Embed Size (px)
DESCRIPTION
slide
Citation preview

Aerodynamics
Lecture 1:
Introduction - Equations of
Motion
G. Dimitriadis

Definition
• Aerodynamics is the science that analyses the flow of air around solid bodies
• The basis of aerodynamics is fluid dynamics
• Aerodynamics only came of age after the first aircraft flight by the Wright brothers
• The primary driver of aerodynamics progress is aerospace and more particularly aeronautics

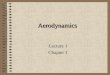
Applications (1)
Basic phenomena:
Flow around a cylinder
Shock wave Flow around an airfoil

Applications (2)
Trailing vortices High lift devices
Low speed aerodynamics

Applications (3)
High speed aerodynamics
F14 shock wave causes
condensation
F14 shock wave visualized on
water’s surface

Applications (4)
New concepts:
Blended wing body
Micro-air vehicles Forward-swept wings

Applications (5)
Space: Rockets, spaceplanes, reentry,
Airship 1

Applications (6)
Non-aerospace applications: cars,
buildings, birds, insects

Categories of aerodynamics
• Aerodynamics is an all-encompassing term
• It is usually sub-divided according to the speed of the flow regime under investigation: – Subsonic aerodynamics: The flow is subsonic over
the entire body
– Transonic aerodynamics: The flow is sonic or supersonic over some parts of the body but subsonic over other parts
– Supersonic aerodynamics: The flow is supersonic over all of the body
– Hypersonic aerodynamics: The flow is faster than four times the speed of sound over all of the body

Flow type applications
• Subsonic aerodynamics: – Low speed aircraft, high-speed aircraft flying at
low speeds, wind turbines, environmental flows etc
• Transonic aerodynamics: – Aircraft flying at nearly the speed of sound,
helicopter rotor blades, turbine engine blades etc
• Supersonic aerodynamics: – Aircraft flying at supersonic speeds, turbine engine
blades etc
• Hypersonic aerodynamics: – Atmospheric re-entry vehicles, experimental
hypersonic aircraft, bullets, ballistic missiles, space launch vehicles etc

Content of this course (1)
• This course will address mostly
subsonic and supersonic aerodynamics
• Transonic aerodynamics is very difficult
and highly nonlinear
– Small perturbation linearized solutions exist
but their accuracy is debatable
• Hypersonic aerodynamics is beyond the
scope of this course

Content of this course (2)
• Subsonic aerodynamics – Incompressible aerodynamics
• Ideal flow – 2D flow
– 3D flow
• Viscous flow – Viscous-inviscid matching
– Compressibility corrections
• Supersonic aerodynamics – 2D flow
– 3D flow

Simplifications
• The different categories of aerodynamics exist because of the different amount of simplifications that can be applied to particular flows
• Air molecules always obey the same laws, irrespective of the size or speed of the object that is passing through them
• However, the way we analyze flows changes with flow regime because we apply simplifications
• Without simplifications very few useful results can be obtained

Full Navier Stokes Equations
• The most complete model we have of the flow of air is the Navier Stokes equations
• These equations are nevertheless a model: they are not the physical truth
• They represent three conservation laws: mass, momentum and energy
• They are not the physical truth because they involve a number of statistical quantities such as viscosity and density

Navier Stokes for
Aerodynamicists
t+
u( )x
+v( )y
+w( )z
= 0
u( )t
+u2( )x
+uv( )y
+uw( )z
= xx
x+
xy
y+
xz
z
v( )t
+uv( )x
+v 2( )y
+vw( )z
=xy
x+
yy
y+
yz
z
w( )t
+uw( )x
+vw( )y
+w2( )z
=xz
x+
yz
y+
zz
z
E( )t
+uE( )x
+vE( )y
+wE( )z
=q( )t
+uq( )x
+vq( )y
+wq( )z
+xu xx + v xy + w xz( ) +
yu xy + v yy + w yz( ) +
zu xz + v yz + w zz( )

Nomenclature
• The lengths x, y, z are used to define position with respect to a global frame of reference, while time is defined by t.
• u, v, w are the local airspeeds. They are functions of position and time.
• p, , are the pressure, density and viscosity of the fluid and they are functions of position and time
• E is the total energy in the flow.
• q is the external heat flux

