Embed Size (px)
Citation preview

Research ArticleAdvances in Endovascular Intervention Using Biomaterials: Studyon Heat Efficiency of Scissor-Type Ultrasonic Catheter Device
Minoru Morita ,1 Jingjing Yang ,2 and Zhongwei Jiang1
1Yamaguchi University, Tokiwadai 2-16-1, Ube, Yamaguchi, Japan2Kunming University of Science and Technology, 727 South Jingming Road, Chenggong District, Kunming 650500, China
Correspondence should be addressed to Minoru Morita; [email protected]
Received 5 January 2021; Revised 8 February 2021; Accepted 20 February 2021; Published 10 March 2021
Academic Editor: Xing Chen
Copyright © 2021 Minoru Morita et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
To improve the performance of the ultrasonic device during the endovascular operation, a scissor-type ultrasonic catheter devicewith compound vibration was developed. The heat generated by friction between the target and the device affects its coagulationmechanism while the actuator contacts the tissue. The scissor-type ultrasonic catheter device proposed in this study is expectedto improve heat generation performance because it has the action of rubbing the object when it is pushed by combinedvibration. In addition, since it is constructed by simple notch processing, it can be miniaturized and can be expected to beintroduced into catheters. However, the observation of ultrasonic vibration during frictional heating is difficult, which is an issuefor device design. In this paper, a thermal-structure coupling analysis was done using the finite element method to calculate theheat generation efficiency and evaluate its coagulation performance.
1. Introduction
Vibration has been widely utilized for therapeutic pur-poses. Since the 1950s, many medical devices based onvibration have been invented and applied for therapyapplications including tissue cutting, cataract phacoemulsi-fication, fat emulsion, ultrasonography, bone fracture heal-ing, cancer treatment, sonothrombolysis, and so on [1, 2].These devices work based on mechanical vibration, andthe effective vibration needs to be delivered to the tipdirectly in complicated environments with many restric-tions. In this thesis, a new end-effector with the desiredvibration mode at the end-effector tip was designed forcatheter surgery applications. The proposed new structureof the end-effector can transmit the longitudinal elasticwave through a shaft and convert it into scissor-typevibration (compound longitudinal-transversal vibration)just at the end-effector tip.
The main research line of this thesis is to design an effec-tive end-effector used in a microcatheter for hemostasis by
coagulated proteins. In the coagulation of proteins by frictionof an end-effector which is excited by mechanical vibration,the tip transversal vibration is needed for supplying frictionheating function in narrow blood vessels. An ultrasonic cath-eter surgery device is a device that uses ultrasonically vibrat-ing heat to denature the tissue protein and simultaneouslyperforms hemostasis and cutting function at the incision.According to the reports on hemostasis by an ultrasonicdevice [3, 4], the essential hemostatic mechanism is that thecoagulated proteins caused by the friction heat seal the bleed-ing vessels. For these devices, the heat generation efficiencydepends on the state of contact between the tissue and thevibrating blade because the blood coagulation needs enoughheat (the coagulated protein occurs at 63 degrees [5]). Onthe contrary, it will take a long time to interrupt the bloodflow if the heat does not rise enough, which will lead to inci-sion closure difficulties and other tissue damage. Therefore,we realized that the effective solution for stopping the bleed-ing quickly during surgery is to improve the heat generationefficiency at the incision.
HindawiBioMed Research InternationalVolume 2021, Article ID 5543520, 15 pageshttps://doi.org/10.1155/2021/5543520

