Embed Size (px)
Citation preview

Ad Hoc Networks xxx (2014) xxx–xxx
Contents lists available at ScienceDirect
Ad Hoc Networks
journal homepage: www.elsevier .com/locate /adhoc
ToA-TS: Time of arrival based joint time synchronizationand tracking for mobile underwater systems
http://dx.doi.org/10.1016/j.adhoc.2014.10.0101570-8705/� 2014 Elsevier B.V. All rights reserved.
⇑ Corresponding author.E-mail addresses: [email protected] (J. Yi), [email protected]
(D. Mirza), [email protected] (R. Kastner), [email protected](C. Schurgers), [email protected] (P. Roberts), [email protected](J. Jaffe).
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival based joint time synchronization and tracking for mobile undesystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.10.010
Jinwang Yi a, Diba Mirza b,⇑, Ryan Kastner b, Curt Schurgers c, Paul Roberts d, Jules Jaffe d
a Xiamen University, Chinab Department of Computer Science and Engineering, University of California, San Diego, 9500 Gilman Drive, La Jolla, CA 92093, United Statesc Qualcomm Institute, Calit2, University of California, San Diego, United Statesd Scripps Institution for Oceanography, 8622 Kennel Way, La Jolla, CA 92037, United States
a r t i c l e i n f o
Article history:Received 5 March 2014Received in revised form 6 October 2014Accepted 10 October 2014Available online xxxx
Keywords:Underwater networksReal-time trackingAcoustic networks
a b s t r a c t
Time synchronization and localization are key requirements for distributed underwatersystems consisting of numerous low-cost submersibles. In these systems, submersiblesare highly resource constrained and typically have limited acoustic communication capa-bility. We investigate the problem of tracking submersibles that only have the capability ofreceiving acoustic signals. Traditional Long Base Line (LBL) systems track the location ofsubmersibles by providing a GPS-like infrastructure that consists of a few reference bea-cons at known locations. In these systems the unknown positions of submersibles are esti-mated from beacon transmissions using time-difference-of-arrival (TDoA) basedlocalization. As such TDoA makes the key assumption that beacon transmissions occurnearly concurrently in time. While this assumption is ensured in small LBL deploymentsit does not hold as the size of the system scales up. In this paper we identify scenarioswhere signals from multiple beacons are significantly lagged in time. We further identifythe motion of the submersible between signal arrivals as a key factor that deterioratesthe performance of TDoA, when transmissions are not concurrent. To address this problemwe propose to track the submersible while performing time-synchronization. Our pro-posed technique, called Time of Arrival based Tracked Synchronization (ToA-TS) essentiallyextends GPS like localization for scenarios where beacon transmissions are not concurrentand submersibles are not capable of two-way communication. We show the benefit of ourproposed scheme by comparing its performance to other localization techniques usingexperimentally obtained data.
� 2014 Elsevier B.V. All rights reserved.
1. Introduction spatial scales (tens to hundreds of meters). To aid such
Mobile underwater submersibles are widely used inmany oceanographic applications. As submersibles becomemore agile, they present new opportunities to studyoceanic phenomena that are dynamic and vary at smaller
exploration there has been a growing interest to deploynumerous low-cost and compact submersibles as swarmsthat operate in a distributed and coordinated fashion. Acrucial feature of such distributed systems is that the costand capabilities of individual submersibles are scaleddown in order to scale up the spatial extent and densityof the sampling system. As a result, submersibles arehighly energy constrained, and typically have very short-range acoustic communication or in many cases only havethe ability to act as passive receivers.
rwater

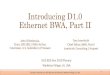
Fig. 1. Signals received at a submersible from four beacons in (a) LBLsystems and (b) Swarm systems.
2 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
Determining the location and time of submersiblesunderwater in a global frame of reference are two keyrequirements of distributed systems. Global position andtime can be easily obtained from GPS for terrestrial sys-tems. However, due to the unavailability of GPS underwa-ter, traditional underwater acoustic navigation techniquestypically rely on a GPS-like infrastructure to track submers-ibles. This infrastructure consists of a few reference bea-cons (usually four) that are deployed in preciseconfigurations as in Long Baseline Systems (LBL) [1]. Thebeacons essentially act as GPS satellites for underwater bydeducing their own position and time from GPS. The sub-mersibles position and local time are jointly estimated frommeasurements of the time-difference-of-arrival (TDoA) ofacoustic signals that are transmitted by the beacons.1 TDoAis especially relevant to tracking and synchronizing low-costsubmersibles that have limited acoustic communicationcapability and can seldom transmit to surface beacons. How-ever, TDoA makes two crucial assumptions during the inter-val that the time-of-arrival measurements are obtained (a)the submersible is stationary, and (b) the difference betweenthe global time according to beacons and the local time of thesubmersible, (i.e., clock offset) remains constant. In general,the position of the submersible changes due to its motionand the clock offset changes at an unknown rate, which isknown as the clock drift. Therefore, while the assumptionsmade by TDoA do not hold in general, they are satisfied inpractical LBL systems by ensuring that the submersiblereceives four signals in succession over a short time windowas depicted in Fig. 1(a). In such a scenario, the movement ofthe submersible is negligible during the signaling period.Similarly, its clock offset is virtually constant (i.e., the effectof drift is negligible). The problem that we address in thispaper is time synchronization and tracking submersibleswhen signals from multiple beacons no longer arrive concur-rently, but rather arrive over a much longer time epoch, T asdepicted in Fig. 1(b). We will explain shortly why this prob-lem arises in the context of swarm systems. The key point isthat when signals no longer arrive concurrently at each sub-mersible, two effects come into play (that are ignored byTDoA based localization): the submersible can significantlymove between signal arrivals and the clock offset may notremain constant over the signaling period due to the cumu-lative effect of clock drift. In this paper we identify scenarioswhere the error introduced due to these two factors becomessignificant for a nominal range of relevant parameters (adetailed discussion is presented in Section 3). When thereis significant motion between signal arrivals, in order to timesynchronize the submersible, it has to be additionallytracked over the time epoch T. Therefore, the key problemthat we will solve is joint time synchronization and trackingof submersibles based only on one-way acoustic transmis-sions from beacons. In the next section we delineate why thisproblem arises in the context of swarm systems and discussour solution strategy. Our proposed technique, called Time of
1 Other acoustic navigation techniques are also possible within this basicframework. We discuss these techniques in related work (Section 7).However, these approaches typically rely on bi-directional communicationwith beacons. Therefore, they are not suitable for tracking submersibleswith only receive capability.
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
Arrival based Tracked Synchronization (ToA-TS) extends GPSlike localization for scenarios where beacon transmissionsare not concurrent and submersibles are not capable oftwo-way communication.
In this paper we extend on our previous work in [2],where we proposed a joint approach to time synchroniza-tion and localization using the framework of factor-graphs.In particular, we improve the run-time of our originalfactor-graph based algorithm by bootstrapping from ananalytically obtained initial solution. In addition wepresent an extensive comparison of the performance ofToA-TS to other tracking techniques using experimentallyobtained data.
2. Problem motivation
In scenarios where beacon transmissions are spreadover a time window T, two key effects come into play.However, prior to discussing these effects in more detail,in this section we discuss why signals from transmissionsare likely to occur over longer time epochs in swarm sys-tems compared to traditional LBL deployments.