The stress tensor • Consider a small fluid element.
• In a general flow, each face of the element experiences normal stresses and shear stresses
• The three normal and six shear stress components make up the stress tensor

More nomenclature
• The components of the stress tensor:
• The total energy E is given by:
• where e is the internal energy of the flow
and depends on the temperature and
volume.
xx = p + 2μu
x, yy = p + 2μ
v
y, zz = p + 2μ
w
z
xy = yx = μv
x+
u
y
, yz = zy = μ
w
y+
v
z
, zx = xz = μ
u
z+
w
x
E = e +1
2u2 + v 2 + w2( )

Gas properties
• Do not forget that gases are also
governed by the state equation:
• Where T is the temperature and R is
Blotzmann’s constant.
• For a calorically perfect gas: e=cvT,
where cv is the specific heat at constant
volume.
p = RT

Comments on Navier-Stokes
equations • Notice that aerodynamicists always include the
mass and energy equations in the Navier-Stokes equations
• Notice also that compressibility is always allowed for, unless specifically ignored
• This is the most complete form of the airflow equations, although turbulence has not been explicitly defined
• Explicit definition of turbulence further complicates the equations by introducing new unknowns, the Reynolds stresses.

Constant viscosity
• Under the assumption that the fluid has
constant viscosity, the momentum
equations can be written as
u( )t
+u2( )x
+uv( )y
+uw( )z
=p
x+ μ
2u
x 2+
2u
y 2+
2u
z2
v( )t
+uv( )x
+v 2( )y
+vw( )z
=p
y+ μ
2v
x 2+
2v
y 2+
2v
z2
w( )t
+uw( )x
+vw( )y
+w2( )z
=p
z+ μ
2w
x 2+
2w
y 2+
2w
z2

Compact expressions
• There are several compact expressions
for the Navier-Stokes equations:
DuiDt
=p
xi+ μ
2uixi2Tensor notation:
Vector notation: ut
+1
2u u + u( ) u
= p + μ 2u
Matrix notation: ut
+TuuT
= p + μ 2Tu

Non-dimensional form
• The momentum equations can also be
written in non-dimensional form as
• where
u( )t
+u2( )x
+uv( )y
+uw( )z
=p
x+1Re
2u
x 2+
2u
y 2+
2u
z2
v( )t
+uv( )x
+v 2( )y
+vw( )z
=p
y+1
Re
2v
x 2+
2v
y 2+
2v
z2
w( )t
+uw( )x
+vw( )y
+w2( )z
=p
z+1Re
2w
x 2+
2w
y 2+
2w
z2
= , u =u
U, v =
v
U, w =
w
U, x =
x
L, y =
y
L, z =
z
L, t =
tL
U, p =
p
U 2

Solvability of the Navier-
Stokes equations
• There exist no solutions of the complete
Navier-Stokes equations
• The equations are:
– Unsteady
– Nonlinear
– Viscous
– Compressible
• The major problem is the nonlinearity

Flow unsteadiness
• Flow unsteadiness in the real world arises from two possible phenomena:
– The solid body accelerates
– There are areas of separated flows
• This course will only consider solid bodies that do not accelerate
• Attached flows will generally be considered
• Therefore, unsteady terms will be neglected
– All time derivatives in the Navier-Stokes equations are equal to zero

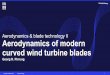
Unsteadiness Examples
Flow past a circular cylinder
visualized in a water tunnel. The
airspeed is accelerating. The flow is
always separated and unsteady. It
becomes steadier at high airspeeds
Flow past an airfoil visualized in a
water tunnel. The angle of attack is
increasing. The flow attached and
steady at low angles of attack and
vice versa.

Viscosity
• Viscosity is a property of fluids
• All fluids are viscous to different
degrees
• However, there are some aerodynamic
flow cases where viscosity can be
modeled in a simplified manner
• In those cases, all viscous terms are
neglected.