In this study, we analysed an ultrasonic catheter sur-gery device with a novel structure to improve the heatgeneration efficiency by exciting the scissor-type com-pound vibration at the tip of the device and using theultrasonic vibration of rubbing while pushing the bladeagainst the tissue. To find the optimal design of this newultrasonic catheter surgery device, it is necessary to evalu-ate the heat generation phenomenon and compare it withother models. It is difficult to observe small vibrations at ahigh sampling speed. Due to the individual differences ofbiomaterials, the reproducibility of the test and associatedparameters which contribute to device performance aredifficult to be ensured and evaluated, respectively. There-fore, we developed a finite element analysis model withheat-structural interaction to evaluate the device’s coagu-lating characteristics, and the heat generation perfor-mances with different model shapes were simulated andcompared in this paper.
2. Design and Modelling
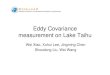
2.1. Designed Method of Ultrasonic Device. The schematicimage of the new proposed scissor-type actuator wasdesigned in our previous research [6–9], as shown inFigure 1. This actuator consisted of a shaft and two smallbranches.
The two branches were connected to the shaft, andtwo inverse symmetrical slant planes are cut at the headend of the branches. Figure 2 presents the cutaway viewof the scissor-type ultrasonic incision device. It works thefollowing way. Firstly, a sinusoid voltage with the requiredfrequency is applied to the transducer to generate the lon-
gitudinal elastic wave. Then, the longitudinal wave propa-gates through the shaft and reaches to the branch; thewave impinges on the slant plane with an oblique angleand excites a fluctuating motion of the branch due tothe reflection and mode conversion caused by the wavereflection. Finally, swing the branches in the oppositedirection between branches I and II like a scissor, asshown in Figure 2.
2.2. Mathematic Modelling of Structural-Heat Problem. Thestructural dynamics equation is as follows [10, 11].
M½ � €uf g + D½ � _uf g + K½ � uf g = F tð Þf g + P½ �: ð1Þ
Here, ½M�, ½D�, and ½K� are the mass matrix, dampingmatrix, and stiffness matrix, respectively; fFðtÞg is thetime-varying load; ½P� is the contact pressure; and fug, f_ug, and f€ug are the displacement, velocity, and accelera-tion, respectively. The penalty method was used to calcu-late the contact pressure ½P�, and then Equation (1) wasused to calculate the frictional stress and vibrational veloc-ity of the actuator. The transient analysis was done to ana-lyse the heat transfer between the actuator and tissue, asfollows:
C½ � _hn o
+ K½ � hf g = Q hð Þf g, ð2Þ
where ½C� is the specific heat matrix, ½K� is the thermalconductance matrix, fQðtÞg is the heat flow matrix, andfhg and _fhg are the temperature and time derivative oftemperature, respectively.
27
Unit mm
Shaft
Branch
(a)
8
4.35
0.90
1.80
(b)
1.80
4.35 R0.10
0.20
0.
80
(c)
Figure 1: Schematic image of scissor-type ultrasonic device: (a) isometric view, (b) side view of branch, and (c) top view of branch.
2 BioMed Research International

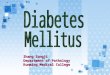
2.3. Finite Element Method and Modelling. The finite ele-ment method (FEM) model used in this study was basedon the previous research method, which has proposed ananalysis method for friction stir welding [12–18]. TheFEM model of the ultrasonic catheter surgery forstructural-heat analysis was developed by ANSYS software,as shown in Figure 3. The material of the human tissuewas used as the natural rubber to simplify simulation. Asthe mesh near the contact surface, 0.2mm 10-node tetra-hedral elements were used. The material parameters ofthe actuator and nature rubber are listed in Table 1. Asthe boundary condition, the bottom surface of the rectan-gular parallelepiped rubber target was fixed. From previousresearch, the shaft of the ultrasonic catheter used in this
research has a structure to generate only longitudinalvibration [6, 9]. Therefore, only the X-direction displace-ment was inputted to the left end of the shaft as a bound-ary condition. The input signal was the displacement with200μm added on the left end of the shaft to press theshaft to the rubber target, and the phenomenon of heatgeneration during vibration of the actuator was recorded.As we know, resonance of the actuator by the input sinu-soidal wave requires a relatively long analysis time toobtain enough amplitude, which leads to the problem ofcomputational cost. In addition, the ultrasonic catheterdevice does not generate heat unless pressed against the
Table 1: Parameters of actuator and natural rubber.
Material property Titanium Natural rubber
Young’s Modulus 96GPa 17.6MPa
Density 4620 kg/m2 1200 kg/m2
Poisson ratio 0.36 0.3
Thermal expansion 9:4 × 10−6/°C 270 × 10−6/°CThermal conductivity 21.9W/m°C 0.2W/m°C
Specific heat 522J/kg°C 150 J/kg°C
Frictional coefficient 0.2
Initial temperature 22°C
0
50
100
150
200
250
0 0.1 0.2 0.3 0.4
Inpu
t disp
lace
men
t (𝜇
m)
Time (ms)
U0.1
U0.2
U0.3
U0.4
Figure 4: Input displacement signal.
X
YShaft
1
Branch INotch
X
Y
Branch II
1
2
2
3
4
Figure 2: Cutaway of two inverse symmetry branches:① input signal,② longitudinal wave propagating to tip,③mode conversion and swingbranch I, and ④ branch II swings the opposite direction from branch I.
Input displacementInitial gap 100 𝜇m
X
YUT
(a)
X
Y
Z
Scissor-type device
Natural rubber
(b)
Figure 3: Three-dimensional view of FEM model for scissor-type device. Finite element mesh was generated using 10-node tetrahedralelements: (a) side view; (b) isometric view.
3BioMed Research International

