Embed Size (px)
Citation preview

ACTIVE VIBRATION CONTROL OF FLEXIBLE PLATE STRUCTURE
USING SMART MATERIAL
MOHD FAIRUS BIN JAMID
UNIVERSITI TEKNOLOGI MALAYSIA

ACTIVE VIBRATION CONTROL OF FLEXIBLE PLATE STRUCTURE
USING SMART MATERIAL
MOHD FAIRUS BIN JAMID
A thesis submitted in fulfillment of the
requirements for the award of the degree of
Master of Mechanical Engineering
Faculty of Mechanical Engineering
Universiti Teknologi Malaysia
AUGUST 2012

ii
This modest study is dedicated
To the following persons
Who have touched my life
In significant ways,
More than they’ll ever know
Beloved wife,
Fatimah Hishamuddin;
Mother,
Sumingah Binti Basiran;
Father,
Jamid Bin Taruji;
Adorable brothers and sisters,
Abang Edy, Akak Lin;
Not forgotten,
Prof. Dr. Hishamuddin Bin Jamaluddin
Nor Aizan Binti Mohamad Nor
At long last, I’ve finally made it!

iii
ACKNOWLEDGEMENT
Alhamdulillah, all praise is due to Allah S.W.T, the Most Beneficent and the
Most Merciful, who has taught me what I knew not.
I would like to express my deepest appreciation to my project supervisor,
Prof. Madya. Dr. Intan Zaurah Mat Darus for all advices, encouragement, and critics
given throughout this thesis. Without her continued support and guidance, this thesis
would not have been completed. I also like to give my sincere thanks for giving me
the opportunity to run this project (research). This project has given me valuable
experience especially in learning various aspects sensors, programming and control.
I would like to further extend my gratitude to all lecturers, researchers, my
friends in FKM, all suppliers and technicians who has assisted me directly and
indirectly throughout the progress in completion of my project. I will not forget all
opinions and supports given.
Last but not least, I want to whole heartedly give my appreciations to my
beloved wife, Fatimah, for giving me the unlimited supports and motivation when I
faced the difficulties in carrying out this project.
Thank you all.

iv
ABSTRACT
Vibration often is one of the limiting factors in the performance of many
applications and various fields such as aerospace, automotive, submarines, robotic
industries, and all mechanical structures. The conventional method of suppressing
the vibration is by using passive damping which consists of mounting passive
material on the structure. This, however, will lead to increasing the weight of the
structure and hence decreasing its performance. This research is aimed to investigate
the method of vibration suppression using active vibration control approaches for the
flexible plate structure. Firstly, the vibration characteristic of the plate structure is
investigated. This involved a parametric identification of the vibrational flexible
plate system. The Recursive Least Square algorithm was used in this study to
identify the dynamic behaviour of the flexible plate. Input and output vibration
signals were acquired from the flexible plate test-rig using two accelerometers as the
sensors and National Instruments Data Acquisition System. The two sensors detect
the vibration response along the plate caused by the excitation of the primary source
(excitation point). Then, the signals are processed by on-line identification technique
using Recursive Least Square estimator. The parameters for the controller are
generated using the dynamic model of the system obtained from the estimator. The
controlled signal is later fed to the plate to generate a superimpose signal to eliminate
the unwanted vibration via smart material actuator. Finally, the performance of the
Active Vibration Control algorithm developed using Recursive Least Square
estimator is evaluated, verified and validated. The result demonstrates the ability of
the Active Vibration Control algorithm using Recursive Least Square estimator to
suppress the vibration of the flexible plate structure.

v
ABSTRAK
Getaran merupakan salah satu faktor penghalang dalam melaksanakan
kebanyakan prestasi sesebuah aplikasi, contohnya di dalam bidang aeroangkasa,
automotif, kapal selam, robot industri dan semua struktur mekanikal. Teknik
konvensional dalam mengurangkan getaran adalah dengan menggunakan redaman
pasif yang terdiri daripada pemasangan bahan pasif ke atas struktur seperti getah.
Walau bagaimanapun, ini akan meningkatkan berat keseluruhan struktur dan akan
mengurangkan prestasinya. Tujuan kajian ini adalah untuk menyiasat pengurangan
getaran pada struktur plat fleksibel menggunakan sistem anti getaran secara aktif.
Sebagai permulaan, ciri-ciri struktur getaran sebuah plat akan dikaji. Ini melibatkan
pengangaran model menggunakan sistem parametrik bagi menghasilkan logaritma
kawalan getaran pada plat fleksibel. Algoritma Recursive Least Square telah
digunakan dalam kajian ini bagi mengenalpasti tingkah laku dinamik plat tersebut.
Isyarat getaran bagi masukan dan keluaran yang diperolehi dari bahan kajian plat
fleksibel akan di rakam dengan menggunakan dua meter alat pengesan dan alat
sistem perolehan data. Kedua-dua alat pengesan akan mengesan getaran sepanjang
plat yang disebabkan oleh alat pengetar. Kemudian, isyarat tersebut diproses secara
langsung dengan menggunakan Algoritma Recursive Least Square. Parameter untuk
pengawal ini dijana menggunkan model dinamik system yang diperolehi daripada
penganggar. Isyarat terkawal kemudiannya disuap kepada plat untuk menghasilkan
isyarat berlawanan untuk menghapuskan getaran yang tidak diingini melalui
penggerak bahan pintar. Akhir sekali, prestasi penganggar yang telah dibangunkan
mengunakan algoritma Recursive Least Square akan dinilai, dianalisa and disahkan.
Hasil dari kajian ini telah menunjukkan keupayaan penganggar aktif sebenar untuk
mengurangkan getaran pada struktur plat fleksibel.

