Embed Size (px)
Citation preview

Adjoint-based optimization of unsteady turbulent flows:
Recent advances and current challenges
(Presented at NIA CFD Seminar )
Boris Diskin
Research Fellow, NIA
April 16, 2013

The Weizmann 2013 Workshop on Multilevel
Computational Methods and Optimization
• This a meeting in honor of Prof. Achi Brandt
• It is a unique forum of experts in multiscale computations
• My talk is probably the only one there that is not directly
focused on a multigrid/multiscale method
• My pitch is to review a cutting-edge method for really large-
scale aerodynamic computations and identify areas that can
benefit from recent multiscale ideas
• The cutting-edge computations of my choice is the adjoint-
based methodology for optimization of unsteady turbulent
flows on dynamic overset grids
• I am not presenting new results, rather reviewing recent
publications

Outline of the talk
• Adjoint-based optimization of unsteady flows
o Overview of the methodology
o Derivation of time-dependent adjoint equations
o Complex-variable verification of sensitivities
o Example: Constrained optimization of a helicopter flow
• Challenges:
o I/O of large amount of data (addressed by HPC)
o Convergence acceleration (addressed by HPC, partially by
multigrid, more improvement needed)
o Possible instability for chaotic flows (help wanted)
o Finding global optimum (help wanted)

Adjoint-Based Optimization of Unsteady
Flows

Overview
• Optimization problems arise in many unsteady aerodynamic applications
including optimal design of helicopters, turbomachinery blades, biologically
inspired UAV, wind-energy configurations, flow control, etc.
• Optimization approach is gradient based, i.e., gradient (sensitivity) of the
target functional is computed wrt all design parameters and optimization
packages such as PORT, NPSOL are used to update design parameters.
• The adjoint methodology is attractive for optimization problems with many
design variables, yet relatively few constraints. An adjoint-based sensitivity
analysis is performed at a cost comparable to a flow solution and
independent of the number of design variables.
• Discrete adjoint is attractive and viable approach for complex large-scale
optimization problems: consistent, rigorous, verifiably accurate
sensitivities, grid sensitivities, potentially automated (with automatic
differentiation), proven to work for large-scale aerodynamic optimization.

Recent references for Time-Dependent
Adjoint Methodology
• Yamaleev N. K., Diskin B., and Nielsen E. J., “Adjoint-Based Methodology
for Time-Dependent Optimization,” AIAA-2008-5857
• Nielsen E. J., Diskin B., and Yamaleev N. K., “Discrete adjoint-based
design optimization of unsteady turbulent flows on dynamic unstructured
grids,” AIAA Journal (2010), 48(6), pp. 1195-1206
• Nielsen E. J. and Diskin B., “Discrete Adjoint-Based Design Optimization
of Unsteady Turbulent Flows on Dynamic Overset Unstructured Grids,”
AIAA-2012-0554

Adjoint-Based Aerodynamic Design
Capabilities in FUN3D (NASA Langley)
• Steady-state adjoint research initiated – 1994
• Fully consistent RANS design capability – 1997
• Verification with complex variables – 1998
• Parallelization – 1999
• Discretely consistent iterations – 2001
• Grid adjoint – 2003
• Complex-variable sensitivity for thermo-chemical
non-equilibrium flows – 2004
• URANS design capability for dynamic grids – 2009
• Optimized I/O for massively parallel architectures - 2010
• Extension to overset grids – 2012
Unsteady Adjoint-Based Design Capabilities on
Dynamic Overset Unstructured Grids
• Extension to dynamic overset grids
opens up many new applications for optimization,
especially those involving large relative motions
- Rotorcraft
- Store/stage-separation problems
- Wind energy devices
- Biologically-inspired configurations
- Turbomachinery
• Many other exciting opportunities
- Error estimation
- Rigorous mesh adaptation
- Uncertainty quantification

Derivation of the Time-Dependent Adjoint
Equations

Flow Equations on Dynamic Grids
Subject to Time-Dependent Reynolds-Averaged Navier-Stokes Equations
Geometric Conservation
Law (GCL):
• GCL is added to preserve constant solution on dynamic grids
• Special interpolation equations for fringe, hole, and orphan points on overset grids are not shown
• 1st order temporal scheme is shown for simplicity, higher-order schemes are used in actual computations
- vector of spatial residuals, - computational grid - initial conditions
- control volume - mesh velocities, - outward unit normal
tfFFf
ba
N
Nn
nnn
),,();(min objobj DXQD
D DD design variables

