Embed Size (px)
Citation preview

Adaptive sampling in environmental Robotics
Mohammad Rahimi, Gaurav sukhatme, William Kaiser,
Mani Srivastava, Deborah Estrin

Motivation…
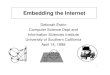
NIMS: Networked Infomechanical Systems

InternetTelephone/ISP
Data Base
WRCCRFCrane Site Dry Shack
84
91NIMS Node
Met Node(Ta, RH, PAR)
Solar Cell
Battery Pack
Power DistributionCable
Visible ImagerWith Pan/Tilt
Actuator
47 m
50 m

Science Objectives
C H2O Q
C13/C12
C13/C12
C13/C12
T, RH, Wind
T, RH, Wind
T, RH, Wind
T, RH, Wind
Growth Growth

NIMS Prototype Deployment

NIMS Prototype Deployment

Problem
• Creating a dynamic Map of the environment• Based on the carrying sensors (attributes)

Approach
• The robot (shuttle) is an agent• gather Geostatistics information• Refresh those statistics as fast as possible

Digitizing robot’s world
0,0
Cell size that we call it a pixel is a x*x. pixel is the distance that shuttle moves atomically
Obstacles
Shuttle Patrol AreaShuttle Patrol Area

Assumptions
• Shuttle is certain about the location• Sensor reading error is zero• Environment is static in circuit convergence
time• Warning to the user to reduce coverage or
expected accuracy otherwise

Sampling Policy
• Stratified Sampling
• Divide the population into subpopulations
• Extremely better performance with some degree of apriority domain knowledge
• Random sampling
• Mean proportional to cell size

Feedback
• Using variance of data to classify a region• Vaiance/Mean < Expected error
or• Variance < Sensor Noise

Divide and Conquer
• Stratify the current cell into four • μ = α * cell size (μ is mean of step size) • Collect data in current cells (Random)• Calculate the variance • Iterate until variance is below threshold

Closed Loop System
Estimation
error
StratificationPolicy
+
-
Map
Acceptable error
Readingpoints

Result Of the Algorithm
n Log (n)
n
•Quad-tree Map of the variance of the environment•Shuttle step-size is random but proportional to how deep in the tree it is

Initial Results

Wish List
• Adding time domain• Static sensors as sample support