Embed Size (px)
Citation preview

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 1/17
A Multi-agent Based Framework for the Simulation of Human and Social Behaviors during EmergencyEvacuations
Xiaoshan Pan1
, Charles S. Han2
, Ken Dauber 3
, Kincho H. Law4
Abstract
Many computational tools for the simulation and design of emergency evacuation and egress are now available. However, due to the scarcity of human and social behavioral
data, these computational tools rely on assumptions that have been found inconsistent or unrealistic. This paper presents a multi-agent based framework for simulating human
and social behavior during emergency evacuation. A prototype system has beendeveloped, which is able to demonstrate some emergent behaviors, such as competitive,
queuing, and herding behaviors. For illustration, an example application of the system for safe egress design is provided.
1. Introduction
This paper presents a multi-agent based framework to simulate human and social behaviors during emergency evacuations. Among the many regulatory provisionsgoverning a facility design, one of the key issues identified by facility managers and
building inspectors is safe egress. Design of egress for places of public assembly is aformidable problem in facility and safety engineering. There have been numerous
incidents reported regarding overcrowding and crushing during emergency situations [1].In addition to injuries and loss of lives, the accompanying post-disaster psychological
suffering, financial loss, and adverse publicity have long-term negative effects on theaffected individuals and organizations - the survivors, the victims’ families, and the local
communities.Among the many factors including overcrowding and evacuation incidents,
researchers have come to realize that understanding human and social behaviors in
emergencies is crucial to improve crowd safety in places of public assembly [2-6]. In particular, ‘nonadaptive crowd behaviors’ are recognized to be responsible for the death
and injury of most victims in crowd disasters [7]. Nonadaptive crowd behaviors refer tothe destructive actions that a crowd may experience in emergency situations, such as
stampede, pushing, knocking, and trampling on others. Studying nonadaptive crowd behaviors in emergency situations is difficult since it often requires exposing real peopleto the actual, possibly dangerous, environment. A good computational tool that takes into
consideration the human and social behavior of a crowd could serve as a viablealternative.
Commercially available computational tools for the simulation and design of emergency exits exist. However, most of the current computational tools focus on the
modeling of spaces and occupancies but rarely take into consideration of human and
1 Graduate Student, Department of Civil and Environmental Engineering, Stanford University, CA94305-4020, [email protected]
2 Consulting Assistant Professor, Department of Civil and Environmental Engineering, Stanford
University, CA 94305-4020, [email protected] Deputy Director, Stanford Center for Innovations in Learning, Stanford University, CA 94305-
4020, [email protected] Professor, Department of Civil and Environmental Engineering, Stanford University, CA 94305-
4020, [email protected]
1

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 2/17
social behaviors. As a result, none of the current models have been able to cover the
range of scenarios suitable for safety engineering purpose [8]. A computational modelthat incorporates human and social behavior requires not only to simulate human
cognitive processes at an individual level but also to capture the emergent evacuation patterns of a crowd during evacuation. Most existing evacuation models do not pay
sufficient attention to either the cognitive or social aspects of human behaviors [5,19].A multi-agent simulation framework is a computational methodology that allows
building an artificial environment populated with autonomous agents which are capableof interacting with each other. We believe such a framework is particularly suitable for
simulating individual cognitive processes and behavior and for exploring emergent phenomena such as social or collective behaviors. At a microscopic level, the framework represents human individuals as autonomous agents equipped with sensors, decision-
making rules, and actuators. At a macroscopic level, the framework models human social behaviors as emergent phenomena through simulating the interactions among agents or
groups in a virtual environment. We have prototyped a Multi-Agent Simulation Systemfor Egress analysis (MASSEgress) that is able to model some of the frequently observedhuman social behaviors in emergencies, such as competitive, queuing, and herding
behaviors, through simulating the cognitive processes of individual agents andinteractions among multiple agents in an artificial environment.
2. Related WorkA wide variety of computational tools for the simulation and design of exits are now
available. To review all existing computational models for egress analysis is beyond thescope of this paper. Generally speaking, most existing models can be categorized into (1)
fluid or particle systems, (2) matrix-based systems, and (3) emergent systems:
• Many have considered the analogy between fluid and particle motions (including
interactions) and crowd movement. One example of fluid or particle systems is the panic simulation system built by Helbing et al. [11]. Coupling fluid dynamic and“self-driven” particle models with discrete virtual reality simulation techniques, these
systems attempt to simulate and to help design evacuation strategies. Recent studieshave revealed that the fluid or particle analogies of crowd are untenable. As noted by
Still [8], “the laws of crowd dynamics have to include the fact that people do notfollow the laws of physics; they have a choice in their direction, have no conservation
of momentum and can stop and start at will.” Fluid or particle analogies alsocontradict with some observed crowd behaviors, such as herding behavior, multi-directional flow, and uneven crowd density distribution. For example, herding
behavior is often observed during the evacuation of a crowd in a room with two exits -one exit is clogged while the other is not fully utilized [12]. However, a fluid or
particle analogy would likely predict that both exits were being used efficiently.Furthermore, it is difficult for fluid or particle systems to properly model bi-
directional flows (with people moving in opposite directions) in a very crowdedenvironment [8]. Earlier “self-driven” particle models, such as Exodus [10], are now
enhanced to capture behavioral characteristics of occupants. Exodus is now considered by
some as an agent-based system [20].
• The basic idea of a matrix-based system is to discretize a floor area into cells. Cellsare used to represent free floor areas, obstacles, areas occupied by individuals or a
group of people, or regions with other environmental attributes. People transit fromcell to cell based on occupancy rules defined for the cells. Two well known examples
of the matrix-based systems are Egress [9] and Pedroute [13], which have been
2