Traditional LBL systems are designed for small deploy-ments consisting of a few beacons (typically four), whoseacoustic transmissions can be received by all submersibleswithin the deployment. As such LBL provides sufficientlocalization accuracy for such deployments. This is becausesignals from few beacons can be scheduled to occur withina short time window. Since all the submersibles are withinthe communication range of the beacons, these signals alsoarrive at near concurrent times at each submersible asshown in Fig. 1(a). However, as the spatial extent and sizeof the system is scaled up, this scenario changes.
As the spatial extent of the deployment increases, morebeacons are required to provide sufficient acoustic cover-age for localizing submersibles. Further, these beaconsmay not be deployed in precise configurations. This makesit challenging to avoid collisions while meeting the signalconcurrency requirement of traditional LBL systems. Onepossible solution to this problem involves using orthogonalsignals for the beacon transmissions. However, even withthis approach, as the system scales, the number of beaconswould exceed the number of orthogonal signal dimensions.Further, such a solution is not possible in many narrow-band systems due to hardware constraints. We consider sit-uations where orthogonal signaling is not employed, either
ed joint time synchronization and tracking for mobile underwater0.010

J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 3
by design or due to scalability. In such systems, transmis-sions from multiple beacons have to be sufficiently laggedover a time epoch, T to avoid collisions. Given that propaga-tion delays are in the order of seconds, the time lag betweenbeacon transmissions is likely to be in the order of tens ofseconds or more. As a result transmissions from multiplebeacons can no longer be scheduled to occur concurrently.The crucial point here is that while we still propose a sys-tem where all beacons try to schedule their transmissionas close as possible in time, these transmissions cannot beconcurrent due to the size of the network. A submersiblewithin this network can only receive signals from a subsetof beacons. Further, this subset changes due to the motionof the submersible and possibly that of the beacons [3].Therefore, the time lag, dt between the signals received bya submersible from a random subset of beacons can besignificant as depicted in Fig. 1(b).
In such scenarios two additional factors come into play,which were previously ignored by TDoA, namely, themotion of the submersible and the drift in its local clockbetween signal arrivals. These uncertainties are differentfrom random measurement errors. We will make this dis-tinction as part of the problem formulation in Section 4.Later in the same section we discuss scenarios where thetwo factors under consideration, namely the motion ofthe submersible and the drift in the local clock can signif-icantly affect the performance of TDoA localization, whichassumes concurrent transmissions.
3. TDoA localization with non-concurrent signal arrivals
First, we briefly describe the time-difference-of-arrival(TDoA) method, which is typically used in LBL systems.In TDoA based localization the difference in the measuredtime of arrivals of signals received from a pair of beaconstranslates to the difference in range estimates with thosebeacons. As a result each estimate of time-difference givesrise to a hyperbola for the unknown position of the sub-mersible. A unique estimate of the submersibles positioncan be obtained by intersecting three such hyperbolas(obtained from four beacon transmissions). However, thistechnique requires that beacons transmit at near concur-rent times. For the scenario where transmissions arelagged, this approach essentially neglects the motion andclock drift of the submersible between signal arrivals. Inreality, both these factors add an uncertainty to the mea-sured time differences. As a result, each hyperbola thusobtained does not represent the submersibles position atany particular time. Therefore, the hyperbolas no longerintersect at a common point. A least squares approachcan still be used to obtain an estimate for the position.However, these uncertainties are likely to degrade the per-formance of TDoA based localization. Furthermore, as wewill show in the next section, the uncertainty due to theunknown clock offset and that due to vehicle motion canbe estimated with a more precise formulation of the prob-lem and velocity measurements obtained from an IMU(Inertial Measurement Unit). The key idea is to estimatethese uncertain parameters rather than treat them asrandom measurement errors.
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
4. Problem formulation
We consider the problem of tracking a submersibleusing acoustic messages that are transmitted at differenttimes by multiple reference beacons over a period T. Thebeacons deduce their location and time from GPS. How-ever, the submersible is not time-synchronized with thebeacons. Our goal is to estimate the Maximum Likelihood(ML) position and clock offset of the submersible over atime epoch T given the send and receive timestamps ofacoustic messages transmitted by the beacons and IMUmeasurements obtained during that time. Next, we presenta mathematical formulation of our tracking problem.
Each acoustic message transmitted by a beaconincludes the position of the beacon as obtained from GPSand a time stamp indicating the time it was sent accordingto global time. The receive time of the message is recordedaccording to the local clock of the submersible. However,the receive time of the acoustic message (in local time)cannot be determined exactly due to noise, surface reflec-tions and multipath. We definite the cumulative effect ofthese random errors as the error in the detecting the firstarrival of the signal and denote it as ek. The statistics of thiserror is known from previous experimental characteriza-tions performed in prior work [4,5]. We model the statis-tics as a zero mean Gaussian distribution with standarddeviation rR.
The difference in the send and receive times of theacoustic message relates the unknown position of the sub-mersible and its unknown clock offset, as given by Eq. (1).
kPiðtkÞ � PðtkÞk2=c ¼ diðtkÞ=c ¼ Tk;i � tk þ DðtkÞ þ ek ð1Þ
where c is the speed of sound in m=s; PiðtkÞ and PðtkÞ denotethe positions of beacon i and the submersible at the time ofmessage transmission, respectively. The transmit time ofthe kth message according to global time is denoted by tk.The receive time of the message from beacon i accordingto the submersible’s local time is denoted by Tk;i. We referto Tk;i � tk as the measured time-of-flight of the acousticmessage and denote it as miðtkÞ. DðtkÞ is the unknown clockoffset of the submersible at the time of messagetransmission.
Acoustic messages are received from multiple beaconsover a time epoch, T as depicted in Fig. 1(b). Contrary tothe assumption made by TDoA, the submersible’s clock-offset and position both vary during the time epoch T.
In particular, the clock-offsets at any two time instancestk and tkþ1 are related to each other via the clock drift,denoted as g, as per the following equation:
Dðtkþ1Þ ¼ DðtkÞ þ g � ðtkþ1 � tkÞ ð2Þ
In addition, the submersible’s motion may be signifi-cant during the signaling period. Therefore, we take thismotion into account by using measurements of the sub-mersible’s velocity that are obtained from an on-boardIMU. These measurements relate the position of the sub-mersible at consecutive time steps as follows:
~vk ¼ ðPðtkþ1Þ � PðtkÞÞ=ðtkþ1 � tkÞ þ ev;k ð3Þ
where ev ;k is the error in velocity measurements.
ed joint time synchronization and tracking for mobile underwater0.010

Fig. 2. Error in distance due to the submersible’s motion.
4 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
The problem that we address is to track the unknownposition and clock offset of the submersible using mea-surements obtained in intervals of duration T. As depictedin Fig. 1(b), this interval is chosen as the minimum time inwhich acoustic messages are received from at least fourunique beacons.
Note that TDoA based localization assumes that boththe position of the submersible and the clock offset remainconstant during this time. This amounts to making twoassumptions in our more generalized description of theproblem. The first assumption is that the cumulative effectof the clock drift, g � ðtkþ1 � tkÞ in Eq. (2), is negligible in thesignaling period T. The second assumption is that the dis-placement of the submersible, given by vk � ðtkþ1 � tkÞ, inEq. (3), is negligible in the signaling period T. From Eq.(1), we observe that if this were true, the number ofunknowns does not increase with each new time-of-flightmeasurement. The resulting problem is then solvable aslong as measurements are made with at least four beacons.We compare our proposed solution with this approach inSection 7.
