty, sensitive to the environment, and may produce various types of local
actions that range from changing their internal state to communicating with other
particles, sensing the environment, moving to a different location, changing shape or
color, or even replicating. Those individual local actions may then be used to change
the physical properties, color, and shape of the matter at a global scale.
Envisioning systems of nano-sensors devices, we are particularly interested in pro-
grammable matter consisting of systems of simple computational particles that can
establish and release bonds, can compute, and can actively move in a self-organized
way, and we investigate the feasibility of solving fundamental problems relevant for
programmable matter. As a model for such self-organizing particle systems (SOPS),
we propose amoebot, a new amoeba-inspired model for programmable matter. In our
model, the programmable matter consists of particles that can bond to neighbor-
ing particles and use these bonds to form connected structures. Particles only have
local information and have modest computational power: Each particle has only a
constant-size memory and behaves similarly to a finite state machine. The particles
act asynchronously and they achieve locomotion by expanding and contracting, which
resembles the behavior of amoeba [4].
There are many fundamental problems that one could study for such systems.
In this dissertation, we will focus on the leader election problem, shape formation
problems, and coating problems, always aiming at obtaining efficient algorithms for
those. In the leader election problem, we are given a set of particles and we would
like to select one of these as the leader. In shape formation problems, one would
like the system of particles to assume a specific shape (e.g., a disc, or a line, or
even an arbitrary convex shape). We will also consider coating problems, which is to
uniformly coat a given arbitrary object by a layer (possibly layers) of particles.
2

This dissertation is organized as follows: In Section 1.1, we study the related
work. In Section 2, we propose the amoebot model and study the model in two
different settings, the general setting and the geometric setting. In Section 3, based
on the geometric model, we present efficient local-control algorithm for leader election
problem requiring only particles with constant-size memory. In Section 4, we propose
an algorithm for line formation problem in geometric amoebot model. In addition, we
present a general algorithmic framework for more complex shape formation problems
in SOPS, and show direct applications of this framework to the problems of having
the particle system self-organize to form a hexagonal or triangular shape. We analyze
our proposed algorithms in terms of amount of work required to get the desired shape
and we analyze the correctness of the algorithms. Then, we discuss the limitations of
solving leader election and line formation problems within the general amoebot model,
in Section 5. We present a worst-case work-optimal Universal Coating algorithm that
uniformly coats any object of arbitrary shape and size that allows a uniform coating
in Section 6. In Section 7, we then continue the study of our Universal Coating
algorithm by focusing on its runtime analysis, showing that our algorithm terminates
within a linear number of rounds with high probability. We conclude the work in
Section 8.
1.1 Related Work
Many approaches related to programmable matter have recently been proposed.
One can distinguish between active and passive systems. In passive systems the
particles either do not have any intelligence at all (but just move and bond based
on their structural properties or due to chemical interactions with the environment),
or they have limited computational capabilities but cannot control their movements.
Examples of research on passive systems are DNA computing [2, 14, 21, 29, 60], tile
3

self-assembly systems in general (e.g., see the surveys in [37, 50, 61]), population
protocols [5], and slime molds [15, 46]. We will not describe these models in detail as
they are only of little relevance for our approach. On the other hand in active systems,
computational particles can control the way they act and move in order to solve a
specific task. Robotic swarms, and modular robotic systems are some examples of
active programmable matter systems.
In the area of swarm robotics it is usually assumed that there is a collection of
autonomous robots that have limited sensing, often including vision, and communi-
cation ranges, and that can freely move in a given area. They follow a variety of
goals, for example graph exploration (e.g., [38]), gathering problems (e.g., [3, 23]),
shape formation problems (e.g., [39, 52]), and to understand the global effects of lo-
cal behavior in natural swarms like social insects, birds, or fish (see e.g., [11, 18]).
Surveys of recent results in swarm robotics can be found in [43, 48]; other samples
of representative work can be found in e.g., [6, 8, 24, 25, 28, 41, 44]. Coating of
objects is commonly not studied as a stand-alone problem, but is part of collective
transport (e.g., [59]) or collective perception (e.g., see respective section of [16]). Some
research focuses on coating objects as an independent task under the name of tar-
get surrounding or boundary coverage. The techniques used in this context include
stochastic robot behaviors [45, 51], rule-based control mechanisms [12] and potential
field-based approaches [13]. While the analytical techniques developed in the area of
swarm robotics and natural swarms are of some relevance for this work, the individual
units in those systems have more powerful communication and processing capabilities
than in the systems we consider.
In a recent paper [49], Michail and Spirakis propose a model for network con-
struction that is inspired by population protocols [5]. The population protocol model
relates to self-organizing particles systems, but is also intrinsically different: agents
4

(which would correspond to our particles) freely move in space and can establish con-
nections to any other agent in the system at any point in time, following the respective
probabilistic distribution. In the paper the authors focus on network construction for
specific topologies (e.g., spanning line, spanning star, etc.). However, in principle,
it would be possible to adapt their approach also for studying coating problems in
SOPS.
The field of modular self-reconfigurable robotic systems focuses on intra-robotic
aspects such as the design, fabrication, motion planning, and control of autonomous
kinematic machines with variable morphology (see e.g., [40, 63]). Metamorphic robots
form a subclass of self-reconfigurable robots that share some of the characteristics of
our geometric model [22]. The hardware development in the field of self-reconfigurable
robotics has been complemented by a number of algorithmic advances (e.g., [17,
52, 57]), but so far mechanisms that automatically scale from a few to hundreds or
thousands of individual units are still under investigation, and no rigorous theoretical
foundation is available yet.
The nubot model [19, 20, 62] by Woods et al. aims at providing the theoretical
framework that would allow for a more rigorous algorithmic study of biomolecular-
inspired systems, more specifically of self-assembly systems with active molecular
components. While bio-molecular inspired systems share many similarities with our
self-organizing particle systems, there are many differences that do not allow us to
translate the algorithms and other results under the nubot model to our systems —
e.g., there is always an arbitrarily large supply of ”extra” particles that can be added
to the system as needed, and the system allows for an additional (non-local) notion
of rigid-body movement.
Our proposed model has many direct applications in the context of nano-sensor
networks or modular nano-robotics, and may even extend beyond those: For example
5

in scratch-wound healing, epithelial cells as our skin try to cover the gap caused by
a scratch while they stick together and move as a group in an analogous fashion to
particles moving in our model [56].
6

Chapter 2
MODEL
In this section we propose a new amoeba-inspired model called amoebot model
for programmable matter. We study two variations of this model throughout this
work. Firstly, we consider a general version of our model in Section 2.1. Then, in
Section 2.2, we consider a geometric variant of the general model.
2.1 General Amoebot Model
In the general amoebot model, programmable matter consists of a uniform set of
simple computational units called particles that can move and bond to other particles
and use these bonds to exchange information. The particles act asynchronously and
they achieve locomotion by expanding and contracting, which resembles the behavior
of amoeba [4].
As a base of this model, we assume that we have a set of particles that aim at
maintaining a connected structure at all times. This is needed to prevent the particles
from drifting apart in an uncontrolled manner like in fluids and because in our case
particles communicate only via bonds. The shape and positions of the bonds of
the particles mandate that they can only assume discrete positions in the particle
structure. This justifies the use of a possibly infinite, undirected graph G = (V,E),
where V represents all possible positions of a particle (relative to the other particles
in their structure) and E represents all possible transitions a particle can perform in
one action as well as all places where neighboring particles can bond to each other.
Each particle occupies either a single node or a pair of adjacent nodes in G, i.e.,
it can be in two different shapes, and every node can be occupied by at most one
7

particle. Two particles occupying adjacent nodes are connected by a bond, and we
refer to such particles as neighbors. Particles are anonymous but the bonds of each
particle have unique labels, which implies that a particle can uniquely identify each
of its outgoing edges. Each particle has a local memory, and any pair of connected
particles has a shared memory that can be read and written by both particles. Each
particle has a constant-size shared/local memory.
Particles move through expansions and contractions : If a particle occupies one
node (i.e., it is contracted), it can expand to an unoccupied adjacent node to occupy
two nodes. If a particle occupies two nodes (i.e., it is expanded), it can contract to
one of these nodes to occupy only a single node. Performing movements via expan-
sions and contractions has various advantages. For example, it would easily allow a
particle to abort a movement if its movement is in conflict with other movements. A
particle always knows whether it is contracted or expanded and this information will
be available to neighboring particles. For an expanded particle, we denote the node
the particle last expanded into as the head of the particle and call the other occupied
node its tail. In a handover, two scenarios are possible: a) a contracted particle p can
”push” a neighboring expanded particle q and expand into the neighboring node pre-
viously occupied by q, forcing q to contract, or b) an expanded particle p can ”pull”
a neighboring contracted particle q to a cell occupied by it thereby expanding that
particle to that cell, which allows p to contract to its other cell. The ability to use a
handover allows the system to stay connected while particles move (e.g., for particles
moving in a worm-like fashion). Note that while expansions and contractions may
represent the way particles physically move in space, they can also be interpreted as
a particle ”looking ahead” and establishing new logical connections (by expanding)
before it fully moves to a new position and severs the old connections it had (by
contracting).
8

The configuration C of the system at the beginning of time t consists of the nodes
in Geqt occupied by the object and the set of particles, and for each particle p, C
contains the current state of p, including whether it is expanded or contracted, its
port labeling, and the contents of its local memory. We say a particle system in
a system configuration is connected if it is in a configuration where the graph G|A
induced by the set of nodes A ⊆ V occupied by particles is connected.
Following the standard asynchronous model of computation [47], we assume that
the system progresses through atomic activations of individual particles 1. At each
(atomic) activation a particle can perform at most one movement and an arbitrary
bounded amount of computation, involving its local memory and the shared memories
of its neighbors. A classical result under this model is that for any asynchronous
execution of atomic particle activations, we can organize these activations sequentially
still producing the same end configuration [47]. We count (asynchronous) time in
terms of the number of activations. A round is over once each particle has been
activated at least once. We assume the activation sequence to be fair, i.e., for each
particle p and any point in time t, p will eventually be activated at some time t′ ≥ t.
Hence, a computation of a particle system is a potentially infinite sequence of
actions A1, A2, . . . based on some initial system configuration C0, where action Ai
transforms system configuration Ci−1 into system configuration Ci. While the (paral-
lel) time complexity of a computation is usually measured in rounds, the work spent
by the particles till time t is measured by the number of movements they have done
until that point (We ignore other state changes since their energy consumption should
be irrelevant compared to the energy for a movement.).
1In reality, this may not be the case, but a local contention resolution rule could be used to make
sure that only one particle within a local neighborhood is active at a time, which would be sufficient
for our results to hold in a concurrent environment.
9

Let C be the set of all system configurations with n particles in which the particle
system is connected. In general, a computational problem P for the particle system
is specified by a set C ′ ⊆ C of permitted initial system configurations with n particles
and a mapping F : C ′ → 2C, where F (c) ⊆ C determines the set of permitted
final configurations for any initial configuration c ∈ C ′. A particle system solves
problem P = (C ′, F ) if for any initial system configuration c ∈ C ′, all computations
of the particle system eventually reach a system configuration in F (c) without losing
connectivity, and whenever such a system configuration is reached for the first time,
the system stays in F (c). If for all computations a final configuration is reached
in which all particles decided to halt (i.e., they decided not to perform any further
actions, irrespective of future events), then the particle system is also said to decide
problem P . Note that being in a final configuration does not necessarily mean that all
particles decided to halt. If C ′ = C, so any initial configuration is permitted (including
arbitrary faulty configurations, as long as the particle system is connected), then a
particle system solving P is also said to be self-stabilizing.
2.2 Geometric Amoebot Model
Besides the general amoebot model, we will also consider the geometric amoebot
model. The geometric amoebot model is a specific variant of the general amoebot
model in which the underlying graph G is defined to be the equilateral triangular
graph Geqt2. See Figure 2.1.
2The triangular grid graph Geqt is the dual graph of a regular hexagonal tiling in 2D space.
10

Figure 2.1: Figure shows a section of Geqt; nodes of Geqt are shown as black circles.
As before, particles are anonymous but the bonds of each particle have unique
labels. Therefore, a particle can uniquely identify each of its outgoing edges. We
also assume that the particles have a common chirality, i.e., they all have the same
notion of clockwise direction, which allows each particle p to order its head bond
labels. W.l.o.g.3, we assume that each particle labels its head and tail bonds from 0
to 5 in clockwise order. However, particles do not have a common sense of orientation
since they can have different offsets of the labelings (Figure 2.2(b)). In Figure 2.2(a),
we illustrate a set of particles (some contracted, some expanded) on the underlying
graph Geqt.
Figure 2.3 illustrates an example of particles p and q executing a handover in Geqt.
As the result of executing the handover, the expanded particle p contracts and the
contracted particle q expands.
3Without loss of generality.
11

(a) (b)
Figure 2.2: (a) shows an example of a particle structure in the geometric amoebot
model consisting of five particles on Geqt: the underlying graph Geqt is shown as a
gray mesh; a particle occupying a single node, a contracted particle, is depicted as
a black circle, and a particle occupying two nodes, an expanded particle, is depicted
as two black circles connected by an edge. (b) depicts two particles occupying two
non-adjacent positions on Geqt; the particles have different offsets for their head bond
labelings.
Figure 2.3: Two particles performing a handover. The left part shows an expanded
particle p and a contracted particle q before executing the handover. The right part
depicts the configuration of the particles after performing a handover. This ends up
p to contract and q to expand.
12

Chapter 3
LEADER ELECTION IN SOPS
3.1 Introduction
In the leader election problem we are given a set of particles, and the problem is
to select one of these as the leader. Many problems like the majority problem (all
particles have to agree on the value held by the majority) can easily be solved once
the leader election problem can be solved. The same has also been observed for shape
formation, as most shape formation algorithms depend on some seed element. Based
on the geometric model, we present efficient local-control algorithm for leader election
problem in SOPS. For the leader election problem, initially we assume that the particle
system is connected and all memories are empty. The set of final (goal) system
configurations, contains any configuration in which the particles form a connected
structure and exactly one particle is a leader (i.e., only this particle is in a leader state
while the remaining particles are in a non-leader state). Our goal will be to come
up with a distributed algorithm that allows a particle system to decide the leader
election problem. Throughout this section, we assume for the sake of simplicity that
in an initial configuration all particles are contracted. Our algorithm can easily be
extended to dispose of this assumption.
3.2 Our Contributions
Here, we focus on the problem of solving leader election for particles with con-
stant memory. For the geometric amoebot model we show that there is a distributed
algorithm that can decide the leader election problem, i.e., at the end we have exactly
13

one leader and the leader knows that it is the only leader left. Moreover, the runtime
for our leader election algorithm is worst-case optimal in a sense that it needs at most
O(L) rounds on expectation, where L is the maximum length of a boundary between
the particle structure and an empty region (inside or outside of it) in Geqt. Our leader
election algorithm assumes that the system starts in a well-initialized configuration.
We also study the leader election problem in the geometric amoebot model assuming
that all the particles have a common orientation and present a deterministic algo-
rithm for that which needs linear number of the rounds with respect to the number of
particles in the system to terminate. In Section 5, we will show that under the gen-
eral amoebot model, the leader election problem is not decidable by any distributed
algorithm.
3.3 Leader Election in the Geometric Amoebot Model
In this section we show how the leader election problem can be decided in the
geometric amoebot model. Our approach organizes the particle system into a set of
cycles and executes an algorithm on each cycle independently. For simplicity and ease
of presentation we first assume that particles have a global view of the cycle they are
part of, that agents act synchronously, and that their local memory is unbounded.
However, in the local-control protocol none of these assumptions are needed. In
particular, the particles only require a constant amount of memory. In Section 3.4 we
present a high level descriptions of the techniques used in the local-control protocol,
which relies heavily on token passing.
3.3.1 Organization into Cycles
Let A ⊆ V be any initial distribution of contracted particles such that Geqt|A is
connected. Consider the graph Geqt|V \A induced by the unoccupied nodes in Geqt.
14

We call a connected component of Geqt|V \A an empty region. Let N(R) be the neigh-
borhood of an empty region R in Geqt. Then all nodes in N(R) are occupied and we
call the graph Geqt|N(R) a boundary. Since Geqt|A is a connected finite graph, exactly
one empty region has infinite size while the remaining empty regions have finite size.
We define the boundary corresponding to the infinite empty region to be the unique
outer boundary and refer to a boundary that corresponds to a finite empty region as
an inner boundary, see Figure 3.1.
Figure 3.1: The figure shows a particle structure with 3 boundaries. The outer
boundary is shown as a solid line and the two inner boundaries are shown as dashed
lines.
The particles occupying a boundary can instantly (i.e., without communication)
organize themselves into a cycle using only local information: Consider a boundary
corresponding to an empty region R. Let p be a particle occupying a node v of the
boundary. By definition there exists a non-occupied node w ∈ R that is adjacent to v
in the graph Geqt. The particle p iterates over the neighboring nodes of v in clockwise
orientation around v starting at w. Consider the first occupied node it encounters;
the particle occupying that node is the successor of p in the cycle corresponding to
that boundary. Analogously, p finds its predecessor in the cycle by traversing the
neighborhood of v in counter-clockwise orientation.
15

Note, that a particle can belong to up to three boundaries at once. Furthermore,
a particle cannot locally decide whether two empty regions it sees (i.e., maximal
connected components of non-occupied nodes in the neighborhood of v) are distinct.
We circumvent these problems by letting a particle treat each empty region in its
local view as distinct. For each such empty region, a particle executes an independent
instance of the same algorithm. Hence, we say a particle acts as a number of distinct
agents. For each of its agents a particle determines the predecessor and successor as
described above. This effectively connects the set of all agents into disjoint cycles as
depicted in Figure 3.2. Observe that from a global perspective the cycle of the outer
boundary is oriented clockwise while a cycle of an inner boundary is oriented counter-
clockwise. This is a direct consequence of the way the predecessors and successors of
an agent are defined.
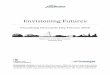
Figure 3.2: The depicted particle system is the same as in the Figure 3.1. In this figure
particles are depicted as gray circles. The black dots inside of a particle represent its
agents. As in Figure 3.1 the outer boundary is solid and the two inner boundarys are
dashed.
3.3.2 Algorithm
The leader election algorithm operates independently on each cycle. At any given
time, some subset of agents on a cycle will consider themselves candidates, i.e. poten-
16

tial leaders of the system. Initially, every agent considers itself a candidate. Between
any two candidates on a cycle there is a (possibly empty) sequence of non-candidate
agents. We call such a sequence a segment. For a candidate c we refer to the segment
coming after c in the direction of the cycle as seg(c) and refer to its length by |seg(c)|.
We refer to the candidate coming after c as the succeeding candidate (succ(c)) and to
the candidate coming before c as the preceding candidate (pred(c)) (see Figure 3.3).
We drop the c in parentheses if it is clear from the context. We define the distance
d(c1, c2) between candidates c1 and c2 as the number of agents between c1 and c2
when going from c1 to c2 in direction of the cycle. We say a candidate c1 covers a
candidate c2 (or c2 is covered by c1) if |seg(c1)| > d(c2, c1) (see Figure 3.3).
Figure 3.3: A cutout from a cycle that is oriented to the right. Non-candidate agents
are small black dots, candidates are bigger dots. The candidate c covers pred(c) since
|seg(c)| > d(pred(c), c).
The leader election progresses in phases. In each phase, each candidate executes
Algorithm 1. A phase consists of three synchronized subphases, i.e., agents can only
progress to the next subphase once all agents have finished the current subphase.
Consider the execution of Algorithm 1 by a candidate c. If the algorithm returns
”not leader” then c revokes its candidacy and becomes part of a segment. If the
algorithm returns ”leader”, c will become the leader of the particle system. The
transferal of candidacy in subphase 2 means that c withdraws its own candidacy but
at the same time promotes the agent at position pos (i.e., succ(c) in subphase 1) to
be a candidate. Once a candidate becomes a leader it broadcasts this information
such that all particles can halt.
17

Algorithm 1 Leader Election for a candidate c
Subphase 1:
pos ← position of succ(c)
if covered by any candidate or |seg(c)| < |seg(pred(c))| then
return not leader
Subphase 2:
if coin flip results in heads then
transfer candidacy to agent at pos
Subphase 3:
if only candidate on boundary then
if outside boundary then
return leader
else
return not leader
As we show in [36, 35], Algorithm 1 decides the leader election problem in the
geometric amoebot model and requires O(Lmax) rounds on expectation, where Lmax
is the length of the longest cycle in the particle system.
3.4 Asynchronous Local-Control Protocol
Here we present a high level description on how specific parts of the algorithm
can be realized as an asynchronous local-control protocol (See [26] for proofs). We
assume that tokens are messages of constant size. The tokens of each subphase of our
algorithm are independent of each other, so an agent has to handle distinct tokens
18

for each phase at the same time. If not otherwise specified, we assume that tokens
of a single subphase move through the agents in a well-ordered manner (i.e., a token
does not surpass another token in front of it but waits until the agent is free to hold
it).
Solitude Verification: A candidate that wants to determine whether it is the
only candidate left, tests if its segment ends in another candidate or in itself. The
candidate inspects all non-leader agents on its segment. To do so, it enforces its own
orientation on all agents in its segment. Thereby, every agent in the segment is able
to determine the direction of its outgoing edge in direction of the cycle. These edge
directions can be seen as vectors in the two dimensional plane. By a simple geo-
metrical argument it is clear that in case the segment is the whole cycle, the vectors
cancel out component wise (see Figure 3.4). By a simple token passing scheme agents
will try match their edge directions component wise with an edge direction in the
opposing direction from another agent. Finally, the candidate inspects the segment
and if all agents are matched it is the only candidate left on the cycle.
Figure 3.4: An example of solitude verification: the candidate (shown slighly bigger)
has enforced its orientation (x and y arrows) on all agents. All non-candidate agents
determined the offset to the succeeding agent in direction of the cycle (arrows and
numbers at nodes).
19

