Embed Size (px)
Citation preview

Aerial Surveillance Drone Power Management
The Aerial Surveillance Drone is a quadrotor controlled by a mobile application
and a microcontroller programmed to identify and follow suspicious targets while
transmitting pictures and video taken by an onboard camera over the internet
Power and Weight Management ndash Samantha Kenyon
Colin Donahue
Samantha Kenyon
Jason Lowden
Benjamin Wheeler
January 9 2013
Aerial Surveillance Drone Power Management 2
Table of Contents I Overview 3
II Requirements Specification 3
A Marketing Requirements 3
B Engineering Specifications 3
C Analysis of Engineering Specification 3
III Risk Investigation 4
A Existing Systems 4
B Concepts Selected and Rationale 4
IV Risk Mitigation Design 6
A Overviewhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
B Quadrotor 6
C Microcontroller 6
D Camera 7
E Total 8
F Flight Timehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
G Weighthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
H Design Diagramhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
V Parts List 10
VI Testing Strategy 11
VII Uncertainties 11
VIII Appendecieshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
Aerial Surveillance Drone Power Management 3
I Overview The system needs to be able to record and send video as well as be controlled by alternative devices
This requires extra components be added The system needs to be able to power all of these
components as well as maintain flight These added components pose a risk to both the power
management of the system and the overall flight ability based on the overall weight of the system In
order for this project to be successful these problems must be solved
II Requirements Specification
A Marketing Requirements
1 Easily Portable ndash Must be able to transport easily to allow for flying in new areas
2 Low Weight - Cannot be too heavy in order to allow for easy transport
3 Low Cost - Since this system is for personal use and security it must be reasonable price for
the average person
a Enough Power to Sustain Flight - It must be able to remain in flight for a significant period of
time
B Engineering Specifications
Number Specification Associated Marketing
Requirements
1 The total weight of the system will not exceed 1 pound 1 2 5
3 The cost of the system shall not exceed $400 3
7 The system will operate on full charge for at least 8 minutes 9 11
C Analysis of Engineering Specification
Number Justification
1 The system needs to be easily portable Anything heavier than this amount could make the system hard to transport A system that is too heavy will require more powerful motors and will have reduced flight time Keeping the weight of the system low will allow it to operate longer and be more maneuverable
3 The cost must remain affordable for an average person and presently the cost of systems such as this exceeds $400
7 The system must be able to remain in flight long enough to be controlled to get to a location or to identify potential threats Many systems of this type remain in flight for 5 minutes
Aerial Surveillance Drone Power Management 4
III Risk Investigation
A Existing Systems There are two different ways that surveillance on a quadrotor system There are systems that hold
external cameras
The Draganflyer X4 has a module in which one of three styles of camera can be placed so that video and
photos can be captured during flight These cameras are self powered and self sustained In this system
the camera is completely separate from the quadrotor and this does not allow for streaming back to the
controller
Another way that this is done is using a camera that is integrated with the system
The Parrot AR Drone 20 is a quadrotor with a built in 1280 x 720 front facing camera that interfaces
back to the controller This camera is integrated into the quadrotor using some form of power from
within the device
B Concepts Selected and Rationale
The system should stream video back to the controller from a camera integrated with the device This is
similar to the second existing system The first system is too limiting for our system It allows for
recording video and then reviewing if after flight but there is no way to review the footage during the
flight
Camera
Originally the system was going to stream HD video Through research this idea was disregarded early
on There are very few options for streaming HD video with small devices and these devices are all
expensive
Aerial Surveillance Drone Power Management 5
The Hack HD 1080p camera module is one of only a few options It requires a 37V supply and has a
video out pin that can send a live feed It also records to an SD card This component has limited
availability and goes over the project budget For this reason the system will not be streaming at HD
quality
The HP web-cam deluxe will be proficient to stream video from the device to the controller
This is a chosen component because it has relatively high resolution a max of 1280 X 1024 as well as a
small current draw It is also available to us from the remnants of a previous project This can interface
with other devices through USB which is very helpful
Microcontroller
There are many available microcontroller options to choose from WiFi is being used to transmit data
therefore a microcontroller with WiFi capabilities is needed A microcontroller that is able to power the
HP web-cam through a USB port is also needed To narrow down the search I focused on what was
available to us The Gumstix Overo Fire COM can be used with this project
Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
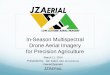
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 2
Table of Contents I Overview 3
II Requirements Specification 3
A Marketing Requirements 3
B Engineering Specifications 3