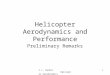
Cases where viscosity is
important
Wake
Shock wave
Boundary layer

Euler equations
• Neglecting the viscous terms, we obtain
the unsteady Euler equations:
t+
u( )x
+v( )y
+w( )z
= 0
u( )t
+u2( )x
+uv( )y
+uw( )z
=p
x
v( )t
+uv( )x
+v 2( )y
+vw( )z
=p
y
w( )t
+uw( )x
+vw( )y
+w2( )z
=p
z
E( )t
+uE( )x
+vE( )y
+wE( )z
=up( )x
vp( )y
wp( )z

Classic form of the Euler
equations
• The Euler equations are usually written
in the form:
• where
Ut+Fx+Gy+Hz= 0
U =
u
v
w
E
, F =
u
p + u2
uv
uw
u E + p( )
, G =
v
uv
p + v 2
uw
v E + p( )
, H =
w
uw
vw
p + w2
w E + p( )

Steady Euler Equations
• Neglecting unsteady terms we obtain
the steady Euler equations:
u( )
x+
v( )
y+
w( )
z= 0
u2( )x
+uv( )
y+
uw( )
z=
p
x
uv( )
x+
v 2( )y
+vw( )
z=
p
y
uw( )
x+
vw( )
y+
w2( )z
=p
z

Example 1
• Notice that in the steady Euler
equations, the energy equation has
disappeared.
• Show that neglecting unsteady and
viscous terms turns the energy equation
into an identity if the air’s internal
energy is constant in space.

Compressibility
• The compressibility of most liquids is negligible for the forces encountered in engineering applications.
• Many fluid dynamicists always write the Navier-Stokes equations in incompressible form.
• This cannot be done for gases, as they are very compressible.
• However, for low enough airspeeds, the compressibility of gases also becomes negligible.
• In this case, compressibility can be ignored.

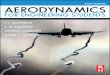
Compressibility examples
Transonic flow
over airfoil
Supersonic
flow over
sharp wedge
Hypersonic
flow over
blunt wedge

Incompressible, steady Euler
Equations • The incompressible, steady Euler
equations become
u
x+
v
y+
w
z= 0
uu
x+ v
u
y+ w
u
z=
1 p
x
uv
x+ v
v
y+ w
v
z=
1 p
y
uw
x+ v
w
y+ w
w
z=
1 p
z

Comment on the Euler
equations • The Euler equations are much more
solvable than the Navier-Stokes equations
• They are most commonly solved using numerical methods, such as finite differences
• There are very few analytical solutions of the Euler equations and they are not particularly useful
• In order to obtain analytical solutions, the equations must be simplified even further

Flow rotationality
• Rotational flow:
• Irrotational flow:
Fluid particle,
time t1
Fluid rotation
Fluid particle,
time t2
Fluid particle,
time t3
Fluid particle,
time t1
No fluid rotation
Fluid particle,
time t2
Fluid particle,
time t3

Irrotationality (1)
• Some flows can be idealized as
irrotational
• In general, attached, incompressible,
inviscid flows are also irrotational
• Irrotationality requires that the curl of
the local velocity vector vanishes:
• where u=ui+vj+wk and
u = 0
=xi +
yj+
zk

Irrotationality (2)
• This leads to the simultaneous
equations:
• Integrating the momentum equations
using these conditions leads to the well-
known Bernoulli equation
w
y
v
z= 0,
w
x
u
z= 0,
v
x
u
y= 0
1
2u2 + v 2 + w2( ) + P = constant

Example 2
• Integrate the incompressible, steady
momentum equations to obtain
Bernoulli’s equation for irrotational flow
• You can start with the 2D equations

Velocity potential
• Irrotationality allows the definition of the
velocity potential, such that
• It can be seen that all three irrotationality
conditions are satisfied by this function
• Substituting these definitions in the mass
equation leads to
u = -x
, v = -y
, w = -z
2
x 2+
2
y 2+
2
z2= 0

Laplace’s equation
• The irrotational form of the Euler equations is Laplace’s equation.
• This is an equation that has many analytical solutions.
• It is the basis of most subsonic, attached flow aerodynamic assumptions.
• The equation is linear, therefore its solutions can be superimposed
• The complete flow problem has been reduced to a single, linear partial differential equation with a single unknown, the velocity potential.