vi
TABLES OF CONTENTS
CHAPTER TITLE PAGE
DECLARATION i
DEDICATION ii
ACKNOWLEDGEMENTS iii
ABSTRACT iv
ABSTRAK v
TABLE OF CONTENTS vi
LIST OF TABLES vii
LIST OF FIGURES xi
LIST OF ABBREVIATIONS xii
LIST OF SYMBOLS xiv
LIST OF APPENDICES xv
1 INTRODUCTION
1.1 Overview 1
1.2 Background of the problem 4
1.3 Statement of the problems 5
1.4 Objectives 6
1.5 Scope of the study 7
1.6 Methodology of the study 8
1.7 Gantt chart 10
1.8 Summary 11

vii
2 LITERATURE REVIEW
2.0 Introduction 12
2.1 Smart structure 12
2.2 Definition of plates 15
2.3 Active Vibration Control (AVC) 16
2.4 Recent active vibration control techniques 20
2.4.1 Feed-forward control 20
2.4.2 Feedback control 21
2.4.3 Collocated and non-collocated 22
2.4.4 Recent development 23
2.5 Smart material 26
2.5.1 Piezoelectric 26
2.5.1.1 Recent advantage 27
2.5.1.2 Piezoelectric as sensor 28
2.5.1.3 Piezoelectric as actuator 30
2.6 Hardware 31
2.6.1 Vibration exciter 31
2.7 Summary 33
3 PARAMETRIC IDENTIFICATION
3.0 Introduction 34
3.1 System identification 35
3.2 Identification algorithms 36
3.2.1 System input-output data finding 37
3.2.2 Model structure 38
3.2.2.1 The ARX model 38
3.2.2.2 The ARMAX model 40
3.2.3 Model estimation 42
3.2.3.1 Least squares estimation 42
3.2.3.2 Recursive least squares estimation 48
3.2.3.3 Model validation 54
3.2.3.3.1 One step-ahead prediction 55
3.2.3.3.2 Mean squared error 56

viii
3.2.3.3.3 Correlation test 56
3.3 Implementation and result 58
3.3.1 Sine wave excitation input 56
3.3.2 Square wave excitation input 60
3.3.3 Triangle wave excitation input 61
3.4 Summary 68
4 EXPERIMENTAL SET UP
4.1 Introduction 69
4.2 Design consideration 70
4.3 Flexible structure rig 71
4.4 Experimental hardware (components) 72
4.4.1 Vibration exciter using electromagnetic shaker 72
4.4.2 Development of electromagnet shaker 73
4.4.2.1 Coil research and study 73
4.4.2.2 Coil development 74
4.4.2.2.1 Coil dimension 75
4.4.2.2.2 Material 76
4.4.2.2.3 Current range 77
4.4.2.2.4 Ampere turns 77
4.4.2.2.5 Total turns 78
4.4.2.2.6 Total length 78
4.4.2.2.7 Weight 78
4.4.2.2.8 Total resistance 79
4.4.2.2.9 Power (heat) 79
4.4.2.2.10 Dissipation 79
4.4.2.2.11 Force 80
4.4.2.2.12 Coil development analysis 80
4.4.2.2.13 Integrated coil’s with the design objective 83
4.4.3 Power amplifier & Function Generator 85
4.4.4 Data acquisition system 87
4.4.5 Piezoelectric 88
4.4.5.1 Piezoelectric amplifier 90

ix
4.4.6 Accelerometer 91
4.4.6.1 Calibrator 92
4.5 Software 95
4.6 Summary 97
5 IMPLEMENTATION OF ACTIVE VIBRATION CONTROL
5.1 Introduction 98
5.2 SISO – active vibration control 99
5.3 Controller design 101
5.4 Identification algorithms 103
5.4.1 Recursive least square (RLS) – active vibration
control
103
5.5 Implementation and results 109
5.5.1 Experimental set-up 112
5.5.2 Experimental procedure 113
5.5.2.1 Finding parameter for model Q0 and Q1 114
5.5.2.2 Implementation of the controller 117
5.5.2 Experimental results 118
5.6 Comparative assessments of the performance of the
controllers
124
5.7 Summary 125
6 CONCLUSION AND FUTURE WORK
6.1 Conclusion 126
6.2 Recommendation for future work 128
6.2.1 Control method based on system identifications. 128
6.2.2 Acquisition system 128
6.2.3 Multi Output configuration 129
6.2.4 Improvement control in different mode of
disturbance and location of actuator
129

