Embed Size (px)
Citation preview

ASSOCIATE LABORATORY INSTITUTE FOR SYSTEMS AND ROBOTICS
LISBON
ISR-LISBON IMAR - Azores
IN+ CREMINER
ACTIVITIES REPORT (preliminar version)
2005
ISR – Torre Norte, IST Av. Rovisco Pais, 1049-001 Lisboa, PORTUGAL Fax: 351-21-8418291 Tel: 351-21-8418289 E-mail: [email protected]

Activity Report (Short Version)-2005 ISR-Lisbon Associate Laboratory
2 ISR-Lisbon IN+
CREMINER IMAR-Azores
Introduction ................................................................................................................................................................ 3
Management Structure of the AL............................................................................................................................ 6
Thematic Area A: Technologies for Ocean Exploration...................................................................................... 7 1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005 .............................................................................. 7 2 – INDICATORS IN 2005 .................................................................................................................................... 7
Thematic Area B: Robotic Monitoring and Surveillance .................................................................................... 8 1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005 .............................................................................. 8 2 – HUMAN RESOURCES IN 2005................................................................................................................... 13 3 – INDICATORS IN 2005 .................................................................................................................................. 13 4 – DESCRIPTION OF INDICATORS IN 2005 ................................................................................................ 14 5 – R&D PROJECTS ACTIVE IN 2005............................................................................................................... 24 6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005 ...................................................................................................................................... 41 7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS ........................... 41
Thematic Area C: Sustainable Technologies and Environmental Systems................................................... 44 1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005 ............................................................................ 44 2 – HUMAN RESOURCES IN 2005................................................................................................................... 44 3 – INDICATORS IN 2005 .................................................................................................................................. 44 4 – DESCRIPTION OF INDICATORS IN 2005 ................................................................................................ 45 5 – R&D PROJECTS active in 2005..................................................................................................................... 56 6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005 ...................................................................................................................................... 62 7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS ........................... 63
Thematic Area D: Signal Processing for Communications Networks and Multimedia ............................. 64 1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005 ............................................................................ 64 2 – HUMAN RESOURCES IN 2005................................................................................................................... 67 3 – INDICATORS IN 2005 .................................................................................................................................. 67 4 – DESCRIPTION OF INDICATORS IN 2005 ................................................................................................ 67 5 – R&D PROJECTS active in 2005..................................................................................................................... 71 6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005 ...................................................................................................................................... 72 7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS ........................... 72

Introduction ISR-Lisbon, together with three other partner research institutions, IN+, IMAR-Azores and Creminer, was awarded by the Ministry of Science and Technology, the status of Associate Laboratory (AL) starting January 2002. This status was awarded by a period of 10 years with a mid term external evaluation, in recognition of the high scientific merit of the institution (and its partner institutions) according to external international and independent evaluations, and on the basis of the proven capacity for cooperating, on a steady, competent and efficient form, in the implementation of the specific objectives of the national scientific and technological policies. 2004 was the fourth year of activities of the Associate Laboratory ISR-Lisbon and work has been done in cooperation by the four research units that integrate the AL. The main indicators that reflect the activities of the AL are listed in the table.
Total
A - Publictions Books (author) 8 Books (editor) 4 Books (chapters in book) 14 Papers in International Journals 96 Papers in National Journals 6
B - Communications Papers in International Conferences 122 Papers in National Conferences 58
C- Reports 39
D - Organization of Seminars and Conferences 38
E - Advanced Training Ph.D Thesis (concluded) 21 M. Sc. Thesis (concluded) 32 Others
F - Models
G - Software Applications 1
H - Pilot Instalations
I - Laboratory Prototypes
J - Patents As a result of the overall activity, 32 M.Sc. and 21 Ph.D. theses were concluded, 8 books authored by AL elements were published, 4 books were edited, 14 papers were published in books, 96 papers were published in well known international journals, and 122 papers presented at prestigious international conferences. Moreover, a large number of international events were organized. The particularly high number of active contratualized projects should also be stressed. In 2005 the Associate Laboratory teaching staff has offered several courses in Doctoral and Master Programs, as well as other post-graduate level courses. Also seminars were organized in a regular basis. Special attention was given to the active promotion of scientific culture and public understanding of science, both within Portugal and Worldwide. Within this context the Associate Laboratory has participated in a number of initiatives aiming to increase the levels of public understanding, awareness of, and involvement in, issues concerning science and technology. In 2002 a substantial effort was made to prepare two proposals to the “Programa Nacional de Re-equipamento Científico”, of the “Fundação para a Ciência e a Tecnologia (FCT)” that further establishes strategic research directions and includes several pieces of equipment that are of utmost importance for

Activity Report – 2005 ISR-Lisbon Associate Laboratory
4 ISR-Lisbon IN+
CREMINER IMAR-Azores
the full development of the R&D goals. The two proposals are entitled Science and Technology for Ocean Exploration: Towards the Development of an Environment Observatory in the Azores, with the intervention of ISR-Lisbon, IMAR-Azores and Creminer, and Networks of Autonomous Systems for Monitoring, Mapping and Surveillance involving ISR-Lisbon and IN+. The program was frozen during more than two years and, finally, results were announced in September 2004. The approved funding was 1.100.000€ and 400.000€, respectively. During 2005 the process of international biding was launch and the second project executed around 40% of the total budget. Some new devices equipped now the labs at ISR/IST and IN+.
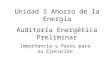
The level of funding that the Associate Laboratory received during the last trimester of 2004 could predict the complete fulfillment of the contract with the Portuguese Science and Technology Foundation (FCT). However, the situation in 2005 does not confirm the regularization. The evolution of the budget under contract, the actual received funds and the real executed expenses are plotted in Figure 1 for the four year period starting in 2002. The variability of the received funds and the unpredictability of the receiving schedule prevent the adoption of any serious scientific strategic plan, in particular the hiring of PhD researchers that constitutes one of the added values of the Associate Laboratory.
,00
200 000,00
400 000,00
600 000,00
800 000,00
1 000 000,00
1 200 000,00
1 400 000,00
1 600 000,00
1 800 000,00
2002 2003 2004 2005
(Eur
os)
Budget under contract Received funds Real expenses
Figure 1 – Budget, funds and expenses in the years 2002 to 2005
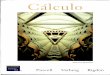
Additionally, FCT kept the methodology of only paying executed expenses and having no major advance payments, which, in the limit, is a process whose trend on the executed budget tends to zero. Figure 2 illustrates the difference on real expenses and received funds in the period from 2002 to 2005.
Figure 2 – Received funds and expenses in [2002-2005]

Activity Report – 2005 ISR-Lisbon Associate Laboratory
5 ISR-Lisbon IN+
CREMINER IMAR-Azores
Regardless the persistent unpredictability on the availability of funds, the process of contracting PhD researchers proceeded during 2005. Two new Ph.D researchers with a three years contract start their activity at ISR/IST and IN+ and calls were launched for four new positions. Additionally, a technician was contracted under the frame of the Associate Laboratory. This situation may lead, in the future, to a serious budget problem in case FCT does not provide the necessary funds to support these contracts. However, we deeply believe that FCT will make all the necessary efforts to overcome the problem. As a closing remark I would like to stress the fact that despite the financial difficulties, activities in 2005 were developed at high standards with an increase in the international visibility and in e number of projects under contract. This was only possible due to a research team of well motivated and enthusiastic senior and young researchers as well as post-docs, Ph.D and M.Sc students. Many people have contributed to this report and I would like to herein acknowledge their efforts. I hope that the report is of use to all its readers and to the agencies and foundations that support our activities and that it proves the importance and quality of our on-going activities. Isabel Ribeiro Director of ISR-Lisbon Vice-Director of ISR-Lisbon during 2005

Activity Report – 2005 ISR-Lisbon Associate Laboratory
6 ISR-Lisbon IN+
CREMINER IMAR-Azores
Management Structure of the AL During 2005 the composition of the Management Boards of the Associate Laboratory was the following:
Executive Board João Sentieiro – President, Director of ISR-Lisbon Paulo Ferrão – Director of IN+ Ricardo Serrão Santos – Director of IMAR-DOP/Univ.Azores Fernando Barriga – Director of CREMINAR
Managers of Thematic Areas António Pascoal – Thematic Area A José Santos-Victor – Thematic Area B Paulo Ferrão – Thematic Area C Victor Barroso – Thematic Area D (up to October 2005) João Paulo Costeira – Thematic Area D (after October 2005)
Coordinating Board Executive Board + Managers of Thematic Areas

Thematic Area A: Technologies for Ocean Exploration Activity Report
2005
1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005 n.a.
2 – INDICATORS IN 2005
Area A
A - Publictions Books (author) 5 Books (editor) 1 Books (chapters in book) 7 Papers in International Journals 70 Papers in National Journals 4
B - Communications Papers in International Conferences 73 Papers in National Conferences 40
C- Reports 26
D - Organization of Seminars and Conferences 4
E - Advanced Training Ph.D Thesis (concluded) 18 M. Sc. Thesis (concluded) 13 Others 13
F - Models 2
G - Software Applications
H - Pilot Instalations 1
I - Laboratory Prototypes 8
J - Patents 0

Thematic Area B: Robotic Monitoring and Surveillance Activity Report
2005
1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005
During the year of 2005, the work conducted under the thematic area of “Robotic Monitoring and Surveillance”, proceeded without significant deviations from the original plan. The strategic objectives remain as defined to: (i) create new methodologies and knowledge in the enabling disciplines of Computer Vision, Robot Navigation, Distributed Control and Decision Making and (ii) demonstrate the use of such methodologies in challenging applications with possible societal impact.
Most of the initiatives undertaken in the thematic area are aligned with either one or the other of these dual strategic objectives and, sometimes, both. In particular, a significant number of formalized research projects were ongoing during 2005 and these projects cover both the basic methodologies and some of the relevant application areas, as defined in the technical annex.
Of particular emphasis during 2005, were two internal initiatives aiming at promoting the exchange and dissemination of ideas amongst ISR researchers and particularly, those with scientific interests related to this thematic area. One initiative was the “ISR Demo Day” (March 2005), organized to show the activities related to the Thematic Area B to all ISR researchers and graduate students. The second initiative was the “1st ISR Thematic Workshop on “Robotic Monitoring and Surveillance”, (June 2005). This informal workshop consisted of 15 technical presentations by ISR researchers and graduate students, in addition to a debate panel. The goal consisted of disseminating inside ISR the research done in the context of Robotic Monitoring and Surveillance.
In what follows, we describe the main achievements in the Thematic Area for each of the main application areas.
D1 – DISTRIBUTED DECISION MAKING (SEARCH AND RESCUE)
Part of the work done during 2005 was focused on the navigation methodologies for outdoor vehicles, with an emphasis on topological mapping, navigation and localization. A topological map is a representation of the environment with no metric information available, and where different places correspond to nodes/states of the map. Localization and motion between the states of the map are obtained through a probabilistic approach and also rely on topological information. The main achievement is the definition and demonstration of the applicability of mobile robot navigation in unstructured environments based on a high level of abstraction.
The mapping work concentrated on particular aspects of feature extraction, from raw data acquired by the robot on-board sensors, and feature selection. Feature extraction considered and compared edges, histogram parameterization, PCA and ICA. The quality of an extracted feature for mapping purposes is analyzed along two different perspectives: time/space and correlation with already used features. A selection criteria was defined and tested aiming at having the minimum number of features

Activity Report – 2005 ISR-Lisbon Associate Laboratory
9 ISR-Lisbon IN+
CREMINER IMAR-Azores
to characterize each state of the topological map.
A probabilistic approach for localization and navigation based on an optimized version of Forward-Backward algorithm was developed.
Other navigation work was developed concerning Guidance, Navigation and Control of formation flying spacecraft. Novel methods for optimal (in terms of fuel consumption) guidance, which plan a trajectory without collisions for 3 spacecraft to achieve their desired formation geometry, starting far apart from each other, and decentralized low-communication full state estimation of the whole team, were proposed.
Another important topic of research was learning cooperative navigation in the absence of communication. Such cooperative procedures are meant to support the navigation of a set of autonomous robots moving in a common environment, executing a pre-defined task. In a first stage, the goal of this work is to develop a set of analysis tools that allow determining the necessary conditions to accomplish the proposed mission, given a set of robots. They also allow determining, which situations may prevent the team from succeeding in its mission. This set of tools will make use of some known results on discrete-event systems and automata theory.
In a second stage, currently under development in 2005, the work addressed the problem of decision making under uncertainty, namely the problem of Partially Observable Markov Processes. In this stage, the work addressed the problem of optimal decision making when facing partial information regarding the environment. A thorough characterization of the type of solution sought was derived, a learning algorithm was proposed, and a convergence analysis was performed. The subject of Reinforcement Learning under Partial Observability has been the subject of some work, by the Reinforcement Learning community, but there are not too many proposed algorithms so far, and the core of the problem is not yet well explored. Once this stage is concluded, the problem of multi-robot coordination will be addressed, in the absence of communication, possibly relying upon results in game-theory and some work already done on multi-agent Reinforcement Learning.
Further work on the use of discrete event systems to model robotic tasks, namely those of cooperative nature, involving at least 2 robots, was developed. Part of the work concerned determining the optimal plan for a team of 2 robots playing an adversarial game, whose behaviors are modeled by Finite State Automata (FSA). Exponential distributions were assigned to the interevent times for uncontrollable events, thus adding action effects uncertainty to the model. All FSA were composed to obtain the complete model of a team situated in its environment and the resulting Stochastic Timed Automaton converted into a Markov Chain. The optimal selection of the controllable events for each state (policy π) was obtained using a Dynamic Programming algorithm. Further work consisted on using Petri nets and associating the current primitive action running plus all the required resources to places and events to transitions. Events are defined as changes of logical value of predicates whose arguments are world objects. Places can also represent communication messages of explicit, (e.g., obtained through wireless comms) or implicit (e.g., observed by vision) nature. This way, commitment and synchronization signals can be exchanged among robots involved in a cooperative relation.
Regarding technological developments, one highlight is the development of the outdoors RAPOSA vehicle for rescue operations (picture below), a project developed in consortium with a Portuguese SME which was an ISR spin-off. This is a tele-operated vehicle carrying several sensors and cameras on-board, whose main innovation is the capacity of switching between tethered and untethered operation remotely, supported by a vision-based docking system, with the operator in the loop.
Further technological developments concerned the development, together with external partners, of 5 three-wheeled omnidirectional robots for indoors environments, specially designed for playing robotic soccer, but endowed with several sensors (omnidirectional catadioptric vision, sonar ring, rate-gyro, optical mouse) and open software and hardware.
D2 – SURVEILLANCE OF URBAN AREAS

Activity Report – 2005 ISR-Lisbon Associate Laboratory
10 ISR-Lisbon IN+
CREMINER IMAR-Azores
The work on surveillance of urban areas aims to respond to the challenge of processing massive quantities of video as more and more cameras are being deployed in pubic spaces. While tracking an individual is a necessary condition to be able to characterize the observed scenario, it is by far not enough to really “understand” the observed activities.
The work carried out in this sub-topic addressed issues at different levels. One direction of work was the development of tracking techniques applicable in images of cluttered environments, non rigid-objects, handling occlusions, etc. For example, on of the main focus of this work concerned group tracking, particularly identifying individual targets after they meet and split again. This approach used relied on Bayesian networks to propagate information over time. The goal of this work is to disambiguate group occlusions and changes (merges and splits) in order to know which persons belong to each group and track them along the time. This work was done in the scope of LTT project.
Work was also carried out in the topic of tracking an articulated object. The focus of the work was the human hand, an object extremely difficult to track because of severe and frequent occlusions. The tracker is based on a kinematic model of the human hand used to estimate the hand pose frame by frame.
The second main area of work in this topic is that of human activity recognition from video. We pursued two different approaches. One approach consisted in using information of tracked trajectories over time and construct models that encapsulate the temporal behavior of the observed person. In a way, the image information is relatively sime and the ability to “understand” is captured in the model. Another distinct direction was to determine image features that could be used directly to discriminate short-term activities. Here, the holiy grail consists in finding the interesting features and, having found such features, the classification problem becomes simpler. Techniques for feature selection, classifier design and boosting were used for this purpose. Part of this work has been conducted in the framework of the European Project CAVIAR.
Another highlight during 2005 was the organization of the 1st International Workshop on Human Activity Recognition and Modeling, in conjunction with BMVC.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
11 ISR-Lisbon IN+
CREMINER IMAR-Azores
D3 – ROBOTIC ASSISTANT
In 2005, the Baltazar robot was fully operational. It consists of an articulated arm-hand (17 degrees of freedom underactuated with 10 motors), a binocular head with two cameras and four degrees of freedom. (see picture).
Work has been carried out in sensori-motor coordination. The robot can learn how to control its arm through experimentation and observing the visual consequences of the arm motion.
These mas can be defined with different sorts of information. They can be static, in the sense that they relate motor-perceptual positions or configurations. Alternatively they can by dynamic if they related motor-perceptual velocities (Jacobians). Finally, they can be full or partial, depending on whether or not all the available degrees of freedom are involved. Methods for learning partial sensori-motor maps have been proposed and implemented.
Having learned these sensori-motor maps, the robot can learn how to manipulate and explore the properties of objects. Finally, the robot can imitate gestures (actions) performed by a demonstrator.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
12 ISR-Lisbon IN+
CREMINER IMAR-Azores
This work is developed in the framework of the RobotCub project, the largest effort in Europe and worldwide for the development of humanoid platforms for the study of human cognition. In RobotCub, the IST/ISR team is responsible for developing the head as well as for some of the work on cognitive development.
Recently, work was carried out on the design of the iCub face in such a way that it could elicit social interaction and expressed is internal status or motivations. See picture below for some initial ideas using lights inside the robots face.
CONCLUSIONS
During 2005, the work proceeds well and no major deviations occurred with relation to the worklpan. The particularly high number (14) of active contractualized projects should be stressed. The work done is balanced between the development of novel methodologies in the enabling disciplines and the demonstration of these achievements in the demonstration areas.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
13 ISR-Lisbon IN+
CREMINER IMAR-Azores
2 – HUMAN RESOURCES IN 2005
PhD researchers (staff) - 11 (from which 0 foreigners) PhD researchers (Post-Doctoral fellows) – 3 (from which 1 foreigner) PhD students - 17 (from which 3 foreigners) MSc students – 11 (from which 0 foreigners) Engineers – 4 (from which 1 foreign) Technicians - 1
3 – INDICATORS IN 2005
A – Publications Books (author) Books (editor) 3 Books (chapters in books) 4 Papers in international journals 7 Papers in national journals -
B - Comunications In international conferences 25 In national conferences 5
C- Reports 5 D – Organization of Seminars and Conferences International Events 4 Seminars and internal workshops 4
E – Advanced Training Ph.D Thesis (concluded) 1 M.Sc Thesis (concluded) 4 Others - Ph.D Thesis in progess 13 M.Sc Thesis in progress 9
F - Models -
G – Software Applications 1
H - Pilot Instalations I - Laboratory Prototypes
J - Patents -
K - Awards
L – Invited Oral Presentations 6

