Embed Size (px)
Citation preview

School of Chemical Engineering Research Projects
1 © Mark J. Biggs ([email protected])
Advice on Research Proposal Introduction One of the main purposes of a research proposal is to convince the reader – who may be your boss or an independent expert – to provide resources (time, manpower, money) for your research. You do this by outlining at the very least the following in a succinct way: (a) a compelling rational for the intended research, (b) the research question(s) to be answered, and (c) how the questions are to be answered; you may also need to provide additional information such as, for example, how you plan to disseminate or exploit the outcomes of the work. I provide here some advice on how you may write a proposal that meets these requirements. You should use this advice in conjunction with that provided by your supervisor, which should take precedence over that offered here. The advice has also been offered here in a way that is hopefully useful beyond this course. You may also wish to consult the various online-resources I indicate at the end of this document (the links are also provided in MyUni), and some example proposals of my own that may be found in the appendices to this document.
Title The title should communicate in clear, concise and simple language the aim of the proposal or, to put it another way, the problem to be solved. It can include the means of addressing the problem but it should not be too detailed or specific (e.g. you could indicate an experimental approach is to be taken but you would normally not mention the specific methods to be used unless these were at the core of the project’s novelty). The title should engage the attention of the reader – a catchy title that is not too superficial or glib is good. It should be understandable by a non-expert in the proposed field of research and, in some cases (e.g. if you wish to engage the public), it should even be accessible to those who do not have a technical background. The title should be stated at the head of the first page and should be kept to one line if possible (and most certainly no more than two). A shorter ‘running’ version of the title can also be placed in the header of subsequent pages.
Summary A concise summary of the project should be provided in no more than about 200 words. It should include the main compelling rational for the work, its aim, the methodology, the expected outcomes, and their significance. The main elements of the methodology should be provided.
Main Body of Proposal The length of proposals can vary considerably – for example, the Australian Research Council (ARC) limits proposals to 10 pages at most whilst those for PhD projects tend to be somewhat longer. However, in all cases, the proposal should only be as long as it is necessary to fulfil its purpose (see above). In this course, somewhere between 5 and 10 normal A4 pages (2 cm wide margins all-round and 12 point Times New Roman or similar text) should be sufficient. I would also suggest that the number of figures should not exceed around 3 to 6 for this number of pages.
As with the length, the structure of a proposal can vary considerably depending on the scheme. However, each proposal should as a minimum include the following sections in the order indicated (an estimate of the space that should be given to each section for this course is indicated in the parenthesis, although be aware that these in general should be influenced by the weighting given to these by the funding body):
1. Background (1/2 page)
The key to a good proposal is to convince the reader within the first half page that the problem you intend to address is an important one and, therefore, that they should give the rest of the proposal

School of Chemical Engineering Research Projects
2 © Mark J. Biggs ([email protected])
the time it deserves. You should do this by providing in as simple language as possible what is the problem and its significance – and this should be as compelling – and how you intend to address it.
2. Aim and Objectives (1/3 page on the first page) The aim (sometimes termed overall or over-arching objective) – of which there should be only one in general – and the objectives should follow and flow from the Background. The objectives – of which I would recommend no more than 4 to 6 – should reflect the major steps that need to be taken in order to deliver on the aim.
3. Literature Review (2-3 pages) You should critically review the published literature relevant to the research question. The review should:
• demonstrate that you are familiar with the primary work in the field; • demonstrate that you can integrate and synthesize this literature succinctly; • provide support for the claim that a problem is being tackled that remains to be addressed; and • provide support for the proposed solution to the problem.
It may also be useful to provide further context and support for the significance of the proposed work as done in the Background. If you do this, do not simply repeat what has been said in the Background. Instead, you could provide, for example, further examples and support for the work.
The literature review should primarily focus on the peer reviewed literature found in journals and academic monographs. The conference literature can also be used but it should not dominant the review under normal circumstances (an exception is where the field’s main method of dissemination is conferences as in, for example, computer science). It may also be appropriate to review the patent literature, particularly if the project is at the technology development/transfer end of the R&D spectrum. The review should be up to date – if you review is dominated by dated literature, then you are either looking at a ‘long lost problem’ or the review is inadequate. You should be sure to cite the main players in the field, primarily because their work will be highly relevant but also, perhaps rather cynically, because they may end up reviewing the proposal!
The review should be a logical, integrated synthesis of the relevant literature. Repetition should be avoided. It should be focused (i.e. you should not consider material that is not central to the proposed research other than, for example, to explain why you are not considering it). You will invariably find that the literature can be presented in a number of logical ways – the most appropriate will become more obvious as you become more familiar with the literature and write the review (you will almost invariably find that you need to write the review in an iterative manner). You should use sub-headings to help you organise the review.
4. Approach and Methodology (2-3 pages) If a wholly new approach or method is to be developed, this should be outlined along with justification for it. The Literature Review should support this. Once the new approach or method has been outlined, it is best to present the approach to be taken in terms of work packages that relate to the objectives; each should be dealt with in its own sub-section and directly connected to the relevant objective(s). Once again, the Literature Review should support this.
Many research efforts involve a team, even if it is a team of two – the supervisor and the student. It is, therefore, in general good to identify what part each team member will play in the work. For single-student projects, this is straightforward. For multi-student projects, you should clearly identify the roles of all students involved. The role of the supervisor is typically to provide

School of Chemical Engineering Research Projects
3 © Mark J. Biggs ([email protected])
intellectual direction (although you are encouraged to contribute to this or even to be take the lead in this regard) and advice, and to manage the project (although this role will fall to you in this course). The roles should connect with the Resources section (see below).
5. Novelty (1/3-1/2 page) In general, only truly novel research should receive resources. It is, therefore, useful to include a section outlining where the novelty lies in the proposed work. Novelty can come in various forms – for a proposal in general, this can manifest as a novel approach or method to be developed, the novel application of methods (e.g. applying an existing method in a new way/context), or novel outcomes (e.g. new model; new theory; new discovery). There may be several aspects of novelty of varying significance. You should try to present these in order of significance. Once again, these claims should be supported by the Literature Review.
In the case of a final year research project, it is likely that there will be limited novelty in the general sense. Despite this, you should endeavour to indicate how the work relates to the state-of-the-art. You should also articulate how the work differs from anything you have met to date in your studies (i.e. how it is novel from your personal perspective).
6. Significance (1/3-1/2 page) Even if the proposed work is novel, the mandate for it to be funded is greatly strengthened if it is significant. The significance of something is context specific – finding the ‘God particle’ is significant, but not particularly to a company that makes its living by processing waste! You should articulate the significance from the perspective of the body/person you are seeking funding from. In your case, you are free to choose who this may be.
7. Dissemination and Exploitation (1/4-1/3 page) Dissemination of the research outcomes is critical to the research and development process. It is, therefore, essential that you articulate how this is to be done. It is common here to state that the work will be published in journals and conferences with specific details such as the journal or conference names. It is also increasingly common to disseminate material via the WWW. In your case, the main mode of dissemination will be poster and dissertation and, as such, this section may not need to be included (as this will be taken for granted). However, if you and/or your supervisor feel there is some scope for publishing the work – and this is not unheard of for final year research projects – then you may wish to state that along with support for why this is the case (the Literature review should support your claims) and details of where the work will be submitted to.
There may also be opportunities to exploit the outcomes of the research. For example, the outcomes may possible be suitable for subsequent commercialisation. Alternatively, you may have a clear view of how you plan to take the results forward to the next stage – detailing this can sometimes help to ‘sell’ the importance of the work (e.g. you may outline how the improved understanding of protein adsorption on chromatography media that you will derive from the current project will be exploited by you in a future project to develop the next generation of more effective downstream processing kit).
8. Timeline, Milestones, Outcomes and Deliverables (1/4-1 page – depends on what form of timeline is used) A timeline showing the timing of the major tasks within the work packages and their inter-relationship should be shown graphically. There are sophisticated means of doing this such as a

School of Chemical Engineering Research Projects
4 © Mark J. Biggs ([email protected])
Gantt chart, although this level of sophistication is not that unnecessary for this course (in fact, I have at best used an Excel spreadsheet to construct my more complex timelines and a simple Word table is sufficient for simple timelines). It is also useful to show on the timeline major milestones (e.g. apparatus built; experiments complete) and deliverables (e.g. data set; publications).
In addition to deliverables (which tend to be tangibles), it is useful to also identify major outcomes, which need not be tangibles. Examples of outcomes include improved knowledge about X, improved capacity to design Y, etc.
9. Resources (1/4-1/2 page – depends on the magnitude of the resources being requested) If resources are to be requested to undertake the research, these should be detailed and justified. It is recommended that this be done by considering the main groups of resources: personnel; equipment; consumables, maintenance and services (e.g. testing by an external company), and travel. You should refer to the previous sections (particularly Approach and Methodology and the Timeline) when justifying the requested resources. In your case, the requirements are likely to be very modest and likely already provided for you but you should include this section for practise).
10. Management (1/4-1/3 page) For more complex projects (e.g. involving multiple groups, especially if they are distributed geographically), it is necessary to outline how the work will be managed. The overall manager and managers of the various work packages and what arrangements will be put in place to ensure the work moves forward in concert as intended (e.g. meeting details) should be identified. Although this section is probably not particularly necessary for your project, you should outline your plans for meeting with your supervisor(s) to ensure timely progress of your work.
Further reading
I have found the following online-resources useful in constructing this advice paper (links are also provided via MyUni):
1. Wong PTP, How to Write a Research Proposal, accessed 25 June 2011.
2. Bineham G, Writing a Research Proposal/Protocol, accessed 28 June 2011.
3. Anonymous, Writing a Research Proposal, accessed 28 June 2011.

School of Chemical Engineering Research Projects
5 © Mark J. Biggs ([email protected])
Appendix – Example Proposals
I include in the following pages by way of example some of my own proposals. Note that the formats of these proposals, which all obviously differ, were dictated by the funding schemes to which they were submitted. I should also perhaps add that whilst I believe they are not bad proposals, they are also not necessarily perfect and may in places not conform to the advice given above! You should use them as a guide only. Finally, these proposals were all written for highly competitive national funding schemes – they are, therefore, perhaps more advanced than what we are looking for from you. However, hopefully they will make clearer the advice given above and, who knows, be of assistance in years to come once you graduate.
I provide here a brief background just in case this is of help:
1. High-performance Particle Separation by Vibrated Liquid Fluidised Beds This proposal was submitted to and ultimately funded by the Engineering and Physical Sciences Research Council (EPSRC) of the UK. The EPSRC stipulates that the proposal must be described in no more than 6 pages + 1 page for the timeline, which you can see is quite detailed compared to some others provided here. I include the Excel spreadsheet in MyUni in case you wish to use it as a template.
2. Prediction of Dynamics of Proteins on Solid Surfaces over Macroscopic Timescales This proposal was submitted to and ultimately funded by the Royal Academy of Engineering (as a fellowship for myself) of the UK. The proposal was in this case limited to 3 pages, although further space was allowed to provide other details that are not relevant here. This is an example of what a shorter proposal may look like.
3. Towards the Rational de novo Design of Peptides for Self Assembly of Complex Nanostructured Systems
This was submitted to the Australian Research Council (ARC), although ultimately was not funded. The ARC stipulates that the proposal should be no longer than 10 pages in length (it has gone slightly over 10 pages in this abridged version of the fuller document) and requires very specific sections to be included in the order indicated. Some sections carry specific weights as well and, hence, demand greater space.
4. Improved models of nanoporous carbons for greater fundamental insight and better sustainable technology This was also submitted to the ARC and ultimately funded (it is currently underway).
5. A Technology for Concentrating Ventilation Air Methane for Power Use
This was submitted to an industry-sponsored funding scheme where the focus is much more on technology development. It was, unfortunately, not funded despite being highly rated. Once again, they were quite prescriptive on the length and structure of the proposal.

1
High-performance particle separation by vibrated liquid fluidised beds
1. Background The need for particle classification and the challenges faced by established methods
The need to separate particles on the basis of their differences, termed particle classification or fractionation, is wide-spread. Just a few examples of relevance here are separation of cells and cell debris in bioprocesses (e.g. blood processing and drug manufacture), biomedical diagnostics and therapies (e.g. separation of diseased and healthy cells), the beneficiation of minerals, and the separation of plastics for recycling.
A wide range of classification methods are used across industry and beyond [1], which can be grouped on the basis of the mechanisms involved: size exclusion via screening and sieving, flotation methods that exploit differences in particle surface character, and methods that separate through field-induced migration velocity differences [2]. Improved performance can be achieved by hybridizing these methods; examples include field-flow fractionation [3] and density-gradient centrifugation [4].
All the classification techniques have niches dictated by their pros and cons. It is not necessary to note all these here but, rather, to indicate that all are challenged when the following hold: particle size and density ratios approach one, particles that tend to aggregate, and high solids loadings. Field-flow fractionation, for example, is well suited to the first of these situations but not the others. Screening, sedimentation and centrifugation can be used for dense systems, although performance is quite variable, but they are less discriminating. Chemicals can be added when the particles tend to aggregate, but this is not always possible (e.g. many foods and biosystems) or desirable such as when emissions are of concern (e.g. water treatment where it is discharged into the environment). Segregation in liquid FBs vs. segregation in vibro-FBs: The basis for a new hybrid classification method
Provided mixing is not significant, the interplay between buoyancy and drag leads to segregation in liquid fluidised beds (FBs) [5]. In the case where particles are of the same density but different size (or vice-versa), the larger (heavier) particles tend to move towards the bottom displacing the smaller (lighter) particles towards the top. Behaviour is more interesting when the larger particles are less dense – the smaller particles reside at the bottom at low superficial velocities but move to the top at higher velocities in what is termed solid layer inversion. These behaviours and the suitability of liquid FBs for dense systems means they have been used for classification [6].
The mechanisms and phenomena associated with segregation in vibro-FBs are very different [7]. Larger particles irrespective of their density always rise by a geometry-driven process when the vibrations are small. Behaviour is more complex at higher amplitudes. Larger particles always tend to rise irrespective of their density in the absence of interstitial fluid, with their final depth being determined by the buoyancy-drag balance, where these terms are used in the sense of the larger particles in a ‘fluid’ of smaller particles. In the presence of interstitial air, lighter larger particles sink due to air circulation driven by the large amplitude particle motion. Large amplitude motion can also cause significant particle circulation depending on bed geometry and other factors, which in turn can induce larger particles to rise or fall. These diverse range of driving forces are exploited in shaking tables and jigging [1a].
Experimental work by one of us in the dead-end filtration context [8] indicates that particle segregation occurs in a vibrating liquid FB. By adjusting the wider range of process parameters available to this hybrid method, the various different mechanisms outlined above could be made to complement or compete against each other to yield much greater control and flexibility than either form of FB alone†. As with other hybrid methods, it is anticipated that this greater control will facilitate classification of particles whose size and density ratios are close to unity. This previous work also indicates that the proposed method would be most suitable for particles that tend to aggregate. These features and the ability to handle dense systems would make vibrated liquid FB classification unique and an extremely useful method provided the necessary understanding and design tools can be developed – we propose here to address these two needs.
2. Details of programme and methodology 2.1. Aims and objectives
The aims are to establish the operating envelope of a vibrating liquid FB-based particle classification process and to develop appropriate validated models that will facilitate the optimisation of this process for similar systems. The objectives are, therefore, to: (1) Undertake experiments to determine: (a) the variation of segregation with process parameters for a number
of representative particle systems, and (b) detailed behaviour of the process for these systems at key operating points for the purpose of model validation.
(2) Develop validated models of the process that will be capable of predicting its performance and detailed behaviour and, therefore, be usable as process design and optimisation tools.
† Support for this assertion can be found in the other hybrid methods that exploit counterbalancing of forces to gain greater control (see above), as well as molecular and colloidal self-assembly, which are achieved by balancing competing forces.

2
2.2. Overview of experimental component Outline of benchscale prototype classification system
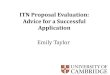
The apparatus, see Figure right, will consist of an approx. 20 kg liquid fluidised bed 0.3 m wide by 0.75 m high by 15 mm thick liquid mounted on an electromagnetically actuated shaker capable of delivering vertical motion of up to 25 mm under loads of up to 3 kN. The shaker will be driven by a computer-controlled signal generator using feedback from an accelerometer attached to the bed. The bed shall be constructed from toughened glass so as to avoid the need to determine any extra restitution and friction coefficients for the models, and to provide the optimal conditions for the DWS experiments (see below). Suitably sealed pressure ports will be drilled in the wall and side of the bed to allow the pressure field to be measured. The distributor will be constructed from sintered material to achieve maximum possible homogeneity of fluidization. The liquid flow rate will be controlled by a control valve using feedback from an electronic flow meter. All data will be PC logged. Particle systems to be considered
The particle pairs to be considered are given in the adjacent table; nine criteria were used in their selection [9]. It is known that segregation behaviour in both liquid and vibro-fluidised beds is a function of the relative fraction of each particle [5, 7]. It is important to understand how great this dependence is, as the particle fractions are likely to fluctuate in real applications. A range of fractions will, therefore, be considered including 5/95, 30/70 and 50/50; other systems maybe considered if appropriate. Determination of operating envelope of benchscale prototype system
The degree of segregation versus time characteristics of all the particle systems will be established as a function of the superficial velocity, vibration frequency and amplitude, ‘phase diagrams’ will be constructed, and the optimal classification conditions will be identified. The variation of segregation with time will be determined by the quantitative analysis of colour images captured by a digital video camera as described in Goldschmidt et al. [13]. Detailed characterisation of porosity, concentration, pressure, particle velocity and granular temperature fields
In order to validate in detail the models described below, the porosity, concentration, pressure, velocity and granular temperature (GT) fields shall be determined for the particle pairs for the 5/95, 30/70 and 50/50 systems at points of optimal and weak segregation where mixing is not dominant and dominant respectively (i.e. 24 separate experiments) – this range of systems will cover all the combinations of driving forces and phenomena. Cheap intrusive methods are available for some of these properties, but they are invariably laborious and can be subject to large experimental errors due to their intrusive nature. We, therefore, propose to use non-intrusive methods.
The porosity, concentration and particle velocity fields for each particle class will be determined using the positron emission particle tracking (PEPT) facilities at Birmingham [14]. It would be preferable to determine these fields for both particle classes in a single experiment. A suitable algorithm has been proposed very recently for this [15], but it has not been well tested. Given this, and the fact that the method for measuring the granular temperature can only consider one particle class at a time, it is proposed that the fields for each particle class be determined in separate experiments at the same conditions.
Whilst GT can also be determined using PEPT, it is restricted to low solids loadings [16] that do not prevail here. We will, therefore, determine it using the high resolution (1 nm, 10 ns) diffusing wave spectroscopy (DWS) method [17], which is ideal for dense systems. The GT of each particle class may very well be different [16] and it is, therefore, necessary to measure the field for each. These fields cannot be measured simultaneously. We, therefore, propose to measure the GT field of each particle class separately by matching the refractive index of the other particle class using NaI [18] so as to make it invisible to DWS (care will be taken to exclude air); the difference in the necessary NaI concentrations are small, making the density and viscosity differences small. The particle velocity and GT fields for a particle will be determined together by using PEPT and DWS in parallel.
The pressure field will be determined using high resolution pressure sensors connected to tapings in the bed wall. The pressures will be recorded at a high rate to enable detection of pressure fluctuations.
d1 (mm)
d2 (mm)
ρ1 (kg/m3)
ρ2 (kg/m3) d1 / d2 ρ1 / ρ2
1.4 1.0 2460 2460 1.4 1.0
1.0 1.0 2950 2460 1.0 1.2
1.4 1.0 2460 2950 1.4 0.83
1.4 1.0 2950 2460 1.4 1.2
Basic vibrated liquid FB rig (A is the accelerometer). Additional apparatus to be used in this programme but not shown here are the camera [15], PEPT [16] and DWS [19]; the reader is referred to the indicated references for greater details of these techniques in general, the main text for their role here and the Resources section for details of the DWS apparatus.
FB
Freeboard
Shaker
Reservoirtank
Headertank
Pump
Deaerator
Poweramplifier
Controller(incl. signalprocessor,analyzer
generator)
A
Pressure tapping points
Basic vibrated liquid FB rig (A is the accelerometer). Additional apparatus to be used in this programme but not shown here are the camera [15], PEPT [16] and DWS [19]; the reader is referred to the indicated references for greater details of these techniques in general, the main text for their role here and the Resources section for details of the DWS apparatus.
FB
Freeboard
Shaker
Reservoirtank
Headertank
Pump
Deaerator
Poweramplifier
Controller(incl. signalprocessor,analyzer
generator)
A
Pressure tapping points

