Embed Size (px)
Citation preview

Active Uncertainty Compensation Based Control
With Applications to Energy Systems
Kwang Y. Lee
Professor and Chair
Department of Electrical & Computer Engineering
May 2019
Content
2
Background
Theoretical development
Experimental Applications
Conclusions

Motion Control
Problem Formulation
Process control
Target Tracking
Accurate model
Strong Nonlinearity
Stable Operation
Modelling Error
Time-delay
Energy Control
Objectives
Frequent Load Tracking
Disturbance Rejection
Difficulties
Dynamic Nonlinearity
Modelling Uncertainty
Various Disturbances
Intractable Dynamics
Time-delay
Non-minimum phase
Multivariable couplings
4
Background
?

4
Insights on Uncertainty
“If there is no uncertainty in the system, the control or the environment,
feedback control is largely unnecessary.”
BROCKETT, R. New issues in the mathematics. Berlin: Springer, 2001: 189 – 220.
H. S. Tsien. Engineering Cybernetics. New York: McGraw-Hill,1954.
Åström K J, Kumar P R. Control: A perspective[J]. Automatica, 2014, 50(1): 3-43.
Background
Tsien questions the basic assumption of the modern control theory
that ‘the properties and characteristics of the system to be controlled
were always assumed to be known’ and points out that, in reality,
‘large unpredictable variations of the system properties may occur.’
“In fact, robustness to model uncertainty was broadly one of
the major shortcomings of early model-based state-space theories.
That this was true even in adaptive control.”
5
State-of-the-art of the uncertainty compensation methods
Method Time Author Model Used Limitation
2DOF-PID 1985 M. Araki, et al
First Order
Plus Dead
time model
Any
Process
Disturbance
Observer1987
K. Ohnishi, et
al.
Transfer
Function
Model
Single-loop
Process
Active
Disturbance
Rejection
Control
1998 Han, J.QCascaded
Integrators
Minimum-
phase
Uncertainty
and