On the other hand our proposed solution only assumesthat the effect of the clock drift is negligible in the signalingperiod. However, it takes the motion of the submersibleinto account. It is important to note that the uncertaintydue to clock drift and that due to the vehicle displacementdo not act in the same way on the ranging uncertainty. Inparticular the clock offset is common (i.e., the same) to therange estimates with all the beacons, whereas the positionuncertainty due to motion is different and independent foreach beacon.
In the next subsection, we will motivate the assump-tions made by our proposed scheme by identifying scenar-ios where the uncertainty due to motion and/or the clockdrift become significant. We consider uncertainties greaterthan a meter to be significant because errors due to noise,surface reflections and refraction and even hardware areexpected to be of that order [4,5]. For this analysis wedenote the lag between a pair of signals as dt (s), the sub-mersible’s speed in the horizontal plane as v (m/s).
Fig. 3. Error in distance due to the clock drift.
4.1. Effect of motion
TDoA assumes that the difference in signal arrivals cor-respond to difference in range estimates with beacons at aparticular time instance. As a result, when the submersibleis moving, the error in the 2D position estimate is deter-mined by the displacement of the submersible in the hor-izontal plane during the signaling interval. This is becausethe depth of the submersible is known from pressure sen-sors and can be compensated for. Therefore, the error inpositioning is given by v � dt, where v is the speed of thesubmersible in 2D. We evaluated this error as a functionof the signaling interval dt for nominal submersible speedsof 0.4 m/s to 2 m/s.
As shown in Fig. 2, the error due to the submersible’smotion becomes significant when the signaling interval,dt, increases to more than a few seconds. Further, this errorcan be as large as 120m when the signaling interval is oneminute long. Therefore, the effect of the submersibles
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
motion can significantly degrade the performance of TDoAwhen transmissions are non-concurrent.
4.2. Effect of clock drift
Next, we consider the effect of a changing clock offset.The change in the clock offset during the signaling intervalessentially translates to an error in the measured time-dif-ference between the signal arrivals from a pair of beacons.Since the clock offset varies linearly with the drift, thechange in the clock offset during the signaling interval iscomputed as g � dt. When multiplied by the speed of sound,this translates to an error in (the difference in) range esti-mates with the beacons, given by c � g � dt. This error isshown as a function of the signaling interval in Fig. 3 forclock drifts in the range of 0.02 ppm to 20 ppm. As the fig-ure shows the error due to clock drift is not significantwhen the drift is less than 20 ppm.
Based on the above results we propose that submersibleswhich only have receive capability incorporate low-driftclocks, especially if they are to operate in scenarios wherebeacon transmissions are non-concurrent. Consequently,the clock drift does not have to be estimated over short timeepochs, which makes the estimation problem more tracta-ble. Low-drift clocks have been incorporated in a numberof practical underwater platforms. For example, Eusticeet al. have reported integrating a temperature clock into
ed joint time synchronization and tracking for mobile underwater0.010

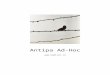
Fig. 4. Factor-graph description for joint synchronization and tracking.
J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 5
the micro-modem, with a skew of only 0.02 ppm [6]. Similarlevels of accuracy have also been achieved through a noveland inexpensive approach using two crystals [7].
While the effect of clock drift is negligible when an accu-rate clock is used, the effect of the motion can still be signif-icant. Although the error introduced due to motion cannotbe eliminated entirely, we propose to compensate formotion as much as possible by adding of an IMU and furthertracking the submersibles position during the window, T.As such, it is not atypical for submersibles to have an on-board IMU for tracking their location underwater. However,TDoA does not use information from an IMU, per se.
Based on the above reasoning, we consider the use ofboth an on-board IMU as well as a low-drift clock crystalto jointly track and synchronize a submersible. Next, wepresent our proposed Time of Arrival based Tracked Syn-chronization (ToA-TS) technique. Our goal is to extendGPS like localization for systems where beacon transmis-sions do not occur concurrently and submersibles are notcapable of two-way communication. Therefore, we proposeto estimate the Maximum Likelihood (ML) positions of thesubmersible and a single unknown clock offset during theinterval T. This process is periodically repeated to trackand synchronize the submersible over longer durations. Inthe next section we describe our proposed solution.
5. Solution strategy
Our goal is to estimate the Maximum Likelihood (ML)position and clock offset of the submersible over a timeepoch T given the measured time of flight of acoustic mes-sages transmitted by the beacons and IMU measurementsobtained during that time. We assume that the depth isknown from pressure sensors, therefore, we estimate theposition of the submersible in two dimensions.
The timestamps obtained from acoustic messages imposea non-linear and non-Gaussian constraint on the pdf of theposition and clock offset of the submersible at each point intime, as given in Eq. (1). To incorporate such type of con-straints, we appropriately define the tracking problem inthe Bayesian estimation framework of factor-graphs. Factorgraphs offer a way to represent any global function (in thiscase the joint probability distribution of the unknown posi-tion and clock offset) in terms of simpler local functions thatdepend only on a subset of variables. The sum-product algo-rithm can operate on this graph and exploit these simplerelations to estimate the pdf of individual states in the graphvia iterative message passing [8,9]. We have previously dis-cussed this framework in the context of underwater tracking[10]. However, in our previous work we used this frameworkto track submersibles from inter-vehicle measurements ofdistance. Distance estimation and time synchronizationwere performed independently of tracking. Here we usethe framework of factor-graphs to jointly track and time-synchronize a submersible. Next, we present the factor-graph description of our tracking problem.
5.1. Factor-graph description
As a first step towards solving our joint tracking andsynchronization problem, we have come up with the
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
appropriate factor-graph description given in Fig. 4. Thegraph gives a description of the interdependencies betweenthe unknown positions and clock offset of the submersibleover time. Mathematically, this graph describes the jointdistribution of the unknowns given all measurements oftime-of-flight (prior to synchronization) and measure-ments of the submersible’s motion in the interval T. Eachstate PðtÞ in the factor graph (denoted by a circle) repre-sents the unknown position of a submersible at a timeinstance t. The unknown clock offset is denoted as DðtÞand represented by a hexagon. The square blocks, knownas function-nodes, link the state-variables. The function-nodes not only indicate which state-variables are relatedbut also how they relate. More specifically, a function nodef that has links to state-variables X and Y assigns a weightf ðX ¼ x;Y ¼ yjmÞ to any outcome X ¼ x;Y ¼ y given a mea-surement m. Therefore, function-nodes define constraints(or interdependencies) between state-variables. Two typesof constraints are captured by the graph. Function-nodes oftype f 1 define constraints on the position and clock offset ateach point in time as imposed by the measured time-of-flight of acoustic messages. Function-nodes of type f 2
describe how the unknown positions vary over consecutivetime steps given measurements of the submersible’s veloc-ity. The clock offset remains constant over the time epoch T,therefore, it is represented by a single unknown state.