3
2.3. Overview of modelling component The development of any efficient classification processes requires an ability to predict its behaviour. This is
especially important for the process proposed here as it depends on exploiting the interplay between the already complex segregation processes in liquid and vibro-FBs that are known to be affected by many factors, some of which have been isolated out of this study to maintain a reasonable scope [19]. Models for many of the commonly used classification methods are relatively straightforward as they involve simple flow patterns and low solids fractions. Clearly neither of these conditions apply here and we must, therefore, resort to more complex models. There are three approaches that may potentially be used: (1) the multifluid (MF) approach [20] where the fluid and particles are treated as interpenetrating continua each
modelled by a set of Navier-Stokes equations; (2) the Eularian-Lagrangian (EL) approach [21] where the particles are instead modelled as moving points of
finite size that interact with the fluid and each other via mean-field exchange terms; and (3) the explicit numerical simulation (ENS) approach [24], where the surfaces of the moving particles define the
fluid domain, removing the need for any mean-field treatment, at least down to length scales of the order of the mesh sized used to resolve the fluid flow. It is proposed to develop two models – a computationally inexpensive model for scoping analysis and a more
complex model that allows detailed analysis of potential designs identified from a scoping study. As only the MF approach is open to analytical or semi-analytical solution, it will form the basis of the scoping model. We have greater choice for the detailed analysis model. Whilst computational expense prevents the ENS approach being used in this role for the foreseeable future, comparisons of results from multidimensional variants of the MF and EL models with experiment indicate either of these may be appropriate. Comparison on other grounds [22], however, clearly indicates the latter is best and shall, therefore, be used here for the detailed analysis model. Scoping model
It is proposed to develop a validated semi-analytical one-dimensional MF model for a vibrated liquid fluidised bidisperse bed. The model shall be based on that of Gundogdu et al. [8], which was developed for monodisperse systems in the context of vibration-assisted dead-end filtration. This model employs the granular temperature diffusion model of McTigue and Jenkins [30] with an added Darcian drag term to accommodate the mean flow, as well as a gravitational term to deal with non-neutrally buoyant particles. The slurry is regarded as a dense gas in which the particles interact predominantly through the fluid, although a particle pressure term is also introduced that is physically motivated by the fact that real particles are never smooth (see [31] for a discussion).
Extension of the model of Gundogdu et al. will involve the need to impose boundary conditions relevant to a vibrated liquid fluidised bed and the incorporation of bidispersity, which will be a significant and challenging task in its own right. The latter will be achieved using the ideas of Jenkins and Yoon [29], who have developed a model for vibrated dry bidisperse systems in which both particles classes have the same granular temperature (i.e. equipartition). This aspect of the work will require incorporation of the many effects that arise from the presence of the interstitial fluid (e.g. added mass, film flow between particles, etc.) as well as the removal of the equipartition assumption, as recent experimental work suggests this may not be valid.
MF models are characterised by a good number of non-trivial constitutive parameters that must be determined. The traditional approach is to use experiment, but this has several downsides including cost, the need to have the expertise and experimental facilities, and the inability to consider systems that do not yet exist (e.g. de novo design) or which are inaccessible (e.g. hazardous systems). We propose, instead, to adopt a multiscale approach where ENS and EL models are used at the fine scale (i.e. particles are treated on a 1-for-1 basis) to determine these parameters for simple vibrated liquid-solid systems.
The scoping model approach (i.e. the model itself and its interaction with the other models) will be validated by comparing predictions for the porosity, concentration, velocity, pressure and granular temperature fields with the experimental data determined as part of this programme. Lack of correspondence between model and experiment, which is expected in the first instance, will trigger a process in which the more detailed models will be used to ascertain potential reasons for failure and suggest possible remedies that will be implemented and tested – this process will continue until there is satisfactory correspondence between the model and experiment (see [12b] where such a process worked well in the monodisperse gas FB context). Detailed analysis model
It is proposed to develop a validated three-dimensional EL model for a vibrated liquid fluidised bidisperse bed. The EL model of Fan and co-workers for 3-phase fluidised beds [25] will be used here as the start point for modelling of the experimental systems (the gas phase will be omitted of course). Whilst this model includes many important features of liquid-solid systems (interphase drag, added mass, Basset force, liquid drainage between approaching particles), several simplifying assumptions are made including the absence of particle rotation and

4
binary collisions, and some sub-models are somewhat simple (e.g. interphase drag) – these and other shortcomings will be addressed if comparison with experiment shows them to be significant (see below).
Following self consistency checks [26], the model will be validated against experiment; note that the experimental system has been selected so that the particles in it can be modelled on a 1-for-1 basis, making this validation process viable. Comparison will be made with the experimentally determined porosity, concentration, pressure, velocity and granular temperature fields and particle mean square displacements. If there is a mismatch between simulation and experiment, we will address potential model deficiencies until a match is obtained; these include the assumptions made by Fan and co-workers as well as more deeply rooted deficiencies such as the drag and particle collision models, in which case ENS [24] will be used to identify better models, collision parameters, which are known to be sensitive to surface imperfections and contaminants and size of impacting objects (see ref. [27] and refs. therein) and the fluid model (e.g. turbulence [28]). Once the code is validated, its robustness will be assessed by comparing it with the experimentally determined segregation behaviour of the remaining particle systems; reasons for any inconsistencies will be sought.
2.4. Timeliness and novelty The need for particle classification is always evolving. Areas of increasing importance in the biomedical
field at this point in time are the post-genomic area of cellnomics, and the separation of cells in the therapeutic and diagnostic settings (e.g. isolation of cancer cells). The EU targets for reducing landfill usage by recycling and the attendant costs are now starting to bite industry and local authorities, especially as the UK has been dragging its feet until now. Meeting these targets will require significant separation operations to deal with both domestic and industrial wastes – examples include separation of different plastics, and making hazardous waste safe for disposal by removing the toxic particles.
There are various aspects of the proposed programme that may be considered novel. The proposed classification method is, as far as we are aware, entirely novel. The scoping model will be entirely novel. There are very few EL models for liquid FBs (there are several more for the less complex gas FBs) and they have been subject to very limited validation – the model to be developed here will be validated with respect to all the relevant fields, which will be a world first. We also propose to remove various simplifications that are part of the few EL models that exist for liquid FBs (see above for details). The validated multiscale approach to be developed here in the context of the liquid FB will also be unique as far as we are aware. Finally, to our knowledge, no one has ever determined simultaneously the porosity, concentration, particle velocity, granular temperature and pressure fields for a liquid fluidised bed system, let alone one that is also being subject to vibration.
3. Relevance to beneficiaries We believe the vibrated liquid fluidised bed will be particularly useful for challenging particle systems where
the size and density ratios are close to unity, where aggregation tends to occur, and/or where solids loadings are high (i.e. where compactness or high throughput of dense systems is important). Such systems are found across industry and beyond including in various biomedical settings both at the R&D level as well as in production (e.g. blood products).
The proposed work meets several priorities of EPSRC and stake-holder sectors as articulated in their publication Research Priorities and Opportunities. Some examples include development of fundamental understanding of multiphase fluids (‘Fundamental Science Foundation’; pg. 8), the development of multiscale modelling capabilities (‘Mathematical Foundation’; pg. 11), several aspects of ‘Human-centred systems’ (pg. 52-54), ‘Materials systems’ (pg. 58 and 60), and ‘Sustainable Technologies’ (pg. 63).
4. Dissemination and exploitation It is intended to apply for a patent once the operating range of the method and finer details have been
established – it is anticipated that this will occur during the course of the project. The results of the research will also be published in international journals, on the WWW and at three conferences, with care being taken to not jeopardise the patent application. Finally, we will communicate the results of the work to potential industrial collaborators with a view to future exploitation.
Once the operating envelope of the novel method has been established for representative systems to be considered here, we intended to approach potential industrial collaborators with a view to developing prototypes specifically for their applications. We will look to organisations in the biotechnology and life sciences sectors (e.g. Scottish National Blood Transfusion Service and other organisations through the Life Sciences ITI), recycling sector and minerals processing sector (e.g. Xstrata plc.) in particular. We have deliberately adopted special particle systems here to avoid the many complications entailed by factors such as cohesive forces, non-spherical particles, complex bed geometries and the matrix of possible particle property combinations. Some of these issues will be addressable in the context of our collaboration with industry and beyond (e.g. particle properties). Other issues such

5
as cohesive particle systems and particle shape are more fundamental, however, and should be addressed through further funding in due course from the EPSRC and other appropriate funding bodies.
5. Justification of resources The experimental work clearly requires 2 persons over the three years of the grant. The variety of methods,
some of which are advanced, mandates one of these be a PDRA. The project will offer an excellent training opportunity and it is, therefore, proposed that the second experimental worker be a PhD student. Mechanical and electrical technician time will also be required to build and service the rig. The modelling aspects of the programme present several challenges. In addition to the leading edge nature of the individual models, the three-way validation of the models will be non-trivial and particularly challenging (hence its rarity in the FB context) – it is, therefore, proposed that a PDRA be appointed to each institution. In the case of Edinburgh, it is proposed to appoint Dr Buts for 30 months, who has worked with Biggs now on two grants and is an expert in the field of discrete molecular and mesoscale simulation methods and their validation against experiment, including those of direct relevance here (e.g. [24]), and is one of the main developers of our parallel software system at Edinburgh for molecular and mesoscale simulation. Appointment of anyone else in this role would increase the time of appointment to 36 months, making the grant no more cheaper overall, and would make the scoping model validation process much more challenging due to the shift in timescales.
Funds are also requested for the experimental hardware as follows (VAT is added in the Je-SRP form): (1) The fluidised bed system, which involves liquid FB (toughened and annealed optically clear Pyrex with
pressure tapings drilled – in case of breakages, allow for 2 pieces with pressure tapings (£358 each) and 2 without (£288 each), total of £1292; sintered distributor, £100), reservoir tank (£100), pump (£200), header tank and stand (£200), deaerator (£500), flow meter and control valves (£750), 30 pressure transducers (£1380), multiplexed A/D converter PC card to take signals from gauges (£700), and data logging PC (£1180).
(2) The shaker system, which includes a forced air-cooled electromagnetic shaker on suspension with amplifier capable of driving loads of up to 20 kg with amplitudes up to 25 mm (LDS V721/PA1000L is appropriate at a cost of £12350), two ICP accelerometers (£270 each) and controller that includes signal analyzer and generator (LDS Comet controller is suitable at a cost of £4881).
(3) We are currently using the DWS kit in the School of Physics at Edinburgh. We have found, however, that the speed of the PMT and correlator are far from ideal for FB systems (in particular, the photon counters and correlator are too slow, as Physics mainly use their kit for slowly evolving dilute colloidal systems). Our intention to take it off-campus for extended periods also means the current arrangement is not sustainable. We, therefore, request funds for elements of a more suitable system, which includes polarization preserving optical fibre with integrated lens and coupling (Oz Optics, Canada, £650‡), two single mode optical fibres with integrated lens and coupling (Oz Optics, £750‡), two high speed photon counters (PMT120-OP, Correlator.com, US; basic price £1315 each‡ giving at total of £2630, and a high speed correlator capable of taking two separate inputs (Flex02-01D, Correlator.com, US, £8275‡) and Ventus 532 nm 1.5 W laser (£9569); this laser has been selected as it is compact (air cooled) and robust (solid state), making it portable.
(4) Camera system for segregation studies: JVC KY-F70B colour 3-CCD digital camera with lens (£7495), SCSI board (£23), six 500W halogen lamps (£180), 3 reflective screens (£300), high end graphics computer (£2130), Image Pro (Media Cybernetics, £3500) for image analysis. The indicated camera is a step-up from that used by Goldschmidt et al. [13], and will address the various shortcomings they encountered with their lower spec camera.
(5) Funding for a PC for each worker is also requested. The experimental workers will require standard machines for data analysis and paper production, whilst the theory workers will require higher spec machines capable of running trial simulations and visualizing results. The details of the PCs for Kingston and Edinburgh due to different University bulk suppliers, which we have no choice over.
(6) The 80 CPU cluster of Biggs shall be used for compute-intensive aspects of the work. It is estimated that 10% of the cluster’s computational resources will be used over the period of the grant. At a cost of £1000 per CPU and depreciating over a 3 year cycle, this amount of computational resource is costed at £2600 per year, giving a total cost to the grant of £6500. Funding is also requested for the PEPT work at Birmingham, which costs £600 per day as approved by
EPSRC. The total number of effective days of use is estimated as 16, making the total cost £9600. Funding is also requested to support the travel, accommodation and subsistence costs associated with use of the PEPT facility (3 visits totalling 4.5 weeks for the PDRA and the PhD student at £200 travel costs (equipment will also need to be
‡ All items from OS are calculated using street exchange rates ($US1.73 and Euro 1.45 to the £) plus postage and insurance of £100. Import duty of 4.7% and VAT must be added to this, and is done in the Je-SRP form.

6
transported, so a van will be hired) and £50 per day accommodation and subsistence each). Costs are also requested for Dr Glass and Dr Biggs to accompany these workers for 2 days on the first visit (£200 accommodation and subsistence).
Funding is also requested for the investigators to present their results at the 5th World Congress on Particle Technology in the US in April 2006 where the experimental and modelling work will be presented, the Annual Meeting of the APS in the US in March 2007 where work on the models and most relevant experimental work will be presented, and the Annual Meeting of the AIChE in the US in November 2007 where work on all aspects of the project will be presented (we would look to present ~6 presentations at this conference). The costs in each case are based on 2 workers going with £350 conference fees, £500 fares and £500 accommodation and subsistence each.
6. Management Overall responsibility for the programme rests with Dr Biggs and Prof. Koenders, who will hold regular
discussions to ensure good progress is made on all aspects of the programme and to coordinate the model validation work, which involves interactions between the three main components of the programme, as described above. The PDRAs and PhD will also be encouraged to talk as often as is necessary to ensure the necessary information and understanding is exchanged. All these discussions will occur be the normal means (phone, e-mail) as well as via video conferencing, which is already used by the group of Biggs. There will, additionally, be regular project meetings every six months at Edinburgh. These meetings will involve presentation of progress and discussion of the results and the next steps. The experimental and modelling work at Edinburgh will be managed on a daily basis by Dr Glass and Dr Biggs respectively. The development of the scoping model will be managed on a daily basis by Prof. Koenders.
References 1. (a) C. Orr, Particulate Technology, Macmillan, New York, 1966. (b) K. Gotoh, H. Masuda, K. Higashitani (eds.), Powder Technology Handbook,
Marcel Dekker, NY, 1997. (c) A.W.J. Brough et al., J Chromatogr., 208, 175, 1982. (d) C.A. Silebi, J.G. Dos Ramos, J. Colloid Interf. Sci., 130, 14, 1989. (e) M.A. Rodriguez, D.W. Armstrong, J. Chromatogr. B, 800, 7, 2004. (f) P.R.C. Gascoyne, J. Vykoukal, Electrophoresis, 23, 1973, 2002.
2. E.g. (field in parenthesis) include settling and sink-and-float (gravity), inertial classification, centrifugation, cyclones, hydrodynamic chromatography & capillary hydrodynamic fractionation (flow), electrophoresis, dielectrophoresis & electrostatic processes (electric), magnetic field processes.
3. J.C. Giddings, Science, 260, 1456, 1993. 4. C.A. Price, Centrifugation in density gradients, Academic Press, New York, 1982. 5. R. Di Felice, Chem. Engng. Sci., 50, 1213, 1995. 6. (a) R.H. Richards, C.E. Locke, Textbook of Ore Dressing, McGraw-Hill, London, 1940. (b) J.M. Calo, G. Hradil, M. Tucker, in Proceedings of the
AIChE Topical Conf. Proc. on Process Development from Research to Manufacturing (K. Bhatia, M. Malone, eds.), AIChE, NY, 1999, pp. 270. (c) M.G. Rasul, V. Rudolph, F.Y. Wang, Int. J. Miner. Process., 60, 163, 2000. (d) J.M. Calo et al., J. Sep. Sci., 26, 1429, 2003.
7. A. Kudrolli, Rep. Prog. Phys., 67, 209, 2004. 8. (a) O. Gundogdu, M.A. Koenders, R.J. Wakeman & P. Wu, Chem. Engng. Sci., 58, 1703, 2003. (b) Trans. IChemE, 81, 916, 2003. 9. Criteria for particle systems selected: (a) the pairs must not be prone to significant segregation in liquid or vibro-FBs alone; (b) surface forces must be
insignificant to avoid undue complications at this early stage; (c) the size of each particle class should be well-controlled and narrowly distributed; (d) the particle sizes should be large enough relative to the bed dimensions that they can be modelled on a 1-to-1 basis in the EL simulations; (e) to avoid particle shape effects at this stage, shape should be well controlled; (f) to simplify modelling at this stage, particles should be spherical; (g) the various possible non-redundant combinations of particle pair size and density ratios, rd and rρ respectively, should be investigated (there are 3 possibilities for each ratio – > 1, = 1, < 1 – making 32 = 9, but 3 of these can be removed by symmetry and a fourth is the monodisperse case); (h) coefficients of normal and tangential restitution and friction should exist in order to avoiding extensive extra experimental work not central to the aims of this work; and (i) the particles should be suitable for PEPT and DWS. These criteria are met by pairs of large (i.e. ≥1 mm) glass particles which, on the basis of the little experimental evidence available [10, 11], should fall within the rectangular region bounded by 0.7 < rd < 1.4 and 0.8 < rρ < 1.25 in order to minimise segregation in liquid or vibro-FBs alone. Density is varied by using different glasses. Coefficients of restitution and friction exist [12].
10. Z. Tanaka, H. Mituji, T. Takahashi, Adv. Powder Technol., 7, 199, 1996. 11. A.P.J. Breu, H.M. Ensner, C.A. Kruelle, I. Rehberg, Phys. Rev. Lett., 90, 014302, 2003. 12. (a) B.P.B. Hoomans et al., Powder Technol., 116, 166, 2001. (b) M.J.V. Goldschmidt et al., Powder Technol., 142, 23, 2004. 13. M.J.V. Goldschmidt, J.M. Link, S. Mellema, J.A.M. Kuipers, Powder Technol., 138, 135, 2003. 14. D.J. Parker, R.N. Forster, P. Fowles, P.S. Takhar, Nuc. Inst. & Methods Phys. Res. A, 477, 540, 2002. 15. O. Gundogdu, E. Tarcan, Nuclear Inst. Meth. Physics Res. A, 523, 223, 2004. 16. (a) R.D. Wildman, J.M. Huntley, D.J. Parker, Phys. Rev. E, 63, 061311, 2001. (b) Phys Fluids, 15, 3090, 2003. 17. D.A. Weitz, D.J. Pine, in Dynamic Light Scattering, edited by W. Brown (OUP, Oxford, 1993), pp. 652. 18. T.L. Narrow, M. Yoda, S.I. Abdel-Khalik, Exp. Fluids, 28, 282, 2000. R.C. Chen, J. Reese, L.S. Fan, AIChE J., 40, 1093, 1994. 19. These include [ 5, 7] particle and bed surface roughness, mechanical properties of the particles and bed materials, and particle shape. 20. D. Gera, M. Syamlal, T.J. O’Brian, Int. J. Multiphase Fluids, 30, 419, 2004. 21. Y. Tsuji, T. Kawaguchi, T. Tanaka, Powder Technol., 77, 79, 1993. 22. Reasons as to why EL is superior to MF in general: (a) it is already a challenge to specify the several non-trivial closure models of MF models for the
monodisperse case [12b], let alone polydisperse systems, whereas the EL model requires far fewer much simpler closure models that, at least in part, can be specified with some certainty (e.g. [23]); (b) the EL method offers the possibility of considering in a transparent manner irregular particles, an important feature in the current context, although not required for the work proposed here; and (c) a properly validated EL model can in fact aid the specification of closure models for MF models (e.g. [12b]) – this will be exploited here. The principle disadvantage of the EL approach is computational expense. This is, however, becoming less and less of a concern as the computer power-to-cost ratio increases year on year.
23. G.A. Bokkers, M. van Sint Annaland, J.A.M. Kuipers, Powder Technol., 140, 176, 2004. 24. M.J. Biggs, S.J. Humby, A. Buts, U. Tüzün, Chem. Engng. Sci., 58, 1271, 2003. 25. J. Zhang, Y. Li, L.S. Fan, Powder Technol., 112, 46, 2000. 26. B.N. Asmar, P.A. Langston, A.J. Matchett, J.K. Walters, Comput. Chem. Eng., 26, 785, 2002. 27. A.H. Kharaz, D.A. Gorham, A.D. Salman, Powder Technol., 120, 281, 2001. 28. (a) S. Yuu, H. Nishikawa, T. Umekage, Powder Technol., 118, 32, 2001. (b) H. Zhou, et al., Trans. IChemE, 82A, 918, 2004. 29. J.T. Jenkins, D.K. Yoon, Phys. Rev. Lett., 88, 194301, 2002. 30. D.F. McTigue, J. T. Jenkins, in H.H. Shen (Ed), Advances in Micromechanics of Granular Materials, New York: Elsevier, 1992. 31. J.R. Smart, D.T. Leighton, Phys. Fluids A, 1, 52, 1989.