x
REFERENCES 130
PUBLICATIONS 135
APPENDIX A - G 136

xi
LIST OF TABLES
TABLE NO. TITLE PAGE
4.1 Physical parameters of plate 72
4.2 Coil data for the electromagnet shaker 75
4.3 AWG data 77
4.4 Coil’s analysis (based on 1 ampere) 84
4.5 Technical data of the Kistler Type 8921 93
5.1 Attenuation values for the first five modes of vibration 123

xii
LIST OF FIGURES
FIGURE NO. TITLE PAGE
1.0 Fibres of composite materials and piezo-electric
devices are used in the blades of the helicopter rotor
2
1.1 Project flow chart 9
2.1 Magneto-Rheological (MR) of smart material used on
damper
13
2.2 Implementing the smart material on smart structure 14
2.3 The distinguishing limits of plates 15
2.4 Schematic of an active vibration control (AVC)
system
19
2.5 Principle of feed-forward control 21
2.6 Principle of feedback control system 22
2.7 Collocated actuator and sensor 22
2.8 Active vibration control of a flexible beam using a
non-collocated acceleration sensor and piezoelectric
patch actuator
24
2.9 Piezoelectric effect 26
2.10 Piezoelectric sensor 28
2.11 Single Input Single Output feedback control system 29
2.12 Piezoelectric actuator 30
2.13 Electromagnet (Xia) produced by current from a
battery
31
2.14 Electromagnet holding nail when switch S is closed 32

xiii
for current in coil.
3.1 Block diagram of a system 35
3.2 Procedure of system identification 37
3.3 Model Structure of ARX 38
3.4 Model structure ARMAX 40
3.5 Input-output of a system including all possible input
and disturbance component.
42
3.6 Visualization of recursive estimation as an iterative
process in which the model parameters are adjusted by
an update mechanism derived from a measure of the
model quality indicated by the error ϵ(t).
49
3.7 Sine Wave excitation input 59
3.8 Square excitation wave input 59
3.9 Triangle excitation wave input 59
3.10 RLS prediction using sine wave input 62
3.11 Sine wave excitation input 63
3.12 RLS prediction using square wave input 64
3.13 Square excitation wave input 65
3.14 RLS prediction using triangle wave input 66
3.15 Triangle excitation wave input 67
4.1 Active vibration control structure 70
4.2 Flexible plate structure rig 71
4.3 Electromagnet shaker 73
4.4 Basic electromagnet 74
4.5 Coil dimension 75
4.6 Development of electromagnetic shaker 85
4.7 Power amplifier 86
4.8 Function generator type TG1010A 86
4.9 NI cDAQ-9172 87
4.10 Piezoelectric device 88
4.11 Actuator Mode 89
4.12 Sensor Mode 89
4.13 E-835 OEM amplifier modules with piezoceramic 90

xiv
DuraAct
4.14 Accelerometer 91
4.15 Location of two accelerometers 92
4.16 Calibrator Kistler Type 8921 93
4.17 Calibration chart for Kistler 8636C5 and 8636C50
accelerometer
95
4.18 Block diagram of the control program 96
4.19 Front panel show the measurement and control data 97
5.1 Active Vibration Control structure 99
5.2 Schematic diagram of SISO feed-forward AVC
structure
100
5.3 Block diagram of SISO feed-forward AVC structure 101
5.4 Arrangement of active vibration control structure 110
5.5 Self-tuning active vibration controller 111
5.6 When secondary off Q0 114
5.7 Estimated parameter values 116
5.8 Estimated errors 116
5.9 When secondary on, Q1 117
5.10 Plate response in time domain 118
5.11 Predicted output error when secondary off 119
5.12 Estimated parameter when secondary off 120
5.13 Estimated output error when secondary on 120
5.14 Estimated parameter when secondary on 121
5.15 Vibration response and control signal 121
5.16 Vibration suppression on observation point 122
5.17 Power spectrum density of the plate 122
5.18 Frequency domain response 123
5.19 Spectral attenuation of the plate 123

xv
LIST OF ABBREVIATIONS
RLS Recursive Least Square
LS Least Square
AVC Active Vibration Control
PC-Based Personal Computer – Based
MR Magneto – Rheological
CASA Continuous Ant System Algorithm
ARX Auto – Regressive with Exogenous
MSE Mean – Squared Error
PZT Piezoelectric
SRF Strain Rate Feedback Control
PPF Positive Feedback Control
PID Proportional–Integral–Derivative Controller
RMS Root Mean Square
MIMO Multi Input Multi Output
AFC Active Fibre Composite
MFC Macro Fibre Composite
ARMAX Autoregressive Moving Average Model with Exogenous Inputs
AR Autoregressive
DAQ Data Acquisition System
USB Universal Serial Bus
I/O Input Output
IEPE Integrated Electronics Piezo-Electric
BNC Bayonet Neill-Concelman (Common type of RF connector)
NI National Instruments