X
Z
(a)
X
Z
(b)
X
Z
(c)
Figure 5: Model shapes of branches with different tips: (a) Model 1 (longitudinal), (b) Model 2 (longitudinal+slit), and (c) Model 3 (scissor).
0.0
50.0
100.0
150.0
200.0
250.0
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
LongitudinalLongitudinal+slitScissor branch I
Disp
lace
men
t (𝜇
m)
UX
UY
Dx
Dy
–50.0
(a)
–10.0
–5.0
0.0
5.0
10.0
15.0
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
Y d
ispla
cem
ent (𝜇
m)
Longitudinal Scissor branch ILongitudinal+slit Scissor branch II
(b)
21
26
31
36
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
Tem
pera
ture
(°C)
LongitudinalLongitudinal+slitScissor
H3max
H2maxH1max
22
(c)
Figure 6: Time curve results of displacement and temperature about each branch model shape tip: (a) X- and Y-direction displacement-timecurve, (b) Y-direction displacement-time curve, and (c) temperature-time curve.
4 BioMed Research International

0
50
100
150
200
250
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
x d
ispla
cem
ent (𝜇
m)
(a)
–0.10
–0.05
0.00
0.05
0.10
0.15
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(b)
Scissor branch IScissor branch II
0.00.0
–0.1
0.10.20.30.40.50.60.70.80.9
0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(c)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(d)
–0.02–0.01
0.000.010.020.030.040.050.060.07
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(e)
–0.1
0.0
0.1
0.1
0.2
0.2
0.3
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(f)
Figure 7: Continued.
5BioMed Research International

0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250x
disp
lace
men
t (𝜇
m)
(g)
–0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(h)
–0.020.000.020.040.060.080.100.120.140.16
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(i)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(j)
–0.01
0.00
0.01
0.02
0.03
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(k)
–0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(l)
Figure 7: Continued.
6 BioMed Research International

target. Considering the above problems, in this study, theinput displacement (UT) was sliced by different time, asEquation (3) and Figure 4 show, and enough sinusoidalamplitude and can be obtained in a short analysis time.The initial gap between the catheter device tip and naturalrubber was 100μm.
UT =200 μm½ �∙ t
Tt ≤ Tð Þ,
200 μm½ � t > Tð Þ,
8<: T = 0:1 ~ 0:4: ð3Þ
3. Results and Discussion
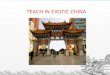
3.1. Effect of Branch Shape. To confirm the effect of thebranch shape on the heat generation efficiency, three types
of models with different structures were developed andanalysed, as shown in Figure 5. Model 1 (longitudinaltip) has a simple branch with no slit and notches on theactuator tip, in which the longitudinal vibration modewas excited along the whole actuator. In Model 2 (longitu-dinal+slit), a slit was cut at the centre of the branch, andthe longitudinal vibration mode same as Model 1 wasexcited. Compared with the above 2 models, Model 3 cuttwo inverse symmetrical slant planes at the branch tips,and a scissor-type vibration was excited successfully bythe longitudinal input signal. Figure 6 shows the analysisresults of the displacement in the X- and Y-directionsand the friction heat temperature for each model. Forthe input displacement, the function at T = 0:3ms inEquation (3) was used. As the results show, the displace-ments in the X-direction were the same for each model;
21.9
22.1
22.3
22.5
22.7
22.9
23.1
23.3
23.5
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
Tem
pera
ture
(°C)
U0.1
U0.2
U0.3
U0.4
(m)
← Max
← Min
Maximum tempH1max
Time = 0.419 ms
23.26823.11722.96522.81322.66122.50922.35822.20622.05421.90221.751
Input condition U0.1
(n)
← Max
← Min
Maximum tempH1max
Time = 0.497 ms
23.04522.91622.78822.6622.53222.40322.27522.14722.01921.8921.762
Input condition U0.2
(o)
← Max
← Min
Maximum tempH1max
Time = 0.404 ms
23
21.8
22.954
22.82922.74322.65722.57122.48622.422.31422.22922.14322.05721.97121.88621.8041
Input condition U0.3
(p)
← Max
← Min
Maximum tempH1max = 22.8°C
Time = 0.422 ms
22.84322.74322.64222.54122.4422.3422.23922.13822.03721.93621.836
Input condition U0.4
(q)
Figure 7: Analysis results of ultrasonic catheter device Model 1 (longitudinal). (a–c) Displacement-time curve of input condition U0:1. (d–f)Displacement-time curve of input condition U0:2. (g–i) Displacement-time curve of input condition U0:3. (j–l) Displacement-time curve ofinput condition U0:4. (m) Temperature-time curve. (n–q) Temperature contour map at peak value of input condition U0:1~U0:4.
7BioMed Research International