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 3/17
applied to simulate evacuation in buildings as well as train (and underground) stations.
It was suggested that the existing matrix-based models suffer from the difficulties of simulating crowd cross flow and concourses; furthermore, the assumptions employed
in these models are questionable when compared with field observations [8].Moreover, because the size of cells and the associated constraints need to be adjusted
when creating new models, the output of these models depend highly on the user’sskill.
• The concept of emergent systems is that the interactions among simple parts cansimulate complex phenomena such as crowd dynamics [14-16]. One example of theemergent systems is the Legion system [8,17]. It should be noted that Legion was not
designed as a crowd behavioral analysis system but an investigation tool for the studyof large scale interactive systems. Current emergent systems typically oversimplify
the behavioral representation of individuals. For example, the Legion system employsonly four parameters (goal point, speed, distance from others, and reaction time) and
one decision rule (based on assumption of the least effort) to represent the complexnature of individual behaviors. Furthermore, all individuals are considered to be the
same in terms of size, mobility, and decision-making process. Finally, the model
ignores many important social behaviors such as herding and leader influence. Nevertheless, the emergent concept is intriguing since it has the notion that crowd behavior is a collection of individuals’.
In summary, as noted by the Society of Fire Protection Engineers [5], “(computational)models are attractive because they seem to more accurately simulate evacuations.
However, due to the scarcity of behavioral data, they tend to rely heavily on assumptionsand it is not possible to gauge with confidence their predictive accuracy.” There has beenincreasing interests in studying human factors in emergencies [2,6,18], however, “the
fundamental understanding of the sociological and psychological components of pedestrian and evacuation behaviors is left wanting [19].” This view is also echoed by
Santos and Aguirre [20], who point out that current models have largely ignored insightsregarding human and social behaviors from the fields of social psychology and socialorganization.
3. Crowd BehaviorsUnderstanding the emergence and nature of crowd behaviors in emergency situations is
necessary prior to the construction of a computational simulation framework. Crowd behaviors are complex phenomena, which may better be examined at three different
levels: the individual, the interactions among individuals, and the group. These threelevels of categorization are not independent but intimately related and often overlapped.
3.1 The IndividualFrom a human cognitive psychological perspective, an individual’s behaviors can beviewed as the outcomes of his/her decision-making process. We conjecture that an
individual’s decision-making process follows three basic conventions: following instinct,following experience, and bounded rationality. An individual may select one or a
combination of these basic conventions when facing an emergency, depending on thespecific situation that the individual encounters.
• Following instinct: An instinct refers to an inborn pattern of behavior responsive tospecific stimuli. Executing an instinct does not require a conscious thought process.Some examples of human instincts are fear, death and survival. While a new born
baby typically functions by following instincts, Wills [21] claims that the behaviors
3

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 4/17
of human adults can also be largely explained in terms of instincts, and human adults
can experience and act on instincts without being conscious of them. The knowledgethat an adult has learnt through his/her life experience can be viewed as the extension
of his/her instincts. When there is a need to make decisions under high stress,following one’s instincts is one’s most primitive way that an individual relies on in
making instantaneous and quick decisions. According to Quarantelli [22], if anindividual perceives that he/she is in an extreme life-threatening situation, his/her
behaviors are likely driven by the fear instinct such as fight or flight. Behaviors, suchas pushing others down, jumping out of windows, and fleeing towards deadly
blocked exits, occur because of fear.
• Following experience: An individual often relies heavily on his/her personalexperiences in making decisions. Because many life events are highly repetitive, an
individual usually develops a set of relatively standard routines over time or from past experience and then applies them to similar situations in the future. In the case of
emergency egress, it is widely recognized that an individual’s experiences cansignificantly impact his/her behavior [2,5,23,24], such as the familiarity of the
surroundings, safety procedures, and fire drills. However, “using prior evacuation
experience to guide future evacuation decisions, may or may not produce better outcomes” (p. 146) [25]. One observed phenomenon is that most people tend to exit a building following the route that they are most familiar with, and ignore alternate
routes. Decision-making in terms of following experience is usually straightforwardand quick. The process typically follows three basic steps: (1) recognize a situation
that is the same as or similar to an experience in the past; (2) retrieve the routines thatwere successful according to prior experience; and (3) carry out the routines.
• Bounded rationality:The idea of bounded rationality has been integrated into many
conventional social theories and come to dominate most theories of individualdecision making [26]. The concept of rational decision-making assumes that a
decision is based on an evaluation of alternatives in terms of their consequences for preferences. The process involves four basic steps: (1) search for possible options; (2)
anticipate the consequences that might follow each option; (3) weigh eachconsequence with preferences; and (4) choose the most favorable option. Such a
decision process is “bounded”, because usually not all options are known, not allconsequences are considered, and not all preferences are evoked at the same time.
Decision-making in terms of bounded rationality concerns with combining new factswith existing knowledge for problem-solving, and it is one of the fundamentalcharacteristics that constitute human intelligence. The resulted solution usually is
more appropriate for the given situation comparing to a solution obtained througheither following instinct or experience; but the “rational” decision making process
does require a longer processing time. In an emergency situation where decisionsneed to be made instantly, an individual may opt for a faster method by simply
following instincts or experiences, resulting at times what referred to as irrational behaviors [27]. On the other hand, altruistic and prosocial behaviors are commonlyobserved in emergencies [2,23]; this implies that individuals do practice rational
thinking during emergencies. “Rational” or “irrational” behaviors thus dependheavily on the time and severity factor as “perceived” by an individual.
In summary, at the individual level, disruptive or nonadaptive behaviors emerged fromemergency situation are the outcome of an individual's decision-making process under
severe stress when perceiving a situation as highly important, highly uncertain and highly
4