Activity Report – 2005 ISR-Lisbon Associate Laboratory
14 ISR-Lisbon IN+
CREMINER IMAR-Azores
4 – DESCRIPTION OF INDICATORS IN 2005
A - 2) BOOKS (EDITOR) (3)
[1] Jorge S. Marques, Nicolás Pérez de la Blanca, Pedro Pina, (Eds.), Pattern Recognition and Image Analysis, Part I, Springer, Lecture Notes in Computer Science, ISBN: 3-540-26153-2, Vol. 3523, 703 p., 2005.
[2] Jorge S. Marques, Nicolás Pérez de la Blanca, Pedro Pina, (Eds.), Pattern Recognition and Image Analysis, Part II, Springer, Lecture Notes in Computer Science, ISBN: 3-540-26154-0, Vol. 3523, 733 p., 2005.
[3] Daniele Nardi, Martin Riedmiller, Claude Sammut, J.Santos-Victor, “RobotCup 2004 Symposium”, Springer Verlag, Berlin, 2005.
A-3) CHAPTERS IN BOOKS (4) [4] P. Lima, L. Custódio, “Multi-Robot Systems”, Chapter I of Innovations in Robot Mobility and Control, S.
Patnaik, S. Tzafestas, Eds., Springer Verlag, Berlin, 2005.
[5] P. Lima, L. Custódio, “RoboCup 2004 Overview”, RoboCup-2004: Robot Soccer World Cup VIII, Springer Verlag, Berlin, 2005.
[6] F. Melo, M. I. Ribeiro, P. Lima, “Navigation Controllability of a Mobile Robot Population”, RoboCup-2004: Robot Soccer World Cup VIII, Springer Verlag, Berlin, 2005.
[7] B. Van der Vecht, P. Lima, “Formulation and Implementation of Relational Behaviours for Multi-Robot Cooperative Systems”, RoboCup-2004: Robot Soccer World Cup VIII, Springer Verlag, Berlin, 2005.
A -4) IN INTERNATIONAL JOURNALS (7) [8] J. Sequeira, M. I. Ribeiro, “Robot Team Control: A Geometric Approach”, Journal of Robotics and
Autonomous Systems, Vol. 53, No. 1, pp. 59-71, 2005.
[9] P. Tabuada, G. Pappas and P. Lima, “Motion Feasibility of Multi-Agent Formations”, IEEE Transactions on Robotics, Vol. 21 (3), pp. 387-392, June 2005.
[10] P. Lima, L. Custódio, I. Akin, A. Jacoff, G. Kraezschmar, B. Kiat Ng, O. Obst, T. Röfer, Y. Takahashi, C. Zhou, “RoboCup 2004 Competitions and Symposium: A Small Kick for Robots, a Giant Score for Science”, AI-Magazine, Vol. 6, Nº 2, Summer 2005.
[11] R. Carvalho, L. Custódio, “A Multiagent Systems Approach for Managing Supply-Chain Problems: new tools and results,” The Inteligencia Artificial Journal, Revista Iberoamericana de Inteligencia Artificial – Special Issue on Iberagents 2004, Vol. 9, Nr 25, 2005.
[12] E. Grossmann and J. Santos-Victor, “Least-squares 3D reconstruction from one or more views and geometric clues”, Computer Vision and Image Understanding, Vol. 99, No. 2, pp. 151-174, August 2005.
[13] M. Lopes and J. Santos-Victor, “Visual Learning by Imitation with Motor Representations”, IEEE Transactions on System Man and Cybernetics - Part B: Cybernetics, Vol. 35, No. 3, June 2005.
[14] J. Nascimento, J. S. Marques, “Adaptive Snakes Using the EM Algorithm”, IEEE Transactions on Image Processing, Vol. 14, Issue 11, pp. 1678 – 1686, November 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
15 ISR-Lisbon IN+
CREMINER IMAR-Azores
B-1) IN INTERNATIONAL CONFERENCES (25)
[15] J. Sequeira, M. I. Ribeiro, “Hybrid Control of Semi-Autonomous Robots”, Proc. of ISR2004 - 36th International Symposium on Robotics, Tokyo, Japan, November 29 - December 1, 2005.
[16] P. Cruz, R. Ferreira, J. Sequeira, “Kinematic Modeling of Stewart-Gough Platforms”, Proc. ICINCO 2005 - 2nd International Conference on Informatics, Control, Automation and Robotics, Barcelona, Spain, September 2005.
[17] G. Neto, P. Lima, “Minimax Value Iteration Applied to Robotic Soccer”, Proc. of ICRA2005 - IEEE Workshop on Cooperative Robotics, Barcelona, Espanha, April 2005.
[18] R. Carvalho, L. Custódio, “A Multiagent System Approach for Managing Supply-Chain Problems: a learning perspective”, Proc. of KIMAS2005 - International Conference Integration of Knowledge Intensive Multi-Agent Systems, Waltham, Massachusetts, USA, April 2005.
[19] P. Ribeiro and J. Santos-Victor, “Human Activity Recognition from Video: modeling, feature selection and classification architecture”, Proc. HAREM2005 - BMVC Workshop on Human Activity and Modelling, Oxford, UK, September 2005.
[20] P. Moreno, A. Bernardino and J. Santos-Victor, “Appearance based salient point detection with intrinsic scale frequency descriptor”, Proc. VIIP - IASTED Conference on Visualization, Imaging and Image Processing, Benidorm, Spain, September 2005.
[21] Luis Montesano, J. Gaspar, J. Santos-Victor and Luis Montano, “Cooperative localization by fusing vision-based bearing measurements and motion”, Proc. IROS2005 - IEEE/RSJ International Conference on Intelligent Rrobots and Systems, Edmonton, Alberta, Canada, August 2005.
[22] R. Ferreira, J.P. Costeira and João A. Santos, "Stereo Reconstruction of a Submerged Scene", Proc. IBPRIA2005 - 2nd Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, June 2005.
[23] A. Bernardino, J. Santos-Victor, “A Real-Time Gabor Primal Sketch for Visual Attention”, Proc. IBPRIA2005 - 2nd Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, June 2005.
[24] P. Moreno, A. Bernardino, J. Santos-Victor, “Gabor Parameter Selection For Local Feature Detection”, Proc. IBPRIA2005 - 2nd Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, June 2005.
[25] Filiberto Pla, P. Ribeiro, J. Santos-Victor, A. Bernardino, “Extracting Motion Features for Visual Human Activity Representation”, Proc. IBPRIA2005 - 2nd Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, June 2005.
[26] Luis Montesano, J. Gaspar, J. Santos-Victor, Luis Montano, “Fusing vision-based bearing measurements and motion to localize pairs of robots”, Proc. ICRA2005 - Workshop on Cooperative Robotics, Barcelona, Spain, April 2005.
[27] M. Lopes, A. Bernardino and J. Santos-Victor, “A Developmental Roadmap for Task Learning by Imitation in Humanoid Robots: Baltazar’s Story”, Proc. AISB2005 - Symposium on Imitation in Animals and Artifacts, University of Hertfordshire, UK, April 2005.
[28] D. Dumitriu, P. Lima, B. Udrea, “Optimal Trajectory Planning of Formation Flying Spacecraft”, Proc. of 16th IFAC World Congress, Prague, Czech Republic, July 2005.
[29] Jacinto Nascimento, Mário Figueiredo, Jorge S. Marques, “Recognition of Human Activities Using Space Dependent Switched Dynamical Models”, Proc. of ICIP2005 - IEEE International Conference on Image Processing, pp. 852-855, Genoa, Italy, September 2005.
[30] D. Hall, J. Nascimento, P. Ribeiro, E. Andrade, P. Moreno, S. Pesnel, T. List, R. Emonet, B. Fisher, J. Santos-Victor, J. Crowley, “Comparison of target detection algorithms using adaptive background models”, Proc. VS-PETS - 2nd Joint IEEE Internationmal Workshop on Visual Surveillance and Performance Evaluation of Tracking and Surveillance, held at ICCV2005, pp. 113-120, Beijing, China, October 2005.
[31] Margarida Silveira, Jorge S. Marques, “Multiple Active Contour Models Based on the EM Algorithm”, Proc. of ICIP2005 - IEEE International Conference on Image Processing, pp. 285-288, Genoa, Italy, September 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
16 ISR-Lisbon IN+
CREMINER IMAR-Azores
[32] João Sanches, José Bioucas- Dias, Jorge S. Marques, “Minimum Total Variation in 3D Ultrasound Reconstruction”, Proc. of ICIP2005 - IEEE International Conference on Image Processing, pp. 597-600, Genoa, Italy, September 2005.
[33] Pedro M. Jorge, Arnaldo J. Abrantes, Jorge S. Marques, “Tracking with Bayesian Networks. Extension to Arbitrary Topologies”, Proc. of ICIP2005 - IEEE International Conference on Image Processing, pp. 402-405, Genoa, Italy, September 2005.
[34] Jacinto C. Nascimento, Mário A. T. Figueiredo, J. S. Marques, “Segmentation and Classification of Human Activities”, Proc. of HAREM2005 - Workshop on Human Activity Recognition and Modelling, held at BMVC2005 - British Machine Vision Conference, pp. 79-86, Oxford, UK, September 2005.
[35] Rui M. Jesus, Arnaldo J. Abrantes, Jorge S. Marques, “Relevance Feedback in CBIR using the RLS Classifier”, Proc. of 5th EURASIP Conference focused on Speech and Image Processing, Multimedia Communications and Services, Smolenice, Slovak Republic, June 29 – July 2, 2005.
[36] J. G. Silva, J. S. Marques, J. M. Lemos, “Nonlinear Dimension Reduction with Tangent Bundle Approximation”, Proc. of ICASSP2005 - IEEE International Conference on Acoustics, Speech and Signal Processing, Vol. 4, pp. 85-88, Philadelphia, USA, March 2005.
[37] João M. Sanches, Jorge S. Marques, “A Fast MAP Algorithm Using High Order Gibbs Priors”, Proc. of ICASSP2005 - IEEE International Conference on Acoustics, Speech and Signal Processing, Philadelphia, USA, March 2005.
[38] Margarida Silveira, “An Algorithm for the Detection of Multiple Concentric Circles”, Lecture Notes in Computer Science – Pattern Recognition and Image Analysis, IbPRIA 2005, Vol..35223, pp. 271-278, Estoril, Portugal, June 2005.
[39] Jorge G. Silva, Jorge S. Marques, João M. Lemos, 2Selecting Landmarkpoints for Sparse Manifold Learning,” NIPS, 2005.
B-2) IN NATIONAL CONFERENCES (5) [40] P. Cruz, R. Ferreira, J. Sequeira, “Modeling Two Classes of Stewart-Gough Platforms”, Proc. of
ROBOTICA2005 – 5th Portuguese Robotics Festival, Coimbra, Portugal, April 2005.
[41] G. Almeida, J. Santos-Victor, P. Lima, “Controlo de um Manipulador Robótico Usando Visão”, Proc. ROBOTICA2005 – 5th Portuguese Robotics Festival, Coimbra, Portugal, April 2005.
[42] C. Sousa, L. Custódio, “Aprendizagem por Reforço num Sistema Multi-Agente: Comunicação e Cooperação”, Proc. ROBOTICA2005 – 5th Portuguese Robotics Festival, Coimbra, Portugal, April 2005.
[43] C. Oliveira e Sousa, L. Custódio, “Cooperative Reinforcement Learning: Exploring Communication and Cooperation Problems”, Proc. CIRA 2005 - 6th IEEE International Symposium on Computational Intelligence in Robotics and Automation, Espoo, Finland, June 2005.
[44] C. Oliveira e Sousa, L. Custódio, “Dealing with Errors in a Cooperative Multi-agent Learning System”, LAMAS 2005 - 1st Workshop on Learning and Adaptation in Multi-Agent Systems, Utrecht University, Netherlands, July 2005.
C-1) TECHNICAL REPORTS (5) [45] F. Melo, M. I. Ribeiro, “The Use of Transition Entropy in Partially Observable Markov Decision
Processes”, Technical Report, RT-601-05, Instituto de Sistemas e Robótica, pólo do Instituto Superior Técnico, January 2005.
[46] F. Melo, M. I. Ribeiro, “Convergence Results for Reinforcement Learning with Partial Observability”, Technical Report RT-602-05, Institute for Systems and Robotics, Instituto Superior Técnico, December 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
17 ISR-Lisbon IN+
CREMINER IMAR-Azores
[47] P. Lima, A. Caramagno, J. C. Bastante, D. Dumitriu, S. Marques, L. F. Peñin, J. A. Silva, “Formation Estimation Methodologies for Distributed Spacecraft – Phase II Final Report”, March 2005.
[48] J. Cristóvão, C. Marques, J. Frazão, P. Lima, M. I. Ribeiro, “RAPOSA Project - Final Report”, March 2005.
[49] Pedro U. Lima, João Costal, “WE 3230/PO - Control Loop Design & Simulation Final Report”, May 2005.
D-1) – ORGANIZATION OF INTERNATIONAL EVENTS IbPRIA 2005 - Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, 7-9 June, 2005 General Chairs: Jorge S. Marques, Nicolás Perez de la Blanca. Laboratories: Signal and Image Processing Group. Support: International Association for Pattern Recognition (IAPR), Portuguese and Spanish Associations for Pattern Recognition (APRP, AERFAI). Description: IbPRIA 05 was the second of this series of international conferences and was organized for the first time in Portugal. The conference had 180 researchers from 38 countries working in the areas of Pattern Recognition and Image Analysis. The conference was organized in a single track format with 30 oral presentations and 141 poster presentations and three invited speakers: Profs. David Lowe (British Columbia Univ), Wiro Niessen (Utrecht Univ.) and Isidore Rigoutsos (IBM). The proceedings were published by Springer Verlag in LNCS series (vol. 3522, 3523). URL: http://ibpria2005.isr.ist.utl.pt
HAREM 2005 – Workshop on Human Activity Recognition and Modelling, Oxford, UK, September 9th, 2005
Chair: Prof. José Santos Victor.
Laboratories: Vislab - Computer Vision Lab.
Description: The first International Workshop on Human Activity Recognition and Modelling was organized jointly with the British Machine Vision Conference, at Oxford Brookes University, Oxford, UK.
The call for papers elicited the submission of 25 high quality manuscripts from all over the world, exceeding our expectations for a one day workshop. The Program Committee carried out the thorough task of assessing the papers technical quality and their suitability for presentation at the workshop. A total of 13 papers were accepted for presentation, covering multiple domains related to Human Activity Recognition and Modeling and providing a unified vision of the state of the art and current challenges.
URL: http://www.isr.ist.utl.pt/~jasv/harem2005/
ROBOTCUB Meeting/Workshop, Estoril, Portugal, 17-19 March 2005
Organizers: Prof. José Santos Victor, Prof. Alexandre Bernardino.
Laboratories: Vislab – Computer Vision Lab.
Description: The first meeting of the RobotCub consortium held outside Italy was hosted by IST and held in Estoril, Portugal, in April 2005. The meeting consisted of a two-day workshop with about 50 participants, in addition to the project management meeting. The workshop included presentations from some of the partners in the consortium and invited speakers. The topics covered humanoid robot design, cognition, sensory-motor coordination, developmental psychology and robotic imitation, among others. A visit was organized to the ISR and IST.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
18 ISR-Lisbon IN+
CREMINER IMAR-Azores
IEEE ICRA 2005 Workshop on Cooperative Robotics, Barcelona, Spain, April 2005
Chairs: Prof. Pedro U. Lima, Prof. Alessandro Saffiotti, Örebro University, Sweden Laboratories: Intelligent Systems Lab Description: The domain of cooperative robotics is acquiring prominent importance in many key application areas. Teams of robots cooperatings among them and/or with humans can perform a variety of tasks in a faster, more reliable, and more flexible way than a single robot. The rapidly growing scientific and industrial interest in cooperative robotics makes this domain extremely important for graduate students and young researchers in the field of autonomous robotics. This workshop had four primary aims. First, to expose international researchers in general, and graduate students in particular, to the latest technologies for cooperative robotics. Second, to help young researchers and students to create an international network of contacts. Third, to consolidate the research community in this field, which is still somehow dispersed, especially in Europe. Fourth, to enhance the visibility of European research on cooperative robotics. The workshop had two invited speakers (Marco Dorigo and Gaurav Sukhatme) and 7 papers presented by student authors, out of the 14 submitted and reviewed by an international committee composed of senior researchers.
D-2) – ORGANIZATION OF SEMINARS AND INTERNAL WORKSHOPS
ISR Demo day – March 29th 2005. An open lab day war organized to show activities related to the thematic area B to all ISR researchers and graduate students. (http://omni.isr.ist.utl.pt/~jag/ISR_demo_day/)
1st ISR Thematic Workshop on “Robotic Monitorind and Surveillance”, June 24 – The workshop consisted of 15 technical presentations by ISR researchers and graduate students, in addition to a debate panel. The goal of this workshop consisted of disseminating inside ISR the research done in the context of Robotic Monitoring and Surveillance. http://users.isr.ist.utl.pt/~jseq/workshop2005/
Participation in the weekly seminars at ISR-Lisbon
Computer Vision weekly (and internal) seminar.
E-1) – Ph.D THESIS (concluded) (1) [50] Alberto Vale, “Mobile Robot Navigation in Outdoor Environments: A Topological Approach”, Ph.D.
Thesis, Instituto Superior Técnico, Lisbon, Portugal, June 2005.
E-2) – M. Sc THESIS (concluded) (4) [51] Vasco Pires, “Sistema de Decisão Distribuído Baseado em Lógica para uma Equipa Multi-Robot”,
Master Thesis, Instituto Superior Técnico, Lisbon, Portugal, July 2005. [52] Graça Almeida, “Controlo de um Manipulador Robótico Usando Visão”, Master Thesis, Instituto
Superior Técnico, Lisbon, Portugal, 2005. [53] José Inácio Rocha, “Inspecção e Manutenção Robótica em Linhas de Transporte de Energia Eléctrica de
Alta Tensão”, Master Thesis, Instituto Superior Técnico, Lisboa, Portugal, September 2005. [54] Ricardo Marranita, “Visual Tracking of Articulated Objects: an application to the Human Hand”,
Master Thesis, Instituto Superior Técnico, Lisbon, Portugal, November 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
19 ISR-Lisbon IN+
CREMINER IMAR-Azores
E-4) – Ph.D THESIS IN PROGRESS (13) Research Area: State Estimation for Satellite Formations Title: Decentralized Navigation Methods for Formation Flying Spacecraft Doctoral Student: Sónia Marques Advisor: Pedro Lima Initiated: September 2001 Expected conclusion: 2006 Current Status: On-going, finished PhD coursework Documents produced in 2005: [20] Research Area: Discrete-Event Based Modelling and Coordination of Robotic Tasks Title: Doctoral Student: Hugo Costelha Advisor: Pedro Lima Initiated: October 2003 Expected conclusion: 2007 Current Status: On-going, finished PhD coursework Documents produced in 2005: Research Area: Multi-Agent Reinforcement Learning for Stochastic Games Title: Doctoral Student: Gonçalo Neto Advisor: Pedro Lima Initiated: October 2003 Expected conclusion: 2007 Current Status: On-going, finished PhD coursework Documents produced in 2004: [10]
Research Area: Discrete-Event Based Opponent Modelling Title: Doctoral Student: Abdolkarim Pahliani Advisor: Pedro Lima Initiated: February 2005 Expected conclusion: 2009 Current Status: On-going PhD coursework Documents produced in 2005:
Research Area: Artificial Intelligence Title: Emotion-based Agents Doctoral Student: Rodrigo Ventura Advisor: Carlos Pinto-Ferreira Initiated: 2001 Expected conclusion: 2006 Current Status: On-going Documents produced in 2005: Research Area: Computer Vision Title: Vision based imitation Doctoral Student: Manuel Cabido Lopes Advisor: José Santos-Victor Initiated: 2002 Expected conclusion: 2006 Current Status: Submitted Grant: Documents produced in 2005: [3] [14]

Activity Report – 2005 ISR-Lisbon Associate Laboratory
20 ISR-Lisbon IN+
CREMINER IMAR-Azores
Research Area: Computer Vision Title: Recognition using Biological inspired filters. Doctoral Student: Plinio Moreno Lopez Advisor: José Santos-Victor Initiated: 2002 Expected conclusion: 2006 Current Status: On-going Grant: FCT Documents produced in 2005: [4] [6] [11] Research Area: Computer Vision Title: Recognition of Human Activities from video Doctoral Student: Pedro Canotilho Ribeiro Advisor: José Santos-Victor Initiated: 2003 Expected conclusion: 2007 Current Status: On-going Grant: FCT Documents produced in 2005: [4] [5] [12] Research Area: Computer Vision Title: Image matching Doctoral Student: Ricardo Ferreira Advisor: João Paulo Costeira Initiated: 2005 Expected conclusion: 2008 Current Status: On-going Grant: FCT Documents produced in 2005: Research Area: Cooperative Robotics Title: Learning Cooperative Navigation in the Absence of Communication Doctoral Student: Francisco António Saraiva de Melo Advisor: Isabel Ribeiro Initiated: 2003 Expected conclusion: 2006 Current Status: On-going Grant: FCT PhD grant SFRH/BD/3074/2000 Documents produced in 2005: [3] [8] [9] [13] Research Area: Hybrid Systems Title: Yet to be defined Master Student: Nelson Gonçalves Advisor: João Silva Sequeira Initiated: 2005 Expected conclusion: 2008 Current Status: Ongoing Grant: FCT SFRH/BD/23804/2005 Documents produced in 2005: Research Area: Video Analysis Title: Tracking groups of pedestrians Doctoral Student: Pedro Mendes Jorge Advisor: Jorge Salvador Marques Initiated: 2003 Expected conclusion: 2007 Current Status: On-going Grant: Documents produced in 2005: Research Area: Signal Processing

