Embed Size (px)
Citation preview
Ac#ve acous#c sensing – the SONAR equa#on Today we will: 1. Fit all we learned so far (+more) into one equa#on.
2. Provide examples showcasing its use. Next week: sounds in the sea Or Doppler
Some slides from OSU’s Oc679 Acous5cal Oceanography
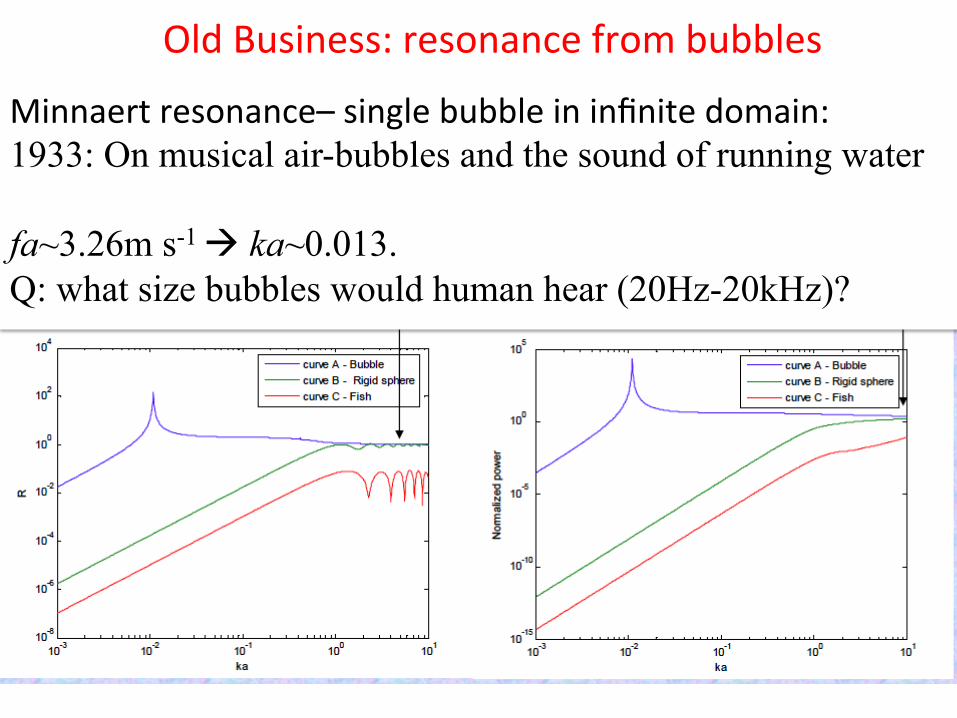
Old Business: resonance from bubbles
Πs =1
Minnaert resonance– single bubble in infinite domain: 1933: On musical air-bubbles and the sound of running water fa~3.26m s-1 à ka~0.013. Q: what size bubbles would human hear (20Hz-20kHz)?
Ac#ve acous#c sensing – the SONAR equa#on SONAR: SOund Naviga#on and Ranging Passive: listening to sounds. Ac#ve: emi*ng pulses and listening for echoes. Also used as name of equipment used to emit and receive sounds. Technology development in response to the Titanic disaster (iceberg detec#on). WW-‐I: passive submarine detec#on.
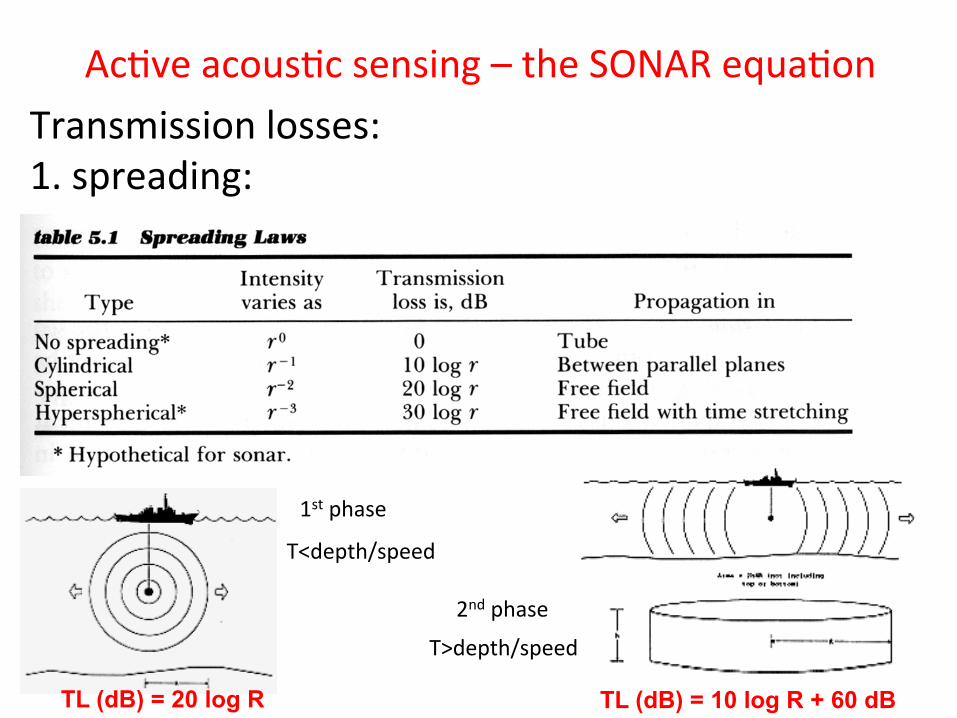