xvi
FFT Fast-Fourier Transformation
LED Light-Emitting Diode
SISO Single Input Single Output
C Controller Transfer Function
OSA One Step Ahead Prediction

xvii
LIST OF SYMBOLS
N Newton
Infinity
pH measure of the acidity or basicity
y System output
u System input
w System measured disturbance
t Time
y(t) System output at time t
u(t) System input at time t
e(t) System white noise at time t, random disturbance
N The number of available data
)( 1zA Polynomials with associated parameters of autoregressive and
exogenous parts
n The orders of polynomials of the autoregressive
m The orders of polynomials of the exogenous parts
v(t) Measurable disturbance
D(t) Drift disturbance
1z Backward interpolation
θ Vector of unknown parameters
x(t) Regression vector partly consisting of measured input/output
Vector of adjustable model parameters
)(ˆ te Corresponding modelling (or fitting) error at time t
J The sum of squares of errors
ϵ(t) Error

xviii
y(n) Actual output
)(ˆ ny Predicted output
ϕuɛ(τ) Cross-correlation function
z Deflection on z axis
re Detector located at a distance re relative to the primary source
d Secondary source located at a distance d relative to the primary
source
rf Secondary source located at a distance rf relative to the detector
rg Observation point located at distances rg relative to the primary
source
rh Observation point located at distances rg relative to the secondary
source
E Transfer function of the paths through re
F Transfer function of the paths through rf
G Transfer function of the paths through rg
H Transfer function of the paths through rh
M Transfer characteristics of the detector
C Transfer characteristics of the controller
L Transfer characteristics of the secondary source
UD Primary signal at the source locations
UC Secondary signal at the source locations
YD = YC Corresponding signal at the observation point
UM Detected signal
Y Observed signal
Q0 Secondary source is off
Q1 Secondary source is on
UC=0 Controller is on
UC ≠ 0 Controller is off
)(ˆ i Estimation of current parameter vector
)1(ˆ i Previous estimated vector
E(i) error
P(i) covariance matrix

xix
LIST OF APPENDICES
APPENDIX TITLE PAGE
A Standard American Wire Gauge (AWG) data for
bare copper
136
B Kistler piezo BEAM accelerometers 140
C NI compact DAQ USB data acquisition system 143
D DuraAct piezoelectric patch transducers 158
E Piezo amplifier module 161
F Kistler accelerometer calibrator 164

CHAPTER 1
INTRODUCTION
1.0 Overview
Nowadays, applications of smart materials and structures have received
considerable attention from many researchers. Both of these studies are currently
attempts to build active structural systems to provide a necessary improvement of
structural performance. Basically, smart materials can be employed as actuator and
sensor which in the form of wafers, bimorph benders, and multi-layered benders
(Kumar et al, 2007). A group of research from Boeing Company, the University of
Maryland, the Massachusetts Institute of Technology, the University of California
(Los Angeles) and the U.S. Army Research Office has support one projects for the
development and application of this smart material application used on helicopter
rotor shown in Figure 1.0. In their research, they used fibers of composite materials
and piezoelectric devices on the blades of the helicopter rotor to attenuate the
vibrations and also improving the aerodynamic performance (Viana et al, 2006).
Plate structures have been used extremely in many engineering applications
because of their benefits of flexible structures such as in aerospace, automotive,
submarines, robotic industries, and all mechanical structures. However, these

2
flexibility of the plate and highly-nonlinear dynamics of the system, it’s a major
problem which found in industry that can lead the flexible plate to vibrate at it
resonant mode (Mat Darus et al, 2003; Safizadeh et al, 2010). While in designing a
structure application, plates are usually specified only to withstand applied static
loads. The dynamic forces and random cyclic loads also can threaten the stability of a
system. There exist a large number of discrete frequencies at which a rectangular
plate will undergo large amplitude vibration by sustained time varying forces of
matching frequencies. Thus, the possibility of large displacement and stresses due to
this recent type of excitation must be taken into account (Tavakolpour et al, 2008).
Figure 1.0: Fibers of composite materials and piezo-electric devices are used
in the blades of the helicopter rotor
Practically, the aerospace composite structural constructions are relatively
thin walled and become flexible. Therefore, this application is treated as lightly
damped systems. During the flight, the vibration can occur from the unsteady
aerodynamics in these structures. These vibrations usually take a longer time for the
oscillatory energies to decay down. During this period of time the vibration in
structures generally reduces their load carrying abilities and may cause fatigue and
Copper/Kapton Electrodes
Polymer Matrix
Piezoceramics Fibers
Active Plies