C Analysis of Engineering Specification 3
III Risk Investigation 4
A Existing Systems 4
B Concepts Selected and Rationale 4
IV Risk Mitigation Design 6
A Overviewhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
B Quadrotor 6
C Microcontroller 6
D Camera 7
E Total 8
F Flight Timehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
G Weighthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
H Design Diagramhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
V Parts List 10
VI Testing Strategy 11
VII Uncertainties 11
VIII Appendecieshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
Aerial Surveillance Drone Power Management 3
I Overview The system needs to be able to record and send video as well as be controlled by alternative devices
This requires extra components be added The system needs to be able to power all of these
components as well as maintain flight These added components pose a risk to both the power
management of the system and the overall flight ability based on the overall weight of the system In
order for this project to be successful these problems must be solved
II Requirements Specification
A Marketing Requirements
1 Easily Portable ndash Must be able to transport easily to allow for flying in new areas
2 Low Weight - Cannot be too heavy in order to allow for easy transport
3 Low Cost - Since this system is for personal use and security it must be reasonable price for
the average person
a Enough Power to Sustain Flight - It must be able to remain in flight for a significant period of
time
B Engineering Specifications
Number Specification Associated Marketing
Requirements
1 The total weight of the system will not exceed 1 pound 1 2 5
3 The cost of the system shall not exceed $400 3
7 The system will operate on full charge for at least 8 minutes 9 11
C Analysis of Engineering Specification
Number Justification
1 The system needs to be easily portable Anything heavier than this amount could make the system hard to transport A system that is too heavy will require more powerful motors and will have reduced flight time Keeping the weight of the system low will allow it to operate longer and be more maneuverable
3 The cost must remain affordable for an average person and presently the cost of systems such as this exceeds $400
7 The system must be able to remain in flight long enough to be controlled to get to a location or to identify potential threats Many systems of this type remain in flight for 5 minutes
Aerial Surveillance Drone Power Management 4
III Risk Investigation
A Existing Systems There are two different ways that surveillance on a quadrotor system There are systems that hold
external cameras
The Draganflyer X4 has a module in which one of three styles of camera can be placed so that video and
photos can be captured during flight These cameras are self powered and self sustained In this system
the camera is completely separate from the quadrotor and this does not allow for streaming back to the
controller
Another way that this is done is using a camera that is integrated with the system
The Parrot AR Drone 20 is a quadrotor with a built in 1280 x 720 front facing camera that interfaces
back to the controller This camera is integrated into the quadrotor using some form of power from
within the device
B Concepts Selected and Rationale
The system should stream video back to the controller from a camera integrated with the device This is
similar to the second existing system The first system is too limiting for our system It allows for
recording video and then reviewing if after flight but there is no way to review the footage during the
flight
Camera
Originally the system was going to stream HD video Through research this idea was disregarded early
on There are very few options for streaming HD video with small devices and these devices are all
expensive
Aerial Surveillance Drone Power Management 5
The Hack HD 1080p camera module is one of only a few options It requires a 37V supply and has a
video out pin that can send a live feed It also records to an SD card This component has limited
availability and goes over the project budget For this reason the system will not be streaming at HD
quality
The HP web-cam deluxe will be proficient to stream video from the device to the controller
This is a chosen component because it has relatively high resolution a max of 1280 X 1024 as well as a
small current draw It is also available to us from the remnants of a previous project This can interface
with other devices through USB which is very helpful
Microcontroller
There are many available microcontroller options to choose from WiFi is being used to transmit data
therefore a microcontroller with WiFi capabilities is needed A microcontroller that is able to power the
HP web-cam through a USB port is also needed To narrow down the search I focused on what was
available to us The Gumstix Overo Fire COM can be used with this project
Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 3
I Overview The system needs to be able to record and send video as well as be controlled by alternative devices
This requires extra components be added The system needs to be able to power all of these
components as well as maintain flight These added components pose a risk to both the power
management of the system and the overall flight ability based on the overall weight of the system In
order for this project to be successful these problems must be solved
II Requirements Specification
A Marketing Requirements
1 Easily Portable ndash Must be able to transport easily to allow for flying in new areas
2 Low Weight - Cannot be too heavy in order to allow for easy transport
3 Low Cost - Since this system is for personal use and security it must be reasonable price for
the average person
