Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Mathematics and Computers in Simulation 80 (2010) 2245–2257
Adaptive sliding mode control of chaotic dynamical systemswith application to synchronization
Sara Dadras, Hamid Reza Momeni ∗Automation and Instruments Lab, Electrical Engineering Department, Tarbiat Modares University,
P.O. Box 14115-143, Tehran, Iran
Received 5 February 2009; received in revised form 7 February 2010; accepted 2 April 2010Available online 21 April 2010
Abstract
We address the problem of control and synchronization of a class of uncertain chaotic systems. Our approach follows techniquesof sliding mode control and adaptive estimation law. The adaptive algorithm is constructed based on the sliding mode control toensure perfect tracking and synchronization in presence of system uncertainty and external disturbance. Stability of the closed-loopsystem is proved using Lyapunov stability theory. Our theoretical findings are supported by simulation results.© 2010 IMACS. Published by Elsevier B.V. All rights reserved.
Keywords: Uncertain chaotic system; Synchronization; Sliding mode control; Adaptive control; Chattering phenomenon
1. Introduction
Dynamic systems described by nonlinear differential equations can be extremely sensitive to initial conditions.This phenomenon is known as deterministic chaos, which means that, although the system mathematical descriptionis deterministic, its behavior is still unpredictable [14].
Chaos phenomenon is an interesting subject in the nonlinear systems. The concept of controlling and synchronizationof chaotic systems have attracted many interests, since the evolutionary work on chaos control was first presented by Ottet al. in 1990 [24], followed by the Pyragas time-delayed auto-synchronization control scheme [28]; and the pioneeringwork on the synchronization of identical chaotic systems evolving from different initial conditions was first introducedby Pecora and Carroll [26], the same year. The possible applications of chaos control and synchronization arouse manyresearch activities in recent years. This fact has motivated researchers to seek for various effective methods to achievethese goals [3,7,22,33,36]. So, the chaos control and synchronization as well as their application have become thehotspot in nonlinear fields.
In literature, from the viewpoint that control theory is the origin of the techniques of chaos control, synchronizationof chaos has evolved somewhat in its own right [18]. From the other point of view, there are some works which dealwith the problem of chaos synchronization in the framework of nonlinear control theory [5,16,23]. So, the study ofchaos control and chaos synchronization unify due to this fact.
∗ Corresponding author. Tel.: +98 21 82883375.E-mail addresses: s [email protected] (S. Dadras), momeni [email protected] (H.R. Momeni).
0378-4754/$36.00 © 2010 IMACS. Published by Elsevier B.V. All rights reserved.doi:10.1016/j.matcom.2010.04.005

2246 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
In recent years, several strategies to control and synchronize chaos have been developed, such as linear and non-linear feedback control [6,17,29], adaptive control [11,15,34,35,37], sliding mode control [9,20]. A widely consideredcontrolling method consists in adding an input control signal to attempt to stabilize an unstable equilibrium point oran unstable periodic orbit. This input control signal can be constructed using linear state feedback or nonlinear statefeedback [12].
In the past several decades, the sliding mode control (SMC) has been effectively applied to control the systemswith uncertainties because of the intrinsic nature of robustness of sliding mode [27]. However, the SMC suffers fromthe problem of chattering, which is caused by the high-speed switching of the controller output in order to establish asliding mode. The undesirable chattering may excite the high-frequency system response and result in unpredictableinstabilities [32].
The adaptive techniques have been widely applied to control and synchronize chaotic systems [15,31]. Recently,researchers have utilized the adaptive techniques together with the sliding mode control for many engineering systemsto smooth the output from a sliding mode controller and alleviate the chattering in the pure SMC [8,27].
In this paper, we address chaos control and synchronization using sliding mode theory. In the second section,dynamics of the system is described and an appropriate sliding surface is selected. In the third section, the adaptivesliding mode control (ASMC) scheme is briefly introduced. The proposed scheme is fairly simple in comparison withother works [21,38] and decreases the cost and complexity of the closed-loop system. Besides, this controller reducesthe chattering phenomenon and guarantees some properties, such as the robust performance and stability propertiesin presence of parameter uncertainties and external disturbance. Then, stability of the proposed scheme is analyzed.In Section 5, Genesio system [13] is considered to verify the validity of proposed control scheme by a computersimulation, respectively.