disturbance
Estimator
2004Zhong, QC
and Rees
State Space
model
Stable
processes
Background
Active
Passive
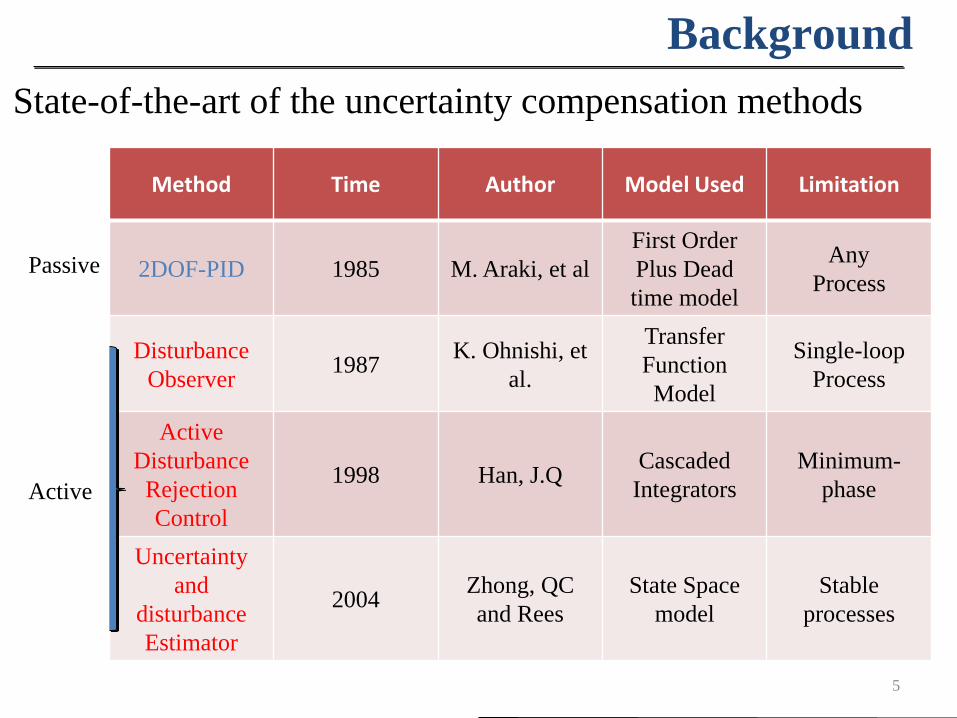
Active Uncertainty Compensation Based Control (AUCBC)
Energy Uncertainties
Multi-Source Disturbances
Modelling Inaccuracy
Nonlinearity
Uncertainty: the dynamics beyond the nominal linear model
Set-point Tracking
7
Background
Renewable Intermittency Frequent load changes Parameter perturbation Uncertain dynamics Fuel variation Heat transfer deterioration ……………………
Uncertainty
Estimation
Uncertainty Compensation
Basic idea

Content
7
Background
Theoretical development
Experimental Applications
Conclusions

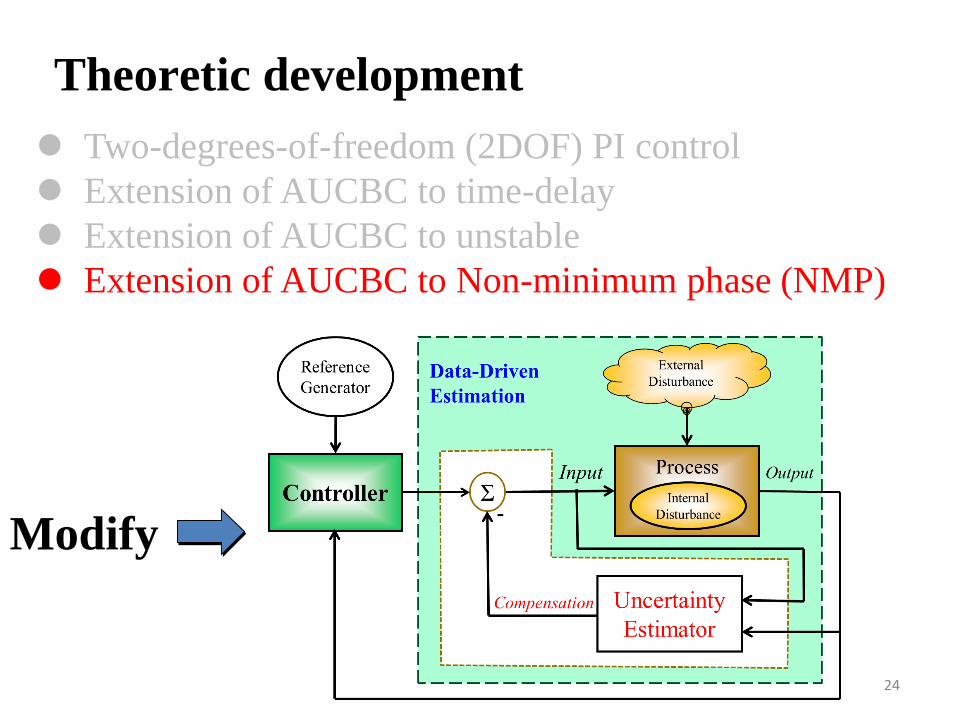
Theoretical development
8
Two-degrees-of-freedom (2DOF) PI control
Extension of AUCBC to time-delay
Extension of AUCBC to unstable system
Extension of AUCBC to non-minimum phase
Extension of AUCBC to multivariable processes
9