Inner Outer Boundary Test: The distinction between inner boundaries and
outer boundary is readily apparent when looking at a particle system from a global
perspective. Here we are interested in whether the last candidate is able to locally dis-
tinguish between the two. The last candidate of a cycle can decide whether its cycle
corresponds to an inner or the outer boundary by using the geometrical properties in-
duced byGeqt together with the ability to distinguish clockwise from counter-clockwise
rotation as follows. A cycle corresponding to an inner boundary has counter-clockwise
rotation while a cycle corresponding to the outer boundary has clockwise rotation,
see Figure 3.2. The candidate sends a token along the cycle that sums the angles of
the turns the cycle takes, see Figure 3.5.
Figure 3.5: The angle between the directions a token enters and exits an agent.
When the token returns to the candidate its value represents the external angle
of the polygon corresponding to the cycle while respecting the rotation of the cycle.
So it is −360 for an inner boundary and 360 for the outer boundary. The token
can represent the angle as an integer k such that the angle is k · 60. Furthermore,
to distinguish the two possible final values of k it is sufficient to store the k modulo
5, so that the token only requires 3 bits of memory (since for the outer boundary we
get k = 1 and for an inner boundary we get k = 4).
Candidate Elimination: In subphase 1 of Algorithm 1 candidates use differences
in length of their segments to eliminate other candidates. To implement this behavior
in a local-control protocol, a candidate will virtually push its segment into the segment
20

of its preceding candidate and eliminate all candidates that are covered. If a candidate
detects that its segment is too short to cover any candidate it revokes candidacy.
Consider a candidate c at the beginning of subphase 1. It sends a starting token
along its segment (i.e., in direction of the cycle). Each non-candidate agent that
receives the token forwards it and sends a cover token in opposing direction of the
cycle. Candidate succ(c) consumes the starting token and sends a special end of
segment (EOS) cover token. As long as the cover tokens stay on the segment of c we
consider them to be passive, i.e., they are only forwarded by non-candidate agents in
a pipelined fashion. Once a token passes c on its path it becomes active. An active
cover token matches with the first agent on its path that has not been matched by
another active token of c.
Once an agent is matched it deletes all other tokens it holds (e.g., cover tokens
from another candidate), except for passive tokens. If a candidate is matched it re-
vokes candidacy immediately. Additionally, if it is in subphase 1 it consumes its own
passive cover tokens instead of forwarding them (see Figure 3.6 for examples). It
also clears its active tokens which implicitly unmatches all the agents that has been
matched with its own active tokens. If the candidate is in subphase 2 or 3, no ad-
ditional work has to be done (except for the aforementioned annulment). Once the
EOS token has matched, the last matched agent sends a finish token back to c. As
soon as c receives this token, subphase 1 is complete. If the cover tokens of c have
not matched with another candidate (which can be detected by the finish token) c
revokes candidacy and annuls all tokens sent out in subphase 1 (i.e., it unmatches
all agents), otherwise the agents stay matched for subphase 2. Note, that in case
the EOS token has matched with another candidate (i.e., both segments have equal
length), both candidates stay candidates.
21

Figure 3.6: Two examples for the token-agent-matching process. Agents are nodes
on the lowest line, which is part of a cycle directed to the right. Colored lines depict
unmatched cover tokens occupying consecutive agents ( agents below token lines are
already matched). Tokens on the lower lane are still passive, tokens in the upper lane
are active. Case (a): The red and blue candidate have already matched parts of
their respective seg(pred) segments. Passive tokens of blue are not canceled out by
active tokens of red. Case (b): The red tokens have already matched up to the blue
candidate and beyond. Blue revoked leadership, the passive tokens of blue (dotted
lines) cannot become active and are simply consumed by the blue candidate.
Candidate Transferral: The candidate transfers candidacy to the agent at posi-
tion pos (i.e., succ(c) before subphase 1) with probability 12
in subphase 2. In order to
do so in a local-control protocol, the candidate uses the matched agents in from sub-
phase 1. By using a token passing scheme similar to the first subphase, the matched
agents from the first subphase create cover tokens that match with the agents on
c’s segment. Candidacy is transferred onward on the newly matched agents (which
unmatches the agents implicitly) until position pos.
22

3.5 Deterministic Leader Elcetion
We now study the leader election problem in the geometric amoebot model as-
suming that all the particles have a common orientation. The orientation of a particle
p whose head occupies node v is given by the direction of the vector (v, u), where
u is the node adjacent to v via p’s 0-labeled edge. Particles have no other global
information. We describe the algorithm in the following section.
3.5.1 Algorithm
Here, similar to the randomized version of the leader election problem presented
above, our approach organizes the particle system into a set of cycles and executes the
algorithm on each cycle independently. Organization into cycles follows the rules we
already mentioned in Section 3.3.1. Initially, every agent considers itself a candidate.
As before, between any two candidates on a cycle there is a (possibly empty) sequence
of non-candidate agents called a segment. For a candidate c we refer to the segment
coming after c in the direction of the cycle as seg(c). Recall that we refer to the
candidate coming after c in the direction of the cycle as the succeeding candidate
(succ(c)), and to the candidate coming before c as the preceding candidate (pred(c)).
The leader election progresses in phases. In each phase, each candidate executes
Algorithm 2. A phase consists of two subphases. As before, for any candidate c
executing the algorithm, if the algorithm returns “not leader” then c revokes its
candidacy and becomes part of a segment. If the algorithm returns “leader”, c will
become the leader of the particle system.
In subphase 1 of Algorithm 2, each candidate c on a cycle of boundary particles
competes with succ(c). Every agent in seg(c) determines the offset to the succeeding
agent in direction of the cycle. These offsets can be seen as vectors in two dimensional
23

plane. By using a token passing mechanism, particles try to match their vectors
component-wise with another vector with an opposite component. The candidate c
then inspects its segment. If all vectors are completely matched, it means c is the only
candidate on that boundary (this corresponds to our solitude verification procedure
we presented in randomized leader election algorithm, Section 3.4). Otherwise, if
there are remaining negative (resp. positive) y-components unmatched, c is further
north (resp. south) than succ(c) and we say c covers (resp. is covered by) succ(c). If
all y-components of the vectors are matched, and there are remaining negative (resp.
positive) x-components unmatched, c is further east (resp. west) than succ(c), and
again we say c covers (resp. is covered by) succ(c). See Figure 3.7.
p
q
Figure 3.7: Two candidates p and q (shown slightly bigger) are shown in the figure.
Non-candidate agents are small black dots. Common orientation for all the particles
is given (x and y arrows). Each agent has obtained its offset to the succeeding agent
(arrows and numbers at nodes). p inspects its segment. The unmatched y-component
has positive sign, which means p is further south than q. Thus, p revokes its candidacy,
and we say p is covered by q (q covers p).
Executing the algorithm by all particles, eventually the last remaining candidate
on each cycle is deterministically chosen to be the “east-most” particle of the set of
the “north-most” particles on that cycle. Assuming that c is the only candidate on
the boundary, in subphase 2 of Algorithm 2, c detects if the boundary it belongs to
24

is an inner boundary or an outer boundary. If c is located on the outer boundary, it
becomes the leader and broadcasts this information such that all particles can halt.
The process of detecting inner or outer boundaries for a candidate c is exactly as we
presented in Section 3.4.
Algorithm 2 Leader Election for a candidate c
Subphase 1:
if covered by a candidate then
return not leader
Subphase 2:
if only candidate on boundary then
if outside boundary then . inner/outer boundary detection
return leader
else
return not leader
3.5.2 Correctness of the Deterministic Leader Election Algorithm
In order to prove the correctness of our algorithm, we show that it satisfies the
following conditions relating to the entire particle system (not just a single cycle):
1. Safety : There always exists at least one candidate.
2. Liveness : In each phase if there is more than one candidate, at least one can-
didate withdraws candidacy.
Lemma 1. Algorithm 2 satisfies the safety condition.
Proof. We will show by induction that on the outer boundary’s cycle there will always
be at least one candidate. Initially, this holds trivially. So assume that it holds before
25

a phase. Let c be the east-most candidate of the north-most candidate(s) on the cycle.
Since c is either further north than succ(c), or if c is as north as succ(c), it is further
east than succ(c), c remains a candidate. Therefore there is no candidate covering
c. Hence, c will not withdraw candidacy in subphase 1. In subphase 2, c will not
withdraw candidacy because it lies on the outer boundary. Hence, there is still a
candidate after the phase.
Lemma 2. Algorithm 2 satisfies the liveness condition.
Proof. Assume that there are two or more candidates in the system. First, we consider
the case in which there is a cycle with two or more candidates. Consider any two
consecutive candidates on that cycle; if one is further north than the other, at least
one of them will withdraw its candidacy in subphase 1. Otherwise, one of them will
be further west than the other and therefore will withdraw its candidacy in subphase
1. Hence, the number of candidates will be reduced. Now consider the case that all
cycles have at most one candidate. Then there is a cycle corresponding to an inner
boundary that has exactly one candidate. That candidate will withdraw candidacy
in subphase 2 and thereby reduces the number of candidates in the system.
The following theorem is a direct consequence of Lemmas 1 and 2.
Theorem 1. Algorithm 2 deterministically decides the leader election problem in the
geometric amoebot model.
3.5.3 Runtime Analysis
For a cycle of agents let L be the length of the cycle and let li be number of leader
candidates before phase i of the execution of Algorithm 2. Initially li = L since all
the agents in the cycle are leader candidates. If li ≤ 2 then in phase i + 1 either
the leader is elected (outer boundary) or all candidates on the cycle vanish (inner
26

boundary), as a consequence of Lemma 2. For the case li ≥ 2, Lemma 3 provides the
key insight of our analysis.
Lemma 3. Let li be the number of the leader candidates in a cycle. For any phase i,
it holds li+1 ≤⌈li2
⌉.
Proof. Suppose a cycle contains li > 1 candidates in phase i. For any candidate c
in the cycle and its successor candidate, succ(c), the following argument holds. It is
clear that either one of these two candidates is further north than the other, or in
case one is as north of the other, one is further east than the other. This competition
results candidate c or succ(c) to revoke the candidacy. So from every two consecutive
candidates in a cycle at least one of them will revoke its candidacy. Thus at the end
of subphase 1 of phase i, at least a half of candidates will revoke their candidacy.
Theorem 2. Algorithm 2 terminates in O(Lmax log(Lmax)) time, where Lmax is the
length of the longest cycle in the particle system.
Proof. Based on previous lemma, Lemma 3, it is easy to see that our algorithm
requires O(log(Lmax)) phases to elect a leader. Each phase of the local control algo-
rithm needs O(l′i) rounds where l′i is the length of the longest segment. Therefore,
Algorithm 2 elects a leader in no worst than O(Lmax log(Lmax)) time.
Improving the Deterministic Leader Election Algorithm Runtime:
Algorithm 2 guarantees that a leader will be elected in O(Lmax logLmax) time. A
small modification of the algorithm can lead to linear runtime, without compromising
its correctness. We briefly present a high-level description of this modification: Each
candidate c competes with its succ(c) as before, but instead of having only one com-
petition per each phase which is with its first next candidate in the cycle, c continues
27

the competition with next candidates one after the other in the direction of the cycle,
i.e., succ(succ(c)) and so on. To do this, the remaining unmatched vectors in c’s
segment (which made succ(c) to lose the game) continue their way in the direction of
the cycle, and try to match with existing tokens in the newly (enlarged) segment of c,
which has been enlarged due to revoking candidacy by succ(c). This process continues
until either c revokes its candidacy in a competition, or it becomes the only candidate
in the cycle (all vectors completely match). It should be noted that the vectors on
seg(c) will not pass succ(c) and enter seg(succ(c)) except once the candidate succ(c)
has lost the game. Considering the east-most candidate out of the north-most candi-
dates, the candidate starts the competition with its first next candidate on the cycle
and it beats each candidate on the cycle one after the other. The details for process of
withdrawing leadership is as we already mentioned in the randomized version of the
algorithm. Very similar idea has been followed in [9] proving our improved runtime
to be O(Lmax).
Theorem 3. The modified version of Algorithm 2 as described above requires O(Lmax)
rounds to elect a leader.
We note that we recently got to know that there exists a paper which shares many
similarities with our deterministic algorithm. We shortly explain their approach at a
high level:
This algorithm works in a synchronous fashion in which cells have access to a “global
compass”; i.e., cells have a common sense of where is the “left”, “right”, “up”, and
“down” directions. The local control algorithm works on the outer boundary (initially
they assume the structure has no hole therefore no inner boundary exists in the
structure). Cells only need constant-size memory. In contrast to our algorithm that
initially assumes all particles on any boundary are leader candidates, only certain
28

cells begin as candidates; specifically, starting candidates are those cells that have
no particle to their left and above. Using their global compass, each boundary cell
can locally determine where it is located relative to the given structure. The cell
will accordingly mark itself as “u”, “d”, “l”, and “r” in a local fashion. Figure 3.8,
Part (a), shows an initial configuration for the cells, and Part (b), shows those cells
with their marks. We omit the detailed explanation of the way each cell determines
whether it is a u-cell, or d-cell, etc. These marks are indeed some tokens that each
candidate uses to compete. If the number of u-cells, Nu, is more than that of d-cells,
Nd, along a the segment of c, c wins the competition. If Nu and Nd are equal, the
candidate with higher number of r-cells, Nr, will lose the game. These comparisons
are made by using a token passing scheme very similar to ours, where each cell tries
to forward the token it is holding in the boundary and any two opposite tokens
(here “u” versus “d”, and “r” versus “l”) will be matched once they meet at a cell.
Once these comparisons and token deletions are made for all pairs of candidate cells,
eventually one candidate will be left and become the leader of the whole structure.
The algorithm in [9] works in a synchronous fashion and has linear runtime with
respect to the perimeter of the given structure.
Figure 3.8: Part(a) depicts an example of initial configuration for cells. According to
local rules in [9] each cell marks itself as Part(b). Leader candidates are shown by r′.
29

In Section 4 of this study, the authors outline some required modifications so that
their algorithm works for any arbitrary structure, including those that contain holes.
3.6 Conclusions
We considered the geometric variant of the amoebot model by restricting the
particle structures to form a connected subset on a triangular grid and showed that
for these structures there are local-control protocols for the leader election problem.
We think that the algorithms presented for the geometric amoebot model can be
extended for the case that G is a different regular grid graph embedded in the two-
dimensional Euclidean plane. It is interesting to identify the minimum set of key
geometric properties that G must have in order for the proposed algorithms to work.
30

Chapter 4
SHAPE FORMATION
4.1 Introduction
A central problem for programmable matter is shape formation, and various solu-
tions have already been found for that problem using different approaches like DNA
tiles [50], moteins [21], or nubots [62]. As discussed earlier, our SOPS can be used to
envision systems of nano-sensor devices with very limited computational power, but
which can collaborate to reach a lot more as a collective. Ideally, those nano-sensor
devices will be able to self-organize in order to achieve a desired collective goal with-
out the need of central control or external (in particular, human) intervention. For
example, one could envision using a system of self-organizing nano-sensor devices to
identify and coat (and possibly repair) leaks on a nuclear reactor without the need
for human intervention; self-organizing systems of nano-sensor devices could also be
used to monitor environmental and structural conditions in abandoned mines, on
the exterior of an airplane or spacecraft, bridges and other structures, possibly also
self-repairing the structure— i.e., realizing what has been coined as ”smart paint”.
The applications in the health arena are also endless, e.g., self-organizing nano-sensor
devices could be used within our bodies to detect and coat an area where internal
bleeding occurs, eliminating the need of immediate surgery, or they could be used to
identify and isolate tumor/malignouos cells. In many applications, there may be a
specific shape that one would like the system to assume (e.g., a disc, or a line, or even
an arbitrary convex shape).
31

First, we present an initial algorithm for forming a straight line with the set of
particles. In Section 4.3, we present a general algorithmic framework for more complex
shape formation problems in SOPS, and show direct applications of this framework
to the problems of having the particle system self-organize to form a hexagonal or
triangular shape. Our algorithms utilize only local control, require only constant-size
memory particles, and are asymptotically optimal both in terms of the total number
of movements needed to reach the desired shape configuration.
4.1.1 Our Contributions
In this part of the dissertation, we will use the geometric amoebot model presented
in Section 2 as our basic model for SOPS. We first present a simple local-control
algorithm for the line formation problem, where the goal is for any connected structure
of particles to eventually form a line. We also present a general algorithmic framework
for shape formation problems in SOPS, which constitutes of two basic algorithmic
primitives: the spanning forest primitive and the snake formation primitive. We
present concrete applications of these two primitives to two specific shape formation
problems, namely to the problems of having the system of particles self-organize to
form a hexagonal shape and to form a triangular shape. All the hexagonal shape and
the triangular shape and the line formation algorithms are optimal with respect to
work, which we measure by the total number of particle movements needed to reach
the desired shape configuration, as we prove in Theorems 4, 9, and 7. Our algorithms
rely only on local information (e.g., particles do not have ids, nor do they know n, the
total number of particles, or have any sort of global coordinate/orientation system),
and require only constant-size memory particles.
As before, we assume the standard asynchronous model from distributed comput-
ing, where the system of particles progresses by performing atomic actions, each of
32

which affects the configuration of one or two particles. Whenever a particle is acti-
vated (i.e., performs an atomic action), it can perform an arbitrary bounded amount
of computation (involving its local memory as well as the shared memories with its
neighboring particles) followed by at most one movement. A round is over once every
particle has been activated at least once.
4.2 Line Formation
In a shape formation problem, the set of final configurations consists of those sys-
tem configurations where the particle structure forms the desired shape. As a specific
example of a shape formation problem, we consider the line formation problem. In
the geometric amoebot model, the shape the particles have to form is a straight line
in the equilateral triangular grid and all particles have to be contracted in a final
system configuration. We assume that initially we have an arbitrary connected struc-
ture of contracted particles with a unique particle called a seed. The seed is used as
the starting point for forming the line of particles and specifies the direction in which
this line will grow. Particles organize themselves into a spanning set of disjoint trees.
As the line grows, every particle touched by the line that is already in a valid line
position becomes part of the line. Any other particle connected to the line becomes
the root of a tree of particles. Every root aims at traveling around the line in a
clockwise manner until it joins the line. As a root particle moves, the other particles
in its tree follow in a worm-like fashion (i.e., via a series of handover operations).
Before we give a detailed description of the algorithm, we provide some prelimi-
naries. We distinguish for the state of a particle between inactive, follower, root, and
retired (or halted). Initially, all particles are inactive, except the seed particle, which
is always in a retired state. In addition to its state, each particle p may maintain
a constant number of flags in its shared memory. Recalling from Section 2, for an
33

expanded particle, we denote the node the particle last expanded into as the head of
the particle and call the other occupied node its tail : In our algorithm, we assume
that every time a particle contracts, it contracts out of its tail.
4.2.1 Algorithm
The spanning forest algorithm, given in Algorithm 3, is a basic building block we
use for shape formation problems. This algorithm aims at organizing the particles as
a spanning forest, where the particles that represent the roots of the trees determine
the direction of movement, whom the remaining particles follow. Each particle p
continuously runs Algorithm 3 until p becomes retired. If particle p is a follower, it
stores a flag p.parent in its shared memory corresponding to the edge adjacent to
its parent p′ in the spanning forest (any particle q can then easily check if p is a
child of q). If p is the seed, then it sets the flag p.linedir in the shared memories
corresponding to two of its edges in opposite directions (i.e., an edge i and the edge
that appears three positions after i in clockwise order), denoting that it would like to
extend the line through the directions given by these edges. Figure 4.1 depicts some
snapshots of a run of line formation algorithm.
34

Algorithm 3 Spanning Forest Algorithm for Line Formation Problem
SpanningForest (p): Particle p acts as follows, depending on its current state:
inactive: If p is connected to a retired particle, then p becomes a root particle.
Otherwise, if an adjacent particle p′ is a root or a follower, p sets the
flag p.parent on the shared memory corresponding to the edge to p′ and
becomes a follower. If none of the above applies, it remains inactive.
follower: If p is contracted and connected to a retired particle, then p becomes a
root particle. Otherwise, it considers the following three cases: (i) if p
is contracted and p’s parent p′ (given by the flag p.parent) is expanded,
then p expands in a handover with p′, adjusting p.parent to still point
to p′ after the handover; (ii) if p is expanded and has a contracted child
particle p′, then p executes a handover with p′; (iii) if p is expanded,
has no children, and p has no inactive neighbor, then p contracts.
root: Particle p may become retired following CheckRetire (p). Otherwise,
it considers the following three cases: (i) if p is contracted, it tries to
expand in the direction given by LineDir(p); (ii) If p is expanded and
has a child p′, then p executes a handover contraction with p′; (iii) if
p is expanded and has no children, and no inactive neighbor, then p
contracts.
retired: p performs no further action.
CheckRetire (p):if p is a contracted root then
if p has an adjacent edge i to p′ with a flag p′.linedir, where p′ is retired then
Let i′ be the edge opposite to i in clockwise order
p sets p.linedir in the shared memory of edges i and i′ and becomes retired.
LineDir(p):Let i be the label of an edge connected to a retired particle.
while edge i points to a retired particle do
i ← label of next edge in clockwise directionreturn i
35