The key advantage of the factor-graph framework isthat function-nodes can take any generic form that bestdescribes the likelihood of measurements given state-vari-ables. This makes it possible to easily describe non-linearrelations, such as the one given by Eq. (1). For our specificproblem, the formal definitions of the function-nodes aregiven in Eqs. (4) and (5). These are derived from Eqs. (1)and (3), respectively.
f 1ðXðtÞÞ ¼ pð½PðtÞ;DðtÞ�Þ ¼ pðPðtÞ;DðtÞjmiðtÞ; PiðtÞÞ
¼ 1ffiffiffiffiffiffiffi2pp
rR
e�ðkPiðtÞ�PðtÞk=c�ðmiðtÞþDðtÞÞÞ2=2r2R ð4Þ
f 2ðPðtkÞ; Pðtkþ1ÞÞ ¼ pðPðtkÞ; Pðtkþ1Þj�vkÞ
¼ 1ffiffiffiffiffiffiffi2pp
rvekPðtkþ1Þ�ðPðtkÞþ�vk �ðtkþ1�tkÞÞk2=2r2
v ð5Þ
As depicted in Fig. 4, the resultant factor-graph repre-sentation of this problem is cyclic. This poses a key chal-lenge for the tracking algorithm that runs on the graph toestimate the unknown states since the tracking algorithm,which we will later describe in Section 5.2, is not guaran-teed to converge for cyclic graphs.
To address this problem we use a result by Kschischanget al. to transform a cyclic factor-graph to an equivalentgraph that is free of cycles (Section VI. B[8]). Specifically
ed joint time synchronization and tracking for mobile underwater0.010

Fig. 5. Acyclic factor graph obtained the stretching transformation.
6 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
we apply a stretching transformation to the factor-graph inFig. 4, to obtain an equivalent acyclic graph that is shownin Fig. 5. This transformation entails augmenting each ofthe unknown position states PðtÞ, described in 2D, toinclude the unknown clock offset, DðtÞ. In effect, DðtÞ isstretched along the path to each unknown position state.The augmented state is denoted as XðtÞ ¼ ½PðtÞ;DðtÞ�,whose state-space is naturally defined over 3D. As a finalstep, we have to modify the function-nodes f 2 (in the ori-ginal graph) to a new function-node, g2 which takes asinput the augmented state XðtÞ. The function node g2 isf 2 predicated by the fact that the value of the clock offsetdoes not change over time. g2 is defined in Eq. (6).
g2ðXðtkÞ;Xðtkþ1ÞÞ ¼ pðXðtkÞ; Xðtkþ1Þj�vkÞ¼ f 2ðPðtkÞ; Pðtkþ1ÞÞ � IðDðtkÞ;Dðtkþ1ÞÞ ð6Þ
where I is a predicate function given by:
Iðu;vÞ ¼1; if u ¼ v0; if u – v
�
The sum-product algorithm runs on the above-described factor-graph to estimate the pdf of the unknownstate-variables. The algorithm in its generic form is dis-cussed in previous tutorials [8,9]. Here we present a briefoverview and examine its operation in the context of ourjoint tracking and synchronization problem.
Fig. 6. Operation of the sum-produ
X (m)
Z (s)
Fig. 7. (a) 3D pdf of position and clock offset given the measured time of flight ofclock offset.
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
5.2. Tracking algorithm
Once the factor graph is defined, an iterative messagepassing algorithm, namely, the sum-product algorithm runson it to solve the estimation problem. In each iteration of thealgorithm, nodes in the factor-graph compose messagesthat are sent over the links of the graph. Messages are com-posed based on those received in a previous iteration.
There are two main types of messages exchanged duringa single iteration of the algorithm. Messages from a func-tion node f to a state-variable x, denoted as lx�f ð:Þ and mes-sages from a state-variable x to a function node f, denotedas lf�xð:Þ. These are computed as per Eqs. (7) and (8) [8].Messages that are sent out by a state-variable to its neigh-bor function-nodes are the most current estimate of thestate-variables probability distribution. A message sentout by a function node to its neighbor state-variable is anestimate of the state-variables probability distribution,given the probability distribution of all other state-vari-ables that are neighbors of the function node. A functionnode generates its message to a neighbor state-variableby performing a marginalization of its local likelihood func-tion (as described by Eq. (7)). A state-variable estimates itsdistribution (or outgoing messages) by intersecting theindividual estimates of its distribution provided by its func-tion-node neighbors, (as given by Eq. (7)). These messages,computed locally at each node, set up the machinery tocarry information across the graph.
lf�xðxÞ ¼X�ðxÞð f ðXÞ
Yy2nð f Þnfxg
ly�f ðyÞÞ ð7Þ
lx�f ðxÞ ¼Y
h2nðxÞnf fglh�xðxÞ ð8Þ
where the summary operation is defined in [8].To better understand how information obtained from
acoustic messages and IMU measurements are combined
ct algorithm on a sub-graph.
X (m)
(a)(b)
an acoustic message. (b) Cross-section of the pdf in 2D for a fixed value of
ed joint time synchronization and tracking for mobile underwater0.010

Z (s)
X (m)
Fig. 8. Reduction in the uncertainty of position and clock offset byintersecting two independently computed cones in 3D.
J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 7
to solve our specific estimation problem, we present theoperation of the sum-product algorithm on the factor-graph described in the previous section. We specificallyconsider messages passed over three iterations of the algo-rithm on the sub-graph shown in Fig. 6.
Iteration 1: In the first iteration, information flows fromfunction-nodes of type f 1 to the unknown state-variables,Xðt1Þ and Xðt2Þ as shown in Fig. 6(1). Each of these func-tion-nodes is only linked to one state-variable. From Eq.(7), the message sent from f 1 to its neighbor state-variable,XðtÞ is f 1ðXðtÞÞ, evaluated over the 3D state-space of XðtÞ.This message is an estimate of the pdf of XðtÞ. Its state-space is visualized in Fig. 7(a). The x–y axes represent thepossible positions of the submersible at time t, while thez-axis represents the possible values of the clock offset.The cone shown in the figure highlights the possibleposition and clock offset values considered jointly, whichfollows directly from Eq. (1). Note that the depth of thesubmersible is known from pressure sensors, therefore,we are effectively estimating its position in 2D. As perEq. (1), for a given depth of the submersible and a particu-lar value of the clock offset, the position of the submersibleis a ring in 2D centered at the position of the beacon. Theminimum possible radius is zero since the true time-of-flight (or distance) is always positive. As the value ofthe possible clock offset increases, so does the radius ofthe ring. Therefore, we obtain a cone in 3D for the state-space of XðtÞ as shown in Fig. 7.
Following Eq. (4), the message passed by f 1 is a set ofweights computed for each point on the cone. This 3D mes-sage can be visualized as a number of pdfs in 2D stacked ontop of each other. Each 2D pdf is defined for a particularvalue of the clock offset by intersecting a plane with thecone as shown in Fig. 7(a), and computing a set of weightsover the ring thus obtained. The pdf computed over the ringby f 1 is visualized in Fig. 7(a), and computed as per Eq. (4)for a fixed value of the clock offset. Therefore, each mea-surement of time-of-flight obtained from an acoustic mes-sage results in the above-described weighted-cone as thepdf of the unknown position and clock offset at that time.
Iteration 2: In this iteration, the estimates of the pdf ofXðt1Þ and Xðt2Þ, from the previous iteration are communi-cated to the function-node g2.
Iteration 3: Function-node g2 combines these messagesto estimate the pdf of each of its neighbor state-variables.The message passed from g2 to the state-variable Xðt2Þ isan estimate of the pdf of Xðt2Þ given estimates of the pdfsof Xðt1Þ. This step is essentially a 2D translation andsmoothing of the pdf of Xðt1Þ, as dictated by the velocitymeasurements and the statistics of error in these measure-ments, to obtain an estimate of the pdf of Xðt2Þ. The pdf ofXðt1Þ is a weighted-cone (from iteration 2). Therefore, themessage sent from g2 to Xðt2Þ is also a weighted-cone. Asimilar transformation is applied by g2 to compute an esti-mate of the pdf of Xðt1Þ.