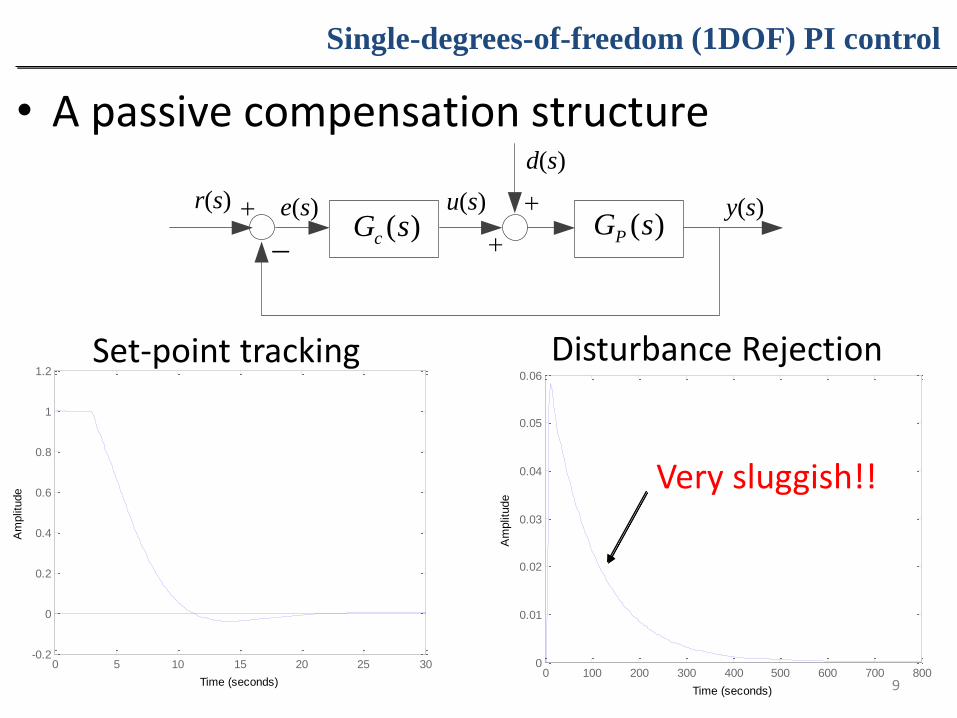
Disturbance RejectionSet-point tracking
u(s) y(s)( )PG s( )cG s
d(s)
r(s) e(s)
0 5 10 15 20 25 30-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (seconds)
Am
plit
ude
0 100 200 300 400 500 600 700 8000
0.01
0.02
0.03
0.04
0.05
0.06Step Response
Time (seconds)
Am
plit
ude
Single-degrees-of-freedom (1DOF) PI control
• A passive compensation structure
Very sluggish!!
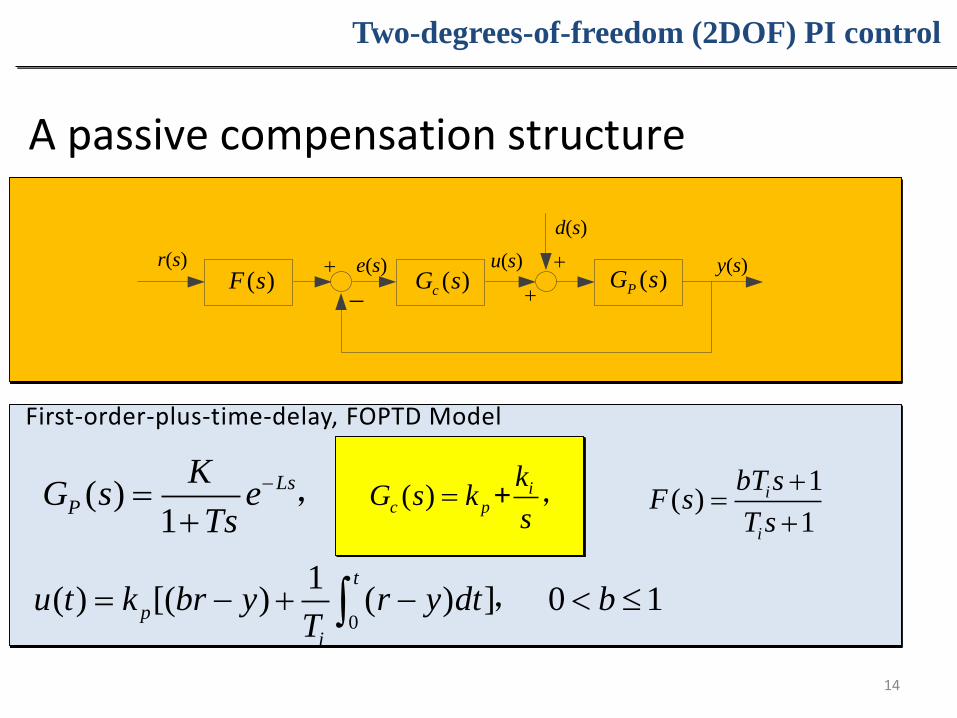
A passive compensation structure
14
Two-degrees-of-freedom (2DOF) PI control
First-order-plus-time-delay, FOPTD Model
( )1
Ls
P
KG s e
Ts
,
0
1( ) [( ) ( ) ] 0 1
t
p
i
u t k br y r y dt bT
,
u(s) y(s)( )PG s( )cG s
d(s)
( )F s
r(s) e(s)
( ) ic p
kG s k
s + ,
1( )
1
i
i
bT sF s
T s
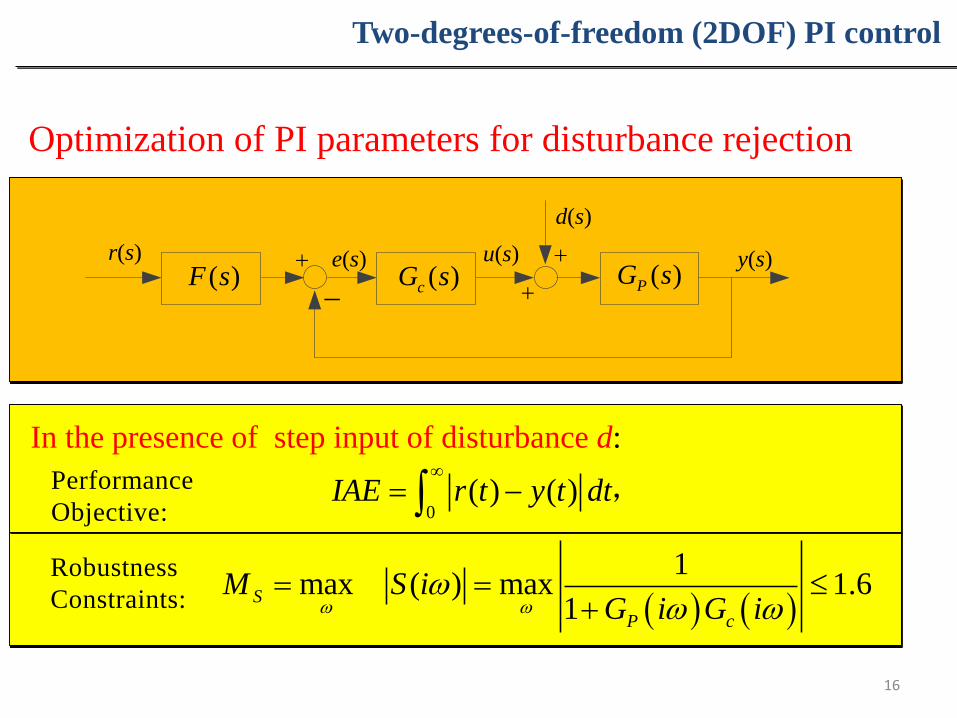
Optimization of PI parameters for disturbance rejection
16
Performance
Objective:
u(s) y(s)( )PG s( )cG s
d(s)
( )F s
r(s) e(s)
1
max ( ) max 1.61
S
P c
M S iG i G i