Many approaches have been presented for the synchronization of chaotic systems, but in most of them have beenassumed that the master and slave system are the same [7,39]. Hence, the synchronization of two different chaoticsystems plays a significant role in practical applications [10,25,30,31]. This problem becomes more difficult in presenceof environmental disturbance, measurement noise, or if the two chaotic systems have some uncertainties. In Section4, synchronization of two different chaotic systems via the ASMC is investigated. Theoretical results are verified viasimulating the synchronization of Genesio system [13] and Arneodo system [1]. At the end, conclusion is presented.
2. System description for uncertain chaotic system with ASMC
Generally, the nonlinear differential equations are only an approximate description of the actual plant due to thepresence of various uncertainties. Let the chaotic dynamical systems be represented in the Brunovsky form [2] by thefollowing differential equations:{
xi = xi+1, 1 ≤ i ≤ n − 1,
xn = f0(X, t) + �f (X, t) + d(t) + u(t) X = [x1, x2, ..., xn]T ∈ Rn,(1)
where X(t) = [x1(t), x2(t), . . . , xn(t)]T = [x(t), x(t), . . . , x(n−1)(t)]T ∈ Rn is the state vector, f0(X,t) is given as nonlin-
ear function of X and t, �f(X,t) is time-varying, not precisely known, and uncertain part of chaotic system, u(t) ∈ R isthe control input, and d(t) is the external disturbance of system (1). In general the uncertain term �f(X,t) and disturbanceterm d(t) are assumed bounded, i.e.:
|�f (X, t)| ≤ α and |d(t)| ≤ β, (2)
where α and β are positive.The control problem is to induce the system to track an n-dimensional desired vector Xd (i.e. the original nth order
tracking problem of state xd(t)), Xd = [xd1, xd2, . . . , xdn]T = [xd, xd, . . . , x(n−1)d ]
T ∈ Rn, which belong to a class ofcontinuous function on [t0, ∞). Let’s the tracking error be as:
E(t) = X(t) − Xd(t) = [x(t) − xd(t), x(t) − xd(t), . . . , x(n−1)(t) − x(n−1)d (t)]
T = [e(t), e(t), . . . , e(n−1)(t)]T
= [e1(t), e2(t), . . . , en(t)]T . (3)

S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2247
The control goal considered in this paper is such that for any given target orbit Xd(t), a SMC is designed, such that theresulting state response of tracking error vector satisfies:
limt→∞ ‖E(t)‖ = lim
t→∞ ‖X(t) − Xd(t)‖ → 0, (4)
where ||·|| is the Euclidean norm of a vector [19].In the traditional SMC, a switching surface representing a desired system dynamics is considered as follows:
s = en +n−1∑i=1
ciei. (5)
The switching surface parameters ci are selected to be positive such that the polynomial λn−1 + cn−1λn−2 + . . . +
c2λ + c1 is Hurwitz (i.e. all the roots of the characteristic polynomial have negative real parts with desirable poleplacement). The control u is designed to guarantee that the states are hitting on the sliding surface s = 0 (i.e. to satisfythe reaching condition ss < 0). When the closed-loop system is in the sliding mode, it satisfies s = 0 and then thecontrol law is obtained by
u = ueq + ur = ueq + K sgn(s) = −f0(X, t) − �f (X, t) − d(t) −n−1∑i=1
ciei+1 + x(n)d (t) + K sgn(s). (6)
where K is the switching gain. In practical system, the system uncertainty �f(X,t) and external disturbance d(t) areunknown and the implemented overall control input is modified as:
u = −f0(X, t) −n−1∑i=1
ciei+1 + x(n)d (t) + K sgn(s). (7)
Fig. 1. The chaotic trajectories of uncertain Genesio system.

2248 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
A useful method that is usually used to reduce the chattering which is caused by the traditional SMC is the adaptivetechnique. Here, an adaptive method is proposed to solve the chattering problem.
The adaptive sliding mode control law for system (1) is
u = −f0(X, t) − γξ(λ, s), (8)
where ξ(λ, s) is a hyperbolic function:
ξ(λ, s) = tanh(λs). (9)
and the adaptive law is designed as:
˙γ = k1eξ
(∂x
∂u
),
˙λ = k2e(1 − ξ2)s
(∂x
∂u
),
(10)
where k1 and k2 are positive constants.