Timeline Chart for High-performance particle separation by vibrated liquid fluidised bedsTasks/Month 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
Task 1: Measurement of segregation variation with process parameters Purchase and manufacture fluidised bed apparatus Determine P (x , y ) and Δh vs U 0 for 4 monodisperse systems in liquid FB mode PhD/PD(E1) Determine P (x , y ) and Δh vs f and a for 4 monodisperse systems in vibro-FB mode PhD/PD(E1) Purchase, assemble and calibrate camera apparatus PhD Determine segregation, P (x ,y ) and Δh for 12 different systems at 100 different velocity/vibration combinations PhD/PD(E1) Determine further segregation, P (x ,y ) and Δh data at conditions dictated by previous study PhD/PD(E1)
Task 2: Measurement of porosity, concentration, velocity & granular temperature fields Build DWS apparatus and test (using an existing 2D gas FB) PD(E1) Test refractive index matching procedures PD(E1)/PhD Preliminary testing of DWS/PEPT (1 week) and results analysis PD(E1)/PhD 1st round of DWS/PEPT production runs (2 weeks) and results analysis PD(E1)/PhD 2nd round of DWS/PEPT production runs (1-2 weeks) & results analysis (informed by 1st round + segregation studies) PhD/PD(E1)
Task 3: Develop validated scoping model Develop initial model for monodisperse systems for vibrated liquid FB and produce initial results PD(K) Compare results with experimental data for monodisperse systems and seek reasons for mismatches if any (highly likely) PD(K)/PD(E2)/PD(E1)/PhD* Modify model appropriately and compare further with experimental data until model performs well PD(K)/PD(E2)/PD(E1)/PhD Extend model to incorporate bidispersity PD(K) Compare results with experimental data for bidisperse systems and seek reasons for mismatches if any (highly likely) PD(K)/PD(E2)/PD(E1)/PhD Modify model appropriately and compare further with experimental data until model performs well PD(K)/PhD Produce and compare predictions of validated model against wider results database PD(K)
Task 4: Develop validated detailed analysis model Develop initial model for monodisperse systems for vibrated liquid FB and produced initial results PD(E2) Compare results with experimental data for monodisperse systems and seek reasons for mismatches if any (highly likely) PD(E2)/PD(E1)/PhD Modify model appropriately and compare further with experimental data until model performs well PD(E2)/PD(E1)/PhD Produce results for bidisperse systems considered by DWS/PEPT and compare with experimental data PD(E2) Modify model appropriately and compare further with experimental data until model performs well PD(E2) Produce and compare predictions of validated model against wider results database PD(E2)/PhD Carry out simulations as necessary to support development of scoping model PD(E2)**
Major milestones (see below for details) - although all milestones can be discerned from the chart, we include these here for clarity 1 2 3 4 5 6,7Publications (see below for details) A B C D E F GConference presentations (see Part 2 for details of conferences and what is to be presented at each) WCPT5 APS AIChEA. Report on initial segregation studies; Initial patent application 1. First batch of segregation results 7. Fully validated multiscale approachB. Report on validated monodisperse EL model 2. Fully validated monodisperse EL modelC. Report on all experimental aspects 3. Fully validated monodisperse scoping modelD. Report on validated bidisperse EL model 4. All experimental data now obtained.E. Report on validated scoping model 5. Fully validated bidisperse EL modelF. Report on multiscale modelling; Patent 6. Fully validated bidisperse scoping modelG. Thesis* The order in which the researchers appears roughly indicates the level of their involvement; ** This is a background activity where work occurs as and when required by other tasks

1
Prediction of Dynamics of Proteins on Solid Surfaces over Macroscopic Timescales 1. Background The importance of proteins at solid surfaces Protein adsorption on solid surfaces occurs across science, engineering, medicine and nature.1-3 For example, protein adsorption is the first step in the body’s response to implants (e.g. artificial heart valves) that ultimately leads to complications and even life-threatening reactions such as emboli; technologies for controlling this adsorption are, therefore, under development. Similar approaches are also underpinning the next generation of tissue scaffolds to improve spatial control over cell adhesion, which is essential for growing all but the simplest tissue. Protein adsorption and migration on solid surfaces are also central to bioseparations and fouling in the process industries and beyond. Proteins also occur at solid surfaces in biosensors and arrays as sensing elements, analytes and foulants. Biosensors are ideal for use outside the laboratory and in vivo (e.g. glucose monitors of diabetics), and for continuous monitoring of the environment. The high throughput capacity of protein arrays, on the other hand, means they are playing an increasing role in diagnosis and drug discovery. Proteins at solid interfaces are also essential to nature – anti-freeze proteins allow some species to survive at sub-zero temperatures for example – such exemplars are now inspiring new ‘biomimetic’ technologies, including peptides that control crystal growth and assist in self-assembly of nanoscale entities to form complex multiscale structures. Current approach to design of technology involving proteins at solid surfaces Development of the technologies above is dominated by experimental trial-and-error.3 Just two examples are revealed by recent reviews of work on peptides that preferentially bind to inorganic solids4 and which control cell adhesion on solid surfaces.5 Whilst experiment tends to dominate, models are playing an increasing role. Examples include the ‘design criteria’ of Belcher6 for peptides that preferentially bind to certain semiconductors, the models of Lenhoff7 for chromatographic separation, and molecular models8 for peptides that control cell adhesion. Despite this use of models, most are still relatively crude and limited – for example, the ‘design criteria’ of Belcher cannot be extended to other materials, peptides or solvents, the models of Lenhoff are based on a continuum solvent and ignore protein conformational changes, and the molecular models used to study peptides for cell adhesion control do not include the solid surface and adopt many approximations (e.g. continuum solvent). These approximations and limitations greatly limit the capacity for rapid and significant leaps in innovation.3 The key to improving our capacity to design technology involving proteins at solid surfaces The vast majority of the technologies mentioned above exploit the extraordinary molecular recognition capacity of proteins. Because this capacity arises from the interplay between the chemical and structural character of proteins, it is strongly linked to their conformation both in terms of protein 3D structure as well as position and orientation on the surface. Depending on the surface, protein and solvent details, it is known that the fold of a protein adsorbed on a solid surface can differ from that of its native state, thereby modifying or destroying the molecular recognition capacity of the protein. Adoption of particular orientations may also lead to masking of the recognition capability.
In addition to being able to determine the propensity for a protein to adsorb, it is clear that design of technologies involving proteins on solid surfaces is critically dependent on being able to establish the link between protein conformation and the surface/protein/solvent triplet. This is difficult to do experimentally – no experimental method is currently able to give atomic-level details for the fold of a protein on a solid surface, whilst those that yield more course-grained single molecule data are challenging and time consuming. Experiments also of course require protein-surface-solvent triplets to physically exist! A preferable approach would be to use molecular models to carry out much of the design work in silico (in the computer), with experiment playing a ‘proof of concept’ role.
2. Programme and methodology 2.1. Aims and objectives The aim is to develop a molecular modelling approach suitable for use in the design context that predicts: (a) the propensity for a protein to adsorb on a solid surface, and (b) the conformational dynamics of the protein on the solid surface up to macroscopic timescales. The objectives are, therefore, to: (1) develop the approach; and (2) assess the suitability of the approach.
1. Weiner, S.; Addadi, L. J. Mater. Chem., 7, 689-702, 1997. 2. Kasemo, B. Surf. Sci., 500, 656, 2002. 3. Gray, J.J. Curr. Op. Struct. Biol., 14, 110, 2004. 4. Sarikaya, M.; Tamerler, C.; Jen, A.K.Y; Schulten, K.; Baneyx, F. Nature Mat., 2, 577, 2003. 5. Schaffner, P.; Dard, M.M. Cell. Mol. Life Sci., 60, 119-132, 2003. 6. Pelle, B.P.; Krauland, E.M.; Wittrup, K.D.; Belcher, A.M. Langmuir, 21, 6929-6933, 2005. 7. Yao, Y.; Lenhoff, A.M. Anal. Chem., 76, 6743, 2004. 8. Dechantsreiter, M.A.; Planker, E.; Mathä, B.; Lohof, E.; Hölzemann, G.; Jonczyk, A.; Goodman, S. L.; Kessler, H. J. Med. Chem., 42, 3033, 1999.

2
2.2. Programme of work and details of methodology Proposed molecular modelling approach Unlike for proteins in their native state, molecular modelling of proteins adsorbed on solid surfaces is in its infancy.3 Putting aside simple lattice-based models, which are of limited use in the design context, the majority of the work to date9 has focused on determining the orientation of the protein on the surface assuming the protein structure remains fixed in its native state – such models are clearly inadequate in many cases. A small number of groups have more recently considered flexible proteins at solid surfaces using global search based molecular mechanics (MM),10 Metropolis Monte-Carlo (MC)11 and equilibrium molecular dynamics (EMD) simulation.12
Given that global search based MM is the most rapid means of identifying the dominant conformation of a protein (assuming that this is associated with the global free energy minimum), it is likely to play a central role in any rapid automated screening of possible designs; we are, therefore, pursuing such developments elsewhere. However, because a solid surface will in general act to disrupt the delicate balance between the interactions that would otherwise lead to the native structure, adsorbed proteins could well spend considerable time in other conformations. It is, therefore, essential to be able to subject any candidates coming out of a MM based screening to further analysis in order to establish if it does indeed spend considerable time in other conformations that may disqualify it from further consideration – this can be done via some form of MD simulation.
EMD simulation is notorious for becoming trapped in local potential energy minima when applied to proteins at physiological temperatures, thus preventing the protein from exploring its conformational space adequately. Whilst a variety of alternative MD methods have been developed in an effort to address this issue13, even the best methods will not for the foreseeable future be able to probe all the relevant parts of the conformational space of a protein in a reasonable time except for the smallest peptides.
Exploration of the design space for peptides and proteins in a reasonable time will only be possible by making compromises. Such compromises include implicit solvent, reduced representations (e.g. united residues, on-lattice) and simplified PE models. Many of these are fine when seeking improved fundamental understanding but are not suited here where solvent effects and the delicate balance between various interactions are important. An alternative to these compromises is course-grained dynamics, which has proved very effective in identifying how the conformation of proteins in the bulk phase vary over macroscopic timescales as well as allowing determination of the equilibrium properties of proteins14 – it will, therefore, be considered here.
Very briefly,14,15 the course grained dynamics approach first requires the minima of the potential energy surface (PES) and the transition states between them to be enumerated. The partition functions and free energies of the minima and transition states are then evaluated under the harmonic approximation for a given temperature. These are used to determine the protein conformations that exist at equilibrium and protein thermodynamic properties at that temperature. The rate constants for transitions between the minima for the temperature can also be determined from transition state theory. These are used to determine the evolution of the protein conformations through time for the temperature given an initial set of conformations. Finally, the PES and free energy surface (FES) at the temperature can be visualised using so-called disconnectivity graphs,15 which aids greatly the understanding of these surfaces and the dynamics on them. In addition to avoiding the need to explore the PES in a continuous manner, this approach has the advantage that results can be obtained for any temperature once the minima and transition states of the PES surface has been enumerated. The details of the proposed application are as follows: 1. The degrees of freedom to be modelled will include the dihedral angles of the protein, the location of the
protein on and above the surface, and the orientation of the protein on the surface. 2. To facilitate testing, the solvent and PE models will be dictated by previous work (see below). 3. Our own EA-BFGS approach will be used to enumerate the PES minima; this approach has been shown to
be as efficient if not more so than other state-of-the-art global search methods. Because of the large number of minima, the EA will be implemented in parallel16 with niching17 on both the conformation and the energy.
9. (a) Roush, D.J.; Gill, D.S.; Willson, R.C. Biophysical J., 66, 1290, 1994. (b) Noinville, V.; Vidal-Madjar, C.; Sebille, B. J. Phys. Chem., 99, 1516, 1995. (c) Juffer, A.H.; Argos, P.; de Vlieg, J. J. Comp. Chem., 17, 1783, 1996. (d) Bujnowski, A.M.; Pitt, W.G. J. Colloid Int. Sci., 203, 47, 1998. (e) Ravichandran, S.; Madura, J.D.; Talbot, J. J. Phys. Chem. B, 105, 3610, 2001. (f) Song, D.; Forciniti, D. J. Chem. Phys., 115, 8089, 2001. (g) Zhou, J.; Chen, S.; Jiang, S. Langmuir, 19, 3472, 2003. (h) Sun, Y.; Welsh, W.J.; Latour, R.A. Langmuir, 21, 5616, 2005. (i) Oren et al. Nano Lett., 5, 415, 2005.
10. (a) Mijajlovic, M.; Biggs, M.J., in preparation. 11. (a) Mungikar, A.A.; Forciniti, D. Biomacromolecules, 5, 2147, 2004. (b) Mungikar, A.A.; Forciniti, D. Biomacromolecules, 7, 239, 2006. 12. (a) Braun, R.; Sarikaya, M.; Schulten, K. J. Biomaterials Sci, 13, 747, 2002. (b) Raffaini, G.; Ganazzoli, F. Langmuir, 20, 3371, 2004. (c) Raffaini and
Ganazzoli (J. Biomed. Mat. Res., 76A, 638, 2006) and previous workcited therein. (d) Cormack, A.M.; Lewis, R.J.; Goldstein, A.H. J. Phys. Chem. B, 108, 20408, 2004. (e) Kantarci, N. et al. Polymer, 46, 4307, 2005. (f) Carravetta, V.; Monti, S. J. Phys. Chem. B, 110, 6160, 2006.
13. Segev, E.; Grumbach, M.; Gerber, R.B. Phys. Chem. Chem. Phys., 8, 4915, 2006. 14. (a) Evans, D.A.; Wales, D.J. J. Chem. Phys., 119, 9947, 2003. (b) Evans, D.A.; Wales, D.J. J. Chem. Phys., 121, 1080, 2004. 15. Krivov, S.V.; Karplus, M. J. Chem. Phys., 117, 10894, 2002. 16. Alba, E.; Troya, J.M. Complexity, 4(4), 31, 1999. 17. Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs (3rd edition), Springer-Verlag, Berlin, 1999.

3
4. The approach of Evans and Wales14 will be used for identify the transition states between the minima (the OPTIM code of Wales, which is available at his web site, will be used initially).
5. The Master equation will be integrated through time14,15 to identify the conformations taken by the protein through time. The initial conditions will be the equilibrium population for the protein in the bulk phase (i.e. the movement of the protein from the bulk phase to the solid surface will be modelled).
6. The implementations of item 3 and 5 will be in parallel object oriented C++ codes using MPI. The codes will be run on the parallel computing facilities of our group and more widely in the University of Edinburgh.
Primary deliverable: codes implementing the various aspects of the course grained dynamics approach. Assessment of molecular modelling approach Given the limited time available, it will only be possible to apply the approach to a small number of systems within the period of the fellowship (see Exploitation section below, however). Initially, attention will be focused on the four residue peptide RGDS on a rigid graphite surface. This peptide has been selected because previous work on the peptide in the bulk phase15 and its size will ease greatly the assessment (the forcefield and solvent model of ref. 15 will be used), and the peptide is one of the proposed candidates for controlling cell adhesion on solid surfaces. If time permits, we will look to extend consideration to a much larger protein such as fibronectin12(b).
Primary outcomes: (1) much improved understanding of issues faced in modelling the dynamics of proteins on solid surfaces across, and (2) excellent basis for taking forward the development of a system for the rational design of technologies involving proteins on solid surfaces. Primary deliverables: Three international journal papers.
3. Timeliness and novelty Increasing interest in systems that involve proteins at solid surfaces means we need to improve our ability to understand these systems and exploit that understanding in their design. Molecular modelling can in principle fulfil this need as it uniquely provides a link between protein behaviour at the atomic-level and details of the protein, surface and solvent. The major barriers to the application of molecular modelling in the past has been limited computational resource and the absence of methods for evolving protein dynamics over macroscopic timescales. Both these barriers have been removed in the past five years with the rise of the PC cluster and development of methods such as those of Wales14 and Karplus15 amongst others – it is now time to harness these advances and develop tools that will aid the design of technologies involving proteins at solid surfaces. The molecular modelling of proteins at solid surfaces is in its infancy3. Of the few groups worldwide who have reported protein conformational dynamics at solid surfaces,12 all have used EMD, a method that is incapable of modelling the macroscopic timescales that characterise the evolution of all but the smallest peptides. Our work will address this problem by applying for the first time methods that are capable of bridging the gap between the molecular and macroscopic timescales. The planned application of the parallel-niching EA will also be a first, as will the specific application proposed here.
4. Dissemination and exploitation It is my intention to submit at least three international journal papers reporting on the work undertaken during the fellowship. I would also look to report the work on my website and, in due course, at conferences and elsewhere in the immediate aftermath of the fellowship. In particular, I would look to present my results to the members of the ‘Modelling of the Biological Interface with Materials’ group (www2.warwick.ac.uk/fac/sci/materialsmodelling) and Dalton at Surrey and other groups in Europe (e.g. Ganazzoli, Milan; Carravetta, Pisa; Janke, Leipzig) who are interested in modelling proteins at solid surfaces, as well as those who have an interest in relevant technologies and applications (e.g. Kessler, Munich; Schaffner, Darmstadt). One of the primary outcomes of the fellowship will be the laying of a firm foundation for the development of an approach (including software) for the rational in silico design of systems involving proteins at solid surfaces. There is clearly much more that will need to be done in the aftermath of the fellowship if such an approach is to become a reality. It is, therefore, my intention to seek follow-on funding to extend the methods initially developed here (e.g. explicit solvent; efficient methods for locating transition states and evolving protein conformations), and apply the methods to larger proteins such as extracellular matrix proteins. It is also planned in due course to bring these methods together with other developments in my group to carry out rational design of proteins, surfaces and solvents for specific applications – it is anticipated that this work will generate IPR for which appropriate protection will be sought through the agency of the University’s office for Research and Innovation (ERI).
5. Support fund It is intended to use the vast majority of the funds to visit the groups identified in the previous section to present my work and discuss matters of mutual interest. Wherever possible, I would look to coordinate the visits so as to reduce travel and costs (e.g. one visit to Italy, one to Germany). I would look to make these visits in the latter part of the fellowship and the period immediately following its end as indicated in the attached time chart.