Activity Report – 2005 ISR-Lisbon Associate Laboratory
21 ISR-Lisbon IN+
CREMINER IMAR-Azores
Title: Manifold learning Doctoral Student: Jorge G. Silva Advisor: Jorge Salvador Marques Initiated: 2003 Expected conclusion: 2007 Current Status: On-going Grant: Documents produced in 2005:
E-5) – M.SC THESIS IN PROGRESS (9)
Research Area: Artificial Intelligence Title: Emotion-based Agent Architectures Master Student: Bruno Damas Advisor: Luis Custódio Initiated: 2002 Expected conclusion: January 2006 Current Status: Waiting discussion Documents produced in 2005: Research Area: Artificial Intelligence Title: Agents with Personality: Application to the Robotic Soccer case-study Master Student: Carla Penedo Advisor: Luis Custódio Initiated: 2002 Expected conclusion: 2006 Current Status: On-going Documents produced in 2005: Research Area: Artificial Intelligence Title: Development of Coach Agent for a Robotic Soccer Team Master Student: João Pavão Advisor: Luis Custódio Initiated: 2002 Expected conclusion: 2006 Current Status: On-going Documents produced in 2005: Research Area: Artificial Intelligence Title: Task Planning and Execution for a Multi-robot Team Master Student: Miguel Arroz Advisor: Luis Custódio Initiated: 2003 Expected conclusion: 2006 Current Status: Waiting discussion Documents produced in 2005: Research Area: Artificial Intelligence Title: Cooperative Learning in a Multi-Agent System Master Student: Constança Sousa Advisor: Luis Custódio Initiated: 2004 Expected conclusion: 2006 Current Status: On-going Documents produced in 2005: [14], [15], [16]
Research Area: Multi-Robot Systems

Activity Report – 2005 ISR-Lisbon Associate Laboratory
22 ISR-Lisbon IN+
CREMINER IMAR-Azores
Title: Formation Control of Aerial and Land Vehicles Master Student: Pedro Fazenda Advisor: Pedro Lima Initiated: 2004 Expected conclusion: 2007 Current Status: On-going, finished coursework Documents produced in 2005: Research Area: Cooperative Robotics Title: Yet to be defined Masters Student: João Casaleiro Advisor: Isabel Ribeiro Initiated: Expected conclusion: 2006 Current Status: Ongoing Grant: Documents produced in 2005: Research Area: Petri nets, Discrete Event Systems, Human-Robot Interaction Title: Yet to be defined Masters Student: José Carlos Ribeiro Advisor: João Silva Sequeira Initiated: 2004 Expected conclusion: 2006 Current Status: Ongoing Grant: Documents produced in 2005: Research Area: Real time networks systems Title: Yet to be defined Masters Student: Pedro Manuel Sousa Guimarães Advisor: João Silva Sequeira (Co-advisor) Initiated: 2005 Expected conclusion: 2007 Current Status: Ongoing Grant: Documents produced in 2005:
F) MODELS
G) COMPUTATIONAL APLICATIONS
Hardware and software package for Airborne Line Inspection of Power Lines. The system, installed on a helicopter, features a laser scanner, GPS and video camera, software interfaces for data acquisition and display and a data processing module aiming at detection obstacles in a dangerous vicinity of the power lines. Automatic reports of abnormalities are produced.
H) PILOT INSTALATIONS
I) TESTBEDS AND PROTOTYPES
Commercial patforms (21)
1 - RWI ATRV-Jr mobile robot, 4-wheel drive, equipped with 16 sonars, GPS, inertial navigation module and a compass, pan and tilt vision system and one SICK Laser scanner.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
23 ISR-Lisbon IN+
CREMINER IMAR-Azores
1 - 1.8m Blimp aerial robot, equipped with a minuatire camera, 3 servomotors, RF link for remote control and remote video-link for video transmission.
1 - 4m Blimp aerial robot, with pan and tilt vision system, 3 servomotors, RF link for remote control and remote video-link for video transmission.
4 - Nomadic Super-Scout II mobile robots, equipped with 16 sonars and 2 cameras each, one of them part of an omni-directional catadioptric system.
4 - Scout mobile platforms with on-board computer, vision camera and wireless Ethernet
2 - Scout mobile platforms with on-board computer, vision cameras and wireless Ethernet
1 - Robuter mobile platform, with a ring of 24 ultrasound sensors, and two on-boards processors: Motorola 68020@16MHz running the real-time operating system Albatros, and a Pentium@200Mhz running Windows NT. A laser scanner (Lasernet system) for localisation purposes with artificial landmarks is installed on the platform.
1 - Labmate mobile patform with severalcameras (pan-tilt, omnidirectional and setereo head)
1 - PUMA 560 manipulator, whose Mark III controller was partially replaced by Trident Robotics TRC 004/6 boards, which allow manipulato r control by an external PC.
4 - Sony dogs Aibo.
1 - A complete set of the LEGO Mindstorms system for Mobile Robotics
Designed/built prototypes (11)
1 - Antropomoprphic robotic torso (humanoid), with a 6 DOF arm a 11 DOF (underactuated with 4 motors) articulated hand, and a binocular head with 4 DOFs.
1 - High performance binocular robotic head with 4 degress of freedom
1 - Miniaturized binocular robot head with a 4 degress of freedom and a 3 degrees of freedom neck. The head was designed with the dimensions of a 2.5 year old child.
1 - All-terrain remotely-operated (by wireless or cable LAN) robot (RAPOSA), endowed with several sensors for detection of dangerous gases, humidity, and temperature, a thermal camera, several web cams (some of them with controllable pan)
5 - omni-directional (3 wheels) robots endowed with an on-board laptop with wireless communications, rate-gyro, 16 sonars, omni-directional catadioptric system, optical mouse for odometry, electromechanical kicker and rolling drum systems for robotic soccer applications
1 - Mobile Platform, built at ISR, with tricycle-like kinematics, 60W and 90W motors, open control and guidance architecture based on 2 Pentium motherboards, and 2 on-board cameras.
1 - Unmanned Helicopter for testing of control and navigation algorithms.
Sensors/miscellaneous (6)
3 - Three computer controlled Pan & Tilt Units from Direct Perception.
1 - Several specially designed catadioptric cameras.
1 - Laser Range Finder from the Riegl supplier with range and luminance measurement.
2 - Sick Laser Scanner.
L) INVITED ORAL PRESENTATIONS (PLENARY LECTURES; KEYNOTE LECTURES) (6) José Santos-Victor – “Robotic Vision: Biological Inspiration”, Invited Talk, 20th Annual Meeting of the Federation of the Brazilian Societies of Experimental Biology, Águas de Lindóia, São Paulo, Brasil, August 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
24 ISR-Lisbon IN+
CREMINER IMAR-Azores
José Santos-Victor – “Human Activity Recognition from Video Sequences and the Neurophisiological Foundations for Gesture Recognition and Learning from Imitation”, Invited Talk, CEDI – 1st Spanish Congress on Informatics, Spanish Network of Pattern Recognition and Applications, Granada, Spain, September 2005. Alexandre Bernardino - “Robotic Vision: Applications to Humanoid Robots ”, Invited Talk, X Simposio de Señales, Imagenes y Visión Artificial, Universidad del Valle, Cali, Colombia, September 2005. Pedro Lima – “Research on Multi-Robot Systems at ISR/IST”, Invited talk at LAAS - Laboratoire d’Analyse et d’ Architecture des Systémes, Toulouse, France, September 2005. Alexandre Bernardino - “Visão Robótica @ VisLab-ISR : da Biologia à Engenharia”, invited talk, 1ªs Jornadas de Engenharia Industrial, Instituto Politécnico de Castelo Branco, October 2005. Pedro Lima - “RAPOSA - a Semi-Autonomous Robot for Rescue Operations”, Invited Talk at Rescue Robotics Camp, University of Rome “La Sapienza”, Italy, October 2005.
5 – R&D PROJECTS ACTIVE IN 2005
5.1 COMPUTER VISION
Project name: LTT – LONG TERM TRACKING OF MULTIPLE OBJECTS FOR SURVEILLANCE Project leader within ISR: Prof. Jorge S. Marques (IST/ISR). Project description: This project aims to develop methods for long term tracking of multiple objects in video sequences. Multiple object tracking has received the attention of the image processing community in the last 5 years, fostered by surveillance applications and by Model Based Video Coding (MPEG). The first works addressed short-term tracking and recognition of activities. More recent works have tried to address long term tracking of moving objects. This is a more difficult problem since it involves the ability to disambiguate the trajectories of the objects after they were grouped and occluded for some time. This project aims to address this problem. We wish to detect moving regions in video sequences and to develop algorithms to label each region in a consistent way along the whole video sequence. An additional difficulty concerns the presence of merged regions which can not be identified by a single label. Probabilistic models, namely probabilistic networks, will be adopted to perform this task and to propagate probable labelling scenarios. The tracking algorithms will be applied in the context of urban surveillance. Research Areas: Image Processing, Surveillance. Laboratories: Signal processing Lab. External Partners: Polytechnic Institute of Lisbon. Initiated: 2002. Conclusion: 2005. Classification: POSI/ CPS / 37844 / 2001. Documents produces in 2005: [3,4,5,8,9,11]
------------------- +++ -------------------
Project name: VEMUCARV – SPATIAL VALIDATION OF COMPLEX URBAN GRIDS IN VIRTUAL IMERSIVE ENVIRONMENTS Project leader within ISR: Prof. Alexandre Bernardino (IST/ISR). Project description: The main goals of this project are related to the semi-automatic acquisition and maintenance of 3D virtual reality models of urban areas. It is intended to use registered aerial images and low altitude laser range scans to acquire 3D data of city structure. This data will be processed in order to segment

Activity Report – 2005 ISR-Lisbon Associate Laboratory
25 ISR-Lisbon IN+
CREMINER IMAR-Azores
relevant structures for urban planning (buildings, roads, green areas, etc). Range information provides a very rich description of 3D structure but lack photometric information. Aerial photos provide this information, allowing to pre-segment regions based on color and texture. The main scientific innovation of this project is the combined use of 2D (aerial images) and 3D (range scans) to simplify and improve the building extraction process. Most current approaches use one or the other types of data exclusively. The final result provides a computer model which stands for a mix geometry-image database that can interface to GIS software available (at CML), as well as the generation of real-time walkthrough with thematic information. The results of this project are to be integrated on Lisbon City Hall public computational facilities. Research Areas: Computer Vision, Virtual Reality, Computer Aided Design, Geographical Information Systems. Laboratories: VisLab – Computer Vision Lab. External Partners: IDMEC-IST, CML. Initiated: May 2005. Expected conclusion: June 2008. Classification: POCTI/AUR/48123/2002. Documents Produced in 2005:
5.2 ROBOT NAVIGATION/CONTROL
Project name: OMNISYS - OMNIDIRECTIONAL VISION FOR NAVIGATION AND CONTROL Project leader within ISR: Prof. José Santos-Victor (IST/ISR). Project description: The main objectives of this project are the study of problems related to robot perception and control using catadioptric systems. In particular visual servoing will include the use of uncalibrated images. The catadioptric systems that will be considered are central projection systems. The goals will include the development of mathematical models and coordinate systems that can simplify instances of servoing. The definition of features that can be robustly tracked with this type of images is also a goal of the project as well as the development of algorithms for servoing using partially calibrated or uncalibrated images. To reach this goal a systematic approach will be used. For that purpose a general mathematical model for perspective/catadioptric imaging formation will be established, covering the situations of vision system motion and the relative motions between the mirror and the imaging device that do not violate the central projection constraint. Research Areas: Computer Vision, Mobile Robotics. Laboratories: VisLab – Computer Vision Lab. External Partners: ISR – Coimbra Pole. Initiated: September 2002. Conclusion: August 2005. Classification: Documents Produced in 2005: [7] [13]
------------------- +++ -------------------
Project name: HIGH RESOLUTION OPTICAL SATELLITE SENSORS
Project Leader: Alenia Spazio (Italy).
Project description: The main objective of this project is to develop a High Resolution Optical Satellite Sensor (HROSS) by using the synthetic aperture technique. This technique consists in the reconstruction of the original image of an object starting from that formed on the common focal plane of a set of telescopes (or a multi-aperture telescope) observing simultaneously the object while maintaining constant within a fraction of wavelengths the phase of the

Activity Report – 2005 ISR-Lisbon Associate Laboratory
26 ISR-Lisbon IN+
CREMINER IMAR-Azores
various wavefronts which are combined together (namely, a set of telescopes correctly co-phased, which, in this case, operate like an interferometer). The synthetic aperture technique thus allow to obtain the same resolution of a monolithic-mirror by means of a set of smaller mirrors properly arranged over the surface covered by the monolithic one, with a dramatic reduction of the volume and the mass of the optics.
In this period, ISR contributed with the specification, design and simulation of the overall HROSS control system, based on the available data concerning the GEO instrument overall metrology system specifications, the co-phasing demonstrator (under development by Alenia Spazio) characteristics, including sensors and noise transmission through the bench structure, the noise-to-co-phasing transfer function characteristics for a spacecraft structure similar to the GEO instrument, the performance requirements for the active co-phasing control loop, and the nominal parameters of the actuator mechanisms to be used by the control loop. Simulation results were presented covering the individual OPD pair controllers, providing indications for the parameterization of the corresponding control loop, its sensors and actuators. Two possible strategies for controlling the overall instrument were suggested.
Research Areas: Satellite Formations, Non-linear Control, Interferometry Techniques.
Laboratories: Intelligent Systems Lab.
External Partners: Alenia Spazio (Italy), INETI (Portugal), CSL (Belgium), AMOS (Belgium), MICROMEGA (Belgium).
Initiated: November 2003 Conclusion: December 2005 Classification: EUCLID - RTP 9.09 Documents produced in 2005: [19]
------------------- +++ -------------------
Project name: FORMATION ESTIMATION METHODOLOGIES FOR DISTRIBUTED SPACECRAFT
Project leader within ISR: Prof. Pedro Lima (IST/ISR).
Project description: This project consists of a literature survey followed by the proposal, development and test, in simulation, of an extension of the traditional Guidance, Control and Navigation loop for a single spacecraft to a set of spacecraft flying in formation. This extension creates some novel challenges, since each spacecraft can be considered an obstacle for its team-mates, especially during formation initialisation, relative or absolute information about the formation state can be considered, both state estimation and control can be centralized/distributed or decentralized and do not necessarily need to be tied to the actual topology of the spacecraft formation.
A preliminary study was carried out so as to identify different approaches to the state estimation and control of spacecraft formations, as well as to compare them according to different criteria such as fuel consumption, fuel distribution across the spacecraft, robustness to spacecraft failure, communication link failure, individual sensor failure or temporary occlusions of either communications or sensor reading.
Following that study, ISR/IST developed an integrated approach to GNC of formation flying spacecraft. The Navigation algorithm estimating the full relative state of all the spacecraft is a full-order decentralized filter, based on an Extended Kalman Filter for local measurements, and on Covariance Intersection for the fusion between local state estimates and estimates communicated by other spacecraft, eliminating EKF divergence problems. For Guidance and Control, an algebraic closed-loop algorithm, based on Pontryagin’s maximum principle, is proposed, minimizing the propellant consumption and ensuring collision avoidance. This