0
50
100
150
200
250
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
x d
ispla
cem
ent (𝜇
m)
(a)
0.0
–0.2
0.2
0.4
0.6
0.8
1.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(b)
–2.5–3.0
–2.0–1.5–1.0–0.5
0.00.51.01.52.02.5
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(c)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(d)
–0.6–0.7
–0.5–0.4–0.3–0.2–0.1
0.00.1
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(e)
–1.0
–1.5
–0.5
0.0
0.5
1.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(f)
Figure 8: Continued.
8 BioMed Research International

0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250x
disp
lace
men
t (𝜇
m)
(g)
–0.45–0.40–0.35–0.30–0.25–0.20–0.15–0.10–0.05
0.000.050.10
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(h)
–1.0–0.8–0.6–0.4–0.2
0.00.20.40.60.81.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(i)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(j)
–0.4–0.3–0.3–0.2–0.2–0.1–0.1
0.00.1
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(k)
–0.8–0.6–0.4–0.2
0.00.2
0.40.60.8
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(l)
Figure 8: Continued.
9BioMed Research International

however, the displacements in the Y-direction were totallydifferent. Under the same input longitudinal displace-ment, the longitudinal vibrations at the branch tips arealmost the same, but the transverse vibration of Model3 was clearly bigger than that of the other two models,which means Model 3 excited the transverse vibrationsuccessfully. The Y-direction displacements of branches Iand II of Model 3 are recorded and shown inFigure 6(b). Obviously, the transverse vibrations of thesetwo branches are reversed at the same time. It is con-firmed that each branch vibrated in the opposite direc-tion, which induces a scissor-type vibration at theactuator tip. The displacement in the Z-direction wasabout 10% of the X-direction; it is considered that the
influence of the heat generation by the Z-direction dis-placement is small.
Comparing the maximum frictional heat temperature(Hmax) of each model, Models 1 and 2 increased only1.3°C from the initial temperature of 22°C in 0.5ms, whileModel 3 increased 11.4°C. The temperature increase rateof the scissor-type actuator is more than 10 times com-pared with that of the other two models. This indicatesthat the heating generation of Model 3 is higher than thatof the other models. From these results, it is consideredthat generating the vibration amplitude in the Y-directiondue to the swing in Figure 2, ③ and ④, contributed to theimprovement of the heat generation performance of Model3. To analyse the thermal distribution between the
21.9
22.9
23.9
24.9
25.9
26.9
27.9
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
Tem
pera
ture
(°C)
U0.1
U0.2
U0.3
U0.4
(m)
← Max
← Min
Maximum tempH2max = 27.4
Time = 0.494 ms
27.38326.6825.97625.27324.5723.86623.16322.45921.75621.05320.349
Input condition U0.1
(n)
← Max
← Min
Maximum tempH2max = 24.4
Time = 0.494 ms
24.38424.08223.7823.47723.17522.87322.5722.26821.96521.66321.361
Input condition U0.2
(o)
← Max
← Min
Maximum tempH2max = 23.6Time = 0.46 ms
23.6
21.6
23.59823.423.22322.822.622.422.222
21.686
Input condition U0.3
(p)
← Max
← Min
Maximum tempH2max = 23.3°C
Time = 0.478 ms
23.2723.11222.95322.79422.63622.47722.31822.1622.00121.84221.684
Input condition U0.4
(q)
Figure 8: Analysis results of ultrasonic catheter device Model 2 (longitudinal+slit). (a–c) Displacement-time curve of input condition U0:1.(d–f) Displacement-time curve of input conditionU0:2. (g–i) Displacement-time curve of input conditionU0:3. (j–l) Displacement-time curveof input condition U0:4. (m) Temperature-time curve. (n–q) Temperature contour map at peak value of input condition U0:1~U0:4.
10 BioMed Research International