1
Towards the Rational De novo Design of Peptides for Self Assembly of Complex Nanostructured Systems
1. Background The spontaneous reversible assembly of initially disordered building blocks to form a larger organized system without external intervention is termed self-assembly.1 Whilst self-assembly is ubiquitous in nature and occurs at many scales,1 of particularly interest here is the self-assembly of nanoscale building blocks like nanoparticles to form complex functional systems such as integrated circuits and solar cells. It is widely believed that self-assembly will play a central role in the efficient mass production of such technologies.1-4 Philip Ball, a Consultant Editor of Nature, even went so far as to describe self-assembly as ‘one of the holy grails of nanotechnology’.2 It is this which motivates our proposal here. As external agents cannot intervene in self-assembly, the ‘assembly instructions’ for the target structure must be encoded in its building blocks. For nanostructured systems, this encoding is in the form of networks of ‘weak’ interactions (e.g. hydrogen bonds) between distinct sites on the building blocks.1 This is best illustrated by the self-assembly of two polynucleotides to form the double helix of DNA: the hydrophobic nucleobases sit within the helix where hydrogen bonding between complementary bases of the two polynucleotides and the π-π interactions between the stacked aromatic rings of the bases stabi-lise the helix. As this example illustrates, both structural and electronic complementarity of the building blocks are important.5 In order to exploit self-assembly technologically, we must be able to identify if not, indeed, design for this complementarity1 – the work proposed here is directed to this end. There are many examples of self-assembled structures beyond those in Nature. An early example is the Langmuir-Blodgett film whilst more recent examples include liposomes for drug delivery and ordered nanoparticle arrays for sensor applications. Although these and other self-assembled structures have been demonstrated to be technologically useful, they are still relatively crude compared to those in Nature such as cells and viruses. This is due to the simplicity of the building blocks relative to those in Nature, which are often highly asymmetric. This has motivated some to build asymmetry into synthetic building blocks (e.g. Janus particles). These are, however, still relatively crude whilst also being very challenging to make. A complementary approach is to mimic (or at least harness) Nature’s building blocks.6-17 It is this biomimetic approach that is of particular interest here, where we are seeking to develop a method for the de novo design of peptides for self-assembly of inorganic and organic building blocks to form complex nanostructured systems such as integrated circuits, solar cells and biosensors. Use of biomolecules to self-assemble relatively simple nanostructured systems has already been demonstrated.8 One of the main challenges in extending this to more complex systems is the need to identify synthetic biomolecules that recognise target nanoscale building blocks and surfaces with a high degree of specificity. Using phage display technology to undertake ‘bio-panning’, Sarikaya and Tamerler9-12 have been leading efforts in this regard for over a decade now with considerable success. There are, however, significant limitations with this approach that molecular modelling can potentially address provided a number of key issues are addressed. We propose to address these issues here and thereby develop and demonstrate a molecular modelling based approach to the rational de novo design of surface-binding peptides. 2. Aim and objectives The aim of the research is to facilitate a step-change in our capacity to realise complex nanostructured systems through self-assembly of nanoscale building blocks. The objectives are, therefore, to: 1. Develop a novel approach based on molecular modelling that allows the de novo design of peptides
that recognise a target surface. 2. Develop and parameterise novel potential energy models for peptide-platinum, peptide-silica, and
peptide-graphene interactions. 3. Demonstrate the novel design approach by using it to design graphene-binding peptides that do not
bind to gold, platinum or silica, and then use them to construct a nascent electronic device.

2
3. Background Phage and other in vivo display methods have been used for just over a decade now to identify peptides that preferentially bind to target surfaces.9-12 Binding peptides have now been identified for more than a dozen surfaces, including gold, platinum and silica surfaces, and efforts are continuing.11,12 Whilst bio-panning techniques have meet with considerable success, they are not without their problems.10 The peptide sequence libraries available for in vivo approaches are quite limited both in terms of sequence size, number of sequences, and bias (some amino acids are more strongly represented in the library than others). Some of these problems can be addressed by switching to in vitro techniques, but these require a far greater degree of expertise than their in vivo counterparts.10 Even if this were not the case, experimental approaches fail completely if the target surface is not readily accessible experimentally because the material is harmful (e.g. radioactive), or cannot be isolated in sufficient quantity (e.g. specific carbon nanotubes), or simply because the material does not yet exist. Bioinformatics approaches can improve on initial finds from bio-panning.11,12 Whilst this is quite appealing because of the modest computational effort involved, it is still limited by the information that goes in. Molecular modelling founded on the prevailing physicochemistry can, on the other hand, in principle be used to predict the best binding peptide for a surface without any empirical inputs. This is demonstrated by the considerable success experienced over recent years in the use of such an approach in drug discovery,13 which essentially involves identifying small molecules that are good binders for a protein surface. The extension of this approach to peptide (and even more so, protein) binding on surfaces is, however, more challenging both because of the much greater computational effort required, and because of the traditional lack of reliable potential energy models for peptide-surface interactions. Endeavours in this direction have also been hampered by the lack of experimental data on the three-dimensional structure of peptides at surfaces, which makes it difficult to validate molecular models. Whilst there are still considerable challenges in the use of molecular modelling to design peptides that recognise target surfaces, these are diminishing with the rise of computer clusters, scanning probe methods (e.g. single molecule AFM) and algorithmic developments such as those in our group. In light of these developments, it is now timely to attempt to bring molecular modelling to bear on the problem of rational de novo design of peptides that bind selectively at target inorganic interfaces, where by ‘rational’, we mean that the approach is based in the physicochemistry, and by ‘de novo’, we mean that we start with no pre-conceived solutions in mind. Such approaches have already been used to identify protein sequences that take specific folds.14-16 What is proposed here is a step beyond this work in the sense that the peptide fold is unknown – it now part of the problem. 4. Significance and Innovation 4.1. Significance Examination of the many complex nanostructured systems found in Nature strongly suggests that one of the most promising routes to the mass production of synthetic counterparts in nanotechnology is peptide-mediated self-assembly.6-12,17,18 This potential depends crucially on being able to identify peptides that recognise target surfaces with a high degree of specificity. At present, this is largely achieved through experiment-dominated approaches. Whilst these have served the community well, they have a number of shortcomings as outlined above. It is proposed here, therefore, to develop and demonstrate a molecular modelling based approach for the identification of surface-binding peptides that will fill these gaps and thereby complement the experimental approaches to bring greater scope for innovation whilst reducing time, effort and cost. As such, the work proposed herein is contributing significantly to the quest for Philip Ball’s ‘holy grail’.2 As the proposed work will lead to greater understanding of the fundamentals of peptide interactions with solid surfaces – which is a poorly understood field at present – and lays the foundations for breakthroughs in self-assembly in nanotechnology, it is addressing directly the Breakthrough Science goal of National Research Priority (NRP) 3. As the work will lead to the generation of methodologies

3
and tools of direct use in the development of leading edge nanotechnologies, it is also contributing directly to the Frontier Technologies goal of NRP 3 and will in due course facilitate the following: 1. The mass production of high-performance nanostructured materials under mild conditions, which is
relevant to the Advanced Materials goal of NRP 3. Such potential is demonstrated by mother-of-pearl, which Nature syntheses at ambient conditions yet its specific toughness and fracture strength are the highest of all known ceramics.12
2. The mass production of electronic devices such as integrated circuits from carbon nanotubes and similar entities under mild conditions; this is relevant to the Frontier Technologies goal of NRP 3. This potential has already been demonstrated in the laboratory by a number of groups.17,18
3. The mass production of complex regular arrays of nanoparticles for magnetic and photonic applications, which is once again relevant to the Frontier Technologies goal of NRP 3. This potential has also been demonstrated in the laboratory by the group of Sarikaya.12
Although this proposal is specifically concerned with peptide-mediated self-assembly, proteins are found at solid surfaces in many other applications and hence the methods to be developed here will be applicable beyond self-assembly. Just a few examples that are relevant to Australia’s NRPs are: 1. Miniaturized biosensors for detection of disease and biological agents (e.g. arising from a terrorist
attack) with high sensitivity;17,18 this is relevant to the Frontier Technologies goal of NRP 3, and the Protecting Australia from Terrorism and Crime goal (by facilitating early detection of biohazards through ubiquitous sensing) and Transformational Defence Technologies goal (e.g. through the development of biohazard detection units with ultra-low physiological burden), both of NRP 4.
2. Protein adsorption is central to the response of the body to implants, including clot formation and rejection, and to regenerative medicine. This is relevant to goals of both NRP 2 and NRP 3.
3. Surface-binding peptides can potentially be exploited to fractionate with high precision carbon nanotubes, which is currently not possible and has been described by some19 as a ‘grand challenge’ of nanotechnology. Once again, this is relevant to the Advanced Materials goal of NRP 3.
4.2. Innovation There are five primary elements of novelty within the work proposed: 1. The proposed rational de novo design approach, which is illustrated in Fig. 2, is substantially novel. It
is at the leading edge of the field of de novo protein design14-16 in the sense that the peptide fold is not dictated beforehand; it may take on any fold, not even just a perturbation.
2. There are various proposed algorithmic innovations that are necessary to make the whole approach feasible, including use of parallel evolutionary algorithms (EAs), which are more efficient than the stochastic search methods traditionally used, the proposed dynamic, cooperative adaptivity between the two EAs, and the proposed use of a hierarchy of models for more efficient fitness determination.
3. The potential energy models and parameters for the peptide-graphene, peptide-platinum and peptide-SiO2 interactions; the peptide-gold interaction model already exists.20
4. The validated rapid methods for evaluating the fold of a bound peptide and its associated free energy of binding – without these, the proposed design approach would not be feasible.
5. Demonstration of the design approach to a nascent graphene-based field-effect transistor. These devices have great potential – one model21 suggests they could provide a 5 fold increase over the state of the art CPU but only require 5% of its energy requirements!
The work proposed here will add to the existing body of knowledge in several regards, including: 1. Greater understanding of protein interactions with gold, platinum, silica and graphene. 2. Greater understanding of the recognition processes involved in peptide binding at these surfaces. 3. Greater understanding of performance issues associated with EAs in the protein design and free
energy estimation contexts.

4
We anticipate that these aspects of novelty and demonstration of capacity to add to the knowledge base will lead to significant demand for the approaches, skills and understanding we are to develop here. 5. Approach and Methodology 5.1. Overview of design approach to be developed The rational de novo design approach to be developed identifies peptide sequences that preferentially bind at a target solid-fluid interface. As shown in Fig. 2, this is to be done by coupling in silico evolution-based identification of candidate binders to their detailed experimental and/or theoretical characterization . If this indicates the candidates are invalid, the models and algorithms underpinning the in silico evolution are modified . If they are found to be good, sequence analysis can be used to identify amino acid sequences that may play a strong role in the binding which can then be used to better focus further in silico evolutionary searches . Data from experimental combinatorial searches can also be used as input . As shown in Fig. 3, the in silico evolutionary process of Fig. 2 will be based on an evolutionary algorithm (EA) operating on a population of peptide sequences whose fitness is defined by their binding free energy for the target surface. Because this ‘sequence-EA’ accumulates knowledge as it explores the sequence-fitness land-scape, it offers the possibility of finding good binders without undertaking either an impractical exhaustive search or very limited random search. The binding free energies will be determined by a second EA ( ‘energy-EA’) using physicochemical based models. 5.2 Details of work to be done The research is composed of three work packages (WPs) that correspond to the 3 objectives above. Details of the materials to be studied and these WPs follow below along with a timeline in Table 1. Task WP Year 1 Year 2 Year 3 Implement and assess parallel sequence-EA (RA) 1
Evaluate accurate estimates of ΔGb for close-loop test (PhD0) 1
Implement and assess non-linear encodings (PhD1) 1 Implement and assess multi-resolution approach (PhD1) 2 Implement and assess entropy models (PhD1; support by PhD0) 2 Fit LD model to solvent data (PhD2) 2 Develop & fit PE models for peptide-surface interactions (PhD2) 2 Synthesis of graphene (PhD3) 3 Preliminary study of existing GBP as a vehicle to learn (PhD3) 3 Open-loop testing (PhD3 – expt; others – modelling) 1/3 Identify GBP and assemble nascent GFET (PhD3) 3
Table 1. Timeline showing main tasks described in detail below and primary staff undertaking each.
WP 1: Evolutionary algorithm (EA) developments This WP is concerned with the development and testing of the sequence-EA illustrated in Fig. 3, including its coupling with the energy-EA, and the optimization and testing of both this and the energy-EA individually and collectively. Closed-loop tests involving a range of problems with already known solutions will be undertaken initially so as ensure the EAs are correctly functioning and to determine their performance scalings. These will be followed by open-loop test for the gold and platinum surfaces.
Y
Candidatebinders
Models andalgorithms
in vivo or in vitrocombinatorial search
Experimental &detailed theoretical
characterization
in silicoevolution
Sequenceanalysis
Arecandidates
valid?
N
1
2
3
4
5
6
Fig. 2. The rational de novo design approach to be developed.
Y
Candidatebinders
Models andalgorithms
in vivo or in vitrocombinatorial search
Experimental &detailed theoretical
characterization
in silicoevolution
Sequenceanalysis
Arecandidates
valid?
N
1
2
3
4
5
6
Y
Candidatebinders
Candidatebinders
Models andalgorithmsModels andalgorithms
in vivo or in vitrocombinatorial search
in vivo or in vitrocombinatorial search
Experimental &detailed theoretical
characterization
Experimental &detailed theoretical
characterization
in silicoevolutionin silico
evolution
Sequenceanalysis
Sequenceanalysis
Arecandidates
valid?
N
1
2
3
4
5
6
Fig. 2. The rational de novo design approach to be developed.
Mnth 6-12 in Modena
Mnth 6-12 in Seattle

5
Development of sequence-EA, including its coupling with the energy-EA This aspect of the WP will involve the RA applying our existing EA technology22 to peptide sequences as shown in Fig. 3. In the first instance, the EA will be implemented as a serial code and, so as to maintain reasonable computational times during testing and circumvent the issues around integration of the two EAs (see below), sequence fitness will be encoded in a pre-computed look-up table. The need to evaluate the binding free energy of potentially many 1000s of sequences in a single de novo design simulation means parallelization of the codes is essential. Parallelization is complicated here by the fact that the optimal parallelization strategy could well vary during a de novo design simulation because of the EA adaptivity that must be implemented as described immediately below. Lets suppose, for the sake of argument, that both EAs start with a steady-state replacement strategy. In this case, parallelization of the energy evaluation is best. This would become sub-optimal if, however, the energy-EA were to adapt towards a generational replacement strategy over the course of the simulation as it would involve more inter-processor communication compared to, say, parallelization across the conformers. Whilst there is a considerable body of knowledge on parallel EAs in general23 and some limited work on their load balancing under dynamic conditions,24 to the best of our knowledge no one has considered load balancing for one adaptive EA embedded within another. Consequently, in collaboration with PhD1, the RA will expend considerable effort on developing novel dynamic parallelization strategies. One possible strategy is to view each generation in the sequence-EA as a hierarchy of tasks of decreasing but varying computational load, and then farm these out to the CPUs by graph partition methods that take into account cost of the tasks and the characteristics of the computer. This and other dynamic load balancing strategies used in other context25 will be considered.
QA
G
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Flow diagram of one possible EA underpinningthe in silico evolutionary process in Figure 2 Example for 3-mer
P(0) =
EA calc. of ΔGb
AD
S
DR
A
AQ
Q
P(1) − 1 = KA
S
AD
SA
QA
AQ
T
−31EA calc of ΔGb
+16
AQ
Q
−14
QA
G
+50
AQ
G
−10
DR
A
+90
KA
S
−3
AD
S
QA
GD
SGD
QG
+24
AD
S
AQ
T
DR
A
AQ
Q
P(1) = KA
S
QA
G
NP = 6
NP = NP −1
It does not terminate this generation as the new sequence AQT is better than the previous best sequence (QAG). However, if the best sequence is not bettered over a good number of generations, the simulation terminates.
NP = 6
Fig. 3. The in silico evolutionary process uses an EA to evolve a population of peptide sequences using the surface binding free energy, ΔGb, as the basis for assessing sequence fitness. The flow diagram (left) is a possible EA and the first step in this is shown right.
QA
G
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Flow diagram of one possible EA underpinningthe in silico evolutionary process in Figure 2 Example for 3-mer
P(0) =
EA calc. of ΔGb
AD
S
DR
A
AQ
Q
P(1) − 1 = KA
S
AD
SA
QA
AQ
T
−31EA calc of ΔGb
+16
AQ
Q
−14
QA
G
+50
AQ
G
−10
DR
A
+90
KA
S
−3
AD
S
QA
GD
SGD
QG
+24
AD
S
AQ
T
DR
A
AQ
Q
P(1) = KA
S
QA
G
NP = 6
NP = NP −1
It does not terminate this generation as the new sequence AQT is better than the previous best sequence (QAG). However, if the best sequence is not bettered over a good number of generations, the simulation terminates.
NP = 6
QA
G
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Evaluate ‘fitness’ of new offspring
Generate initial population of NP sequences, P(0)
Evaluate ‘fitness’ of sequences in P(0)
StopTerminate? Y StopTerminate? Y
Create offspring by crossover
Mutate offspring
P( g + 1)formed?
Y
g = g + 1
Copy NC sequences directly to P(g + 1)
Select parents from P(g)
Add offspring to P(g + 1)
Flow diagram of one possible EA underpinningthe in silico evolutionary process in Figure 2 Example for 3-mer
P(0) =
EA calc. of ΔGb
AD
S
DR
A
AQ
Q
P(1) − 1 = KA
S
AD
SA
QA
AQ
T
−31EA calc of ΔGb
+16
AQ
Q
+16
AQ
Q
−14
QA
G
−14
QA
G
+50
AQ
G
+50
AQ
G
−10
DR
A
−10
DR
A
+90
KA
S
+90
KA
S
−3
AD
S
−3
AD
S
QA
GD
SGD
QG
+24
AD
S
AQ
T
DR
A
AQ
Q
P(1) = KA
S
QA
G
NP = 6
NP = NP −1
It does not terminate this generation as the new sequence AQT is better than the previous best sequence (QAG). However, if the best sequence is not bettered over a good number of generations, the simulation terminates.
NP = 6
Fig. 3. The in silico evolutionary process uses an EA to evolve a population of peptide sequences using the surface binding free energy, ΔGb, as the basis for assessing sequence fitness. The flow diagram (left) is a possible EA and the first step in this is shown right.

6
Implementation of EA adaptivity Our previous work indicates the performance of the energy-EA is sensitive to its design and control parameters,22 and to the nature of the fitness landscape,26 which is defined by the protein and the potential energy (PE) model. The performance of the sequence-EA is also expected to be sensitive to protein size and the size of the amino acid library used. Although optimal EA design and control parameters can be identified on a case-by-case basis using a parametric approach, this is clearly impractical in the setting envisaged here as just one de novo design simulation will involve consideration of potentially many 1000s of different sequences without human intervention. It is, therefore, essential to establish which EA design elements and control parameters most influence EA performance in the contexts relevant here, and then implement appropriate adaptivity. Our previous work indicates EA performance is sensitive to mutation probability and generation gap, which in effect shifts the design between the two common replacement strategies: generational and steady-state. Also, although our previous work suggests that the selection strategy and associated control parameters may also influence EA performance, it is not clear which are the most appropriate strategies in the current context. The RA will, therefore, investigate how performance of the EAs varies with the selection strategies and associated control parameters. They will then exploit existing knowledge27 in the field to implement adaptivity in the mutation probability, generation gap and, if necessary, the selection strategy and associated control parameters. The energy-EA22 currently uses a linear encoding of the protein structure in the form of a listing of the dihedral angles from N- to C-term. A linear encoding of the amino acids will also be used initially in the sequence-EA. Despite their wide use, such linear encodings are not always optimal. Indeed, they are likely to be far from so when used to determine the structure and energy of β-sheet and multi-domain proteins where the interactions between widely separated residues that sustain such folds are unlikely to survive under crossover and mutation.28 Non-linear encodings such as distance-matrices29 and graphs30 are likely to be superior.31 PhD1 will investigate the EA performance for these alternative encodings; in each case, they will define the most data structures and associated mutation and crossover operators. Closed-loop testing A number of tests will be used during the above development process in order to determine correctness and performance scalings. So as to avoid the uncertainties that inevitably arise out of comparison with experiment, these tests will be ‘closed-looped’ in the sense that the ‘correct’ solution will be defined by the physics underpinning the free energy determination. In testing the energy-EA, the following will be considered: (1) α-helical polyalanine of 5, 8 and 15 residues in vacuo; (2) the 5-residue met-enkephalin in vacuo and in water; (3) the 8-residue peptide T in water, which is a β-sheet; (4) a 15-residue fragment of protein G, which is a β-hairpin; (5) polyalanine of 5, 8 and 15 residues at a gas-solid interface; (6) met-enkephalin at the gas-graphite and water-graphite interfaces; (7) the dipeptides Ala-Glu and Ala-Lys at the gas-TiO2 interface. These have been selected because they provide a range of sizes, folds and surfaces. The correct solution for each will be determined by PhD0 using more accurate free energy calculation methods.32 This student, Mr Matt Penna, has just started his PhD and will have been working on this task from approximately mid-2009. In the case of the sequence-EA, we will consider the following problems: (1) 1-3 residue sequences on the graphite basal surface in which the amino acids are drawn from the 20 natural acids or a subset thereof and are modelled atomistically; and (2) on-lattice sequences of up to 20 hydrophobic/hydrophilic (HP) residues at smooth and patterned surfaces of various types (simple attractive, H, P) in the presence and absence of solvent.32 These problems have been selected because they collectively allow the size of the sequence space to be varied from O(1) to O(106) in small steps whilst still allowing identification of the correct solution via exhaustive enumeration. Open-loop testing Once the initial models, algorithms and protocols have been assembled to form the prototype de novo design approach, it will be tested as per of Fig. 2 by considering 14-mers on the {111} gold surface