Grid Equations
( , ) 0n G X DGeneral form:
0 0( , , )n n n n n G X X D X XR
Grids Undergoing Rigid Motion
• Multiple transformations telescope via matrix multiplication (e.g., parent-child body motion)
0( , )n n n n
surf G X D X XK
Deforming Grids
linear elasticity matrix K
• Mesh assumed to obey linear elasticity relations of solid mechanics
• Surface mesh may be further specified according to rigid motion relation
where
matrix of 3x3 blocks specifying rotations
vector of 3x1 blocks specifying translations
R
where
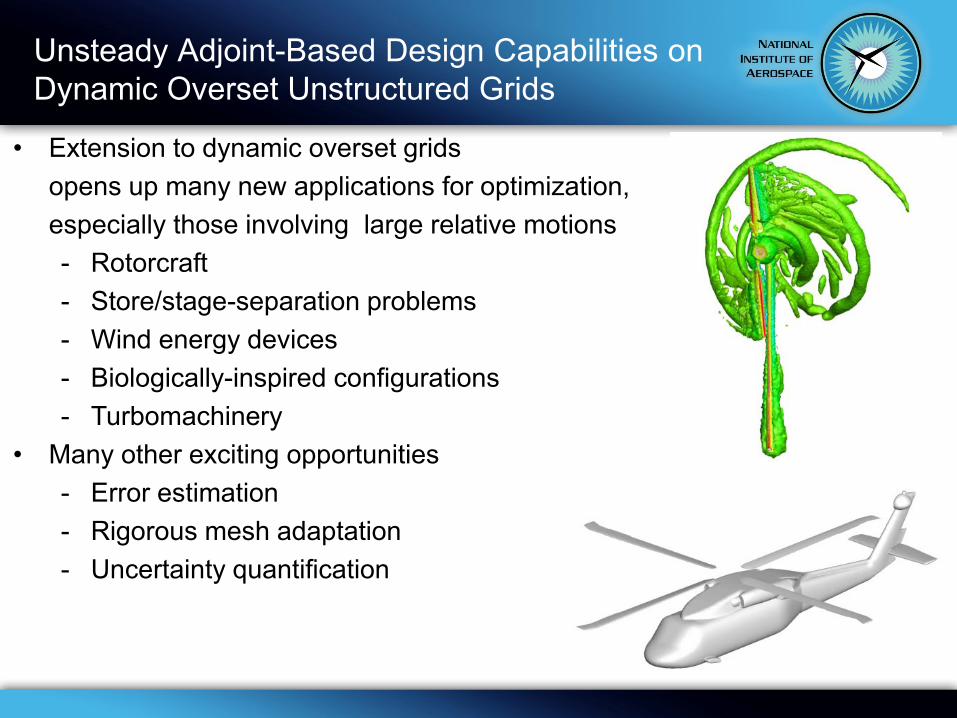
Lagrangian
12
• Overset interpolation equations are omitted for simplicity
• Differentiate wrt D, equate the coefficients of Qn/D and
Xn/D to zero
11
1 1
( , , , , )n nN N
Tn n n n n n
f g f GCL
n n
L f t tt
Q Q
D Q X Λ Λ Λ R QV R
0 0 0 0
1
NT T T
n n in
g f g
n