Ac#ve acous#c sensing – the SONAR equa#on Transmission losses: 1. spreading:
1st phase
2nd phase
T<depth/speed
T>depth/speed
TL (dB) = 20 log R TL (dB) = 10 log R + 60 dB
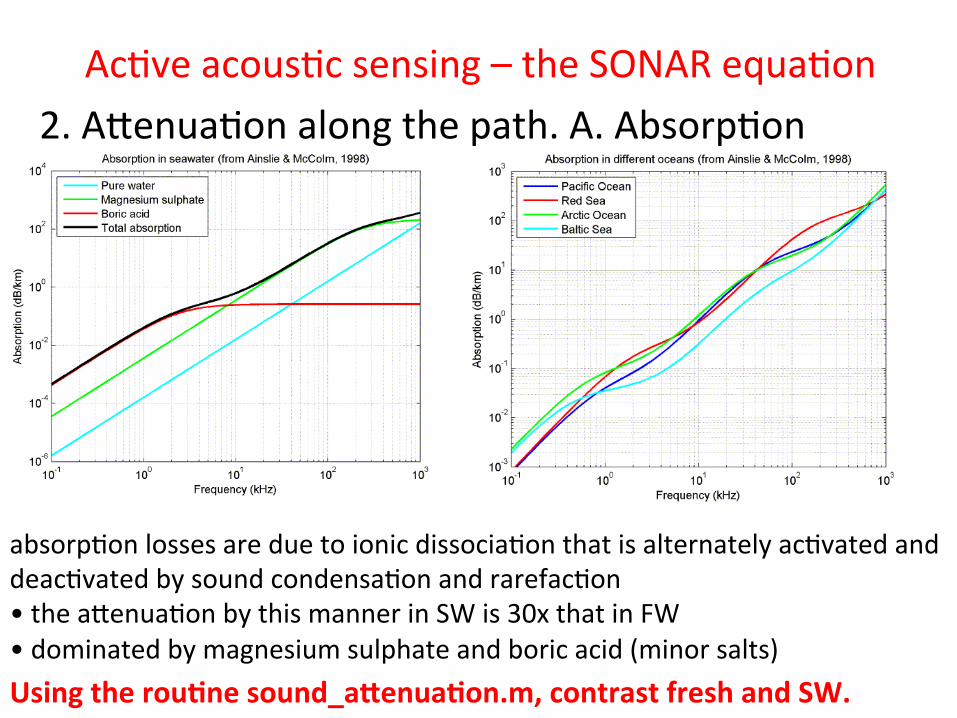
Ac#ve acous#c sensing – the SONAR equa#on 2. AUenua#on along the path. A. Absorp#on
absorp#on losses are due to ionic dissocia#on that is alternately ac#vated and deac#vated by sound condensa#on and rarefac#on • the aUenua#on by this manner in SW is 30x that in FW • dominated by magnesium sulphate and boric acid (minor salts) Using the rou5ne sound_a>enua5on.m, contrast fresh and SW.
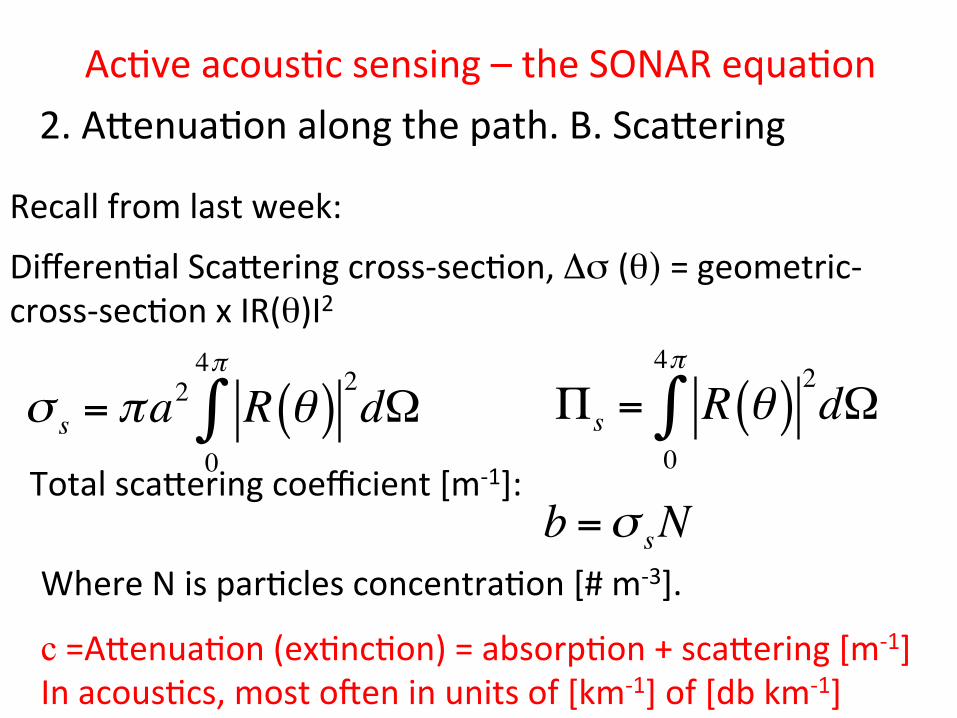
Ac#ve acous#c sensing – the SONAR equa#on 2. AUenua#on along the path. B. ScaUering
Recall from last week:
Differen#al ScaUering cross-‐sec#on, Δσ (θ) = geometric-‐cross-‐sec#on x IR(θ)I2
σ s = πa2 R θ( )
2
0
4π
∫ dΩ Πs = R θ( )2
0
4π
∫ dΩ
b =σ sNTotal scaUering coefficient [m-‐1]:
Where N is par#cles concentra#on [# m-‐3].