7
(this system has been selected as the initial open-loop test because Au does not oxidize and there are already a number of well characterized Au-binding peptides of similar length thanks to the work by Sarikaya over the past decade). Once candidate Au-binding peptides have been obtained from the de novo design simulation, they will be compared with the Sarikaya peptides using the sequence alignment method developed by Sarikaya’s group. The significance of the degree of similarity will be established by comparing the binding free energies (FE) obtained from the energy-EA for the two sets of peptides. If the calculated binding FE of the designed candidate peptides are clearly inferior to those of the Sarikaya peptides, the sequence-EA has failed. If this is the case, the RA will elucidate the reasons for the failure by examining how the population of sequences evolves during the de novo design simulation, and take appropriate remedial action in collaboration with the relevant PhDs. For example, if analysis reveals one of the sequences quickly dominates the population, the EA control parameter adaptivity will be reconsidered to better ensure the exploitation-exploration balance. If the calculated binding FE of the candidate peptides are substantially better than the calculated FE of the Sarikaya peptides, experimental work will be undertaken by PhD3 to ensure this is fact, as it could also be due to a failure of the energy-EA to predict correctly the binding FE of the Sarikaya peptides, or a failure of the models underpinning this prediction. If the experimental work reveals the candidate peptides are indeed better than the Sarikaya peptides, the sequence analysis of the candidate peptides will be used as input to a new round of in vivo combinatorial work undertaken by PhD3 to see if the experimentally determined structures can be improved on using this information. If, following the experimental work, it is apparent that the energy-EA has failed to yield the correct binding FE for the Sarikaya peptides, two possibilities must be considered – potential failure of the EA itself and/or potential failure of the underpinning models. As for failure of the sequence-EA, the RA will address the former by examining how the population of conformations evolves during the energy-EA simulations. The potential failure of the underlying models will be addressed in part by PhD3, who will compare the experimentally obtained FE, heat and entropy of binding, binding strength and secondary structure (see below) for the candidate and Sarikaya peptides against the predictions obtained from the energy-EA. Experimental methods As part of the open-loop testing, PhD3 will synthesis and characterize the candidate peptides as follows: 1. The peptide will be synthesized using Fmoc solid-phase peptide synthesis (SPPS). 2. The surface-binding propensity of the peptide will initially be assessed by functionalizing it with
biotin, incubating the surface in a solution of the functionalized peptide and a streptavidin-conjugated quantum dot, and then imaging with fluorescence microscopy.
3. If a peptide shows significant binding, the kinetics of its adsorption from solution on to the surface will be determined by QCM, SPR and AFM. Assuming an appropriate adsorption mechanism (e.g. Langmuir), the QCM and SPR data will be inverted to obtain the binding FE and, using the van't Haff theory with data obtained over a temperature range, heat and entropy of binding. The heat of binding will also be independently determined by microcalorimetry.
4. If the candidate peptide shows significant binding, its secondary structure and assembly in the adsorbed state will be elucidated using CD and AFM, whilst the nature and strength of the binding will be elucidated using single molecule force spectroscopy.
The thermodynamic, structural and quantitative binding data obtained for candidate peptides that demonstrate binding will be compared directly with the predictions of the energy-EA.
WP 2: Development of physicochemical models and protocols for their parameterization Determination of the binding free energy (FE) by the energy-EA requires appropriate models for the protein, solid and solvent, the interactions within and between these, and the entropic contributions. This WP is concerned with identifying the most appropriate models for these elements and the protocols for their parameterization. Given the expense of the de novo design simulations, the most appropriate

8
models and parameters will inevitably represent a balance between accuracy and expense – this balance will be determined here by iterating on the models and parameters as illustrated in Fig. 2. Protein models and intra-protein potential energy models To date we have used all-atom protein models in which the dihedral angles are free to take any value, and we will continue to use them here within the multi-resolution approach we propose below. There are a plethora of physics-based PE-models for such all-atom protein models.32 One of the most popular is the Amber PE model, which has been under continual development since the early 1980s. There are now non-polarisable and polarisable forms, and parameters have been derived by both the developers and third-parties for a host of biomolecules and organics. Given these facts and our positive experience to date with this model,22,26 we will use it as the basis for the work proposed here. We will, however, consider other PE models if analysis suggests this aspect of the calculations is unsatisfactory. So as to reduce computational cost of the energy-EA, the PE of new conformers is only evaluated if no atoms overlap. However, given that even a good fraction of these conformers will be uncompetitive, further savings can be made by only employing the all-atom model if an initial estimate obtained from a course-grained model suggests a conformation is likely to be competitive. PhD1 will develop this multi-resolution approach by establishing the most appropriate degree of course-graining and the associated parameters using data obtained from the all-atom Amber model and testing as described in WP1. Evaluation of entropy contribution Only solvent entropy has been included in our work to date; that of the peptide has been ignored. The reduction in peptide mobility upon adsorption means this needs including; this will be done by PhD1. The need to rapidly evaluate entropy precludes methods based on extensive conformational sampling; approximate methods are required. The entropy can be divided into internal (i.e. intra-peptide vibrations) and external (i.e. free peptide motion) components. The latter in the bulk will be estimated by the ideal gas model, which appears to work well in modelling of ligand-protein binding. In the first instance, they will be assumed to remain unchanged upon adsorption unless the protein molecule is tightly bound (i.e. Eb/kT < 1), in which case the external entropy components normal to the surface and about the axes parallel to the surface will be assumed zero, or the barriers to protein translation across the surface are significant, in which case the other components will be assumed zero. It will also be assumed in the first instance that the internal entropy change upon adsorption will be zero. These assumptions will be assessed by comparison with normal mode analysis and more complex models.32 Solvent model To date we have used the Langevin dipole (LD)33 method to model the solvent because it is computationally far cheaper than explicit methods yet it is able to capture hydrogen-bond bridges and solvent structuring between surfaces, both of which are important here. We have already shown that the existing LD model parameters work well with the ff94 version of the Amber PE model. A similar confirmation will be required for the more recent versions of the Amber PE model and appropriate re-parameterization undertaken if necessary. It will also be necessary to determine the parameters for the LD-solid surface interactions. This will be undertaken by PhD2 by fitting the LD model to the solvation data of the relevant ions and water-solid interfacial energies.33 Surface model and protein-solid interaction model A good number of previous protein-metal surface studies smooth out the solid structure, whilst it is also common to smooth out that of graphite. Although this approach will be used here in initial tests, it is not appropriate when the peptide-surface distance is small. Moreover, peptide-surface registry is likely to play a role in discriminating between good binders. Surface structure will, therefore, be explicitly included as soon as it is practicable, although in the case of the metal surfaces, we will look to treat the first few layers of the surface explicitly, with the remainder being a continuum. Of all the reported simulations of proteins on metal surfaces, only Iori and Corni20 include adsorbate-induced polarization of the free metal electrons and the resultant electrostatic interactions; the remainder include dispersion and Pauli repulsion only. Polarization of the metal electrons is likely to be important

9
due the inhomogeneous charge distribution of peptides and peptide/surface-induced solvent structuring. The electronic structure of graphene sheets are also likely to be modified by the partial charges on the peptide and water. We will, therefore, look to in general include electron polarization in addition to dispersion, electron overlap and S-metal bonding following the approach of Corni and co-workers.20 The protein-surface PE model will also be parameterized following these workers; this will be done by PhD2 under the supervision of Dr Corni.
WP 3: Demonstration of the de novo design approach: Towards graphene-based nanoelectronics The now optimized de novo design approach will be used to identify peptides that bind to the various graphene surfaces with high specificity. These will then be used in an attempt to self-assemble graphene between two electrodes to form a nascent (i.e. core, not working) graphene field-effect transistor. Identification of the graphene binding peptides Identification of the peptides that bind to a particular graphene edge (zig-zag; armchair) or the basal surface with high specificity first requires identification of the peptides that bind to the target and then elimination of all those in this set that are subsequently found to bind to the gold, platinum or silica surfaces. These will then be synthesised and tested by PhD3 as described in WP1 for the other surfaces. Assembly of nascent graphene-based field-effect transistor Once the graphene-binding peptides have been identified for the various edges and surface, they will be synthesised and then linked to the already know gold- and platinum-binding peptides (that do not bind to silica) to form the bi-functional peptides GBP-L-AuBP and GBP-L-PtBP respectively, where GBP = graphene binding peptide; a triglycine will be used as the linker, L, in the first instance. A sheet of silicon patterned with Pt and Au ‘electrodes’ will be dipped in to a solution of these peptides and graphene before being removed. The surface will then be studied to determine if the bifunctional peptide has indeed anchored graphene sheets across the gap between the two electrodes. The hydrophobic nature of graphene makes it challenging to obtain a stable dispersion. Fortunately, a couple of groups have very recently published methods for producing stable graphene dispersions and we will, therefore, look at using one or other of these in the first instance.34,35 The graphene binding peptides will, in this case, need to be design in the context of the solution involved. We will, however, also in due course look to design graphene binding peptides for a water solution and then fuse onto these a hydrophilic tail so as to form a potential dispersant that only physisorbed to the graphene. 6. National Benefit As argued in §E3.1, by developing the techniques and know-how in use of molecular simulation to identify peptides that recognise a target surface with high specificity, we are laying the foundations for addressing what Philip Ball, Consultant Editor of Nature, terms one of the ‘holy grails’ of nanotechnology – this is a major outcome of this research. The consequences of this work will in due course (over the next 10 years) be profound – nanoelectronic devices that will be an order of magnitude faster than today’s CPUs requiring only fraction of the energy requirements, and highly sensitive miniature biosensors technologies that underpin the next generation (P4) of healthcare and ubiquitous sensing, which will help safeguard our society against stealth chemical and biological attack. The above examples and those provided in §E3.1 demonstrate that this proposal represents the development of cutting-edge techniques and science (NRP 3: Frontier Technologies and Breakthrough Science) that will facilitate the development of advanced nanosystems and nanocomposites that, amongst other things, will help protect Society from terrorism and provide transformational defence technologies (e.g. sensitive biosensors of low physiological burden). This work also provides an excellent opportunity for young researchers (the RA and PhD students) to work at the leading edge of the field with world leaders. In addition to facilitating the establishment of international collaborations with international experts, it will provide a way of transferring to Australia this expertise and know-how for its long-term benefit.

10
7. Communication of Results Publications in journals such as Nature Materials, Nano Letter and Small will be prepared on the work. We will also present the work at the annual ACS and MRS meetings in the US. All new results will also be mounted on a project-specific website as they become available. 8. Role of Personnel Prof. Biggs will provide overall intellectual direction, leadership and management of the proposed programme. He will play similar roles in the theoretical aspects of the programme, which will involve direct supervision of the RA and PhD0 to PhD2. He will also look to build his understanding of the experimental aspects of the work under the tutelage of Prof. Sarikaya to the point where he can provide day-to-day leadership and management to PhD3 from month 18 onwards when Prof. Sarikaya returns to the US. Prof. Sarikaya, who is a World leader in the field and brings tremendous experimental know-how to the project, will lead the experimental aspects and will be responsible for the training of PhD3 when they visit his lab (months 6-12) and when Prof. Sarikaya visits Adelaide (months 12-18). Dr Corni, who is an expert in the development of potential energy models and first principles calculations amongst other things, will lead the development of the potential energy model and, as such, will play a lead role in the supervision of PhD2 when they visit his lab (months 6-12) and when Dr. Corni visits Adelaide (two months within the second year). The RA will be primarily responsible for the development of the evolutionary algorithms and application of the design approach in due course. They will, as such, play a lead role in the supervision of PhD1, who will be primarily concerned with the energy-EA (implementing all interactions, entropy and non-linear encodings for this EA), and contribute strongly to the supervision of the remaining students also. PhD2 will focus on the development and parameterization of the potential energy models for the protein-surface interactions. PhD3 will focus on all the experimental aspects of the work. Finally, PhD0 (Mr Matt Penna, start March 2009), who is not to be funded from the grant, will provide the free energy of binding for the various closed-loop test molecules using more rigorous methods. All will contribute to dissemination efforts. References 1. Whitesides GM; Grzybowski B (2002). Science 295:2418. 2. Ball P (2001). Tech. Rev. 104:31. 3. Service RF (2005). Science 309:95. 4. Barth JV; Costantini G; Kern K (2005). Nature 437:671. 5. Lindoy LF; Atkinson IM (2000). Self-Assembly in Supramolecular Systems. Royal Society of Chemistry: Cambridge, UK. 6. Mirkin CA; Taton TA (2000). Nature 405:626. 7. Ball P (2001). Nature 409:413. 8. Niemeyer CM (2001). Angew. Chem. Int. Ed. 40:4128. 9. Sarikaya M; Tamerler C; Jen A KY; Schulten K; Baneyx F (2003). Nature Mat. 2:577. 10. Sarikaya M; Tamerler C; Schwartz DT; Baneyx F (2004). Annu. Rev. Mater. Res. 34:373. 11. Tamerler C; Sarikaya M (2007). Acta Biomater. 3:289. 12. Tamerler C; Sarikaya M (2008). MRS Bull. 33:504. 13. Jorgensen WL (2004). Science, 303:1813. 14. Dahiyat BI; Mayo SL (1997). Science 278:82. 15. Park S; Yang X; Saven JG (2004). Curr. Op. Struct. Biol. 14:487. 16. Fung HK; Welsh WJ; Floudas CA (2008). Ind. Eng. Chem. Res. 47:993. 17. Katz E; Willner I (2004). Angew. Chem. Int. Ed. 43:6042. 18. Katz E; Willner I (2004). ChemPhysChem 5:1085. 19. Krupke R; Hennrich F (2005). Adv. Eng. Mat. 7:111. 20. Iori F; Di Felice R; Molinari E; Corni S (2009). J. Comp. Chem. Accepted 10 Oct. 2008 for publication. 21. Zhang Q; Fang T; Xing H; Seabaugh A; Jena D (2008). IEEE Electron Device Lett. 1. 22. Djurdjevic DP; Biggs MJ (2006). J. Comp. Chem. 27:1177. 23. Cantú-Paz E (1998). Calc. Paral. Res. Sys. Rep. 10:141. 24. Adeli H; Kumar S (1995). J. Aerospace Eng. 8:156. 25. Sodan A (1996). J. Symbolic Comp. 21:615. 26. Mijajlovic M, Biggs MJ; Djurdjevic DP (2009). Evolut. Comput. Accepted 3 Feb. 2009 for publication. 27. Lobo FG; Lima Michalewicz Z (2007). Parameter Setting in Evolutionary Algorithms. Springer-Verlag: Berlin. 28. Goldberg DE et al. (1989), Complex Sys. 3:493. 29. Piccolboni A; Mauri G (1998). LNCS 1363:123.

11
30. Globus A; Lawton J; Wipke T (1999). Nanotech. 10:290. 31. S. Beiersdörfer et al. (1996). LNCS 1141:972. 32. Chipot C; Pohrille A (2007). Free Energy Calculations. Springer: Berlin. 33. Florián J; Warshel A (1997). J. Phys. Chem. B 101:5583. 34. Li D; Müüller MB; Gilje S; Kaner RB; Wallace GG (2008). Nature Nanotech. 3:101. 35. Hernandez Y; et al. (2008). Nature Nanotech. 3:563.

12
JUSTIFICATION OF FUNDING REQUESTED FROM THE ARC 2.1 Personnel (Salaries + On-costs) A Senior Research Associate starting at level B4 (rising to level B6) is requested to lead the modelling work. An RA of this seniority is requested because: 1. The RA will need to be able to develop and deploy a diverse set of modelling methods ranging
from parallel evolutionary algorithms (EAs) to solve minimization problems to advanced Monte-Carlo and molecular dynamic (MD) simulation of proteins.
2. The RA will need to have a diverse range of skills including being adept at high-level coding in the parallel computing context, and either come equipped with or be able to learn about and implement dynamic load balancing techniques for efficient parallel processing.
A total of three PhD students are requested to undertake various model development and applications work (PhD1 and PhD2) and experimental work, which are all essential to achieving the final objective. 2.2 Equipment By taking advantage of various local, national facilities and those in the lab of Prof. Sarikaya as well as the extensive parallel computing facilities of the eResearch SA, the equipment requests are very modest indeed. However, because the Senior RA and two of the PhD students will need to visualise complex three dimensional molecular structures, a high end graphics workstation is requested for each of them at a cost of $4500 for the RA’s machine and $3000 for those of the PHD students (because they will be subsidized by the School). 2.3 Maintenance The maintenance budget reflects the anticipated costs of the experimental programme based on the current costs of operation in the labs of Prof. Sarikaya. The first heading (Chemicals and glassware) includes the various chemicals associated with, for example, the synthesis of the graphene and the more advanced characterization work, as well as the various forms of glassware and other vessels that are required. The second heading under consumables (Instrument consumables and maintenance) includes basic chemicals necessary for the experimental kit to be used, and cover for the breakage of instruments through accident and wear-and-tear over time. The third heading (Charges for central facilities) represents the fact that we will need to access a number of experimental facilities through national facilities such as AMMRF as well as local facilities that are not available otherwise (e.g. SPR; protein synthesis). The costs for the former are modest because of heavy subsidization both by the University of Adelaide, and hence the requested sums are modest. 2.4 Travel Both PIs bring essential expertise to the proposal. In order to learn from the PIs (and bring back some of their expertise to Australia for the future), PhD2 and PhD3 will each spend six months in the labs of the PIs to learn about the respective techniques. The accommodation and subsistence costs have been based on local advice (they are much less than the per diem costs), whilst estimates of the airfares were sourced from the internet. Funds are also requested to allow the CI to spend one week in the labs of each of the PIs so as to ensure the work in their labs is focused correctly and to develop the collaborative relationship. The funds requested for accommodation and subsistence are based on what the ATO believes are reasonable travel and overtime meal allowance expense amounts in Italy and the US. Funds are also requested under the ICA scheme to bring both PIs to Adelaide for extended period so that they may continue to supervise their respective PhD students as well as enhance the transfer of their know-how to Adelaide for the future. In the case of Prof. Sarikaya, an airfare of $2800, a accommodation and subsistence of $1600+$1600 per month for six months are requested (total of $25400). In the case of Dr Corni, an airfare of $2000, and accommodation and subsistence of $1600+$1600 per month for two months are requested (total of $8400). The accommodation and subsistence costs have been based on local knowledge and what is reasonable for colleagues of their

13
standing (they are much less than the per diem costs), whilst estimates of the airfares were sourced from the internet. Funds are also requested to allow the CI to present the work at two key international conferences in the field (ACS and MRS meetings) in 2010 and 2011. Some funds are also requested to cover the attendance of the RA at the second of these conferences, although their travel costs will be covered by the School (see next page). Once again, the accommodation and subsistence costs are based on what the ATO believes are reasonable, and the airfares have been estimated from web-based search.