3
dynamic instability related to the problems. For that reason, vibration control is
prefer to enhance the structural performance and also further to avoid catastrophic
failures such as flutter and lifting surfaces (Kumar et al, 2007).
The usual method to avoid the failure of flexible plates due to vibratory
disturbances is to alter the geometry or boundary conditions of the plate according to
the frequency value of the vibration sources. Sometimes, it would be impossible to
anticipate the frequency of disturbances owing to time dependent characteristics of
the destructive vibrations. Due to this drawback, the idea of controlling the unwanted
vibrations came into being. To reduce the amplitude of the destructive vibration in a
structure, two control strategies, namely the passive and active methods can be
employed. The passive method consists of mounting passive material on the
structure. This method is relatively efficient at high frequencies but expensive and
bulky at low frequencies. According to Johnson, this passive method can be divided
into two classes structural and embedded. The structural damping occurs due the
friction of junctions, cable rubbing and material damping. The embedded damping is
achieved by adding dissipation mechanisms to the structure, commonly based on one
of the following damping techniques; viscoelastic materials, viscous devices,
magnetic devices and passive piezoelectric (Johnson, 1995).
The active method in controlling vibration uses the superposition of waves by
generating secondary source(s) to destructively interfere with the unwanted source
and thus result in a reduction in the level of vibration. This is found to be more
efficient and economical than the passive method at low frequency vibration
suppression (Mat Darus et al, 2004). To design a suitable controller for active
vibration control of a flexible thin plate, it is vital to have a good understanding
about the dynamics of the system. The dynamic behavior of thin isotropic rectangular
plates is a subject that has received considerable attention in recent years because of
its technical importance.

4
1.2 Background of the problem
Many effort has been done by the researcher’s in order to deal with vibration
alleviation in flexible structures system (Sinawi et al, 2004; Viana et al, 2006;
Jnifene et al, 2007; Kumar et al, 2007; Cavallo et al, 2008; Tavakolpour et al, 2008).
The potential flexible structure in various applications is leads to the highly demand,
because of having reliable, lightweight and efficient of flexible structure (Mat Darus
et al, 2003; Zhou et al, 2004; Ismail et al, 2006). However, when flexible structures
are subjected to dynamic forces and random cyclic loads as well as rigid body
displacements, theirs behavior presents a number of discrete frequencies at which
these flexible structure will undergo large amplitude vibration by sustained time
varying forces and flexible mode of vibrations (Gaudiller et al, 2005; Tavakolpour et
al, 2009). Due to the advantages of flexible structures are widely has been used in
various fields of applications, such as in many engineering fields on civil,
mechanical, marine (Carra et al, 2007), aerospace engineering field (Mukherjee et al,
2002), and others. However, these advantages of flexible plate will be affected due to
the unwanted structural vibrations. Thus, controls of flexible systems have been a
challenge and have received the attention of a large number of researchers (Jnifene et
al, 2007).
Controls of vibration of flexible structure have been studied over the past 20
years with different strategies and behavior. The conventional control methods have
not been widely successful due to the dynamic complexity of flexible structure (Mat
Darus et al, 2004). These systems reduced the vibration and noise by simply
dissipating energy as heat. These conventional method is known as passive control
method, consists of mounting passive material on the structure in order to change its
dynamic characteristics such as stiffness and damping coefficient (Viana et al, 2006).
Unfortunately, this method is efficient at high frequencies but expensive and bulky at
low frequencies (Hossain et al, 1997). Passive vibration control usually leads to
increase in the overall weight of structure, which makes it less transportable
especially for space applications. Moreover, their damping performance is generally
quite poor because they are enabling to adapt or return to changing the disturbance

5
over time. However, conventional control is widely used because of its low cost and
simplicity.
Recently, due to the technological advancements such as the availability of
high-power and low cost computing, smart materials, and advanced control
techniques have led to a growing use of active control such as active force control or
active vibration control systems. The implication of these control strategies is that
desirable performance characteristics can be achieved through the complexity of
flexible structure and clever strategies, whereby actuators excite the structure based
on the structure’s response measured by sensors (Colla et al, 2009). Control of these
structures involves a number of disciplines, including structural dynamics, control
theory, and materials engineering. Present research focus is on developing control of
flexible structure systems, incorporating conventional based identification, to
overcome the above-mentioned problems.
1.3 Statement of the problems
Vibration is often a limiting factor in performance of many fields application.
Many precision industrial processes in the fields of aerospace, ground transportation,
agriculture, measurement, life sciences, semiconductor industry and nanotechnology
cannot take place if the equipments are being affected by vibration. The conventional
method of decreasing the vibration level is to use passive damping which consist of
mounting passive material on the structure.
The aim of this research is to investigate and develop the active vibration
control systems of a flexible structure and to validate the controller performance by
experimental study. This study is focused on the flexible structure than rigid
structures as they are capable of being operated at high speeds and handling of a