0( ) ( )IAE r t y t dt
,
Robustness
Constraints:
In the presence of step input of disturbance d:
Two-degrees-of-freedom (2DOF) PI control
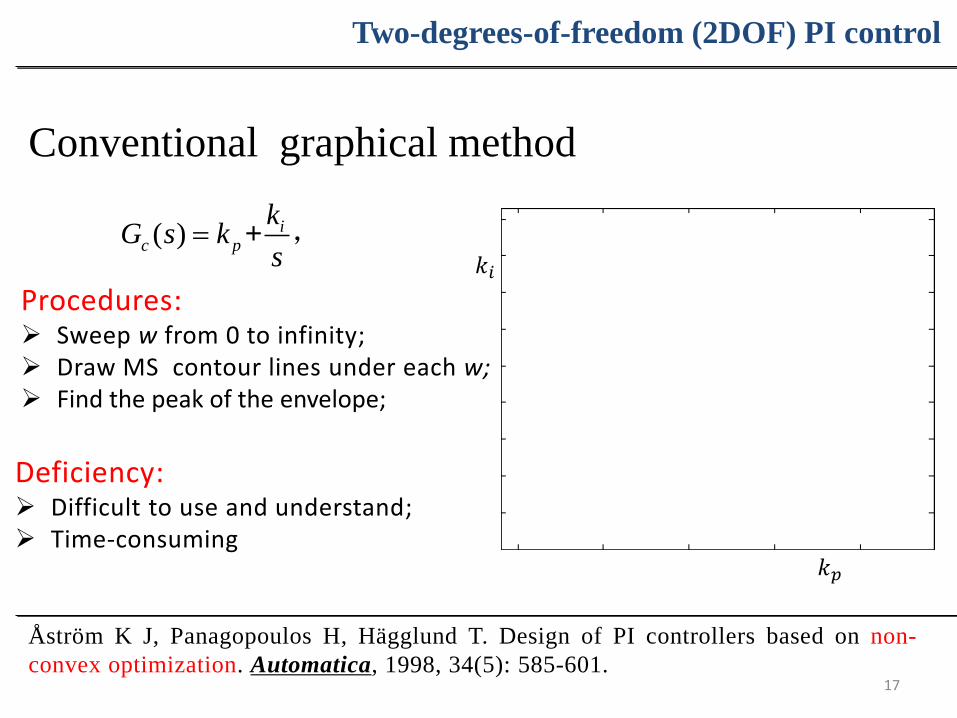
Conventional graphical method
17
Åström K J, Panagopoulos H, Hägglund T. Design of PI controllers based on non-
convex optimization. Automatica, 1998, 34(5): 585-601.
( ) ic p
kG s k
s + ,
Procedures: Sweep w from 0 to infinity; Draw MS contour lines under each w; Find the peak of the envelope;
𝑘𝑝
𝑘𝑖
Two-degrees-of-freedom (2DOF) PI control
Deficiency: Difficult to use and understand; Time-consuming
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Re
Im
m
Cgc
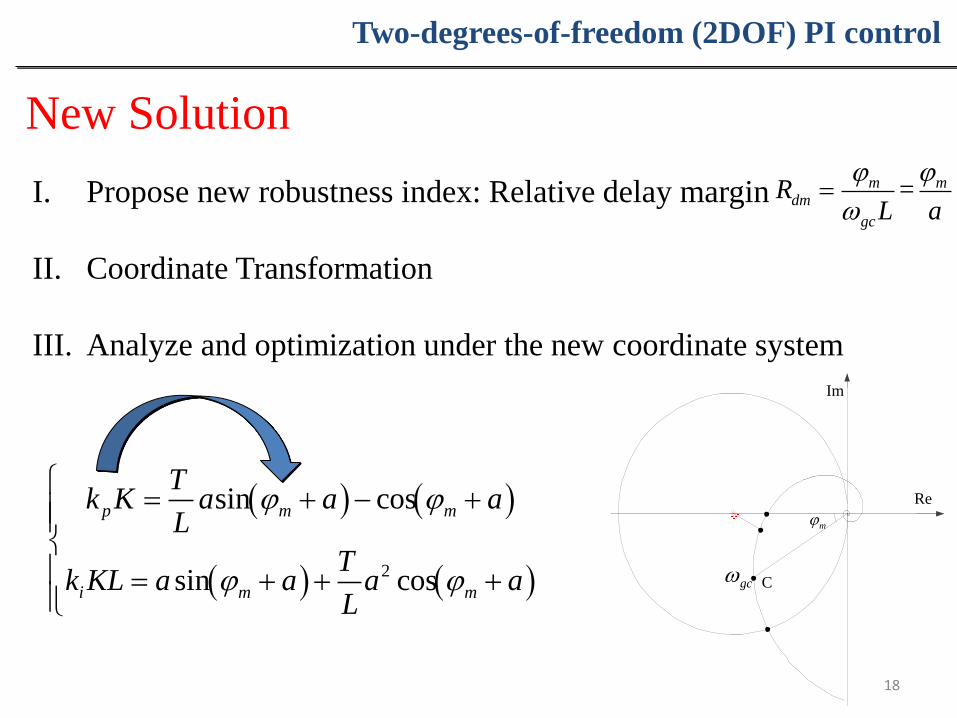
New Solution
18
I. Propose new robustness index: Relative delay margin
II. Coordinate Transformation
III. Analyze and optimization under the new coordinate system
=m mdm
gc
RL a
2
sin cos
sin cos
p m m
i m m
Tk K a a a
L
Tk KL a a a a
L