t f t t
Λ G Λ R Λ G
Objective Function Flow Equations
Grid
Equations Initial Conditions
f Λ g Λ Grid adjoin f Objective function Flow adjoint
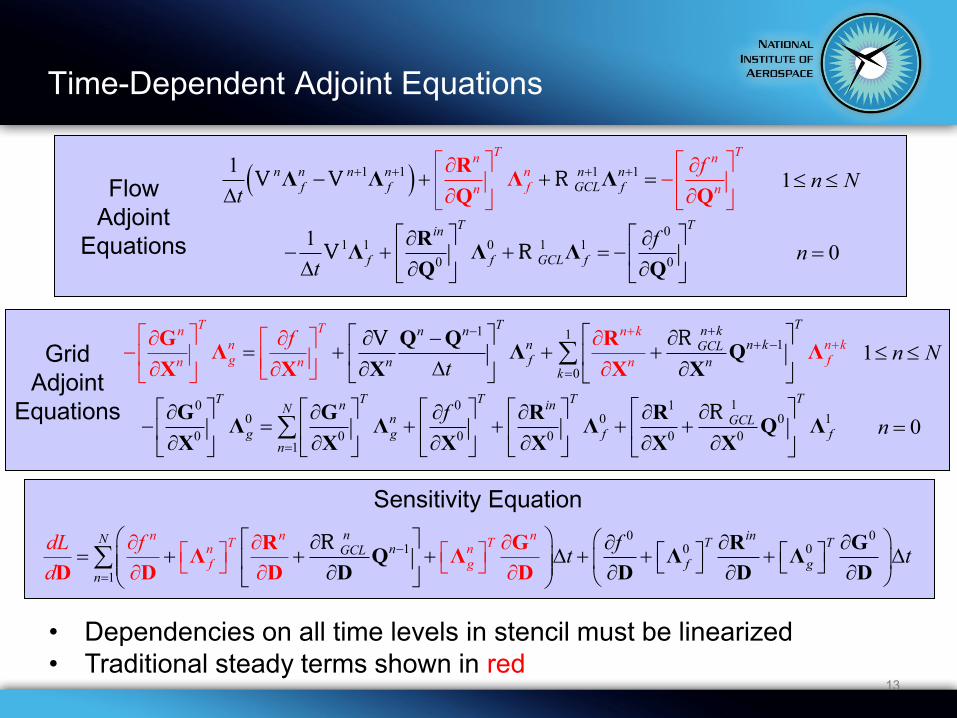
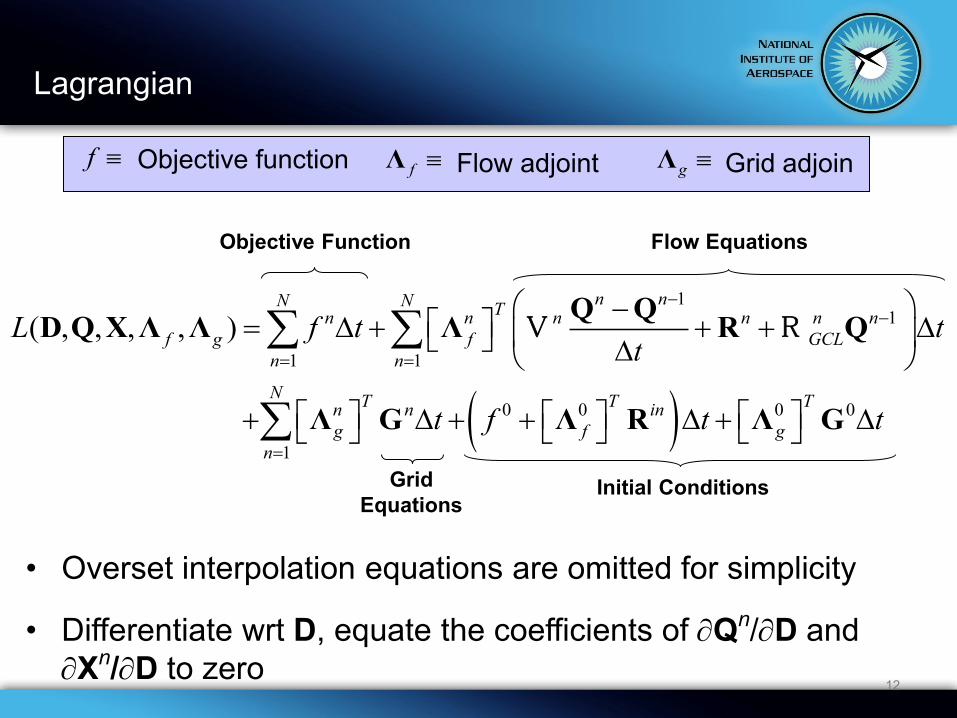
Time-Dependent Adjoint Equations
13
• Dependencies on all time levels in stencil must be linearized
• Traditional steady terms shown in red
1 1 1 11T T
n nnn n n n n n
f f Gf L f nCn
f
t
Λ
QΛ Λ
RΛ
QV V R
01 1 0 1 1
0 0
1T T
in
f f GCL f
f
t
RΛ Λ Λ
Q QV R
Flow
Adjoint
Equations
1 n N
0n
1 11
0
TTn kn n
n n k
T Tn n kn n kg fn n n
GCLfn n
k
f
t
Q Q
ΛG R
Λ ΛX
QXX XX
RV
10 0 10 0 0 1
0 0 0 0 0 01
TT T T Tn inN
n GCLg g f f
n
f
G G R RΛ Λ Λ Q Λ
X X X X X X
R
1 n N Grid
Adjoint
Equations 0n
0 01 0 0
1
n n nT
n inN T TnGCL
f gn
Tn nf g
fLt
d
dt
f
R G
Q Λ ΛD
R GΛ Λ
D D DD D D D
R
Sensitivity Equation