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 5/17
urgent. As perceived stress increases, an individual may shift decision mechanisms from
following experience, bounded rational thinking, to following instincts.
3.2 The Interactions among IndividualsFrom the perspectives of social interaction, an individual’s social behaviors are shaped bysocial structures through following social identities [26]. Other crucial factors that also
strongly influence human social interaction include the respect of personal space [29] andthe principle of social proof [30].
• Social identity: It is a generally accepted observation that an individual in a crowdusually acts differently than when he/she is alone or in a small group [31]. Anindividual is also a social being. Being as a part of a society is one essential aspect of
a person. A society is organized through various social structures. In order to function properly, each social structure imposes certain rules on the individuals in the forms of
laws, regulations, cultures, and norms. A social structure usually is composed of diverse identities (i.e., social roles), and each identity has a set of associated rules,which defines how different identities interact with each other. As noted by March
[26], “Social systems socialize and educate individuals into rules associated with age,gender, social positions and identities. Decisions are shaped by the roles played by
decision makers.” Depending on an individual’s identity, his/her behaviors arestrongly shaped by these rules. Individual’s identity is also “internalized,” --
“accepting and pursuing it even without the presence of external incentives or sanctions [28].” Thus, a decision process based on social identity involves four basic
steps: (1) recognize a situation; (2) know the identity/role of the decision maker in thesituation; (3) find the appropriate behavioral rules associated with the identity/role;
and (4) follow the rules. In other words, individuals follow rules or procedures thatthey see as appropriate to the situation and identify themselves with. While social
identity is crucial in daily decision process, during an emergency, an individual whodemonstrates nonadaptive behaviors often appears to be highly individualistic andnonsocial [32]. On the other hand, it has been observed that many people (such as
trained officers) do behave according to their social identity during an emergency.Therefore, whether or not individuals remain to be consistent with their social
identities depends on their stress levels and tolerance. Stress levels, in turn, aredetermined by the combination of perceived value of loss, time available, anduncertainty of the situation [39].
• Personal spaces: From a human psychological perspective, one very important factor
that influences an individual’s social behaviors and decision making is the notion of personal space. According to Ashcraft and Scheflen [29], “Man is a territorial animal
very much like his fellow creatures. He defines a space and marks it out for his particular use. He draws visible and invisible boundaries which he expects others to
respect. He will defend a territory against the intrusions of others.” Under normalcircumstances, an individual seeks social interaction with others; at the same time, theindividual also tries to avoid intruding others’ privacy as well as to defend intrusions.
For example, people who are engaged in face-to-face conversation define a space thatothers outside the group are expected to respect; an outsider shows such respect by
not hearing or pretending not to hear the conversation, by not looking into theoccupied space, and by not cutting into the space surrounded by the group. Eventhough the actual definition of personal space varies among different cultures,
genders, and social structures, social norms are respected and maintained by theengaged parties except under anomalous situations such as overcrowding and
5

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 6/17
emergencies (e.g., fire), or during a confrontation. The respect of personal space
functions as a social rule to keep safe distances among individuals. When this rule isviolated in a crowded environment, the involved individuals would likely to
experience a higher level of stress and agitation than in a non-crowded environment[33]. Even so, people still make efforts to regain their personal spaces and avoid
physical contact with others [2]. When the density of a crowd reaches a certainmagnitude (such as the safety limit as suggested by Still [8]) any effort of
maintaining personal space among individuals is practically impossible, which could potentially lead to nonadaptive or disruptive crowd behaviors.
• Social proof: The dominant factor that leads people to seek social proof is the perceived uncertainty of a situation. When an individual encounters a new situationwith insufficient information, the individual is more likely to follow the actions of
others as a guide to determine how he/she might act – a phenomenon known as social proof. As noted by Cialdini [30], “we seem to assume that if a lot of people are doing
the same thing, they must know something we don’t… those people are probablyexamining the social evidence, too.” One well known example of social proof under
emergency situations is the herding behavior – when under highly uncertain and
stressful situations, an individual tends to follow others almost blindly. Sometimesherding behavior helps people to exit safely, and at other times, the herding behavior may lead people to a dead end or cause the blockages of some exits even though other
exits are not fully utilized. This is a particularly interesting phenomenon in crowddynamics and the phenomenon has now been incorporated in some computational
models [11]. Other instances in this category include social inhibition and diffusionof responsibility [2,34]. Social inhibition refers to the phenomenon that people do nottake initiatives but turn to each other first for social cues. “No one wishes to appear
foolishly excited over an event that is not an emergency, so each individual reactsinitially with a calm outward demeanor, while looking at others’ reactions [35,
p.285].” Diffusion of responsibility usually prevents people from taking altruisticactions. People often hesitate to initiate action to offer help in emergency in the presence of others. If no one makes the first move, it is less likely that any one would.
However, when others start to offer help, then individuals would likely follow as well.Therefore, initial reactors in an emergency have significant influences in a crowd. If
the initial reactors’ actions appear to be in a calm and orderly manner, the otherswould likely to remain calm and orderly. On the contrary, if the initial reactors start
to push, then the others would likely to react similarly.In summary, at the level of social interaction, nonadaptive behaviors emerged from an
emergency situation in a crowded environment likely occur if (1) individuals fail tocomply with their social identities and act non-socially, (2) individuals lose their personal
spaces and perceive a necessity to move urgently, and/or (3) due to a highly uncertain andstressful situation, individuals tend to follow others blindly as to seek social proof.
3.3 The GroupBy viewing a crowd or a group within a crowd as an entity, we can identify manysignificant factors that may contribute to crowd behaviors. Examples of such factors may
include: crowd density, environmental constraints, and peers’ imposed mental stresses.
• Crowd density: The higher the crowd density the more likely it is that comfort isdiminished and the risk to the individual increased [2,5]. People movement can be
highly restricted in a dense and crowded environment. As pointed out by Chertkoff and Kushigian [32], “[At high crowd density,] people are swept along with the flow,
6