c =AUenua#on (ex#nc#on) = absorp#on + scaUering [m-‐1] In acous#cs, most o`en in units of [km-‐1] of [db km-‐1]
Ac#ve acous#c sensing – the SONAR equa#on
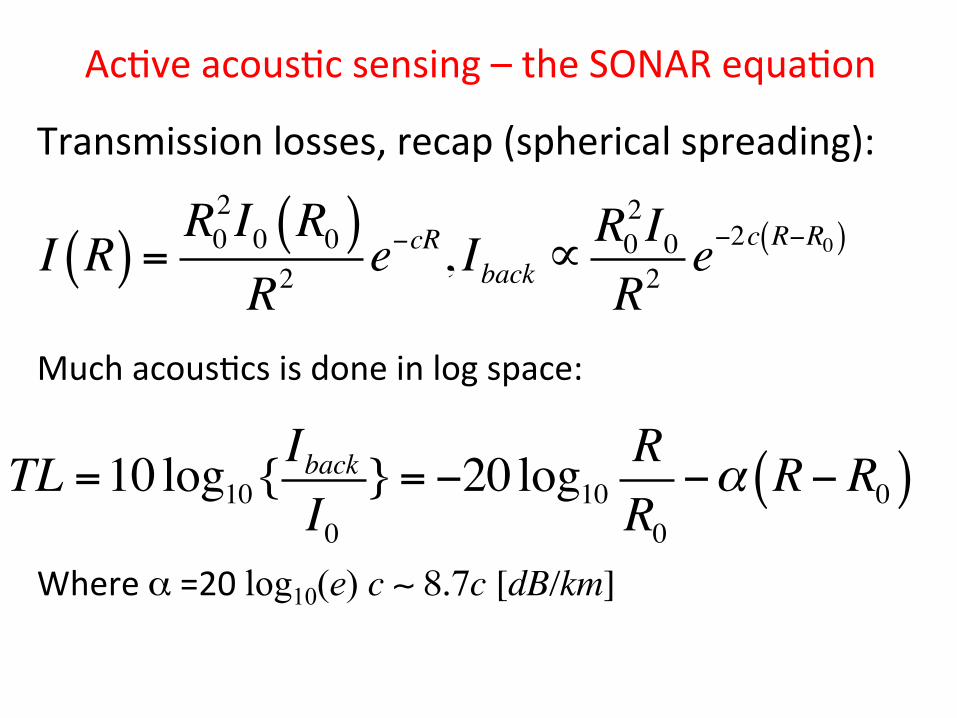
Transmission losses, recap (spherical spreading):
I R( ) =R02I0 R0( )R2
e−cR, Iback ∝R02I0R2
e−2c R−R0( )
TL =10 log10{IbackI0} = −20 log10
RR0−α R− R0( )
Much acous#cs is done in log space:
Where α =20 log10(e) c ∼ 8.7c [dB/km]
Ac#ve acous#c sensing – the SONAR equa#on
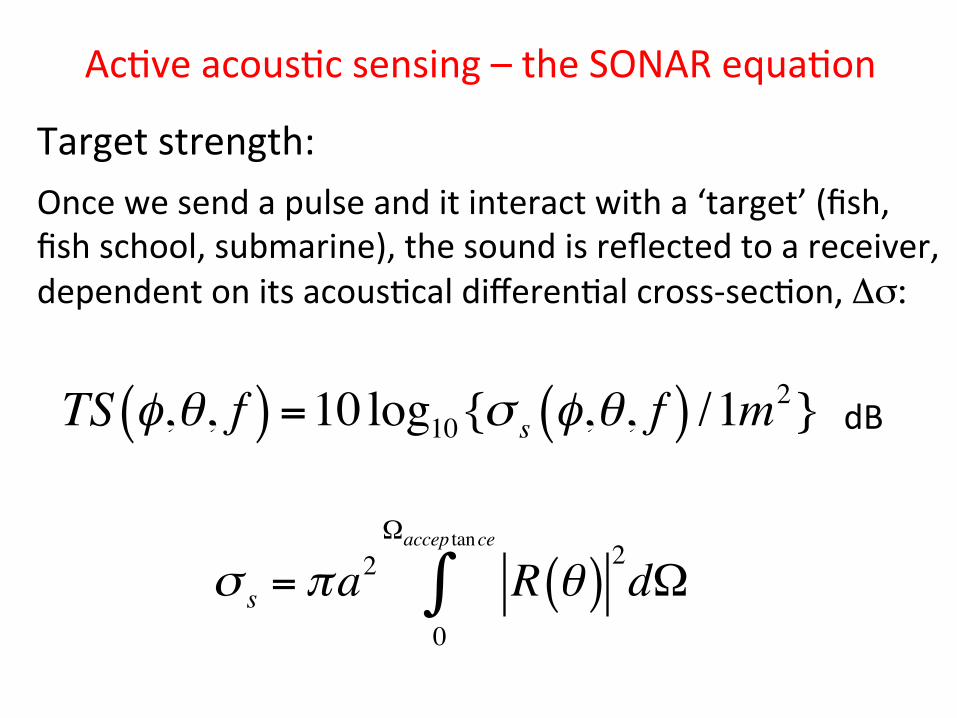
Target strength:
TS φ,θ, f( ) =10 log10{σ s φ,θ, f( ) /1m2}
Once we send a pulse and it interact with a ‘target’ (fish, fish school, submarine), the sound is reflected to a receiver, dependent on its acous#cal differen#al cross-‐sec#on, Δσ:
dB
σ s = πa2 R θ( )
2
0
Ωaccep tance
∫ dΩ
Ac#ve acous#c sensing – the SONAR equa#on
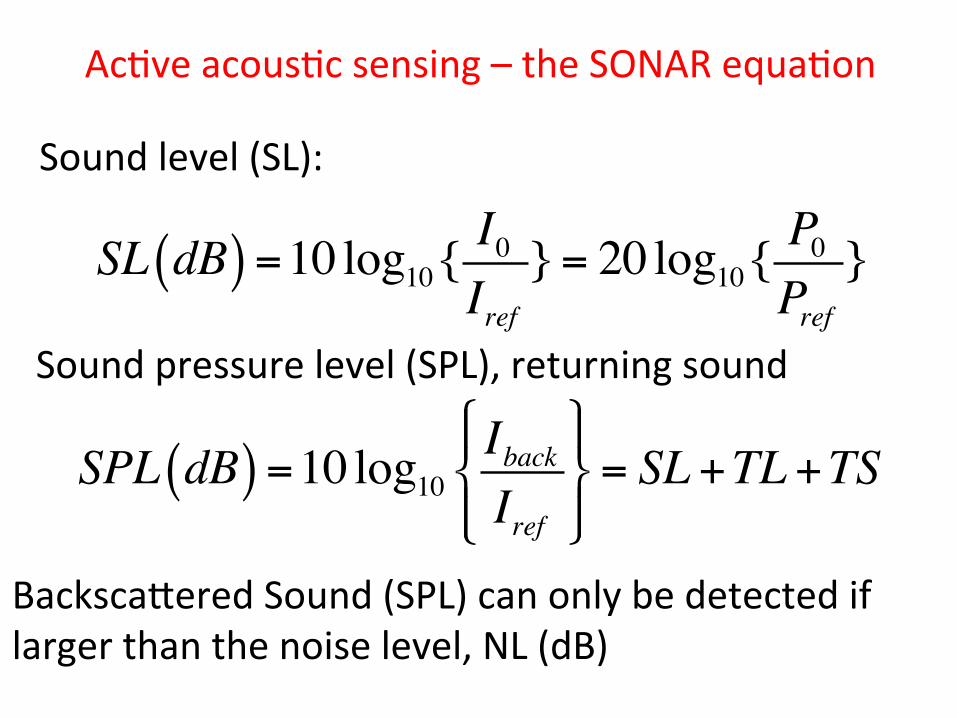
Sound level (SL): SL dB( ) =10 log10{
I0Iref} = 20 log10{
P0Pref}
Sound pressure level (SPL), returning sound
SPL dB( ) =10 log10IbackIref
!"#
$#
%&#
'#= SL +TL +TS
BackscaUered Sound (SPL) can only be detected if larger than the noise level, NL (dB)
Ac#ve acous#c sensing – the SONAR equa#on
Some illustra#ve problems: 1. Close to the source, as we double the distance,
what is the TL for a low frequency sound?