Figure 4.1: Snapshots of the line formation algorithm. The seed particle is green, retired
particles are black, roots are red and followers are blue.
In the following section we analyze our line formation algorithm, first analyzing
the Spanning Forest algorithm, in general, and then the line formation algorithm.
4.2.2 Analysis for Line Formation Problem
We first generally analyze the correctness of the spanning forest algorithm as the
building block we use in all our shape formation problems. We refer to this correctness
proof later once it is needed.
Spanning Forest Algorithm Analysis
Once an inactive particle changes its state (into either a root or a follower), we
say it becomes active. Also, as specified in Algorithm 3, only followers can set the
flag p.parent. The first three lemmas demonstrate some properties that hold during
the execution of the spanning forest procedure and will be used later in Section 4.2.2
36

to analyze the complete proposed algorithm, when we incorporate the check for re-
tirement of particles according to the line formation problem, and the propagation of
the line direction.
Recall that the configuration of the system of particles at time t consists, for
every particle p, of the current state of p, including whether the particle is expanded
or contracted, of any flags in p’s shared memory, and of the node(s) p occupies in
Geqt (given by the relative position of p according to the other particles) at time t,
as well as the labeling of the bonds of p. Following the asynchronous model, the
system of particles progresses by performing atomic actions, each of which affects the
configuration of one or two particles.
Lemma 4. For a follower p, the node indicated by p.parent is occupied by an active
particle.
Proof. Consider a follower p in any configuration during the execution of Algorithm 3.
Note that p can only become a follower from an inactive state, and once it leaves the
follower state it will not switch to that state again. Consider the first configuration
c1 in which p is a follower. In the configuration c0 immediately before c1, p must
be inactive and it becomes a follower because of an active particle p′ occupying the
position indicated by p.parent in c0. The particle p′ is still adjacent to the edge
flagged by p.parent in c1. Now assume that p.parent points to an active particle
p′ in a configuration ci, and that p is still a follower in the next configuration ci+1
that results from executing an action a. If a affects p and p′, the action must be a
handover in which p updates its flag p.parent such that p.parent may be moved to
the edge that now connects p to p′ in ci+1. If a affects p but not p′, it must be a
contraction in which p.parent does not change and still points to p′. If a affects p′
but not p, there are multiple possibilities. The particle p′ might switch from follower
37

to root state, or from root to retired state, or it might expand, none of which violates
the lemma. Furthermore, p′ might contract. If p.parent points to the head of p′, p′ is
still adjacent to the edge flagged by p.parent in ci+1. Otherwise, p is a child adjacent
to the tail of p′ in ci and therefore the contraction must be part of a handover. As
p is not involved in the action, the handover must be between p′ and a third active
particle p′′. It is easy to see that after such a handover p.parent points to either p′
or p′′. Finally, if a affects neither p nor p′, p.parent will still point to p′ in ci+1.
Based on Lemma 4, we define a directed graph A(c) for a configuration c as follows.
A(c) contains the same nodes as the nodes occupied in Geqt by the set of particles in
c. For every expanded particle p in c, A(c) contains a directed edge from the tail to
the head of p, and for every follower p′ in c, A(c) contains a directed edge from the
head of p′ to p′.parent.
Lemma 5. The graph A(c) is a forest, and if there is at least one active particle,
every connected component of inactive particles contains a particle that is connected
to an active particle.
Proof. In an initial configuration c0, all particles are inactive and therefore the lemma
holds trivially. Now assume that the lemma holds for a configuration ci. We will show
that it also holds for the next configuration ci+1 that results from executing an action
a. If a affects an inactive particle p, this particle either becomes a follower or a root.
In the former case p joins an existing tree, and in the latter case p forms a new
tree in A(ci+1). In either case, A(ci+1) is a forest and the connected component of
inactive particles that p belongs to in ci is either non-existent or connected to p in
ci+1. If a affects only a single particle p that is in state follower, this particle can
contract or become a root. In the former case, p has no child p′ such that p′.parent
is the tail of p and also p has no inactive neighbors. Therefore, the contraction of
38

p does not disconnect any follower or inactive particle and, accordingly, does not
violate the lemma. In the latter case, p becomes a root of a tree which also does not
violates the lemma. If a involves only a single particle p that is in state root, p can
expand or contract or become retired. An expansion and becoming retired trivially
cannot violate the lemma and the argument for the contraction is the same as for the
contraction of a follower above. Finally, if a involves two active particles in ci, these
particles perform a handover. While such a handover can change the parent relation
among the nodes, it cannot violate the lemma.
The following lemma shows that the spanning forest always makes progress, by
showing that as long as the roots keep moving, the remaining particles will eventually
follow.
Lemma 6. An expanded particle eventually contracts.
Proof. Consider an expanded particle p in a configuration c. Note that p must be
active. If there is an enabled action that includes the contraction of p, that action
will remain enabled until p eventually contracts when p is validated in the current
round. So assume that there is no enabled action that includes the contraction of p.
According to Lemma 5 and the transition rule from inactive to active particles, at
some point in time all particles in the system will be active. If the contraction of p
becomes part of an enabled action before this happens, p will eventually contract. So
assume that all particles are active but still p cannot contract. If p has no children,
the isolated contraction of p is an enabled action which contradicts our assumption.
Therefore, p must have children
Furthermore, p must read at least one child p′ having its p′.parent flag pointing
towards p over its tail and all children having their parent flags pointing towards p’s
tail must be expanded as otherwise p could again contract as part of a handover. If p′
39

would contract, a handover between p′ and p would become an enabled action. We can
apply the complete argument presented in this proof so far to p′ and so on backwards
along a branch in a tree in A(c) until we reach a particle that can contract. We
will reach such a particle by Lemma 5. Therefore, we found a sequence of expanded
particles that starts with p′ and ends with a particle that eventually contracts. The
contraction of that last particle will allow the particle before it in the sequence to
contract and so on. Finally, the contraction of p will become part of an enabled action
and therefore p will eventually contract.
In the above lemmas, the direction of expansion of roots is not used. Furthermore,
the fact which particles become roots is also not an issue. Therefore, the algorithm
works independently of the selection of roots and their expansion direction. This
makes the spanning forest algorithm a reusable algorithmic primitive.
Line Formation Correctness Analysis
Now, we can show that the algorithmic primitives as developed in the Section 4.2
decide the line formation problem.
Theorem 4. Algorithm 3 correctly decides the line formation problem.
Proof. We need to show that the algorithm terminates (while each particle decides to
halt) and that when it does, the formed shape is a straight line. According to Lemma 5
and due to the transition rule from inactive to active particles, every particle p even-
tually becomes active, i.e., switches from inactive state. According to spanning forest
analysis, Lemmas 4 to 6, as long as the roots keep moving the remaining particles will
eventually follow and the spanning forest always makes progress. According to the
algorithm proposed for line formation problem, if p is adjacent to the seed particle,
it becomes a root and moves in a clockwise manner around the current formed line
40

structure until it eventually reaches one of the valid positions that can extend the line
and becomes retired. By contradiction, assume p never becomes retired. Since the
number of particles is bounded (and therefore the size of the current line structure is
bounded), there must be an infinite number of configurations ci where p had a root
particle blocking its desired clockwise movement around the line structure. Let p′
be the last root p sees as its clockwise neighbor over the line structure (since once
a particle becomes a root, it will stay connected to the line structure and always
attempt to move in a clockwise manner, p′ is well-defined). Applying the same argu-
ment inductively to p′, we will get an infinite sequence of roots on the line structure
that never touch a valid spot pointed by one of p.linedir flags of an already retired
particle, a contradiction, since the current line structure (and the number of retired
particles) is bounded. Therefore, every root eventually changes into a retired state.
From Algorithm 3, every follower in the neighborhood of a retired particle becomes
a root. For every root q with at least one follower child, let c be the first configuration
when q becomes retired. If q still has any child in c then all of its children p become
roots. Applying this argument recursively we will reach to a configuration such that
there exists no root q having a follower child which proves that eventually every
follower becomes a root.
Putting it all together, eventually all particles become retired and the algorithm
terminates. It should be noted that according to the proposed algorithm once a
particle becomes retired it does not move anymore (halts). Note that it also follows
from the argument above that the set of retired particles at the end of the algorithm
forms a connected structure (since the particles start from a connected configuration
and never get disconnected through the process). The connected structure must form
a line, since a root particle may only become retired if it is contracted and it now
occupies a previously unoccupied spot following the direction of the line.
41

Line Formation Work Analysis
Now, we evaluate the performance of our algorithm in terms of the number of
movements (expansions and contractions) of the particles, i.e., the total work per-
formed by the algorithm.
Lemma 7. The worst-case work required by Algorithm 3 to solve the line formation
problem is Ω(n2).
Proof. Assume the initial configuration of the set of particles forms a connected struc-
ture of diameter at most 2√n+2 (e.g., if it forms a hexagonal or square shape in Geqt).
Since the line has diameter equal to n−1, there must exist some particle that will need
to traverse a distance of at least 12n−2√n−3, a second particle that will traverse a dis-
tance of 12n−2
√n−4, etc., irrespective of the algorithm used. The number of particle
movements incurred will be at least∑ 1
2n−2√n−1
i=1 (12n− 2
√n− i− 2) = Θ(n2).
In the following, we will show a matching upper bound:
Theorem 5. Algorithm 3 terminates in O(n2) work.
Proof. To prove the upper bound, we simply show that every particle executes O(n)
movements. The theorem then follows. Consider a particle p. While p is in inactive
or a retired state, it does not move. Let c be the first configuration when p becomes a
follower. Consider the directed path in A(c) from the head of p to its root p′. There
always is a such a path since every follower belongs to a tree in A(c) by Lemma 5 Let
P = (a0, a1, . . . , am) be that path in A(c) where a0 is the head of p and am is a child of
p′. According to Algorithm 3, p attempts to follow P by sequentially expanding into
the nodes a0, a1, . . . , am. The length of this path is bounded by 2n and, therefore, the
number of movements p executes while being a follower is O(n). Once p becomes a
root, it only performs expansions and contractions around the currently constructed
42

line structure, until it reaches one of the valid positions on the line. Since the total
number of retired particles is at most n, this leads to an additional O(n) movements
by p. Therefore, the number of movements a particle p executes is O(n), which
concludes the theorem.
4.3 An Algorithmic Framework for Shape Formation Problems in SOPS
In this section, we focus on solving more complex shape formation problems in the
geometric amoebot model starting from any well-initialized connected configuration of
particles. We present a general algorithmic framework for shape formation problems
and then specifically we investigate the Hexagonal Shape Formation (HEX) and the
Triangular Shape Formation (TRI) problems where the desired shape is a hexagon
and a triangle respectively. We formally define a shape formation problem as a
tuple M = (I,G) where I and G are sets of connected configurations of contracted
particles. We say I is the set of permitted initial configurations and G is the set of
goal configurations. We present a general algorithmic framework for shape formation
problems and then specifically investigate the Hexagonal Shape Formation (HEX) and
the Triangular Shape Formation (TRI) problems, where G would be all configurations
of contracted particles where the positions of the set of particles induce the largest
possible complete hexagon, or the largest possible complete triangle, respectively,
on Geqt. We say that an algorithm A decides a shape formation problem M, if
for any initial configuration from I, all executions of A eventually reach one of the
valid configurations in G without losing connectivity, and whenever such a system
configuration is reached for the first time, the system stays there and all particles
decide to perform no further actions.
As in the line formation problem, for all algorithms we assume that we have a
seed particle, which provides the starting point for constructing the respective shape.
43

We again distinguish for the state of a particle between inactive, follower, root, and
retired. Initially, all particles are inactive, except the seed particle, which is always
in a retired state. In addition to its state, each particle p may maintain a constant
number of flags in its shared memory. We also assume that every time a particle
contracts, it contracts out of its tail.
Generally speaking, the shape formation algorithms we propose progress as fol-
lows. Particles organize themselves into a spanning set of disjoint trees where the
roots of the trees are non-retired particles adjacent to the partially constructed shape
structure (consisting of all retired particles). Root particles lead the way by moving
in a predefined direction around the current structure.
The remaining particles (i.e., the followers) follow behind the leading root par-
ticles, hence the system flattens out towards the direction of movement. Once the
leading particles reach a valid position where the shape can be extended (following
the rules for the snake formation for the particular shape), they stop moving and
change their state to retired as well. This process continues until all particles become
retired. Note that the spanning forest component of this general approach is the same
for any shape formation algorithm: It is only in the rules that determine the next
valid position to be filled in the shape structure being built that the respective algo-
rithms differ. We determine the next valid position to be filled sequentially following
a snake (i.e., a line of consecutive positions in Geqt), that fills in the space of the
respective shape structure and scales naturally with the number of particles in the
system.
In order to characterize the snake formation for a given shape formation problem,
one only needs to specify the direction in which the line of particles forming the
snake should continue to grow, for each new particle added to the snake. Hence once
a particle finds the next valid position on the snake, it will become retired and set its
44

snake direction accordingly. Different rules for snake formation will realize different
shapes.
4.3.1 Algorithm and Analysis
Spanning Forest Algorithm The Spanning Forest algorithm primitive, given in
Algorithm 4, is a building block we use for all of our shape formation problems. This
primitive was also used in Section 4.2, where we present a preliminary self-organizing
algorithm for forming a straight line of particles. We present the algorithm here for
completeness, with the root condition translated to our shape formation framework.
Each particle p continuously runs Algorithm 4 until it becomes retired. If particle p
is a follower, it stores a flag p.parent in its shared memory corresponding to the edge
adjacent to its parent p′ in the spanning forest (any particle q can then easily check
if p is a child of q).
Initially all system particles, except the seed, are inactive. In a nutshell, the
particles that are touching the seed or other retired particle become roots; the root
particles move around the partially constructed shape structure in a clockwise manner
until they find a valid position on the snake and become retired; follower particles
follow the movement of the respective root until they become roots themselves. As
we will see later, the initial snapshots of Figures 4.3 and 4.4 illustrate the spanning
forest formation for the respective initial particle configurations.
Note that proofs concerning the general correctness of the spanning forest algo-
rithm have been presented in Section 4.2.2. For space sake, we don’t present them
again but we refer to them to analyze the complete proposed algorithm.
45

Algorithm 4 Spanning Forest Algorithm for Shape Formation
Depending on p’s current state, a particle p behaves as described below:
inactive: If p is connected to a retired particle, then p becomes a root particle.
Otherwise, if an adjacent particle p′ is a root or a follower, p sets the
flag p.parent on the shared memory corresponding to the edge to p′ and
becomes a follower. If none of the above applies, it remains inactive.
follower: If p is contracted and connected to a retired particle, then p becomes
a root particle. Otherwise, it considers the following three cases: (i) if
p is contracted and p’s parent p′ is expanded, then p expands in the
direction given by p.parent in a handover with p′, and may need to
adjust p.parent to still point to particle p′ after the handover; (ii) if p
is expanded and has a contracted child particle p′, then p executes a
handover with p′; (iii) if p is expanded, has no children, and p has no
inactive neighbor, then p contracts.
root: Particle p runs the corresponding snake formation algorithm (Algo-
rithm 5 or 6, for HEX or TRI resp.), and becomes retired accordingly.
Otherwise, it considers the following three cases: (i) if p is contracted,
it tries to expand in the direction given by RootDirection (p); (ii)
If p is expanded and has a child p′, then p executes a handover contrac-
tion with p′; (iii) if p is expanded and has no children, and no inactive
neighbor, then p contracts.
retired: p performs no further action.
RootDirection (p):
Let i be the label of an edge connected to a retired particle.
while edge i points to a retired particle do
i ← label of next edge in clockwise direction
return i
46

Hexagonal Shape Formation We now investigate the Hexagonal Shape Forma-
tion (HEX) problem where the system of particles has to assume the shape of a
hexagon (but for the outer layer, which may not be completely full) in Geqt. The
hexagon will be constructed around the seed particle. Note that a hexagon in Geqt is
actually a disk, since it can be defined by the set of all nodes of Geqt within a certain
distance r from a seed node.
We will organize the particles according to a spiral snake structure which will
incrementally add new layers to the hexagon, scaling naturally with the number of
particles in the system. In order to characterize the snake formation for a given
shape formation problem, one only needs to specify the direction in which the line
of particles forming the snake should continue to grow, for each new particle added
to the snake. Hence once a particle finds the next valid position on the snake, it will
become retired and set the snake direction accordingly (by correctly setting the flag
p.snakedir on the respective edge). Different rules for snake formation will realize
different shapes. In particular, Algorithm 5 specifies the rules for the spiral snake
formation for HEX.
Initially, the seed particle p sets the flag p.snakedir in the shared memory cor-
responding to one of its adjacent edges (e.g., the edge with label 0). Any particle
adjacent to a retired particle becomes a root following the spanning forest algorithm.
Each root p moves in a clockwise fashion around the structure of retired particles until
it finds the next position to extend the hexagonal snake (i.e., a position connected
to a retired particle via an edge flagged p.snakedir) and becomes retired, following
Algorithm 5 (see Figure 4.2).
47

Figure 4.2: shows an intermediate configuration of the HEX algorithm. The seed is depicted
in green, retired particles are black, and roots are red. Particle p is the last added particle
to the retired structure. Hence, edge i connects p to the retired particle p′ (edge i has
the flag p′.snakedir). The red arrow depicts the process of setting p.snakedir in clockwise
manner for p.
Algorithm 5 Snake Formation for HEX
if p is a contracted root then
if p has an adjacent edge i to p′ with a flag p′.snakedir, where p′ is retired then
while edge i is connected to a retired particle do
i ← label of next edge in clockwise direction
p sets the flag p.snakedir for edge i
p becomes retired.
Figure 4.3 depicts some snapshots of a run of HEX algorithm.
Analysis for HEX problem
Here, we show that the algorithmic primitives proposed in Section 4.3.1 solve the
HEX problem correctly.
Theorem 6. Our algorithm decides the HEX problem.
Proof. We need to show that the algorithm terminates and that when it does, the
system is in the shape of a hexagon. According to Lemma 5 and the transition rule
48

from inactive to active particles, every particle p eventually activates. According
to spanning forest analysis, Lemmas 4 to 6, as long as the roots keep moving the
remaining particles will eventually follow. According to the algorithm proposed for
hexagonal shape formation problem, if p is adjacent to the retired structure (initially
the structure only contains the seed particle), it becomes a root and moves in a
clockwise manner around the retired structure until it eventually reaches the valid
position that can extend the hexagon and becomes retired. By contradiction, assume
p never becomes retired. Since the number of particles is bounded (and therefore the
size of the formed retired structure is bounded), there must be an infinite number of
configurations ci where p had a root particle blocking its desired clockwise movement
around the hexagonal retired structure. Let p′ be the last root p sees as its clockwise
neighbor over the retired structure (since once a particle becomes a root, it will
stay connected to the hexagonal retired structure and always attempt to move in a
clockwise manner, p′ is well-defined). Applying the same argument inductively to p′,
we will get an infinite sequence of roots on the retired structure that never touch a
valid spot pointed by q.snakedir flag of an already retired particle q, a contradiction,
since the current retired structure (and the number of retired particles) is bounded.
Therefore, every root eventually changes into a retired state. From Algorithm 4,
every follower in the neighborhood of a retired particle becomes a root. For every
root q with at least one follower child, let c be the first configuration when q becomes
retired. If q still has any child in c then all of its children p become roots. Applying
this argument recursively we will reach to a configuration such that there exists no
root q having a follower child which proves that eventually every follower becomes a
root. Putting it all together, eventually all particles become retired and the algorithm
terminates and all particles halt.
49

Note that it also follows from the argument above that the set of retired particles
at the end of the algorithm forms a connected structure (since the particles start from
a connected configuration and never get disconnected through the process).
Now, we need to prove the correctness, i.e., that the resulting structure of re-
tired particles is in a hexagonal form. Initially the hexagon only contains the seed
particle, therefore the claim holds trivially. By induction, let’s assume c is the first
configuration in which the current formed structure of the retired particles contains k
retired particles and by induction hypothesis, assume that those particles form a valid
hexagonal shape using k particles. According to Algorithm 5, the only way a root p
can become the (k + 1)th retired particle during or after c, is if it occupies the next
valid position pointed by the flag q.snakedir, where q was the k-th particle to join the
hexagonal shape. According to induction hypothesis, the k first retired particles form
a hexagonal shape. By pointing to the next adjacent position in counter-clockwise
direction around the outermost retired particles in the current hexagonal structure,
the flag q.snakedir points to the next position (according to counter-clockwise direc-
tion) on the last formed layer of the retired structure, or to a starting position on the
next layer once the current layer is full, proving the correctness of the constructed
shape.
We would like to measure the amount of the work of the proposed algorithm.
Lemma 8. The worst-case work required by any algorithm to solve the HEX problem
is Ω(n2).
Proof. Consider a line of n particles on Geqt, where the seed particle is located on
one end of the line, as an initial configuration of the particles. We label the particles
connected to the seed starting with number 0 for the particle adjacent to the seed. The
particle labeled i > 1 requires at least 2(i−1−d(i− 1)/Mi−1e) ≥ 2(i−1−d(i− 1)/6e)
50

movements until it can lie contracted on the retired structure where Mj, Mj ≥ 6 and
j ≥ 1, indicates the capacity (i.e., the number of the retired particles) of the layer
that the retired particle with label j belongs to. Therefore, any algorithm requires at
least 2∑n−1
i=2 (i− 1− d(i− 1)/6e) = Ω(n2) work.
Recalling from Section 4.2.2 of the dissertation, and according to Lemma 4, con-
sider the directed graph A(c) for a configuration c as follows. A(c) contains the same
nodes as the nodes occupied in Geqt by the set of particles in c. For every expanded
particle p in c, A(c) contains a directed edge from the tail to the head of p, and for
every follower p′ in c, A(c) contains a directed edge from the head of p′ to p′.parent.
Theorem 7. The algorithm proposed for HEX terminates in O(n2) work.
Proof. To prove the upper bound, we simply show that every particle executes O(n)
movements. The theorem then follows. Consider a particle p. While p is in inactive
or a retired state, it does not move. Let c be the first configuration when p becomes a
follower. Consider the directed path in A(c) from the head of p to its root p′. There
always is such a path since every follower belongs to a tree in A(c) by Lemma 5 . Let
P = (a0, a1, . . . , am) be that path in A(c) where a0 is the head of p and am is a child of
p′. According to Algorithm 4, p attempts to follow P by sequentially expanding into
the nodes a0, a1, . . . , am. The length of this path is bounded by 2n and, therefore, the
number of movements p executes while being a follower is O(n). Once p becomes a
root, it only performs expansions and contractions around the retired structure until
it reaches one of the valid positions on the hexagon. Since each root p and a retired
particle q never connect from the same edge of q more than twice, and since the total
number of retired particles is at most n, therefore the number of movements is bound
to O(n) for p. Therefore, the number of movements a particle p totally executes is
O(n), which concludes the theorem.
51