3. Stability analysis
Theorem 1. Consider the system (1) is controlled by u(t) in (7). Then the condition ss < 0 is guaranteed and theerror trajectories converge to the sliding surface (5).
Fig. 2. The time response of system states, sliding surface and the control input for regulating to the desired orbit xd = sin(2t).

S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2249
Proof Using (1), (5), and (7), direct differentiation of s yields:
s = en +n−1∑i=1
ciei (11)
Multiplying both sides of Eq. (11) with s yields:
ss = s
[en +
n−1∑i=1
ciei
]= s
[f0(X, t) + �f (X, t) + d(t) + ueq + ur − x
(n)d (t) +
n−1∑i=1
ciei+1
]
= s[�f (X, t) + d(t) + Ksgn(s)] ≤ α |s| + β |s| + K |s| = −[−K − (α + β)] |s| . (12)
If we select K < −(α + β) in Eq. (12), one can conclude that the reaching condition (ss < 0) is always satisfied andthe error trajectories converge to the sliding surface. When the control scheme drive the trajectories to the slidingmode s = 0, it can be declared that the error declines asymptotically on the sliding surface (5), because each root of thecharacteristic polynomial has negative real part. Thus the proof is achieved completely.�
Theorem 2. Consider the uncertain chaotic dynamical system (1). The closed-loop system with the control law (8)and (9), and the adaptation law (10) will be asymptotically stable and the tracking error is eventually diminished.
Proof Using the Lyapunov stability method, we can choose a Lyapunov function candidate, such as:
V = 1
2e2. (13)
Fig. 3. Adaptive parameters γ and λ versus time for regulating to the desired orbit xd = sin(2t).
2250 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
By direct differentiation of Eq. (13), we can obtain:
dV
dt= ∂V
∂e
∂e
∂x
∂x
∂u
∂u
∂γ
∂γ
∂t+ ∂V
∂e
∂e
∂x
∂x
∂u
∂u
∂λ
∂λ
∂t. (14)
Thus, we have
V = ∂V
∂e
∂e
∂x
∂x
∂u
[∂
∂γ(−f0(X, t) − γ(tanh(λs)))
∂γ
∂t+ ∂
∂λ(−f0(X, t) − γ(tanh(λs)))
∂λ
∂t
]
= −e∂x
∂u[(tanh(λs)) ˙γ + γs(1 − tanh2(λs)) ˙λ], (15)
Substituting Eq. (10) into (15) yields:
V = −k1e2(
∂x
∂u
)2
(tanh(λs))2 − k2e
2(
∂x
∂u
)2
(1 − tanh2(λs))2γs2 ≤ −ω(t) ≤ 0, (16)
where ω(t) = e2(∂x/∂u)2[k1(tanh(λs))2 + k2(1 − tanh2(λs))
2γs2] is positive. Now by integrating (16), from zero to t,
one has:
V (0) ≥ V (t) +∫ t
0ω(λ) dλ (17)
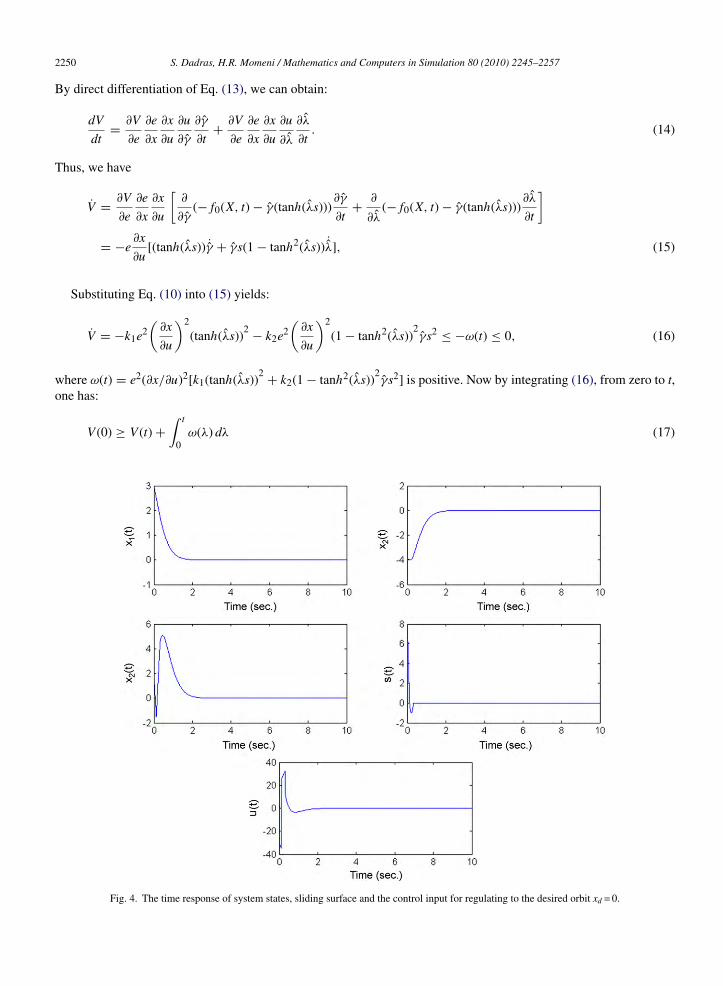
Fig. 4. The time response of system states, sliding surface and the control input for regulating to the desired orbit xd = 0.