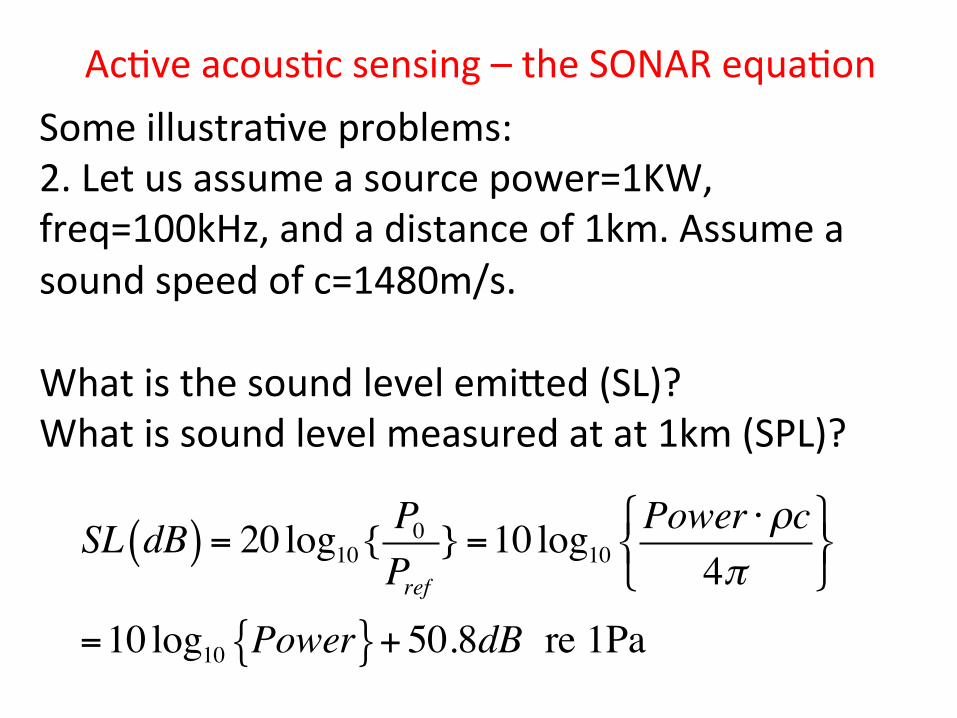
Ac#ve acous#c sensing – the SONAR equa#on Some illustra#ve problems: 2. Let us assume a source power=1KW, freq=100kHz, and a distance of 1km. Assume a sound speed of c=1480m/s. What is the sound level emiUed (SL)? What is sound level measured at at 1km (SPL)?
SL dB( ) = 20 log10{ P0
Pref} =10 log10
Power ⋅ρc4π
"#$
%&'
=10 log10 Power{ }+ 50.8dB re 1Pa
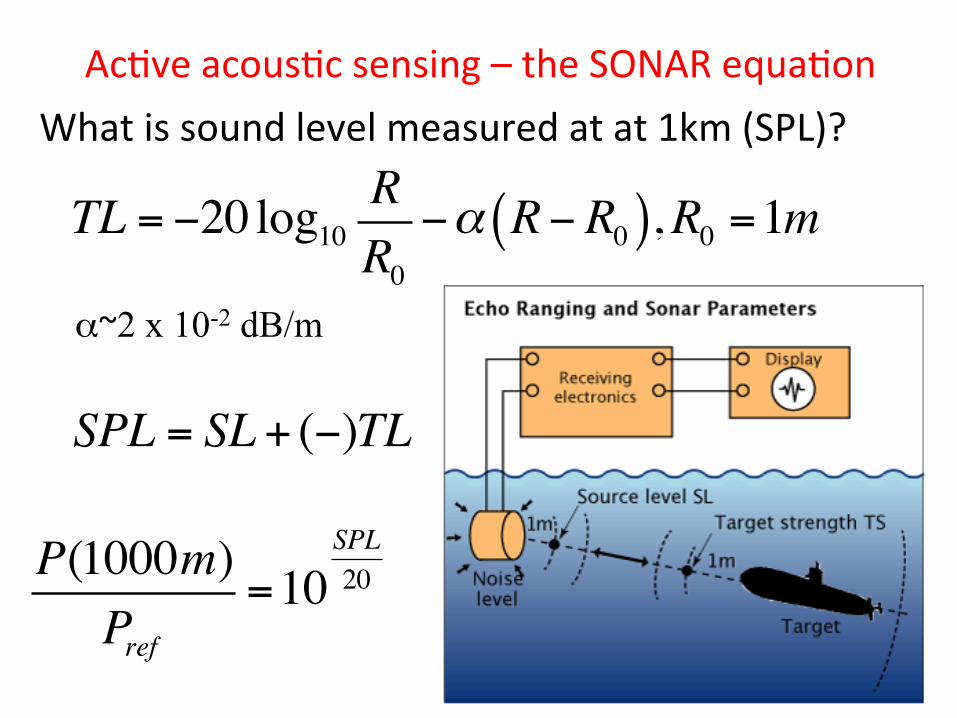
Ac#ve acous#c sensing – the SONAR equa#on What is sound level measured at at 1km (SPL)?