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 7/17
completely unable to free themselves from the direction of that flow.” Under such a
situation, it becomes difficult for an individual even to keep his/her feet on theground in a stable way. People may not deliberately knock others down or trample on
them but accidents could occur easily under such circumstances. However, peoplemovement also tends to follow and keep in a group, as opposed to freely moving as
an individual. For example, members in a hierarchically structured group (such asfamilies) tend to stay together and follow the leader. The density of a crowd is an
important factor that can affect individual as well as group behaviors.
• Environmental constraint: People movement can also be restricted due toenvironmental constraints imposed by the spatial geometries. These constraints can
be inherent in the design or can be caused by improper usage of the space. A buildingmay have aisles and stairs too narrow to accommodate easy exit by a large crowd,
inadequate number of exterior exits, obstructed passageways, locked exterior doors,stairs or doors obscured by dim lighting or confusing signs, etc. When considering
crowd dynamics, we need to consider the environmental constraints and their impactson individual and group behaviors. Unfortunately, as Shields et al. [18] point out,
current design practice has primarily focused on emergency exit identification and
escape route illumination, but has ignored the cognitive and perceptual processesassociated with movement and spatial behavior of crowds under emergencyconditions.
• Perceived emotion and tension: An emergency can cause a widespread perceptionamong the people in a crowd that negative consequences could result for failing toexit a building within certain time. Field observations have shown that until such a
perception becomes widespread, people do not shove others out of the way or trampleon them [32]. As more people attempt to exit at once, the less of them are able to get
out successfully because of the congested and jammed routes. During emergency, because of the time pressure and the lack of information, an individual normally
judges the severity of a situation largely based on his/her observation of others’ behaviors. In other words, regardless of the nature of an emergency, how it impacts
an individual depends on the way that he/she perceives the situation and theenvironment, even though such a perception can be inaccurate or misguided.
Different perceptions by an individual towards an emergency result in differentemotions and mental stress levels, which can in turn provoke different decision
mechanisms. Even under non-emergency situations, disruptive crowd behaviors canoccur, as long as the situation creates high emotional arousal among the crowd, suchas false alarm, group fight, confrontation between a furious crowd and police, and
power outage, etc.In summary, at a group level, nonadaptive crowd behavior can occur if a crowd holds the
characteristics of high crowd density, severe environmental constraint, and highemotional arousal. The emotional arousal may or may not be originated from a real
emergency.The above discussions are not meant to be exhaustive, nevertheless it establishes a
formal structure to dissect the complex nature of crowd behaviors into simpler
components that can be better understood and implemented in a computationalframework. For examples, the rules derived at the individual level can be utilized to build
the decision-making module of an individual agent, and the rules extracted at the socialinteraction and group levels can be incorporated to model the interactions among agents
in a virtual environment.
7

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 8/17
Geom. Engine
Physical
Geometry
Population
Generator Individual
Agents
Crowd Simulation Engine
Visualizer Agents’
Positions
Individual
Behavior
Model-1
Individual
Behavior
Model-2
IndividualBehavior
Model-4
Individual
Behavior
Model-3
. . . IndividualBehavior
Model-n
Global Database(Global geometry information and the
state information of the agents)
Events Recorder Events
Figure 1: System Architecture.
4. A Multi-Agent Based Computational FrameworkThere are three main reasons for developing computer simulation for crowd behaviors:
first to test scientific theories and hypotheses; second, to test design strategies; third, tocreate phenomena about which to theorize [36]. Each crowd setting is unique. A full
understanding of crowd behaviors normally requires exposing real people to the specificenvironment for obtaining empirical data, which is difficult since such environments are
often dangerous in nature. In addition to studying crowd behavior based on observationsand historical records, computer simulation is a useful alternative that can provide
valuable information to evaluate a design, to help planning process, and for dealing withemergencies.
Human behaviors are complex emergent phenomena, which are difficult to captureinto computers as mathematical equations. Our framework adopts a multi-agent
simulation paradigm as a basic scheme. We believe that multi-agent based systems are
particularly suitable for simulating human individual cognitive processes and behaviorsin order to explore emergent macro phenomena such as social or collective behaviors
(which usually are not reducible to or understandable in terms of the micro propertiesof agents). Multi-agent simulation has been widely accepted as a promising approach tomodel complex emergent phenomena [14,37].
4.1 Overall System ArchitectureIn the MASSEgress framework, each human individual is modeled as an autonomousagent who interacts with a virtual environment and other agents according to an
Individual Behavior Model and some global rules on crowd dynamics – rules that derivedat the levels of interactions among individuals and group. Each agent has an imperfect
model of the world. Depending on the environment and the behavioral levels of individuals and their relationships with the group (or the crowd), the agent could interact
and react in a collaborative or competitive manner . In contrast to agent-based systems for design applications, there is no global system control in the simulation model. In fact, the
objective here is to be able to observe the potential “chaotic” dynamics among the
individuals (agents) as they enact their behavior in the simulation environment. Tosimulate human cognitive processes, a “perception-action” model is adopted in which an
agent continuously assesses or “senses” the surrounding environment and makesdecisions based on its decision model in a proactive fashion. The crowd social behaviorsare collectively observed as emergent phenomena.
8