0
50
100
150
200
250
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
x d
ispla
cem
ent (𝜇
m)
(a)
–30.0
–20.0
–10.0
0.0
10.0
20.0
30.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(b)
–2.0–1.5–1.0–0.5
0.00.51.01.52.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(c)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(d)
–25.0–20.0–15.0–10.0
–5.00.05.0
10.015.020.025.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(e)
–1.5
–1.0
–0.5
0.0
0.5
1.0
1.5
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(f)
Figure 9: Continued.
11BioMed Research International

0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250x
disp
lace
men
t (𝜇
m)
(g)
–15.0
–10.0
–5.0
0.0
5.0
10.0
15.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(h)
–1.0–0.8–0.6–0.4–0.2
0.00.20.40.60.81.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(i)
0.0 0.1 0.2 0.3Time (ms)
0.4 0.50
50
100
150
200
250
x d
ispla
cem
ent (𝜇
m)
(j)
–10.0–8.0
0.0
6.04.02.0
–2.0–4.0–6.0
8.010.0
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
y d
ispla
cem
ent (𝜇
m)
(k)
–1.0–0.8–0.6–0.4–0.2
0.00.20.40.60.8
Scissor branch IScissor branch II
0.0 0.1 0.2 0.3Time (ms)
0.4 0.5
z d
ispla
cem
ent (𝜇
m)
(l)
Figure 9: Continued.
12 BioMed Research International

actuator tip and rubber, the temperature contour maps ofdifferent models at the peak value time were recorded andshown in Figures 7–9. The heat generation tends toincrease at the edge of the tip of the ultrasonic catheterdevice.
3.2. Effect of Input Velocity. Since this paper analyses by theinput condition of Equation (3) and Figure 4, the inputspeed affects the results and the results may differ fromthe real operation. To evaluate the validity of the analysismodel, the effect of changing the input velocity on dis-placement was discussed in this chapter. The velocity con-dition was changed by using the function at T = 0:1, 0.2,0.3, and 0.4ms in Equation (3). The measurement pointwas set as the catheter device tip. Figures 7–9 show theanalysis results about the displacement-time curve,
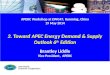
temperature-time curve, and temperature contour map ofeach model. Figures 10(a)–10(c) show the simulatedresults of peak-to-peak displacements in each direction(Dx, Dy, and Dz). The results show that the expectedvibration modes are excited in each model. Figure 10(d)summarizes the analysis results of the maximum tempera-ture of the target rubber. The displacement results weresuggested to be valid because the displacement in eachdirection increased with the speed of the input displace-ment, and the Y-direction displacement of Model 3 hasthe opposite direction vibration in each branch. The tem-perature results were suggested to be valid because theheat generation starting time has become faster dependingon the speed of the input displacement, and the tempera-ture also increased with the speed. In Figure 10(a), theinput velocity has a big influence on the output
21.9
71.9
121.9
171.9
221.9
271.9
0.0 0.1 0.2 0.3 0.4 0.5Time (ms)
Tem
pera
ture
(°C)
U0.1
U0.2
U0.3
U0.4
(m)
← Max
← Min
Maximum tempH3max = 279.3Time = 0.493 ms
279.3251.2223.09194.99166.88138.78110.6882.5754.46526.361–1.744
Input condition U0.1
(n)
← Max
← Min
Maximum tempH3max = 128.6Time = 0.494 ms
128.63117.2105.7794.34182.91371.48460.05648.62837.19925.77114.342
Input condition U0.2
(o)
← Max
← Min
Maximum tempH3max = 33.4°CTime = 0.38 ms
33.5
20.9
33.40432.2430.9829.7228.4627.225.9424.6823.4222.1620.927
Input condition U0.3
(p)
← Max
← Min
Maximum tempH3max = 32.4°C
Time = 0.440 ms
32.37231.21930.06528.91127.75726.60325.44924.29523.14221.98820.834
Input condition U0.4
(q)
Figure 9: Analysis results of ultrasonic catheter device Model 3 (scissor). (a–c) Displacement-time curve of input condition U0:1. (d–f)Displacement-time curve of input condition U0:2. (g–i) Displacement-time curve of input condition U0:3. (j–l) Displacement-time curve ofinput condition U0:4. (m) Temperature-time curve. (n–q) Temperature contour map at peak value of input condition U0:1~U0:4.
13BioMed Research International