Triangular Shape Formation Now we investigate the Triangular Shape Forma-
tion problem (TRI) where the system of particles has to assume a final triangular
shape on Geqt (but for possibly the outer layer).
As we discussed for the HEX problem, in order to solve the TRI problem in our
Spanning Forest + Snake Formation algorithmic framework, one only needs to setup
the correct rules for growing a ”triangular snake”, which will be accomplished by
Algorithm 6. The snake formation rules for the TRI problem are more complex than
the ones we had for the HEX problem, since we will need to explicitly take into account
the formation of different layers of particles as we build the triangular structure (this
is implicitly taken care by the spiral formation in the HEX algorithm). The TRI
snake construction will start from the seed particle p, which will occupy one of the
triangle corners. The seed will mark two of its adjacent edges as eL and eR, which will
determine the direction along which two of the sides (L and R) of the triangle will be
formed, by setting p.border[left] and p.border[right] flags on the corresponding edges
(we arbitrarily pick the edges will labels 0 and 1 out of p in our algorithm). These
directions will be propagated by the particles that end up on L and R resp. The
seed starts the snake formation by setting the flag p.snakedir on its 0-labeled edge.
From there on, Algorithm 6 will build the triangle snake layer by layer, alternating
going ”to the left” and ”to the right” as the snake places particles on R and L resp.
Every time the snake touches one of the sides (Case 2 of Algorithm 6), it sets up the
rules for starting a new layer by setting the snake direction flags accordingly, first
on the last particle of a layer (the one that just touched the border, in Case 2) and
then on the first particle of the newly formed layer (Case 3). If a new layer is not
needed, the snake proceeds to fill additional positions on the current layer (Case 1).
Figure 4.4 illustrates this approach through some snapshots of the execution of the
TRI algorithm.
52

Algorithm 6 Snake Formation for TRI
if p is a contracted root then
if p has an adjacent edge i to p′ with a flag p′.snakedir, where p′ is
retired then . retired condition
bordertype = Border (p)
if bordertype = null then
. Case 1: continue on the same layer
p sets p.snakedir for edge opposite to i (i.e., edge (i+3) mod 6)
else
Let q be the border particle connected to p
Let j be the edge of p opposite to the edge connecting p to q
p sets p.border[bordertype] on edge j
if p′ 6= q then
. Case 2: start a new layer
p sets p.snakedir for edge j
else
. Case 3: snake direction from border
if bordertype = left then
p sets p.snakedir for edge (i+ 5) mod 6
else
p sets p.snakedir for edge (i+ 1) mod 6
p becomes retired
Border (p):
if p has an adjacent edge k to a particle q with a flag q.border[bordertype], where
bordertype ∈ left, right then
return bordertype
else
return null
53

Figure 4.3: Snapshots of the HEX algorithm. The seed is green, retired particles are black,
roots are red and followers are blue.
Analysis for TRI problem Now we need to show that the algorithmic primitives
presented in Section 4.3.1 decides the TRI problem correctly, in worst-case optimal
O(n2) work.
Theorem 8. Our algorithm decides the TRI problem.
Proof. Again, we need to show that the algorithm terminates and that when it does,
the system is the shape of a triangle. The termination part of the proof is identical
to that for the HEX problem presented in Theorem 6, and hence it only remains to
prove the correctness of the TRI algorithm. Assume we have three particles as the
base case (to build the smallest size perfect triangle on Geqt). The seed p∗ sets the
p ∗ .snakedir flag and the p ∗ .border[left] flag on its 0-labeled edge. A root particle
q might have to move around the seed p∗ until it connects to edge 0 of the seed
through an edges i. Since p sees both (border and snake) flags coming from the same
particle, p becomes retired while it start constructing a new layer of the triangle and
54

Figure 4.4: Snapshots of the TRI algorithm. The seed is green, retired particles are black,
roots are red and followers are blue.
sets its p.snakedir flag such that the next particle continues filling this newly added
layer (Case 3 of Algorithm 6). Particle p also sets p.border[left] appropriately to
propagate the inherited direction of the border from the seed to next layer. The only
position that the third particle can stop on Geqt is the one pointed by p.snakedir
and it is trivial to see that the resulting retired structure of the three particles is
in a triangular shape. Let c be the first configuration in which the current formed
structure of the retired particles contains k retired particles, and let q denote the (k)th
particle to become retired. By induction hypothesis, assume that those k particles
form a triangle. According to Algorithm 6, the only way a root p can become the
(k + 1)th retired particle during or after c, is if it occupies the valid position pointed
by a flag q.snakedir. Depending on the location of q in the triangle, three cases may
arise. First, consider the case when q is a left border particle (an analogous argument
works if q is a right border particle). Since q is the last particle added to the current
55

valid triangular shape, we either have a perfect triangle after the addition of q or
we have a perfect triangle plus particle q as the leftmost particle on a newly created
layer. In the former case, given the next position pointed by q.snakedir, the root
p follows Case 2 of algorithm, which means that p will retire on the leftmost valid
position on the next layer of the triangular structure, pointed by q.border[left]. In
the latter, p follows Case 3 and will fill another position of the current layer next to
q. In both cases the resulting retired structure still forms a valid triangular shape.
Second, consider the situation where q is not a border particle (Case 1). Therefore, q
is located on the last partially filled layer and q.snakedir is set to point to the next
unoccupied snake spot on that layer, which is then filled by p, correctly extending
the triangular structure, and proving the claim.
We measure the work of the proposed algorithm as follow:
Lemma 9. The worst-case work required by any algorithm to solve the TRI problem
is Ω(n2).
Proof. With a very similar argument we had in Lemma 8 one can verify that it is
required to have at least 2∑n−1
i=1 (i− 1− d(i− 1)/2e) = Ω(n2) work for the algorithm
to terminate.
Theorem 9. The algorithm for TRI terminates in O(n2) work.
Proof. The argument for required amount of work to form a triangular shape will
be very similar to that of a hexagonal shape. To prove the upper bound, we show
that every particle executes O(n) movements. The theorem then follows. Consider a
particle p. While p is in inactive or a retired state, it does not move. Let c be the first
configuration when p becomes a follower. Consider the directed path in A(c) from
the head of p to its root p′. There always is such a path since every follower belongs
56

to a tree in A(c) by Lemma 5 . Let P = (a0, a1, . . . , am) be that path in A(c) where
a0 is the head of p and am is a child of p′. According to Algorithm 4, p attempts to
follow P by sequentially expanding into the nodes a0, a1, . . . , am. The length of this
path is bounded by 2n and, therefore, the number of movements p executes while
being a follower is O(n). Once p becomes a root, it only performs expansions and
contractions around the retired structure until it reaches one of the valid positions on
the triangle. Since each root p and a retired particle q never connect from the same
edge of q more than twice, and since the total number of retired particles is at most
n, therefore the number of movements is bound to O(n) for p. Therefore, the number
of movements a particle p totally executes is O(n), which concludes the theorem.
4.4 Conclusions
We presented a simple algorithm for forming a straight line of particles in geomet-
ric amoebot model. We analyzed the correctness of the algorithm and evaluated its
performance with respect to worst-case number of particles movements required for
termination. We then presented a general algorithmic framework for more complex
shape formation problems in SOPS that combines our spanning forest algorithmic
primitive with a snake formation primitive. We have shown that by carefully deter-
mining how to grow the appropriate snake structure, we were able to solve the HEX
and TRI problems. We can easily extend our snake primitive to build other shapes,
such as square or rectangular shapes. It would be interesting to characterize all the
general shapes that could be solved with our approach on Geqt (and possibly also for
other infinite regular grid graphs, namely the square grid graph and the hexagonal
grid graph, if we considered those as the underlying graph G in the geometric amoe-
bot model). Finally, we evaluated the performance of our HEX and TRI algorithms
in terms of the worst-case amount of work necessary for termination.
57

In [33] we study another interesting problem related to shape formation in SOPS
where we present a universal shape formation algorithm which takes an arbitrary
shape composed of a constant number of equilateral triangles of unit size and lets
the particles build that shape at a scale depending on the number of particles in the
system.
58

Chapter 5
IMPOSSIBILITY RESULTS IN GENERAL AMOEBOT MODEL
5.1 Introduction
As we have seen in Section 4, a central problem for programmable matter is shape
formation. In order to determine how decentralized shape formation can be handled,
we are particularly interested in the connection between leader election and shape
formation. Many problems like the consensus problem (all particles have to agree
on some output value) can easily be solved once the leader election problem can be
solved. The same has also been observed for shape formation, as most shape formation
algorithms depend on some seed element. However, the question is whether shape
formation can even be solved in circumstances where leader election is not possible.
The aim of this section is to shed some light on the dependency between leader
election and shape formation by focusing on the special problem of forming a line
of particles using a local-control protocol that we studied in Section 4.2. Here we
discuss the limitations of solving these problems within the general amoebot model.
Of course, in the general amoebot model a straight line is not well-defined. Hence,
for this model the set of final configurations for the line formation problem is defined
to consist of all system configurations in which the particles form a simple path in G.
Note that the leader election problem is well defined for the general amoebot model.
5.2 Impossibility Results
For the general amoebot model, we can show that neither leader election nor
shape formation can be decided by any distributed algorithm. Suppose that there is
59

a distributed algorithm solving the line formation problem in the general amoebot
model (when starting in a well-initialized configuration). Since in this case it is
possible to decide when G|A, where A ⊆ V is the set of occupied nodes in Geqt,
forms a line, it is also possible to design a protocol that solves the leader election
problem: once the line has been formed, its two endpoints contend for leadership
using tokens with random bits sent back and forth until one of them wins. On the
other hand, one can deduce from [42] that in the general amoebot model there is
no distributed algorithm that can decide when a leader has been elected (with any
reasonable success probability). More concretely, in [42] the authors show that for the
ring of anonymous nodes there is no algorithm that can correctly decide the leader
election problem (or in their words, that can solve the leader election problem with
distributive termination) with any probability α > 0, i.e., for any algorithm in which
the particles are guaranteed to halt, the error probability is unbounded. Since in
the general amoebot model G can be any graph, we can set G to be a ring whose
size is the number of particles and the result of [42] is directly applicable. Hence,
there cannot be a distributed algorithm deciding the line formation problem (with
any reasonable success probability) in the general amoebot model, and therefore not
even an algorithm for solving it since a protocol solving the problem could easily be
transformed into a protocol deciding it. However, as we showed in Section 3, for the
geometric amoebot model there is a distributed algorithm that can decide the leader
election problem, i.e., at the end we have exactly one leader and the leader knows
that it is the only leader left. We can use this algorithm to choose a unique leader as
the seed particle for the line formation problem.
60

5.3 Conclusions
Prior results on leader election imply that in the general amoebot model there
are instances in which leader election cannot be solved by local-control protocols.
Additionally, we have shown that if there is a local-control protocol that solves the
line formation problem, then there is also a protocol that solves the leader election
problem, which implies that in the general amoebot model also the line formation
problem cannot be solved by a local-control protocol.
61

Chapter 6
UNIVERSAL COATING
6.1 Introduction
Today, engineers often need to visually inspect bridges, tunnels, wind turbines
and other large civil engineering structures for defects — a task that is both time-
consuming and costly. In the not so distant future, smart coating technology could
do the job faster and cheaper, and increase safety at the same time. The idea behind
smart coating (also coined smart paint) is to have a thin layer of a specific substance
covering the object so that one can measure a certain condition (like temperature or
cracks) at any spot on the surface of the object without requiring direct access to that
spot. Also in nature, smart coating occurs in various situations. Prominent examples
are proteins closing wounds, antibodies surrounding bacteria, or ants surrounding
food in order to transport it to their nest. So one can envision a broad range of
coating applications for programmable matter in the future. We intend to study
coating problems in the context of self-organizing programmable matter consisting
of simple computational elements, called particles, that can establish and release
bonds and can actively move in a self-organized way. As a basic model for these self-
organizing particle systems, we will use the geometric version of the amoebot model
presented in Section 2.
6.1.1 Universal Coating Problem
In the universal coating problem we consider an instance (P,O) where P represents
the particle system and O represents the fixed object to be coated. Let V (P ) be the
62

set of nodes occupied by P and V (O) be the set of nodes occupied by O (when clear
from the context, we may omit the V (·) notation). Then let the set of nodes in Geqt
neighboring O be called the surface (coating) layer. Let n be the number of particles
and B1 be the number of nodes in the surface layer. For any two nodes v, w ∈ Veqt, the
distance d(v, w) between v and w is the length of the shortest path in Geqt from v to
w. The distance d(v, U) between a v ∈ Veqt and U ⊆ Veqt is defined as minw∈U d(v, w).
An instance is valid if the following properties hold:
1. The particles are all contracted and are initially in an idle state.
2. The subgraphs of Geqt induced by V (O) and V (P ) ∪ V (O), respectively, are
connected, i.e., there is a single object and the particle system is connected to
the object.
3. The subgraph of Geqt induced by Veqt \ V (O) is connected, i.e., the object O
has no holes.1
4. Veqt \ V (O) is 2(d nB1e + 1)-connected, i.e. O cannot form tunnels of width less
than 2(d nB1e+ 1).
Note that a width of at least 2d nB1e is needed to guarantee that the object can be
evenly coated. See Figure 6.1 for an example of an object with a tunnel of width 1.
The coating of narrow tunnels requires specific technical mechanisms that complicate
the protocol without contributing to the basic idea of coating, so we ignore such cases
in favor of simplicity and a clean presentation.
A configuration C is legal if and only if all particles are contracted and
minv∈Veqt\(V (P )∪V (O))
d(v, V (O)) ≥ maxv∈V (P )
d(v, V (O))
1If O does contain holes, we consider the subset of particles in each connected region of Veqt\V (O)
separately.
63

Figure 6.1: An example of an object with a tunnel of width 1.
meaning that all particles are as close to the object as possible or coat O as evenly as
possible. If the object has to be coated by more than one layer of particles then the
i-th layer around the object are the nodes that have a distance of i to the object.
An algorithm solves the universal coating problem if, starting from any valid
configuration, it reaches a stable legal configuration C in a finite number of rounds.
A configuration C is said to be stable if no particle in C ever performs a state change
or movement.
6.1.2 Our Contributions
Our main contribution in this section is a worst-case work-optimal algorithm for
the universal coating problem on self-organizing particle systems. Our Universal
Coating Algorithm seamlessly adapts to any valid object O, uniformly coating the ob-
ject by forming multiple coating layers (where each coating layer consists of equidis-
tant particles to the object) if necessary. As stated in Section 2, our particles are
anonymous, do not have any global information (including on the number of particles
n), have constant-size memory, and utilize only local interactions.
Our algorithm builds upon many primitives, some of which may be of interest
on their own: The spanning forest primitive organizes the particles into a spanning
forest which is used to guide the movement of particles while preserving connectivity
in the system; the complaint-based coating primitive allows the first layer to form,
64

only expanding the coating of the first layer as long as there is still room and there
are particles still not touching the object; the general layering primitive allows the
layer ` to form only after layer ` − 1 has been completed, for ` ≥ 2; and a node-
based leader election primitive that works even as particles move and that is used to
jumpstart the general layering process. One of the main contributions of our work is
to show how these asynchronous primitives can be integrated in a seamless way, with
no underlying synchronization mechanisms.
Section 6.2 describes our Universal Coating algorithm. A formal correctness and
a worst-case work analyses of the algorithm follow in Section 6.3. We present our
concluding remarks in Section 6.5.
6.2 Universal Coating Algorithm
In this section we present our Universal Coating algorithm: In Section 6.2.1, we
introduce some preliminary notions; Section 6.2.2 introduces the algorithmic prim-
itives used for the coating algorithm; and lastly Section 6.2.3 focuses on the leader
election process needed in certain instances of the problem.
6.2.1 Preliminaries
We define the set of states that a particle can be in as idle, follower, root, and
retired. In addition to its state, a particle maintains a constant number of other flags,
which in our context are constant size pieces of information visible to neighboring
particles. A flag x owned by some particle p is denoted by p.x. While particles are
anonymous, when a particle p sets a flag of type x in its shared memory, we will denote
it by p.x (e.g., p.parent, p.dir, etc.), so that ownership of the respective flag becomes
clear. In our proposed algorithm, we assume that every time a particle contracts, it
contracts out of its tail.
65

Therefore, a node occupied by the head of a particle p still is occupied by p after
a contraction.
We define a layer as the set of nodes v in Geqt that are equidistant to the object
O. More specifically a node v is in layer ` if d(v, V (O)) = `; in particular the surface
coating layer defined earlier corresponds to layer 1. A particle keeps track of its current
layer number in p.layer. In order to respect the constant-size memory constraint of
particles, we take all layer numbers modulo 4. Any root or retired particle p stores a
flag p.layer indicating the layer number of the node occupied by the head of p. We
say that layer i, i ≥ 1, is complete if each node in that layer is occupied with a retired
particle (except for the last layer which can be partially filled with retired particles).
However, for ease of presentation, we will omit the modulo 4 computations in the
text, except for the pseudocode description of the algorithms.
Each root particle p has a flag storing a bond label p.down pointing to an occupied
node adjacent to its head in layer p.layer−1 or in the object if p.layer = 1. Moreover,
p has two additional flags, p.CW and p.CCW , which are also bond labels. Intuitively,
if p continuously moves by expanding in direction p.CW (resp., p.CCW ) and then
contracting, it moves along a clockwise (resp. counter-clockwise) path around the
connected structure consisting of the object and retired particles. Formally, p.CW is
the label of the first port to a node v in counter-clockwise (CCW) order from p.down
such that either v is occupied by a particle q with q.layer = p.layer, or v is unoccupied
(in the latter, v may be a node on layer p.layer or p.layer − 1). We define p.CCW
analogously, following a clockwise (CW) order from p.down. Figure 6.2 illustrates
the different layers around an object, and also CW and CCW traversals of those.
66

layer 1
layer 2
layer 3
Figure 6.2: We illustrate the first three coating layers with respect to the given object
(represented by the nodes in Geqt shaded in black); we also illustrate the direction in
which these layers will be filled by our algorithm – CW for odd layers, and CCW for
even layers – as determined in Section 6.2.2.
6.2.2 Coating Primitives
Our algorithm can be decomposed into a set of primitives, which are all concur-
rently executed by the particles, as we briefly explained in Section 7.1.1. Namely the
algorithm relies on the following key primitives: the spanning forest primitive, the
complaint-based coating primitive used to establish the first layer of coating, the gen-
eral layering primitive, and a node-based (rather than particle-based) leader election
primitive that works even as particles move, and that is used to jumpstart the general
layering primitive. One of the main contributions of our work is to show how these
primitives can be put to work together in a seamless way and with no underlying
synchronization mechanisms.2
The spanning forest primitive (Algorithm 7) organizes the particles in a span-
ning forest, in which the roots of the trees will be in state root and will determine
2A video illustrating a fully asynchronous execution of our universal coating algorithm can be
found in [1].
67

the direction of movement which is specified by a port label p.dir; the remaining
non-retired particles follow the root particles using handovers. The main benefit of
organizing the particles in a spanning forest connected to the surface is that it pro-
vides a relatively easy mechanism for particles to move, following the tree paths,
while maintaining connectivity in the system (see [36, 32] for more details). All par-
ticles are initially idle. A particle p becomes a follower when it sets a flag p.parent
corresponding to the port leading to its parent in the spanning forest (any adjacent
particle q to p can then easily check if q is a child of p). As the root particles find
final positions according to the partial coating of the object, they stop moving and
become retired. Namely, a root particle p becomes retired when it encounters another
retired particle across the direction p.dir.
68

Algorithm 7 Spanning Forest Primitive
A particle p acts depending on its state as described below:
idle: If p is connected to the object O, it becomes a root particle, makes
the current node it occupies a leader candidate position, and starts
running the leader election algorithm described in Section 6.2.3. If p
is connected to a retired particle, p also becomes a root particle. If an
adjacent particle p′ is a root or a follower, p sets the flag p.parent to
the label of the port to p′, puts a complaint flag in its local memory,
and becomes a follower. If none of the above applies, p remains idle.
follower: If p is contracted and connected to a retired particle or to O, then
p becomes a root particle. If p is contracted and has an expanded
parent, then p initiates Handover(p); Otherwise, if p is expanded,
it considers the following two cases: (i) if p has a contracted child
particle q, then p initiates Handover(p); (ii) if p has no children and
no idle neighbor, then p contracts. Finally, if p is contracted, it runs the
function ForwardComplaint(p, p.parent) described in Algorithm 9.
root: If particle p is on the surface coating layer, p participates in the leader
election process described in Section 6.2.3. If p is contracted, it first exe-
cutes MarkerRetiredConditions(p) (Algorithm 12), and becomes
retired, and possibly also a marker, accordingly; if p does not become re-
tired, if it has an expanded root in p.dir, then p initiates Handover(p).
Otherwise p calls LayerExtension (p) (Algorithm 10). If p is ex-
panded, it considers the following two cases: (i) if p has a contracted
child, then p initiates Handover(p); (ii) if p has no children and no
idle neighbor, then p contracts. Finally, if p is contracted, it runs
ForwardComplaint(p, p.dir) (Algorithm 9).
retired: p clears a potential complaint flag from its memory and performs no
further action. 69