General Unsteady Implementation
• Adjoint solution is initiated at final time level N and
marched in reverse physical time: flow solution Qn at all
time levels must be available during reverse integration
• The approach is to store Qn to disk for all n; also store Xn
and Xn/t for dynamic mesh cases (total of 12
variables/grid point)
– Storage cost can easily yield disk requirement of O(TB)
• Infrastructure required to simultaneously manage/shuffle
data from as many as 7 time levels: current + 3 forward + 3
reverse

Complex-Variable Verification

Verification Using Complex Variables
2( ) ( )( ) ( )
2
f x h f x hf x O h
h
2 3 4
( ) ( ) ( ) ( ) ( ) ( )2 6 24
ivh ih hf x ih f x ihf x f x f x f x
Traditional Central Difference:
Complex Variables (Lyness & Moler, 1966):
Subtractive Cancellation Error
2Im[ ( )]( ) ( )
f x ihf x O h
h
• True second order accuracy: discretely consistent
• Complex-valued FUN3D source code generated automatically via scripting procedure
• h=10-50 for all complex results
• All equation sets converged to machine accuracy

Verification of Implementation Problem Definition
• Fully turbulent flow: M∞=0.1, a=2º, Re=1M, m=0.12
• Composite grid consists of six component grids
• All verification cases run on 360 cores
Component Topology Motion Motion Ancestry
Domain Hex (Cartesian) Inertial Static Great-grandparent
Fuselage Prz/pyr/tet Rotation, translation Rigid Grandparent
Blades Tet Azimuthal rotation Rigid Parent
Blades - 1º vertical oscillatory
rotation about hub Deforming Child
Total Composite
Grid
1,033,243 nodes
3,190,160 elements
Hex/prz/pyr/tet
- Deforming Four generations

Verification of Implementation
After 5 Physical Time Steps
Design Variable BDF1 BDF2 BDF2opt BDF3
Angle of Attack 0.032387388401060
0.032387388401060
0.032390834852470
0.032390834852468
0.032382969025224
0.032382969025223
0.032374960728472
0.032374960728471
Rot Rate
Blade 1 0.049010917009587
0.049010917009599
0.049303058989982
0.049303058989996
0.049392787479850
0.049392787479863
0.049505103043920
0.049505103043932
Shape
Blade 2 -0.004741396075215
-0.004741396075140
-0.005822463933444
-0.005822463933378
-0.005891431208194
-0.005891431208081
-0.006004976330078
-0.006004976329965
Flap Freq
Blade 3 -0.117898939551988
-0.117898939551986
-0.117819415724222
-0.117819415724217
-0.117766926835991
-0.117766926835985
-0.117703857525237
-0.117703857525232
Rot Rate
Fuselage 0.069017024693610
0.069017024693502
0.064234646041659
0.064234646041451
0.064468559766846
0.064468559764283
0.064688175664501
0.064688175664242
Trans Rate
Fuselage -0.002337944913071
-0.002337944913072
-0.002888267191799
-0.002888267191802
-0.002909479741304
-0.002909479741305
-0.002940703514842
-0.002940703514857
Shape
Fuselage -0.000035249806854
-0.000035249806854
-0.000039222298162
-0.000039222298162
-0.000039485944155
-0.000039485944155
-0.000039831885096
-0.000039831885096
LC D