TL = −20 log10RR0−α R− R0( ),R0 =1m
α~2 x 10-2 dB/m
SPL = SL + (−)TL
P(1000m)Pref
=10SPL20
13
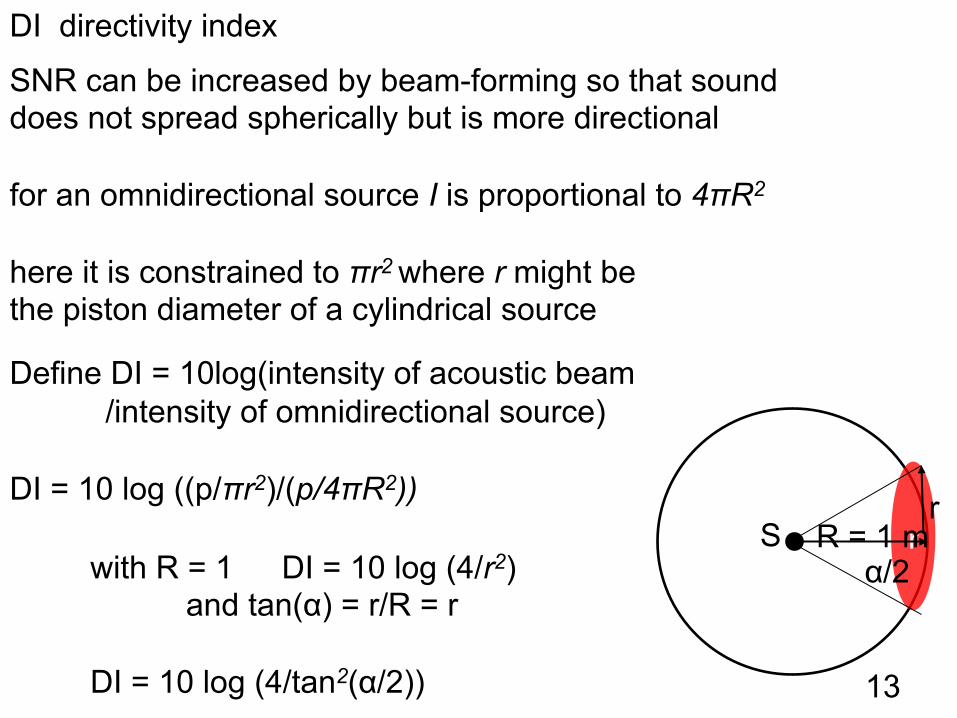
SNR can be increased by beam-forming so that sound does not spread spherically but is more directional for an omnidirectional source I is proportional to 4πR2
here it is constrained to πr2 where r might be the piston diameter of a cylindrical source
Define DI = 10log(intensity of acoustic beam /intensity of omnidirectional source)
DI = 10 log ((p/πr2)/(p/4πR2))
S r R = 1 m r
α/2 with R = 1 DI = 10 log (4/r2) and tan(α) = r/R = r
DI = 10 log (4/tan2(α/2))
DI directivity index
14
SNR can be increased by beam-forming produced by an array of transducers (perhaps in a single head or maybe distributed geographically) the directivity index DI represents this advantage for a particular array so that
SNR = SL + TL – N + DI N-noise ideally, detection is possible when the signal is sufficiently close and not disguised by noise …
that is, when SNR > 0 however, due to the nature of the signal, interference, the sonar operator’s training and alertness, etc … something more than 0 is necessary this extra appears as a detection threshold, DT we now write the SONAR EQUATION in terms of a signal excess SE