C1 Project Title Improved models of nanoporous carbons for greater fundamental insight and better sustainable technology C2 Aims and Background Learned bodies1,2 have recently argued that the switch to more sustainable energy and process technologies is one of Humanity’s top ‘Grand Challenges’. Nanoporous carbon can contribute significantly to meeting this challenge. However, as the US Department of Energy asserts for such materials where nanointerfacial effects are critical,3 this contribution will only be fully realised if molecular modelling is more fully brought to bear. The capacity to do this is at present limited even with current state-of-the-art models in the field, as they omit two features of nanoporous carbon that are key in sustainable technology: heteroatoms and the mesoscale. We propose, therefore, to develop a new molecular model of nanoporous carbons that address these issues and then demonstrate its capacity to bring major change in the field by using it to develop improved carbons for two important sustainable technologies: ‘carbon capture’ and hydrogen storage.
C2.1 Aims and objectives The aims of the proposed work are to revolutionise the capacity to develop novel nanoporous carbons for sustainable technologies and to demonstrate this new capacity. These aims will be achieved by meeting the following two objectives: 1. Develop a new molecular model of nanoporous carbons that addresses the two main issues with all current state-of-the-
art models in the field by: (a) rigorously including heteroatoms; and (b) spanning from the molecular to the mesoscale. 2. Demonstrate the new model approach to building Virtual Porous Carbons by using it to improve fundamental
understanding of and develop better nanoporous carbons for: (a) carbon dioxide capture, a core requirement for continued use of coal-fired power stations; and (b) hydrogen storage, a major barrier to use of hydrogen as a fuel.
C2.2 Background Nanoporous materials, including nanoporous carbons, have a strong role to play in sustainable technology The large surface areas per unit mass and molecular-sized pores of nanoporous materials means they are being increasingly exploited in sustainable energy and process technologies. One of the most popular class of nanoporous material used to date are zeolites – they are, for example, at the heart of many shape- and size-selective catalysts technologies that seek to minimise wasteful side-reactions.4 The large surface areas of nanoporous carbon means these non-crystalline materials also have a place in sustainable technologies. They are, for example, now core to the Li-ion batteries5 that are to power the next generation of hybrid vehicles6 that will contribute in the near-term to reducing the impact of the growing transport sector on CO2 emissions.7 Nanoporous carbon is also a contender for efficiently separating CO2 from combustion exhaust streams,8 a key element to the continued use of coal.7 Finally, nanoporous carbons may form the basis of effective hydrogen storage media,9 the absence of which is a major barrier to use of hydrogen as a fuel.10
Molecular modelling can be a powerful tool for developing nanoporous solid-based sustainable technology The US Department of Energy (DOE) sees molecular modelling as playing a central role in realising the full potential
of materials where interfacial effects dominate such as in nanoporous carbons.3 The success of Sir John Meurig Thomas FRS, who has for decades now used experiment in combination with molecular modelling to understand processes within zeolites and increasingly design them from scratch,4 certainly supports this assertion of the US DOE. Current molecular models of nanoporous carbons are limited in the sustainable technology context
The slit-pore model, Fig. 1(a), has dominated the nanoporous carbon field for 60 years now. It is, however, now recognised that this model omits significant details that limit its usefulness, including pore walls of varying finite thickness,11 finite length pores and the significant surface area that arises from them,12 the pore system topology that is important in diffusion,13 and realistic inclusion of the heteroatoms that are important in many sustainable technologies.
The shortcomings of the slit-pore model have lead to the development of more complex models like that in Fig. 1(b), which, as the invited review of Biggs14 clearly demonstrates, have much to offer. The early Virtual Porous Carbon models, due to Biggs15 & others,16 were built from experiment-inspired building-blocks to match ‘super-molecular’ characteristics of target carbons such as its density. Whilst this ‘top-down’ reconstruction approach allows large volumes to be modeled, use of assumed building-blocks limits the capacity to accurately capture atomic-level details of nanoporous carbons.
Fig. 1. Two main classes of model used for nanoporous carbons: (a) Slit-pore model where a pore of width h is defined by the basal surfaces of two opposing semi-infinite blocks of graphite, the first two layers of which are shown here. (b) Virtual Porous Carbon model where the non-crystalline structure of nanoporous carbon is captured from the molecular scale upwards. Carbon atoms are grey and interstitial fluid molecules blue.
(b)
pore surfacesh
(a)Fig. 1. Two main classes of model used for nanoporous carbons: (a) Slit-pore model where a pore of width h is defined by the basal surfaces of two opposing semi-infinite blocks of graphite, the first two layers of which are shown here. (b) Virtual Porous Carbon model where the non-crystalline structure of nanoporous carbon is captured from the molecular scale upwards. Carbon atoms are grey and interstitial fluid molecules blue.
(b)
pore surfacesh
(a)

More recently, ‘bottom-up’ reconstruction approaches17-24 have been developed in which an initial model structure is iteratively evolved until it matches experimentally-determined atomic-level characteristics of the target nanoporous carbon (e.g. carbon-carbon radial distribution function). Unfortunately, as reconstruction is an inverse approach, Virtual Porous Carbon models obtained via this route are not guaranteed to be unique: many models will satisfy the same experimental data, most being physically incorrect (e.g. Thomson & Gubbins18 obtained unlikely bond angles), some not obviously so.
The third broad approach to building Virtual Porous Carbons is the mimetic route, which seeks to build models by mimicking the synthesis process. This approach has long been used in the amorphous carbon field25 where the general absence of order makes it well suited. However, it has only been recently applied in the nanoporous carbon field.26-29 Whilst the mimetic approach can in principle produce unique models of a target carbon, they will only produce the correct model if the essentials of the synthesis process are captured correctly. This is currently extremely difficult to do for most production methods because the level of detailed understanding of the synthesis processes is still poor – this is certainly true for carbons produced by the pyrolysis of solid precursors which is of particular interest here.
All current Virtual Porous Carbon models either entirely omit or, at best, treat superficially19,21,23,24 the non-carbon atoms that are found both within the carbon skeleton and as functional groups on the pore surfaces of many nanoporous carbons. Apart from implications for the correctness of the Virtual Porous Carbons, the absence of heteroatoms means effects arising from them such as adsorption of polar fluids (e.g. water) and charged species (e.g. Li ion),30 and heterogeneous reaction involved in catalysis31 and ‘spillover’ during hydrogen storage9 cannot be considered.
Except for those models based on mesoscale building blocks,15,27 the volumes of many current Virtual Porous Carbons models are limited to a few nm3. The origin of this limitation is essentially computational – most of the current algorithms require calculation of the interactions between the solid atoms, a computationally intensive process whose expense grows directly with the model size. The current small volumes of many of the Virtual Porous Carbon models limits their usefulness when interest lies in phenomena arising from the mesoporosity often found in nanoporous carbons (e.g. capillary condensation32) and the wider pore system topology such as fluid transport within carbons.13
C3 Significance and Innovation C3.1 Significance The need to develop more sustainable technology is unprecedented The rise in the World’s population to 9 billions by 205033 will lead to a doubling in World energy demand.34 The massive increase in carbon dioxide (CO2) emissions entailed by this growth if ‘business as usual’ continues has lead learned-bodies1,2 to argue that the switch to more sustainable technologies is one of Humanity’s top ‘Grand Challenges’. These calls are motivated by the growing body of evidence that suggests the World will become much less hospitable unless something is done. For example, the 150,000 annual deaths currently attributed to global climate change is set to double by 203035 as more extreme weather events occur,36 food37 and water38 become more scarce, and conditions become more favourable for spread of disease.39 Australia is not immune to these and other consequences of global climate change.40 Nanoporous carbons are playing an increasingly significant role in sustainable technology Examples of the use or potential use of nanoporous carbons to address major sustainable technology-related challenges are given here to demonstrate the current or potential significance of these materials. Major issues in each application are also provided – the next section will demonstrate how the proposed research will broadly address these issues.
It is proposed to develop and demonstrate a new Virtual Porous Carbon model that accurately includes heteroatoms and spans from the atomic to the mesoscale, thereby lifting the capacity to use molecular modelling to develop nanoporous carbon-based sustainable technologies up to the level currently enjoyed by zeolites.
Hydrogen Storage Hydrogen (H2) is the ‘holy grail’ of fuels. There are, however, major barriers to its use as a fuel. One is storage – unlike many traditional fuels, H2 cannot be stored as a liquid at normal conditions. Instead, its temperature must be dropped below −253°C before it liquefies. This process is unattractive for routine storage of H2 as a fuel, as it requires one-third of the energy stored. A major alternative that has received considerable attention is storage of H2 by sorption on nanoporous carbons.41 However, like all the other alternatives, further fundamental research and development work is required before nanoporous carbons achieve the required capacity and charge/discharge rates.
Natural Gas Storage As the cleanest and most plentiful of all hydrocarbon fuels, natural gas is seeing increased take-up as a transport fuel in countries where it is readily available (e.g. Australia). Unfortunately, unlike most other hydrocarbon fuels, it is not a liquid at normal conditions. The current storage method is to compress the natural gas to 200-250 atmospheres. Unfortunately, this approach is expensive both in terms of energy and capital costs. Nanoporous carbons have been developed that can store methane at levels competitive with compressed natural gas but at just 35 atmospheres.42 Unfortunately, these carbons currently face problems around the rate at which the gas can be charged & recovered.42

The proposed research will enable the full potential of nanoporous carbons in sustainable technology to be realised Nanoporous carbons have real potential in the above sustainable technologies. However, the issues mentioned above for each of these technologies (and other technologies as well) must be resolved before this potential is more fully realised. The new Virtual Porous Carbons model to be developed here can be used in at least two ways to address these issues.
The first exploits fundamental understanding derived using the model to inform design. For example, by using Monte Carlo simulation of H2 sorption within a Virtual Porous Carbon model of a carbon, greater fundamental insight into this process, including the much-debated H2 spillover, can be obtained and subsequently exploited to develop better carbons.
A more powerful use of the proposed Virtual Porous Carbon model to eliminate the barriers to fuller exploitation of carbons in sustainable technologies is shown in Fig. 2. Briefly, the experimental characteristics of a base carbon (B-NPC),
, are used to construct a corresponding Virtual Porous Carbon model (B-VPC), . This B-VPC is then subject to a computer-based (i.e. in silico) mimicry of the potential carbon post-processing (e.g. metal impregnation) to obtain a new Virtual Porous Carbon model (N-VPC), , whose performance is estimated and compared with what is required, . The methods used to estimate performance depend on the phenomena of interest (e.g. if H2 adsorption capacity is of interest, a Monte-Carlo simulation with suitable potential is used). If the estimated performance does not met expectations, the B-VPC (or N-VPC) model is subject to further in silico post-processing until it meets expectations (loop A). Once the N-VPC performance meets expectations, the new nanoporous carbon (N-NPC) is synthesised, , by subjecting the B-NPC to the processes suggested by the post-processing mimicked in silico. This N-NPC is then tested and assessed to see if it does meets expectations, . If it does not, this suggests the in silico post-processing model does not match reality and some modification of the former (dashed line from back to in silico post-processing unit) must be made; the frequency of such mismatches should diminish with time as experience of modelling the carbon post-processing is accumulated.
Both of the above routes to exploiting Virtual Porous Carbon models will be used here to address the various barriers to fuller exploitation of nanoporous carbons in hydrogen storage and carbon dioxide capture. This will lead to significant new fundamental understanding of the processes that accompany these applications as well as new materials.
Batteries and Supercapacitors for Hybrid Vehicles and Storage of Energy from Intermittent Sources Nanoporous carbons have been used for some time now as the anode material in Li-ion batteries.5 As these offer the highest energy densities of all current mainstream battery technologies, they have been selected by many auto makers for their next generation of hybrid vehicles.6 They along with related supercapacitor technologies are also set to play an increasing role in the storage of energy from intermittent sources such as wind and solar.43 Despite this success, much higher recoverable energy densities are desirable7 so as to reduce the power-to-weight ratio of hybrid vehicles and increase their range, and to reduce costs of energy storage infrastructure in the electrical grid.
Carbon Dioxide Capture The capture of carbon dioxide (CO2) from coal combustion exhaust gases is now considered an imperative by Australia and other countries that derive significant wealth or energy from coal. The traditional method for recovering CO2 – ‘scrubbing’ using an amine solution – requires about 25% of the energy produced by the combustion process. There are, therefore, considerable efforts underway to develop the use of nanoporous materials to capture CO2.8 Whilst nanoporous carbons have shown great promise in this context, there is still a need to increase the CO2 selectivity of the carbons for typical exhaust gas compositions and temperatures.
Fig. 2. Exploitation of new Virtual Porous Carbon (VPC) model to develop a new nanoporous carbon (N-NPC) starting from a base nanoporous carbon (B-NPC).
StartBase nanoporouscarbon (B-NPC)
Experimentalcharacterization
Meetsneeds?
in silicoperformance
testing
in silico carbonpost-processing
Characteristics of B-NPC
Virtual PorousCarbon (VPC)
model algorithm
VPC modelof B-NPC(B-VPC)
New VPC model
(N-VPC)
New NPC(N-NPC)
Nanoporouscarbon synthesis
Meetsneeds?
Experimentaltesting
New, betterNPC
Yes
NoNoYes
1
2
3
4
5
6
loop A
Fig. 2. Exploitation of new Virtual Porous Carbon (VPC) model to develop a new nanoporous carbon (N-NPC) starting from a base nanoporous carbon (B-NPC).
StartBase nanoporouscarbon (B-NPC)
Experimentalcharacterization
Meetsneeds?
in silicoperformance
testing
in silico carbonpost-processing
Characteristics of B-NPC
Virtual PorousCarbon (VPC)
model algorithm
VPC modelof B-NPC(B-VPC)
New VPC model
(N-VPC)
New NPC(N-NPC)
Nanoporouscarbon synthesis
Meetsneeds?
Experimentaltesting
New, betterNPC
Yes
NoNoYes
1
2
3
4
5
6
loop A

The proposed work meets six National Priority Goals The proposed research meets the following national priority goals in the indicated National Research Priorities (NRPs):
Reducing & capturing emissions in transport and energy generation (NRP 1). As the four examples above illustrate, the new Virtual Porous Carbon model will provide the basis for addressing this national priority goal in a myriad of ways. It will, for example, provide the basis for developing improved Li-ion batteries, which are set to be used in the next generation of hybrid vehicles and are likely to play an increasing role in the electrical grid as more energy is derived from intermittent renewable sources like solar. The work proposed around applying the new Virtual Porous Carbon model to develop improved carbons for CO2 capture and H2 storage are more direct contributions to this priority goal.
Transforming Existing Industries (NRP 1). The resources sector is being pushed to derive more of its energy from sustainable sources. In this sense, the aspects of the proposed research that are relevant to the first national priority goal are also relevant to this second goal. However, the new Virtual Porous Carbon model can also be used more widely – for example, it can be used to identify the potential active sites of nanoporous carbon-based catalysts, which is currently extremely difficult to do with a high degree of certainty due to the complexity of the pore space of nanoporous carbon.
Water – a Critical Resource (NRP 1). Nanoporous solids have long been used in water and wastewater treatment. Whilst this technology is generally mature, there is still a need to develop carbons that can better isolate the rising number of water-borne pollutants, especially those of a biomolecular origin such as hormones.
Breakthrough science (NRP 3). Particularly through the inclusion of heteroatoms, the new Virtual Porous Carbon model will lay the foundations for improving fundamental understanding of a range of processes that occur within nanoporous carbons such as H2 spillover during its adsorption on metal-impregnated carbons. It is anticipated that this particular phenomenon along with others relevant to H2 and CO2 adsorption will be specifically elucidated here.
Advanced materials (NRP 3). The new Virtual porous model will allow the development of new materials as will be demonstrated here in the contexts of hydrogen storage and carbon dioxide capture. The model is, however, of wider relevance in the advanced materials development context – for example, carbons are used in the bioprocessing context.
Protecting Australia from terrorism and crime (NRP 4). The new model will allow development of more effective media for defence against chemical warfare agents and improving understanding of ‘aging’ of such media.
C3.2 Innovation Innovative methodological developments
First ever attempt to rigorously incorporate heteroatoms and the mesostructure – which are ubiquitous in nanoporous carbons – within Virtual Porous Carbon models.
First ever use of multiple complementary and overlapping experimental data to improve in a general way both the correctness and uniqueness of Virtual Porous Carbon models obtained via reconstruction.
The novel combination of the graph representation of the carbon structure (from the drug design community)44 with the method of Svergun et al. 45 (from the biophysics community) will allow efficient treatment of the multiple lengthscales.
First ever attempt to use Virtual Porous Carbon models in the design context viz. the process expressed in Fig. 2. The models and algorithms that mimic various processes for modifying the nanoporous carbon pore surfaces and sizes.
Innovative technologies to be developed It is the intention in work package 3 to develop a new nanoporous carbon-based hydrogen storage medium that will possess a capacity superior to existing nanoporous carbon based technology (see §C4.2. below).
It is intended in work package 3 to develop a new nanoporous carbon that possesses a carbon dioxide selectivity from post-combustion exhaust gas streams that is superior to current carbon-based technologies (see §C4.2. below).
Major contributions to the body of knowledge Improved understanding of H2 adsorption, including the much-debated H2 spillover, on nanoporous carbons as a function of the thermodynamic conditions and pore surface character.
Improved understanding of CO2 adsorption as a function of the thermodynamic conditions and pore surface character. A unique comprehensive set of experimental characteristics of a single carbon.
The proposed research also addresses three National Innovation Priorities High-quality research that addresses national challenges and opens up new opportunities. The proposed research will develop a model that can then be exploited to addresses major challenges within six national priority goals.
Development of Australia’s skilled researcher base to support the national research effort. This research will lead to the development of three researchers in brining cutting edge experimental methods and molecular modelling to bear on some of the most pressing problems that Australia and the World face.
More international collaborations. The proposed research brings together four world-recognised teams from Australia, Spain and Japan that will lead to migration of know-how to Australia and building of long-term international links.

C4 Approach and Methodology C4.1 Outline of new Virtual Porous Carbon modelling approach to be developed Overview of methodology for including heteroatoms and mesoscale The mimetic approach to building Virtual Porous Carbon models has the attraction that the models are unique and linked to the synthesis process. However, at least for carbons derived from solid precursors such as wood and polymers, the current understanding of the synthesis process at the atomic level is insufficiently developed to be able to use the mimetic approach to build accurate Virtual Porous Carbon models derived from such precursors. We will, therefore, adopt a bottom-up reconstruction approach and seek to minimise the uniqueness issue through developments outlined below.
In the bottom-up reconstruction approaches,17-24 an initial model structure is iteratively evolved, to of Fig. 3, until it matches experimentally-determined molecular-level characteristics of the target nanoporous carbon, (e.g. the solid skeleton density and carbon-carbon radial distribution function). Iteration in this evolution process involves:
determine the model’s counterparts of the target carbon’s experimental characteristics from , then
evaluate the difference between the experimental characteristics and their model counterparts, then
if the difference between the model and experimental characteristics is acceptable, the model building simulation stops, else
the model building simulation continues by changing the model (e.g. inserting/deleting atoms) before return to . Reconstruction approaches to date have exploited just a
few experimental data such as the carbon skeleton density obtained from, for example, helium pycnometry, and the C-C radial distribution function obtained from X-ray diffraction. It is proposed here to increase substantially the input experimental data used in the reconstruction, as this provides:
a direct route to exploiting experimental data that relates to the mesostructure of the nanoporous carbon such as that captured by small angle X-ray scattering and analysis of high resolution transmission electron micrographs;
a direct route to exploiting experimental data that relates to the chemical and chemico-structural details of the nanoporous carbon such as that captured by ultimate analysis and X-ray photoelectron spectroscopy respectively; and
a more general approach to improving the correctness and uniqueness of the models as the differences between the data provide multiple, complementary information whilst overlaps provide constraints.
The first and second of these, combined with the algorithmic developments outlined in the next subsection, allow rigorous inclusion of the heteroatoms and spanning of the structure from the atomic to the mesoscale. The last of these benefits of using multiple input experimental data potentially removes the need to use, as is commonly practised in reconstruction, local potential energy penalty functions to ensure the C-C bonds are physically reasonable. This has the benefit of removing a computational expensive operation that scales with the size of the model. It is also a more general approach to addressing the uniqueness issue associated with reconstruction, as it addresses all aspects of the model, not just the structural, and it caters for those situations where potential energy penalties may not be appropriate.22
Details of reconstruction algorithm to be developed Use of multiple experimental data requires a multiobjective reconstruction algorithm that minimizes the vector objective function ( ) ( ) ( ) ( )( )1 2, , , Nf f f=f x x x x… (1)
subject to appropriate constraints, where x is a vector which expresses the Virtual Porous Carbon model in its entirety (e.g. the coordinates and species of its atoms), and the fi(x) are objective functions that express the difference between the Virtual Porous Carbon model and the target carbon for the characteristics used. The RDF obtained from XRD is one of the most common characteristics used in reconstruction, but a few examples of other possible experimentally-derived characteristics yet to be used are the ratio of number of sp2 to sp3 bonds and dangling bond concentrations.
There are many ways in which the multiobjective problem as expressed in equation (1) can be solved. One is to transform the problem into a problem of minimizing an overall scalar objective function
1
Ni
i i
f=
Ψ =Λ∑ (2)
Fig. 3. Flow diagram of reconstruction approach to building Virtual Porous Carbon (VPC) models.
Nanoporous carbon VPC
No
StopYes
in silicocomparison
2
Nanoporous carboncharacteristics
VPCcharacteristics
VPCchanged4
in silicocharacterization
Experimentalcharacterization
5
Difference< tolerance?
1
3
Soft
war
e
Fig. 3. Flow diagram of reconstruction approach to building Virtual Porous Carbon (VPC) models.
Nanoporous carbon VPC
No
StopYes
in silicocomparison
2
Nanoporous carboncharacteristics
VPCcharacteristics
VPCchanged4
in silicocharacterization
Experimentalcharacterization
5
Difference< tolerance?
1
3
Soft
war
e