Potential flow
• Incompressible, inviscid and irrotational flow is also called potential flow because it is fully described by the velocity potential.
• The first part of this course will look at potential flow solutions:
– First in two dimensions
– Then in three dimensions
• Potential flow solutions have provided us with the most useful and trustworthy aerodynamic results we have to date.
• Their limitations must be kept in mind at all times.

Potential flow solutions
• We now have a basis for modelling the
flow over 2D or 3D bodies. All we need
to do is:
– Solve Laplace’s equation
– With two boundary conditions (2nd order
problem):
• Impermeability: Flow cannot enter or exit a
solid body
• Far field: The flow far from the body is
undisturbed.

Boundary conditions (1)
qn
qt
Impermeability:
The normal flow
velocity component must be equal to
zero.
qn = n surface
= 0
n
n: unit vector normal to the surface
qn: normal flow velocity component
qt: tangential flow velocity component
Neumann boundary condition

Boundary conditions (1bis)
(x,y,z)
i(x,y,z)
An alternative form of
the impermeability
condition states that the potential inside
the body must be a
constant:
i(x,y,z)=constant
Dirichlet boundary condition

Boundary conditions (2)
Far field: Flow far from
the body is undisturbed.
This usually is expressed as:
* 0, as r
r
r
r2=x2+y2+z2

2D Potential Flow
• Two-dimensional flows don’t exist in reality but they are a useful simplification
• Two-dimensionality implies that the body being investigated: – Has an infinite span
– Does not vary geometrically with spanwise position
• As examples, consider an infinitely long circular cylinder or an infinitely long rectangular wing

2D Potential equations
• Laplace’s equation in two dimensions is
simply
• While the irrotationality condition is
• We still need to find solutions to this
equation.
2
x 2+
2
y 2= 0
v
x
u
y= 0

Streamlines
• A streamline is a curve that is
instantaneously tangent to the velocity
vector of the flow
u
xs
x is the position vector of a point on a streamline, u is the velocity vector at that point and s is the distance on the streamline of the point from the origin

Streamline definition
• A streamline is defined mathematically
as:
• Where u has components u, v, w and x has components x, y, z.
• It can be easily seen that the definition
leads to:
dxds
= u
dx
ds= u,
dy
ds= v,
dz
ds= w, and therefore
dx
u=
dy
v=
dz
w

The stream function
• The stream function is defined at right
angles to the flow plane, i.e.
• Where u=[u v 0] and =[0 0 ]. It can
be seen that
• The stream function is only defined for
2D or axisymmetric flows.
u =
u =y
, v = -x

Properties of the stream
function
• The stream function automatically
satisfies the continuity equation.
• The stream is constant on a flow
streamline
• But, on a streamline
• Therefore
u
x+
v
y=
x y
+
y x
=
2
x y
2
x y= 0
d =xdx +
ydy = vdx + udy
dx
u=dy
v
d = udy + udy = 0

Elementary solutions
• There are several elementary solutions
of Laplace’s equation:
– The free stream: rectilinear motion of the
airflow
– The source: a singularity that creates a
radial velocity field around it
– The sink: the opposite of a source
– The doublet: a combined source and sink
– The vortex: a singularity that creates a
circular velocity field around it.

Historical perspective
• 1738: Daniel Bernoulli developed Bernoulli’s principle, which leads to Bernoulli’s equation.
• 1740: Jean le Rond d'Alembert studied inviscid, incompressible flow and formulated his paradox.
• 1755: Leonhard Euler derived the Euler equations.
• 1743: Alexis Clairaut first suggested the idea of a scalar potential.
• 1783: Pierre-Simon Laplace generalized the idea of the scalar potential and showed that all potential functions satisfy the same equation: Laplace’s equation.
• 1822: Louis Marie Henri Navier first derived the Navier-Stokes equations from a molecular standpoint.
• 1828: Augustin Louis Cauchy also derived the Navier-Stokes equations
• 1829: Siméon Denis Poisson also derived the Navier-Stokes equations
• 1843: Adhémar Jean Claude Barré de Saint-Venant derived the Navier-Stokes equations for both laminar and turbulent flow. He also was the first to realize the importance of the coefficient of viscosity.
• 1845: George Gabriel Stokes published one more derivation of the Navier-Stokes equations.