SE = SL + TL – N + DI – DT this is now the difference between the actual received signal at the output of the beamformed array and minimum signal required for detection
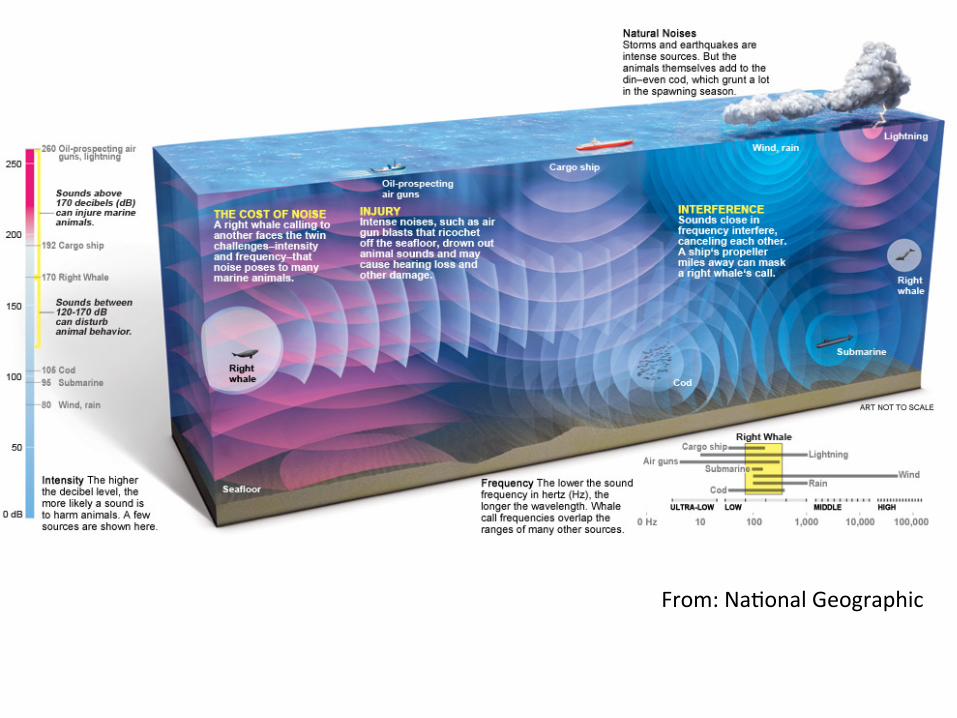
From: Na#onal Geographic

Example of underwater sounds: Earthquake [movie] Rain [website] Breaking waves [website] Ice grinding on seafloor [website] Man made [website] Marine mammals [website], fish [website]

Wenz diagram:
From: hUp://www.dosits.org/
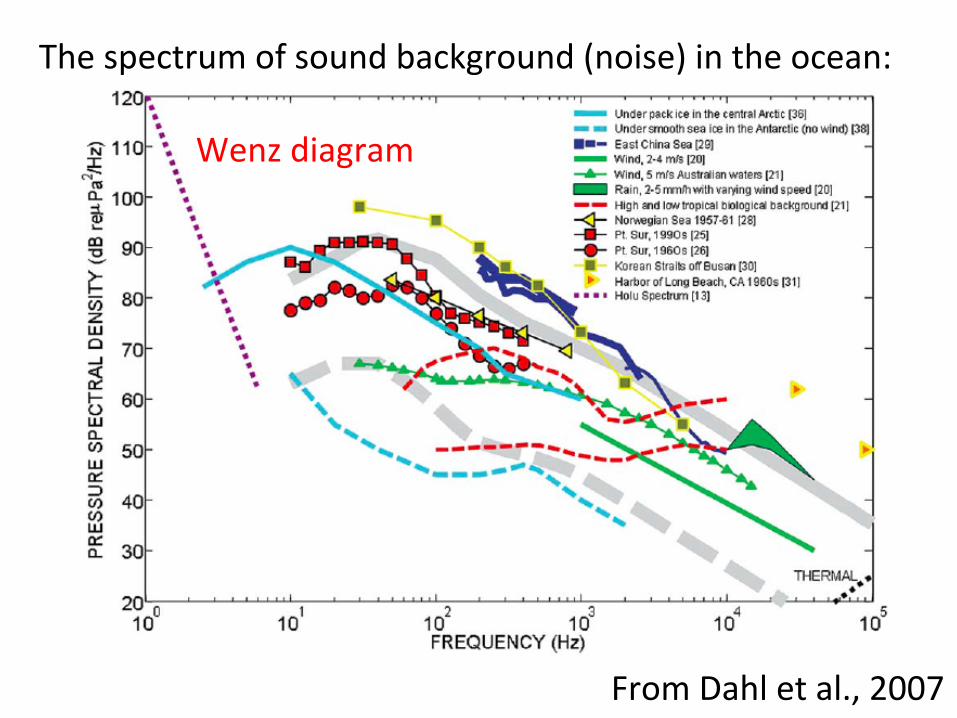
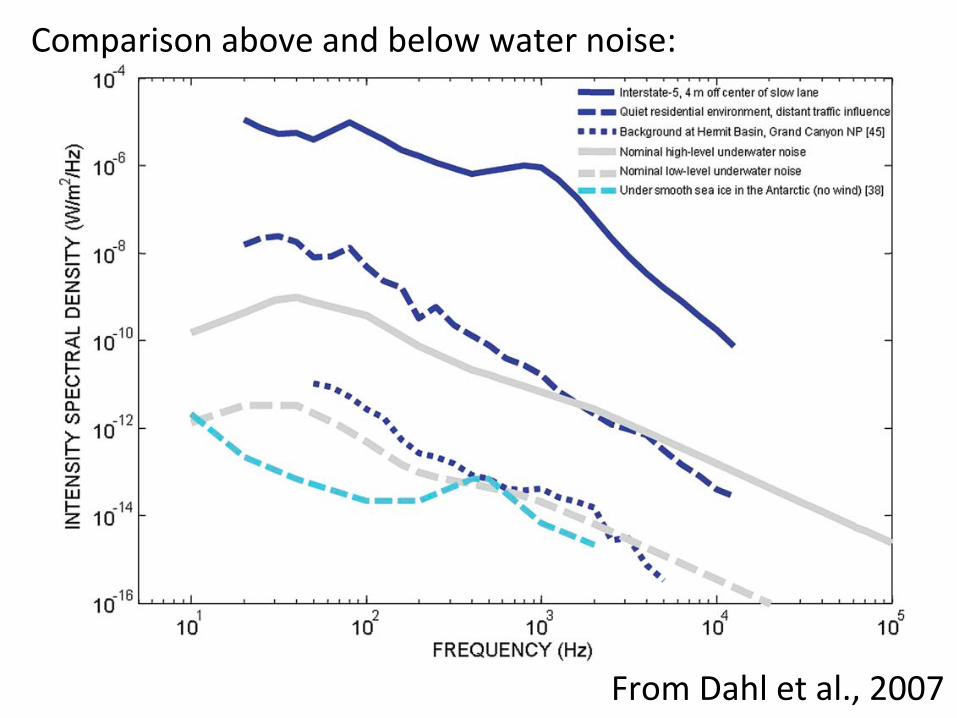
The spectrum of sound background (noise) in the ocean:
Wenz diagram
From Dahl et al., 2007
From Dahl et al., 2007
Comparison above and below water noise:
20
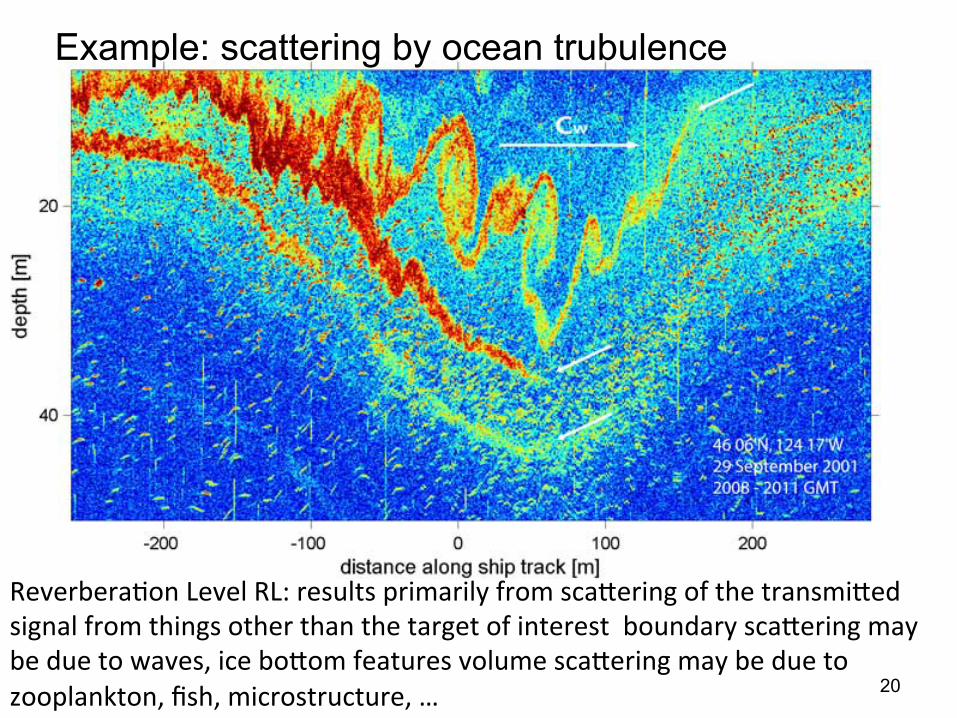
Example: scattering by ocean trubulence
Reverbera#on Level RL: results primarily from scaUering of the transmiUed signal from things other than the target of interest boundary scaUering may be due to waves, ice boUom features volume scaUering may be due to zooplankton, fish, microstructure, …
So, there are essen#ally two types of background that may mask the signal that we wish to detect:
