Embed Size (px)
Citation preview
A.I. Final Assignment Submitted by: M. Rehan Asghar BSSE 6 - 15126
Submitted to: Miss Amina Khan 3/7/17 Department of CS & IT
A.I. Final Assignment
1
A.I. ASSIGNMENT
Question no 1: Differentiate between the followings:
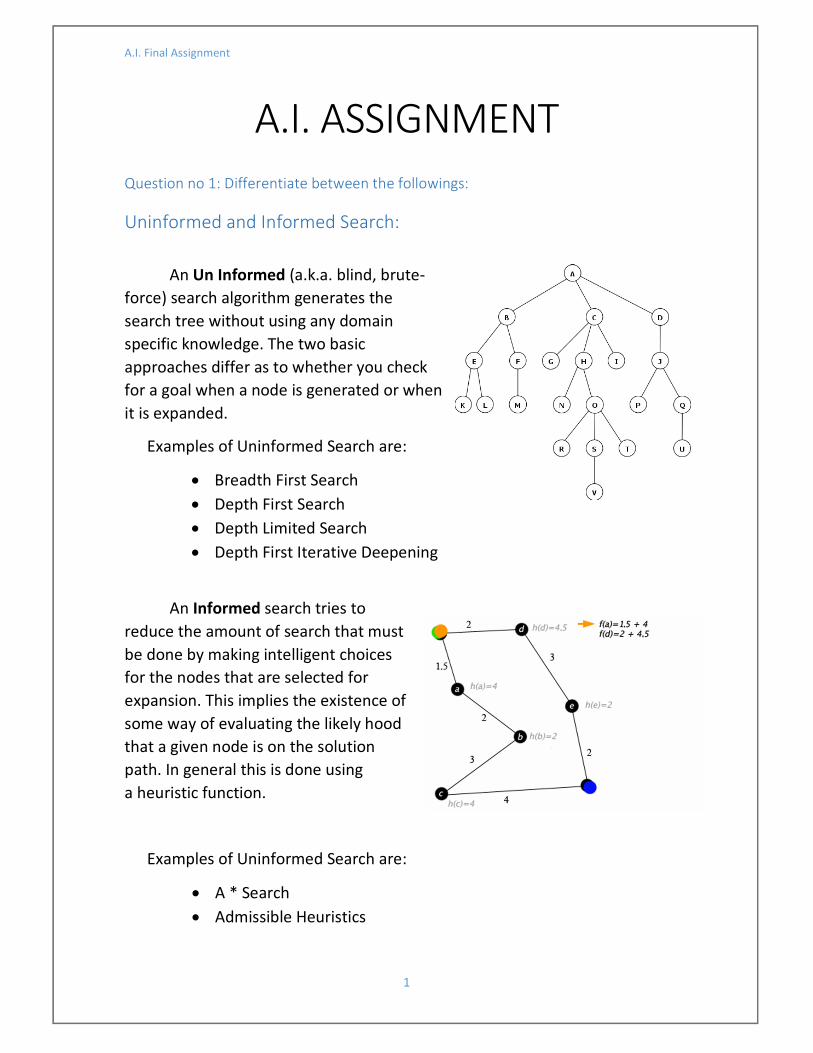
Uninformed and Informed Search:
An Un Informed (a.k.a. blind, brute-
force) search algorithm generates the
search tree without using any domain
specific knowledge. The two basic
approaches differ as to whether you check
for a goal when a node is generated or when
it is expanded.
Examples of Uninformed Search are:
• Breadth First Search
• Depth First Search
• Depth Limited Search
• Depth First Iterative Deepening
An Informed search tries to
reduce the amount of search that must
be done by making intelligent choices
for the nodes that are selected for
expansion. This implies the existence of
some way of evaluating the likely hood
that a given node is on the solution
path. In general this is done using
a heuristic function.
Examples of Uninformed Search are:
• A * Search
• Admissible Heuristics
A.I. Final Assignment
2
Question no 1: Differentiate between the followings:
Blind and Heuristics Search:
A blind search (also called an uninformed search) is a search that has no
information about its domain. The only thing that a blind search can do is
distinguish a non-goal state from a goal state.
For example: Breadth and Depth First Searches
In Artificial Intelligence and mathematical optimization, a heuristic is a
technique designed for solving a problem more quickly when classic methods
are too slow, or for finding an approximate solution when classic methods fail
to find any exact solution. This is achieved by trading optimality,
completeness, accuracy, or precision for speed. In a way, it can be considered a
shortcut.
A heuristic function, also called simply a heuristic, is a function that
ranks alternatives in search algorithms at each branching step based on
available information to decide which branch to follow.
For Example: A * Search etc.
Q2: Suppose you have to implement a voice enabled interface for
your laptop. What problems could you face while developing the
software?
Ans: If I have to implement a voice enabled interface for my laptop, then
there could be the number of problems in the implementation depending
upon the conditions, functionalities and atmosphere.
Some of the possible problems could be like following:
1. First, my voice should be recognized well.
2. My voices accent should be understandable for the interface.
3. I have to design a virtual voice interface so that it could understand the
common language and words.
4. It should not confuse if the communication left uncompleted.
5. It should be able to understand whether the said word means to
interpret as a word or a call to do something.
A.I. Final Assignment
3
6. It should be able to interpret as many words and commands as it could
do.
7. One challenge is if we increases the domain of the voice enabled
interface then the difficulties will increase directly proportional to it.
8. As our system will rely on the context and the conversations by us, it
should be able to interpret the functionalities well.
9. If a word said is not recognizable by the system, then it should not crash
or call the wrong functionality but it should ask for repeat or should
stop.
These and many more could be the challenges in the implementation of
a voice enabled interface.
Q3: This question is related to your term project. What if you have
to convert your project into a computer vision based project? Which
module will you choose to change and why?
Ans: Our term project was to
develop a spying car like robot
with camera so that we can send
live feedback, take photos and
videos of the surroundings.
If I have to convert my
project into a computer vision
based project then I will try to
change the program of the robot.
I would like to use an algorithm
that my robot could learn about its surroundings rather than just being
controlled by the Bluetooth remote controller.
I would like to use feedback neural network algorithm so that it could learn
about things and remind them. If it could recognize things wrong then it cold
be able to send it as a feedback and learn it so next time it recognizes it
correctly.