Recall that B denotes the number of nodes on the surface coating layer (layer 1).
We need to ensure that once minn,B particles are on layer 1, they stop moving and
the coating is complete, independent of how B compares to n (i.e., whether n ≤ B
or not). In order to be able to seamlessly adapt to all possible surface configurations,
we use our novel complaint-based coating primitive for the first layer, which
basically translates into having the root particles (touching the object) open up one
more position on layer 1 only if there exists a follower particle that remains in the
system. This is accomplished by having each particle that becomes a follower generate
a complaint flag, which will be forwarded by particles in a pipeline fashion from
children to parents through the spanning forest and then from a root q to another
root at q.dir, until it arrives at a root particle p with an unoccupied neighboring node
at p.dir (we call such a particle p a super-root). Upon receiving a complaint flag, a
super-root p consumes the flag and expands into the unoccupied node at p.dir. The
expansion will eventually be followed by a contraction of p, which will induce a series
of expansions and contractions of the particles on the path from p to a follower particle
z, eventually freeing a position on the surface coating layer to be taken by z. In order
to ensure that the consumption of a complaint flag will indeed result in one more
follower touching the object, one must give higher priority to a follower child particle
in a handover operation, as we do in Algorithm 8. The complaint-based coating phase
of the algorithm will terminate either once all complaint flags are consumed or when
layer 1 is filled with contracted particles. In either case, the particles on layer 1 will
move no further. Figure 6.3 illustrates the complaint-based coating primitive.
70

(a) (b) (c) (d)
Figure 6.3: Complaint-based coating primitive: Particles are shown as grey circles. In
(a), a follower particle generates a complaint flag (depicted as a black dot within the
particle) that is then forwarded to a super-root (b) causing the super-root to expand
into an unoccupied node (c). After a series of handovers, the follower particle that
generated the complaint flag can move to a position on the surface (d).
Algorithm 8 Handover (p)
1: if p is expanded then
2: if p.layer = 1 and p has a follower child q such that q.parent points to the
tail of p then
3: if q is contracted then
4: p initiates a handover with particle q
5: else
6: if p has any contracted (follower or root) child q such that q.parent points
to the tail of p then
7: p initiates a handover with particle q
8: else
9: if p has an expanded parent q or the position in p.dir is occupied by an
expanded root q then
10: p initiates a handover with particle q
71

Algorithm 9 ForwardComplaint(p, i)
1: if p holds at least a complaint flag and the particle adjacent to p in direction i
holds less than two complaint flags then
2: p forwards the complaint flag to the particle given by i
Once layer 1 is complete and if there are still follower particles in the system,
the general layering primitive steps in, which will build further coating layers.
We accomplish this by electing a leader marker particle on layer 1 (via the leader
election primitive proposed in Section 6.2.3). This leader marker particle will be
used to determine a “beginning” (and an “end”) for layer 1 and allow the particles on
that layer to start retiring according to the retired condition given in Algorithm 12
(the leader marker particle will be the first retired particle in the system). Once a
layer ` becomes completely filled with retired (contracted) particles, a new marker
particle will emerge on layer `+1, and start the process of building this layer (i.e., start
the process of retiring particles on that layer) according to Algorithm 12. A marker
particle on layer `+1 only emerges if a root particle p connects to the marker particle
q on layer ` via its marker port and if q verified locally that layer ` is completely filled
(by checking whether q.CW and q.CCW are both retired).
With the help of the marker particles — which can only be established after
layer 1 was completely filled (and hence, we must have B ≤ n) — we can replace
the complaint-based coating algorithm of layer 1 with a simpler coating algorithm for
the higher layers, where each root particle p just moves in CW or CCW direction
(depending on its layer number) until p encounters a retired particle on the respective
layer and retires itself. More precisely, each contracted root particle p on layer ` tries
to extend this layer by expanding into an unoccupied position on layer `, or by
moving into an unoccupied position in layer `− 1 (when p.layer will change to `− 1
72

(a) (b) (c) (d)
Figure 6.4: General layering primitive: Retired particles are shown as black circles,
other than (retired) marker particles which are shown in dark grey (the dark grey
arrows represent the marker edges); a root particle is depicted in light grey. Black
arrows show the current direction of movement (given by the dir flag) for each particle
(which becomes irrelevant once a particle retires). (a) The root particle p is located
on layer ` = 3; (b) particle p moves in CW direction over retired particles on layer
`− 1; (c) after a series of expansions and contractions following p.dir, p arrives at an
unoccupied neighboring node on layer `−1; (d) since p.dir leads to a retired particle,
p retires too.
accordingly), following the direction of movement given by p.dir. Figure 6.4 illustrates
this process. The direction p.dir is set to p.CW (resp., p.CCW ) when p.layer is odd
(resp., even). Alternating between CCW and CW movements for the particles in
consecutive layers ensures that a layer ` is completely filled with retired particles
before particles start retiring in layer `+ 1, which is crucial for the correctness of our
layering algorithm.
73

Algorithm 10 LayerExtension (p)
Calculating p.layer, p.down and p.dir
1: The layer number of any node occupied by the object is equal to 0.
2: Let q be any neighbor of p with smallest layer number (modulo 4).
3: p.down ← p’s label for port leading to q
4: p.layer = (q.layer + 1) mod 4
5: clockwise (p, p.down) . Computes CW & CCW directions
6: if p.layer is odd then
7: p.dir ← p.CW
8: else
9: p.dir ← p.CCW
Extending layer p.layer
10: if the position at p.dir is unoccupied, and either p is not on the first layer, or p
holds a complaint flag then
11: p expands in direction p.dir
12: p consumes its complaint flag, if it holds one
74

Algorithm 11 Clockwise (p, i)
1: j ← i, k ← i
2: while edge j is connected to the object or to a retired particle with layer number
p.layer − 1 do
3: j ← (j − 1) mod 6
4: p.CW ← j
5: while edge k is connected to the object or to a retired particle with layer number
p.layer − 1 do
6: k ← (k + 1) mod 6
7: p.CCW ← k
75

Algorithm 12 MarkerRetiredConditions(p)
First marker condition:
1: if p is leader particle then
2: p becomes a retired particle
3: p sets the flag p.marker to be the label of a port leading to a node guaranteed
not to be on layer p.layer — e.g., by taking the average direction of p’s two
neighbors in layer 1 (by now complete)
Extending Layer Markers:
4: if p is connected to a marker q and the port q.marker points towards p then
5: if both q.CW and q.CCW are retired then
6: p becomes a retired particle
7: p sets the flag p.marker to the label of the port opposite of the port
connecting p to q
Retired Condition:
8: if edge p.dir is occupied by a retired particle then
9: p becomes retired
76

6.2.3 Leader Election Primitive
In this section, we describe the process used for electing a leader among the
particles that touch the object. Note that only particles in layer 1 will ever participate
in the leader election process. A leader will only emerge if B ≤ n; otherwise the
process will stop at some point without a leader being elected. As discussed earlier,
a leader is elected on layer 1 to provide a “checkpoint” (a marker particle) that the
particles can use in order to determine whether the layer has been completely filled
(and a leader is only elected after this happens).
The leader election algorithm we use here is similar to the algorithm presented in
Section 3 (and also in [26]) with the difference that leader candidates are associated
with positions instead of particles (which is important because in our case particles
may still move during the leader election primitive) as we presented in [34]. Hence,
for the purpose of universal coating, we will abstract the leader election algorithm to
conceptually run on the nodes in layer 1, and not on the particular particles that may
occupy these nodes at different points in time. The particles on layer 1 will simply
provide the means for running the leader election process on the respective positions,
storing and transferring all the flags (which can be used to implement the tokens
described in [36, 26]) that are needed for the leader competition and verification.
An expanded particle p on layer 1, whose tail occupies node v in layer 1, that is
about to perform a handover with contracted particle q will pass all the information
associated with v to q using the particles’ local shared memories. If a particle p
occupying position v would like to forward some leader election information to a
node w adjacent to v that is currently unoccupied, it will wait until either p itself
expands into w, or another particle occupies node w. It is important to note that
according to the complaint-based coating algorithm that we run on layer 1, if a node
77

v in layer 1 is occupied at some time t, then v will never be left unoccupied after
time t. Here we outline the differences between the leader election process used in
this section and that of Section 3).
• Only the nodes on layer 1 that initially hold particles start as leader node candi-
dates. Other nodes in layer 1 will take part in the leader node election process by
forwarding any tokens between two consecutive leader node candidates, as deter-
mined for the leader election process for a set of static particles forming a cycle
in [36]. Note that layer 1 is a cycle on Geqt.
• The leader election process will determine which leader node candidate in layer 1
will emerge as the unique leader node. The leader particle is then chosen as de-
scribed below.
• If particle p is expanded, it will hold the flags and any other information necessary
for the leader election process corresponding to each node p occupies (head and tail
nodes) independently. In other words, an expanded particle emulates the leader
election process for two nodes on the surface layer.
• A particle p occupying node v forwards a flag τ to the node w in CW (or CCW)
direction along the surface layer only if node w is occupied by a particle q (note
that q may be equal to p, if p is expanded) and q has enough space in its (constant-
size) memory associated with node w; otherwise p continues to hold the flag τ in
its shared memory associated with node v.
• If p is expanded along an edge (v, w) and wants to contract into node w, there
must exist a particle q expanding into v (due to the complaint-based mechanism),
and hence p will transfer all of its flags currently associated with node v to q.
After the solitude verification phase in the leader election algorithm of [26, 36] is
complete, there will be just one leader node v left in the system. Once v is elected a
78

leader node and there are no more followers, or all positions in layer 1 are filled by
contracted particles, then whatever particle currently covers that position becomes
the leader. In order to check if layer 1 is completely filled with contracted particles, a
contracted particle p occupying this position will follow the following process: when
a contracted particle p occupies node v it will generate a single CHK flag which it
will forward to its CCW neighbor q only if q is contracted. Any particle q receiving
a CHK flag will also only forward the flag to its CCW neighbor z if and only if z
is contracted. If the CHK flag at a particle q ever encounters an expanded CCW
neighbor, the flag is held back until the neighbor contracts. Additionally, the particle
at position v sends out a CLR flag to its CW neighbor as soon as it expands. This
flag is always forwarded in CW direction. If a CLR and a CHK flag meet at some
particle, the flags cancel each other out. If at some point in time, a particle p at node
v receives a CHK flag from its CW neighbor in layer 1, it implies that layer 1 must
be completely filled with contracted particles (and the complaint-based algorithm for
layer 1 has converged), and at that time this contracted particle p elects itself the
leader particle, setting the flag p.leader. Note that the leader election process itself
does not incur any additional particle expansions or contractions on layer 1, only
the complaint-based algorithm does. If the primitive does not terminate (which only
happens if n < B1 and layer 1 is never completely covered), then the complaint flags
ensure that the super-roots eventually stop, which eventually results in a stable legal
coating.
79

6.3 Correctness and Work Analysis
In this section we show that our algorithm eventually solves the coating problem,
and we bound its worst-case work.
We say a particle p′ is the parent of particle p if p′ occupies the node in direction
p.parent. Let an active particle be a particle in either follower or root state. We call
an active particle a boundary particle if it has the object or at least one retired particle
in its neighborhood, otherwise it is a non-boundary particle. A boundary particle is
either a root or a follower, whereas non-boundary particles are always followers. Note
that throughout the analysis we ignore the modulo computation of layers done by the
particles, i.e., layer 1 is the unique layer of nodes with distance 1 to the object.
Given a configuration C, we define a directed graph A(C) over all nodes in Geqt
occupied by active particles in C. For every expanded active particle in C, A(C)
contains a directed edge from the tail to the head node of p. For every non-boundary
particle p, A(C) has a directed edge from the head of p to p.parent, if p.parent is
occupied by an active particle, and for every boundary particle p, p has a directed
edge from its head to the node in the direction of p.dir as it would be calculated by
Algorithm 10, if p.dir is occupied by an active particle. The ancestors of a particle
p are all nodes reachable by a path from the head of p in A(C). For each particle
p we denote the ancestor that has no outgoing edge with p.superRoot, if it exists.
Certainly, since every node has at most one outgoing edge in A(C), the nodes of A(C)
can only form a collection of disjoint trees or a ring of trees. We define a ring of trees
to be a connected graph consisting of a single directed cycle with trees rooted at it.
First, we prove several safety conditions, and then we prove various liveness con-
ditions that together will allow us to prove that our algorithm solves the coating
problem.
80

6.3.1 Safety
Suppose that we start with a valid instance (P,O), i.e., all particles in P are
initially contracted and idle and V (P ) ∪ V (O) forms a single connected component
in Geqt, among other properties. Then the following properties hold, leading to the
fact that V (P ) ∪ V (O) stays connected at any time.
Lemma 10. At any time, the set of retired particles forms completely filled layers
except for possibly the current topmost layer `, which is consecutively filled with retired
particles in CCW direction (resp. CW direction) if ` is odd (resp. even).
Proof. From our algorithm it follows that the first particle that retires is the leader
particle, setting its marker flag in a direction not adjacent to a position in layer 1.
The particles in layer 1 then retire starting from the leader in CCW direction around
the object. Once all particles in layer 1 are retired, the first particle to occupy the
adjacent position to the leader via its marker flag direction will retire and become a
marker particle on layer 2, extending its marker flag in the same direction as the flag
set by the marker (leader) on layer 1. Starting from the marker particle in layer 2,
other contracted boundary particles can retire in CW direction along layer 2. Once
all particles in layer 2 are retired, the next layer will start forming. This process
continues inductively, proving the lemma.
The next lemma characterizes the structure of A(C).
Lemma 11. At any time, A(C) is a forest or a ring of trees. Any node that is a
super-root (i.e., the root of a tree in A(C)) or part of the cycle in the ring of trees is
connected to the object or to a retired particle.
Proof. An active particle can either be a follower or a root. First, we show the
following claim.
81

Claim 1. At any time, A(C) restricted to non-boundary particles forms a forest.
Proof. Let A′(C) be the induced subgraph of A(C) by the non-boundary particles
only. Certainly, at the very beginning, when all particles are still idle, the claim is
true. So suppose that the claim holds up to time t. We will show that it then also
holds at time t + 1. Suppose that at time t + 1 an idle particle p becomes active. If
it is a non-boundary particle (i.e., a follower), it sets p.parent to a node occupied by
a particle q that is already active, so it extends the tree of q by a new leaf, thereby
maintaining a tree. Edges can only change if followers move. However, followers only
move by a handover or a contraction, thus a handover can only cause a follower and
its incoming edges to disappear from A′(C) (if that follower becomes a boundary
particle), and an isolated contraction, can only cause a leaf and its outgoing edge to
disappear from A′(C), so a tree is maintained in A′(C) in each of these cases.
Next we consider A(C) restricted to boundary particles.
Claim 2. At any time, A(C) restricted to boundary particles forms a forest or a ring.
Proof. The boundary particles always occupy the nodes adjacent to retired particles
or the object. Therefore, due to Lemma 10, the boundary particles either all lie in a
single layer or in two consecutive layers. Since the layer numbers uniquely specify the
movement direction of the particles, connected boundary particles within a layer are
all connected in the same orientation. Therefore, if these particles all lie in a single
layer, they can only form a directed list or directed cycle in A(C), proving the claim.
If they lie in two consecutive layers, say, ` and `− 1, then `− 1 must contain at least
one retired particle, so the nodes occupied by the boundary particles in layer ` − 1
can only form a directed list. If there are at least two boundary particles in layer
`−1, this must also be true for the nodes occupied by the boundary particles in layer
` because according to Lemma 10 there must be at least two consecutive nodes in
82

layer `− 1 not occupied by retired particles. Moreover, it follows from the algorithm
that p.dir of a boundary particle can only point to the same or the next lower layer of
p, implying that in this case A(C) restricted to the nodes occupied by all boundary
particles forms a forest.
Since a boundary particle p never connects to a non-boundary particle the way
p.dir is defined, and a follower without an outgoing edge in A(C) restricted to the non-
boundary particles must have an outgoing edge to a boundary particle (otherwise it is
a boundary particle itself), A(C) is a forest or a ring of trees. The second statement
of the lemma follows from the fact that every boundary particle must be connected
to the object or a retired particle.
Finally, we investigate the structure formed by the idle particles.
Lemma 12. At any time, every connected component of idle particles is connected
to at least one non-idle particle or the object.
Proof. Initially, the lemma holds by the definition of a valid instance. Suppose that
the lemma holds at time t and consider a connected component of idle particles. If
one of the idle particles in the component is activated, it may either stay idle or
change to an active particle, but in both cases the lemma holds at time t + 1. If a
retired particle that is connected to the component is activated, it does not move.
If a follower or root particle that is connected to the component is activated, that
particle cannot contract outside of a handover with another follower or root particle,
which implies that no node occupied by it is given up by the active particles. So in
any of these cases, the connected component of idle particle remains connected to a
non-idle particle. Therefore, the lemma holds at time t+ 1.
83

The following corollary is consequence of the previous three lemmas.
Corollary 1. At any time, V (P ) ∪ V (O) forms a single connected component.
Lemma 13. At any time before the first particle retires, in every connected compo-
nent G of A(C), the number of expanded boundary particles in G plus the number of
complaint flags in G is equal to the number of non-boundary particles in G.
Proof. Initially, the lemma holds trivially. Suppose the lemma holds at time t and
consider the next activation of a particle. We only discuss relevant cases. If an idle
particle becomes a non-boundary particle (i.e., it is not connected to the object but
joins a connected component), it also generates a complaint flag. So both the number
of non-boundary particles and the number of complaint flags increases by one for
the component the particle joins. If a non-boundary particle expands as part of a
handover with a boundary particle, both the number of expanded boundary particles
and the number of non-boundary particles decrease by one for the component. If
a boundary particle expands as part of a handover, that handover must be with
another boundary particle, so the number of expanded boundary particles remains
unchanged for that component. Since by our assumption there is no retired particle,
all boundary particles are in layer 1. Hence, for a boundary particle to expand outside
of a handover, it has to consume a complaint flag. This increases the number of
expanded boundary particles by one and decreases the number of complaint flags by
one. Finally, an expansion of a boundary particle outside of a handover can connect
two components of A(C). Since the equation given in the lemma holds for each of
these components individually, it also holds for the newly built component.
84

6.3.2 Liveness
We say that the particle system makes progress if (i) an idle particle becomes
active, or (ii) a movement (i.e., an expansion, handover, or contraction) is executed,
or (iii) an active particle retires. In the following, we always assume that we have a
fair activation sequence for the particles.
Before we show under which circumstances our particle system eventually makes
progress, we first establish some lemmas on how particles behave during the execution
of our algorithm.
Lemma 14. Eventually, every idle particle becomes active.
Proof. As long as an idle particle exists, there is always an idle particle p that is
connected to a non-idle particle or the object according to Lemma 12. The next time
p is activated p becomes active according to Algorithm 7. Therefore, eventually all
particles become active.
The following statement shows that even though super-roots can be followers, they
will become a boundary particle the next time they are activated.
Lemma 15. In every tree of A(C), every boundary particle in the follower state
enters a root state the next time it is activated. In particular, every super-root in
A(C) will enter the root state the next time it is activated.
Proof. Let p be a follower boundary particle. By definition p must have a retired
particle or the object in its neighborhood. Therefore, p immediately becomes a root
particle once it is activated according to Algorithm 7.
Furthermore, the following lemma provides a relation between the movement of
super-roots and the availability of complaint flags.
85

Lemma 16. For every tree of A(C) with a contracted super-root p and at least one
complaint flag, p will eventually retire or expand to p.dir, thereby consuming a com-
plaint flag, and after the expansion p may cease to be a super-root.
Proof. If p is not a root, it becomes one the next time it is activated according to
Lemma 15. Therefore, assume p is a root. If there is a retired particle in p.dir,
p retires and ceases to be a super-root. If the node in p.dir is unoccupied, p can
potentially expand. According to Algorithm 9, complaint flags are forwarded along
the tree of p towards p. Once the flag reaches p, it will expand, thereby consuming
the flag. If p expands, it might have an active particle in its movement direction and
thus ceases to be a super-root.
Next, we prove the statement that expanded particles will not starve, i.e., they
will eventually contract.
Lemma 17. Eventually, every expanded particle contracts.
Proof. Consider an expanded particle p in a configuration C. By Lemma 14 we can
assume w.l.o.g. that all particles in C are active or retired. If there is no particle q
with either q.parent = p or p occupying the node in q.dir, then p can contract once
it is activated. If such a q exists and it is contracted, p contracts in a handover (see
Algorithm 8). If q exists and is expanded, we consider the tree of A(C) that p is part
of. Consider a subpath in this tree that starts in p, i.e., (v1, v2, . . . , vk) such that v1, v2
are occupied by p and vk is a node that does not have an incoming edge in A(C).
Let vi be the first node of this path that is occupied by a contracted particle. If
all particles are expanded, then clearly the last particle occupying vk−1, vk eventually
contracts and we can set vi to vk−1. Since vi is contracted it eventually performs a
handover with the particle occupying vi−2, vi−1. Now we can move backwards along
(v1, v2, . . . , vi−1) and it is guaranteed that a contracted particle eventually performs
86

a handover with the expanded particle occupying the two nodes before it on the
path. So eventually q is contracted, eventually performs a handover with p and the
statement holds.
In the following two lemmas we will specifically consider the case that B ≤ n, i.e.,
the particles can coat at least one layer around the object.
Lemma 18. If B ≤ n, layer 1 is completely filled with contracted particles eventually.
Proof. Consider a configuration C such that layer 1 is not completely filled by con-
tracted particles. Note that in this case the leader election cannot have succeeded
yet, which means that a leader cannot be elected, and therefore no particle can be
retired in configuration C. So by Lemma 14 we can assume w.l.o.g. that all particles
in configuration C are active.
Since layer 1 is not completely filled by contracted particles, there is either at
least one unoccupied node v on layer 1 or all nodes are occupied, but there is at least
one expanded particle on layer 1. We show that in both cases a follower will move to
layer 1, thereby filling up the layer until all particles are contracted. In the first case,
let p be the super-root of a tree in A(C) that still has non-boundary particles, let
(p0 = p, p1, . . . , pk) be the boundary particles of the tree such that pi−1 occupies the
node in pi.dir and let q be the non-boundary particle in the tree that is adjacent to
some pj ∈ (p0, . . . , pk) such that j is minimal. If a particle pi in (p0, . . . , pj = q.parent)
is expanded, it eventually contracts (Lemma 17) by a handover with pi+1, and by
consecutive handovers all particles in (pi+1, . . . , pj) eventually expand and contract
until the particle pj = q.parent expands. According to Algorithm 8, pj performs a
handover with q. Therefore, the number of particles on layer 1 has increased. If all
particles in (p0, . . . , q.parent) are contracted, then by Lemma 13 a complaint flag still
exists in the tree. Eventually, p expands by Lemma 16. Consequently, we are back in
87

the former case that a particle in (p0, . . . , q.parent) is expanded. In the second case,
let p′ be an expanded boundary particle and let q′ be the non-boundary particle with
the shortest path in A(C) to p′. By a similar argument as for the first case, particles
on layer 1 perform handovers (starting with p′) until eventually the node in q′.parent
is occupied by a tail. Again, q′ eventually performs a handover and the number of
particles on layer 1 has increased.
As a direct consequence, we can show the following.
Lemma 19. If B ≤ n, a leader is elected in layer 1 eventually.
Proof. According to Lemma 18 layer 1 is eventually filled with contracted particles.
Leader Election successfully elects a leader node according to [36]. The contracted
particle p occupying the leader node forwards the CHK flag and eventually receives
it back, since all particles are contracted. Therefore, p becomes a leader.
Now we are ready to prove the two major statements of this subsection that define
two conditions for system progress.
Lemma 20. If all particles are non-retired and there is either a complaint flag or an
expanded particle, the system eventually makes progress.
Proof. If there is an idle particle, progress is ensured by Lemma 14. If an active
particle is expanded Lemma 17 guarantees progress. Finally, in the last case all
particles are active, none of them is expanded and there is a complaint flag. If
layer 1 is completely filled, a leader is elected according to Lemma 19 and as a direct
consequence the active particles on layer 1 eventually retire, guaranteeing progress. If
layer 1 is not completely filled, there exists at least one tree of A(C) with a contracted
super-root p that has an unoccupied node in p.dir and at least one complaint flag.
Therefore, progress is ensured by Lemma 16.
88