1) Noise background or Noise Level (NL). This is an essen#ally a steady state, isotropic (equal in all direc#ons) sound which is generated by amongst other things wind, waves, biological ac#vity and shipping. This is in addi#on to transducer system self-‐noise. (Wenz curves)
2) Reverbera5on background or reverbera#on level (RL). This is the slowly decaying por#on of the back-‐scaUered sound from one's own acous#c input. Excellent reflectors in the form of the sea surface and floor bound the ocean. Addi#onally, sound may be scaUered by par#culate maUer (e.g. plankton) within the water column. You will have experienced reverbera#on for yourself. For example if you shout loudly in a cave you are likely to here a series of echoes reverbera#ng due to sound reflec#ons from the hard rock surfaces. These reverbera#ons decay rapidly with #me.
22
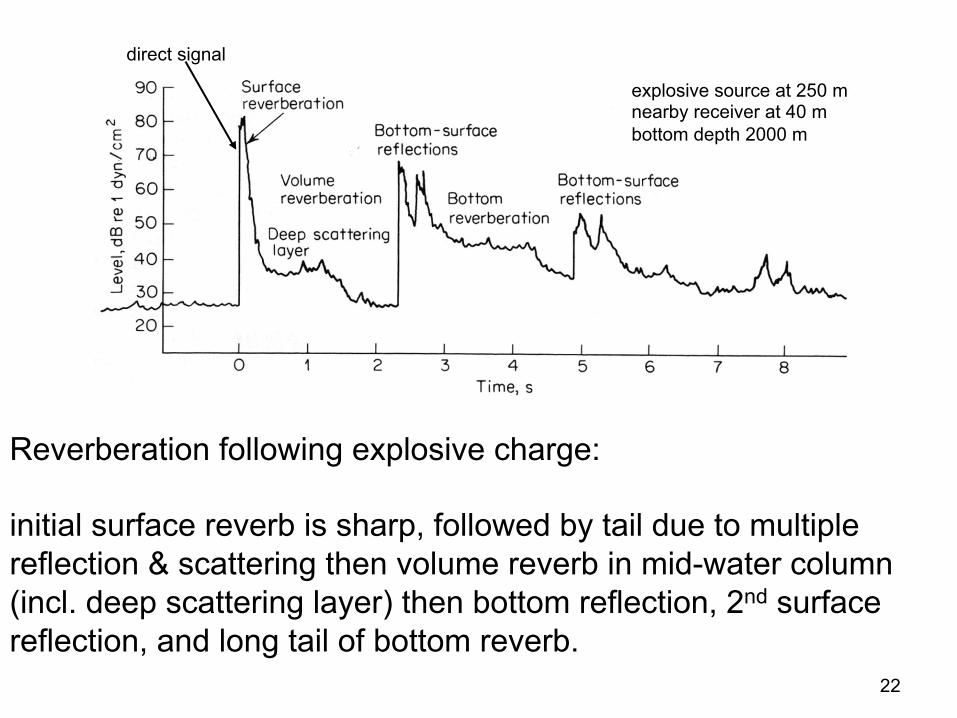
Reverberation following explosive charge: initial surface reverb is sharp, followed by tail due to multiple reflection & scattering then volume reverb in mid-water column (incl. deep scattering layer) then bottom reflection, 2nd surface reflection, and long tail of bottom reverb.