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 9/17
Choose Rules
- Instinct rules
- Experience
-Social rules
- Rational inference
Get Crowd Density
Get Tension Level
Get Sensory Input
Output a
Decision Collision Check &
Update Position
Decision
Trigger
Individual Database
(Knowledge about environment -- building
geometry, exits, escape routes, etc.)
Global Database
(Global geometry and information about all
agents)
Figure 2: Individual Behavior Model.
The system architecture of MASSEgress is schematically shown in Figure 1. Thesystem consists six basic components: a Geometric Engine, a Population Generator, aGlobal Database, a Crowd Simulation Engine, an Events Recorder, and a Visualization
Environment.
• Geometric Engine: The purpose of this module is to produce the geometriesrepresenting the physical environment (e.g., a building or a train station, etc.).
AutoCAD/ADT (Architectural Desktop Software from AutoDesk, Inc.) is employedin this study. The geometric data is sent to the Crowd Simulation Engine to simulate
crowd behaviors.
• Population Generator . This module generates occupants based on the distribution of age, mobility, physical size, and type of facility to be investigated. For example, we
can assume most (not all) of the occupants in an office building will likely be familiar with the facility; on the other hand, the same assumption cannot be applied to a theme park. This module also generates random populations for statistical study of individual human behaviors and crowd behaviors.
• The Global Database. The database module is to maintain all the information about
the physical environment and the agents during the simulation. Although the multi-agent system does not have a centralized system control mechanism, the state
information (mental tension, behavior level, location) of the individuals ismaintained. This database also supports the interactions and reactions among the
individuals.
• The Events Recorder. This module is intended to capture the events that have beensimulated for retrieval and playback. The events captured can be used to compare
with known and archived scenarios for evaluation purpose.• The Visualizer. The visualization tool is primarily to display the simulated results.
We have developed a simple visualization environment that is able to receive the positions of agents, and then generates and displays 2D/3D visual images in real time.
• The Crowd Simulation Engine. The crowd simulation engine is the core module of the multi-agent system. Each agent is assigned with an “individual behavior model” based on the data generated from the population generator. The internal mechanism
of the Individual Behavior Model is based on the perception-action approach [40] and
9

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 10/17
consists of the following iterative steps (see Figure 2): (1) internally trigger for
decision; (2) perceive information about the situation (i.e., crowd density, sensoryinput, tension level); (3) interpret and choose decision rule(s) to make a decision; (4)
conduct collision check and execute the decision. Each autonomous agent proceedsto the (exit) goal subjected to the constraints imposed, interact with and update the
Global Database as simulations proceed over time.In addition to displaying crowd behaviors, the outputs of the system also include overall
and individual evacuation time, individual paths, and blockage locations.
4.2 Autonomous AgentsIn the prototype system, we represent human cognitive processes as the “perception-
action” behaviors of autonomous agents. That is, autonomous agents interact with avirtual environment and with each other following the simulated sensing, decision-
making, and reacting/acting processes (as depicted in Figure 2).An autonomous agent represents a human individual, and it bears a set of physical as
well as cognitive properties of a human individual. These properties include:
• Population type. Human individuals are different from each other by age, bodydimension, mobility and personality. The system currently includes five general
human categorizations, similar to Simulex [41] – Median, Adult Male, Adult Female,Child and Elderly. Each categorization represents a typical type of human population.
• Sensors. Each agent is equipped with a visual sensor so that it can analyze theenvironment. The visual sensor is developed using the ray tracing method [38]. By
casting laser rays from the eye position of an agent within a visual angle (e.g., 170degrees), an agent can compute the intersection of a ray and the near object, which
allows it to determine (1) the geometrical distance from the sensor to the intersectingobject, and (2) the type of the object that the ray intersects (see Figure 3). An agentcan also sense an object through ‘body contact’, that is, whenever a physical collision
is detected, the agent recognizes the location and the type of object it collides with.The information received from the sensors is utilized by an agent to make decisions.
• Decision rules. Agent’s actions are driven by decision rules. When a situation is perceived, an agent activates a decision rule to produce an action. The choice of adecision rule is determined by the situational cues and the agent’s psychological
factors (i.e., perceived importance, uncertainty and urgency) at that moment. For example, if an agent detects two exits and its uncertainty level is ‘high’, then theagent pursues the exit that has the most crowds (i.e., herding).
Sensing objects in a virtual environment Sensing an exit sign
agent
agent
obstacle
open
space
exit sign
Figure 3: Visual sensors using the ray tracing method.
10