Lemma 21. If there is at least one retired particle and one active particle, the system
eventually makes progress.
Proof. Again, if there is an idle particle, progress is ensured by Lemma 14. Moreover,
note that since there is at least one retired particle, we can conclude that leader
election has been successful (since the first particle that retires is a leader particle)
and therefore layer 1 has to be completely filled with contracted particles. If there is
still a non-retired particle on layer 1, it eventually retires according to the Algorithm,
guaranteeing progress.
So suppose that all particles in layer 1 are retired. We distinguish between the
following cases: (i) there exists at least one super-root, (ii) no super-root exists,
but there is an expanded particle, and (iii) no super-root exists and all particles are
contracted. In case (i), Lemma 15 guarantees that a super-root will eventually enter
root state, and therefore it will eventually either expand (if p.dir is unoccupied) or
retire (since p.dir is occupied by a retired particle). In case (ii), the particle contracts
according to Lemma 17. In case (iii) A(C) forms a ring of trees, which can only
happen if all boundary particles completely occupy a single layer, so there is an active
particle that occupies the node adjacent to the marker edge. Since it is contracted
by assumption, it retires upon activation. Therefore, in all three cases the system
eventually makes progress.
6.3.3 Termination
Finally, we show that the algorithm eventually terminates in a legal configuration,
i.e., a configuration in which the coating problem is solved. For the termination we
need the following two lemmas.
Lemma 22. The number of times an idle particle is transformed into an active one
89

and an active particle is transformed into a retired one is bounded by O(n).
Proof. From our algorithm it immediately follows that every idle particle can only
be transformed once into an active particle, and every active particle can only be
transformed once into a retired particle. Moreover, a non-idle particle can never
become idle again, and a retired particle can never become non-retired again, which
proves the lemma.
Lemma 23. The overall number of expansions, handovers, and contractions is bounded
by O(n2).
Proof. We will need the following fact, which immediately follows from our algorithm.
Fact 1. Only a super-root of A(C) can expand to a non-occupied node, and every
such expansion triggers a sequence of handovers, followed by a contraction, in which
every particle participates at most twice.
Consider any particle p. Note that only an active particle performs a movement.
Let C be the first configuration in which p becomes active. If it is a non-boundary
particle (i.e., a follower), then consider the directed path in A(C) from the head of p
to the super-root r of its tree or the first particle r belonging to the ring in the ring of
trees. Such a path must exist due to Lemma 11. Let P = (v0, v1, . . . , vm) be a node
sequence covered by this path where v0 is the head of p in C and vm is the first node
along that path with the object or a retired particle in its neighborhood. Note that
by Lemma 11 such a node sequence is well-defined since vm must at latest be a node
occupied by r. According to Algorithm 7, p attempts to follow P by sequentially
expanding into the nodes v0, v1, . . . , vm. At latest, p will become a boundary particle
once it reaches vm. Up to this point, p has traveled along a path of length at most
2n, and therefore, the number of movements p executes as a follower is O(n).
90

Now suppose p is a boundary particle. Let C be the configuration in which p
becomes a boundary particle and let ` = p.layer. Suppose that ` = 1. From our
algorithm we know that at most n complaint flags are generated by the particles,
and therefore by Lemma 16, there are at most n expansions in level 1 (the rest are
handovers or contractions). Hence, it follows from Fact 1 that p can only move O(n)
times as a boundary particle.
Next consider the case that ` > 1. Here we will need the following well-known
fact.
Fact 2. Let Bi be the length of layer i. For every i and every valid instance (P,O)
allowing O to be coated by i layers it holds that Bi = B0 + 6i.
If ` = 2, there must be a retired particle in layer 1, and since the leader is the first
retired particle, Lemmas 18 and 19 imply that level ` − 1 is completely filled with
contracted particles. So p can only move along nodes of layer `. Since B`−1 ≤ n, it
follows from Fact 2 that B` ≤ n + 6. As long as not all particles in level ` − 1 are
retired, p cannot move beyond the marker node in level `. So p either becomes retired
before reaching the marker node, or if it reaches the marker node, it has to wait there
till all particles in level `− 1 are retired, which causes the retirement of p. Therefore,
p moves along at most n+ 6 nodes. If ` > 2, we know from Lemma 10 that level `−2
is completely filled with contracted particles. Since B`−2 ≤ n and B` = B`−2 + 12, it
follows that B` ≤ n + 12. Hence, p will move along at most n + 12 nodes in level `
before becoming retired or moving to level `− 1, and p will move along at most n+ 6
further nodes in level `− 1 before retiring.
Thus, in any case, p performs at most O(n) movements as a boundary particle.
Therefore, the number of movements any particle in the system performs is O(n),
which concludes the lemma.
91

Lemmas 22 and 23 imply that the system can only make progress O(n2) many
times. Hence, eventually our system reaches a configuration in which it no longer
makes progress, so the system terminates. It remains to show that when the algorithm
terminates, it is in a legal configuration, i.e., the algorithm solves the coating problem.
Theorem 10. Our coating algorithm terminates in a legal configuration.
Proof. From the conditions of Lemmas 20 and 21 we know that the following facts
must both be true when the algorithm terminates:
1. At least one particle is retired or there is neither a complaint flag nor an ex-
panded particle in the system (Lemma 20).
2. Either all particles are retired or all particles are active (Lemma 21).
First suppose that all particle are retired. Then it follows from Lemma 10 that
the configuration is legal. Next, suppose that all particles are active and neither
a complaint flag nor an expanded particle is left in the system. Then Lemma 13
implies that there cannot be any non-boundary any more, so all active particles must
be boundary particles. If there is at least one boundary particle in layer ` > 1,
then there must be at least one retired particle, contradicting our assumption. So all
boundary particles must be in layer 1, and since there are no more complaint flags
and all boundary particles are contracted, also in this case our algorithm has reached
a legal configuration, which proves our theorem.
Recall that the work performed by an algorithm is defined as the number of move-
ments (expansions, handovers, and contractions) of the particles till it terminates.
Lemma 23 implies that the work performed by our algorithm is O(n2). Interestingly,
this is also the best bound one can achieve in the worst-case for the coating problem.
92

Lemma 24. The worst-case work required by any algorithm to solve the Universal
Object Coating problem is Ω(n2).
Proof. Consider the configuration of particles which is a straight line connected to the
object from an endpoint of the line. A particle with distance i ≥ 1 to the object needs
at least 2(i−1−⌈i−1B
⌉) movements to become contracted on its final layer. Therefore,
any algorithm requires at least 2∑n−1
i=1 (i− 1−⌈i−1B
⌉) ≥
∑n−1i=1 (i− 1− ( i
B)) = Ω(n2)
work assuming B ≥ 2.
Hence, we get:
Theorem 11. Our algorithm requires worst-case optimal work Θ(n2).
6.4 Applications
In this section, we present other coating scenarios and applications of our universal
coating algorithm. Our algorithm can be easily extended to also handle the case when
one would like to cover only a certain portion of the object surface. More concretely,
assume that one would like to cover the portion of the object surface delimited by
two endpoint nodes. Basically in that case, the algorithm can be modified slightly so
that the particles that eventually reach one of the endpoints of the surface segment
retire and become endpoint markers. The position of endpoint marker particles will
be propagated to higher layers, as necessary, such that the delimited portion of the
object is evenly coated.
Once the first layer is formed and a leader is elected (implying that B ≤ n), one
can trivially determine (i) whether the number of particles in the system is greater
than or equal to the size of the object boundary, or (ii) whether the object O is convex;
one could also potentially address other applications that involve aggregating some
(constant-size) collective data over the boundary of the object O. Once all particles
93

in layer 1 retire, a leader will emerge and that leader can initiate the respective
application. For the first application, all particles may initially assume that B > n.
Once a leader is elected, it informs all other particles that B ≤ n. For the convexity
testing, the leader particle can generate a token that traverses the boundary in CW
direction: If the token ever makes a left turn (i.e., it traverses two consecutive edges
on the boundary at an outer angle of less than 180), then the object is not convex;
otherwise the object is convex.
6.5 Conclusion
We presented a universal coating algorithm for programmable matter using worst-
case optimal work. In the next section we bound the parallel runtime of our algorithm
and investigate its runtime competitiveness, i.e., how does its runtime compare to
the best possible runtime for any given instance. Moreover, it would be interesting
to implement the algorithm and evaluate its performance either via simulations or
hopefully at some point even via experiments with real programmable matter.
94

Chapter 7
ON THE RUNTIME OF UNIVERSAL COATING
7.1 Introduction
We continue the study of coating problems in the context of self-organizing pro-
grammable matter consisting of simple computational elements, called particles, that
can establish and release bonds and can actively move in a self-organized way us-
ing the geometric version of the amoebot model presented in Section 2 (as well as
[26, 30]). In doing so, we proceed to investigate the runtime analysis of our Universal
Coating algorithm, introduced in Section 6 and [34]. We first show that coating
problems do not only have a (trivial) linear lower bound on the runtime, but that
there is also a linear lower bound on the competitive gap between the runtime of fully
local coating algorithms and coating algorithms that rely on global information. We
then investigate the worst-case time complexity of our Universal Coating algorithm
and show that it terminates within a linear number of rounds with high probability
(w.h.p.)1, which implies that our algorithm is optimal in terms of worst-case run-
time and also in a competitive sense. Moreover, our simulation results show that in
practice the competitive ratio of our algorithm is often better than linear.
7.1.1 Our Contributions
We now continue the analysis of the Universal Coating algorithm introduced in
Section 6. As our main contribution in this chapter, we investigate the runtime of
1By with high probability, we mean with probability at least 1− 1/nc, where n is the number of
particles in the system and c > 0 is a constant.
95

our algorithm and prove that our algorithm terminates within a linear number of
rounds with high probability. We also present a matching linear lower bound for
local-control coating algorithms that holds with high probability. We use this lower
bound to show a linear lower bound on the competitive gap between fully local coating
algorithms and coating algorithms that rely on global information, which implies that
our algorithm is also optimal in a competitive sense. We then present some simulation
results demonstrating that in practice the competitive ratio of our algorithm is often
much better than linear.
7.1.2 Overview
In Section 7.2, we present a brief overview of the algorithm. We then present
a comprehensive formal runtime analysis of our algorithm, by first presenting some
lower bounds on the competitive ratio of any local-control algorithm in Section 7.3,
and then proving that our algorithm has a runtime of O(n) rounds w.h.p. in Sec-
tion 7.4, which matches our lower bounds. This study appears in [31].
7.2 Brief Overview of the Universal Coating Algorithm
In this section we summarize the Universal Coating algorithm introduced in Sec-
tion 6.2 and [34]. This algorithm is constructed by combining a number of asyn-
chronous coating primitives, which are integrated seamlessly without any underlying
synchronization.
7.2.1 Overview of Coating Primitives
The spanning forest primitive organizes the particles in a spanning forest
F , which creates a straightforward mechanism for particles to move while preserving
connectivity (see Section 6.2.2 and [26, 32] for details). Initially, all particles are
96

idle. A particle p touching the object changes its state to root. For any other idle
particle p we use the rule that once p sees a root or a follower in its neighborhood,
it stores the direction to one of them in p.parent, changes its state to follower, and
generates a complaint flag. Follower particles use handovers to follow their parents
and update p.parent as they move so that it always points to the same parent (resp.
the follower that took over the role of p’s parent q because of a handover with q). In
this way, the trees formed by the parent relations stay connected, only use positions
they have covered before, and do not mix with other trees. Roots p use the flag p.dir
to determine their movement direction. As a root p moves, it updates p.dir so that
it always points to the next position of a clockwise movement around the object. For
any particle p, we call the particle occupying the position that p.parent resp. p.dir
points to the predecessor of p. If a root particle does not have a predecessor, we call
it a super-root.
The complaint-based coating primitive is used for the coating of the first
layer. This primitive controls the coating of the first layer, by expanding the coating
of the first layer while there is still room and there are still particles not yet touching
the object Each time a particle p holding at least one complaint flag is activated, it
forwards one to its predecessor as long as that predecessor does not hold more than
two complaint flags. Allowing each particle to hold up to two complaint flags has two
reasons: it ensures that a constant size memory is sufficient for storing the complaint
flags and that the flags quickly move forward to the super-roots. A contracted super-
root p only expands to p.dir if it holds at least one complaint flag, and when it
expands, it consumes one of these complaint flags. All other roots p move towards
p.dir whenever possible (i.e., no complaint flags are needed for that) by performing
a handover with a predecessor (which must be another root) or a successor (which is
a root or a follower of its tree), with preference given to a follower so that one more
97

particle reaches layer 1. As we will see, these rules ensure that whenever there are
particles in the system that are not yet at layer 1, eventually one of these particles will
move to layer 1, unless layer 1 is already completely filled with contracted particles.
The node-based leader election primitive runs during the complaint-based
coating primitive to elect a position along layer 1 as the leader position. This al-
gorithm is similar to the algorithm presented in [26] with the difference that leader
candidates are associated with positions instead of particles (which is important be-
cause in our case particles may still move during the leader election primitive) as
we presented in [34]. The primitive only terminates once all positions in layer 1 are
occupied. Once the leader position is determined, and there are no more followers
or all positions in layer 1 are filled by contracted particles, then whatever particle
currently covers that position becomes the leader. If the primitive does not terminate
(which only happens if n < B1 and layer 1 is never completely covered), then the
complaint flags ensure that the super-roots eventually stop, which eventually results
in a stable legal coating. Given that a particle becomes the leader, that leader be-
comes a marker particle that marks a neighboring position at the next higher layer
as a marked position and changes to the retired state. The marked position deter-
mines the point at which root particles should align in the next higher layer. Once a
contracted root p has a retired particle in the direction p.dir, it retires as well, which
causes the particles in layer 1 to change to the retired state in a counter-clockwise
order. Also, the general layering primitive becomes active, which builds subsequent
layers until there are no longer followers in the system.
The general layering primitive allows each layer i to form only after layer i−1
has been completed, for i ≥ 2. In this primitive, whenever a follower is connected
to a retired particle, it changes to the root state. Root particles continue to move
along positions of their layer in a clockwise (if the layer number is odd) or counter-
98

clockwise (if the layer number is even) direction till they reach the marked position in
that layer, or a retired particle in that layer, or a previously empty position of a lower
layer (which causes them to change direction). Complaint flags are no longer needed
to move to empty spots. Followers follow their parents as before. A contracted root
particle may retire due to the following reasons: (i) it is located at the marked position
and the marker particle in the lower layer tells it that all particles in that layer are
already retired (which it can determine locally), or (ii) it has a retired particle in
the direction of its layer. Once a particle at a marked position retires, it becomes a
marker particle and marks a neighboring position at the next higher layer as a marked
position.
7.3 Lower Bounds
Recall that a round is over once every particle in P has been activated at least
once. The runtime TA(P,O) of a coating algorithm A is defined as the worst-case
number of rounds (over all sequences of particle activations) required for A to solve
the coating problem (P,O). Certainly, there are instances (P,O) where every coating
algorithm has a runtime of Ω(n) (see Lemma 25), though there are also many other
instances where the coating problem can be solved much faster. Since a worst-case
runtime of Ω(n) is fairly large and therefore not very helpful to distinguish between
different coating algorithms, we intend to study the runtime of coating algorithms
relative to the best possible runtime.
Lemma 25. The worst-case runtime required by any local-control algorithm to solve
the universal coating problem is Ω(n).
Proof. Assume the particles p1, . . . , pn form a single line of n particles connected to
the surface via p1 (Figure 7.1). Suppose B1 > n. Since d(pn, O) = n, it will take Ω(n)
rounds in the worst-case (requiring Θ(n) movements) until pn touches the object’s
99

Figure 7.1: Worst-case configuration concerning number of rounds. There are n particles
(black dots) in a line connected to the surface via a single particle p1.
surface. This worst-case can happen, for example, if pn performs no more than one
movement (either an expansion or a contraction) per round.
Unfortunately, a large lower bound also holds for the competitiveness of any local-
control algorithm. A coating algorithm A is called c-competitive if for any valid
instance (P,O),
E[TA(P,O)] ≤ c ·OPT(P,O) +K
where OPT(P,O) is the minimum runtime needed to solve the coating problem (P,O)
and K is a value independent of (P,O).
Theorem 12. Any local-control algorithm that solves the universal coating problem
has a competitive ratio of Ω(n).
Proof. We construct an instance of the coating problem (P,O) which can be solved
by an optimal algorithm in O(1) rounds, but requires any local-control algorithm
Ω(n) times longer. Let O be a straight line of arbitrary (finite) length, and let P
be a set of particles which entirely occupy layer 1, with the exception of one missing
particle below O equidistant from its sides and one additional particle above O in
layer 2 equidistant from its sides (see Figure 7.2).
An optimal algorithm could move the particles to solve the coating problem for
the given example in O(1) rounds, as in Figure 7.3. Note that the optimal algorithm
always maintains the connectivity of the particle system, so its runtime is valid even
under the constraint that any connected component of particles must stay connected.
100

Figure 7.2: The object occupies a straight line in Geqt. The particles are all contracted and
occupy the positions around the object, with the exception that there is one unoccupied
node below the object and one extra particle above the object. Borders L and R are shown
as red lines.
However, for our local-control algorithms we allow particles to disconnect from the
rest of the system.
Now consider an arbitrary local-control algorithm A for the coating problem.
Given a round r, we define the imbalance φL(r) at border L as the net number of
particles that have crossed L from the top of O to the bottom until round r; similarly,
the imbalance φR(r) at border R is defined to be the net number of particles that
have crossed R from the bottom of O to the top until round r.
Certainly, there is an activation sequence in which information and particles can
only travel a distance of up to n/4 nodes towards L or R within the first n/4 rounds.
Hence, for any r ≤ n/4, the probability distributions of φL(r) and φR(r) are in-
dependent of each other. Additionally, particles up to a distance of n/4 from L
and R cannot distinguish between which border they are closer to, since the posi-
tion of the gap is equidistant from the borders. This symmetry also implies that
Pr[φL(r) = k] = Pr[φR(r) = k] for any integer k. Let us focus on round r = n/4. We
distinguish between the following cases.
Case 1: φL(n/4) = φR(n/4). Then there are more particles than positions in layer
1 above O, so the coating problem cannot be solved yet.
101

Figure 7.3: Each subfigure represents the configuration of the system at the beginning of
a round, and are ordered from left to right, top to bottom. After 5 rounds (i.e., at the
beginning of the sixth round) the object is coated. Note that the implied algorithm can be
adapted to any length of the object and always requires only 5 rounds to solve the coating
problem.
Case 2: φL(n/4) 6= φR(n/4). From our insights above we know that for any
two values k1 and k2, Pr[φL(n/4) = k1 and φR(n/4) = k2] = Pr[φL(n/4) = k2 and
φR(n/4) = k1]. Hence, the cumulative probability of all outcomes where φL(n/4) <
φR(n/4) is equal to the cumulative probability of all outcomes where φL(n/4) >
φR(n/4). If φL(n/4) < φR(n/4), then there are again more particles than positions
in layer 1 above O, so the coating problem cannot be solved yet.
Thus, the probability that A has not solved the coating problem after n/4 rounds
is at least 1/2, and therefore E[TA(P,O)] ≥ 1/2 · n/4 = n/8. Since, on the other
hand, OPT = O(1), we have established a linear competitive ratio.
Therefore, even the competitive ratio can be very high in the worst case. We will
revisit the notion of competitiveness in Section 7.5.
102