S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2251
Since V ≤ 0 while V (0) − V (t) ≥ 0 and finite, as defined, it can be concluded that limt→∞
∫ t
0 ω(λ) dλ exists and is finite.
Therefore, according to Barbalat lemma [32], we find:
limt→∞ω(λ) = lim
t→∞
(e2(
∂x
∂u
)2
[k1(tanh(λs))2 + k2(1 − tanh2(λs))
2γs2]
)= 0 (18)
So, from Eq. (18), it can be inferred that s reaches zero in finite time, and e = 0. Therefore, it can be declared that thetracking error will be finally eliminated.�
4. Synchronization via adaptive sliding mode controller
Next, we consider the chaos synchronization, from a dynamical control perspective. In this case, the chaos syn-chronization can be regarded as a model-tracking problem, in which the response system, can track the drive systemasymptotically. We consider the slave system (1) to follow the master chaotic system with the following dynamics:{
yi = yi+1, 1 ≤ i ≤ n − 1,
yn = f0(Y, t) + �fm(Y, t) + dm(t) Y = [y1, y2, . . . , yn]T ∈ Rn,(19)
then states of the master and slave system will be synchronized. It is worth to notice that Y (t) =[y1(t), y2(t), . . . , yn(t)]T = [y(t), y(t), . . . , y(n−1)(t)]
T ∈ Rn is the state vector of the master system, f0(Y,t) is the knownnonlinear dynamic part of master system, �f(Y,t) is time-varying, not precisely known, and uncertain part of mastersystem, and dm(t) is the external disturbance of system (19). This hypothesis is not restrictive as it can be satisfied bymany chaotic systems in literature, such as Genesio system [13], Arneodo system [1] and Duffing–Holmes system [4].
Fig. 5. Adaptive parameters γ and λ versus time for regulating to the desired orbit xd = 0.

2252 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
As it was said in the previous section, the uncertain term �fm(Y,t) and disturbance term dm(t) are assumed bounded,i.e.:
|�fm(Y, t)| ≤ αm and |dm(t)| ≤ βm, (20)
where αm and βm are positive.Thus, to obtain synchronization, we can modify the error Eq. (3) as follows:
E = Xs − Ym = [x1s − y1m, x2s − y2m, . . . , xns − ynm]T = [e, e, . . . , en−1]T = [e1, e2, . . . , en]T (21)
If the error states off the coupled system are defined as Eq. (21), then the dynamic equations of these errors can bedetermined directly by subtracting Eq. (19) from Eq. (1), to yield:{
ei = ei+1, 1 ≤ i ≤ n − 1,
en = F + �F + D(t) + u(22)
where
F = f0s(X, t) − f0m(Y, t)
�F = �fs(X, t) − �fm(Y, t)
D = ds(t) − dm(t)
(23)
in which, F is known nonlinear function, �F is time-varying, not precisely known, and uncertain part of error dynamicalsystem (22), and D is the external disturbance of the error system (22).