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 11/17
• Actuators. Actuators of an agent refer to its faculties of being able to walk, run, stop,side-shift and turn. These faculties are the basic locomotion capacity of an agent to
maneuver in a virtual environment.The properties described form the basis of an agent’s behaviors in the prototype system,the system that is able to simulate not only simple behaviors (e.g., finding an exit) but
also complex social behaviors (e.g., queuing and herding behaviors).
4.3 Simulating Human Social Behavior Incorporating human and social behaviors in computational egress simulation is difficult
and challenging. Following a ‘bottom-up’ approach, by organizing the
decision rules of an agent into ahierarchical structure, we divide an
agent’s behaviors into threehierarchical layers (from simple to
complex): locomotion, steering, andsocial (see Figure 4). The behaviors on
a higher layer are constructed using the
behaviors from a lower layer. As anexample, for a group of agents to forma queue at a narrow door, the process could involve (1) the motion (such as moving a step)of an agent that takes place at the locomotion layer, (2) avoiding obstacle using a steering
behavior, which consists of a sequence of different locomotion, (3) exiting a door in anorderly manner as a type of social behavior. The following sections discuss how various
agent behaviors are implemented at each layer.
Steering: seek, follow, collision avoidance
locomotion: walk, run, stop, turn, side-shift
Social: competitive, queuing, herding
Figure 4: A hierarchy of agent behavior.
4.3.1 LocomotionBehaviors at the layer of locomotion are directly controlled by the actuators of an agent,corresponding to the simplest behaviors that an agent can conduct. We have implemented
six different types of agent locomotion – walking forward, running forward, stopping,
side-shifting, turning, and moving backward . To choose a locomotion type at a particular time step may be determined by either a decision rule or randomly (when rules are not
defined for a situation). As an example, if an agent detects an exit in front and there is noobstacle on its path toward the exit, then the agent chooses the walking forward
locomotion. However, if an agent is blocked by a crowd, it may choose randomly amongthe stopping (i.e., avoiding collision), turning (i.e., attempting a different path), or moving
backward (i.e., maintaining its personal space) locomotion.
4.3.2 Steering Behavior The concept of steering behavior has been widely used in robotics and artificial life.
Steering behaviors are essential for an autonomous agent to navigate its virtualenvironment in a realistic and improvisational manner. Combining steering behaviors can
be used to achieve higher level goals, such as getting from here to there while avoidingobstacles. The following steering behaviors are included in the prototype system:
• Random walk . Until a goal point is decided, an agent walks in the virtual environmentrandomly.
• Collision avoidance. This behavior gives an agent the ability to maneuver in thevirtual environment without running into an obstacle or other agents. Its
implementation is achieved by monitoring an agent’s sensory input and reacting to possible collisions. For example, if an agent detects obstacles both in front and on the
11

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 12/17
right but not on the left, then it steers toward the left. As another example, when two
agents are meeting head-on in a corridor, they would steer to the side to avoidrunning into each other.
• Seek. A seek acts to steer an agent toward a goal point. When a goal point is detected,an agent adjusts its orientation and velocity toward the goal. In addition, the agent
alters its orientation randomly by a small magnitude and then re-aligns it, producing alife-like motion while approaching the goal (it is interesting to note that from field
observations, human individuals usually do not walk along a straight line toward agoal point).
• Negotiation. Negotiation enables an agent to exchange information and reachagreements with others. For example, when a group of agents forms a queue at an
exit, they negotiate with each other to determine their positions in the queue. Theagents achieve this by informing each other their distances to the exit, and the ones
who are closer to the exit get higher priority in the queue.
• Target following . This behavior allows an agent to follow a moving target. A typicalexample is that an agent moves forward in a queue by following another agent who is
in front.
The steering behaviors described above serve as the basic building blocks for constructing more complex behaviors. In fact, an agent seldom continuously executes asingle steering behavior. In order to act in a complex environment, an agent has to select
among, and blend between, different steering behaviors to produce more complex andlife-like behavioral patterns. Combining steering behaviors can be accomplished either by
(1) switching between different behaviors as perceived situation changes (e.g., switchingfrom random walk to seek ), or (2) blending different behaviors together (e.g., blending
seek and collision avoidance).
4.3.3 Social Behavior Social behaviors are complex phenomena emerged from the interactions of a group of
autonomous agents. A single agent’s behavior is essentially nondeterministic at a
microscopic level; if the system is executed multiple times with the same initial setting,the agents would not behave exactly thesame way each time. However, at a
macroscopic level, certain behavioral patterns could be observed across themultiple runs. These social behavioral
patterns are called emergent phenomena.As of this writing, the prototype system
can demonstrate social emergent phenomena including competitive,queuing, and herding behaviors.
Competitive behavior is oftenobserved in emergency situations, when
human individuals compete for their ownchances of exiting (see Figure 5).
Competitive behavior usually leads to inefficient evacuations and/or nonadaptive crowd behaviors. In the system, competitive behavior occurs when agents execute the following
decision rules selectively: (1) walk randomly until a goal is determined, (2) seek the goalwith maximum velocity if possible and do not negotiate with other agents, (3) do not
preemptively avoid collision.
Figure 5: Competitive behavior
12