Activity Report – 2005 ISR-Lisbon Associate Laboratory
27 ISR-Lisbon IN+
CREMINER IMAR-Azores
algorithm is regularly recomputed. Simulations of the GNC algorithms for a GTO 3-spacecraft formation, supported by a very realistic simulator developed by the partner DEIMOS, were carried out successfully, and an extension of the project was awarded by ESA, where the formation attitude estimation is now being studied.
Research Areas: Satellite Formations, Formation Control, Multi-vehicle State Estimation, Multi-Agent Coordination Architectures.
Laboratories: Intelligent Systems Lab.
External Partners: DEIMOS Engenharia (PO).
Initiated: July 2003. Expected Conclusion: March 2006. Classification: ESA (European Space Agency) 17529/03/NL/LvH/bj. Documents produced in 2005: [11], [17], [20]
5.3 DISTRIBUTED AI
Project name: SocRob – SOCIETY OF ROBOTS OR SOCCER ROBOTS
Project leaders within ISR: Prof. Pedro Lima, Prof. Luis Custódio (IST/ISR).
Project description: This project fosters general research on multi-agent robotic systems, aiming at introducing methodologies for task planning, task allocation and teamwork supervision/coordination, driven by results from Distributed AI, Hybrid Systems and Discrete Event Systems theory. Its current case study is on Soccer Robots, with regular participations in RoboCup.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
28 ISR-Lisbon IN+
CREMINER IMAR-Azores
The FCT project started in 2003, and ended in this period, with two-folded contributions:
• Technological, because the new robots were professionally designed and manufactured, based on the past experience on RoboCup competitions of the leading institution (ISR/IST), as well as on the know-how and competence of the sub-contracted institutions (IdMind and ServoLog).
• Scientific, since some of the most recent research results of the ISocRob team (ISR/IST RoboCup MSL team) have been based on the expected availability of the new omnidirectional robots.
The option to involve Portuguese companies in the development of the robots was also successful, as new robotic prototypes, and relevant know-how were created in Portugal, instead of the simpler (but costly) solution of procuring existing solutions (not fitting the specifications of our design) made abroad. Although the main goal of this proposal was the development of robots specially designed to play soccer, the expected experience gathered from this project can now be re-used by the involved companies to build new commercially robotic solutions for other purposes rather than soccer, with financial and visibility side effects for ISR/IST. Furthermore, the platforms have open hardware and software architectures, and can be used by other groups at ISR/IST for general research on mobile robotics.
The new robots have most of their processing power concentrated on a NEC FS900 laptop, with an INTEL Centrino 1.6 GHz processor, with 512MB RAM and a 30GB disk. The laptop includes a CD-ROM, wireless 802.11b, 3 USB 2.0 ports, and 1 mini-firewire port, as well as a spare Li-Ion battery for extra autonomy.
Each robot is endowed with the following sensors:
• 1 AVT Marlin F-033C firewire camera; • The camera is part of an omnidirectional catadioptric vision sensor, similar to the one used in the
old robots; • 16 sonars (SRF04 RangeFinder) disposed in a ring around the robot; • 1 500 CPR encoder per motor for motor control and odometry; • 1 AnalogDevices rate-gyro XRS300EB to improve orientation determination; • 1 Creative Notebook Optical Mouse (800 dpi resolution and maximum speed of 1m/s) to
improve position determination; • 2 Sharp infrared sensors, to measure the kicker piston displacement and to detect the ball when it
is between the robot fingers.
To power the electronics and motors, 2 packs of 9Ah NiMH batteries per robot are used, with a very good autonomy/weight ratio. IdMind has developed special chargers for these batteries, which allow charging the robots in maximum 3 hours, with the batteries in place, as well as running the batteries from DC current with a cable.
“Plug-and-play" connections of most peripherals to the laptop where decision-making, guidance and navigation algorithms are running were used.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
29 ISR-Lisbon IN+
CREMINER IMAR-Azores
Other contribution in this period focused on developing a dynamic programming algorithm to solve a class of Stochastic Games called two-person zero-sum games, inspired by the reinforcement learning algorithm Minimax-Q. In each state of the game, linear programming is used to find a Nash equilibrium, which ensures optimality in a worst-case scenario. The method is then applied to a behavioral model of a robotic soccer game. The goal is to find the worst case scenario strategy for such a team, so that a lower bound for the team’s performance is guaranteed.
One further tackled topic was a general formulation of relational behaviours for cooperative real robots and an example of its implementation using the pass between soccer robots of the Middle-Sized League of RoboCup. The formulation is based on the Joint Commitment Theory and the pass implementation is supported by past work on soccer robots navigation.
Research Areas: Cooperative Robotics, Sensor Fusion, Multi-Agent Systems, Teamwork, Discrete Event Systems.
Laboratories: Intelligent Systems Lab.
External Partners: IdMind, ServiLog.
Initiated: January 1997, FCT funded project from October 2003. Conclusion: June 2005. Classification: FCT POSI/ROBO/43900/2002. Documents produced in 2005: [4], [6], [8], [10]
------------------- +++ -------------------
Project name: SACOR – SEMI-AUTONOMOUS COOPERATIVE ROBOTS
Project leader within ISR: Prof. João Silva Sequeira (IST/ISR).
Project description: This projects aims at developing a distributed architecture to control multiple robots cooperatively, executing realistic missions with the help of human specialists. Foreseen practical applications include the assistance to the elderly and handicapped and remote surveillance and maintenance.
This project addresses the following topics: (1) synthesis of motion strategies (actions) supported on models of interactions among humans; (2) hybrid representation of the team state, with the discrete part of the state including event information exchanged among robots and specialists, and the continuous part of the state including the actions; (3) properties relevant from the mission execution perspective, namely controllability and stability, in the context of the hybrid systems addressed in topic (2). Topic (1) discusses the influence of uncertainty in the synthesis of each of the robot's actions by selecting classes of controllers that make a differential inclusion (the action) viable in some pre-assigned set (the set bounding the possible trajectories in the robot's C-space). Topic (2) addresses the formal aspects of joining key results on non-smooth systems with those in hybrid systems theory. Topic (3) addresses the effect of negotiation models in team controllability and stability and on the formation of coalitions.
The project has now entered the final stage, with the preparation of a demonstration prototype. The application scenario is that of a robotic surveillance system, scaled down to an indoor laboratory experiment. This application scenario allows the testing of all the components developed along the project and the assessment of the coupling between them. Figure 1 illustrates the conceptual architecture that groups the main objects created within the project.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
30 ISR-Lisbon IN+
CREMINER IMAR-Azores
Figure 1: The SACOR conceptual architecture for the control of a semi-autonomous robot
The objects involved have been developed with the specific purpose of simplifying the interaction of human operators with the robots. The underlying human-robot interaction model is the sign model of semiotics, i.e., the objects in the architecture are mathematically modelled to mimic key characteristics of objects used by humans when interact among themselves such as semantics. These objects in the architecture are tailored to carry semantic content that is typically related to motion. Furthermore, they are used to form a sort of language that can be used by a non skilled human operator to interact with a robot.
The SACOR architecture is currently being tested in a laboratory environment at ISR. Figures 2 and 3 show a snapshots of the laboratory and the robots involved. Nomad Scout and Lego robots are being used. In addition, image agents placed in arbitrary (but fixed) positions in the ceiling of the laboratory provide the robots and human operators with feedback data that can be used both to define a mission and real time control.
Figure 2: The SACOR test environment Figure 3: SACOR robots
The interaction between the human operators and robots is based on the mathematical objects in the control architecture namely the action bounding regions, i.e., regions in the workspace where the trajectory of a robot is constrained to stay in. Figure 4 shows a snapshot of the interface developed.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
31 ISR-Lisbon IN+
CREMINER IMAR-Azores
Figure 4: The SACOR HRI interface
The setup can be used to demonstrate basic robot control strategies in surveillance scenarios. Figure 5 shows a snapshot of a Scout robot moving to intercept an intruder (represented by the bright red box). Basic colour segmentation procedures were used in this experiment.
Figure 5: A Scout robot during the intruder approach phase
Figure 6 shows an example of a trajectory during a mission. The symbols * mark the points where an intruder was detected whereas the o indicate the final position of the robot (at the location of the intruder). Figure 7 shows an example of how the odometry of the robot is reset using the configuration obtained after the image data. The thin lines link the points before and after the odometry resetting. Thick lines correspond to standard odometry based robot navigation.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
32 ISR-Lisbon IN+
CREMINER IMAR-Azores
0 1 2 3 4 5 6 70
2
4
6
8
10
12
14
16SIB_log_full trajectory
y (m
)
x (m)
target 1detected
target 2detected
target 1reached
target 2reached
Figure 6: Example of a trajectory during a
surveillance mission
1 1.5 2 2.5 3 3.5 4 4.5 51
2
3
4
5
6
7
8
9
10
11
x (m)
y (m
)
Odometry reset during wandering
Figure 7: Odometry reset during a surveillance mission
Research Areas: Cooperative Robotics, Semi-Autonomous Robots, Hybrid Systems, Human-Robot Interaction.
Laboratories: Mobile Robotics Lab.
External Partners:
Initiated: September 2002. Expected Conclusion: October 2006. Classification: FCT POSI / SRI / 40999 / 2001. Documents produced in 2005: [4] [5] [10] [11]
5.4 SEARCH AND RESCUE
Project name: RAPOSA – SEMI-AUTONOMOUS ROBOT FOR RESCUE OPERATIONS
Project leader: IdMind, Engenharia de Sistemas, Lda.
Project description: This project consisted of the design, development and test, in realistic scenarios, of a robot for Search and Rescue (SAR) operations, designed to operate in outdoors hazardous environments, such as debris resulting from structure collapses. At this stage, the robot is equipped for search operations only, defined as the tele-operated detection of victims, using specific sensors, whose information is transmitted to the remote operator. The robot is semi-autonomous, i.e., it is tele-operated from a remote station but simultaneously displays the capacity to carry out short tasks autonomously. The robot executes commands sent by a team of SAR experts, located in a safe place. During task execution, the robot relays the information from different sensors to the remote command station, so as to provide the human team with relevant information on its surrounding environment (terrain conditions, temperature, dangerous gases, water or

Activity Report – 2005 ISR-Lisbon Associate Laboratory
33 ISR-Lisbon IN+
CREMINER IMAR-Azores
heat sources, either from human victims or not). The robot has a size designed in order to allow it to negotiate standard sized stairs and sewer pipes. Furthermore, it is a low weight, robust to collisions, dust and water infiltration vehicle.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
34 ISR-Lisbon IN+
CREMINER IMAR-Azores
During untethered operation, RAPOSA uses the onboard batteries and wireless communications to interface the operator. To recover the tether, the operator drives the robot backwards towards the cable, using the visual feedback of the web cam installed in the back side of the robot. After some maneuvering, the robot docks to the innovatively designed cable-end, and the operator latches the tether in using an onboard motorized device. After reaching some relevant location where the operation must be tether-free, the same motorized device latches the tether out by remote command. The cable supplies power and acts as a wireless access point. To the best of our knowledge, this remotely-operated cable docking system is a very useful innovative feature of RAPOSA.
The robot was tested in several scenarios of the Lisbon Fire Fighters School, in March 2005. One of the scenarios consisted of a 40m pipe hidden below a great amount of rubble, which the robot traversed entirely. Another scenario concerned the operation inside a two-floor house. The operator stayed outside and the robot was able to climb and descend stairs twice, as well as to undock and dock the power cable remotely. The robot did also traverse a dark tunnel with a step at the end.
The Lisbon Fire Department is willing to use RAPOSA in real operations. In October 2005, the robot was tested during an earthquake drill, performed at Sicily, Italy, joining several European Civil Protection institutions, at EUROSOT 2006. During the tests, the RAPOSA team and Lisbon firefighters had the opportunity to
handle the operation of the robot in quasi-real scenarios, as well as the logistics involved in its quick transportation from Lisbon to the disaster scenario.
RAPOSA was also selected for participation in ELROB 2006, the 1st European Land-Robot Trial.
Research Areas: Semi-autonomous Robots, Search and Rescue.
Laboratories: Intelligent Systems Lab.
External Partners: Regimento de Sapadores Bombeiros de Lisboa (Lisbon Fire Department), Perceptual Robotics Laboratory of University of South Florida (USA).
Initiated: March 2003. Conclusion: March 2005. Classification: Agência de Inovação – Consortium Projects.
Documents produced in 2005: [18]

Activity Report – 2005 ISR-Lisbon Associate Laboratory
35 ISR-Lisbon IN+
CREMINER IMAR-Azores
------------------- +++ -------------------
Project name: RIOL – ROBOTIC INSPECTION OVER POWER LINES
Project leader within ISR: Prof. João Silva Sequeira (IST/ISR).
Project description: The project aims at developing a prototype robot that uses the infrastructure provided by electric power lines for monitoring/maintenance tasks. Both the power lines and the shield wires provide structured environments for the locomotion of the robot enabling the monitoring of multiple parameters in areas of difficult orography such as in dense forestry.
The primary application for this robot is the inspection/maintenance of the power line infrastructure. Due to the exposure to different weather factors (e.g., sun, rain, wind and snow), materials loose electrical properties causing the disruption in energy distribution. Therefore, it is necessary from time to time, to carry out inspections, aiming at detecting any weakness in such electrical materials that may compromise the energy distribution. These are commonly being done mostly through helicopter based systems. The dangerous nature and the large economical requirements of such operation are pushing forward the development of alternative approaches.
Equally relevant applications of this robot are the monitoring of environmental parameters. The early detection of wild forest fires, environmental pollution and wildlife monitoring are possible with this robot. With multiple robots deployed over selected power lines it is possible to cover a wide area and in some cases to obtain multiple views of the same region.
The project is supported on preliminary studies on the dynamics of a basic serial structure. Using only two rigid links, in the absence of obstacles it is possible to generate a cabbage worm gait. This gait is adequate to the motion and transposition of most of the typical obstacles in the lines. A statically stable variation of the brachiating motion can be used overcome the obstacles present in the lines. Simulation studies (see the bibliography by the project team) show promising results even though some simplifying assumptions in the dynamic modelling.
The project encompasses studies on alternative kinematics, robust control strategies, control architectures and hardware requirements. For the two-link element, the torques required at the actuators tend to be high and hence the payload is severely reduced. Alternative kinematics using parallel structures are foreseen to be useful to reduce the torques needed.
When the lines are in operation the strong electromagnetic field in the neighbourhood of the lines requires special shielding techniques. Though the project primarily focuses on the locomotion aspects of the robot, the requirements on the materials and design of the electronic systems will be addressed.
Simulation of the resulting dynamics models under realistic environment conditions, including motion disturbances induced by atmospheric phenomena, will be used to assess the final characteristics of the prototype prior to production.
Figure 9 shows the basis kinematics scheme. A Lego prototype for this robot, shown in the figure, was successfully tested., demonstrating the basic locomotion principle.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
36 ISR-Lisbon IN+
CREMINER IMAR-Azores
Figure 8: Left: RIOL robot base kinematic structure. Right: Lego prototype for the RIOL robot
Research Areas: Modelling and Control of Robots, Hybrid Systems.
Laboratories: Mobile Robotics Lab.
External Partners:
Initiated: September 2005. Expected Conclusion: September 2008. Classification: FCT POSC / EEA-SRI / 60775 / 2004. Documents produced in 2005:
------------------- +++ -------------------

Activity Report – 2005 ISR-Lisbon Associate Laboratory
37 ISR-Lisbon IN+
CREMINER IMAR-Azores
Project name: ACCURATE MEASUREMENTS OF HIGH VOLTAGE INSTALLATIONS WITH LASER
RANGE SCANNERS AND GPS
Project leader within ISR: Profª Maria Isabel Ribeiro (IST/ISR).
Project description: Preventive detection of obstacle clearance infractions in power lines is important for electrical distribution and critical for transmission system operators. The project developed a prototype system to measure obstacle, in particular tree, clearance of high voltage electrical overhead lines based on laser scanning and performing on-line fault detection and classification.
The system features a video-camera, a GPS-based geo-reference and a low-cost laser scanner with a one-dimension angle sweep, all installed in a land and in aerial vehicle (helicopter). The motion of the vehicle while the laser scans sweeps a three-dimensional volume around the overhead line, generating a cloud of 3D points that represent, the line, the poles and the nearest object to the laser on any scanned direction. Experiments have been carried with four-wheel drive land vehicles and, most often, helicopters.
This solution relies on human-machine interaction for optimal results: the pilot steers the vehicle according to the inspector directions, adjusting speed, attitude and course, depending on the environment along the line track. The line inspector’s role is empowered by accurate measurements and a clearance fault diagnosis system that support his/her assessment and focus the inspection on the critical spots, where he/she can acquire images and describe the scene by speech. The inspector must look for multiple faults along the line and the track. Thus, an optimized interface encompassing video, laser and grid layout is required not to hinder his performance.
The project developed an acquisition interface including laser, video and GPS data, a display interface, an algorithm to identify the line, the line supports and remaining obstacles from raw-data and a procedure to detect abnormal situations (e.g., obstacles closer to the line than a given threshold). Experiments were carried out the sensors on board an all-terrain vehicle and on-board the helicopter that performs the normal inspection operations for REN (National Electric Network).
Power line, support and remaining
obstacles reconstructed from laser raw data acquired from an helicopter.
Real situation.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
38 ISR-Lisbon IN+
CREMINER IMAR-Azores
Research Areas: Monitoring and Surveillance.
Laboratories: Mobile Robotics Lab.
External Partners: LABELEC.
Initiated: March 2005. Conclusion: November 2005. Classification: Documents produced in 2005: [12]
5.5 SURVEILLANCE OF URBAN AREAS
Project name: CAVIAR – CONTEXT AWARE VISION USING IMAGE-BASED ACTIVE RECOGNITION Project leader within ISR: Prof. José Santos–Victor (IST/ISR) Project description: The main objective is to develop the theory of context-aware visual recognition systems. We will implement the theory in a complete closed-loop vision system, and apply it to two applications (city street surveillance and customer behaviour analysis). To achieve these objectives, we will develop new feature grouping, attention and appearance-based recognition processes. This will also require development of new techniques for acquiring, representing and using visual context and situation knowledge. The work developed consisted mainly in two main areas: - The use of Gabor filters for the detection of interest points and for the representation of local image regions for posterior recognition. - Feature selection and classifier design for the recognition of human activities from video.
Research Areas: Computer Vision. Laboratories: Vislab - Computer Vision Lab. External Partners: University of Edimburgh (UK), INRIA (F). Initiated: October 2002. Conclusion: September 2005. Classification: IST-2001-37540. Documents Produced in 2005: [4] [5] [6] [10] [11] [12]
------------------- +++ -------------------

Activity Report – 2005 ISR-Lisbon Associate Laboratory
39 ISR-Lisbon IN+
CREMINER IMAR-Azores
Project name: INTELTRAF – MONITORIZAÇÃO AUTOMÁTICA DO FLUXO DE TRÂNSITO AUTOMÓVEL E DETECÇÃO DE ACIDENTES E AVARIAS EM AUTO-ESTRADAS. Project leader within ISR: Prof. José Santos –Victor (IST/ISR). Project description: This project aims at developing an Automated Traffic Surveillance system with Computer Vision techniques. In a scientific and technological point of view we pretend to develop real-time algorithms for video sequence analysis of traffic scenes and explore innovative extended field of view camera systems (panoramic), with the final goal of price reduction and performance gain with respect to currently existing systems. In particular we address the applications of measuring traffic flow and detecting abnormal events on highways and critical urban areas. Traffic flow monitoring records statistical data on traffic distribution along time (number of vehicles, average velocity, average wait time on queues, etc.). We propose to develop a system that monitors a traffic region, acquires statistical data on traffic density and makes this data available on the Internet. Automatic event detection can help in speeding-up reaction to abnormal events, like accidents and serious transgressions to traffic rules. We propose to develop a system that detects abnormal events on critical traffic points, records the event history and send alarm signals to control stations. Most of the work developed at IST consisted of estimating the highway lanes from the observation of traffic during a period of time. The method is based on a detection module and a tracker. The observed trajectories are input to a cluster algorithm defined in the trajectory space.
Research Areas: Intelligent Transportation Systems, Computer Vision. Laboratories: Vislab - Computer Vision Lab. External Partners: Observit, Tecnologias de Visão por Computador, Lda (P); Brisa, Auto-estradas de Portugal, SA (P); AITEK, SRL (I). Initiated: September 2003. Conclusion: October 2005. Classification: POSI, Medida 1.3. Documents Produced in 2005:
5.6 ROBOTIC ASSISTANT
Project name: ROBOT-CUB - ROBOTIC OPEN-ARCHITECTURE TECHNOLOGY FOR COGNITION, UNDERSTANDING AND BEHAVIOUR Project leaders within ISR: Prof. José Santos–Victor and Prof.Alexandre Bernardino (IST/ISR). Project description: RobotCub is an Integrated Project funded by European Commission through the E5 Unit (Cognition) of Information Society Technologies priority of the Sixth Framework Programme. The consortium is initially composed of 11 European research centers plus two research centers in the USA and three in Japan specialized in robotics, neuroscience, and developmental psychology. The main goals of RobotCub are two: (1) to create an open robotic platform for embodied research that can be taken up and used by the research community at large to further their particular

Activity Report – 2005 ISR-Lisbon Associate Laboratory
40 ISR-Lisbon IN+
CREMINER IMAR-Azores
approach to the development of humanoid-based cognitive systems, and (2) to advance our understanding of several key issues in cognition by exploiting this platform in the investigation of cognitive capabilities. The scientific objective of RobotCub is, therefore, to jointly design the mindware and the hardware of a humanoid platform to be used to investigate human cognition and human-machine interaction. We call this platform CUB or Cognitive Universal Body. It is worth remarking that the results of RobotCub will be fully open and consequently licensed following a General Public (GP) license to the scientific community. The team at IST is responsible for the design of the head of the iCub. The design specifications were based on the characteristics of the oculomotor system of children. This is the most complete robotic head for the given size. It consists of a three degrees of freedom (dof) eye sub-system and a three dof neck. The eyes can verge independently and tilt around a common axis. The neck can perform the pan-tilt-swing movements. The overall weight of the head is about 1.2Kg, motors included. All motors are equipped with encoders and the head possesses an inertial unit (the vestibular system). IST also worked on the design of the robot’s face. The fact that the robot should act in a social environment to elicit communication with other robots and/or people was taken into account. The work on the face design was done in collaboration with the design company Alma Design. The picture below shows the designed robot head.
Research Areas: Computer Vision. Laboratories: Vislab - Computer Vision Lab. External Partners: IST, DIST, U.Genova (I), Arts Lab SSS. Anna (I), AI Lab U. Zurich (CH); Dpt Psychology U. Uppsala (SE); Dept Human Physiology, U. Ferrara (I); U.Hertfordshire (UK); U. Salford (UK); EPFL (CH); Telerobot S.r.l. (I); European Brain Research Institute (I) Initiated: September 2004. Initiated: September 2004. Expected conclusion: August 2009. Classification: IST-2004-004370. Documents Produced in 2005: [3], [14]
------------------- +++ -------------------
Project name: CONTACT - LEARNING AND DEVELOPMENT OF CONTEXTUAL ACTION
Project leaders within ISR: Prof. José Santos-Victor and Prof. Alexandre Bernardino (IST/ISR).
Project description: As infants, each one of us developed the ability to move our muscles to manipulate objects and also to communicate with gestures and speech. Did we learn to perceive and produce gestures for manipulation and speech independently, or are these two learning processes linked? The CONTACT project is an ambitious attempt to investigate the parallel development of manipulatory and speech-related motor