Large-Scale Optimization

• Composite grid consists of 9,262,941 nodes / 54,642,499 tetrahedra
• Compressible RANS: Mtip=0.64, Retip=7.3M, m=0.37, a=0.0º
• Time step corresponds to 1º of rotor rotation
• Blade pitch has a motion governed by collective and cyclic control inputs:
• Baseline value of all control inputs is zero
UH-60A Blackhawk Helicopter Overview
1 1cos sinc c s
Blade
pitch Collective Lateral cyclic Longitudinal cyclic

• Baseline conditions yield untrimmed flight with =0.023 over second rev
• Objective is to maximize while satisfying trim constraints over second rev:
• Separate adjoint solutions required for all three functions
UH-60A Blackhawk Helicopter Problem Definition
LC
LC
2720
361
1min 2.0
360
n
L
n
f C t
720
1
361
10
360 x
n
M
n
g C t
720
2
361
10
360 y
n
M
n
g C t
such that
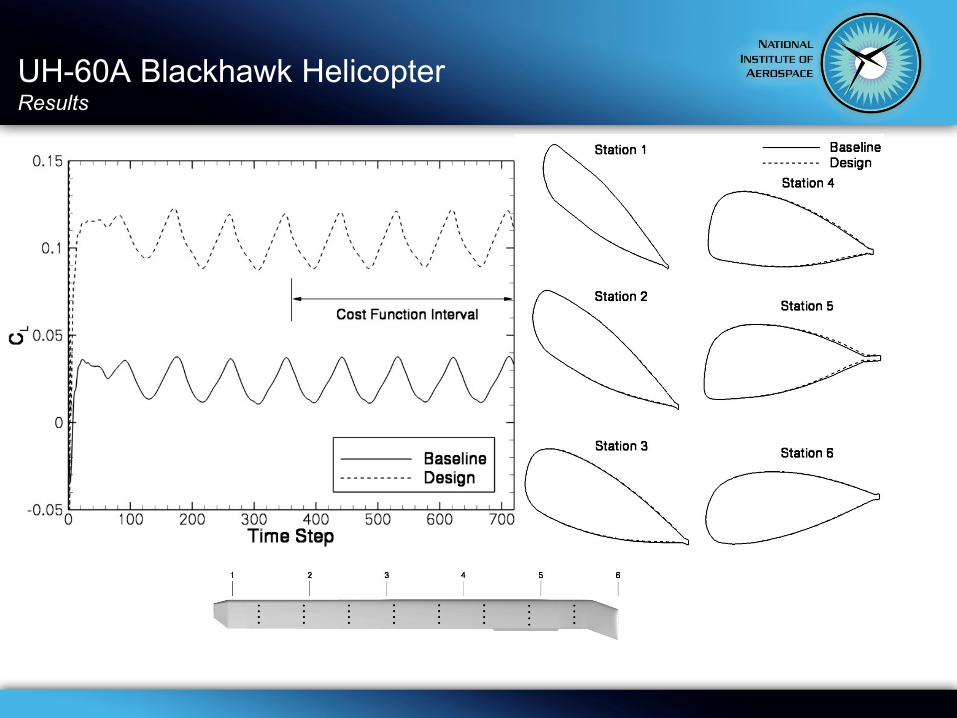
Blade shape design variable locations
67 design variables include 64
thickness and camber variables across
the blade planform, plus collective and
cyclic control inputs up to ±7º
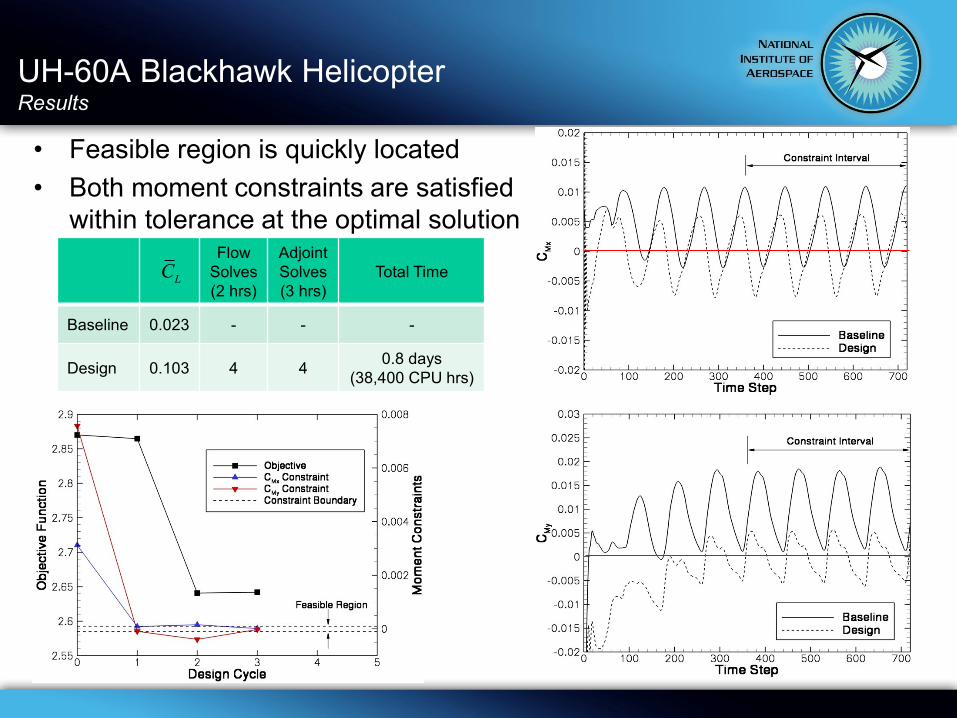
UH-60A Blackhawk Helicopter Results
• Feasible region is quickly located
• Both moment constraints are satisfied
within tolerance at the optimal solution Flow
Solves
(2 hrs)
Adjoint
Solves
(3 hrs)
Total Time
Baseline 0.023 - - -
Design 0.103 4 4 0.8 days
(38,400 CPU hrs)
LC
UH-60A Blackhawk Helicopter Results