a Enough Power to Sustain Flight - It must be able to remain in flight for a significant period of
time
B Engineering Specifications
Number Specification Associated Marketing
Requirements
1 The total weight of the system will not exceed 1 pound 1 2 5
3 The cost of the system shall not exceed $400 3
7 The system will operate on full charge for at least 8 minutes 9 11
C Analysis of Engineering Specification
Number Justification
1 The system needs to be easily portable Anything heavier than this amount could make the system hard to transport A system that is too heavy will require more powerful motors and will have reduced flight time Keeping the weight of the system low will allow it to operate longer and be more maneuverable
3 The cost must remain affordable for an average person and presently the cost of systems such as this exceeds $400
7 The system must be able to remain in flight long enough to be controlled to get to a location or to identify potential threats Many systems of this type remain in flight for 5 minutes
Aerial Surveillance Drone Power Management 4
III Risk Investigation
A Existing Systems There are two different ways that surveillance on a quadrotor system There are systems that hold
external cameras
The Draganflyer X4 has a module in which one of three styles of camera can be placed so that video and
photos can be captured during flight These cameras are self powered and self sustained In this system
the camera is completely separate from the quadrotor and this does not allow for streaming back to the
controller
Another way that this is done is using a camera that is integrated with the system
The Parrot AR Drone 20 is a quadrotor with a built in 1280 x 720 front facing camera that interfaces
back to the controller This camera is integrated into the quadrotor using some form of power from
within the device
B Concepts Selected and Rationale
The system should stream video back to the controller from a camera integrated with the device This is
similar to the second existing system The first system is too limiting for our system It allows for
recording video and then reviewing if after flight but there is no way to review the footage during the
flight
Camera
Originally the system was going to stream HD video Through research this idea was disregarded early
on There are very few options for streaming HD video with small devices and these devices are all
expensive
Aerial Surveillance Drone Power Management 5
The Hack HD 1080p camera module is one of only a few options It requires a 37V supply and has a
video out pin that can send a live feed It also records to an SD card This component has limited
availability and goes over the project budget For this reason the system will not be streaming at HD
quality
The HP web-cam deluxe will be proficient to stream video from the device to the controller
This is a chosen component because it has relatively high resolution a max of 1280 X 1024 as well as a
small current draw It is also available to us from the remnants of a previous project This can interface
with other devices through USB which is very helpful
Microcontroller
There are many available microcontroller options to choose from WiFi is being used to transmit data
therefore a microcontroller with WiFi capabilities is needed A microcontroller that is able to power the
HP web-cam through a USB port is also needed To narrow down the search I focused on what was
available to us The Gumstix Overo Fire COM can be used with this project
Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 4
III Risk Investigation
A Existing Systems There are two different ways that surveillance on a quadrotor system There are systems that hold
external cameras
The Draganflyer X4 has a module in which one of three styles of camera can be placed so that video and
photos can be captured during flight These cameras are self powered and self sustained In this system
the camera is completely separate from the quadrotor and this does not allow for streaming back to the
controller
Another way that this is done is using a camera that is integrated with the system
The Parrot AR Drone 20 is a quadrotor with a built in 1280 x 720 front facing camera that interfaces
back to the controller This camera is integrated into the quadrotor using some form of power from
within the device
B Concepts Selected and Rationale
The system should stream video back to the controller from a camera integrated with the device This is
similar to the second existing system The first system is too limiting for our system It allows for
recording video and then reviewing if after flight but there is no way to review the footage during the
flight
Camera
Originally the system was going to stream HD video Through research this idea was disregarded early
on There are very few options for streaming HD video with small devices and these devices are all
expensive
Aerial Surveillance Drone Power Management 5
The Hack HD 1080p camera module is one of only a few options It requires a 37V supply and has a
video out pin that can send a live feed It also records to an SD card This component has limited
availability and goes over the project budget For this reason the system will not be streaming at HD
quality
The HP web-cam deluxe will be proficient to stream video from the device to the controller
This is a chosen component because it has relatively high resolution a max of 1280 X 1024 as well as a
small current draw It is also available to us from the remnants of a previous project This can interface
with other devices through USB which is very helpful
Microcontroller
There are many available microcontroller options to choose from WiFi is being used to transmit data
therefore a microcontroller with WiFi capabilities is needed A microcontroller that is able to power the