Two-degrees-of-freedom (2DOF) PI control
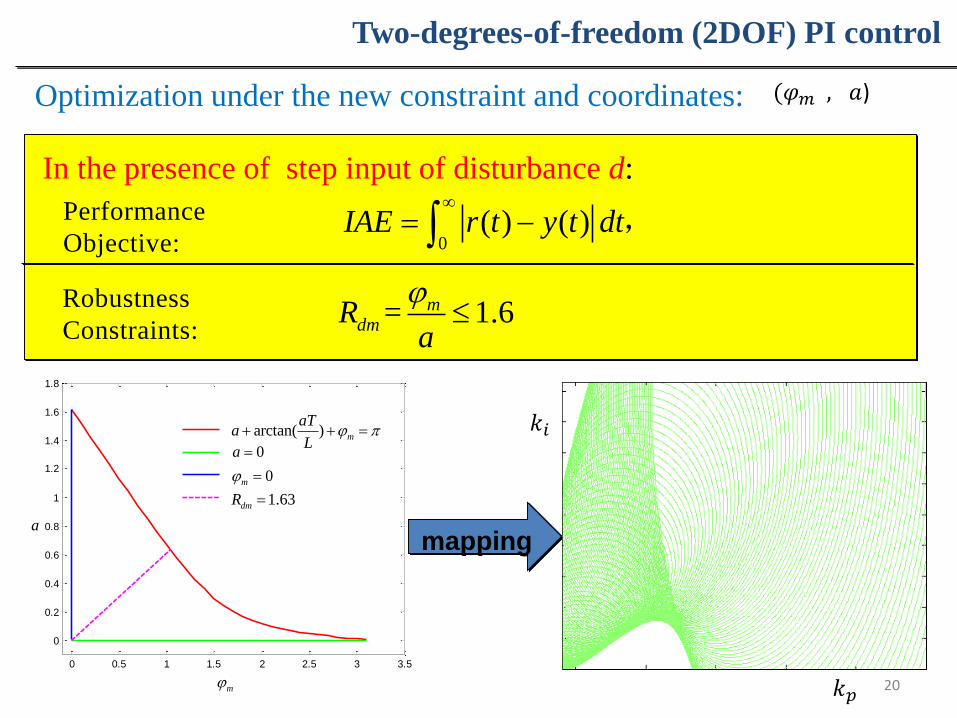
20
(𝜑𝑚 , 𝑎)
0 0.5 1 1.5 2 2.5 3 3.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
m
a
0m
1.63dmR
0a
arctan( ) m
aTa
L
mapping
Performance
Objective: 0( ) ( )IAE r t y t dt
,
Robustness
Constraints:
In the presence of step input of disturbance d:
= 1.6mdmR
a
Two-degrees-of-freedom (2DOF) PI control
Optimization under the new constraint and coordinates:
𝑘𝑝
𝑘𝑖
21
2sin ( 1) cos ( 1) 0dm dm
d Ta r a a r a
da L
Analytical solution: Lagrange multiplier method
(𝜑𝑚 , 𝑎)
Performance
Objective: 0( ) ( )IAE r t y t dt
,
Robustness
Constraints:
In the presence of step input of disturbance d:
= 1.6mdmR
a
Two-degrees-of-freedom (2DOF) PI control
Optimization under the new constraint and coordinates:
Li Sun, Donghai Li, and Kwang Y. Lee. Optimal Disturbance Rejection for PI
controller with Constraints on Relative Delay Margin. ISA Transactions, 2016, 63:
103-111.