where Λi are weights whose ratios dictate the relative importance of fi(x) in the fit. This approach has been used in all reconstruction work to date, with the ratio of weights being fixed at values determined through a priori trial-and-error. This is far from optimal when N is not small because of both the expense involved in determining the ratio of weights and their lack of variability during reconstruction. We propose, therefore, to solve the more general problem of eq. (1), which will lead to multiple Virtual Porous Carbon models that ‘equally’ satisfy the experimental data in a Pareto sense.46
Except for the simplest models, stochastic methods are the only viable means of solving equations (1) and (2) in the reconstruction context. The most common of these is Reverse Monte Carlo (RMC).47 Some19 have used simulated annealing (SA) with RMC to overcome the latter’s tendency to become trapped in local minima. Direct use of this approach here is unlikely to prove successful, however, because of both the large size of the objective function vector and our intention to use experimental data from the atomic to the mesoscale – a parallel generalized multiobjective approach is required. We propose to use a parallel multiobjective evolutionary algorithm (EA)46 as the experience of ourselves48 and others49 suggest this is likely to be more efficient because it naturally encapsulates learning in parallel (indeed, better parallel SA methods are really hybrid SA-EAs50) and it provides a basis for fitting multiscale data simultaneously through use of a graph representation44 of the carbon in conjunction with on-the-fly calculation of form factors45 over sub-graphs – this is key to efficiently capturing nanoporous carbon structures from the atomic to mesoscale in a single model. Details of experimental data to be used in the reconstruction Many methods can be used to characterize nanoporous carbons.51 The data from these can be divided into six categories: Cat. 1S: Those that give non-local (i.e. sample-wide) quantitative data usable in reconstruction such as X-ray diffraction (XRD), which gives heavy-atom pair correlation function for macroscopic volumes. Cat. 1L: Those that give ‘local’ (i.e. small volume/area) quantitative data usable in reconstruction such as small area electron diffraction (SAED), which yields data similar to XRD for nanoscale areas. Cat. 2S: Those that give non-local qualitative data that can guide building block selection in reconstruct-ion and be used in qualitative assessment of Virtual Porous Carbon models like infra-red (IR) spectroscopy. Cat. 2L: Those that give local qualitative data that guides building block selection in reconstruction and that can be used in qualitative assess Virtual Porous Carbon models; e.g. high resolution transmission electron microscopy (HRTEM) images. Cat. 3L: Those that give local quantitative data not usable in reconstruction due to computational expense but that can be used to assess Virtual Porous Carbon models; e.g image analysis of HRTEM images. Cat. 3S: Those that give non-local quantitative data not usable in reconstruction due to computational expense but which can be used to assess Virtual Porous Carbon models; e.g. adsorption and diffusion. It is proposed to use data from all these categories as: (1) category 3 data provides a useful basis for assessing the Virtual Porous Carbon models; (2) the same nominal characteristics at the local and bulk levels allow assessment of sample heterogeneity, and (3) the same nominal data from multiple methods allow identification of inconsistencies in the data.
C4.2 Details of programme of work The research is composed of 3 work packages (WPs). Details of these and the materials follow the timeline in Fig. 4. Task WP Year 1 Year 2 Year 3 Develop new reconstruction algorithm and close-loop test 1 Optimise new reconstruction algorithm and open-loop test 1 Carbon synthesis and undertake basic characterisation 2 Fuller characterisation of carbon (A=Alicante; C=Chiba) 2 A C Develop in silico mimicry of carbon post-processing 3 Demonstrate new reconstruction algorithm: CO2 capture 3 Demonstrate new reconstruction algorithm: H2 storage 3
Fig. 4. Timeline showing main tasks described in detail below and primary research staff undertaking each. Base Nanoporous Carbon The approach to be developed will in principle be applicable to any solid. We will, however, focus on carbons derived from a single polyfurfuryl alcohol (PFA) precursor. A polymer precursor has been selected because it: (1) provides a means of precisely controlling the precursor make-up, thus aiding the minimisation of variability between and within batches of carbons, which inturn minimises uncertainty in the experimental data whilst maximizing reproducibility; (2) limits the number of chemical species to a modest level (our carbons will contain C, H, N, S and O only) and avoids inorganic species common to many natural precursors, both of which will ease the proposed developments by minimizing the challenges faced in interpretation and exploitation of the experimental data; (3) it includes nitrogen, which appears to play an important role in CO2 capture; and (4) polymers form the basis of many high-value nanoporous carbons, which are an obvious class of carbons that would be the target for the methods to be developed here. PFA based nanoporous carbons has been selected in particular here due to its relative popularity, and it being the subject of some previous Virtual Porous Carbon modelling work (e.g. refs. 17, 26), albeit not the most advanced.
RAAU PhDSA
PhDSA
PhDAU, RAUA, PhDSAPhDUA, RAUA, PhDSA
RAAU
PhDAU PhDAU
RAAU

Typical of the wider carbon literature, almost every published experimental study of PFA-based nanoporous carbon adopts to a greater or lesser extent a different process for synthesising the PFA and, subsequently, the carbon. The well-established approach of Moreno-Castilla et al.52 will be used here to form the (catalyst free) base target carbon. Particulate PFA precursor sieved to a near-uniform size of ~500 μm will be used so as to aid minimisation of the variability within batches of the carbon produced. Batches of the carbon will be produced under carefully controlled and monitored conditions to minimise variability both within and between the batches. Carbonization of the beads will be done in N2 at a rate of 10 K/min to 1173 K, which takes the material beyond the point where major structural transformations are expected, before soaking for 1 hr. The nanoporous carbon will be produced by CO2 activation of the carbonized beads at 1173K. This synthesis work and its characterization (using TGA/EG/DTA) will be undertaken by the UniSA-based PhD student (PhDSA) under the supervision of CI Pendleton. Existing and new apparatus purchased under the recently awarded LIEF grant LE100100001 will be exploited in this phase of the work. WP 1: Development of reconstruction algorithm that uses multiple structural and chemical data This WP, to be undertaken by the Adelaide-based RA (RAAU) under the supervision of CI Biggs, is primarily concerned with the design and implementation of the multiobjective reconstruction algorithm described in §C4.1 above. This will involve implementation of the algorithm in software and subsequent testing to ensure the algorithm is bug-free and that it is producing Virtual Porous Carbon models that are representative of the target nanoporous carbon.
The reconstruction algorithm and the code implementing it will be tested and optimised using the closed-loop testing methodology illustrated in Fig. 5. Briefly, the algorithm will be applied to the reconstruction of Virtual Porous Carbon models using in silico determined ‘experimental data’, , obtained from a model nanoporous carbon generated via simulation. Because the characteristics of the target carbon are known exactly, this form of testing avoids the uncertainties attached to use of a real carbon such as experimental error and ambiguities in experimental data interpretation, and makes it far easier to identify, , and remedy, , failure of the reconstruction algorithm or its implementation in code. Also using the closed-loop testing of Fig. 5, in a similar vein to Badalyan & Pendleton,56 an assessment of the sensitivity of the reconstruction approach to variations in the experimental data will be undertaken so as to better understand those characteristics that are most suitable for reconstruction and to determine the degree of uncertainty in predicted Category 3 data. This will be done by introducing errors into the model carbon characteristics of the closed loop test in a controlled fashion and studying the resultant changes in the Virtual Porous Carbon generated and the associated Cat. 3 characteristics.
Once it has been established through the closed loop testing that the reconstruction algorithm and code is functioning, open-loop testing as illustrated in Fig. 6 will be undertaken using the Category 3 experimental data indicated in Table 1 below as input (i.e. adsorption isotherms; heats of adsorption; diffusion coefficients; statistics derived from HRTEM micrographs). The adsorption and diffusion behaviour of the Virtual Porous Carbons will be determined using Monte-Carlo (MC) and molecular dynamics (MD) simulations,57 whilst the method of Pikunic et al.19 will be used to generate simulated HRTEM micrographs of the carbons. Failure to obtain a match between the experimental data and predictions derived from the Virtual Porous Carbon model in the open-loop test will be analysed to identify the underlying cause and remedial action taken. Possible underlying reasons for failure in the open-loop test include inadequacies in the model-based predictions (e.g. fault in the energy function in MC/MD), conflicts in the experimental data (which may manifest as models consistently mis-matching different data for nominally related characteristics),
Reconstruction algorithm being assessed.
Model carbonfrom simulation
Virtual Porous Carbon
Model carboncharacteristics
in silicocharacterization
13
?
2
Fig. 5. Schematic of closed-loop test methodology to be used to assess the new reconstruction approach during its development.
Reconstruction algorithm being assessed.
Model carbonfrom simulation
Virtual Porous Carbon
Model carboncharacteristics
in silicocharacterization
13
?
2
Fig. 5. Schematic of closed-loop test methodology to be used to assess the new reconstruction approach during its development.
Fig. 6. Schematic of open-loop test methodology to be used to assess the new reconstruction approach during its development.
Nan
opor
ous c
arbo
n (N
PC)
Experimentalcharacterization
MD, MC andTEM simulation
Category 3 characteristics
of NPC
Category 3 characteristics
of VPC? 1
2
Virtual PorousCarbon (VPC)
Category 1 characteristics
of NPC
Reconstruction algorithm being assessed.
Fig. 6. Schematic of open-loop test methodology to be used to assess the new reconstruction approach during its development.
Nan
opor
ous c
arbo
n (N
PC)
Experimentalcharacterization
MD, MC andTEM simulation
Category 3 characteristics
of NPC
Category 3 characteristics
of VPC? 1
2
Virtual PorousCarbon (VPC)
Category 1 characteristics
of NPC
Reconstruction algorithm being assessed.

and inadequate interpretation of the experimental data. Evidence20,53 suggests that the final structures obtained from current reconstruction approaches may well be sensitive to
the initial configuration. Some20,22 have attempted to address this problem by rationally defining the initial structure using additional experimental data. We anticipate that by using data from a range of complementary and overlapping experimental methods combined with a more intelligent algorithm (EA vs. SA) that there will be less dependence on the initial configuration. This will be investigated by comparing through suitable (e.g. ring) statistics the final Virtual Porous Carbon model structures obtained from different initial configurations as a function of the EA settings. WP 2: Experimental characterization of target carbons It is proposed to at least use here the characteristics of Table 1 below. The category 1 data will be used to define the fi(x) in eq. (1). For example, the fue(x) = Aue [ρue (VPC) − ρue (NPC)]2 would be the objective function used to drive the unpaired electron density in the Virtual Porous Carbon, ρue (VPC), towards that of the nanoporous carbon, ρue (NPC), where the former is evaluated following, for example, Lewis and Singer.54
Although some of the characteristics in Table 1 have been published for PFA-based carbons, there is not a complete set for a single carbon. Sets of data derived from a single origin are highly desirable in the current context as they minimize uncertainty in the experimental inputs to the reconstruction algorithm, which in turn minimizes this as a potential source of failure of models derived from the algorithm. This allows our efforts in the open-loop testing to be focused on investigating the algorithm and the use of the experimental data. It is, therefore, proposed that the characteristics identified in Table 1 be determined here for the base carbon described above. This will be done by the UniSA-based PhD (PhDSA) under the primary supervision of the CI Pendleton in collaboration with the two PIs using either in-house facilities (adsorption, He pycnometry, TGA/EGA/DTA, UA) or those accessible through various local facilities (EELS, SAED, XRD, HRTEM, SEM, 13C NMR, Raman) and national facilities (SAED, XRD, SAXS, ND, SANS, HRTEM, SEM, SA-SAXS, IR) such as such as the AMMRF and ANSTO, and the facilities of the PIs (ESR, titration/TPD, magnetic susceptibility, electrical conductivity).
Table 1. Experimental methods to be used, data obtained using them, and their category. Method Characteristics Categorya Raman spectroscopy Ratio of C5/C6 & C7/C6 rings; ratio of sp2 to sp3-C; fraction of H 1L SAED Heavy-atom structure factor and radial distribution function. 1L XRD/SAXS Heavy-atom structure factor and radial distribution function. 1S ND/SANS All-atom structure factor and radial distribution function. 1S EELS Ratio of sp2-C to sp3-C. 1L HRTEM/SEM Micrographs/quantities from image analysisb. 2/3L TGA/EGA/DTA Chemical/structural evolution and associated reactions. 2S He pycnometry Carbon skeleton density. 1S ESR Charge-carrier density; localised unpaired-electron density. 1S Magnetic susceptibility Charge carrier density; localised unpaired-electron density. 1S 13C NMR Ratio of sp2-C to sp3-C; ratio of sp2-CH to sp3-CH. 1S Small area XPS Fraction of each element in O-, C-, N- and S- functional groups. 1L Titration/TPD O- and N-containing functional groups on the pore surfaces. 1S Infrared (IR) Functional groups. 2S Adsorptionc Adsorption & heats of adsorption vs. (p, T). 3S Diffusion Diffusion coefficients vs. (p, T) 3S Ultimate analysis (UA) Fraction of each element (H, C, O, N and S here). 1S a. See §C4.1 for the definition of categories. b. Image analysis as per Shim et al.55 c. Adsorbtives of increasing size, shape and polarity will be considered to probe local pore geometry, connectivity and topology of polar sites.
Whilst the second CI has much experience with nanoporous carbon synthesis and application of adsorption, electron microscopy, SAED, XRD and ultimate analysis in the carbon context, he has much less experience with many of the other techniques listed in Table 1. It is for this reason that we have sought to involve Prof. Rodríguez-Reinoso (FRR) and Prof. Kaneko (KK), who have expertise in many of the above methods as outlined in §E.1 below. The UniSA-based PhD will, therefore, spend 3 months in the each of the PIs labs so as to learn and practise those methods for which kit is available in Australia, and to also use those methods which are not readily accessible here (ESR; magnetic susceptibility; electrical conductivity; titration/TPD). WP 3: Demonstrating the potential of the new Virtual Porous Carbon model The potential of the new Virtual Porous Carbon model to aid the development of greater fundamental understanding and sustainable technologies will be demonstrated by considering adsorption of CO2 from a multicomponent synthetic post-combustion exhaust gas mixture and pure H2 on nanoporous carbon with a view to developing new, improved carbons for these two important sustainable technologies.

The initial 18 months of this WP will involve the Adelaide-based PhD (PhDAU) developing the capacity to model adsorption of N2, CO2, H2O and H2 on molecular models of nanoporous carbons. Although it is recognised that the slit pore model is simplistic, it will initially be used to train PhDAU in Monte-Carlo (MC) simulation of single component and multicomponent adsorption57 of these species. The student will consider adsorption on the standard slit pore model as well as those decorated with N- and O-containing functional groups and Pt guest atoms. In addition to becoming conversant with the basics of MC simulation and its coding, PhDAU will also learn about how to best model the various vapour species where dipole and quadrupole moments58 and quantum effects59 are important, and the interactions between these and the N- and O-containing functional groups. The latter will initially be modelled using the Amber potential energy model parameters but this will be assessed by RAAU as part of their contribution to WP3. This will be done by comparing energies predicted using Amber with those obtained from first-principles calculations.60
In the first few months of the second half of this WP, the PhDAU will consider pure CO2 and H2 adsorption on the Virtual Porous Carbon model of the base carbon so as to build confidence in their use of the more complex model and build better fundamental understanding of the these adsorption processes within real carbons. They will then join with RAAU and PhDSA for the remainder of the project to use the process illustrated in Fig. 2 to develop new, improved nanoporous carbons for CO2 capture from coal post-combustion exhaust gas and storage of H2. The details are:
For CO2 capture, adsorption of a synthetic coal post-combustion exhaust gas mixtures containing CO2, N2 & H2O will be modelled and the CO2 selectivity determined as a function of the nature and concentration of nitrogen functional groups on the pore surface, and the temperature and pressure. The pore surfaces of the Virtual Porous Carbon model will be varied by mimicking the hot ammonia process described in Pevida et al.8 RAAU will develop the model that mimics this process: this will involve use of first principles calculations to evaluate the reactivity of the various pore surface sites61 in the Virtual Porous Carbon to ammonia and the use of this data in a Monte Carlo simulation that involves stochastic replacement of the surface sites with N-groups derived from ammonia62 (see Pevida et al.8 and references therein for details of these). PhDSA will synthesis and test the final carbon and compare its performance against that predicted by the Virtual Porous Carbon modelling and the best available in the literature.
In the case of H2 storage, adsorption of pure hydrogen will be modelled and the capacity and thermodynamics will be determined as a function of the nature of surface, particular with regards oxygen groups and the presence of metals, and the temperature and pressure. The pore surfaces of the Virtual Porous Carbon model will be varied by mimicking the O-plasma and Pt-impregnation processes used by Yang and co-workers;9,61 once again, RAAU will develop the algorithm that mimics these process, and PhDSA will synthesis and test the final carbon and compare its performance against that predicted by the Virtual Porous Carbon modelling and the best available in the literature.
C5 National Benefit The techniques and experience to be developed as a result of the proposed research will lay the foundations for addressing several key issues for Australia as reflected by the six national priority goals the work is relevant to (see §C3.1). In particular, once developed and demonstrated, the new Virtual Porous Carbon model can be exploited to develop new nanoporous carbons that meet the Nation’s needs such as more sustainable energy and process technologies, improved water treatment technologies, and better media for protection against chemical warfare agents and other harmful vapours. The cutting-edge and exciting nature of the proposed developments – particularly around brining advanced molecular modelling methods to bear on practical problems of real importance – and the engagement with arguable the two foremost experts in of the carbon field means the work setting will be an excellent training ground for the three young researchers involved. The research will also facilitate the establishment of international collaborations with World-leading experts in the carbon field, transferring to Australia some of this expertise and know-how for the Nation’s longer-term benefit. C6 Communication of Results Publications in journals such as Carbon and Langmuir will be prepared on the work. We will also present the work at the International Carbon (2012) and Fundamentals of Adsorption (2013) conferences as well as the local Chemeca meetings. Relevant results will also be mounted on a project-specific webpage. Finally, we will look to exploit in collaboration with industry the tools and know-how to be developed here; the CIs and PIs all have excellent links with relevant industry. C7 Role of Personnel Prof. Biggs will provide overall intellectual direction, leadership and management of the proposed programme. He will play similar roles in the theoretical aspects of the programme. This will involve direct supervision of RAUA. A/Prof. Pendleton will provide intellectual direction, leadership and management of the experimental aspects of the programme. This will involve direct supervision of PhDSA. The PIs will contribute to the overall intellectual development of the research and, along with their own research staff, will be responsible for supervision and training PhDSA when visiting their labs. Their research staff will also undertake the experimental characterisation work that PhDSA is not able to due to time constraints or lack of access to facilities. The CIs and PIs will contribute to the dissemination of the work.
The broad contributions of the requested research staff and students are indicated in the timeline in Fig. 4. More specifically: RAUA will be responsible for developing and testing the reconstruction algorithm (WP1) and the in silico