Activity Report – 2005 ISR-Lisbon Associate Laboratory
41 ISR-Lisbon IN+
CREMINER IMAR-Azores
acts from a multi-disciplinary perspective. The project is designed to test the hypothesis that fundamentally similar mechanisms are involved in the development of perception and production for both speech and manipulation. This hypothesis is stimulated by recent evidence suggesting that the human brain interprets motor acts (movements) of other people in essentially the same way, regardless of wether the act generates speech or a manipulative gesture. The work developed so far at IST consisted on sound source localization for the iCub head. For that purpose, the robot head was equipped with two microphones. The binaural sound difference (intensity or phase) is used for localization on the horizontal plane. Instead, for the vertical plane, the proposed method was based on the design of ear shapes similar to some extent to the human ears so that notches at different sound frequencies can be used as cues for the (vertical) localization of the sound.
Research Areas: Computer Vision. Laboratories: Vislab - Computer Vision Lab. External Partners: IST, DIST, U.Genova (I), Dpt Psychology U. Uppsala (SE); Dept Human Physiology, U. Ferrara (I); Dpt Linguistics, U. Stockholm (SE); Initiated: September 2005. Initiated: 2005. Expected conclusion: August 2009. Classification: NEST-5010. Documents produced in 2005:
6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005 Pedro Lima - “Artificial Intelligence”, M.Sc. Course, Post-Graduation on Electrical and Computers Engineering at IST. José Santos-Victor – “Statistical and Computational Models of Vision”, Ph.D. Course, Instituto Superior Técnico, Lisbon, Portugal.
7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS
7.1 – Involvement on the launching of ``Spin-off´´ enterprises

Activity Report – 2005 ISR-Lisbon Associate Laboratory
42 ISR-Lisbon IN+
CREMINER IMAR-Azores
Support to the launching preparation of the Albatroz Engenharia S.A. company (http://www.albatroz-eng.com/), an initiative of a former M.Sc student, João Gomes-Mota, and a former Ph.D student, Alberto Vale, and whose primiraly product is an updated version of an Airborne Line Inspection hardware and software package for aerial laser based inspection of Power Lines jointly developed by ISR/IST and the Portuguese company LABELEC SA.
7.2 – Services contracted and provided to external entities, public and private
7.3 – Organization of activities aiming for diffusion of scientific culture (schools; public in general)
Isabel Ribeiro – “Uma viagem ao mundo dos robots” – invited talk integrated in the cycle Despertar para a Ciência – Beja, Portugal, organized by the Calouste Gulbenkian Foundation, the Portuguese Science and Technology Foundation and Governo Civil de Beja, Moura, Portugal, February 2005. Isabel Ribeiro – “Uma viagem ao mundo dos robots” – invited talk integrated in the cycle Despertar para a Ciência – Covilhã, Portugal, organized by the Calouste Gulbenkian Foundation, the Portuguese Science and Technology Foundation and the University of Beira Interior, Covilhã, March 2005. Pedro Lima – “Equipas de Robots Cooperantes”, ROBÓTICA2005 – Invited Talk to ateliers session, April 2005. Isabel Ribeiro – “Uma viagem ao mundo dos robots” – invited talk integrated in the cycle Despertar para a Ciência – Coimbra, Portugal, organized by the Calouste Gulbenkian Foundation, the Portuguese Science and Technology Foundation and the Institute of Interdisciplinary Research from University of Coimbra, Coimbra, Portugal, April 2005. Pedro Lima – “Futebol Robótico - Porta para o Mundo da Ciência, Tecnologia e Inovação”, Semana Informática do IST, Lisbon, Portugal, March 2005. Pedro Lima – “Robótica – Realidade e Ficção”, 23º Encontro Juvenil de Ciência, organized by Associação Juvenil de Ciência, Lisbon, Portugal, September 2005. Isabel Ribeiro – “Uma viagem ao mundo dos robots” – invited talk integrated in the cycle Despertar para a Ciência – Vila Real, Portugal, organized by the Calouste Gulbenkian Foundation, the Portuguese Science and Technology Foundation and University of Trás-os-Montes e Alto Douro, Vila Real, Portugal, September 2005. Isabel Ribeiro – “Uma viagem ao mundo dos robots” – invited talk integrated in the cycle Despertar para a Ciência – Bragança, Portugal, organized by the Calouste Gulbenkian Foundation, the Portuguese Science and Technology Foundation and Escola Superior de Tecnologia e Gestão from Instituto Politécnico de Bragança, Bragança, Portugal, October 2005. Pedro Lima – “Introdução à Robótica” – Cultural Nights at Students Residence Montes Claros, Lisbon, Portugal, November 2005. Short course for high-school students during holidays
Title: “Construction of a Soccer Robot” Program: Scientific Activities for Young Students on Holidays 2005 Date: 18-22 July 2005. Coordinator: Pedro Lima Laboratories: Intelligent Systems Laboratory Support: National Agency for the Scientifc and Technological Culture – Ciência Viva Description: This was a workshop for High School students aiming at motivating them for the learning of Science and Technology, namely Robotics. The students had to build from an initial kit a

Activity Report – 2005 ISR-Lisbon Associate Laboratory
43 ISR-Lisbon IN+
CREMINER IMAR-Azores
team of two robots capable of playing football according to the rules of RoboCup Junior. In the process, they learned from several disciplines such as math, electronics, programming and mechanics, among others. In the end, the available teams played in a round-robin tournament. The workshop had the participation of 31 students from 25 schools, selected out of 44 candidates. URL: http://lci.isr.ist.utl.pt/projects/educational/cvnasferias/index2005.html

Activity Report – 2005 ISR-Lisbon Associate Laboratory
44 ISR-Lisbon IN+
CREMINER IMAR-Azores
Thematic Area C: Sustainable Technologies and Environmental Systems
Activity Report 2005
1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005
During 2005 activities were developed at different levels, as follows:
1. Studies aiming the development of more efficient systems of combustion were developed, considering aspects related to energy consumption, pollutant emissions or even noise.
2. Modeling of hybrid propulsion systems was developed, aiming to attain optimal systems for the operation of fleets with minimal environment impact and minimal energy consumption.
3. Analyzing the economy metabolism along the last decades, which corresponded to a period of continuous material consumption. The empirical analysis was based on the study of the evolution of the Portuguese economy that during the last two decades of the twentieth century can be associated to a transitional economy.
4. Characterizing the environmental impacts of different products and services, and deriving its policy implications.
5. Understanding of the controlling mechanisms of carbon cycling in European ecosystems, and the impact of climate change and variability, and changing land management on the European carbon balance. Our main goal is to understand the controlling processes and mechanisms of carbon cycling in European ecosystems and how these are affected by climate change and variability and human management. In the area of forest fires, models for national fuel characterization have been developed, having in mind to contribute for the modeling processes of forest fire propagation.
6. Diversified activities were conducted with implications in the contribution to economic growth of scientific and technological knowledge and innovation.
2 – HUMAN RESOURCES IN 2005 PhD researchers (staff) - 9 PhD researchers (Post-Doctoral fellows) –12 (from which 4 foreign) PhD students - 15 (from which 1 foreign) MSc students – 22 Engineers – 18 Technicians - 6
3 – INDICATORS IN 2005
A - Publications Books (author) 3 Books (editor) 0 Books (chapters in books) 3 Papers in international journals 17 Papers in national journals 1
B - Comunications In international conferences 18 In national conferences 13
C- Reports 5
D – Organization of Seminars and Conferences

Activity Report – 2005 ISR-Lisbon Associate Laboratory
45 ISR-Lisbon IN+
CREMINER IMAR-Azores
International Events 8 Seminars and internal workshops 6
E – Advanced Training Ph.D Thesis (concluded) 2 M.Sc Thesis (concluded) 14 Others Ph.D Thesis (in progress) 15 M.Sc Thesis (in progress) 5
F - Models
G – Software Applications
H - Pilot Instalations
I - Laboratory Prototypes
J - Patents
K - Awards 1
L – Invited Oral Presentations
4 – DESCRIPTION OF INDICATORS IN 2005
A - 1) BOOKS (author) (3) P. Conceição, M. V. Heitor, (2005), Innovation for All? Learning from the Portuguese path to technical change and the dynamics of innovation. Westport and London: Praeger. Paulo Ferrão, Paulo Ribeiro e Paulo Silva (2005) A ecologia industrial e a embalagem de produtos alimentares em Portugal. Celta Editores (441 páginas, 600 exemplares). ISBN: 972-774-213-0 M. S. Pereira, M. Heitor, H. Horta, A. Piedade e Rui Santos (2005), A produção e difusão de conhecimento na Universidade Técnica de Lisboa: 1995/96-2002/03, Lisboa, Universidade Técnica de Lisboa, 2 vols
A-3) CHAPTERS IN BOOKS (3) J. Moutinho and M. Heitor (2005), “Building Human Centered Systems Based on Communication Infrastructures: Evidence from Portugal”, in Marshall, S., Taylor, W. and Yu, X., (eds.), “The Encyclopedia of Developing Regional Communities with ICT”, Hershey, Idea Group P. Conceição, M.V. Heitor, and H. Horta (2005), " R&D funding in US universities: from public to private support or public policies strengthening diversification?" em Enders, J., and Jongbloed, B., (Eds) Public-Private Dynamics in Higher Education: Expectations, Developments and Outcomes, (CHEPS, University of Twente) Baptista, R., Stel, A.J. van, Thurik, A.R. “Entrepreneurship, Industrial Re-structuring and Unemployment in Portugal,” Forthcoming in Entrepreneurship, Growth, and Innovation: the Dynamics of Firms and Industries. International Studies in Entrepreneurship, Enrico Santarelli (ed.), Springer Verlag, 2005
A -4) IN INTERNATIONAL JOURNALS (PUBLISHED) (17)
S.I. Shtork, O. Comas, E.C. Fernandes, and M.V. Heitor (2005) “Aerodynamic structure of unsteady swirling flow downstream of a sudden expansion”. Thermophysics and Aeromechanics, Vol. 12, No. 2, pp. 217-228

Activity Report – 2005 ISR-Lisbon Associate Laboratory
46 ISR-Lisbon IN+
CREMINER IMAR-Azores
S. I. Shtork, C.E. Cala, E.C. Fernandes, and M.V. Heitor (2005) “Coherent Helical Structures in Swirl Flows. Technical Physics Letters”, Vol. 31, Issue 8, pp. 660-662
P. Conceição, M. V. Heitor, P. Vieira (2005, forthcoming), “Are Environmental Concerns Drivers of Innovation? Speculating form the Community Innovation Survey for Portugal”, Technological Forecasting and Social Change
C.E. Cala, E.C. Fernandes, M.V. Heitor and S.I. Shtork (2005), “Coherent structures in unsteady swirling jet flow”. Experiments in Fluids
E.C. Fernandes, M.V. Heitor M.V. and S.I. Shtork (2005), “An analysis of unsteady highly turbulent swirling flow in a model vortex combustor”. Experiments in Fluids.
G.P.J. Dijkema, P. Ferrão, P.M. Herder and M. Heitor (2005) “Trends and opportunities framing innovation for sustainability in the learning society”. Technological Forecasting and Social Change, 73, pp. 215-227.
P. Ferrão and J. Amaral (2005) “Assessing the economics of auto recycling activities in relation to European Union Directive on End of Life Vehicles”. Technological Forecasting and Social Change, 73, pp. 277-289.
S. Niza and P. Ferrão (2005) “A transitional economy´s metabolism: The case of Portugal”. Resources, Conservation and Recycling, 46, pp.265-280.
J. Amaral and P. Ferrão (2005) “Design for recycling in the auto industry: new approaches and new tools”. Journal of Engineering Design, 17-3, June 2006.
M. R. O. Panão and A. L. N. Moreira, “Thermo-and fluid dynamic characterization of spray cooling with pulsed sprays”, Experimental Thermal and Fluid Science, Volume 30, Issue 2, 79 – 96, 2005.
M. R. Panão and A. L. N. Moreira, “Flow characteristics of spray impingement in PFI injection systems”, Experiments in Fluids, Vol. 39, No 2, pp. 364 – 374, 2005.
M. R. O. Panão and A. L. N. Moreira, “Experimental characterization of intermittent gasoline sprays impinging under cross flow conditions”, Atomization and Sprays, vol. 15, pp. 201 – 222, 2005
Rodrigues, A. M., Pita, G. P and Mateus J. , 2005 “Turbulent fluxes of carbon dioxide and water vapour over an eucalyptus forest in Portugal”, Silva Lusitana, 13(2), pp. 169-180, Estação Florestal Nacional;
Manfredi, Cristiane; Pimenta, Amílcar; Carvalho, João Andrade de; Pires, Armando Caldeira; Ferreira, MarcoCH and C2 radicals caractherization in natural gas turbulent diffusion flames. Journal of the Brazilian Society of mechanical Engineering, vol. XXVII, nº 2, 2005
Lourenço, Rosane; Pires, Armando Caldeira. Air-Transportation planning: Multicriteria analysis in the definition of sustainable development indicators. Jounal of Air Transportation Brazilian Association, São Paulo, Brasil, 2005
Albuquerque, Cláudio; Pires, Armando Caldeira. Brazilian’s Aeolian Electricity: Life cycle assessment and free market. International Journal Energy Technology and Policy, Suiça, 2005
Baptista, R., Thurik, A.R. "The Relationship between Entrepreneurship and Employment: is Portugal an Outlier?" Forthcoming in Technological Forecasting and Social Change, 2005
A -4) IN INTERNATIONAL JOURNALS (ACCEPTED AND/OR SUBMITTED) (14)
1. P. Ferrão, P. Nazareth and J. Amaral (2005) “Strategies for meeting EU end-of-life vehicles re-use/recovery targets”. Paper accepted for publication in the Journal of Industrial Ecology.
2. P. Ferrão and J. Nhambiu (2005) “The use of EIO-LCA in assessing national environmental

Activity Report – 2005 ISR-Lisbon Associate Laboratory
47 ISR-Lisbon IN+
CREMINER IMAR-Azores
polices under the Kyoto protocol: the Portuguese economy”. Paper accepted for publication in the journal: Int. J. of Technology, Policy and Management.
3. Conceição, P., Ferreira, P. and Preto, M.T. "Understanding the relationship between inequality
and economic growth: Testing the augmented Kuznets hypothesis" –submitted to the "European Economic Review", 2005
4. Fernandes E.C., Leandro R.E. The visualization, mapping and acoustics of laminar premixed
impinging flames. 2005, submitted in Combustion and Flames.
5. Lienemann H., Shrimpton J., Fernandes E. (2005) The aerodynamic instability of attenuating sheets applied to swirl atomizer technology. Submitted in Experiments in Fluids.
6. Shtork S.I., Vieira N.F., Fernandes E.C. (2005) On the identification of helical instabilities in a
reacting swirling flow. Submitted in Fuel.
7. Shtork S.I., Cala C.E., Fernandes E.C. (2005) Experimental characterization of rotating flowfield in a model vortex burner. Submitted in Experimental Thermal and Fluid Science.
8. J. Amaral, P. Ferrão and C. Rosas (2005) “Is recycling technology innovation a major driver for technology shift in the automobile industry under an EU context?”. Paper accepted for publication in the journal: Int. J. of Technology, Policy and Management.
9. Baptista, R., Escária, V., Madruga, p. “Entrepreneurship, Regional Development and Job
Creation: the Case of Portugal.” Forthcoming in Small Business Economics, 2005.
10. Mateus J., Pita, G.P. and Rodrigues, A.M. 2005. Seasonal evolution of Evapotranspiration (regime) and carbon assimilation over a Eucalyptus Globulus plantation. Accepted for publication in Silva Lusitana
11. Xavier, José; Martins Filho, José; Pires, Armando Caldeira. Life cycle assessment and
optimization of a brazilian family farm production system. Progress in Industrial Ecology an International Journal, submetido em 2005
12. P. Ferrão, P. Nazareth and J. Amaral (2005) “Strategies for meeting EU end-of-life vehicles re-use/recovery targets”. Paper accepted for publication in the Journal of Industrial Ecology.
13. P. Ferrão and J. Nhambiu (2005) “The use of EIO-LCA in assessing national environmental polices under the Kyoto protocol: the Portuguese economy”. Paper accepted for publication in the journal: Int. J. of Technology, Policy and Management.
14. J. Amaral, P. Ferrão and C. Rosas (2005) “Is recycling technology innovation a major driver for technology shift in the automobile industry under an EU context?”. Paper accepted for publication in the journal: Int. J. of Technology, Policy and Management
A-5) IN NATIONAL JOURNALS (1)
1. M. V. Heitor (2005). “Prioridade à Inovação”. Cadernos de Economia, 72, (Jul./Set. 2005), pp. 9-16 2. Xavier, José Humberto Valadares; Pires, Armando Caldeira; Zoby, José Luiz; Gastal, Marcelo
Leite; Silva, Marias Anis da; Ribeiro, Carlos Frederico; Rocha, Francisco. Caractezização dos impactos ambientais na agricultura: Análise do ciclo de vida (ACV) de sistemas de produção da agricultura familiar em Unaí-MG. Cadernos de Ciência e Tecnologia , Aceite para publicação, 2005