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 13/17

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 14/17
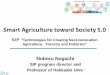
a. Initial configuration b. Escape trajectory of an occupant
c. 50 escape trajectories of the ‘test’
occupantd. Plot of cluster centroids and analysis
Figure-8: Using simulations for safe egress analysis
statistically by conducting multiple evacuation simulations with different occupantconfigurations. These evacuation patterns can provide insights to help improve the
design. The following scenario represents an instance of how to capture some evacuation patterns for a specific floor plan design.
Figure-8a depicts a hypothetical floor plan of an office building. The floor plancontains a number of office spaces organized along hallways and corridors. There are
two egress exits, exit A on the west and exit B on the south. We intend to find out
what are the evacuation patterns of the design from a perspective of egress.
At first, we place a ‘test’ occupant in a specific room with the presence of other occupants distributed randomly in other spaces. Evacuation simulations are then
performed many times (say 50 times in this example), with different spatial
distribution of the occupant. That is, for each simulation, while fixing the location of the ‘test’ occupant, we randomize the locations and behavioral types of other
occupants, so that the ‘test’ occupant would exhibit different evacuation behaviors for a range of different situations. Figure-8b shows an example escape trajectory of the
‘test’ occupant in one of the simulations.Figure-8c shows the 50 trajectories of the ‘test’ occupant from the simulations.
Using a K-Means clustering algorithm [42], the trajectory points are categorized into
clusters represented by a set of centroids. The resultant centroids are plotted as shown
in Figure-8d, and the size of each centroid reflects the number of trajectory points thatthe centroid contains. By analyzing the distribution of the centroids, we can identify
the primary and the secondary escape routes of the occupant, the relative frequency
for the usage of the routes, and the potential congested areas during evacuations. By
14

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 15/17
exploring different geometric configurations and re-arranging exit signs, a designer
can modify the floor plan to alleviate congested areas and to provide more efficientegress routes.
6. Summary and DiscussionAlthough there have been some research studies on crowd simulation for safety
engineering purposes, few efforts have been conducted to study the core of crowd safety problem – human and social behaviors in emergencies. In this paper, we discussednonadaptive crowd behaviors from three different levels – the individual, the interactions
among individuals, and the groups. Understanding of such potentially disruptive behaviors is important for designing a simulation system for emergency evacuation. We
then presented a computational framework for studying human and social behaviorsduring emergency evacuations. For demonstration purpose, we have prototyped a multi-
agent system based on the framework. The computational framework allows pre-defineddeterministic or random assignments of individuals and groups in the design space. Thesystem is able to model emergent human social behaviors, such as competitive behavior,
queuing behavior and herding behavior through simulating the behavior of human agentsat microscopic level. The potential of the framework for studying human and social
behaviors appears promising.Our future efforts include constructing a pool of human individual and social
behaviors, which can then be customized by users to model typical population types as to
test a broad range of emergency situations and design configurations. Physical modelssuch as pushing, knocking, are also being investigated. Modeling of accidental events
will also be a subject of further study. Additionally, we plan to further extend the tool to perform statistical analysis of evacuation patterns, times, flows and other design
parameters. It is expected that the computational framework can lead to valuablecontributions to the field of crowd safety research, which, due to recent natural and man-
made events, is fast becoming an important issue in facility design and management.
6. AcknowledgementsThis research is partially supported by the Center for Integrated Facility Engineering at
Stanford University. The authors would like to acknowledge the software support fromAutoDesk, Inc..
REFERENCES:[1] Crowd Dynamics Ltd., Crowd Disasters, Nov. 2004, available at
http://www.crowddynamics.com/Main/ Crowddisasters.html.[2] Bryan, J., “Human Behavior and Fire,” In Fire Protection Handbook , Eighteenth
Edition, Cote, A. (Ed.), National Fire Protection Association, pp. 8.1-8.30, 1997.[3] Ramachandran, G., “Human Behavior in Fires - A Review of Research in the United
Kingdom,” Fire Technology, 26(2): 149-155, May 1990.
[4] Fahy, R., and Proulx, G., “Collective Common Sense: A Study of Human Behavior during the World Trade Center Evacuation,” NFPA Journal , 87(2): 61, March, 1995.
[5] Society of Fire Protection Engineers, Engineering Guide to Human Behavior in Fire,Technical Report, August 2002.
[6] Proulx, G. and Richardson, J., “The Human Factor: Building Designers Often Forget
How Important the Reactions of Human Occupants Are When they Specify Fire andLife Safety Systems,” Canadian Consulting Engineer , 43(3): 35-36, May 2002.
15