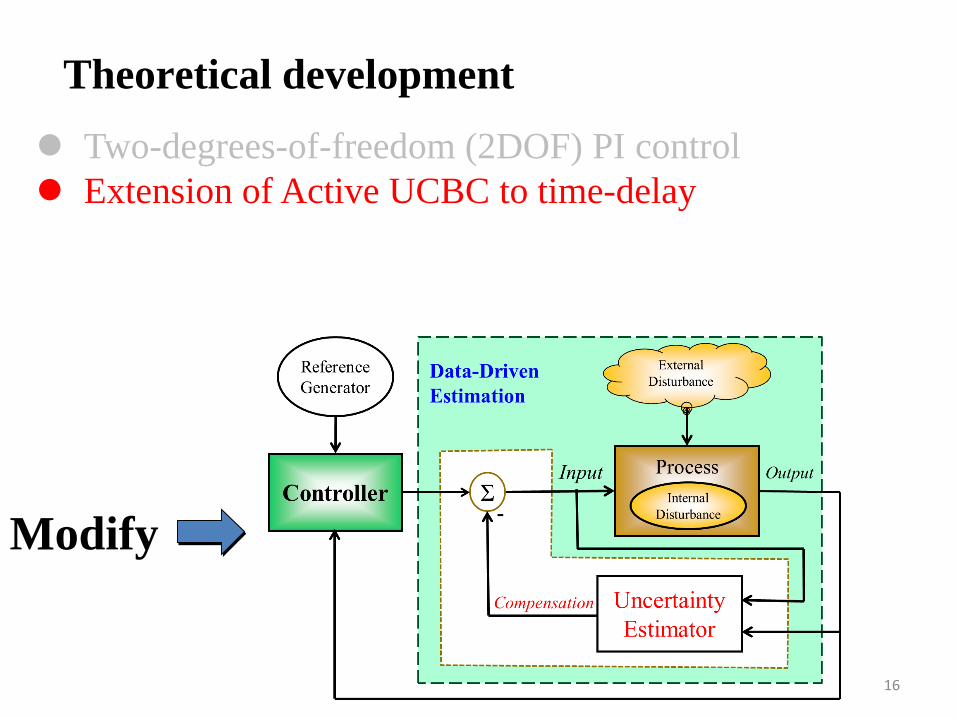
Theoretical development
16
Two-degrees-of-freedom (2DOF) PI control
Extension of Active UCBC to time-delay
Modify
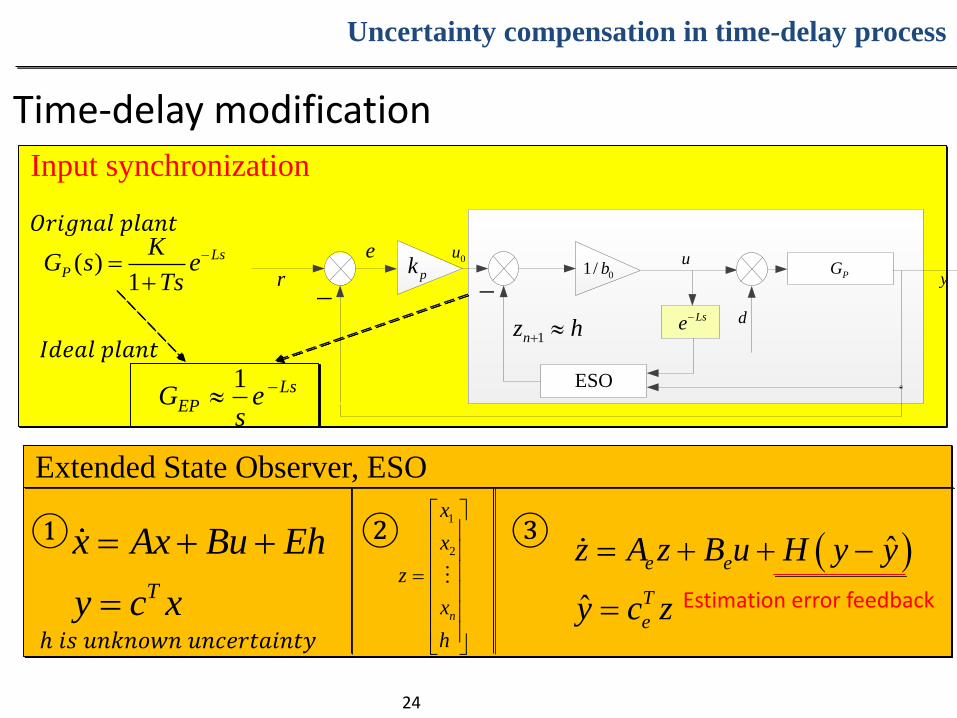
Time-delay modification
pk01/ b
y
ESO
e 0u
1nz h
u
r
d
PG
Lse
1 LsEP e
sG
24
Input synchronization
( )1
Ls
P
KG s e
Ts
𝑂𝑟𝑖𝑔𝑛𝑎𝑙 𝑝𝑙𝑎𝑛𝑡
Uncertainty compensation in time-delay process
𝐼𝑑𝑒𝑎𝑙 𝑝𝑙𝑎𝑛𝑡
Extended State Observer, ESO
T
x Ax Bu Eh
y c x
1
2
n
x
x
z
x
h
ˆ
ˆ
e e
T
e