6
larger payloads with the same actuator capabilities (Hossain et al, 1995). Flexible
structure with several boundary conditions will be considered. Firstly, by
understanding the dynamic characteristics and mode classification of the flexible
structure, it will be useful tool to assist for the development of the control strategies
(Ismail et al, 2006).
A schematic diagram of the SISO feed-forward AVC structured has been
considered in this study due to understanding the dynamics characteristics and mode
of vibration of the flexible structure (Hossain et al, 1995; Tokhi et al, 1997). A
dynamic response of the structure is developed through an experimental study. Thus,
the system has been introduced structural vibration at (primary) point source into the
structure systems. The dynamics response then were detected by a sensor and thus
signal is fed to an actuator (secondary) point source for generation of the
superimposed signal on the primary signal to achieve vibration reduction at the
observation point (Mat Darus et al, 2004).
In order to design an active controller for the vibration suppression, the
identification system has been used in order to find an accurate model of the systems.
A conventional method for identification system such as Least Squares (LS) and
Recursive Least Squares (RLS) have been considered (Mat Darus et al, 2004).
1.4 Objectives
The objectives of this research are to:
1. Develop an active vibration control algorithm for vibration
suppression of a flexible plate structure.

7
2. Develop an experimental rig for the implementation of an active
vibration control of the flexible plate structure.
3. Implement and validate thus developed an active vibration control
algorithm on the developed experimental rig.
1.5 Scope of the study
The following are the scope of the study:
1. Development of flexible plate structure rig. The experimental rig has
been setup employing mechatronic approaches. Actuator and sensor
were attached to the experimental rig such as electromagnetic shaker,
piezoelectric sensor/actuator, and accelerometer.
2. Development of an electromagnetic shaker as the primary disturbance
for the plate structure.
3. Data collection using PC-Based equipment such as data acquisition
system and analyzer.
4. The system identification of the plate structure using conventional
parametric modeling technique such as Recursive Least Squares
(RLS) were carried out.
5. Development of a conventional an active vibration control system.
6. Testing and verification of the developed active vibration control
technique through experimental validation.

8
7. Comparative assessment of the experimental result with the
simulation result.
1.6 Methodology of the study
This research focused on the development of an active vibration control
techniques based on system identification methods for vibration suppression of
flexible structures by experimental studied. The methodologies of the study were
divided into four major sections:
a) Literature Review – This section discussed reviewed on active vibration
control, smart structure, smart material, system identification, control
strategy and self-tuning control.
b) Parametric Identification – This section discussed on the model selection,
model estimation, model validation & implementation, and results with
difference excitation input.
c) Experimental Study – This section discussed on the experimental rig
hardware and software, equipment preparation, experimental setup and
experimental procedure.
d) Active Vibration Control (AVC) – This section discussed on the control
design of AVC, model estimator on system identification, implementation
of the controller using online identification in self-tuning of AVC.

9
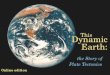
The flowchart of the research can be clearly seen in step by step process as
shown in Figure 1.2.
Figure 1.2: Project flow chart
Design process
Development computer
based control system
Development of
experimental study
Experimental
Set-up
Perform identification
algorithms of the system
Start
Literature review
Problem identification
Computer-based control
controlling & recording
Implementation of
active vibration control
Result validation
Report thesis
End

10
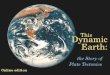
1.7 Gantt chart
2009 2010 2011
J A S O N D J A J A S O N D S O N D J F M A M J J A S O N D
Literature review
Problem
identification
Development of the
experimental rig
Development of the
electromagnetic
shaker
System
Identification of the
system
AVC controller
development
(simulation)
Implementation of
AVC controller
Test & verification
Evaluation of the
performance of the
algorithm on the
experimental rig
Report writing

11
1.8 Summary
Background and statement of the problem in this research has been discussed and
considered. The outcomes of this research are including a complete research on the
system identification of the plate structure using conventional parametric modeling
techniques as known as Recursive Least Square (RLS), development and experimental
validation of the Active Vibration Control Strategy for vibration suppression of the
flexible plate system.