At the end of the third iteration, each of the state-vari-ables Xðt1Þ and Xðt2Þ has two independent estimates of itspdf on its incoming links, which can be visualized as twodifferent weighted-cones. As a final step, each state-vari-able intersects these pdfs to obtain a refined estimate ofits pdf in 3D. This operation is visualized in Fig. 8. The
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
crucial point is that at the end of this step the possible val-ues of the clock offset and position are constrained only tothe regions where the cones intersect, consequently reduc-ing the uncertainty in these estimates.
6. Improvements to the algorithm run-time
One of the key factors that determines the run time ofthe proposed factor-graph solution is specifying the 3Dspace over which the pdf of the unknown position andclock offset is estimated. This can be best visualized byconsidering the pdf of the unknown position and clock off-set in 3D, given a single measurement of time-of-flight asdepicted in Fig. 7(a). As the figure shows the pdf isspecified by a cone that extends indefinitely in the positiveZ-dimension. Estimating the pdf over this space poses asignificant computational challenge.
To improve the run-time of the algorithm we would liketo provide our factor graph algorithm with an initial estimateof the clock offset and the position of the vehicle for each ofthe states in the graph. We derive these initial estimatesanalytically by computing the least squares solution to ouroriginal problem (described in Section 3). In this section wepresent the derivation of the least squares solution.
To obtain the least squares estimate we begin withEq. (1), in Section 4. For a signal transmitted by the beaconat time tk, this equation relates the unknown position andclock offset of the submersible to the position of the beaconand the measured time of flight (prior to time synchroniza-tion). Squaring both sides in Eq. (1) results in Eq. (9).
PiðtkÞ � PðtkÞk k2=c2 ¼ ðmiðtkÞ þ DðtkÞÞ2 þ e0k ð9Þ
A similar equation is obtained due to a transmission at alater time tkþl
PjðtkþlÞ � PðtkþlÞ�� ��2
=c2 ¼ ðmiðtkþlÞ þ DðtkþlÞÞ2 þ e0kþl ð10Þ
Subtracting Eqs. (10) from (9), we obtain
PðtkþlÞ � PðtkÞ þ PiðtkÞ � PjðtkþlÞ� �T PðtkþlÞ þ PðtkÞ � PiðtkÞ½� PjðtkþlÞ
�¼ c2ðmjðtkþlÞ �miðtkÞÞ � ðmjðtkþlÞ þmiðtkÞ
þ 2 � DðtkÞÞ þ c2 � e0kþl � e0k� �
ð11Þ
The displacement of the submersible during the period(tk; tkþl) is computed from velocity measurements obtainedduring that time, as per Eq. (3). Substituting Eq. (3) in theabove equation we obtain Eq. (12).
ed joint time synchronization and tracking for mobile underwater0.010

8 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
2Xkþl
j¼k
~v j � dt þ PiðtkÞ � PjðtkþlÞ" #T
� c2 mjðtkþlÞ �miðtkÞ� �2
435
� PðtkÞTDðtkÞh iT
¼ c2 � mjðtkþlÞ� �2 � miðtkÞð Þ2
�Xkþl
j¼k
~v j � dt þ PiðtkÞ � PjðtkþlÞ" #T
�Xkþl
j¼k
~v j � dt � PiðtkÞ � PjðtkþlÞ" #
þ ~e ð12Þ
Following the approach in Section 5.1 we denote the
augmented state PðtkÞTDðtkÞh iT
by XðtkÞ. Eq. (12) is a linear
equation in the unknown state XðtkÞ and can be writtenmore compactly as:
ATl XðtkÞ ¼ bl þ ~e
where
Al¼Xkþl
j¼k
~v j �dtþPiðtkÞ�PjðtkþlÞ" #T
�c2 mjðtkþlÞ�miðtkÞ� �2
435
T
bl¼ c2 � mjðtkþlÞ� �2� miðtkÞð Þ2
�Xkþl
j¼k
~v j �dtþPiðtkÞ�PjðtkþlÞ" #T
�Xkþl
j¼k
~v j �dt�PiðtkÞ�PjðtkþlÞ" #
For m consecutive transmissions at times tk; tkþ1; tkþ2,tkþm�1, we would obtain m� 1 such equations. The leastsquares estimate for the unknown position and offset attime tk can be obtained as
X̂ tkð Þ ¼ AT A �1
AT b ð13Þ
where A ¼ A1A2 . . . Am�1½ �T and b ¼ b1b2 . . . bm�1½ �T
The least squares estimate of the unknown position andclock-offset at each time tk, computed as discussed aboveis used as an initial estimate to our factor-graph solution.This significantly minimizes the search space of thealgorithm, thereby reducing the run time.
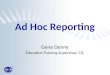
Fig. 9. Experimental deployment of ref
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
7. Experimental results
To validate our approach, we applied our proposed tech-nique to data obtained from sea trials conducted off thecoast of San Diego. The experiments consisted of deployinga set of five surface buoys as shown in Fig. 9. A verticalhydrophone array was allowed to drift from Buoy 1towards the center of the deployment. The trajectory ofthe array is shown in the figure. Both the buoys and thereceiver array were equipped with GPS. The buoys weretime synchronized to GPS throughout the experiment. Theyalso obtained their position information from GPS, whichwas used for localizing the array. The GPS unit on the recei-ver array was only used to establish ground truth positionagainst which the tracking performance was compared.
Each buoy periodically transmitted an LFM chirp in the7–15 kHz range. The buoy transmissions were synchro-nized with GPS and lagged by a second. The hydrophonearray passively recorded the acoustic signals received byit. These received signals were processed post-facto. AMatched Filter approach was used to estimate the first arri-val time of each signal. The location of the vehicle was esti-mated from the signal arrival times using three methods. Inthe first method, the time synchronization was done inde-pendent of the position estimation, as described in our ear-lier work [4]. The results of this method to the experimentaldata was reported in our previous work [4]. In this paper,we applied our proposed scheme to the experimental data.In this (second) method, the localization and position esti-mation were performed jointly using the technique pro-posed in this paper. Lastly, the vehicle’s position wasestimated using Time Difference of Arrival (TDoA). Theseapproaches are discussed and compared in the followingsubsections.
7.1. Independent time synchronization and localization
In this approach, the position of the vehicle was esti-mated from non-concurrent estimates of distance. Distancewas estimated from measurements of time-of-flight of theacoustic transmissions. To estimate time-of-flight from therecorded acoustic data we had to detect the first arrival timeof each of the buoy transmissions according to the reference
erence buoys and mobile vehicle.
ed joint time synchronization and tracking for mobile underwater0.010

Fig. 10. (a) Histogram of error in distance estimates using experimental data. (b) Estimated trajectory, when time synchronization and position estimationwere performed independently.
J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 9
time of the buoys (GPS time). However, the receiver’s notionof time was only available from its local clock. To translatethe signal arrival times that were recorded according to localtime to GPS time, we estimated the drift in the local clock ofthe vehicle. This was done by estimating the clock offsetbetween the receiver and GPS at the beginning and end ofthe experiment using the signal arrival times and the knownposition of the vehicle from GPS (when it was on the surfaceand later at the end of the experiment when it resurfaced).The clock drift was then estimated by doing a linear regres-sion on the timing offsets. The estimated drift was used toconvert the signal arrival times to global (GPS) time. Time-of-flight was computed as the difference between the sendand receive times of the acoustic transmissions. The speedof sound was estimated empirically from CTD profiles thatwere performed during the experiment. Distance was esti-mated as the product of the time-of-flight measurementsand our estimate of the speed of sound. The error in the dis-tance estimates was computed from the ground truth posi-tions of the array and that of the buoys as obtained fromGPS. The histogram of the error in the distance estimates isshown in Fig. 10(a). These errors are due to the error in ourdetection of the first arrival of the acoustic signals, the errorin the estimate of the clock drift and the error in the estimateof the speed of sound. The estimated position of the vehicleusing the above method is shown in Fig. 10(b).