displacement of the X-direction in Model 3 (scissor). It isconsidered that the bending vibration of the Y- and Z-directions can be affected by the amplitude of the X-direc-tion. The dashed line of Figure 10(d) is drawn at the ini-tial temperature of 22°C; the result of the temperaturecorresponds well to the result of the displacement in theY-direction in Figure 10(b).
Moreover, the result of Model 3 (scissor) suggested thatthe Y-direction displacement has a large effect on the heatgeneration because the results are better under the input con-ditions of U0:3 and U0:4, even though the X-direction dis-placement is smaller than the other models. From theseresults, the amplitude increases in a direction parallel (Y- orZ-direction) to the surface of the target are conjectured toimprove the heat generated performance. These results wereexplained in terms of the heating phenomenon by friction;the validity of the analytical model is considered to have beenevaluated. This fact indicates that the scissor-type vibrationmode contributes to the improvement of the heat generation
performance because this mode vibrates parallel to the sur-face while pressing the target.
4. Conclusions
In this paper, the ultrasound catheter device was designed togenerate a composite vibration like a scissor, and then thestructural-heat interaction analysis was conducted by a seriesof finite element models to evaluate the heat generating per-formance. In the simulation, the results of improving the heatgeneration performance with our developed scissor-typeultrasonic catheter device were obtained. This fact indicatesthat the scissor-type vibration mode contributes to theimprovement of the heat generation performance becausethis mode vibrates parallel to the surface while pressing thetarget. This indicates that the heating generation of ourdeveloped ultrasonic catheter device has higher friction heatperformance than the other models. We plan in the nearfuture to study the coagulation experiment of blood vesselsusing a scissor-type ultrasound catheter device.
0
5
10
15
20
25
Input displacement condition
Longitudinal
Longitudinal+slit
Scissor
9.9 10.2 9.17.3
1613.1
10.3
7
25
16
7.6
2.5
Disp
lace
men
t (Dx
) (𝜇
m)
U0.1 U0.2 U0.3 U0.4
(a)
0
10
20
30
40
50
60
0.17 0.08 0.06 0.020.9 0.5 0.46 0.3
55
39
1915
Disp
lace
men
t (Dy
) (𝜇
m)
Input displacement condition
Longitudinal
Longitudinal+slit
Scissor
U0.1 U0.2 U0.3 U0.4
(b)
0
0.5
1.5
1
2
2.5
3
0.08 0.08 0.04 0.03
2.8
1 0.97 0.93
2.7
1.6
1 1.1
Disp
lace
men
t (Dz
) (𝜇
m)
Input displacement condition
Longitudinal
Longitudinal+slit
Scissor
U0.1 U0.2 U0.3 U0.4
(c)
0
50
100
150
200
250
300
22 →27.4
23.3
279
23.024.4
128.6
23.023.6
33.4
22.823.332.4
Longitudinal
Longitudinal+slit
Scissor
Tem
pera
ture
(°C)
Input displacement condition
U0.1 U0.2 U0.3 U0.4
(d)
Figure 10: Peak-to-peak displacement andmaximum template results of each branchmodel tip with different input velocities, (a) X-directiondisplacement (Dx), (b) Y-direction displacement (Dy), (c) Z-direction displacement (Dz), and (d) maximum temperature (H max).
14 BioMed Research International