7.4 Worst-Case Number of Rounds
In this section, we show that our algorithm solves the coating problem within a
linear number of rounds w.h.p. We start with some basic notation in Section 7.4.1.
Section 7.4.2 presents a simpler synchronous parallel model for particle activations
that we can use to analyze the worst-case number of rounds. Section 7.4.3 presents
the analysis of the number of rounds required to coat the first layer. Finally, in
Section 7.4.4, we analyze the number of rounds required to complete all other coating
layers, once layer 1 has been completed.
7.4.1 Preliminaries
We start with some notation. Recall that Bi denotes the number of nodes of Geqt
at distance i from objectO (i.e., the number of nodes in layer i). LetN be the the layer
number of the final layer for n particles (i.e., N satisfies∑N−1
j=1 Bj < n ≤∑N
j=1Bj).
Layer i is said to be complete if every node in layer i is occupied by a contracted
retired particle (for i < N), or if all particles have reached their final position, are
contracted, and never move again (for i = N).
Given a configuration C, we define a directed graph A(C) over all nodes in Geqt
occupied by active (follower or root) particles in C. For every expanded active particle
p in C, A(C) contains a directed edge from the tail to the head of p. For every
follower p, A(C) has a directed edge from the head of p to p.parent. For the purposes
of constructing A(C), we also define parents for root particles: a root particle p sets
p.parent to be the active particle q occupying the node in direction p.dir once p has
performed its first handover expansion with q. For every root particle p, A(C) has a
directed edge from the head of p to p.parent, if it exists. Certainly, since every node
has at most one outgoing edge in A(C), the nodes of A(C) form either a collection
103

of disjoint trees or a ring of trees. A ring of trees may occur in any layer, but only
temporarily; the leader election primitive ensures that a leader emerges and retires
in layer 1 and marker particles emerge and retire in higher layers, causing the ring in
A(C) to break. The super-roots defined in Section 6.2.2 correspond to the roots of
the trees in A(C).
A movement executed by a particle p can be either a sole contraction in which p
contracts and leaves a node unoccupied, a sole expansion in which p expands into an
adjacent unoccupied node, a handover contraction with p′ in which p contracts and
forces its contracted neighbor p′ to expand into the node it vacates, or a handover
expansion with p′ in which p expands into a node currently occupied by its expanded
neighbor p′, forcing p′ to contract.
7.4.2 From asynchronous to parallel schedules
In this section, we show that instead of analyzing our algorithm for asynchronous
activations of particles, it suffices to consider a much simpler model of parallel acti-
vations of particles. Define a movement schedule to be a sequence of particle system
configurations (C0, . . . , Ct).
Definition 1: A movement schedule (C0, . . . , Ct) is called a parallel schedule if
each Ci is a valid configuration of a connected particle system (i.e., each particle is
either expanded or contracted, and every node of Geqt is occupied by at most one
particle) and for every i ≥ 0, Ci+1 is reached from Ci such that for every particle p
one of the following properties holds:
1. p occupies the same node(s) in Ci and Ci+1,
2. p expands into an adjacent node that was empty in Ci,
3. p contracts, leaving the node occupied by its tail empty in Ci+1, or
104

4. p is part of a handover with a neighboring particle p′.
While these properties allow at most one contraction or expansion per particle in
moving from Ci to Ci+1, multiple particles may move in this time.
Consider an arbitrary fair asynchronous activation sequence A for a particle sys-
tem, and let C(A)i , for 0 ≤ i ≤ t, be the particle system configuration at the end of
asynchronous round i in A if each particle moves according to Algorithm 7. A forest
schedule S = (A, (C0, . . . , Ct)) is a parallel schedule (C0, . . . , Ct) with the property
that A(C0) is a forest of one or more trees, and each particle p follows the unique path
Pp which it would have followed according to A, starting from its position in C0. This
implies that A(Ci) remains a forest of trees for every 1 ≤ i ≤ t. A forest schedule is
said to be greedy if all particles perform movements according to Definition 7.4.2 in
the direction of their unique paths whenever possible.
We begin our analysis with a result that is critical to both describing configurations
of particles in greedy forest schedules and quantifying the amount of progress greedy
forest schedules make over time. Specifically, we show that if a forest’s configuration is
“well-behaved” at the start, then it remains so throughout its greedy forest schedule,
guaranteeing that progress is made once every two configurations.
Lemma 26. Given any fair asynchronous activation sequence A, consider any greedy
forest schedule (A, (C0, . . . , Ct)). If every expanded parent in C0 has at least one
contracted child, then every expanded parent in Ci also has at least one contracted
child, for 1 ≤ i ≤ t.
Proof. Suppose to the contrary that Ci is the first configuration that contains an
expanded parent p which has all expanded children. We consider all possible expanded
and contracted states of p and its children in Ci−1 and show that none of them can
result in p and its children all being expanded in Ci. First suppose p is expanded in
105

Ci−1; then by supposition, p has a contracted child q. By Definition 7.4.2, q cannot
perform any movements with its children (if they exist), so p performs a handover
contraction with q, yielding p contracted in Ci, a contradiction. So suppose p is
contracted in Ci−1. We know p will perform either a handover with its parent or a
sole expansion in direction p.dir since it is expanded in Ci by supposition. Thus, any
child of p in Ci−1 — say q — does not execute a movement with p in moving from
Ci−1 to Ci. Instead, if q is contracted in Ci−1 then it remains contracted in Ci since
it is only permitted to perform a handover with its unique parent p; otherwise, if q
is expanded, it performs either a sole contraction if it has no children or a handover
with one of its contracted children, which it must have by supposition. In either case,
p has a contracted child in Ci, a contradiction.
As a final observation, two trees of the forest may “merge” when the super-root s
of one tree performs a sole expansion into an unoccupied node adjacent to a particle
q of another tree. However, since s is a root and thus only defines q as its parent after
performing a handover expansion with it, the lemma holds in this case as well.
For any particle p in a configuration C of a forest schedule, we define its head
distance dh(p, C) (resp., tail distance dt(p, C)) to be the number of edges along Pp
from the head (resp., tail) of p to the end of Pp. Depending on whether p is contracted
or expanded, we have dh(p, C) ∈ dt(p, C), dt(p, C)−1. For any two configurations C
and C ′ and any particle p, we say that C dominates C ′ w.r.t. p, denoted C(p) C ′(p),
if and only if dh(p, C) ≤ dh(p, C ′) and dt(p, C) ≤ dt(p, C′). We say that C dominates
C ′, denoted C C ′, if and only if C dominates C ′ with respect to every particle.
Then it holds:
Lemma 27. Given any fair asynchronous activation sequence A which begins at an
initial configuration C(A)0 in which every expanded parent has at least one contracted
106

child, there is a greedy forest schedule S = (A, (C0, . . . , Ct)) with C0 = C(A)0 such that
C(A)i Ci for all 0 ≤ i ≤ t.
Proof. We first introduce some supporting notation. Let M(p) = p(1), p(2), . . . be the
sequence of movements p executes according to A. Let Mi(p) denote the remaining
sequence of movements in M(p) after the forest schedule reaches Ci, and let mi(p)
denote the first movement in Mi(p).
Claim 3. A greedy forest schedule S = (A, (C0, . . . , Ct)) can be constructed from con-
figuration C0 = C(A)0 such that, for every 0 ≤ i ≤ t, configuration Ci is obtained
from Ci−1 by executing only the movements of a greedily selected, mutually compatible
subset of mi−1(p) : p ∈ P.
Proof. Argue by induction on i, the current configuration number. C0 is trivially
obtained, as it is the initial configuration. Assume by induction that the claim holds
up to Ci−1. W.l.o.g. let Mi−1 = mi−1(p1), . . . ,mi−1(pk), for k ≤ n, be the greedily
selected, mutually compatible subset of movements that S performs in moving from
Ci−1 to Ci. Suppose to the contrary that a movement m′(p) 6∈ Mi−1 is executed
by a particle p ∈ P . It is easily seen that m′(p) cannot be mi−1(p); since mi−1(p)
was excluded when Mi−1 was greedily selected, it must be incompatible with one or
more of the selected movements and thus cannot also be executed at this time. So
m′(p) 6= mi−1(p), and we consider the following cases:
Case 1: mi−1(p) is a sole contraction. Then p is expanded and has no children in
Ci−1, so we must have m′(p) = mi−1(p), since there are no other movements p could
execute, a contradiction.
Case 2: mi−1(p) is a sole expansion. Then p is contracted and has no parent in
Ci−1, so we must have m′(p) = mi−1(p), since there are no other movements p could
execute, a contradiction.
107

Case 3: mi−1(p) is a handover contraction with q, one of its children. Then at
some time in S before reaching Ci−1, q became a descendant of p; thus, q must also
be a descendant of p in Ci−1. If q is not a child of p in Ci−1, there exists a particle
z 6∈ p, q such that q is a descendant of z, which is in turn a descendant of p. So
in order for mi−1(p) to be a handover contraction with q, M(z) must include actions
which allow z to “bypass” its ancestor p, which is impossible. So q must be a child
of p in Ci−1, and must be contracted at the time mi−1(p) is performed. If q is also
contracted in Ci−1, then once again we must have m′(p) = mi−1(p). Otherwise, q
is expanded in Ci−1, and must have become so before Ci−1 was reached. But this
yields a contradiction: since S is greedy, q would have contracted prior to this point
by executing either a sole contraction if it has no children, or a handover contraction
with a contracted child whose existence is guaranteed by Lemma 26, since every
expanded parent in C0 has a contracted child.
Case 4: mi−1(p) is a handover expansion with q, its unique parent. Then we must
have that mi−1(q) is a handover contraction with p, and an argument analogous to
that of Case 3 follows.
We conclude by showing that each configuration of the greedy forest schedule S
constructed according to the claim is dominated by its asynchronous counterpart.
Argue by induction on i, the configuration number. Since C0 = C(A)0 , we have that
C(A)0 C0. Assume by induction that for all rounds 0 ≤ r ≤ i−1, we have C
(A)r Cr.
Consider any particle p. Since S is constructed using the exact set of movements p
executes according to A and each time p moves it decreases either its head distance
or tail distance by 1, it suffices to show that p has performed at most as many
movements in S up to Ci as it has according to A up to C(A)i . If p does not perform
a movement between Ci−1 and Ci, we trivially have C(A)i (p) Ci(p). Otherwise,
108

p performs movement mi−1(p) to obtain Ci from Ci−1. If p has already performed
mi−1(p) according to A before reaching C(A)i−1, then clearly C
(A)i (p) Ci(p). Otherwise,
mi−1(p) must be the next movement p is to perform according to A, since p has
performed the same sequence of movements in the asynchronous execution as it has
in S up to the respective rounds i− 1, and thus has equal head and tail distances in
Ci−1 and C(A)i−1. It remains to show that p can indeed perform mi−1(p) between C
(A)i−1
and C(A)i . If mi−1(p) is a sole expansion, then p is the super-root of its tree (in both
Ci−1 and C(A)i−1) and must also be able to expand in C
(A)i−1. Similarly, if mi−1(p) is a
sole contraction, then p has no children (in both Ci−1 and C(A)i−1) and must be able to
contract in C(A)i−1. If mi−1(p) is a handover expansion with its parent q, then q must be
expanded in Ci−1. Parent q must also be expanded in C(A)i−1; otherwise dh(q, C
(A)i−1) >
dh(q, Ci−1), contradicting the induction hypothesis. An analogous argument holds if
mi−1(p) is a handover contraction with one of its contracted children. Therefore, in
any case we have C(A)i (p) Ci(p), and since the choice of p was arbitrary, C
(A)i
Ci.
We can show a similar dominance result when considering complaint flags.
Definition 2: A movement schedule (C0, . . . , Ct) is called a complaint-based par-
allel schedule if each Ci is a valid configuration of a particle system in which every
particle holds at most one complaint flag (rather than two, as described in Algo-
rithm 9) and for every i ≥ 0, Ci+1 is reached from Ci such that for every particle p
one of the following properties holds:
1. p does not hold a complaint flag and property 1, 3, or 4 of Definition 7.4.2 holds,
2. p holds a complaint flag f and expands into an adjacent node that was empty
in Ci, consuming f ,
109

3. p forwards a complaint flag f to a neighboring particle p′ which either does not
hold a complaint flag in Ci or is also forwarding its complaint flag.
A complaint-based forest schedule S = (A, (C0, . . . , Ct)) has the same properties
as a forest schedule, with the exception that (C0, . . . , Ct) is a complaint-based parallel
schedule as opposed to a parallel schedule. A complaint-based forest schedule is said
to be greedy if all particles perform movements according to Definition 7.4.2 in the
direction of their unique paths whenever possible.
We can now extend the dominance argument to hold with respect to complaint
distance in addition to head and tail distances. For any particle p holding a complaint
flag f in configuration C, we define its complaint distance dc(f, C) to be the number of
edges along Pp from the node p occupies to the end of Pp. For any two configurations
C and C ′ and any complaint flag f , we say that C dominates C ′ w.r.t. f , denoted
C(f) C ′(f), if and only if dc(f, C) ≤ dc(f, C′). Extending the previous notion of
dominance, we say that C dominates C ′, denoted C C ′, if and only if C dominates
C ′ with respect to every particle and with respect to every complaint flag.
It is also possible to construct a greedy complaint-based forest schedule whose
configurations are dominated by their asynchronous counterparts, as we did for greedy
forest schedules in Lemma 27. Many of the details are the same, so as to avoid
redundancy we highlight the differences here. The most obvious difference is the
inclusion of complaint flags. Definition 7.4.2 restricts particles to holding at most
one complaint flag at a time, where Algorithm 9 allows a capacity of two. This
allows the asynchronous execution to not “fall behind” the parallel schedule in terms
of forwarding complaint flags. Basically, Definition 7.4.2 allows a particle p holding
a complaint flag f in the parallel schedule to forward f to its parent q even if q
currently holds its own complaint flag, so long as q is also forwarding its flag at this
time. The asynchronous execution does not have this luxury of synchronized actions,
110

so the mechanism of buffering up to two complaint flags at a time allows it to “mimic”
the pipelining of forwarding complaint flags that is possible within one round of a
complaint-based parallel schedule.
Another slight difference is that a contracted particle cannot expand into an empty
adjacent node unless it holds a complaint flag to consume. However, this restriction
reflects Algorithm 10, so once again the greedy complaint-based forest schedule can
be constructed directly from the movements taken in the asynchronous execution.
Moreover, since this restriction can only cause a contracted particle to remain con-
tracted, the conditions of Lemma 26 are still upheld. Thus, we obtain the following
lemma:
Lemma 28. Given any fair asynchronous activation sequence A which begins at an
initial configuration C(A)0 in which every expanded parent has at least one contracted
child, there is a greedy complaint-based forest schedule S = (A, (C0, . . . , Ct)) with
C0 = C(A)0 such that C
(A)i Ci for all 0 ≤ i ≤ t.
By Lemmas 27 and 28, once we have an upper bound for the time it takes a greedy
forest schedule to reach a final configuration, we also have an upper bound for the
number of rounds required by the asynchronous execution. Hence, the remainder of
our proofs will serve to upper bound the number of parallel rounds any greedy forest
schedule would require to solve the coating problem for a given valid instance (P,O),
where |P | = n. Let S∗ = (A, (C0, . . . , Cf )) be such a greedy forest schedule, where
C0 is the initial configuration of the particle system P (of all contracted particles)
and Cf is the final coating configuration.
In Sections 7.4.3 and 7.4.4, we will upper bound the number of parallel rounds
required by S∗ in the worst case to coat the first layer and higher layers, respec-
tively. More specifically, we will bound the worst-case time it takes to complete a
111

layer i once layers 1, . . . , i − 1 have been completed. For convenience, we will not
differentiate between complaint-based and regular forest schedules in the following
sections, since the same dominance result holds whether or not complaint flags are
considered. To prove these bounds, we need one last definition: a forest–path schedule
S = (A, (C0, . . . , Ct), L) is a forest schedule (A, (C0, . . . , Ct)) with the property that
all the trees of A(C0) are rooted at a path L = v1v2 · · · v` ⊆ Geqt, and each particle p
must traverse L in the same direction.
7.4.3 First layer: complaint-based coating and leader election
Our algorithm must first organize the particles using the spanning forest primitive,
whose runtime is easily bounded:
Lemma 29. Following the spanning forest primitive, the particles form a spanning
forest within O(n) rounds.
Proof. Initially all particles are idle. In each round any idle particle adjacent to the
object, an active (follower or root) particle, or a retired particle becomes active. It
then sets its parent flag if it is a follower, or becomes the root of a tree if it is adjacent
to the object or a retired particle. In each round at least one particle becomes active,
so — given n particles in the system — it will take O(n) rounds in the worst case
until all particles join the spanning forest.
For ease of presentation, we assume that the particle system is of sufficient size to
fill the first layer (i.e., B1 ≤ n; the proofs can easily be extended to handle the case
when B1 > n); we also assume that the root of a tree also generates a complaint flag
upon its activation (this assumption does not hurt our argument since it only increases
the number of the flags generated in the system). Let S1 = (A, (C0, . . . , Ct1), L1) be
the greedy forest–path schedule where (A, (C0, . . . , Ct1)) is a truncated version of S∗,
112

Ct1 — for t1 ≤ f — is the configuration in S∗ in which layer 1 becomes complete,
and L1 is the path of nodes in layer 1. The following lemma shows that the algorithm
makes steady progress towards completing layer 1.
Lemma 30. Consider a round i of the greedy forest–path schedule S1, where 0 ≤ i ≤
t1− 2. Then within the next two parallel rounds of S1, (i) at least one complaint flag
is consumed, (ii) at least one more complaint flag reaches a particle in layer 1, (iii)
all remaining complaint flags move one position closer to a super-root along L1, or
(iv) layer 1 is completely filled (possibly with some expanded particles).
Proof. If layer 1 is filled, (iv) is satisfied; otherwise, there exists at least one super-root
in A(Ci). We consider several cases:
Case 1: There exists a super-root s in A(Ci) which holds a complaint flag. If s is
contracted, then it can expand and consume its flag by the next round. Otherwise,
consider the case when s is expanded. If it has no children, then within the next two
rounds it can contract and expand again, consuming its complaint flag; otherwise, by
Lemma 26, s must have a contracted child with which it can perform a handover to
become contracted in Ci+1 and then expand and consume its complaint flag by Ci+2.
In any case, (i) is satisfied.
Case 2: No super-root in A(Ci) holds a complaint flag and not all complaint flags
have been moved from follower particles to particles in layer 1. Let p1, p2, . . . , pz
be a sequence of particles in layer 1 such that each particle holds a complaint flag,
no follower child of any particle except pz holds a complaint flag, and no particles
between the next super-root s and p1 hold complaint flags. Then, as each pi forwards
its flag to pi−1 according to Definition 7.4.2, the follower child of pz holding a flag is
able to forward its flag to pz, satisfying (ii).
113

Case 3: No super-root in A(Ci) holds a complaint flag and all remaining complaint
flags are held by particles in layer 1. By Definition 7.4.2, since no preference needs
to be given to flags entering layer 1, all remaining flags will move one position closer
to a super-root in each round, satisfying (iii).
We use Lemma 30 to show first that layer 1 will be filled with particles (some
possibly still expanded) in O(n) rounds. From that point on, in another O(n) rounds,
one can guarantee that expanded particles in layer 1 will each contract in a handover
with a follower particle, and hence all particles in layer 1 will be contracted, as we
see in the following lemma:
Lemma 31. After O(n) rounds, layer 1 must be filled with contracted particles.
Proof. We first prove the following claim:
Claim 4. After 8B1 + 2 rounds of S, layer 1 must be filled with particles.
Proof. Suppose to the contrary that after 8B1 + 2 rounds, layer 1 is not completely
filled with particles. Then none of these rounds could have satisfied (iv) of Lemma 30,
so one of (i), (ii), or (iii) must be satisfied every two rounds. Case (i) can be satisfied
at most B1 times (accounting for at most 2B1 rounds), since a super-root expands
into an unoccupied position of layer 1 each time a complaint flag is consumed. Case
(iii) can also be satisfied at most B1 times (accounting for at most 2B1 rounds), since
once all remaining complaint flags are in layer 1, every flag must reach a super-root
in B1 moves. Thus, the remaining 8B1 + 2 − 2B1 − 2B1 = 4B2 + 2 rounds must
satisfy (ii) 2B1 +1 times, implying that 2B1 +1 flags reached particles in layer 1 from
follower children. But each particle can hold at most one complaint flag, so at least
B1+1 flags must have been consumed and the super-roots have collectively expanded
into at least B1 + 1 unoccupied positions, a contradiction.
114

By the claim, it will take at most 8B1 + 2 rounds until layer 1 is completely
filled with particles (some possibly expanded). In at most another B1 rounds, every
expanded particle in layer 1 will contract in a handover with a follower particle (since
B1 ≤ n), and hence all particles in layer 1 will be contracted after O(B1) = O(n)
rounds.
Once layer 1 is filled, the leader election primitive can proceed. The full description
of the Universal Coating algorithm in Section 6 uses a node-based version of the leader
election algorithm in [26] for this primitive. For consistency, we kept this description
of the primitive here as well. However, in order to formally prove with high probability
guarantees on the runtime of our universal coating algorithm, we use a Monte Carlo
variant of the leader election algorithm in [26]. A description of this variant and its
corresponding proofs appear in [27]. This updated algorithm elects a leader with high
probability and gives the following runtime bound.
Lemma 32. Within O(n) further rounds, a position of layer 1 has been elected as
the leader position, w.h.p.
Once a leader position has been elected and either no more followers exist (if
n ≤ B1) or all positions are completely filled by contracted particles (which can be
checked in an additional O(B1) rounds), the particle currently occupying the leader
position becomes the leader particle. Once a leader has emerged, the particles on
layer 1 retire, which takes O(B1) further rounds. Together, we get:
Corollary 2. The worst-case number of rounds for S∗ to complete layer 1 is O(n),
w.h.p.
115