While such an approach provides accurate position esti-mates it has two main drawbacks. First, it is not amenableto a real-time solution because the clock drift can only beestimated after the vehicle resurfaces (at the end of themission). The second drawback is that the vehicle requiresto have an onboard GPS to perform time synchronization.Both these problems are addressed by our joint time syn-chronization and tracking technique that relies primarilyon the received acoustic signals and does not require thevehicle to have a GPS. In the next section we present theresults of our proposed method when applied to the exper-imental data.
7.2. Joint time synchronization and localization
We estimated the position and clock offset of the vehi-cle jointly from non-concurrent estimates of time-of-flight
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
using (a) the TDoA method and (b) the proposed ToA-TSmethod. Time-of-flight was estimated as the differencebetween the receive time of an acoustic signal (accordingto the local clock of the receiver) and the transmit timeof the signal according to GPS (global) time. The unknownposition and clock offset were estimated from independentsets of five consecutive time-of-flight measurements.Velocity measurements were used to estimate the positionat all times where distance measurements were not avail-able. Using this approach the position of the hydrophonearray was estimated every 20s. In the case of ToA-TS, theleast squares solution proposed in Section 6 was used toobtain an initial estimate which was provided as input tothe factor-graph solution. This significantly reduced the(3D) space over which the pdf of the unknown positionand clock offset had to be estimated by the factor-graphsolution.
Since IMU measurements were not available in theexperimental data set, velocity measurements were gener-ated from the GPS log to emulate the presence of an IMU.However, prior to giving the velocity data to our algorithmwe added randomly generated errors from a truncatedGaussian distribution with a maximum velocity error of0:2m=s (the effect of varying the velocity error is later eval-uated in Section 7.3.2). In the next section we present thecomparative performance of the schemes discussed so far.
7.3. Comparative performance of tracking and timesynchronization techniques
We evaluated the performance of ToA-TS, TDoA and dis-tance based tracking using all the acoustic signals receivedby the hydrophone array in our experiment. This corre-sponded to the scenario where each beacon periodicallytransmitted a signal every 6s with one second lag betweenconsecutive transmissions. The cdf of the RMS error in posi-tion estimates for the three schemes is shown in Fig. 11. Theresults show that the performance of ToA-TS and TDoA aresimilar and both these schemes outperform distance-basedtracking. This is because in the distance-based solution,imprecise knowledge of the clock-offset introduces an errorin the estimated distances, while ToA-TS and TDoA do notsuffer from this problem because they jointly estimate the
ed joint time synchronization and tracking for mobile underwater0.010

0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
RMS Error of estimated position (m)
ToA−TSDistance based trackingTDoA Scheme
Fig. 11. CDF of RMS Error in position estimates using experimental datawith all measurements between signal transmissions from beacons everyone second.
10 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
clock offset and the position of the array. Since the signalsare transmitted nearly concurrently, the performance ofTDoA and ToA-TS are very similar. The motion of the arrayduring the interval that it receives measurements from allthe five beacons accounts for the small difference in perfor-mance of ToA-TS and TDoA.
7.3.1. Reducing the beacon signaling frequencyIn our original experiments each beacon transmits every
6 s with a lag of a second between consecutive transmis-sions. We consider the scenario where the rate at whichbeacons transmit is reduced to once in 80 s. We then con-sider two signaling strategies by the beacons. In the firstcase transmissions from multiple beacons arrive withinthe shortest possible window (of 6 s), while in the secondcase they are spread out in the 80 s interval i.e. consecutivetransmissions arrive at a lag of 16 s. In both cases the posi-tion of the hydrophone array is estimated every 20 s. Forthese two scenarios we compared the performance of ourdistance-based factor graph solution (proposed in earlierwork), TDoA and the proposed ToA-TS scheme.
Fig. 12(a) shows the cdf of the RMS error in the positionestimates of the hydrophone array for the different locali-zation techniques when the signal arrivals were nearly
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
RMS Error of estimated position (m)
ToA−TS
Distance based tracking
TDoA
(a)
0
0.2
0.4
0.6
0.8
1
Fig. 12. CDF of RMS Error in position estimates using experimental dat
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
concurrent, with a lag of only a second between consecu-tive transmissions. The results show that ToA-TS outper-forms both TDoA and our originally proposed distancebased solution. We observe that there is a consistent errorgap of approximately 5 m between the RMS error of theposition estimates obtained using ToA-TS and TDoA. Thisdifference is attributed to the fact that TDoA assumes thatthe signals are transmitted concurrently in time. The max-imum speed of the hydrophone array (as obtained from theGPS log) was approximately 0.5 m/s, which corresponds toa displacement of 5 m between signal arrivals, when thetransmissions are one sec apart. This explains the differ-ence in performance between TDoA and ToA-TS. Whileour original distance based solution does not assume con-current signal arrivals, the error in the estimated clock driftintroduces additional error in distance estimates. This isbecause the estimated clock drift is used to translate thetime of arrival of all signals obtained during the experi-ment to global time. If the error in the estimated clock driftis edrift , a timing error of edrift � T is added to the time of flightestimate of a signal that was transmitted TðsÞ into theexperiment. On the other hand, ToA-TS does not sufferfrom this problem because the signal arrivals do not haveto be translated to global time.
Fig. 12(b) shows the performance of the three schemeswhen the consecutive signal transmissions are lagged by16 s. For this scenario we observe a significant improvementin the performance of ToA-TS and a significant deteriorationin the performance of TDoA. As before, the deterioration inthe performance of TDoA is because of the unaccounted dis-placement of the hydrophone array between signal arrivalswhich increases when the interval between signal transmis-sions is increased from one second to 16 s. Since ToA-TS usesvelocity estimates to account for the displacement, it canactually benefit from a lagged signaling scheme. This is inline with our previous findings [4] where a lagged schemedepicted in Fig. 1(b) outperformed the scheme where signaltransmissions were nearly concurrent in time (as depictedby Fig. 1(a)). However, in our earlier work these two signal-ing schemes were compared when the tracking was donebased on distance measurements and time synchronizationwas performed independent of the tracking. The resultsshown in Fig. 12(b) go on to show that a lagged signalingapproach is also advantageous when the position and clockoffset are jointly estimated as in ToA-TS.
0 5 10 15 20 25 30 35 40
RMS Error of estimated position (m)
ToA−TS
Distance based tracking
TDoA Scheme
(b)
a with (a) 1 s lag and (b) 16 s lag between beacon transmissions.
ed joint time synchronization and tracking for mobile underwater0.010

0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
RMS Error of estimated position (m)
velocity error: 0.1m/s
velocity error: 0.2m/s
velocity error: 0.5m/s
(a)
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
RMS Error of estimated position (m)
velocity error: 0.1m/s
velocity error: 0.2m/s
velocity error: 0.5m/s
(b)
Fig. 13. CDF of RMS Error in position estimates (a) 1 s lag and (b) 16 s lag in beacon transmissions when maximum velocity error is varied.