130
REFERENCE
1. A. Madkour, M. A. Hossain, K. P. Dahal, and H. Yu, Intelligent Learning
Algorithmn for Active Vibration Control, IEEE Transactions on Systems, Man
and Cybernetics, Vol.37, No.5, September 2007, pages 1022-1033.
2. A. As’arry Experimental Analysis of Human Like Hand Tremor Behaviour,
Universiti Teknologi Malaysia, Master’s Degree Thesis, 2009,
3. A. Jnifene, Active vibration control of flexible structure using delayed position
feedback, Systems and Control Letters 56, 2007, pages 215-222.
4. A. H. El-Sinawi, Active vibration isolation of a flexible structure mounted on a
vibrating elastic base, Journal of Sound and Vibration 271, 2004, pages 323-
337.
5. A. Mukherjee, S. P. Joshi, A. Ganguli, Active vibration control of
piezolaminated stiffened plates, Composite structures 55, 2002, pages 435-443.
6. A. Cavallo, G. De Maria, C. Natale, S. Pirozzi, Robust control of flexible
structures with stable bandpass controllers, Automatica 44, 2008, pages 1251-
1260.
7. A. R. Tavakolpour, I. Z. Mat Darus, and M. Mailah, Performance Evaluation of
Finite Difference and Finite Element Methods Applied to Flexible Thin Plate
for Active Vibration Control, Universiti Teknologi Malaysia, 10th
, WSEAS Int.
Conf. on Automatic Control, Modelling & Simulation (ACMOS’08), Istanbul,
Turkey, May 2008.
8. Basic Electronics 8th
Edition, Mc Graw Hill, Glencoe, page 362.
9. B. J. G. Vautier and S. O. R Moheimani, Charge driven piezoelectric actuators
for structural vibration control: issues and implementation, School of Electrical
and Computer Science, The University of Newcastle, Australia, June 2005.
10. Basic electronics 8th
edition, Mc Graw Hill, Glencoe, page 372.

131
11. D. N. Kumar, S Raja, and T. Ikeda, Active vibration control of smart plates
with partially debonded multilayered actuators, Smart material and structures
16, 2007, pages 1584-1594.
12. D. Mayer, H. Atzrodt, S. Herold, and M. Thomaier, An Approach for the model
based monitoring of piezoelectric actuators, II ECCOMAS THEMATIC
conference on smart structure and materials, 2005, pages 18-21.
13. E. L. Colla, Piezoelectric technology for active vibration control, 2009.
14. F. A. C. Viana and V. Steffen, Multimodal Vibration Damping through
Piezoelectric Patches and Optimal Resonant Shunt Circuits, School of
Mechanical Engineering, Federal University of Uberlândia, July-September
2006, Vol. XXVIII, No. 3, pages 293-310.
15. G. Buzdugan, E. Mihailecu, M. Rades, strength of materials Vibration
measurement, chair polytechnic institute of bucharesl, Romania, 1986, page
192.
16. G. Caruso, S. Galeani, L. Menini, Active vibration control of an elastic plate
using multiple piezoelectric sensors and actuators, Simulation modeling
practice and theory II, 2003, pages 403-419.
17. Http://en.wikipedia.org/wiki/American_wire_gauge
18. Http://en.wikipedia.org/wiki/Electromagnet
19. Http://www.coolmagnetman.com/magelect.htm, 6 November 2009.
20. Http://www.coolmagnetman.com/magelect.htm, 6 November 2009.
21. Http://en.wikipedia.org/wiki/American_wire_gauge, 23 April 2010.
22. Http://en.wikipedia.org/wiki/Electromagnet, 2 January 2010.
23. I. Z. Mat Darus, and M. O. Tokhi, “Soft computing-based active vibration
control of a flexible structure,” Eng. Appl. Artif. Intell., Vol. 18, pages 93-114,
2004.
24. I. Z. Mat Darus and M. O. Tokhi, Soft computing-based active vibration control
of flexible structure, Engineering Applications of Artificial Intelligence, 2004,
pages 93-114.
25. I. Z. Mat Darus, F. M. Aldebrez, and M. O. Tokhi, Parametric Proceedings of
Modeling of a Twin Rotor System Using Genetic Algorithm, the 1st IEEE
International Symposium on Control, Communications and Signal Processing,
ISCCSP 2004, Hammamet, Tunisia, 21 - 24 March 2004.

132
26. C. D. Johnson, “Design of Passive Damping Systems”, Journal of Vibration
and Acoustics Vol. 117, Special 50th Anniversary Design Issue, 1995, pages
171-176 .
27. I. Z. Mat Darus and M.O. Tokhi, Finite difference simulation of a flexible plate,
journal of low frequency noise, vibration and active control, 2003.
28. J. Lin, A vibration absorber of smart material structures using adaptive
networks in hierarchical fuzzy control, Ching Yun University, 2004.
29. L. Zhou and W. X. Zheng, Moving Least Square Ritz Method for vibration
analysis of plates, Journal of sound and vibration, article in press, 2004.
30. Laser Displacement Sensor Data Sheet, from
http://www.clrwtr.com/PDF/SUNX/SUNX-LM10-Micro-Laser-Displacement-
Sensors.pdf.
31. LabVIEW 8.6 Data Sheet, from ftp://ftp.ni.com/pub/devzone/pdf/tut_7336.pdf.
32. M. A. Hosain, Digital signal processing and parallel processing for real-time
adaptive noise and vibration control, Ph.D. Thesis, Department of Automatic
Control and Systems Eningineering. The University of Sheffield, Sheffield,
UK, 1995.
33. M. O. Tokhi, and R. Wood, Active noise control using multi-layered perceptron
neural networks. International Journal of Low Frequency Noise, Vibration and
Active Control 16 (2), 1997, pages 109-144.
34. M. K. Kwak and S. Heo, Active vibration control of smart grid structure by
multiinput and multioutput positive position feedback controller, Dongguk
University, journal sound and vibration, 2007, pages 230-245.
35. M. O. Tokhi and R. R. Leitch, Design and Implementation of Self-tuning
Active Noise Control Systems, IEE proceedings-D, Vol.138, No.5, September
1991, pages 421-430.
36. M. J. Brennan, M. J. Day, Royal Naval Engineering College, UK, S. J. Elliot,
R. J. Pinnington, University of Southampton, UK, Piezoelectric actuators and
sensors, The active control of vibration, page 263-274.
37. NI CompactDAQ and Module data sheet, http://www.ni.com/,2010.
38. P. Gaudenzi, R. Carbonaro and E. Benzi, Control of vibrations by means of
piezoelectric devices: theory and experiments, Composite Structure, 2000,
pages 373-379.