The same as what we do before in Eqs. (5)–(7), we have
u = −F − γξ(λ, s) = −f0s(Xs, t) + f0m(Ym, t) − γξ(λ, s). (24)
Fig. 6. The chaotic trajectories of uncertain Arneodo system.

S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2253
where ξ(λ, s) is defined as:
ξ(λ, s) = tanh(λs). (25)
and the adaptive laws are designed as:
˙γ = k3eξ
(∂xs
∂u
),
˙λ = k4e(1 − ξ2)s
(∂xs
∂u
),
(26)
where k3 and k4 are positive constants.Proof of the stability of above formula is the same as Theorem 1 and Theorem 2.
5. Simulation results
This section of the paper presents two illustrative examples to verify and demonstrate the effectiveness of theproposed control scheme. The simulation results are carried out using the MATLAB software. The fourth orderRunge–Kutta integration algorithm was performed to solve the differential equations. A time step size 0.001 wasemployed.
Consider the Genesio chaotic system as follows:⎧⎪⎨⎪⎩
x1 = x2
x2 = x3
x3 = −cx1 − bx2 − ax3 + x21,
(27)
Fig. 7. The time response of master system and slave system states.
2254 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
where x1, x2, x3 are state variables, and a, b and c are the positive real constants satisfying ab < c. For instance, theGenesio system is chaotic for the parameters a = 1.2, b = 2.92, c = 6.
Consider that system (27) is perturbed by an uncertainty term �f(X,t) and excited by a disturbance term d(t), addedto its third equation. The uncertain Genesio system can be written as:⎧⎪⎨
⎪⎩x1 = x2
x2 = x3
x3 = −cx1 − bx2 − ax3 + x21 + Δf (X) + d(t) + u(t).
(28)
From (8), the continuous control input is determined as:
u = cx1 + bx2 + ax3 − x21 − γξ(λ, s). (29)
The system is perturbed by an uncertainty term �f (X, t) = 0.1 sin(πx1) sin(2πx2) sin(3πx3) and d(t) = 0.1 cos(3t),where |Δf(X)| ≤ α = 0.1 and |d(t)| ≤ β = 0.1. The uncontrolled uncertain system (28) (i.e. u(t) = 0) is also chaotic andretains one positive Lyapunov exponent as shown in Fig. 1. The simulation is done with the initial value [x1 x2x3]T = [3 −4 2]T, c1 = 10, c2 = 6, k1 = 10, k2 = 15, λ0 = 15, and γ0 = 30.
The simulation results are shown in Figs. 2–5 under the proposed ASMC (29) with the adaptation algorithm (9) and(10). Fig. 2 represents respectively the state time response, sliding surface dynamics and control input for tracking aperiodic orbit xd = sin(2t). It can be seen that the dynamic of system states are stabilized to a periodic motion. Fig. 4shows the state time responses, corresponding s(t) and control input for regulating to xd = 0. It can be seen that chatteringdoes not appear, due to continuous control. The time responses of adaptation parameters are shown in Figs. 3 and 5respectively.
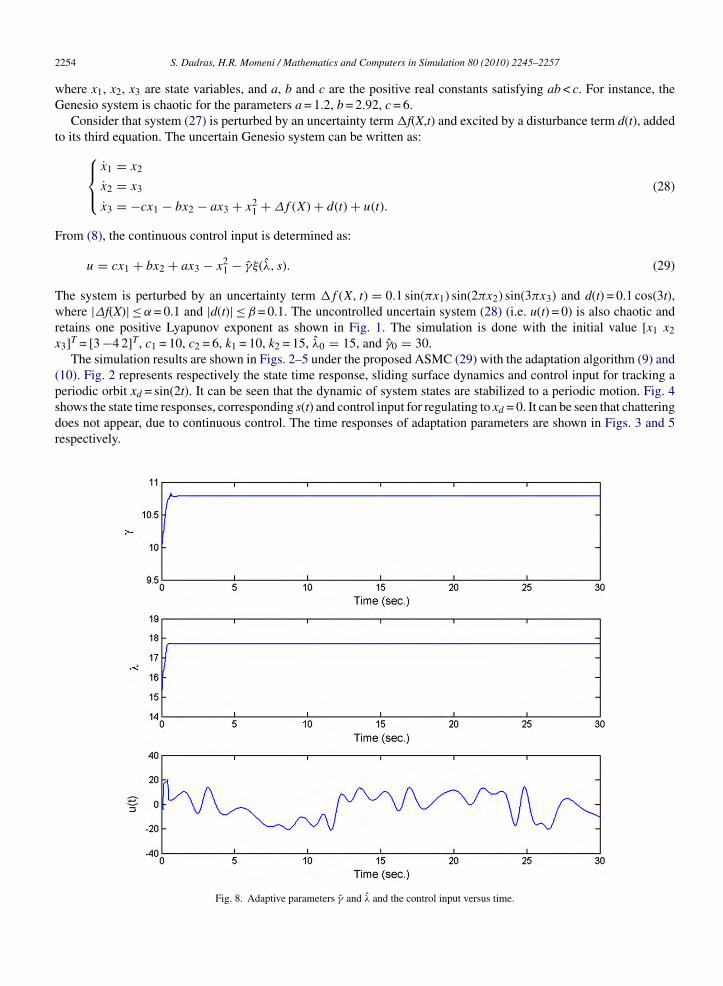
Fig. 8. Adaptive parameters γ and λ and the control input versus time.