HP web-cam through a USB port is also needed To narrow down the search I focused on what was
available to us The Gumstix Overo Fire COM can be used with this project
Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 5
The Hack HD 1080p camera module is one of only a few options It requires a 37V supply and has a
video out pin that can send a live feed It also records to an SD card This component has limited
availability and goes over the project budget For this reason the system will not be streaming at HD
quality
The HP web-cam deluxe will be proficient to stream video from the device to the controller
This is a chosen component because it has relatively high resolution a max of 1280 X 1024 as well as a
small current draw It is also available to us from the remnants of a previous project This can interface
with other devices through USB which is very helpful
Microcontroller
There are many available microcontroller options to choose from WiFi is being used to transmit data
therefore a microcontroller with WiFi capabilities is needed A microcontroller that is able to power the
HP web-cam through a USB port is also needed To narrow down the search I focused on what was
available to us The Gumstix Overo Fire COM can be used with this project
Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 6
This microcontroller is available to us also from a previous project and it has everything needed for the
system It has both Bluetooth and WiFi capabilities so it has flexibility in regards to communication It
also has a camera connector and USB This Gumstix also comes with an IO board that can be used to
interface with other devices The Pinto-TH expansion board has 6 analog-to-digital converts along with
6 pulse width modulators and 8 GPIO lines These all provide flexibility to use the microcontroller to
control the quadrotor if needed Since this microcontroller has everything needed and is available free
of charge there is no need to look any further This is the best available option
IV Risk Mitigation Design
A Overview
Power consumption is extremely important part of the design The following design calculations show
that all of these components can be used together and use the battery supplied by the quadrotor The
consumption of each component must be analyzed to show this
B Quadrotor
The quadrotor itself has a stock battery with the following specifications
Amp Hours Discharge Rating
500 mAh 12C
This battery needs to power the four motors of the quadrotor as well as the other components within
the quadrotor The following table shows the current draw of the quadrotor with no load
Average Current Draw Max Current Draw
27 A 37 A
The stock batter on the quad rotor has a voltage of 37V This results in a power consumption shown
below
Average Power Consumption Max Power Consumption
999 W 1369 W
C Microcontroller
The Gumstix microcontroller can at its peak of performance use 700 mA of current The microcontroller
will definitely be used for WiFi transmission and the CPU will also be used It is difficult to find precise
measurements of the current draw for these values however it can be approximated
Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 7
Component Approximate Current Draw
CPU 250- 400 mA
WiFi (Max) 275 mA
Total (Max) 675 mA
This microcontroller needs an input voltage of at least 27V but a max of 45V This results in the
following overall power consumption
Minimum Power Consumption Maximum Power Consumption
18225 W 303765 W
D Camera
The power consumption of the camera depends on the resolution of the camera at any given time On
average the camera draws somewhere between 100 and 120 mA while active The relationship between
current and resolution is shown below
Resolution Approximate Current Draw
320 x 240 110 mA
640 x 480 103 ndash 117 mA
1280 x 1024 120 mA
The camera needs to be powered with 5V
Resolution Approximate Power Consumption
320 x 240 055 W
640 x 480 0515 ndash 0585 W
1280 x 1024 06 W
Since the battery provided with the quadrotor is only 37V another battery will be needed It is easiest to
just add another battery of the same type to the quadrotor and connect it in series with the previous
value This will retain the capacity of the original battery but double the voltage to 74V which is enough
to power the camera The batteries should be connected as shown below
Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 8
E Total
All of the individual components need to be powered at their maximum current draw
Component Approximate Max Current Draw
Helicopter 37 A
Gumstix 675 mA
Camera 120 mA
Total 4495 A
All of the individual components and their maximum power consumption
Component Max Power Consumption
Quadrotor 1369 W
Microcontroller 303765 W
Camera 06 W
Total (max) 1732765 W
F Flight Time
The system should be able to maintain flight for 8 minutes The battery used to power the quad rotor
should be enough to power all of the components based on these power calculations The challenge
now is determining for how long this battery can provide them all power Using the following equation
this time can be determined
Current Draw (A) Flight Time (min)
27 1111
37 8108
4495 6674
Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 9
This table shows that on average the quad rotor without any of these components can be powered for
around 11 minutes At the maximum current draw it can remain powered for 8 minutes Finally with all
of the components added to it the system can remain powered with that battery for a minimum of 6
minutes This is with the maximum current being drawn from the components This allows for some
variation in that number and the assumption that on average the flight time will be larger than 6
minutes but less than 8 minutes This shows however that it is possible to do this with an acceptable