process module (WP3), and supervising PhDAU on a day-to-day basis. PhDSA will be responsible for synthesising and characterising the base carbon (WP2) and the new carbons to be developed for CO2 capture and H2 storage (WP3). This will involve learning the experimental techniques they are not familiar with, which will in part be undertaken in the labs of PI Rodríguez-Reinoso and PI Kaneko. PhDAU will be responsible for the modelling work around the development of the carbons for CO2 capture and H2 storage (WP3). C8 References 1. Omenn GS. Science 314:1696, 2006. 2. Ellis G. Chem. Eng. Prog. 104(4):11, 2008. 3. Nanoscience Research for Energy Needs, US Department of Energy, 2004. At sc.doe.gov/bes/reports (accessed 25 Jan 2010). 4. Thomas JM; Raja R. Annu. Rev. Mater. Res. 35:315, 2005. 5. Endo M; Kim C; Nishimura K; Fujino T; Miyashita K. Carbon 38:183, 2000. 6. Voelcker J. Lithium Batteries for Hybrid Cars, 2007. At spectrum.ieee.org/green-tech/advanced-cars/lithium-batteries-for-hybrid-cars
(accessed 25 Jan 2010). 7. New Science for a Secure & Sustainable Energy Future. US Department of Energy, 2008. At sc.doe.gov/bes/reports (accessed 25 Jan 2010). 8. Pevida C; Plaza MG; Arias B; Fermoso AJ; Rubiera F; Pis J.J., Appl. Surf. Sci. 254:7165, 2008. 9. Wang L; Yang RT. J. Phys. Chem. C 113:21883, 2009. 10. Basic Research Needs for the Hydrogen Economy. US Department of Energy, 2004. At sc.doe.gov/bes/reports (accessed 25 Jan 2010). 11. Bhatia SK. Langmuir 18:6845, 2002. 12. Kaneko K; Ishii C; Ruike M; Kuwabara H. Carbon 30:1075, 1992. 13. Seaton NA; Friedman SP; MacElroy JMD; Murphy BJ. Langmuir 13:1199, 1997. 14. Biggs MJ; Buts A. Mol. Sim. 32:579, 2006. 15. Biggs M; Agarwal P. Phys. Rev. A 46:3312, 1992. 16. Segarra EI; Glandt E.D. Chem. Engng. Sci. 49:2953, 1994. 17. Petkov V; DiFrancesco, RG; Billinge SJL; Acharya M; Foley HC. Phil. Mag. B79:1519, 1999. 18. Thomson KT; Gubbins KE. Langmuir 16:5761, 2000. 19. Pikunic J; Clinard C; Cohaut N; Gubbins KE; Guet JM; Pellenq RJM et al. Langmuir 19:8563, 2003. 20. Zetterström P; Urbonaite S; Lindberg F; Delaplane RG; Leis J; Svensson G. Phys.: Condens. Matter 17:3509, 2005. 21. Jain SK; Gubbins KE; Pellenq RJM; Pikunic JP. Carbon 44:2445, 2006. 22. Nguyen TX; Cohaut N; Bae JS; Bhatia SK. Langmuir 24:7912, 2008. 23. Brennan JK; Thomson KT; Gubbins KE (2002). Langmuir 18:5438. 24. Furmaniak S; Terzyk AP; Gauden PA; Harris PJF; Kowalczyk P. J. Phys.: Condens. Matter 21:315005, 2009. 25. Marks NA; Cooper NC; McKenzie DR; McCulloch DG; Bath P; Russo SP. Phys. Rev. B 65:075411, 2002. 26. Kumar A; Lobo RF; Wagner NJ. Carbon 43:3099, 2005. 27. Herrera LF; Junpirom S; Do DD; Tangsathitkulchai C. Carbon 47:839, 2009. 28. Shi Y. J. Chem. Phys. 128:234707, 2008. 29. Powles RC; Marks NA; Lau DWM. Phys. Rev. B 79:075430, 2009. 30. Jorge M; Schumacher C; Seaton NA. Langmuir 18:9296, 2002. 31. Rodríguez-Reinoso F. Carbon 36:159, 1998. 32. Gelb LD; Gubbins KE; Radhakrishnan R; Sliwinska-Bartkowiak M. Rep. Prog. Phys. 62:1573, 1999. 33. World Population to 2300. United Nations: New York, 2004. 34. Hoffert et al.. Nature 395:881, 1998. 35. McMichael et al.. In Comparative Quantification of Health Risk, World Health Organisation: Geneva, 2004. Ch 20. 36. Easterling DR; Meehl GA; Parmesan C; Changnon SA; Karl TR; Mearns LO. Science 289:2068, 2000. 37. Rosegrant MW; Cline SA. Science 302:1917, 2003. 38. de Wit M; Stankiewicz J. Science 311:1917, 2006. 39. Patz JA; Campbell-Lendrum D; Holloway T; Foley JA. Nature 438:310, 2005. 40. Garnaut R. Garnaut Climate Change Review. Cambridge University Press: Melbourne, 2008. 41. Schlapbach L; Züttel A. Nature 414:353, 2001. 42. Cook TL; Komodromos C; Quinnn DF; Ragan S. In Carbon Materials for Advanced Technologies (ed. Burchell, TD), Pergamon, 1999. 43. Miller JR; Simon P. Science 321:651, 2008. 44. Globus A; Lawton J; Wipke T. Nanotech. 10:290, 1999. 45. Svergun DI; Petoukhov MV; Koch MHJ. Biophys. J. 80:2946, 2001. 46. Coello CAC et al. Evolutionary Algorithms for Solving Multi-Objective Problems. Kluwer: NY, 2002. 47. McGreevy RL; Pusztai L. Mol. Sim. 1:359, 1988. 48. Djurdjevic DP; Biggs MJ. J. Comp. Chem., 27:1177, 2006. 49. Salazar R; Gelb LD. Langmuir 23:530, 2007. 50. Onbaşoğlu E; Özdamar L. J. Global Opt. 19:27, 2001. 51. Marchand A. In Carbon and Coal Gasification, Martinus Nijhoff: Dordrecht. 1986, p. 94. 52. Moreno-Castilla C; Mahajan OP; Walker PL; Jung HJ; Vannice MA. Carbon 18:271, 1980. 53. Petersen T; Yarovsky I, Snook I; McCulloch DG; Opletal G. Carbon 41:2403, 2003. 54. Lewis I C; Singer LS. Chem. Phys. Carbon 17:1, 1981. 55. Shim H-S; Hurt RH; Yang NYC. Carbon 38:29, 2000. 56. Badalyan A.; Pendleton P. J. Colloid Interface Sci. 326:1, 2008. 57. Frenkel D; Smit B. Molecular Simulation (2nd ed.). Academic Press: London, 2002. 58. Möller D; Fischer J. Fluid Phase Equilibria 100:35, 1994. 59. Kumar A; Jobic H; Bhatia SK. Adsorption 13:501, 2007. 60. Zhu Z; Lu GQ; Finnerty J; Yang RT (2003). Carbon 41:635. 61. Yang FH; Yang RT. Carbon 41:2149, 2003. 62. Kyotani T; Ito K; Tomita A; Radovic LR (1996). AIChE J. 42:2303.

1
A Technology for Concentrating Ventilation Air Methane for Power Use
Professor Mark J. Biggs School of Chemical Engineering, The University of Adelaide, Adelaide 5005.
Executive Summary
The methane in mine ventilation air is a major source of greenhouse gas emissions. It is also, however, a large potential energy source at mine sites provided it can be concentrated above the 0.1-1% typical of mine ventilation air. The overall objective of the project proposed here is to develop a prototype adsorption-based technology that will concentrate the methane in mine ventilation air to such a level that it can be subsequently used as an energy source onsite at mines. This will be done by developing both a suitable adsorbent and a laboratory-scale prototype process to exploit it. A model of the process will also be developed to allow a detailed economic assessment of the trade-off between methane concentration and power requirements of the process and, in due course, its scale-up to sizes required in the field. It is anticipated that these developments will remove the barriers to exploitation of the proposed technology in the industrial context leading to take-up within 5-10 years with subsequent significant reductions in the greenhouse gas emissions and costs of coal mining operations.
1. Objective The US Environment Protection Agency estimates that fugitive methane from coal mines around the world represent about 1.4% of all greenhouse emissions that originate from human activity [1]. Because the global warming potential of methane is more than 20 times that of carbon dioxide, this is equivalent to the CO2 emitted by more than 40 million average sized cars travelling 10,000 km per year. Although the methane contained in mine ventilation air streams is of a low concentration (0.1 to at best 1% by volume [2]), it is the largest contributor – around 70% [2] – to these fugitive emissions. It is, however, also a major potential source of energy – the EPA estimated it could provide around 3 GW of electrical power [2] – as long as the methane can be concentrated to at least 1% by volume if not higher [3]. The overall objective of the proposed work is to develop a prototype adsorption-based technology that can concentrate the methane in mine ventilation air to such a level that it may be used to economically provide power at mine sites.
2. Expected Outcomes and Benefits If successfully developed and deployed, the proposed technology for concentrating the methane in ventilation air will lead to a dramatic reduction in the greenhouse emissions of underground coal mining operations worldwide through two routes: 1. the direct elimination of up to 70% of fugitive methane emissions from coal mining,
which is equivalent to taking around 30 million cars off the road per year; and 2. an estimated 20 Mt reduction in CO2 emissions worldwide – which is equivalent to a
further 5 million cars being removed from the road per year – as the power sources for mining operations are switched to those that exploit the now more-concentrated methane.
These lowering of emissions will lead to major reductions in operating costs worldwide by: 1. reducing power costs by around $1.5 billion per annum; and 2. reducing costs associated with any ‘carbon tax’ or related scheme if in operation. Rollout of the technology will also clearly generate significant income for the developers and manufacturers on both the capital (process equipment) and operational sides (adsorbents).

2
The main tangible outcomes of the project will be: 1. An adsorbent capable of delivering at least 1% by volume methane in air for typical
mine ventilation air streams. 2. A lab-scale demonstrator of a vacuum swing adsorption (VSA) process that will utilise
the adsorbent which can be used to: a. tangibly demonstrate to potential interested industry partners the viability of the
technology; and b. provide detailed data for validation of models of the process (see next).
3. A validated process model that will allow: a. detailed economic assessment of the trade-off between methane concentration and
power requirements of the methane concentration process; and b. scale-up of the process to sizes required in the field.
4. A patent application protecting the IP encapsulated in the adsorbent and processes exploiting it as derived from the validated process model.
Other major outcomes of the project will be expertise in developing: 1. adsorbents for concentrating the methane in mine ventilation air streams, which can be
exploited post-project to develop improved adsorbents; and 2. processes for concentrating the methane in mine ventilation air streams, which can be
exploited post-project to develop new or better field-scale processes. It is anticipated that all these outcomes combined will remove the barriers to exploitation of the proposed technology in the industrial context leading to take-up within 5-10 years with subsequent significant reductions in the greenhouse gas emissions and cost of coal mining operations both in Australia and more widely.
3. Brief Summary of Work Program The overall objective of the project will be achieved by meeting the following sub-objectives: 1. Develop an adsorbent that can concentrate the methane in mine ventilation air to at least
1% by volume. 2. Develop and characterise a laboratory-scale vacuum swing adsorption (VSA) process
that successfully exploits the adsorbent (i.e. achieves the 1% concentration). 3. Develop a validated model of the VSA process suitable for analysis of the process and,
in due course, its scale-up to sizes required in the field. 4. Undertake a detailed economic analysis of the proposed technology to identify the
trade-off between energy required and degree of methane concentration. 5. File patent applications for the adsorbent and VSA process to be developed and
demonstrated here. These sub-objectives will be achieved over a 3 year programme. The methodology for each of these sub-objectives is considered below along with a technical justification in each case. Objective 1: Adsorbent development The first major aspect of the proposed project is to develop an adsorbent that is capable of effectively (i.e. without undue energy input) concentrating the methane found in typical mine ventilation air streams to a level sufficient for subsequent use in power generation technologies. We have set the minimum level of concentration at 1% by volume as this is what is considered usable in lean-burn turbine technologies [3], but we will aim to exceed this so as we have the capacity to trade-off concentration performance against the energy required to achieve the performance.

3
Whilst there are many classes of adsorbent, one of the most promising classes are nanoporous carbons because they are: (a) relatively inexpensive compared to many alternatives; (b) hydrophobic at moisture levels typical of those found in mine ventilation air, unlike other candidate adsorbents such as zeolites; and (c) they can be designed so that they prefer to exhibit selectivity (i.e. preference) towards some gases over others – for example carbons have been designed to be selective to methane over the components of air [4]. The selectivity of nanoporous carbons for one gas over others in a mixture can be modified by adjusting the pore size distribution and surface chemistry – we will look to do this so as to push the selectivity beyond that necessary to concentrate the methane at 1% by volume in a vacuum swing adsorption (VSA) process. A PhD student will initially start with modifying off-the-shelf carbons based on the experience of the investigators as well as that garnered from the wider literature. However, depending on how promising these new adsorbents are, we will also in the intermediate term look to use other ‘home-made’ carbons so as to gain greater capacity to tailor the adsorbents. In parallel to this, a second PhD student (PhD-2) will use molecular modelling [5] to determine what pore sizes and surface chemistries are likely to lead to a improvements in the ability to concentrate methane which will then be implemented in the laboratory by PhD-1. Whilst carbons are excellent candidate adsorbents in the current context, it is possible that they may not be able to deliver the desired performance without undue energy requirements. A third PhD student (PhD-3) will, therefore, investigate novel metal-organic frameworks (MOFs), whose regular structure makes them more amenable to design through theory, and whose rich structural library and chemistry offer significant potential for delivering step-changes in selectivity. These gains will be set against the likely higher cost of these materials relative to carbons and their lower stability towards water, which may necessitate some drying of the ventilation air before concentration occurred. Objective 2: Laboratory-scale vacuum swing adsorption process development The second major aspect of the proposed work is the development of a process that can exploit the adsorbent to be developed under Objective 1 so as to deliver the desired methane concentration. Because the ventilation air is at atmospheric temperature and pressure and in large volumes, a vacuum swing adsorption (VSA) process is likely [6, 7] to be more efficient and effective than the pressure swing adsorption processes that have been tried in the past in this context [3]. A fourth PhD student (PhD-4) will design, build, test and characterise the performance of a laboratory-scale VSA rig. Design of this rig will be guided by examples found elsewhere in the literature (e.g. [7, 8]) in conjunction with heuristics and simple models [9]. Once build (in the School of Chemical Engineering Workshop), it will be tested and modified so as to achieve satisfactory operation. The performance characteristics of the rig using one of the more promising adsorbents from Objective 1 will then be determined extensively so as to provide data for validation of the process model to be developed in Objective 3. The rig will also be used to assess the performance of the more promising adsorbents under cyclic conditions and the degradation in this performance with cycling. Objective 3: Development of validated VSA process model So as to enable the study of the influence of process variables and adsorption characteristics on the methane concentration process and, in due course, to scale-up the process for the field, it is proposed that a postdoctoral research associate (PDRA): 1. develop a model of the VSA process and validate it against detailed experimental data
to be obtained under Objective 2 by PhD-3; and 2. exploit the model to develop a detailed understand of the VSA process operating
characteristics as a function of process parameters and adsorbent properties; and 3. use the model to understand how the performance of the adsorbent to be developed and
characterised in Objective 1 by PhD-1 will vary with VSA process parameters.

4
Objective 4: Detailed economic analysis So as to support the eventual business case for the proposed technology, the PDRA will use results from the process model to be developed in Objective 3 to estimate its operational costs (see [8] for an example of such an analysis). In addition to taking into account the power requirements and how these may vary with the physical form of the adsorbent (e.g. packed beds of carbon granules vs. monoliths), they will also consider costs associated with issues around adsorbent cleaning (mine ventilation air is typically particle-laden) and renewing the adsorbents due to loss of capacity over time (their regeneration behaviour will be assessed in the laboratory-scale rig in Objective 2). Objective 5: Preparation and filing of patent applications The Chief Investigator will lead the preparation and submission of patent application(s) protecting the IP encapsulated in the novel adsorbent and VSA process to be developed. The patent application(s) will be supported by experimental results produced by the PhD students as well as various cases developed through the process modelling by the PDRA. This activity will be supported by Adelaide Research & Innovation (ARI) Ltd, the commercialisation arm of the University, which has access to considerable early stage commercialisation funding that will facilitate the roll-out of the proposed technology to industry (see http://www.adelaide.edu.au/aripl/commercial/).
4. Safety Implications The experiments will be conducted at such a small scale and with such low concentrations of methane that there are no significant safety implications of the proposed work. The University of Adelaide has in place well established and robust OH&S procedures as is demonstrated by it being granted self-insuring status by Worksafe SA. The low concentrations of methane envisaged also means there is also unlikely to be any real significant safety implications if the proposed technology were to be successfully rolled out in to industry.
5. Key Personnel
The project will be lead by Professor Mark J. Biggs, who was awarded his PhD in 1996 from Adelaide before spending 15 years in UK academia prior to returning to Adelaide to take up the Chair of Chemical Engineering and Headship of the School of Chemical Engineering. Professor Biggs is an internationally recognised expert in the field of nanoporous materials and adsorption and transport within them as demonstrated by: • his being awarded in his own right $3.6M in competitive grants over the past decade; • his over 50 publications with approximately 40 of these appearing in the top
international journal literature, including 7 invited contributions; • his over 35 invited lectures, including many on the molecular modelling of nanoporous
carbons and fluids within them (e.g. 5th Symposium on Carbon Resource Science, Perth, 2010; 2nd National Workshop on Computations in Nanotechnology, Israel, 2009);
• his guest editorships of 8 separate special issues of top rated journals (e.g. Chemical Engineering Research & Design (IChemE), Energy & Fuels (ACS);
• his being a recipient of a Royal Academy of Engineering Research Fellowship in 2007; • his membership of the Australian Research Council College of Experts, which is made
up of around 80 internationally recognised researchers appointed by the Minister for Innovation, Industry, Science and Research to provide strategic advice and play a key role in the identification of research excellence in Australia; and
• his record of collaboration with other world leaders in the nanoporous carbon and adsorption fields, including Prof. Rodríguez-Reinoso of Alicante University, who is editor of Carbon, the leading journal in the carbon field.

5
Dr Philip W. Kwong, who was awarded his PhD in 2009 from The Hong Kong University of Science and Technology (HKUST) before taking up a lectureship at Adelaide in the same year, has considerable experience in synthesis of nanoporous materials and their experimental characterisation, and their application to adsorption and reaction of volatile organic compounds over various nanoporous media. Despite his relatively junior status, he has published nearly 20 articles, including close to 10 refereed journal publications.
6. Budget Staffing As indicated in §3 above, funding is required for a total of 4 PhD students and one postdoctoral research associate (PDRA) over a period of three years. The person-days and associated costs arising from this based on a 240 day working year are indicated in Table 1.
Table 1. Summary of person-days and their cost implications Personnel Number of Net person-days Cost per person-day* Total cost PhD students 4 4 × 3 × 240 = 2880 $167 $481,000 PDRA 1 1 × 3 × 240 = 720 $388 $280,000 * This cost is inclusive of all overheads Equipment The costs associated with the materials synthesis and characterisation work to be undertaken in Objective 1 is estimated at $30,000 for consumables, and both maintenance and charges arising from testing and analysis of the materials.
The costs associated with the materials and manufacturing of the VSA rig to be developed in Objective 2 is estimated at $30,000. Travel A total of $6000 ($2000 per year) is requested for the investigators to attend six-monthly review meetings. Although no major engagement with industry is envisaged over the period of the project, it is anticipated that as the project develops the investigators will look to engage with other organisations working in the area (e.g. CSIRO Exploration and Mining in Brisbane) and begin to explore interest in industry – a further $4,000 is, therefore, envisaged for these purposes. Total including non-ACARP support The total funds requested from ACARP will be $831,000. The University of Adelaide will make in-kind contributions of $177,000 in the form of salaries and overheads associated with the academic staff involved (Biggs and Kwong), and a further $30,000 in facilities costs (e.g. those of eResearchSA, who will provide much of the high-performance computing capacity, and the School of Chemical Engineering’s Advanced Analytical Laboratory).
References 1. Assessment of Worldwide Market Potential for Oxidizing Coal Mine Ventilation Air
Methane. US Environmental Protection Agency, EPA 430-R-03-002 (2003). 2. Su, S.; Chen, H.; Teakle, P.; Xue, S. J. Env. Man. 86 (2008) 44-62. 3. Su, S.; Beath, A.; Guo, H.; Mallett, C. Prog. Energy Combust. Sci. 31 (2005) 123-170. 4. Sircar, S.; Golden, T.C.; Rao, M.B. Carbon 34 (1996) 1-12. 5. Bandosz, T.J.; Biggs, M.J.; Gubbins, K.E.; Hattori, Y.; Iiyama, T.; Kaneko, K. Pikunic
J.; Thomson, K. Chem. Phys. Carbon 28 (2003) 41-228. 6. Gomes, V.G.; Hassan, M.M. Sep. Purif. Technol. 24 (2001) 189-196. 7. Li, G.; Xiao, P.; Webley, P.; Zhang, J.; Singh, R.; Marshall, M. Ads. 14 (2008) 415-422. 8. Zhang, J.; Webley, P.A.; Xiao, P. Energy Conv. Man. 49 (2008) 346-356. 9. Jain, S; Moharir, A.S.; Li, P; Wozny, G. Sep. Purif. Technol. 33 (2003) 25-43.