S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2255
Next, consider the Arneodo chaotic system:
⎧⎪⎨⎪⎩
y1 = y2
y2 = y3
y3 = −b1y1 − b2y2 − b3y3 + b4y31 + �fm(Y ) + dm(t)
(30)
with b1 = −5.5, b2 = 3.5, b3 = 1, b4 = −1, is the master system, and Genesio chaotic system (28) is the slave. The statetrajectories of the uncertain Arneodo system (30) are depicted in Fig. 6.
From (24), the continuous control input is determined as:
u = cx1s + bx2s + ax3s − x21s − b1y1m − b2y2m − b3y3m + b4y
31m − γξ(λ, s). (31)
The control parameters for the controller (31) were chosen as k3 = 5, k4 = 15, λ0 = 15, and γ0 = 10. The simulation isdone with the initial value [x1s x2s x3s]T = [3 −4 2]T, [y1m y2m y3m]T = [1 −1 0]T and the sliding surface parameters arec1 = 10, c2 = 6. The slave system is perturbed by an uncertainty term �fs(Xs, t) = 0.1 sin(πx1s) sin(2πx2s) sin(3πx3s)and ds(t) = 0.1 sin(3t), where |Δf(Xs)| ≤ α = 0.1 and |ds(t)| ≤ β = 0.1 and these parameters for the master system are setas �f (Ym, t) = 0.2 sin(y1m) sin(y2my3m) and dm(t) = 0.2 sin(2t) where |Δf(Ym)| ≤ αm = 0.2 and |dm(t)| ≤ βm = 0.2.
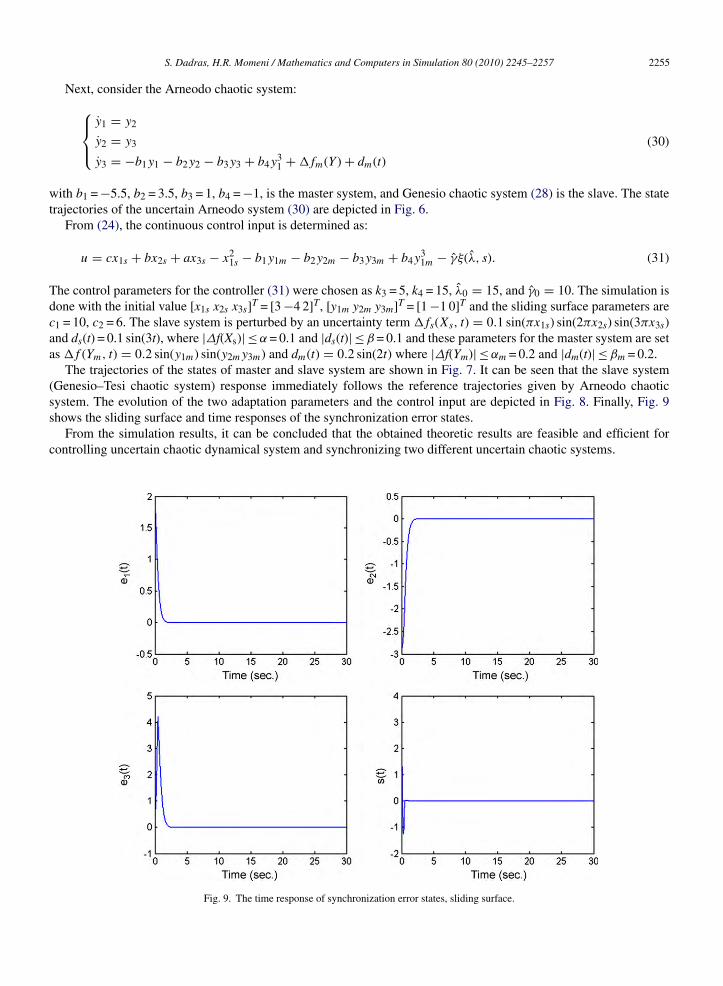
The trajectories of the states of master and slave system are shown in Fig. 7. It can be seen that the slave system(Genesio–Tesi chaotic system) response immediately follows the reference trajectories given by Arneodo chaoticsystem. The evolution of the two adaptation parameters and the control input are depicted in Fig. 8. Finally, Fig. 9shows the sliding surface and time responses of the synchronization error states.