−16 −14 −12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
Error (ms)
(a)
−16 −14 −12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
Error (ms)
(b)
−16 −14 −12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
Error (ms)
(c)
Fig. 14. Histogram of error in clock offset estimates with a second lag between transmissions, max velocity error is (a) 0.1 m/s, (b) 0.2 m/s and (c) 0.5 m/s.
J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 11
7.3.2. Effect of error in velocity measurementsWe evaluated the performance of ToA-TS when the
error in velocity estimates was varied between 0.1 m/sand 0.5 m/s. Since the maximum speed of the hydrophoneis 0.5 m/s, we only consider velocity errors within thatrange.
Fig. 13a shows the RMS error in the position estimatesobtained using ToA-TS, for three different choices of veloc-ity error: 0.1 m/s, 0.2 m/s and 0.5 m/s and the lag betweensignal transmissions was one second. The histogram of theerror in the estimated clock offsets for the same scenario isshown in Fig. 14(a)–(c). As expected, we observe a degra-dation in the accuracy of the position and clock offset esti-mates when the error in velocity measurements inincreased. However, this degradation is not significant.
Fig. 13b shows the RMS error in the position estimatesobtained using ToA-TS, when the error in velocity mea-surements was varied as before and the lag between signaltransmissions was 16 s. The histogram of the error in theestimated clock offsets for the same scenario is shown inFig. 15(a)–(c). These results show a similar trend as thecase where the interval between signal transmissionswas a second.
In addition to the results provided in this section, wehave provided extensive simulation results in the confer-ence version of the paper [2]. In this section we validatedof our proposed technique with experimental data to fur-ther support our evaluations in simulation. The key newfindings highlighted by our experimental evaluation ofToA-TS is that there is significant benefit to using ToA-TS
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
when the rate at which beacons transmit is constraineddue to energy considerations. Further, the best signalingscheme in such a scenario would be to evenly lag consec-utive transmissions over the signaling period of eachbeacon.
8. Related work
TDoA is one of the most widely used techniques tolocalize a submersible from one-way acoustic transmis-sions. Under ideal conditions, where transmissions frombeacons occur concurrently, this technique serves as away to both localize and time-synchronize the submersiblefrom one-way acoustic transmissions. The TDoA approachhas been extended to localizing submersibles in 3D wherethe depth of the vehicle is also unknown [11]. It has alsobeen extended for the case where the beacons are nottime-synchronized with each other [12]. However, theseapproaches do not consider the effect of vehicle motionfor non-concurrent beacon transmissions. The authors in[13] propose tracking vehicles from one way acoustic mes-sages using a motion model rather than IMU measure-ments. A cooperative approach to tracking and timesynchronization is proposed in [14].
Tracking and time-synchronization for mobile networkshave been typically treated as separate problems [15,16]. Anumber of tracking techniques estimate a vehicles positionfrom non-concurrent distance estimates [10,17]. However,distance estimation requires round trip message exchange
ed joint time synchronization and tracking for mobile underwater0.010

−12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
25
Error (ms)
(a)
−12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
25
Error (ms)
(b)
−12 −10 −8 −6 −4 −2 0 2 4 60
5
10
15
20
25
Error (ms)
(c)
Fig. 15. Histogram of error in clock offset estimates with 16 s lag between transmissions, max velocity error is (a) 0.1 m/s, (b) 0.2 m/s and (c) 0.5 m/s.
12 J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx
or prior time synchronization with the beacons. On theother hand, time-sync protocols that take vehicle motioninto account, such as MU-Sync [18], D-Sync [19] andMobi-Sync [20] require bi-directional acoustic signalingwith beacons. Therefore, the signaling overhead associatedwith performing time-sync and tracking independently issubstantial. In order to reduce the overall acoustic commu-nication overhead compared to previous time synchroniza-tion protocols, JSL proposes to address the two problemsjointly using a shared acoustic signaling scheme [21]. Akey difference between JSL and our proposed method isthat the former still uses a number of bi-directional mes-sage exchanges between the submersible and beaconswhile our proposed ToA-TS method is designed to workwith only one-way beacon transmissions. The keymotivation in the design of JSL is accounting for a depthdependent sound speed profile to correct estimates ofpropagation delay that are initially obtained from astraight line propagation model.
9. Conclusion
In this paper we have proposed ToA-TS, an approachthat synchronizes a submersible while tracking it usingonly a few one-way acoustic transmissions. This methodextends GPS-like time synchronization and localizationfor scenarios where beacon transmissions are no longerconcurrent. We show that by using two simple hardwareenhancements, namely an accurate clock-crystal and anon-board IMU, submersibles that can only receive acoustictransmissions can be accurately tracked and synchronized.Further, if submersibles have acoustic communicationcapability, our proposed approach can be applied forvirtually no communication overhead on the part ofsubmersibles.
Acknowledgment
This work is part of the Project ‘‘Networked SensorSwarm of Underwater Drifters’’ supported by the NSFunder Award Number 1035828.
References
[1] K. Vickery, Acoustic positioning systems. a practical overview ofcurrent systems, in: Proceedings of the Workshop on Autonomous
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
Underwater Vehicles (AUV’98), Cambridge, MA, USA 0 (0), 1998, pp.5–17. http://dx.doi.org/10.1109/AUV.1998.744434.
[2] J. Yi, D. Mirza, C. Schurgers, R. Kastner, Joint time synchronizationand tracking for mobile underwater systems, in: WUWNet’13 0 (0),2013, http://dx.doi.org/10.1145/2532378.2532404.
[3] A. Caiti, A. Garulli, F. Livide, D. Prattichizzo, Localization ofautonomous underwater vehicles by floating acoustic buoys: a set-membership approach, IEEE J. Ocean. Eng. 30 (1) (2005) 140–152,http://dx.doi.org/10.1109/JOE.2004.841432.
[4] D. Mirza, P. Roberts, J. Yi, C. Schurgers, R. Kastner, J. Jaffe, Energyefficient signaling strategies for tracking mobile underwatervehicles, Underwater Technol. 0 (0) (2013) 1–8, http://dx.doi.org/10.1109/UT.2013.6519841.
[5] D. Mirza, C. Schurgers, Energy-efficient ranging for post-facto self-localization in mobile underwater networks, IEEE J. Select. AreasCommun. 26 (9) (2008) 1–6, http://dx.doi.org/10.1109/JSAC.2008.081209.
[6] R.M. Eustice, L.L. Whitcomb, H. Singh, M. Grund, Recent advances insynchronous-clock one-way-travel-time acoustic navigation, in:Oceans’06 0 (0), 2006, pp. 1–6. http://dx.doi.org/10.1109/OCEANS.2006.306931.
[7] T. Schmid, J. Friedman, Z. Charbiwala, Y.H. Cho, M. Srivastava, Xcxo:an ultra-low cost ultra-high accuracy clock system for wirelesssensor networks in harsh remote outdoor environments, in: ISSCC/DAC08 0 (0), 2008.
[8] F. Kschischang, B. Frey, H. Loeliger, Factor graphs and the sum-product algorithm, IEEE Trans. Inform. Theory 47 (2) (2001) 498–519, http://dx.doi.org/10.1109/18.910572.
[9] H. Loeliger, An introduction to factor graphs, Signal Process. Mag. 21(1) (2004) 28–41, http://dx.doi.org/10.1109/MSP.2004.1267047.
[10] D. Mirza, C. Schurgers, R. Kastner, Real-time collaborative trackingfor underwater networked systems, in: WUWNet’12 0 (0), 2012.http://dx.doi.org/10.1145/2398936.2398940.