Interpretation of Adjoint Solutions
• Adjoint shows sensitivity of objective function to local disturbances in space and time
• Solution can be used for sensitivity analysis, rigorous error estimation and mesh adaptation
– Traditional feature-based techniques do not identify such regions
Animations shown in reverse physical time
Helicopter Wind Turbine

Other Applications of Time-Dependent Adjoint Method
• Formal treatment of MDO problems • Sonic boom
– CFD-ground propagation
• Rotorcraft
– CFD-structures-trim-rigid dynamics
• Acoustics
– CFD-noise
• Laminar flow control
– CFD-transition
• Time-dependent mesh adaptation, error estimation, and uncertainty quantification

Challenge: Large Memory Requirements

I/O of Large Amounts of Data
• For large-scale optimization of unsteady problems, massively parallel computing must be used as efficiently as possible
• Parallel efficiency is complicated by the need for frequent disk I/O involving large amounts of data
– Flow solver must write solution to disk at each time step
– Adjoint solver must read solution from disk at each time step
• This disk I/O can be prohibitively expensive if implemented in a naïve fashion. Sequential I/O is not acceptable.
• I/O is scalable and efficient in high-performance computing (HPC) environment
E. J. Nielsen and W.T. Jones, “Integrated Design of an Active Flow Control System Using a Time-Dependent Adjoint Method.” Mathematical Modeling of Natural Phenomena, Vol. 6, No. 3, 2011, pp. 141-165

I/O of Large Amounts of Data:
HPC Environment
• O(10^3) processors, O(10^5) grid nodes per processor
• Lustre-based parallel scalable direct-access file system – Each processor writes to (reads from) its own direct-access file
– File pointer is placed precisely at the record of interest and I/O may proceed immediately
– Direct-access method is ~2 orders of magnitude faster than traditional sequential-access approach
– Sufficient disk space (petabytes of storage)
• Asynchronous I/O – I/O data is buffered, while execution continues
– “Hides” the cost of doing I/O behind the FLOPs
– Avoid altering the relevant data before the actual I/O has occurred
• In the current HPC environment, I/O of large amounts of
data is NOT a bottleneck

Challenge: Convergence Acceleration

Multigrid
• CFD solutions may require many months of high-performance
computing
• Multigrid is pioneered and advocated by Achi Brandt as the
most powerful method for convergence acceleration
• Our focus is on geometrical nonlinear multigrid for turbulent
flows on general unstructured grids (UG)
• Traditional “nested” multigrid is not well suited for UG
applications.
• Agglomeration multigrid (AgMG) is better suited.