7.4.4 Higher layers
We again use the dominance results we proved in Section 7.4.2 to focus on parallel
schedules when proving an upper bound on the worst-case number of rounds —
denoted by Layer(i) — for building layer i once layer i−1 is complete, for 2 ≤ i ≤ N .
The following lemma provides a more general result which we can use for this purpose.
Lemma 33. Consider any greedy forest–path schedule S = (A, (C0, . . . , Ct), L) with
L = v1v2 · · · v` and any k such that 1 ≤ k ≤ `. If every expanded parent in C0 has at
least one contracted child, then in at most 2(`+ k) configurations, nodes v`−k+1 · · · v`
will be occupied by contracted particles.
Proof. Let s be the super-root closest to v`, and suppose s initially occupies node vi
in C0. Additionally, suppose there are at least k active particles in C0 (otherwise,
we do not have sufficient particles to occupy k nodes of L). Argue by induction on
k, the number of nodes in L starting with v` which must be occupied by contracted
particles. First suppose that k = 1. By Lemma 26, every expanded parent has
at least one contracted child in any configuration Cj, so s is always able to either
expand forward into an unoccupied node of L if it is contracted or contract as part of
a handover with one of its children if it is expanded. Thus, in at most 2(`+k) = 2`+2
configurations, s has moved forward ` positions, is contracted, and occupies its final
position v`−k+1 = v`.
Now suppose that k > 1 and that each node v`−x+1, for 1 ≤ x ≤ k − 1, becomes
occupied by a contracted particle in at most 2(`+k−1) = 2(`+k)−2 configurations. It
suffices to show that v`−k+1 also becomes occupied by a contracted particle in at most
two additional configurations. Let p be the particle currently occupying v`−k+1 (such
a particle must exist since we supposed we had sufficient particles to occupy k nodes
and S ensures the particles follow this unique path). If p is contracted in C2(`+k)−2,
116

then it remains contracted and occupying v`−k+1, so we are done. Otherwise, if p is
expanded, it has a contracted child q by Lemma 26. Particles p and q thus perform
a handover in which p contracts to occupy only v`−k+1 at C2(`+k)−1, proving the
claim.
For convenience, we introduce some additional notation. Let ti (resp., Cti) be the
round (resp., configuration) in which layer i becomes complete.
When coating some layer i, each root particle either moves either (a) through the
nodes in layer i in the set direction dir (CW or CCW) for layer i, or (b) through the
nodes in layer i+1 in the opposite direction over the already retired particles in layer i
until it finds an empty position in layer i. We bound the worst-case scenario for these
two movements independently in order to get a an upper bound on Layer(i). Let
Li = v1, . . . , vBibe the path of nodes in layer i listed in the order that they appear from
the marker position v1 following direction dir, and let Si = (A, (Cti−1+1, . . . , Cti), Li)
be the greedy forest–path schedule where (A, (Cti−1+1, . . . , Cti)) is a section of S∗.
By Lemma 33, it would take O(Bi) rounds for all (a) movements to complete; an
analogous argument shows that all (b) movements complete in O(Bi+1) = O(Bi)
rounds. This implies the following lemma:
Lemma 34. Starting from configuration Cti−1+1, the worst-case additional number of
rounds for layer i to become complete is O(Bi).
Putting it all together, for layers 2 through N :
Corollary 3. The worst-case number of rounds for S∗ to coat layers 2 through N is
O(n).
Proof. Starting from configuration Ct1+1, it follows from Lemma 34 that the worst-
case number of rounds for S∗ to reach a legal coating of the object is upper bounded
117

byN∑i=2
Layer(i) ≤ c
N∑i=2
Bi = Θ(n),
where c > 0 is a constant.
Combining Corollaries 2 and 3, we get that S∗ requires O(n) rounds w.h.p. to
coat any given valid object O starting from any valid initial configuration of the set
of particles P . By Lemmas 27 and 28, the worst-case behavior of S∗ is an upper
bound for the runtime of our Universal Coating algorithm, so we conclude:
Theorem 13. The total number of asynchronous rounds required for the Universal
Coating algorithm to reach a legal coating configuration, starting from an arbitrary
valid instance (P,O), is O(n) w.h.p., where n is the number of particles in the system.
7.5 Simulation Results
In this section we present a brief simulation-based analysis of our algorithm which
shows that in practice our algorithm exhibits a better than linear average competitive
ratio. Since OPT(P,O) (as defined in Section 7.3) is difficult to compute in general,
we investigate the competitiveness with the help of an appropriate lower bound for
OPT(P,O). Recall the definitions of the distances d(p, q) and d(p, U) for p, q ∈ Veqt
and U ⊆ Veqt. Consider any valid instance (P,O). Let L be the set of all legal particle
positions of (P,O); that is, L contains all sets U ⊆ Veqt such that the positions in U
constitute a coating of the object O by the particles in the system.
We compute a lower bound on OPT(P,O) as follows. Consider any U ∈ L, and let
G(P,U) denote the complete bipartite graph on partitions P and U . For each edge
e = (p, u) ∈ P ×U , set the cost of the edge to w(e) = d(p, u). Every perfect matching
in G(P,U) corresponds to an assignment of the particles to positions in the coating.
The maximum edge weight in a matching corresponds to the maximum distance a
118

Figure 7.4: (a) shows the number of rounds varying the number of particles. (b) shows the
ratio of number of rounds to the lower bound in log scale. (c) shows the number of rounds
varying the static hexagon radius.
particle has to travel in order to take its place in the coating. Let M(P,U) be the
set of all perfect matchings in G(P,U). We define the matching dilation of (P,O) as
MD(P,O) = minU∈L
(min
M∈M(P,U)
(maxe∈M
(w(e))
)).
Since each particle has to move to some position in U for some U ∈ L to solve the
coating problem, we have OPT(P,O) ≥ MD(P,O). The search for the matching that
minimizes the maximum edge cost for a given U ∈ L can be realized efficiently by
reducing it to a flow problem using edges up to a maximum cost of c and performing
binary search on c to find the minimal c such that a perfect matching exists. We note
that our lower bound is not tight. This is due to the fact that it only respects the
distances that particles have to move but ignores the congestion that may arise, i.e.,
in certain instances the distances to the object might be very small, but all particles
may have to traverse one “chokepoint” and thus block each other.
We implemented the Universal Coating algorithm in the amoebot simulator (see [1]
for videos). For simplicity, each simulation is initialized with the object O as a regular
hexagon of object particles; this is reasonable since the particles need only know where
their immediate neighbors in the object’s border are relative to themselves, which can
119

be determined independently of the shape of the border. The particle system P is
initialized as idle particles attached randomly around the hexagon’s perimeter. The
parameters that were varied between instances are the radius of the hexagon and the
number of (initially idle) particles in P . Each experimental trial randomly generates
a new initial configuration of the system.
Figure 7.4(a) shows the number of rounds needed to complete the coating with
respect to the hexagon object radius and the number of particles in the system. The
number of rounds plotted are averages over 20 instances of a given |P | with 95%
confidence intervals. These results show that, in practice, the number of rounds re-
quired increases linearly with particle system size. This agrees with our expectations,
since leader election depends only on the length of the object’s surface while layering
depends on the total number of particles. Figure 7.4(b) shows the ratio of the num-
ber of rounds to the matching dilation of the system. These results indicate that,
in experiment, the average competitive ratio of our algorithm may exhibit closer to
logarithmic behaviors. Figure 7.4(c) shows the number of rounds needed to complete
the coating as the radius of the hexagon object is varied. The runtime of the algo-
rithm appears to increase linearly with both the number of active particles and the
size of the object being coated, and there is visibly increased runtime variability for
systems with larger radii.
120

Chapter 8
CONCLUSIONS
In this dissertation we considered programmable matter consisting of simple com-
putational elements, called particles, that can establish and release bonds and can
actively move in a self-organized way, and we investigated the feasibility of solving
fundamental problems relevant for programmable matter. As a model for such self-
organizing particle systems, we proposed general amoebot model which abstracts from
any geometry information as well as the geometric variant of the model called geomet-
ric amoebot model. Based on the geometric model, we presented efficient local-control
algorithms for leader election and line formation problems requiring only particles
with constant size memory. We also discussed the limitations of solving these prob-
lems within the general amoebot model. We showed that the leader election problem
in the geometric amoebot model can be decided deterministically if all the particles
have a common orientatio and presented an algorithm for that. As before, particles
are anonymous, have constant-size memory, have a common chirality (i.e. they are
able to distinguish clockwise from counter-clockwise rotation), and utilize only local
interactions. Moreover, we presented a general algorithmic framework for shape for-
mation problems in SOPS, and showed direct applications of this framework to the
problems of having the particle system self-organize to form a hexagonal or triangular
shape. Our algorithms utilize only local control, require only constant-size memory
particles, and are asymptotically optimal in terms of the total number of movements
needed to reach the desired shape. We then developed a work-optimal Universal
Coating algorithm for the smart paint problem on SOPS. The algorithm needed to
seamlessly adapt to any valid object O, uniformly coating the object by forming mul-
121

tiple coating layers if necessary. We then evaluated the performance of our algorithm
in terms of amount of work and total elapsed time until it terminates. In particular,
we showed that the proposed algorithm terminates within a linear number of rounds
with high probability. In addition, we presented a matching linear lower bound that
holds with high probability. This lower bound is used to show a linear lower bound
on the competitive gap between fully local coating algorithms and coating algorithms
that rely on global information, which implies that our proposed algorithm is also
optimal in a competitive sense. Simulation results show that the competitive ratio of
our algorithm may be better than linear in practice.
One may refer to [54, 53, 7] for other work done by the Ph.D. candidate which is
not directly related to this dissertation.
122

REFERENCES
[1] https://sops.engineering.asu.edu/simulations/.
[2] L. M. Adleman. Molecular computation of solutions to combinatorial problems.Science, 266(11):1021–1024, 1994.
[3] C. Agathangelou, C. Georgiou, and M. Mavronicolas. A distributed algorithmfor gathering many fat mobile robots in the plane. In Proceedings of the 2013ACM symposium on Principles of distributed computing, pages 250–259. ACM,2013.
[4] R. Ananthakrishnan and A. Ehrlicher. The forces behind cell movement. Inter-national Journal of Biological Sciences, 3(5):303–317, 2007.
[5] D. Angluin, J. Aspnes, Z. Diamadi, M. J. Fischer, and R. Peralta. Computa-tion in networks of passively mobile finite-state sensors. Distributed Computing,18(4):235–253, 2006.
[6] D. Arbuckle and A. Requicha. Self-assembly and self-repair of arbitrary shapesby a swarm of reactive robots: algorithms and simulations. Autonomous Robots,28(2):197–211, 2010.
[7] S. Banerjee, A. Das, A. Mazumder, Z. Derakhshandeh, and A. Sen. On theimpact of coding parameters on storage requirement of region-based fault tolerantdistributed file system design. In Computing, Networking and Communications(ICNC), 2014 International Conference on, pages 78–82. IEEE, 2014.
[8] L. Barriere, P. Flocchini, E. Mesa-Barrameda, and N. Santoro. Uniform scat-tering of autonomous mobile robots in a grid. Int. Journal of Foundations ofComputer Science, 22(3):679–697, 2011.
[9] A. Beckers and T. Worsch. A perimeter–time CA for the queen bee problem.Parallel Computing, 27(5):555–569, 2001.
[10] Y. Benenson, T. Paz-Elizur, R. Adar, E. Keinan, Z. Livneh, and E. Shapiro. Pro-grammable and autonomous computing machine made of biomolecules. Nature,414(6862):430–434, 2001.
[11] A. Bhattacharyya, M. Braverman, B. Chazelle, and H. Nguyen. On the conver-gence of the hegselmann-krause system. CoRR, abs/1211.1909, 2012.
[12] L. Blazovics, K. Csorba, B. Forstner, and H. Charaf. Target tracking and sur-rounding with swarm robots. In ECBS, pages 135–141, 2012.
[13] L. Blazovics, T. Lukovszki, and B. Forstner. Target surrounding solution forswarm robots. In EUNICE, pages 251–262, 2012.
[14] D. Boneh, C. Dunworth, R. J. Lipton, and J. Sgall. On the computational powerof DNA. Discrete Applied Mathematics, 71:79–94, 1996.
123

[15] V. Bonifaci, K. Mehlhorn, and G. Varma. Physarum can compute shortest paths.In ACM SODA, pages 233–240, 2012.
[16] M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo. Swarm robotics: areview from the swarm engineering perspective. Swarm Intelligence, 7(1):1–41,2013.
[17] Z. J. Butler, K. Kotay, D. Rus, and K. Tomita. Generic decentralized controlfor lattice-based self-reconfigurable robots. International Journal of RoboticsResearch, 23(9):919–937, 2004.
[18] B. Chazelle. Natural algorithms. In Proc. of ACM-SIAM SODA, pages 422–431,2009.
[19] H.-L. Chen, D. Doty, D. Holden, C. Thachuk, D. Woods, and C.-T. Yang. Fastalgorithmic self-assembly of simple shapes using random agitation. In DNAComputing and Molecular Programming, pages 20–36. Springer, 2014.
[20] M. Chen, D. Xin, and D. Woods. Parallel computation using active self-assembly.In DNA Computing and Molecular Programming, pages 16–30. Springer, 2013.
[21] K. C. Cheung, E. D. Demaine, J. R. Bachrach, and S. Griffith. Programmableassembly with universally foldable strings (moteins). IEEE Transactions onRobotics, 27(4):718–729, 2011.
[22] G. Chirikjian. Kinematics of a metamorphic robotic system. In Proceedings ofICRA ’94, volume 1, pages 449–455, 1994.
[23] M. Cieliebak, P. Flocchini, G. Prencipe, and N. Santoro. Distributed computingby mobile robots: Gathering. SIAM Journal on Computing, 41(4):829–879, 2012.
[24] R. Cohen and D. Peleg. Local spreading algorithms for autonomous robot sys-tems. Theoretical Computer Science, 399(1-2):71–82, 2008.
[25] S. Das, P. Flocchini, N. Santoro, and M. Yamashita. On the computationalpower of oblivious robots: forming a series of geometric patterns. In Proceedingsof the 29th Annual ACM Symposium on Principles of Distributed Computing,PODC 2010, Zurich, Switzerland, July 25-28, 2010, pages 267–276, 2010.
[26] J. Daymude, Z. Derakhshandeh, R. Gmyr, T. Strothmann, R. A. Bazzi, A. W.Richa, and C. Scheideler. Leader election and shape formation with self-organizing programmable matter. In arXiv:1503.07991., 2016.
[27] J. J. Daymude, R. Gmyr, A. W. Richa, C. Scheideler, and T. Strothmann. Leaderelection with high probability for self-organizing programmable matter. CoRR,abs/1701.03616, 2017.
[28] X. Defago and S. Souissi. Non-uniform circle formation algorithm for oblivi-ous mobile robots with convergence toward uniformity. Theoretical ComputerScience, 396(1-3):97–112, 2008.
124

[29] E. D. Demaine, M. J. Patitz, R. T. Schweller, and S. M. Summers. Self-assemblyof arbitrary shapes using rnase enzymes: Meeting the kolmogorov bound withsmall scale factor (extended abstract). In Proceedings of STACS ’11, pages 201–212, 2011.
[30] Z. Derakhshandeh, S. Dolev, R. Gmyr, A. W. Richa, C. Scheideler, and T. Stroth-mann. Brief announcement: amoebot - a new model for programmable matter.In ACM SPAA, pages 220–222, 2014.
[31] Z. Derakhshandeh, R. Gmyr, A. Porter, A. W. Richa, C. Scheideler, andT. Strothmann. On the runtime of universal coating for programmable matter.In DNA22., 2016. It also appears in arXiv:1606.03642. Submitted to NaturalComputing, Invited submission.
[32] Z. Derakhshandeh, R. Gmyr, A. W. Richa, C. Scheideler, and T. Strothmann. Analgorithmic framework for shape formation problems in self-organizing particlesystems. In NANOCOM, pages 21:1–21:2, 2015.
[33] Z. Derakhshandeh, R. Gmyr, A. W. Richa, C. Scheideler, and T. Strothmann.Universal shape formation for programmable matter. In Proceedings of the 28thACM Symposium on Parallelism in Algorithms and Architectures, pages 289–299.ACM, 2016.
[34] Z. Derakhshandeh, R. Gmyr, A. W. Richa, C. Scheideler, and T. Strothmann.Universal coating for programmable matter. Theoretical Computer Science,dx.doi.org/10.1016/j.tcs.2016.02.039, 2016. It also appears as arXiv:1601.01008.2016.
[35] Z. Derakhshandeh, R. Gmyr, T. Strothmann, R. Bazzi, A. Richa, and C. Schei-deler. Brief announcement: On the feasibility of leader election and shape for-mation with self-organizing programmable matter. In Proceedings of the 2015ACM Symposium on Principles of Distributed Computing, pages 67–69. ACM,2015.
[36] Z. Derakhshandeh, R. Gmyr, T. Strothmann, R. A. Bazzi, A. W. Richa, andC. Scheideler. Leader election and shape formation with self-organizing pro-grammable matter. In DNA 21., pages 117–132., 2015.
[37] D. Doty. Theory of algorithmic self-assembly. Comm. of ACM, 55(12):78–88,2012.
[38] P. Flocchini, D. Ilcinkas, A. Pelc, and N. Santoro. Computing without com-municating: Ring exploration by asynchronous oblivious robots. Algorithmica,65(3):562–583, 2013.
[39] P. Flocchini, G. Prencipe, N. Santoro, and P. Widmayer. Arbitrary patternformation by asynchronous, anonymous, oblivious robots. Theoretical ComputerScience, 407(1):412–447, 2008.
125

[40] T. Fukuda, S. Nakagawa, Y. Kawauchi, and M. Buss. Self organizing robotsbased on cell structures - cebot. In Proceedings of IROS ’88, pages 145–150,1988.
[41] T.-R. Hsiang, E. Arkin, M. Bender, S. Fekete, and J. Mitchell. Algorithms forrapidly dispersing robot swarms in unknown environments. In Proceedings of the5th Workshop on Algorithmic Foundations of Robotics (WAFR), pages 77–94,2002.
[42] A. Itai and M. Rodeh. Symmetry breaking in distributive networks. In 22ndAnnual Symposium on Foundations of Computer Science, Nashville, Tennessee,USA, 28-30 October 1981, pages 150–158, 1981.
[43] S. Kernbach, editor. Handbook of Collective Robotics – Fundamentals and Chal-langes. Pan Stanford Publishing, 2012.
[44] P. Kling and F. Meyer auf der Heide. Convergence of local communication chainstrategies via linear transformations. In Proceedings of the 23rd ACM Symposiumon Parallelism in Algorithms and Architectures, pages 159–166, 2011.
[45] G. P. Kumar and S. Berman. Statistical analysis of stochastic multi-robot bound-ary coverage. In ICRA, pages 74–81, 2014.
[46] K. Li, K. Thomas, C. Torres, L. Rossi, and C.-C. Shen. Slime mold inspired pathformation protocol for wireless sensor networks. In ANTS, pages 299–311, 2010.
[47] N. A. Lynch. Distributed algorithms. Morgan Kaufmann, 1996.
[48] J. McLurkin. Analysis and Implementation of Distributed Algorithms for Multi-Robot Systems. PhD thesis, Massachusetts Institute of Technology, 2008.
[49] O. Michail and P. G. Spirakis. Simple and efficient local codes for distributedstable network construction. In ACM PODC, pages 76–85, 2014.
[50] M. J. Patitz. An introduction to tile-based self-assembly and a survey of recentresults. Natural Computing, 13(2):195–224, 2014.
[51] T. Pavlic, S. Wilson, G. Kumar, and S. Berman. An enzyme-inspired approachto stochastic allocation of robotic swarms around boundaries. In ISRR, pages16–19, 2013.
[52] M. Rubenstein, A. Cornejo, and R. Nagpal. Programmable self-assembly in athousand-robot swarm. Science, 345(6198):795–799, 2014.
[53] S. Shirazipourazad, Z. Derakhshandeh, and A. Sen. Analysis of on-line routingand spectrum allocation in spectrum-sliced optical networks. In 2013 IEEEInternational Conference on Communications (ICC), pages 3899–3903. IEEE,2013.
[54] S. Shirazipourazad, C. Zhou, Z. Derakhshandeh, and A. Sen. On routing andspectrum allocation in spectrum-sliced optical networks. In INFOCOM, 2013Proceedings IEEE, pages 385–389. IEEE, 2013.
126

[55] T. Toffoli and N. Margolus. Programmable matter: concepts and realization.Physica D: Nonlinear Phenomena, 47(1):263–272, 1991.
[56] X. Trepat, M. R. Wasserman, T. E. Angelini, E. Millet, D. A. Weitz, J. P. Butler,and J. J. Fredberg. Physical forces during collective cell migration. Naturephysics, 5(6):426–430, 2009.
[57] J. E. Walter, J. L. Welch, and N. M. Amato. Distributed reconfiguration ofmetamorphic robot chains. Distributed Computing, 17(2):171–189, 2004.
[58] Y. Wang, P. Brown, and Y. Xia. Nanomedicine: Swarming towards the target.Nature Materials, 10(7):482–483, 2011.
[59] S. Wilson, T. Pavlic, G. Kumar, A. Buffin, S. C. Pratt, and S. Berman. Design ofant-inspired stochastic control policies for collective transport by robotic swarms.Swarm Intelligence, 8(4):303–327, 2014.
[60] E. Winfree, F. Liu, L. A. Wenzler, and N. C. Seeman. Design and self-assemblyof two-dimensional dna crystals. Nature, 394(6693):539–544, 1998.
[61] D. Woods. Intrinsic universality and the computational power of self-assembly.In Machines, Computations and Universality., pages 16–22, 2013.
[62] D. Woods, H.-L. Chen, S. Goodfriend, N. Dabby, E. Winfree, and P. Yin. Activeself-assembly of algorithmic shapes and patterns in polylogarithmic time. InITCS, pages 353–354, 2013.
[63] M. Yim, W.-M. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, andG. S. Chirikjian. Modular self-reconfigurable robot systems. IEEE RoboticsAutomation Magazine, 14(1):43–52, 2007.
127