From the simulation results, it can be concluded that the obtained theoretic results are feasible and efficient forcontrolling uncertain chaotic dynamical system and synchronizing two different uncertain chaotic systems.
Fig. 9. The time response of synchronization error states, sliding surface.

2256 S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257
6. Conclusion
This work presents the control and synchronization of chaos by designing the adaptive sliding mode controller.In the proposed approach, by applying appropriate control signal based on adaptive update law, a continuous controlsignal is achieved and stability of the system is guaranteed. Asymptotic stability of the closed-loop nonlinear system isguaranteed by means of Lyapunov stability theory. As the simulations show, the new controller could track and stabilizethe desired trajectory within a short time not only to a fixed point, but also to an arbitrary orbit. The most distinguishedfeature of our controller is that it can be applied to synchronize two different chaotic systems. Meanwhile, numericalsimulations illustrate the robustness of the controller against model uncertainty and noise disturbance; and it is a goodsolution to the chattering problem in the traditional sliding mode control.
References
[1] A. Arneodo, P.H. Coullet, E.A. Spiegel, The dynamic of triple convection, Geophys. Asfrophys. Fluid Dyn. 31 (1985) 1–48.[2] P. Brunovsky, A classification of linear controllable systems, Kybernetika 6 (1970) 176–188.[3] H.J. Cao, X.B. Chi, G. Chen, Suppressing or inducing chaos in a model of robot arms and mechanical manipulators, J. Sound Vib. 271 (2004)
705–724.[4] W.D. Chang, J.J. Yan, Adaptive robust PID controller design based on a sliding mode for uncertain chaotic systems, Chaos Solitons Fract. 26
(2005) 167–175.[5] G. Chen, Controlling Chaos and Bifurcations in Engineering Systems, CRC Press, Boca Raton, FL, 2000.[6] G. Chen, X. Dong, On feedback control of chaotic continuous time systems, IEEE Trans. Circ. Syst. I 40 (1993) 591–601.[7] K.M. Cuomo, A.V. Oppenheim, S.H. Strogatz, Synchronization of Lorenz-based chaotic circuits with applications to communications, IEEE
Trans. Circ. Syst. II 40 (1993) 626–633.[8] S. Dadras, H.R. Momeni, Control uncertain Genesio–Tesi chaotic system: adaptive sliding mode approach, Chaos Solitons Fract. 42 (2009)
3140–3146.[9] S. Dadras, H.R. Momeni, V.J. Majd, Sliding mode control for uncertain new chaotic dynamical system, Chaos Solitons Fract. 41 (2009)
1857–1862.[10] S. Etemadi, A. Alasty, H. Salarieh, Synchronization of chaotic systems with parameter uncertainties via variable structure control, Phys. Lett.