Recent AgMG Advancements with Hiro Nishikawa (NIA) and Jim Thomas (NASA LaRC)
• Focus on methods that converge to machine-zero residuals
• Developed and applied unique idealized multigrid analysis
tools suitable for UG (2004, 2005, 2010)
– Idealized relaxation (tests coarse grid correction)
– Idealized coarse grid (tests relaxation)
• Extended hierarchical multigrid method (1999) to UG
– Developed AgMG method preserving features of geometry (2010)
– Critically assessed and improved AgMG for diffusion (2010)
– Applied AgMG to complex inviscid/laminar/turbulent flows (2010)
– Extended AgMG for parallel computations (2011)
– Improved robustness and efficiency of relaxation (2013)
• Implemented AgMG in FUN3D (NASA), collaboration on
implementation in BCFD (Boeing), TAU (DLR), JAXA

Parallel AgMG for Turbulent Flows (2011)
CFL = 200
60K nodes/processor

Transonic Turbulent Flow,
DPW-4 wing-body-tail configuration
Single Grid
Multigrid
CFL = 200, 10M nodes
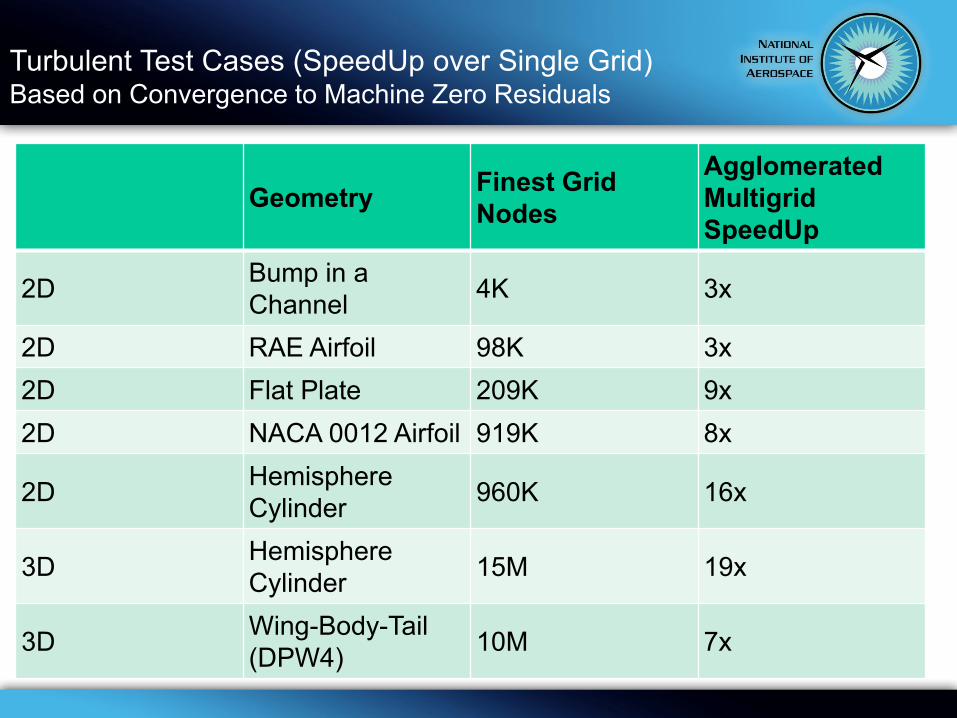
Turbulent Test Cases (SpeedUp over Single Grid) Based on Convergence to Machine Zero Residuals
Geometry Finest Grid
Nodes
Agglomerated
Multigrid
SpeedUp
2D Bump in a
Channel 4K 3x
2D RAE Airfoil 98K 3x
2D Flat Plate 209K 9x
2D NACA 0012 Airfoil 919K 8x
2D Hemisphere
Cylinder 960K 16x
3D Hemisphere
Cylinder 15M 19x
3D Wing-Body-Tail
(DPW4) 10M 7x