explosive source at 250 m nearby receiver at 40 m bottom depth 2000 m
direct signal
23
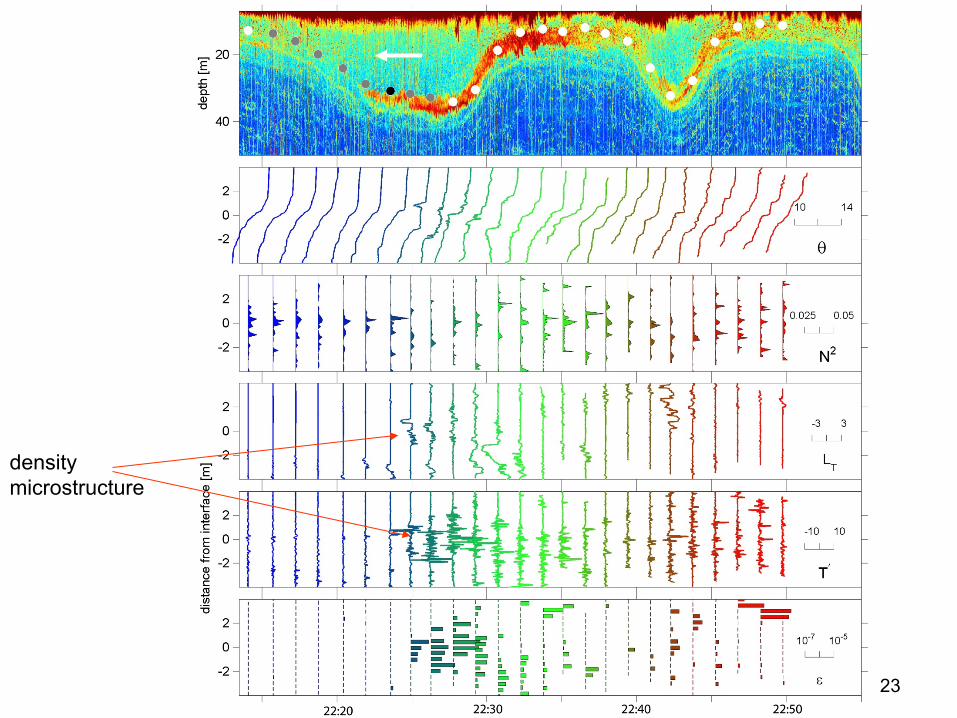
density microstructure
24
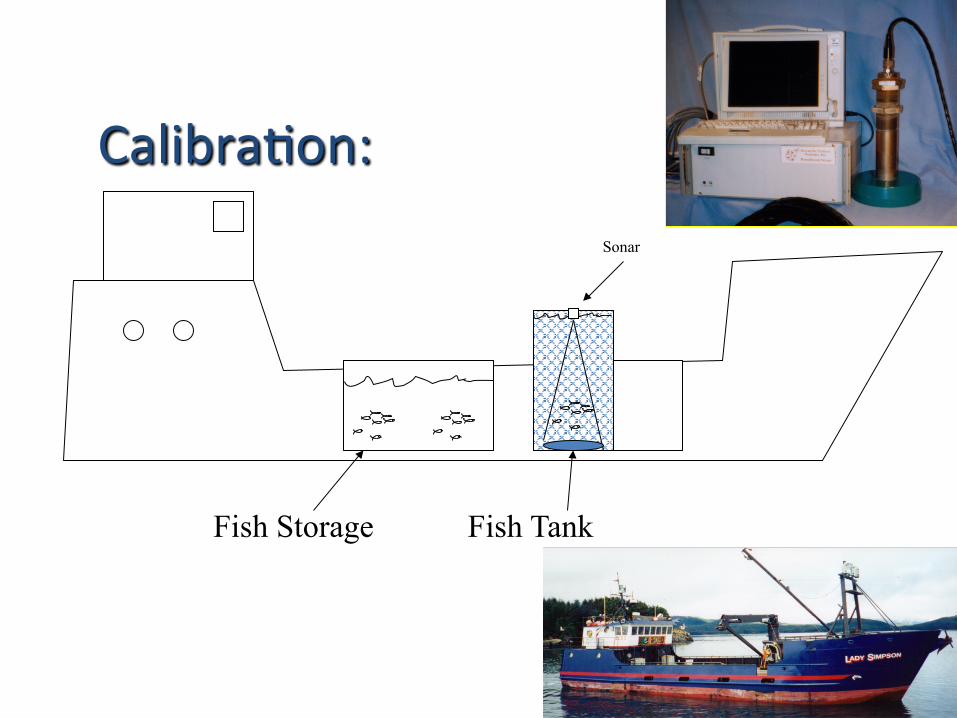
Fish Storage Fish Tank
Sonar
Calibra#on:
11/6/12 SMS 204: Integrative Marine Sciences II 25
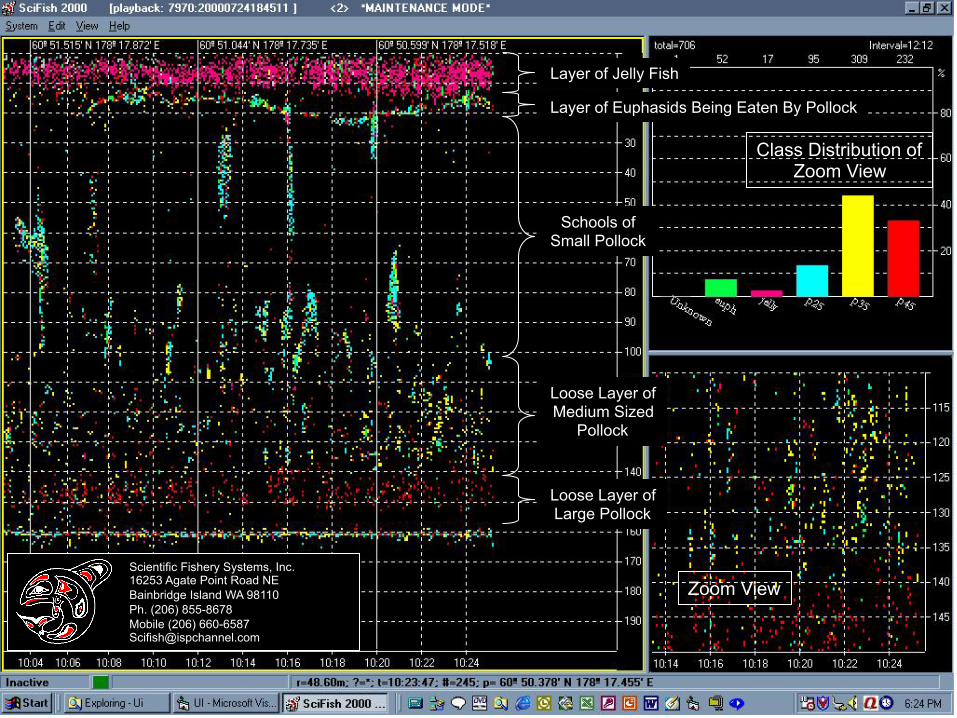
SciFish 2000: Broadband Fish ID Sonar
Layer of Jelly Fish
Layer of Euphasids Being Eaten By Pollock
Schools of Small Pollock
Loose Layer of Medium Sized
Pollock
Loose Layer of Large Pollock
Zoom View
Class Distribution of Zoom View
Scientific Fishery Systems, Inc. 16253 Agate Point Road NE Bainbridge Island WA 98110 Ph. (206) 855-8678 Mobile (206) 660-6587 [email protected]
26





























