Embed Size (px)
Citation preview

Adaptive Control
Adaptation dynamic process by which the controlleradjusts its interaction with a systemin order to carry out an objective orreach a goal w o exact knowledge ofthe system
Some incomplete history19505 gain scheduling
early Model Reference Adaptive ControlMRAC
1958 R Kalman self tuning controllerregulator for the linear quadraticproblem
19605 stability of adaptive controllersLyapunov stabilityadaptation learning Feldbaum TsypkiD
1966 Parks Lyapunov redesign approach toMRAC
19705 Stability analysis Narendra Morse
19805 limitations Rohrs et al sensitivity toUnmodeled dynamics1983 Morse's conjecture X axtbu
a C IRb Fo
cannot stabilize w o knowledge of sign b1983 Nussbaum disproves Morse's conjecture1984 Willems Byrnes simplified Nussbaum's
constructionexploration us exploitation

Ex ample adaptive regulationin 0kt u x t C IR scalar state
ult EIR inputGEIR is unknown
Goali output regulation1 E o as e ault bounded
what if 0 is knownO o u 0 is optimalUEO x t x o eat 30 since Qso
0 0 U x
X x x t _eco e t o
O o u Otl x
X Ox Ot Dx
What if 0 is unknown
Adaptive control law
X Ox tu u Iti x
onfto.inestimate
tuning law for the controller
Closed loop system plant controller
ix ox to 1 x dsfaf.fiyachcireYalation72
Xlt 30 as e

Note the closed loop system is nonlinear eventhough the unknown plant is linearthe controller is dynamicstate
i.e has a
Ict o t ft x s ds
We will use Lyapunov stability theoryx 1
22 first attempt
t i TtVlxltl2 kit ItX t o Ect 1 ect
unknown but fixedI I 1 XtCan be 70
V x Lzx2 may not be the best choice
Try Vex 8 thx Icon ofdepends on both of the state variables tando
j e 2 it For
XX t J o

x o I 1 X t to 03 2
et t 0 8 2t 8 03 2
so
Is this enough to give xlt o as t
Review Lyapunov stabilityI f x f 107 0 Ceo is an
equilibriumIs x o a stable equilibrium
Stability V E o FS o s.t
4071 8 Htt E at o
i
Asymepthstability stability attractivityFS o s.tt KC 071 8 him t.lt o
C a
Global Asymptotic Stability GAS
V E o V x o xltll.SE after some toasymptotic stability
Thy Lyapunov stability criterionX f't
et V be a C and positive definite fan of stateX 70 VX and e o iff X o
Define its time derivative along X ft by
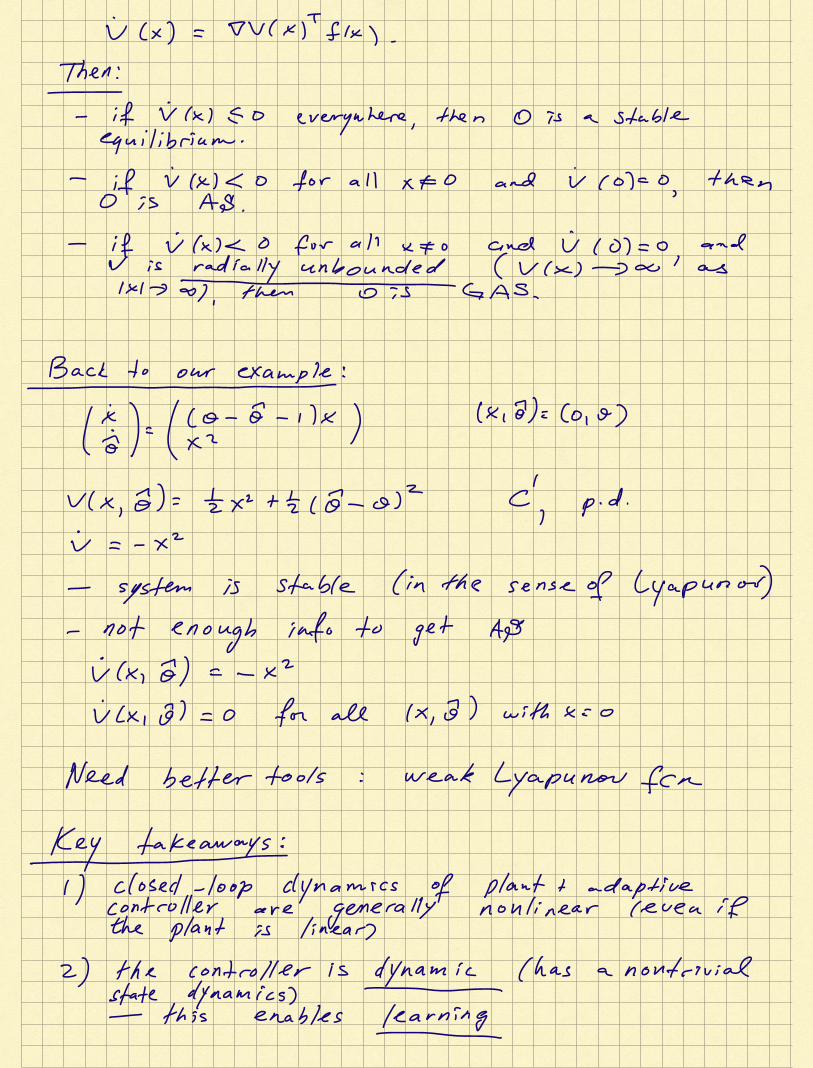
x TVC effleythen
if x Eo everywhere then 0 is a stableequilibriumif i e 0 for all O and i co o then0 is AD
if i a 0 for all e o and V 07 0 andis radially unbounded e or as
I i GAS
Backtanpleto 43 E k Kid e Cao
x f text's to of d p d
V x2
system is stable in the sense of Lyapunovnot enough info to get ASCx I 2
Lx 07 0 for all IX 8 with keo
Need better tools weak Lyapunov for
Keyt ays1 closed loop dynamics of plant t adaptivecontroller are generally nonlinear even if
the plant is linear2 the controller is dynamicstate dynamics
has a nontrivial
this enables tearing
3 standard Lyapunov stability theory not strongenough need to account for a
life B X indep of I
4 I need not converge to 0