Further Improvements: Higher CFL Number
Grid Density
Agglomerated
Multigrid
V(3,3) Cycles
CFL=200
Structured
Multigrid
V(2,2) Cycles
CFL=10,000
Grid 1 (Fine) 276 24
Grid 2 (Medium) 241 23
Grid 3 (Coarse) 216 24
NACA 0012; M=0.15; Alpha = 15
Cycles to Machine Zero Residuals with Full Multigrid Cycle

Multigrid: Current Status
• Achieved significant improvements in performance and
understanding of various aspects of multigrid solvers for
complex turbulent flows
• Performance for inviscid and laminar flows is satisfactory
• Performance for 2D turbulent flows is satisfactory
• For 3D turbulent flows, significant convergence acceleration
has been demonstrated, but the performance is far from
optimal
• In some practical computations for complex 3D turbulent flows
(especially with separation) on imperfect grids in complex
geometries, multigrid needs to improve robustness

Challenge: Chaotic Flows

Chaotic Flows
• Chaotic flows present a serious challenge for gradient based
optimization methods
• By chaotic nature, solutions with arbitrarily close initial states
can diverge over time
– No continuous dependence on initial conditions
• While a nonlinear chaotic flow solution may remain bounded
in time, the corresponding linearization of flow equations may
admit exponentially growing solutions
– Linear instability
• These problems have been studied by Prof. Qiqi Wang (MIT)
and his students.
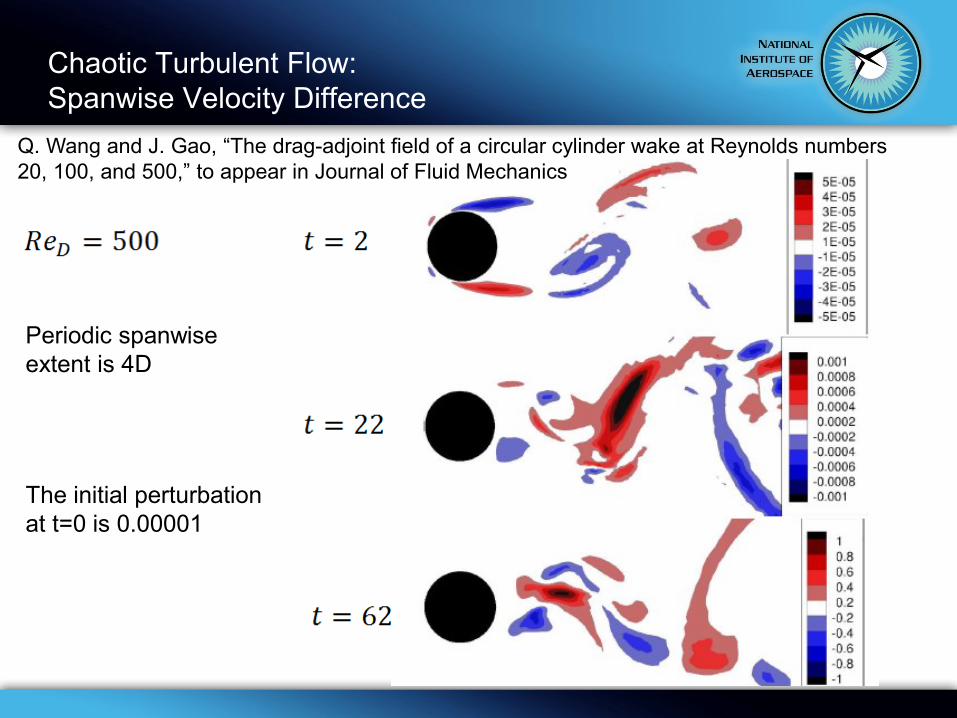
Chaotic Turbulent Flow:
Spanwise Velocity Difference
The initial perturbation
at t=0 is 0.00001
Periodic spanwise
extent is 4D
Q. Wang and J. Gao, “The drag-adjoint field of a circular cylinder wake at Reynolds numbers
20, 100, and 500,” to appear in Journal of Fluid Mechanics

Example of Linear Instability
NACA 0012 Airfoil Vorticity Contours Linear Residual L2 Norm

Challenge: Find Global Optimum

Search for the Global Minimum
• Gradient based optimization methods tend to stuck at local
minima; efficient methods for overcoming shallow local
minima and searching the global minimum are needed.

New ideas are highly appreciated!
THANK YOU!