Activity Report – 2005 ISR-Lisbon Associate Laboratory
48 ISR-Lisbon IN+
CREMINER IMAR-Azores
B-1) IN INTERNATIONAL CONFERENCES (18)
1. Rodrigues, M.J., Ferrão, P. “The Potential for GHG Emissions Reduction Of Building-Integrated Photovoltaics – A Life Cycle Assessment Approach”, Engineering Sustainability Conference, Pittsburgh, PA, EUA, Abril 2005.
2. Ferrão, P. “An industrial ecology perspective on the use of fuel cells to promote sustainable energy use in big cities “, 8th SAC Seminar on “Bio-Fuels in Clean Power Production & Transport, ISTC-International Science and Technology Center, Moscow, November 29th & 30th, 2005.
3. Ferrão, P. “Bioethanol as an alternative fuel in Southern Europe: Policy and Environmental implications“, Basics in EcoDesign, advice to organise SME workshops, Fraunhofer IZM, Berlin, 2nd & 3rd March, 2005
4. Amaral, A.M. (2005) - "Fostering Innovation through High-Technology Entrepreneurship: The Role of Individual Entrepreneurs in Portugal". Globelics Academy 2005, 2nd PhD School on Innovation and Economic Development, May 23 to June 3, Lisbon-Portugal
5. Faria, P. (2005) - "Innovation in Portugal: what can learn from the CIS III survey?" 2005 – Globelics Academy 2005 - 2nd PhD School on Innovation and Economic Development, May 23 to June 3 – Lisbon.
6. Preto, M.T. (2005) - "Technology diffusion and income inequality: how augmented Kuznets
hypothesis could explain ICT diffusion?" 2005 – Globelics Academy 2005 - 2nd PhD School on Innovation and Economic Development, May 23 to June 3 – Lisbon
7. Fernandes E.C., Heitor M.V., Shtork S.I., Vieira N.F. Helical structures identification in a
swirl-stabilized lean-premixed combustor. Proc. 5th International Seminar on Flame Structure, 11-14 July, 2005, Novosibirsk, Russia.
8. Shtork S.I., Cala C.E., Fernandes E.C., Heitor M.V. Study of unsteady swirling flow in a model
vortex burner. Proc. 8th International Conference on Optical Methods of Flow Investigation, 28th June - 1th July 2005 Moscow, Russia.
9. Silva J.M., Duarte A.C., Fernandes E.C. PIV measurements in water-pump intakes. Proc. XXXI
IAHR Congress, 11-16 September, 2005, Seul, Korea
10. A. S. Moita and A. L. Moreira, “The interaction of Fuel Droplets with heated interposed susrfaces in IC Engines”, SAE Technical Paper 2005-24-084, 7th International Conference on Engines for Automobile, ICE 2005, Capri, Italy, September, 11 – 16, 2005.
11. A. L. N. Moreira, J. Carvalho and M. R. Panão, “The effects of fuel impact on mixture preparation in
SI engines with port fuel injection”, SAE Technical Paper 2005-24-083, 7th International Conference on Engines for Automobile, ICE 2005, Capri, Italy, September, 11 – 16, 2005.
12. A. S. Moita and A. L. Moreira, “The combined effects of surface topography and heat transfer on
droplet/wall interaction mechanisms”, 20th Annual Conference on Liquid Atomization and Spray Systems, Orléans, France, 5th - 7th September 2005.
13. M. R. Panão and A. L. Moreira, “The thermal interaction of pulsed sprays with hot surfaces –
application to Port-Fuel Gasoline Injection systems”, 20th Annual Conference on Liquid Atomization and Spray Systems, Orléans, France, 5th - 7th September 2005
14. Rui Santos e José V. Serrão, Institutional arrangements and functions of tenancy and emphyteusis in
Southern Portugal in the late 18th century, no Colloque Droits de propriété, marché de la terre et croissance économique en Europe, 13ème-19ème siècle (Thonon 12-14 de Outubro)
15. Rodrigues, A.M., Pita, G.A.P. and Mateus J., “Carbon Dioxide and Water Vapor Atmospheric
Fluxes over an Eucalyptus Forest in Portugal”, IUFRO-Edinburgh Conference 5-8 Abril, 2005, Reino Unido.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
49 ISR-Lisbon IN+
CREMINER IMAR-Azores
16. Ventura, J., I. Cabrita Neves e J. Valente, “A protecção contra incêndio do património cultural”, Actas
do Colóquio Internacional sobre Segurança e Higiene Ocupacionais – SHO 2005, FEUP,Fevereiro de 2005.
17. S.Faias, J. Esteves, P. Ferrão (2005) Vehicle Drivetrain Customization – Application to a Postal Service Fleet, EPE 2005 – European Conference on Power Electronics and Applications, Dresden, September 2005.
18. S.Faias, J. Esteves, P. Ferrão (2005) Vehicle Drivetrain Customization for Transportation Fleets, 21st
Worldwide Battery, Hybrid and fuel Cell Electric Vehicle Symposium and Exhibition, Monaco, April 2005.
B-2) IN NATIONAL CONFERENCES (13)
1. Rodrigues, M.J., Ferrão, P. “The Potential for GHG Emissions Reduction Of Building-Integrated Photovoltaics” ENER05, Figueira da Foz, Portugal, Maio 2005.
2. Ferrão, P. “Introdução às Estratégias de EcoDesign – Porquê, o quê e como? “, Benefícios
Empresariais através do Ecodesign, Instituto Superior Técnico, Lisboa, Portugal, Maio de 2005
3. Amaral, A.M. - "Understanding the implementation of mobile technologies within the firm". “Auditório da TMN", Lisbon –Portugal, February 2005
4. Amaral, A.M. - "Entrepreneurship and Innovation in Lisbon", Centro de Informação Urbana de
Lisboa, Picoas Plaza, Lisbon-Portugal, June 2005
5. Mendonça, J., Seminário “Determinantes da Inovação na Indústria Química em Portugal”, integrado no ciclo de seminários do Departamento de Engenharia Química do IST, February 2005
6. Fernandes E.C., Shtork S.I., Vieira N.F. Acoustic diagnostics of unsteady reacting flow in a swirl
stabilized lean-premixed combustor. Proc. 12th International Congress on Sound and Vibration. 11-14 July, 2005, Lisbon, Portugal.
7. Fernandes E.C. The design of sound probes. Proc. 12th International Congress on Sound and
Vibration. 11-14 July, 2005, Lisbon, Portugal. 8. Rui Santos e Hermínia Vilar, “Property rights and agrarian contracts in Southern Portugal, 14th-
20th centuries, no painel Property rights and agrarian contracts” da XXV Conferência da APHES (Évora, 18 de Novembro)
9. S.Cerasoli, E.Breia, J.Mateus, G.Pita, M.Chaves, J.Santos Pereira, "Eficiência de Uso da Água e
Discriminação para o �13C em Folhas de Eucalyptus Globulus", IX Congresso Luso-Español de Fisiologia Vegetal, 18-21 Setembro 2005, Évora
10. A.P. Correia, J.S.Pereira, G.Pita , M.Carneiro, C.Nogueira, J.Silva, A.Rodrigues, A.Fabião,
M.Madeira e J.Banza , "Balanço de Carbono no Eucaliptal: Comparação entre o Fluxo turbulento de CO2 e a estimativa do modelo CO2Fix V3.1" , 5º Congresso Florestal Nacional, 2005, Viseu
11. Ventura, J., I. Cabrita Neves e J. Valente, “Avaliação do Risco de Incêndio do Edifício Grandela na
Situação Imediatamente Anterior ao Incêndio do Chiado”, Actas do 1º Encontro Nacional de Riscos, Segurança e Fiabilidade, IST, 11-13 de Maio de 2005.
12. Valente, J.C., I. Cabrita Neves e J. Ventura, “Incêndios que Afectaram o Património Cultural Europeu
nas Últimas Décadas”, Actas do 1º Encontro Nacional de Riscos, Segurança e Fiabilidade, IST, 11-13 de Maio de 2005.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
50 ISR-Lisbon IN+
CREMINER IMAR-Azores
13. Neves, I. Cabrita, J. Ventura e J. Valente, “de Segurança contra Incêndio do Património Cultural: um
Método para a Quantificação da sua Eficácia e Identificação de Prioridades”, Actas do 1º Encontro Nacional de Riscos, Segurança e Fiabilidade, IST, 11-13 de Maio de 2005.
C-1) TECHNICAL REPORTS (5)
1. Amaral, a.m., Arantes-Oliveira, N. (2005) - Science-Based and Knowledge-Intensive Entrepreneurship: A Multiple-Case Studies Approach on Selected Portuguese Start-ups. International Collaborative project coordinated by Centro Inter-universitario de Desarrollo, CINDA
2. Amaral, A.M. et al (2005) Collaborative Project with the Lisbon Municipality (CML) in order to
study knowledge-based entrepreneurial activities and urban development: “ Lisboa: Cidade de Empreendedores – Valorização de Conhecimento e Inovação em Lisboa” forthcoming in CML, Colecção de Estudos Urbanos, Lisboa XXI
3. Amaral, A.M., Baptista, R., Faria, P., Karaöz, M. Mendonça, J., Preto, M.T. (2005) Participação no
Relatório: Preparar Portugal para um Novo Ciclo de Fundos Estruturais 2007 – 2013: Inovação, Empreendedorismo e Desenvolvimento: o que podemos aprender da investigação para a formação de politicas públicas nas áreas da Ciência, Inovação, Crescimento Económico e Desenvolvimento Sustentável... um estudo a apresentar ao Observatório do QCA III – Capítulo 3: “Inovação, Crescimento Económico e Emprego: o Desafio do Empreendedorismo”; Capítulo 4: “Inovação e Produtividade”
4. Edgar C. Fernandes, Robert E. Leandro, “FLEXHEAT, FLEXIBLE PREMIXED BURNERS FOR
LOW-COST DOMESTIC HEATING SYSTEMS”, 12th month report.
5. Edgar C. Fernandes, Nuno Rolo, Ilídio Guerreiro, “Advanced experimental analysis of auto ignition”, Project nº ENK6-CT-2003-00643: Improving Engine Performance and Efficiency by Minimisation of Knock Probability.
D-1) – ORGANIZATION OF INTERNATIONAL EVENTS (8) Name: Conferências Internacionais sobre “Technology Policy and Innovation”, 8th Conference; Lodz, Poland; 06-08 July, 2005 Description: The 8th Conference, in 2005 in Lodz look after on initiatives to enhance the knowledge on the main fields concerning the governance of research systems, namely regarding the response to societal needs, the multidisciplinarity of scientific research and the interactions between institutions involved in the funding and performance of research activities supported by public funds. Coordinators: Prof. Manuel Heitor Support: Name: “Globelics – the global network for the economics of learning, innovation, and competence building systems”, d Conference: Pretoria, South Africa, 31 October – 4 November 2005 Description: The Global Network for Economics of Learning, Innovation, and Competence Building Systems (Globelics) is a global network of scholars who apply the concept of 'Learning, Innovation, and Competence Building System' (Lics) as their analytical framework. The network is especially dedicated to the strengthening of Lics in countries in the South. Coordinators: Prof. Manuel Heitor Support:

Activity Report – 2005 ISR-Lisbon Associate Laboratory
51 ISR-Lisbon IN+
CREMINER IMAR-Azores
Name: Conferências Internacionais “IRGC – International Risk Governance Council”, 2nd Conference: Beijing, 20-21 September 2005 Description: Coordinators: Prof. Manuel Heitor Support: Name: Basics in EcoDesign, advice to organise SME workshops Description: Coordinators: Franhaufer Support: Name: “Firm Level Innovation and the CIS - Is there a Common Story across EU Countries?” Description: This seminar was a collaborative effort to bring together senior and junior researchers as well as PhD and Master students in order to foster discussion concerning CIS data and analysis relating to innovation in European firms Coordinators: Prof. Rui Baptista Support: FCT Name: Globelics Academy - PhD School on National Systems of Innovation and Economic Develpoment Description: Coordinators: Prof. Rui Baptista Support: Fundação para a Ciência e a Tecnologia, Fundação Calouste Gulbenkian, Universidade Técnica de Lisboa e Fundação Luso-Americana Name: “Entrepreneurship, Innovation and the Development of Regions” Description: This workshop presented work done by European researchers on the regional dynamics of technological innovation and new firm formation, looking at their effects on employment and business development, and drawing conclusions with regard to policy implications. Coordinators: Prof. Rui Baptista Support: INTELI
Name: “Science and Technology Based Entrepreneurship and Economic Development” Description: Coordinators: Prof. Rui Baptista Support:
D-2) – ORGANIZATION OF SEMINARS AND INTERNAL WORKSHOPS (6) Name: Innovate with design - New processes for new designs , 14th March 2005 Coordinators: Prof. Manuel Heitor Name: ENGINEERING DESIGN: what can we learn from designing concept cars, 15th March 2005 Coordinators: Prof. Manuel Heitor Name: Photovoltaics in Buildings: Opportunities for New Building Ventures, 16th March 2005 Description: The workshop is aimed at all key players involved in the construction sector, from architects to real estate promoters, from municipalities to engineering services providers. The main objective is to discuss how photovoltaic technology can be promoted in urban environments, in particular through its integration in buildings (BiPV – Building-Integrated Photovoltaics). Name: Entrepreneurship, Innovation and the Development of Regions, 20th April 2005 Name: Science and Technology Based Entrepreneurship and Economic Development, 8th June 2005 Name: Benefícios Empresariais através do Ecodesign Coordinators: Prof. Paulo Ferrão

Activity Report – 2005 ISR-Lisbon Associate Laboratory
52 ISR-Lisbon IN+
CREMINER IMAR-Azores
E-1) – Ph.D THESIS (concluded) (2)
José Amaral, “ Ecodesign: o caso de estudo do automóvel” Ph.D Thesis, Instituto Superior Técnico, Lisbon, October 2005. Pedro Horta, “ Concepção e modelação numérica de secador solar passivo para tratamento de efluente de processo de dessalinização”, Ph.D Thesis, Instituto Superior Técnico, December 2005.
E-2) – M. Sc THESIS (concluded) (14) Teresa Costa , “Análise do Impacto do IDE na Economia Portuguesa: Aplicação da Técnica Input/Output ao Caso de estudo Autoeuropa”, Instituto Superior Técnico, May 2005. Inês dos Santos Costa, “O ambiente como factor de inovação em Portugal: o sector do calçado”, Instituto Superior Técnico, December 2005. Eduardo Santos, “Integration of Environmental Issues in Electrical and Electronic Product Design and Development: Environmental Improvement through Applied Ecodesign Strategies in the Context of Portugal”, Instituto Superior Técnico, October 2005. Leonardo Rosado, “Learning From Public Use Bicycle Case Studies To Identify Main Design Guidelines For A Municipal Sustainable Mobility Programme”, Instituto Superior Técnico, October 2005. Gonçalo Crespo, “Desenvolvimento de uma Bicicleta Assistida Electricamente”, Instituto Superior Técnico, October 2005. Rui Teixeira, “ Procuction of Reinforced Composites With Natural Fibers For Automotive Applications”, Instituto Superior Técnico, October 2005. Anastácia Deusdará Rodrigues, 2005, “Knowledge Management: the Case of the MIPIS Project”, (IST; supervision: Manuel V. Heitor, IST, DEM, Miriam M. Pinto, Arlindo Filho) João Paulo Fonseca da Silva, 2005, “Politicas de Telecomunicações: gestão de banda larga - o caso de Lisboa”, (IST; supervision: José Figueiredo – IST, DEG; Rui Santos – FSCH/UNL) José Luís Moutinho Neto, 2005, “Digital Cities and the challenges for a Knowledge-Based View of the Territory: evidence from Portugal”, (IST; supervision: Manuel V. Heitor, IST, DEM, Rui Santos, UNL, FSCH). Marco Ricardo Bravo da Silva, 2005, “Estratégias de Inovação empresarial e Gestão de Tecnologia, Processos de Reengenharia e Gestão de Conhecimento - o caso da CONTINENTAL em comparação internacional”, (IST; supervision: Manuel V. Heitor, IST, DEM; Francisco Veloso, CMU, DEPP) Patrick Montgomery, 2005, “A Study into Next Generation Networks for Voice Services: History, Design and Policy Implications”, (IST; supervision: Manuel V. Heitor, IST, DEM; Pedro Ferreira). Teresa Costa, 2005, “Análise do Impacto do IDE na Economia Portuguesa: Aplicação da Técnica Input/Output ao Caso de estudo Autoeuropa”, (IST; supervision: Paulo Ferrão – IST, DEM) Alexandre C. Duarte, 2005, “Experimental and numerical analysis of water-pump intakes” IST, Supervision: Prof. E.C. Fernandes; Co-Coordination: Profs. J.M. Silva and L.R.C. Eça. Nuno R. Creado, 2005, “Experimental characterization of flame-wall interaction”, IST, Supervision: Prof. E.C. Fernandes

Activity Report – 2005 ISR-Lisbon Associate Laboratory
53 ISR-Lisbon IN+
CREMINER IMAR-Azores
E-4) – Ph.D THESIS IN PROGRESS (15)
Research Area: Engenharia Mecânica Title: Building integrated photovoltaics (BiPV) technology diffusion into Portuguese urban areas. Doctoral Student: Maria João Rodrigues Advisor: Prof. Manuel Heitor Initiated: Expected conclusion: 2007 Current Status: On-going Grant: FCT
Research Area: Engenharia Mecânica Title: Indicadores do desempenho térmico de edificações urbanas: análise da morfologia urbana e de condições microclimáticas Doctoral Student: Marta Panão Advisor: Prof. Paulo Ferrão Initiated: Expected conclusion: 2007 Current Status: On-going Grant: FCT
Research Area: Engenharia Mecânica Title: Análise de desempenho energético e ambiental de edifícios Doctoral Student: Armando Pinto Advisor: Prof. Paulo Ferrão Initiated: Expected conclusion: 2007 Current Status: On-going Grant:
Research Area: Engenharia do Ambiente Title: O metabolismo da economia: análise da economia Doctoral Student: Samuel Niza Advisor: Prof. Paulo Ferrão Initiated: Expected conclusion: 2006 Current Status: On-going Grant:
Research Area: Engenharia do Ambiente Title: Gestão de resíduos em Portugal: modelo de simulação da interacção entre desenvolvimento económico e infraestruturas de processamento de resíduos Doctoral Student: Paulo Ribeiro Advisor: Prof. Paulo Ferrão Initiated: Current Status: On-going Grant: FCT Expected conclusion: 2006
Research Area: Engenharia do Ambiente Title: O ambiente como estímulo à inovação tecnológica: análise do sector automóvel Doctoral Student: Aldina Soares Advisor: Prof. Pedro Conceição Initiated: Expected conclusion: 2006 Current Status: On-going Grant:

Activity Report – 2005 ISR-Lisbon Associate Laboratory
54 ISR-Lisbon IN+
CREMINER IMAR-Azores
Research Area: Economics/Entrepreneurship Title: “A Longitudinal Empirical Investigation into the modes of Entry and Exit Entrepreneurship” Doctoral Student: António Miguel Amaral Advisor: Prof. Rui Baptista Initiated: 2005 Expected conclusion: 2007 Current Status: On-going Grant: FCT
Research Area: Innovation and Entrepreneurship Title: Innovation and Entrepreneurship: Study of knowledge based industries Doctoral Student: Joana Serra Mendonça Advisor: Prof. Rui Baptista Initiated: 2005 Expected conclusion: 2008 Current Status: On-going Grant: IN+
Research Area: Innovation and Technology Management Title: Economic development, income inequality, technological change and entrepreneurship; how are regional disparities associated with new technologies and new firm formation? Doctoral Student: Miguel Simões Torres Preto Advisor: Prof. Rui Baptista Initiated: 2005 Expected conclusion: 2009 Current Status: On-going Grant: FCT
Research Area: Innovation Policy Title: Innovation in Portugal: The Role of Incentives as Determinants of Innovation in Portuguese Firms Doctoral Student: Pedro Morais Martins de Faria Advisor: Prof. Pedro Conceição e Prof. Rui Santos Initiated: 2005 Expected conclusion: 2009 Current Status: On-going Grant: FCT
Research Area: Science Policy; Higher Education Policy Title: On the role of Engineering Schools on the process of technological change: a comparative analysis Doctoral Student: Hugo Duarte Alves Horta Advisor: Prof. Manuel Heitor Initiated: 2003 Expected conclusion: 2006 Current Status: On-going Grant: FCT
Research Area: Scientific Culture, Scientific Literacy, Science and Technology Education Title: Bridges to the Future: scientific literacy of youngest Doctoral Student: Eugénia Maria Bengalinha Ramiro Advisor: Prof. Dr. António Firmino da Costa (ISCTE) Initiated: 2004 Expected conclusion: 2008 Current Status: On-going

Activity Report – 2005 ISR-Lisbon Associate Laboratory
55 ISR-Lisbon IN+
CREMINER IMAR-Azores
Grant: FCT
Research Area: Mechanical Engineering Title: Thermo-fluid dynamics of the impingement of transient sprays. Doctoral Student: Miguel Rosa Panão Advisor: Prof. António Luis Moreira Initiated: 2002 Expected conclusion: 2006 Current Status: On-going Grant: FCT
Research Area: Mechanical Engineering Title: Análise termodinâmica de gotas multicomponentes incidentes em superficies aquecidas. Doctoral Student: Ana Sofia Moita Advisor: Prof. António Luis Moreira Initiated: 2004 Expected conclusion: 2008 Current Status: On-going Grant: FCT
Research Area: Environmental Engineering Title: Forest-Atmosphere Carbon and Water exchanges over Eucalyptus Plantation – Measuring and Modeling Doctoral Student: João António Gomes da Silva Mateus Advisor: Gabriel Pita Initiated: 2004 Expected conclusion: 2007 Current Status: On-going Grant: IP project (carboeurope)
E-5) – M.SC THESIS IN PROGRESS (5)
Research Area: Mechanical Engineering Title: Optimização de sistemas de propulsão híbrido eléctrico-diesel, para utilização em frotas. Master Student: Sérgio Faias Advisor: Prof. Paulo Ferrão Initiated: Expected conclusion: 2006 Current Status: On-going Grant:
Research Area: Engineering and Technology Management Title: Definição de uma estratégia industrial para o processamento de resíduos de fragmentação em Portugal Master Student: Pedro Nazareth Advisor: Prof. Paulo Ferrão Initiated: Expected conclusion: 2006 Current Status: On-going
Research Area: Engineering and Technology Management Title: Valores Acrescentados Não-Energéticos de Sistemas Fotovoltaicos Centralizados de Larga Escala: Desenvolvimento de um Sistema de Observação Master Student: Ana Oliveira Advisor: Prof. Paulo Ferrão Initiated:

Activity Report – 2005 ISR-Lisbon Associate Laboratory
56 ISR-Lisbon IN+
CREMINER IMAR-Azores
Expected conclusion: 2006 Current Status: On-going Grant:
Research Area: Sociology Title: Negociação de conhecimentos em contexto de projecto na intervenção social junto de jovens em risco Master Student: Madalena Nunes Advisor: Prof. Rui Santos Initiated: Expected conclusion: 2006 Current Status: On going Grant:
Research Area: Sociology Title: Bola, media e política, Triangulações Master Student: Rahul Kumar Advisor: Prof. Rui Santos Initiated: Expected conclusion: 2006 Current Status: On going Grant:
K) AWARDS
IAMOT Award 2005 (institucional) – “Top 50 global centres of research on Management of Technology”, Intl. Association for the Management of Technology – Manuel Heitor
5 – R&D PROJECTS active in 2005 Project name: Deusa Project leader: Paulo Ferrão Project description and activities in 2005: O PROJECTO VISA O DESENVLVIMENTO DE UM CONJUNTO DE BICICLETAS, COM GRANDE RESPONSABILIDADE AMBIENTAL, AS QUAIS POSSAM SER INTEGRADAS NUM SISTEMA DE MOBILIDADE URBANA MAIS SUSTENTÁVEL. Research Areas: Thematic Area: External Partners: Abimota, AIDA,AIA, APIFER Initiated: 15/04/2003 Expected Conclusion: 31/12/2005 Funding Agency and Contract nº: IAMPEI 04/00180 Documents produced in 2005: Scientif Reports
Project name: INR 2004 Project leader: Paulo Ferrão Project description and activities in 2005: Projecto para o desenvolvimento de uma área de investimento relativa à modelação do sistema económico e da produção e gestão de resíduos. Research Areas: Thematic Area: Gestão de resíduos External Partners: Instituto dos Resíduos Initiated: 09/03/2004 Expected Conclusion: 08/03/2005 Funding Agency and Contract nº: Instituto dos Resíduos 4/04

Activity Report – 2005 ISR-Lisbon Associate Laboratory
57 ISR-Lisbon IN+
CREMINER IMAR-Azores
Documents produced in 2005: Progress Reports Project name: UNESP Project leader: Paulo Ferrão Project description and activities in 2005: O principal objectivo deste trabalho consiste em conjugar competências tecnológicas no desenvolvimento de componentes automoveis com elevada incorporação de fibras naturais. Research Areas: Thematic Area: Contribuição das fibras naturais para o ecodesign automóvel External Partners: UNESP – Universidade Paulista Initiated: 01/01/2003 Expected Conclusion: 31/12/2006 Funding Agency and Contract nº: GRICES/CAPES-2003 Project name: APCV Project leader: Paulo Ferrão Project description and activities in 2005: Desenvolvimento da análise do ciclo de vida das embalagens de cerveja produzida em Portugal pelas empresas ou grupos associados à APCV. Research Areas: Thematic Area: External Partners: Initiated: 01/01/2005 Expected Conclusion: 31/12/2005 Funding Agency and Contract nº: Associação Portuguesa de Produtores de Cervejas (contrato sem numeração) Project name: Ecodesign Project leader: Ferrão Project description and activities in 2005: O trabalho a ser desenvolvido é o de levar a cabo workshops. Research Areas: Thematic Area: External Partners: FRAUNHOFER-GESELLSCHAFT Initiated: 23/12/2004 Expected Conclusion: 22/12/2005 Funding Agency and Contract nº: EUROPEAN COMMISSION /SUBCONTRATO - CONTRATO Nº FIF.20040814 Project name: Biotec Project leader: Paulo Ferrão Project description and activities in 2005: IDENTIFICAÇÃO DE OPORTUNIDADES DE APLICAÇÃO DE CONHECIMENTO ASSOCIADO A BIOTECNOLOGIA A SECTORES ESPECIFICOS DA INDUSTRIA PORTUGUESA Research Areas: Thematic Area: BIOTECNOLOGIA E INOVAÇÃO MA INDUSTRIA PORTUGUESA - ESTUDO DE OPORTUNIDADES TECNOLOGICAS E DE MERCADO External Partners: Associação Empresarial para a Inovação Initiated: 21/06/2005 Expected Conclusion: 20/06/2006 Funding Agency and Contract nº: Associação Empresarial para a Inovação (contrato sem nuneração) Project name: Reequipamento Project leader: Paulo Ferrão Project description and activities in 2005: PROMOVER UMA AGENDA DE INVESTIGACAO EM SISTEMAS, POLITICA TECNOLOGICA E CIENCIAS DA GESTAO Research Areas:

Activity Report – 2005 ISR-Lisbon Associate Laboratory
58 ISR-Lisbon IN+
CREMINER IMAR-Azores
Thematic Area: External Partners: Universidade Católica Portuguesa Initiated: 01/01/2005 Expected Conclusion: 31/12/2006 Funding Agency and Contract nº: Fundação para a Ciência e a Tecnologia / REEQ/994/EGE/2005 Project name: Fogos Florestais Project leader: Paulo Ferrão Project description and activities in 2005: FOGOS FLORESTAIS: FACTORES DE RISCO ASSOCIADOS A DANOS ECONOMICOS E AMBIENTAIS Research Areas: Thematic Area: FOGOS FLORESTAIS External Partners: Reitoria da UTL, ISA, ISEG Initiated: 01/09/2005 Expected Conclusion: 31/08/2008 Funding Agency and Contract nº: REITORIA DA UNIVERSIDADE TECNICA DE LISBOA (contrato sem numeração) Project name: INR 2005 Project leader: Paulo Ferrão Project description and activities in 2005: PROMOVER A INVESTIGACAO SOBRE A GESTAO DE RESIDUOS, ASSEGURAR A GESTAO DE PROJECTOS INR, ACOMPANHAR O DESEMPENHO DAS ENTIDADES GESTORAS DE FLUXOS ESPECIFICOS DE RESIDUOS E ASSEGURAR A TRANSMISSAO DE INFORMACAO Research Areas: Thematic Area: Gestão de Resíduos External Partners: Instituto dos Resíduos Initiated: 27/09/2005 Expected Conclusion: 26/09/2006 Funding Agency and Contract nº: Instituto dos Resíduos / Contrato 12/05 Documents produced in 2005: Progress Reports Project name: BM Lisboa Project leader: Paulo Ferrão Project description and activities in 2005: BALANÇO DE MATERIAIS DO CONCELHO DE LISBOA Research Areas: Thematic Area: External Partners: Lisboa E-Nova Initiated: 12/09/2005 Expected Conclusion: 11/09/2006 Funding Agency and Contract nº: Lisboa E-Nova / Proposta sem numeração Project name: Mudanca Tecnológica e Desenvolvimento Económico Regional: Há Uma Curva de Kuznets Dupla? Project leader: Rui Baptista Project description and activities in 2005: Research Areas: Desenvolvimento económico regional, Mudança tecnológica, Hipótese de Kuznets Thematic Area: Economia e Gestão External Partners: Initiated: 2005/03/01 Expected Conclusion: 2007/02/28 Funding Agency and Contract nº: FCT POCI/EGE/61558/2004 Documents produced in 2005:
Conceição, P., Ferreira, P., and Preto, M.T "Understanding the relationship between inequality and economic growth: testing the augmented Kuznets hypothesis." (submetido à Revista European Economic Review).

Activity Report – 2005 ISR-Lisbon Associate Laboratory
59 ISR-Lisbon IN+
CREMINER IMAR-Azores
Amaral, M. D., Baptista, R., Karaöz, M. Mendonça, J., Preto, M. T. “Inovação, crescimento económico e emprego: o desafio do empreendedorismo”. Em Preparar Portugal para um Novo Ciclo de Fundos Estruturais 2007 – 2013, Baptista, R., Conceição, P., Ferrão, P., Observatório do QCA, Agosto 2005 Project name: Compreender o Ensino Superior de Engenharia, Ciência e Tecnologia em Portugal: Perspectivas para o Desenvolvimento Institucional Project leader: Rui Baptista Project description and activities in 2005: Estudo da evolução dos sistemas de ensino técnico superior em Portugal comparativamente com casos de referência internacional. Research Areas: Políticas de Ciência, Tecnologia, Inovação, Estudos Sociológicos na Mudança Tecnológica, História de Ciência e Tecnologia Thematic Area: Ensino Superior External Partners: Initiated: 2005/02/01 Expected Conclusion: 2008/01/31 Funding Agency and Contract nº: FCT POCI/ESC/56801/2004 Project name: Portal das Cidades e das Regiões Digitais Project leader: Rui Baptista Project description and activities in 2005: O projecto prevê a criação, acumulação e difusão de conhecimento sobra as cidades e regiões digitais em Portugal e no resto do mundo, incluindo a construção de competências à distância com a produção e divulgação de conteúdos especificamente adaptados à realidade nacional. Research Areas: Sistemas de informação, aplicações informáticas, fluxos de informação, Thematic Area: Cidades e Regiões Digitais External Partners: Initiated: 2004/10/01 Expected Conclusion: 2006/09/31 Funding Agency and Contract nº: POSI 702/2.2/C/NRE Project name: Globelics 2005 Project leader: Rui Baptista Project description and activities in 2005: Summer School held between May 23 and June 03, 2005 Research Areas: National Systems of Innovation and Economic Develpoment Thematic Area: External Partners: ISEG Initiated: 2005/02/01 Expected Conclusion: 2005/12/31 Funding Agency and Contract nº: Fundação para a Ciência e a Tecnologia, Fundação Luso-Americana, Fundação, Calouste Gulbenkian Project name: VECTORe Project leader: Rui Baptista Project description and activities in 2005: Curso e competição de planos de negócios para jovens empreendedores Research Areas: Projectos empresariais, organização empresarial Thematic Area: Empreendedorismo External Partners: Initiated: 2005/03/01 Expected Conclusion: 2005/12/31 Funding Agency and Contract nº: Banco Efisa e PME Investimentos Project name: Flexheat Project leader: Edgar Caetano Fernandes

Activity Report – 2005 ISR-Lisbon Associate Laboratory
60 ISR-Lisbon IN+
CREMINER IMAR-Azores
Project description and activities in 2005: The project is aimed at developing low-cost, fuel-flexible, efficient and low pollutining premix burners for domestic heating appliances by means of advanced modeling and design tool. Research Areas: Flexible premixed burners, domestic heating systems Thematic Area: External Partners: Initiated: 2004/11/01 Expected Conclusion: 2007/10/31 Funding Agency and Contract nº: Europeu INCO Contract nº FP6-2002-INCO-WBC-1/FP6-509165 Documents produced in 2005: “FLEXHEAT, FLEXIBLE PREMIXED BURNERS FOR LOW-COST DOMESTIC HEATING SYSTEMS”, 12th month report. Edgar C. Fernandes, Robert E. Leandro Project name: Minknock Project leader: Edgar Caetano Fernandes Project description and activities in 2005: Improving engine performance and efficiency by minimization of knock probability Thematic Area: External Partners: Initiated: 2003/01/01 Expected Conclusion: Funding Agency and Contract nº: Europeu Energie 4-G2, Key Action 6 Contract nº ENK6-CT2002-00643 Documents produced in 2005: “Advanced experimental analysis of auto ignition”, Project nº ENK6-CT-2003-00643: Improving Engine Performance and Efficiency by Minimisation of Knock Probability. Edgar C. Fernandes, Nuno Rolo, Ilídio Guerreiro Project name: Pivnet 2 Project leader: Edgar Caetano Fernandes e Isabel Carvalho (ISEL) Project description and activities in 2005: A European collaboration on development, quality assessment and standardization of Particle Image Velocimetry for Industrial applications Research Areas: Thematic Area: Particle Image Velocimetry External Partners: ISEL Initiated: 2002/05/01 Expected Conclusion: Funding Agency and Contract nº: Fundação para a Ciência e a Tecnologia POCTI/EME/45676/2002 Project name: Experimental study on Vaporization/Radiation Interaction in fuel droplet combustion Project leader: Edgar Caetano Fernandes Project description and activities in 2005: Investigação experimental da interacção vaporização/radiação na combustão de combustíveis líquidos Research Areas: Thematic Area: Particle Image Velocimetry External Partners: Initiated: 2002/05/01 Expected Conclusion: Funding Agency and Contract nº: Fundação para a Ciência e a Tecnologia Project name: Human Oriented Sustainable Transport Project leader: António Luis Moreira Project description and activities in 2005: Research Areas: Thematic Area: Sustainable Mobility External Partners: Delft University (NL), Royal Institute of technology of Stockholm (SE), CIRPS University of Rome “La Sapienza” (I), Matra- (F), Cargo technologies (AUS), PI Technologies (UK), Stile Bertone S.p.a. (I), Enginion (D), LT Consultant (F), Jelley Limited (UK) KVD (NL). Initiated: 2005

Activity Report – 2005 ISR-Lisbon Associate Laboratory
61 ISR-Lisbon IN+
CREMINER IMAR-Azores
Expected Conclusion: 2007 Funding Agency and Contract nº: TST4-CT-2005-012555 Project name: Dynamic behaviour of cryogen spray cooling Project leader: António Luis Moreira Project description and activities in 2005: Research Areas: Thematic Area: Engenharia Mecânica External Partners: Initiated: 2005 Expected Conclusion: 2007 Funding Agency and Contract nº: POCTI/EME/57944/2004 Project name: Fluid-Particle correlations in Non-homogeneous Turbulent Two-Phase Flows Project leader: António Luis Moreira Project description and activities in 2005: Research Areas: Thematic Area: Engenharia Mecânica External Partners: Initiated: 2002 Expected Conclusion: 2005 Funding Agency and Contract nº: POCTI/2001/EME/38082 Project name: Integrated Project CARBOEUROPE IP Project leader: Gabriel Pita Project description and activities in 2005: Enhanced understanding of the controlling mechanisms of carbon cycling in European ecosystems, and the impact of climate change and variability, and changing land management on the European carbon balance. This is achieved by (1) the partitioning of carbon fluxes into their constituent parts (assimilation, respiration, fossil fuel burning), at local, regional and continental scales, (2) the quantification of the effects of management on net ecosystem carbon exchange based on data synthesis, and (3) the development, evaluation and optimisation of ecosystem process models.. Research Areas: Thematic Area: External Partners: 61 research centres from 17 European countries Initiated:2004 Expected Conclusion: 2008 Funding Agency and Contract nº: European Commission, Directorate-General Research, Sixth Framework Programme, Priority 1.1.6.3 Global Change and Ecosystem, Contract No. GOCE-CT-2003-505572. Project name: Interacção entre os ciclos de água e carbono em eucaliptais Project leader: Gabriel Pita Project description and activities in 2005: Medida e Modelação dos ciclos de carbono e da água numa plantação de eucaliptos Research Areas: Thematic Area: External PartnersEstação Florestal Nacional; instituto Superior de Agronomia Initiated:2005 Expected Conclusion: 2008 Funding Agency and Contract nº: FCT- POCI/CLI/60006/2004 Project name: Estrutura de informação para armazenamento de dados de avaliação do ciclo de vida de produtos brasileiros Project leader: Armando Caldeira Pires

Activity Report – 2005 ISR-Lisbon Associate Laboratory
62 ISR-Lisbon IN+
CREMINER IMAR-Azores
Project description and activities in 2005: Desenvolvimento de um conjunto de actividades de pesquisa relacionadas com a área de gestão ambiental Research Areas: Thematic Area: Ambiente External Partners: Initiated: 2005 Expected Conclusion: Funding Agency and Contract nº: Instituto brasileiro de Informação em ciência e Tecnologia e Ministério da Ciência e Tecnologia (Brasil)
Project name: Sensoriamento da emissão quilominescente de chamas para controle da formação de NOx em processos de combustão - SenNOxLuz Project leader: Armando Caldeira Pires Project description and activities in 2005: Visa a optimização do processo de queima de combustíveis fósseis em queimador típico das unidades termoeléctricas da Electronorte, assim como a minimização da formação de Nox neste tipo de queimador Research Areas: Thematic Area: External Partners: Initiated: 2005 Expected Conclusion: Funding Agency and Contract nº: Project name: Maximização da performance energética e minimização da emissão de Nox em turbinas estacionárias através da injecção de diluentes Project leader: Armando Caldeira Pires Project description and activities in 2005: Tem como objectivo geral o aumento da performance de turbinas estacionárias LPP na geração de energia e na diminuição de emissões de Nox através de tecnologias associadas à injecção de diluentes na câmara de combustão. Research Areas: Thematic Area: External Partners: Initiated: 2004 Expected Conclusion: Funding Agency and Contract nº: Centrais Eléctricas do Norte do Brasil S/A - ELECTRONORTE Project name: Sistemas de geração eléctrica por gaseificação de biomassa aplicado a comunidades isoladas Project leader: Armando Caldeira Pires Project description and activities in 2005: O projecto visa o dimensionamento, construção e teste de um sistema de geração de potência, de pequena escala, baseado em ciclo Diesel. Research Areas: Thematic Area: External Partners: Initiated: 2004 Expected Conclusion: Funding Agency and Contract nº: Centrais Eléctricas do Norte do Brasil S/A - ELECTRONORTE
6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005
“VECTORe”

Activity Report – 2005 ISR-Lisbon Associate Laboratory
63 ISR-Lisbon IN+
CREMINER IMAR-Azores
This competion aimed at supporting the formation of new technologicaly based business ideas, fostering marketing strategies.
Lisbon Ideas Challenge A competição Lisbon Ideas Challenge tem como objectivo distinguir ideias e planos de negócio inovadores apresentados por investigadores e estudantes, procurando o aparecimento de projectos empresariais
7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS
7.1 – Involvement on the launching of ``Spin-off´´ enterprises
7.2 – Services contracted and provided to external entities, public and private
7.3 – Organization of activities aiming for diffusion of scientific culture (schools; public in general)
Pensar e Fazer’ 05-06
Realização de trabalhos por crianças e jovens e a discussão nas escolas, e pelas famílias, sobre o papel da engenharia, ciência e tecnologia para assuntos banais da vida quotidiana. O Programa incluiu um concurso com o objectivo de distinguir trabalhos de jovens entre os 6 e 18 anos relacionados com a aplicação de engenharia, ciência e tecnologia em Portugal.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
64 ISR-Lisbon IN+
CREMINER IMAR-Azores
Thematic Area D: Signal Processing for Communications Networks and Multimedia
Activity Report 2005
1 – DESCRIPTION OF SCIENTIFIC ACTIVITIES IN 2005
Action 1. Signal Processing for Wireless Communications Radio Systems
a) Blind Source Separation
Consider a linear, instantaneous mixture of a finite number of uncorrelated sources. We face the problem of estimating the unknown mixture matrix. It is well known that, using only second order statistics, this matrix can only be identified up to a residual orthogonal factor.This constitutes an example of an “intrinsic” ambiguity which occur in many other deterministic estimation problems and prevents a direct application of standard benchmarking tools such as the Cramér-Rao bound (because the Fisher information matrix will be singular). It is intuitive that, to compare the intrinsic performance of given identification algorithms (estimators), one whould conduct the analysis in the quotient space of mixing matrices, which is obtained after the ambiguity is quotiented out. This demands an extension of the Cramér-Rao bound (CRB) to parameter spaces which are more generic than the usual Euclidean ones, e.g., they do not possess a vector space structure. We carried out such a generalization for Riemannian parameter spaces. Our Intrinsic Variance Lower Bound (IVLB) coincides with the CRB in the Euclidean case, and can be used for parameter spaces with curvature such as the Lie group of orthogonal matrices or for more abstract spaces such as the Grassmann spaces.
b) Space Time Coding
We addressed the problem of point-to-point wireless communication in which both the receiver and transmitter are equipped with multiple-antennas. We considered the challenging noncoherent setup, that is, the space-time matrix channel is unknown at both the transmitter and receiver sides. In fact, contrary to most available approaches, we don’t even assume a probabilistic prior for the channel: we model it as an unknown deterministic parameter. Moreover, the Gaussian observation noise is allowed any correlation structure (albeit assumed known at both sides). The receiver implements a Generalized Likelihood Ratio Test (GLRT) detector: (i) this consists in a bank of parallel processors; (ii) each processor is matched to one codeword of the finite codebook employed by the transmitter; (iii) each processor computes the likelihood of the observation assuming the presence of its associated codeword and the channel replaced by its maximum-likelihood estimate; (iv) the processor exhibiting the highest likelihood determines the codeword selected by the receiver. For this architecture, we conducted a theoretical analysis of the probability of error. This is exploited as a figure of merit to design optimal codebooks and translates into solving a high-dimensional, nonlinear optimization problem which we tackle into phases. Phase I constructs a sub-optimal codebook by solving a nearby convex relaxation of the original optimization problem. Phase II refines this sub-optimal codebook through an iterative algorithm which evolves in the Riemannian space defined by the power constraints imposed at the transmitted side. Our codebooks outperform the other constructions available in the literature, both for the high and low snr regimes.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
65 ISR-Lisbon IN+
CREMINER IMAR-Azores
Action 2. Underwater Acoustics
The growing interest in ocean exploration and the recent development of autonomous surface vehicles and submarines that perform inspection tasks in cooperation require efficient and robust data communication systems. Digital communication using acoustic modems is the method of choice for exchanging data among distant or highly mobile equipment used in various underwater activities. However, achieving efficient communication in this environment is challenging due to severe distortions that affect the transmitted signals as they undergo multiple reflections and refractions in their propagation path. Attempts to overcome these impairments in high data rate coherent modems haven't been entirely satisfactory, thus hampering their widespread adoption.
Research on underwater communication systems focused on exploiting intrinsic properties of acoustic wave propagation in the ocean to mitigate the effects of multipath or improve the robustness of signal detection and demodulation. Some effort was also devoted in adapting techniques developed for wireless radio systems to ocean environments.
a) Multicarrier communications:
Previous work on underwater communication using OFDM addressed MIMO equalization as a means of compensating for the severe intersymbol interference introduced by the channel, which makes simpler cyclic-prefix-based schemes impractical. However, the need for an equalizer makes it unclear whether this approach is advantageous relative to single-carrier communication. Moreover, Doppler compensation with multicarrier signaling is significantly more complex than its single-carrier counterpart. At this point, there is a need for real data from sea tests to effectively assess the practical feasibility of underwater OFDM. Such data was gathered in a previous mission at sea, but was found to be of very limited use due to the poor quality of the acquisition equipment. As a result, the focus on high-rate communications in severely dispersive channels shifted back to single-carrier communications during 2005, and little work was done on the topic of underwater OFDM communication other than completion of pending project reports. It is expected that much higher quality experimental OFDM data can be gathered during missions at sea in 2006. Still, this line of research will only play a minor role in future activities.
b) Physics-based signal processing: Time-reversed focusing by using multiple transmit/receive elements was proposed as a means of reducing the effects of intersymbol interference in digital communication signals, including OFDM-modulated waveforms. This feedback process takes advantage of the reciprocity of the propagation medium, and achieves transparent multipath compensation without detailed knowledge of the environment.
Work during 2005 characterized the focusing performance of time-reversal arrays with randomly-spaced elements. Randomly-spaced arrays in free space are known to allow substantial savings in the number of sensors relative to uniform arrays, with only a minor performance degradation. The situation was shown to be similar in a simple underwater waveguide, but attaining the element count where significant savings can be achieved through nonuniform sensor placement (on the order of 100 sensors) is arguably still prohibitively expensive. Work in this area also addressed the analysis of real data collected in time reversal experiments at sea. This confirmed that the practical performance of time reversal is often surprisingly good, sometimes providing reasonable intersymbol interference compensation with extremely sparse arrays. Receiver architectures combining spatial processing through passive time reversal, followed by equalization, were examined.
c) Software-defined radio: As part of this research effort, a prototype underwater acoustic digital communication system is being developed. The system is based on the software-defined-radio approach, whereby digital signal processing is used as high as possible in the frequency conversion chain to create highly flexible emitters and the receivers.
Completion of this activity has been marred by a shortage of manpower. At this point, the hardware architecture has been specified, and the components that make up the core functionality (DSP board, A/D and D/A converter boards) have been procured. The basic software functionality for a real-time single-carrier modem has been completed. This includes packet generation (framing), error-correction coding, equalization and timing and carrier