A 357 (2006) 17–21.[11] M. Feki, An adaptive feedback control of linearizable chaotic system, Chaos Solitons Fract. 15 (2003) 883–890.[12] M. Feki, Sliding mode control and synchronization of chaotic systems with parametric uncertainties, Chaos Solitons Fract. (2008),
doi:10.1016/j.chaos.2008.05.022.[13] R Genesio, A. Tesi, Harmonic balance methods for the analysis of chaotic dynamics in nonlinear systems, Automatica 28 (1992) 531–548.[14] R.C. Hilborn, Chaos and Nonlinear Dynamics: An Introduction for Scientists and Engineers, Oxford University Press, New York, NY, 2000.[15] C. Hua, X. Guan, Adaptive control for chaotic systems, Chaos Solitons Fract. 22 (2004) 55–60.[16] L. Huang, R. Feng, M. Wang, Synchronization of chaotic systems via nonlinear control, Phys. Lett. A 320 (2004) 271–275.[17] G.P. Jiang, G. Chen, W.K.S. Tang, A new criterion for chaos synchronization using linear state feedback control, Int. J. Bifurcat. Chaos 13
(2003) 2343–2351.[18] T. Kapitaniak, Controlling Chaos, Academic Press, San Diego, CA, 1996.[19] K. Khalil, Nonlinear Systems, Prentice Hall, Englewood Cliffs, NJ, 1996.[20] K. Konishi, M. Hirai, H. Kokame, Sliding mode control for a class of chaotic systems, Phys. Lett. A 245 (1998) 511–517.[21] W.L. Li, K.M. Chang, Robust synchronization of drive-response chaotic systems via adaptive sliding mode control, Chaos Solitons Fract. 39
(2009) 2086–2092.[22] K. Murall, M. Lakshmanan, Secure communication using a compound signal from generalized synchronizable chaotic system, Phys. Lett. A
241 (1998) 303–310.[23] H. Nijmeijer, A dynamical control view on synchronization, Physica D 154 (2001) 219–228.[24] E. Ott, C. Grebogi, J.A. Yorke, Controlling chaos, Phys. Lett. A 64 (1990) 1196–1199.[25] J.H. Park, Chaos synchronization between two different chaotic dynamical systems, Chaos Solitons Fract. 27 (2006) 549–554.[26] L.M. Pecora, T.L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett. 64 (1990) 821–824.[27] W. Perruquetti, J.P. Barbot, Sliding Mode Control in Engineering, Marcel Dekker Inc., New York, NY, 2002.[28] K. Pyragas, Continuous control of chaos by self-controlling feedback, Phys. Lett. A 170 (1992) 421–428.[29] M. Rafikov, J.M. Balthazar, On control and synchronization in chaotic and hyperchaotic systems via linear feedback control, Commun. Nonlinear
Sci. Numer. Simulat. 13 (2008) 1246–1255.[30] M. Roopaei, M. Zolghadri Jahromi, Synchronization of two different chaotic systems using novel adaptive fuzzy sliding mode control, Chaos
18 (2008) 033133.[31] H. Salarieh, M. Shahrokhi, Adaptive synchronization of two different chaotic systems with time varying unknown parameters, Chaos Solitons
Fract. 37 (2008) 125–136.[32] J.E. Slotine, W. Li, Applied Nonlinear Control, Prentice Hall, Englewood Cliffs, NJ, 1991.[33] H. Sun, H. Cao, Chaos control and synchronization of a modified chaotic system, Choas Solitons Fract. 37 (2008) 1442–1455.

S. Dadras, H.R. Momeni / Mathematics and Computers in Simulation 80 (2010) 2245–2257 2257
[34] Y.W. Wang, C. Wen, M. Yang, J.W. Xiao, Adaptive control and synchronization for chaotic systems with parametric uncertainties, Phys. Lett.A 372 (2008) 2409–2414.
[35] C.W. Wu, T. Yang, L.O. Chua, On adaptive synchronization and control of nonlinear dynamical systems, Int. J. Bifurcat. Chaos 6 (1996)455–472.
[36] K. Yagasaki, Chaos in a pendulum with feedback control, Nonlinear Dyn. 6 (1994) 125–142.[37] M.T. Yassen, Adaptive chaos control and synchronization for uncertain new chaotic dynamical system, Phys. Lett. A 350 (2006) 36–43.[38] H.T. Yau, Design of adaptive sliding mode controller for chaos synchronization with uncertainties, Chaos Solitons Fract. 22 (2004) 341–347.[39] Q. Zhang, J. Lu, Chaos synchronization of a new chaotic system via nonlinear control, Chaos Solitons Fract. 37 (2008) 175–179.





