[11] C. Tian, W. Liu, J. Jin, Y. Wang, in: Localization and synchronizationfor 3d underwater acoustic sensor networks, Springer-Verlag, Berlin,Heidelberg, 2007, pp. 622–631. http://dx.doi.org/10.1007/978-3-540-73549-6_61.
[12] X. Cheng, H. Shu, Q. Liang, D.C. Du, Silent positioning in underwateracoustic sensor networks, IEEE Trans. Vehicular Technol. 57 (3)(2008) 1756–1766, http://dx.doi.org/10.1109/TVT.2007.912142.
[13] P. Carroll, S. Zhou, H. Zhou, X. Xu, J. Cui, P. Willett, Underwaterlocalization and tracking of physical systems, J. Electr. Comput. Eng.,Special Issue on Underwater Communications and Networks 0 (0).doi:http://dx.doi.org/10.1155/2012/683919.
[14] W. van Kleunen, N. Meratnia, P.J.M. Havinga, als-coop-loc:Cooperative combined localization and time-synchronization inunderwater acoustic networks, in: CyPhy 2014 0 (0), 2014, pp. 23–26. doi:110.1145/2593458.2593462.
[15] H.P. Tan, R. Diamant, W.K.G. Seah, A survey of techniques andchallenges in underwater localization, J. Ocean Eng. 38 (14–15)(2011) 1663–1676, http://dx.doi.org/10.1016/j.oceaneng.2011.07.017.
[16] F. Sivrikaya, B. Yener, Time synchronization in sensor networks: asurvey, IEEE Netw. 18 (4) (2004) 0, http://dx.doi.org/10.1109/MNET.2004.1316761.
[17] D. Fox, W. Burgard, H. Kruppa, S. Thrun, A probabilistic approach tocollaborative multi-robot localization, Autonom. Robots 8 (3) (2000)325–344, http://dx.doi.org/10.1023/A:1008937911390.
[18] N. Chirdchoo, W.-S. Soh, K.C. Chua, Mu-sync: a time synchronizationprotocol for underwater mobile network, WUWNet’08 0 (0), 2008,pp. 35–42. http://dx.doi.org/10.1145/1410107.1410115.
ed joint time synchronization and tracking for mobile underwater0.010

J. Yi et al. / Ad Hoc Networks xxx (2014) xxx–xxx 13
[19] F. Lu, D. Mirza, C. Schurgers, D-sync: doppler-based timesynchronization for mobile underwater sensor networks, in:WUWNet’10 0 (0). http://dx.doi.org/10.1145/1868812.1868815.
[20] J. Liu, Z. Zhou, Z. Peng, J.-H. Cui, Mobi-sync: efficient timesynchronization for mobile underwater sensor networks, in:Proceedings of IEEE Globecom, December 0 (0), 2010, pp. 1–5.http://dx.doi.org/10.1109/GLOCOM.2010.5683527.
[21] J. Liu, Z. Wang, M. Zuba, Z. Peng, J.H. Cui, S. Zhou, Sl: joint timesynchronization and localization design with stratificationcompensation in mobile underwater sensor networks, in:SECON’12 0 (0), 2012, pp. 317–325. http://dx.doi.org/10.1109/SECON.2012.6275793.
Jinwang Yi received a Ph.D. degree in com-munication engineering from Xiamen Uni-versity, Xiamen, China in 2014 and a bachelordegree (B.S.) in biomedical engineering fromXidian University, Xian, China in 2007. He wasa visiting Ph.D. student at the department ofComputer Science and Engineering at Uni-versity of California, San Diego from 2011 to2013. His research interests include sensornetworks, underwater acoustic communica-tions and signal processing.
Diba Mirza is currently a Lecturer in theDepartment of Computer Science and Engi-neering at the University of California, SanDiego. She received a M.S. and Ph.D. in Elec-trical Engineering from UCSD in 2010 and aB.E. in Electrical Engineering from Birla Insti-tute of Technology and Science, Pilani, India in2002. She was a postdoc at the Department ofComputer Science and Engineering at UCSDfrom 2010 to 2013. Her research interestsinclude underwater acoustic navigation andnetworked systems.
Ryan Kastner is currently a professor in theDepartment of Computer Science and Engi-neering at the University of California, SanDiego. He received a Ph.D. in Computer Scienceat UCLA, a masters degree (M.S.) in engineeringand bachelor degrees (B.S.) in both ElectricalEngineering and Computer Engineering, allfrom Northwestern University. He is the co-director of the Wireless Embedded SystemsMaster of Advanced Studies Program. He alsoco-directs the Engineers for Exploration Pro-gram. His current research interests reside in
the realm of embedded system design, in particular, the use of reconfig-urable computing devices for digital signal processing.
Please cite this article in press as: J. Yi et al., ToA-TS: Time of arrival bassystems, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.1
Curt Schurgers received his Ph.D. from UCLAin integrated circuits and systems, and hisengineering degree from the Katholieke Uni-versiteit Leuven (Belgium). He was a lecturerat UCLA in VLSI System Design, and held re-search assistantships at UCLA Networked &Embedded Sysytems Lab and the Interuni-versity Microelectronics Center in Belgium.He joined UCSD in 2003 as a professor in ECE,and currently works at the UCSD QualcommInstitute as a research engineer, project lea-der, area manager and development engineer.
Paul L.D. Roberts received the B.S. degree(with honors) in Computer Engineering andthe M.S. and Ph.D. degrees in electrical engi-neering (applied ocean sciences) from theUniversity of California at San Diego, in 2002,2004, and 2009, respectively. He is interestedin statistical signal processing, machinelearning, computer vision, and oceanography.His current research efforts are in designingunderwater sensors and imaging systemsalong with parameter estimation and classi-fication algorithms in order to extract bio-
logical and physical information from acoustic and optical data. The goalof this research is to develop new tools that improve our ability to surveymarine animals and study physical processes in the ocean. He is currently
working as a Development Engineer at the Scripps Institution of Ocean-ography, University of California at San Diego.Jules S. Jaffe is a Research Oceanographer inthe Marine Physical Lab at the Scripps Insti-tution of Oceanography, U. C. San Diego wherehe has worked for 25 years. He previouslyworked at the Woods Hole OceanographicInstitution as an Assistant and Associate Sci-entist. Jules received his Ph.D. From U. C.Berkeley in Biophysics, a degree in BiomedicalInformation Science from the Georgia Insti-tute of Technology and a B. A. from S.U.N.Y.Bualo in physics. He is a Fellow of theAcoustical Society of America and was a vis-
iting Miller Professor at U. C. Berkeley. In 2012 he was awarded a bestpaper at the International Ocean Optics meeting. Jules is also an AssociateEditor of IEEE Ocean Engineering and started a new journal in 2012 in
which he is Editor-in-Chief; Methods In Oceanography. His work con-cerns the creation of novel instruments for measuring the organisms andthe physics of the ocean.ed joint time synchronization and tracking for mobile underwater0.010









![[ AD Hoc Networks ] by: Farhad Rad 1. Agenda : Definition of an Ad Hoc Networks routing in Ad Hoc Networks IEEE 802.11 security in Ad Hoc Networks Multicasting](https://img.pdfslide.us/doc/110x75/56649d305503460f94a0832b/-ad-hoc-networks-by-farhad-rad-1-agenda-definition-of-an-ad-hoc-networks.jpg)