Activity Report – 2005 ISR-Lisbon Associate Laboratory
66 ISR-Lisbon IN+
CREMINER IMAR-Azores
recovery, which allow the modem to be fully demonstrated with file I/O. Hardware development resumed late in 2005, and is expected to produce two alternative solutions for conversion between passband and baseband. One is a custom-built daughtercard based on upconverter and downconverter ASICS from Analog Devices. The other hardware solution is implemented directly inside an FPGA on the A/D and D/A converter card. Work on this project will cease upon termination of the ongoing tasks, which will result in a basic working prototype.
Action 3. Acquisition of 3D Models of Real Environments
The so-called factorization methods recover 3D rigid structure by factorizing an observation matrix that collects 2D projections of features. These methods became popular due to their robustness—they use a large number of views, which constrains adequately the solution—and computational simplicity—the large number of unknowns is computed through an SVD, avoiding non-linear optimization. However, they require that all the entries of the observation matrix are known. This is unlikely to happen in practice, due to self-occlusion and limited field of view. Also, when processing long videos, regions that become occluded often appear again later. Current factorization methods process these as new regions, leading to less accurate estimates of 3D structure.
1. We developed a global factorization method that infers complete 3D models directly from the 2D projections in the entire set of available video frames. Our method decides whether a region that has become visible is a region that was seen before, or a previously unseen region, in a global way, by seeking the simplest rigid object that describes well the set of observations. This global approach increases the accuracy of the estimates of the 3D shape of the scene and the 3D motion of the camera.
2. Within this framework another fundamental problem in the path of generating 3D models from video is the development of reliable image based tracking and matching processes, together with observer motion estimation capabilities. In other words, before compleating the observation matrix and factorize it one has to construct it in such a way that all coordinates of the same point lie on one column. One contribution was done by formalizing the image point matching for multiple views at once. Assuming rigidity as prior knowledge, we seek the point association among several images that contributes to the “most rigid” scene reconstruction. The formulation results from the extension of previous matching methods using permutation matrices. Essentially, the previous technique was extended to assginment tensors, insetad of assignement matrices. This results in a linear program as before which can be solved efficiently. Of course, usually, overcoming one problem turns explicit many other problems, and here the issue is the huge dimensionality of the resulting optimization problem. Fortunately there is a lot of structure in the model and very efficient decompositions can be exploited to solve it very efficiently.
The majority of current approaches to image motion analysis starts by computing image motion (e.g., optical flow, feature point correspondes) as a previous step. In general, solving this step turns out to be the key to the success of those approaches. We believe it is worth attempting to avoid that intermediate step, by formulating the anaylsis problems directly from the image intensities. For example, the majority of the approaches to the automatic recovery of a panoramic image from a set of partial views are suboptimal in the sense that the input images are aligned, or registered, by matching pointwise features across images, e.g., consecutive frames of a video clip. These approaches lead to propagation errors that may be very severe, particularly when dealing with videos that show the same region at disjoint time intervals. Rather, we use a generative model for the partial views of the panorama and develop an optimization algorithm to compute, in an efficient way, the Maximum Likelihood estimate of all the unknowns involved: the parameters describing the alignment of all the images and the panorama itself , i.e., our method determines the panorama that best matches the entire set of partial views.
As well as for image registration, the problem of inferring 3D orientation of a camera from video sequences has been mostly addressed by first computing correspondences of image features. This intermediate step is the main bottleneck of those approaches. We developed a new 3D orientation estimation method for urban (indoor and outdoor) environments, which avoids correspondences

Activity Report – 2005 ISR-Lisbon Associate Laboratory
67 ISR-Lisbon IN+
CREMINER IMAR-Azores
between frames. The scene property exploited by our method is that many edges are oriented along three orthogonal directions; this is the recently introduced Manhattan world (MW) assumption. We build a probabilistic sequential orientation estimation method, based on an MW likelihood model, which, by exploiting the strucure of the problem (the definition of equivalence classes of equiprojective orientations; the introduction of a new small rotation model, formalizing the fact that the camera moves smoothly; and the decoupling of elevation and twist angle estimation from that of the compass angle), allows a drastic reduction of the search space for each orientation estimate.
2 – HUMAN RESOURCES IN 2005 PhD researchers (staff) - 5 (from which 0 foreign) PhD researchers (Post-Doctoral fellows) – 0 (from which xx foreign) PhD students - 2 (from which 1 foreign) MSc students – 1 (from which 0 foreign) Engineers – 0 (from which 0foreign) Technicians - 0
3 – INDICATORS IN 2005
A - Publications Books (author) Books (editor) Books (chapters in books) Papers in international journals 2 Papers in national journals 1
B - Comunications In international conferences 6 In national conferences
C- Reports 3
D – Organization of Seminars and Conferences 12
E – Advanced Training Ph.D Thesis (concluded) M.Sc Thesis (concluded) 1 Others Ph.D Thesis (in progress) 3 M.Sc Thesis (in progress)
F - Models
G – Software Applications
H - Pilot Instalations
I - Laboratory Prototypes
J - Patents
K - Awards 3
L – Invited Oral Presentations 2
4 – DESCRIPTION OF INDICATORS IN 2005

Activity Report – 2005 ISR-Lisbon Associate Laboratory
68 ISR-Lisbon IN+
CREMINER IMAR-Azores
A -4) IN INTERNATIONAL JOURNALS
A. Martins, P. Aguiar, and M. Figueiredo, Orientation in Manhattan: Equiprojective Classes and Sequential Estimation. In IEEE Trans. on Pattern Analysys and Machine Intelligence, vol. 27, no. 5, 2005.
P. Aguiar and J. Moura, Figure-Ground Segmentation from Occlusion. In IEEE Trans. on Image Processing, vol. 14, no. 8, 2005.
A-5) IN NATIONAL JOURNALS
J. Sobrinho, J. Dias, and P. Aguiar, “O M(in)istério da Educação: ou o Problema da Colocação dos Docentes 2004/2005”, Revista Ingenium, Ordem dos Engenheiros, 2005.
B-1) IN INTERNATIONAL CONFERENCES
João Xavier and Victor Barroso, “Intrinsic Variance Lower Bound (IVLB): An Extension of the Cramér-Rao Bound to Riemannian Manifolds”, IEEE Conference on Acoust. Sp. and Signal Processing (ICASSP’05) – Philadelphia, USA, 2005
Nuno Pinho da Silva, João Paulo Costeira, Robust global mosaic topology estimation for real-time applications, International Conference on Image Analysis and Recognition, ICIAR2005, Toronto, Canada Ricardo Oliveira, João Costeira and João Xavier, “Contour Point Tracking by Enforcement of Rigidity Constraints”, 3DIM – IEEE International Conference on 3-D Digital Imaging and Modelling, Ottawa, Canada, June 2005 Ricardo Oliveira, João Costeira and João Xavier, “Optimal Point Correspondence through the Use of Rank Constraints”, IEEE Conference on Computer Vision and Pattern Recognition, San Diego, USA, June 2005
B. Pires and P. Aguiar, “Featureless Global Alignment of Multiple Images”, IEEE Int. Conf. Image Processing, Genova, Italy, 2005. J. Gomes, V. Barroso. "Directivity Analysis of Time-Reversal Arrays in a Simple Ocean Waveguide." submitted to the 14th European Signal Processing Conference, Florence - Italy, 4-8 September 2006.
C-1) TECHNICAL REPORTS
João Gomes, Victor Barroso, "The ASIMOV High-Speed Link", Final technical report on acoustic communications for project ASIMOV, Instituto de Sistemas e Robótica, pólo do Instituto Superior Técnico, May 2005. João Gomes, Victor Barroso, "SDR Underwater Acoustic Modem", Final technical report for project FUP-MDN 199-2000 (MODEM), Instituto de Sistemas e Robótica, pólo do Instituto Superior Técnico, June 2005. João Gomes, Victor Barroso, Final technical report for project POSI/CPS/33205/2000 (OFDM), Instituto de Sistemas e Robótica, pólo do Instituto Superior Técnico, March 2005.
D-2) – ORGANIZATION OF SEMINARS AND INTERNAL WORKSHOPS Name: Paulo Gonçalves, INRIA, Post. Doc ISR

Activity Report – 2005 ISR-Lisbon Associate Laboratory
69 ISR-Lisbon IN+
CREMINER IMAR-Azores
Description: Empirical model decomposition from a filter bank viewpoint. Coordinators: João Xavier, Diogo Gomes Name: Jorge Buescu Description: “General inequalities for differentiable reproducing kernels” Coordinators: João Xavier, Diogo Gomes Name: Patrick Flandrin, INRIA Description: Chirps everywhere Coordinators: João Xavier,Diogo Gomes Name: Jorge Buescu Description: Os teoremas fundamentais do cálculo Coordinators: João Xavier, Diogo Gomes Name: Franscisco Garcia Description: Local stationarity in passive detection of transient signals Coordinators: João Xavier,Diogo Gomes Name: Carlos Fiorentino Description: Grobner bases in geometry and robotics Coordinators: João Xavier,Diogo Gomes Name: João Luis Sobrinho, IST Description: O M(in)istério da educação ou o problema da colocação dos docentes 2004/2005 URL: Coordinators: João Xavier,Diogo Gomes
Name: Joachim Erven, Prof. Fac. Munique Description: To keep a secret – no secret with mathematics Coordinators: João Xavier,Diogo Gomes Name: Jorge nuno Silva DM/UL Description: O jogo dos filósofos Coordinators: João Xavier,Diogo Gomes Name: Jorge Silva ISEL/ISR Description: Manifold learning with tangent bundle approximation Coordinators: João Xavier,Diogo Gomes Name: Alexander Plakhov, UA Description: Problema aerodinâmico de Newton e problema de transporte de massa URL: Coordinators: João Xavier,Diogo Gomes Name: Diogo Gomes, Prof. IST Description: Some recent problems in stochastic optimal control Coordinators: João Xavier,Diogo Gomes Name: Carlos Bispo, ISR/IST Description: “Optimality of idling policies” Coordinators: João Xavier,Diogo Gomes Name: Diogo Gomes CAMGSD/IST Description: Calculus of Variations and PDEs Coordinators: João Xavier,Diogo Gomes Name: Alexandre Mateus, IN+/IST Description:Interconnection among ISPs in a competitive environment Coordinators: João Xavier,Diogo Gomes

Activity Report – 2005 ISR-Lisbon Associate Laboratory
70 ISR-Lisbon IN+
CREMINER IMAR-Azores
Name: Diogo Gomes, CAMGSD/IST Description:Probability and PDEs” Coordinators: João Xavier,Diogo Gomes
E-2) – M. Sc THESIS (concluded) (1)
Nuno Pinho da Silva, “Global Robust Image Registration”, Master Thesis, Instituto Superior Técnico, Lisbon, Portugal, April 2005.
E-4) – Ph.D THESIS IN PROGRESS (3)
Research Area: Computer Vision Title: Multi-view Correspondendce by Enforcement of Rigidity Constraints Doctoral Student: Ricardo Crespo Oliveira Advisor: João Paulo Costeira Initiated: 2002 Expected conclusion: 2006 Current Status: Researching Grant: FCT Research Area: Wireless Communications Title: Non-coherent communication for multiple-antenna wireless systems Doctoral Student: Marko Beko Advisor: João Xavier Initiated: 2004 Expected conclusion: 2007 Current Status: On-going Grant: FCT Research Area: Computational Learning Title: Classificação de documentos usando aprendizagem baseada em núcleos Doctoral Student: André T. Martins Advisors: Mário A. T. Figueiredo, Pedro M. Q. Aguiar Initiated: 2005 Expected conclusion: 2008 Current Status: On-going Grant: FCT
K) AWARDS
Luís Vidigal prize for the two best graduation project on EECS (ex aequo): “Imagens Panorâmicas”, Bernardo Esteves Pires, advisor: Pedro M. Q. Aguiar.
“Limiar de Desempenho para Estimação Bayesiana de Parâmetros em variedades Riemannianas”, João Leonardo, advisor: João Xavier.
B. Pires and P. Aguiar. "Featureless Global Alignment of Multiple Images", ICIP2005, rated by the IEEE ICIP TC among the top 10 % of the accepted papers.

Activity Report – 2005 ISR-Lisbon Associate Laboratory
71 ISR-Lisbon IN+
CREMINER IMAR-Azores
L) INVITED ORAL PRESENTATIONS (PLENARY LECTURES; KEYNOTE LECTURES) João Xavier, Intrinsic Variance Lower Bound (IVLB) for Unbiased Estimators on Riemannian Manifolds, Invited oral presentation at Australian National University (ANU). João Xavier, Intrinsic Variance Lower Bound (IVLB) for Unbiased Estimators on Riemannian Manifolds, invited oral presentation at University of Melbourne.
5 – R&D PROJECTS active in 2005 Project name: AMA - AUTOMATIC MODELLING OF ARCHITECTURE Project leader: Pedro M. Q. Aguiar
The goal of this project is to develop a new approach to the fully automatic 3D modelling of architecture from a video sequence. The recovery of 3D structure (3D shape and 3D motion) from a video sequence has been widely addressed in the recent past by the computer vision community. The strongest cue to estimating the 3D structure from a video clip is the 2D motion of the brightness pattern in the image plane. For this reason, the problem is generally referred to as structure from motion (SFM). Early approaches to SFM processed a single pair of consecutive frames. Two-frame based algorithms are highly sensitive to image noise. More recent research has been oriented towards the use of longer image sequences. The problem of estimating 3D structure from multiple frames has a larger number of unknowns (the 3D shape and the set of 3D positions) but it is more constrained than the two-frame SFM problem because of the rigidity of the scene. The usual approach to multi-frame SFM relies on the matching of a set of feature points along the image sequence. Dense 3D shape estimates usually require hundreds of features that are difficult to track and that lead to a complex correspondence problem. Due to this difficulty, the automatic 3D modelling from video is still an open research problem. This project attempts to overcome the difficulty outlined above by taking into account the more distinctive characteristic of common buildings - the flatness of their walls. The methods and algorithms to be developed within this project consider particular scenes whose 3D shape is well described by a piecewise planar model. Under this scenario, instead of tracking pointwise features, one can track larger regions where the 2D motion is described by a single set of parameters. The 3D structure of the scene is then computed from the 2D motion parameters. This approach avoids the correspondence problem and is particularly suited to constructing 3D models for buildings and urban scenes that are well described by piecewise flat surfaces. The proposed project will lead to a method that is simultaneously a powerful tool to "virtualize" buildings and urban scenes and a further step into the development of artificial vision systems. Usually, constructing 3D scene descriptions suitable to virtual manipulation requires a lot of human interaction. The usefulness of the proposed method is due to the fact that it replaces the human interaction by a procedure that recovers 3D models from a video clip in a fully automatic way. That method can also be seen as a further step into the development of artificial vision systems because the piecewise planar assumption is valid as an approximation of the shape of the environment in more general scenarios. The approach to be followed in this project is then summarized in the following two steps: Step i) From the video sequence, estimate the set of parameters describing the 2D motion of the image brightness pattern. The 2D displacement between two perspective views of the points that fall into a plane is given by a homography. The first part of the project will be devoted to the development of a new method to robustly estimate homographies from pairs of images. Step ii) Given the set of parameters describing the 2D motion, compute the 3D shape of the scene and the 3D motion of the camera. The second part of the project concerns solving this large non-linear problem by using linear subspace constraints that proved to be efficient in related problems.
Research Areas: Image Processing, Computer Vision. Thematic Area: Signal Processing for Communication Networks and Multimedia. - themeD External Partners:
Initiated:April 2002
Expected Conclusion: April 2005

Activity Report – 2005 ISR-Lisbon Associate Laboratory
72 ISR-Lisbon IN+
CREMINER IMAR-Azores
Funding Agency and Contract nº: FCT POSI/SRI/41561/2001
Documents produced in 2005:
6 – PROGRAMMES FOR POST-GRADUATE STUDENTS AND ADVANCED TRAINING OF YOUNG RESEARCHERS in 2005
7 – TECHNOLOGY TRANSFER / DIFFUSION AND VALORISATION OF RESULTS
7.1 – Involvement on the launching of ``Spin-off´´ enterprises
7.2 – Services contracted and provided to external entities, public and private By request of the Ministry of Science, Technology and Higher Education, ISR participated in the activities of the Portuguese Electronic Passport (PEP) working group. Particular assignments were given within the enrollment process. The particular actions undertaken by ISR were: - Evaluation of the state of the art and analysis of the ICAO norms for documents with biometric data (ICAO 9303). - On site evaluation of 2 forerunners in the biometric passport process: Holland and Sweden. - Definition of requirements for the biometric data capture machine for the PEP. - Helped launching a competition among several companies for delivery of a prototype. - Participation in the jury for the performance evaluation and final decision about the enrollment station.
7.3 – Organization of activities aiming for diffusion of scientific culture (schools; public in general)