flight time although it may be necessary to adjust the engineering specifications to match this outcome
G Weight
Weight is an important factor when working with systems that fly The system can only withstand a
certain payload value before it is unable to maintain or even reach any altitude When adding
components onto the system this is something that must be considered Each of the components
chosen is very low in weight
Component Weight (g)
Gumstix 11 g
Camera 10 g
Battery (Extra) 20 g
Total (payload) 41 g
Since the camera is already stripped down from its original form it is extremely low weight The board
portion itself weighs only 4 g where as the USB cable weighs 6 grams The Gumstix microcontroller also
is very low in weight The total of these two components is 21 grams The extra battery adds another 20
grams to the payload This means that the quadrotor needs to be able to fly with an extra 41 grams
attached to it Based on the testing done so far this is possible The system has successfully carried a
load of 598 grams therefore 41 grams should be possible
H Overall Design Diagram
The extra battery now requires that there is a voltage regulator before both the microcontroller and the
camera to ensure that the correct amount of voltage is applied to both devices The following diagram
shows the components connected together for power Voltage regulator 1 is a 33V voltage regulator
that can take a voltage value below 15V and produce an output voltage of 33V perfect for the
microcontroller Voltage regulator 2 would be a 5V voltage regulator that can take a voltage in the range
of 7 ndash 35 V and produce a 5V output which is perfect for the camera These regulators are very small ad
have no effect on weight
Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 10
The microcontroller will be placed underneath the quadrotor next to the batter and will then be
connected to the battery The camera will then be connected to the microcontroller and placed
underneath that facing down as shown below
There are no existing patents for this design
V Parts List
Component Description Cost Our Cost
Availability
Gumstix Overo Fire COM Microcontroller $19999 $0 Helicopter Project
HP 80 MP Deluxe Webcam $2495 $0 Helicopter Project
Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 11
500mAh 1-Cell 37V 12C LiPo 120SR Elite Battery
$849 $849 Available ndash delivery in 1 week
5V Voltage Regulator microA7805C $125 $125 Available - delivery in 1 week
33V Voltage Regulator LD111733 $125 $195 Available - delivery in 1 week
Total Cost $26363 $1169
VI Testing Strategy
To further test power consumption it is necessary to connect all of the components and actually
measure current draw and total power The numbers given here are just estimates based on data sheets
and expertise from others who have used these components before They are not measured values
with the exception of the current draw of the quadrotor with no load These values need to be
measured once they are connected together to ensure that they remain within these ranges The
current draw of each component while they are all running in their maximum stage needs to be
measured All of these components are available so this test should occur within the next 2 weeks by
12313
Also the quad rotor needs to be tested with different weights As flying the quadrotor becomes easier
the flight time can be tested Currently only tested its ability to fly with a given payload has been tested
not the duration of that flight It is necessary to add weight and fly the quadrotor for as long as possible
and record that time This test should be done within 1 week by 11613
VII Uncertainties
The uncertainty that I have now is the flight time I found that at maximum load the system can only
power all of the components for 6 minutes This is less than our desired 8 but something I believe is still
acceptable for the project however this was assuming the quadrotor draws the same amount of current
with no load as it would with the load This is an incorrect assumption The load will affect the current
draw of the quadrotor because it will need more power to carry more weight Therefore it can be
assumed that with the load the flight time will be less than 6 minutes How much less it will be is
something that needs to be tested and determined If it cannot sustain flight for at least 5 minutes our
implementation will need to be reconsidered
Another uncertainty is the addition of sensors We have not yet discussed this much as a group
however additional sensors will be needed for other portions of the project These sensors will need to
be powered and will also require a higher payload for the system I do believe that the numbers shown
Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119

Aerial Surveillance Drone Power Management 12
here should allow for additional sensors to be powered with the battery but the flight time will be
affected
VIII Appendices
Parrot AR Drone 20
httpwwwbrookstonecomparrot-ar-drone-2-
quadricopterbkiid=SubCategory_Games___Toys_Electronic_Toys_Remote_Control_Toys|SubCat
egoryWidget|786406pampcatId=
Draganflyer X4
httpwwwdraganflycomuav-helicopterdraganflyer-x4
Sparkfun Hack HD 1080p Camera Module
httpswwwsparkfuncomproducts11418
Gumstix Overo Fire COM Microcontroller
httpswwwgumstixcomstoreproduct_infophpproducts_id=227
HP 80 MP Deluxe Webcam
httpreviewscnetcomwebcamshp-8-0-mp4507-6502_7-33311003html
Overall Reference for Gumstix and Webcam
httpwwwceriteduresearchprojects2010_fallAutonomous_Surveillance_Helicopterdocu
mentationdocumentationhtml
Sparkfun 5V Voltage Regulator microA7805C
httpswwwsparkfuncomdatasheetsComponentsLM7805pdf
Sparkfun 33V Voltage Regulator LD111733
httpswwwsparkfuncomdatasheetsComponentsLD1117V33pdf
Newegg 500mAh 1-Cell 37V 12C LiPo 120SR Battery
httpwwwneweggcomProductProductaspxItem=01Z-003H-00119