133
39. Piezo film sensor technical manual, Measurement Specialties, Inc.,
www.msiusa.com, pages 31.
40. PZ211E User Manual, E-835 Piezo Driver Module, Physik Instrument (PI)
GmbH & Co. KG, 2008-07-24.
41. P. E. Wellstead and M. B. Zarrop, Self-tuning Systems, Control and Signal
Processing, 1991, John Wiley & Sons Ltd, England.
42. R. Ismail, A. Y. Ismail, I. Z. Mat Darus, Identification algorithms of flexible
structure using neural networks, Student conference on research and
development ,June 2006, pages 162-168.
43. R. Changhai and S. Lining, Hysteresis and creep compensation for piezoelectric
actuator in open-loop operation, Robot Research Institute, Harbin Institute of
Technology, china, 23 May 2005.
44. R. Changhai, S. Lining and K. Wang, An adaptive inverse method of control
for a piezoelectric actuator, (Automation College, Harbin Engineering
University and Robotics Institute, Harbin Institute of Technology, Harbin,
China), 9 January 2006.
45. R. Changhai and S. Lining, A new open-loop driving method of piezoelectric
actuator for periodic reference inputs, Automation College, Harbin Engineering
University and Robotics Institute, Harbin Institute of Technology, Harbin,
China, 12 June 2006.
46. S. Z. Mohd Hashim, M. O. Tokhi and I. Z. Mat Darus, Active Vibration
Control of Flexible Structures using Genetic Optimisation, Journal of Low
Frequency Noise, Vibration and Active Control, Vol.25, N0.3, 2006, Pages
195-207.
47. T. Pumhossel and H. Springer, Active Damping of Vibrations of Lightweight
Beam Structure – Experimental Results, Motion and vibration control, 2009
pages 253-262.
48. T. C. Siong, Further development of a miniature vibration shaker, Universiti
Teknologi Malaysia, Undergraduate Thesis, 2006.
49. W. P. Spilman, The evolution of smart structure and materials, Proceedings of
the 1st European Conference on Smart Structures and Materials, 12-14 May
1992, Pages 97-113.
50. X. P. Qing, H. L. Chan, S. J. Beard, T. K. Ooi, S. A. Marotta, Effect of
adhesive on the performance of piezoelectric elements used to monitor

134
structural health, International journal of adhesion & adhesive 26, 2006, page
622-628.
51. Y. Yaman, T. Caliskan, V. Nalbantoglu, E. Prasad and D. Waechter, Active
vibration control of smart plate, ICAS, 2002.
52. Z. C. Qiu, X. M. Zhang, H. X. Wu and H. H. Zhang, Optimal placement and
active vibration control for piezoelectric smart flexible cantilever plate, Journal
of sound and vibration, 2007, page 521-543.
53. Z. C. Qiu, J. D. Han, X. M. Zhang, Y. C. Wang and Z. W. Wu, Active vibration
control of a flexible beam using a non-collocated acceleration sensor and
piezoelectric patch actuator, Journal of sound and vibration, 2009, pages 438-
455.

135
PUBLICATIONS
1. 4th Asia International Conference on Mathematical Modelling &
Computer Simulation, (26-28 May 2010 Kota Kinabalu, Sabah, Borneo
Island, Malaysia) Development of a Flexible Plate Structure Rig for
Implementation of Active Vibration Control Algorithm M.F.Jamid, I.Z.
Mat Darus.
2. 4th Asia International Conference on Mathematical Modelling &
Computer Simulation, (26-28 May 2010 Kota Kinabalu, Sabah, Borneo
Island, Malaysia) Neuro-Modelling of Flexible Plate Structure Rig for
Active Vibration Control Algorithm, I. Z. Mat Darus, A.A.M.Al-Khafaji
and M.F.Jamid.
3. 1st International Conference on (Energy, Power and Control)(30
November 2010 Basra, Iraq), ANFIS Modelling of Flexible Plate
Structure, I. Z. Mat Darus, A.A.M.Al-Khafaji and M.F.Jamid.