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 16/17
[7] Wilson, G., “Logic Engineering in Public Safety,” In Engineering for Crowd Safety,
Smith, R. and Dickie, J. (Eds.), Proceedings of the International Conference onEngineering for Crowd Safety, London, UK, March 17-18, 1993, pp. 231-237.
[8] Still, G., Crowd Dynamics, Ph.D. thesis, University of Warwick, UK, 2000.[9] AEA Technology, A Technical Summary of the AEA EGRESS Code, Technical
Report, AEAT/NOIL/27812001/002(R), Issue 1, 2002, available athttp://www.aeat-safety-and-
risk.com/Downloads/Egress%20Technical%20Summary.pdf.[10] Fire Safety Engineering Group, BuildingEXODUS: the evacuation Model for the
Building Environment , Sept. 2003, available athttp://fseg.gre.ac.uk/exodus/air.html#build.
[11] Helbing, D., Farkas, I., and Vicsek, T., “Simulating Dynamical Features of Escape
Panic,” Nature, 407:487-490, 2000.[12] Low, D., “Following the Crowd,” Nature, 407:465-466, September 2000.
[13] Halcrow Group Limited, Pedroute, Sept. 2003, available athttp://www.halcrow.com/pdf/ urban_reg/pedrt_broch.pdf.
[14] Epstein, J., and Axtell, R., Growing Artificial Societies: Social Science from the
Bottom Up, MIT Press, Cambridge, MA, 1996.[15] Johnson, S., Emergence: The Connected Lives of Ants, Brains, Cities, and Software,
Simon & Schuster, New York, 2001.[16] Waldrop, M., Complexity: The Emerging Science at the Edge of Order and Chaos,
Simon & Schuster, New York, 1992.[17] Legion International Ltd., Legion, Nov. 2004, available at http://www.legion.biz/
[18] Shields, T. and Proulx, G., “The Science of Human Behavior: Past ResearchEndeavors, Current Developments and Fashioning a Research Agenda,”
Proceedings of the Sixth International Symposium on Fire Safety Science, IAFSS, pp.95-114, 2000.
[19] Galea, E., (Ed.), Pedestrian and Evacuation Dynamics, London, CMC Press, 2003.[20] Santos G. and Aguirre, B., “A Critical Review of Emergency Evacuation Simulation
Models,” Proceedings of Building Occupant Movement during Fire Emergencies,Gaithersburg, Maryland, June 10-11, 2004.
[21] Wills, R. H., Human Instincts, Everyday Life, and the Brain, (Volume One), the
Book Emporium, Canada, 1998.[22] Quarantelli, E., “The Nature and Conditions of Panic,” The American Journal of
Sociology, 60(3): 267-275, 1954.[23] Horiuchi, S., Murozaki, Y., and Hokugo, A., “A Case Study of Fire and Evacuation
in a Multi-Purpose Office Building,” Proceedings of the First International
Symposium, Hemisphere Publishing Corp., Washington, DC, pp. 523-532, 1986,[24] Sime, J., “Perceived Time Available: The Margin of Safety in Fires,” Fire Safety
Science - Proceedings of the First International Symposium, Hemisphere Publishing
Corp., Washington, DC, pp.561-570, 1986.[25] Averill, J., Mileti, D., Peacock, R., Kuligowski, E., Groner, N., Proulx, G., Reneke,
P., and Nelson, H., “Occupant Behavior, Egress, and Emergency Communications,”
NIST NCSTAR 1-7 , September, 2005.[26] March, J., A Primer on Decision Making: How Decisions Happen, Free Press, New
York, 1994.[27] Le Bon, G., The Crowd , Viking, New York, 1960.
[28] McDougall, W., The Group Mind , Cambridge University Press, UK, 1920.
16

8/3/2019 AI&Society
http://slidepdf.com/reader/full/aisociety 17/17
17
[29] Ashcraft, N. and Scheflen, A. E., People Space: the Making and Breaking of Human Boundaries, Anchor Press, New York, 1976.
[30] Cialdini, R., Influence: The Psychology of Persuasion, William Morrow, New York,
1993.[31] Braun, A., Musse, S. R., de Oliveira, L., and Bodmann, B., “Modeling Individual
Behaviors in Crowd Simulation”, Proceedings of CASA: Computer Animation &
Social Agents, New Jersey, pp.143-148, May 2003.
[32] Chertkoff, J. and Kushigian, R., Don’t Panic: The Psychology of Emergency Egressand Ingress, Praeger, London, 1999.
[33] Sommer, R., Personal Space: The Behavioral Basis of Design, Englewood Cliffs, New Jersey, Prentice-Hall International, 1969.
[34] Latane, B., and Darley, J., “Group Inhibition of Bystander Intervention in
Emergencies,” Journal of Personality and Social Psychology, 10(3):215-221, 1968.[35] Batson, D., “Altruism and Prosocial Behavior,” The Handbook of Social Psychology,
Fourth Edition, Gilbert, D., Fiske, S., and Lindzey, G., (Eds), Boston, Mcgraw-hillCompanies, pp. 282-316, 1998.
[36] Penn, A., “Vision, Configuration and Simulation of Static Interaction for Design,”
Proceedings of 2nd International Conference: Pedestrian and Evacuation Dynamics, pp. 1-16, 2003.
[37] Weiss, G. (ed), Multiagent Systems: A Modern Approach to Distributed AI , MITPress, 2000.
[38] Wooldridge, M. and Jennings, N.R., “Intelligent Agents: Theory and Practice,”
Knowledge Engineering Review, 10(2):115-152, 1995.
[39] Billings, R., Milburn, T., and Schaalman, M., “A Model of Crisis Perception: ATheoretical and Empirical Analysis,” Administrative Science Quarterly , 25(2):300-
316, 1980.[40] Nakamura, T. and Asada, M., “Motion Sketch: Acquisition of Visual Motion Guided
Behaviors,” IJCAI'95, 1:126-132, 1995.[41] Thompson, P., Lindstrom, H., Ohlsson, P., and Thompson, S., “Simulex: Analysis
and Changes for IMO Compliance,” Proceedings of 2nd International Conference: Pedestrian and Evacuation Dynamics, pp. 173-184, 2003.
[42] MacQueen, J., “Some Methods for classification and Analysis of Multivariate
Observations,” Proceedings of 5th Berkeley Symposium on Mathematical Statistics
and Probability, Berkeley, University of California Press, 1:281-297, 1967.