Data Availability
The data that support the findings of this study are availablefrom the corresponding author upon reasonable request.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
This work was supported by JSPS KAKENHI Grant Number18K12107 and National Natural Science Foundation ofChina Grant number 51865021.
References
[1] G. T. Harr, “Therapeutic ultrasound,” European Journal ofUltrasound, vol. 9, no. 1, pp. 3–9, 1999.
[2] G. T. Harr, “Therapeutic applications of ultrasound,” Progressin Biophysics & Molecular biology, vol. 93, no. 1-3, pp. 111–129, 2007.
[3] J. F. Amaral, “Ultrasonic dissection,” End. Surgery, vol. 2,pp. 181–185, 1994.
[4] J. F. Amaral, “The experimental development of an ultrasoni-cally activated scalpel for laparoscopic use,” Surgical Laparos-copy & Endoscopy, vol. 4, no. 2, pp. 92–99, 1994.
[5] S.-A. M. Boddy, J. W. A. Ramsay, S. S. C. Carter, P. J. R. Web-ster, D. A. Levison, and H. N. Whitfield, “Tissue effects of anultrasonic scalpel for clinical surgical use,”Urological Research,vol. 15, no. 1, pp. 49–52, 1987.
[6] M. Ajoudanian, Z. W. Jiang, and M. Morita, “Study on anew type micro-stirrer excited by longitudinal elastic wavefor thrombus dissolution,” International Journal of AppliedElectromagnetics and Mechanics, vol. 37, no. 1, pp. 67–77,2011.
[7] M. Ajoudanian, Z. W. Jiang, andM. Morita, “Design of a noveltype micro-stirrer excited by longitudinal elastic wave forthrombus dissolution,” Journal of Biomechanical Science andEngineering, vol. 6, no. 4, pp. 262–269, 2011.
[8] M. Ajoudanian, Z. W. Jiang, and M. Morita, “Structural anal-ysis and design of micro-stirrer driven at a requested fre-quency for thrombus dissolution,” International Journal ofApplied Electromagnetics and Mechanics, vol. 41, no. 3,pp. 217–225, 2013.
[9] J. Yang, M. Morita, and Z. Jiang, “Design of a novel scissoringmicro-stirrer for blood clot dissolution,” Sensors and ActuatorsA: Physical, vol. 248, pp. 130–137, 2016.
[10] ANSYS workbench mechanical Dynamic analysis seminar text19.0 (in Japanese) CYBERNET SYSTEMS CO., pp. 146–171,2020.
[11] ANSYS workbench mechanical Heat transfer Analysis SeminarText 19.0 (in Japanese), CYBERNET SYSTEMS CO., pp. 94–105, 2020.
[12] Y. J. Chao, X. Qi, and W. Tang, “Heat transfer in friction stirwelding—experimental and numerical studies,” Journal ofmanufacturing science and engineering, vol. 125, no. 1,pp. 138–145, 2003.
[13] X. K. Zhu and Y. J. Chao, “Numerical simulation of transienttemperature and residual stresses in friction stir welding of
304L stainless steel,” Journal of Materials Processing Technol-ogy, vol. 146, no. 2, pp. 263–272, 2004.
[14] V. Soundararajan, S. Zekovic, and R. Kovacevic, “Thermo-mechanical model with adaptive boundary conditions for fric-tion stir welding of Al 6061,” International Journal ofMachine Tools and Manufacture, vol. 45, no. 14, pp. 1577–1587, 2005.
[15] P. Prasanna, B. S. Rao, and G. K. M. Rao, “inite elementmodeling for maximum temperature in friction stir weldingand its validation,” The International Journal of AdvancedManufacturing Technology, vol. 51, no. 9-12, pp. 925–933,2010.
[16] M. N. Balcı, B. Yıldırım, and S. Dag, “Analysis of frictionalcontacts with heat generation considering temperature depen-dent properties,” International Journal of Mechanical Sciences,vol. 101, pp. 59–69, 2015.
[17] C. S. Zhang, F. Z. Feng, Q. X. Min, and J. Z. Zhu, “Effect ofengagement force on vibration characteristics and frictionalheating in sonic IR imaging,” NDT & E International,vol. 76, pp. 52–60, 2015.
[18] G. Chen, Q. Ma, S. Zhang, J. Wu, G. Zhang, and Q. Shi, “Com-putational fluid dynamics simulation of friction stir welding: acomparative study on different frictional boundary condi-tions,” Journal of Materials Science & Technology, vol. 34,no. 1, pp. 128–134, 2018.
15BioMed Research International