z A z B u H y y
y c z
① ② ③
ℎ 𝑖𝑠 𝑢𝑛𝑘𝑛𝑜𝑤𝑛 𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦
Estimation error feedback
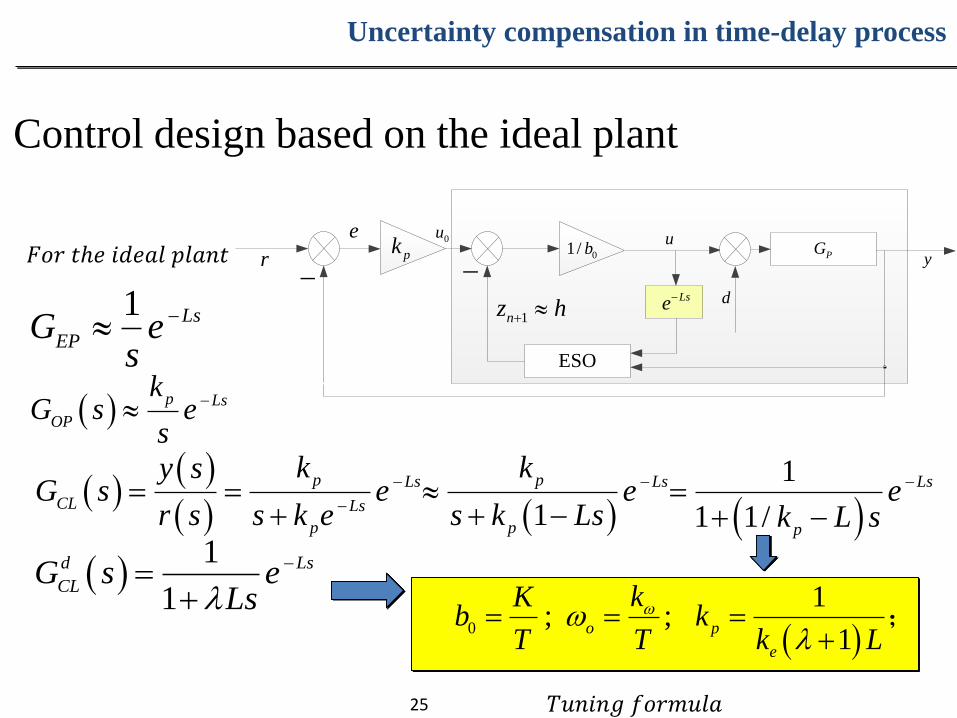
Control design based on the ideal plant
1 Ls
EPe
sG
0; ;
1
1p
e
ok
k
kKb
T LT
;
25
1 1 1/
1p p
p
Ls Ls Ls
CL
pp
Ls
y sG s
r s s s
k ke e e
k e Ls k L sk
pk01/ b
y
ESO
e 0u
1nz h
u
r
d
PG
Lse
𝐹𝑜𝑟 𝑡ℎ𝑒 𝑖𝑑𝑒𝑎𝑙 𝑝𝑙𝑎𝑛𝑡
p Ls
OPG
ke
ss
1
1d Ls
CLeG s
Ls
Uncertainty compensation in time-delay process
𝑇𝑢𝑛𝑖𝑛𝑔 𝑓𝑜𝑟𝑚𝑢𝑙𝑎
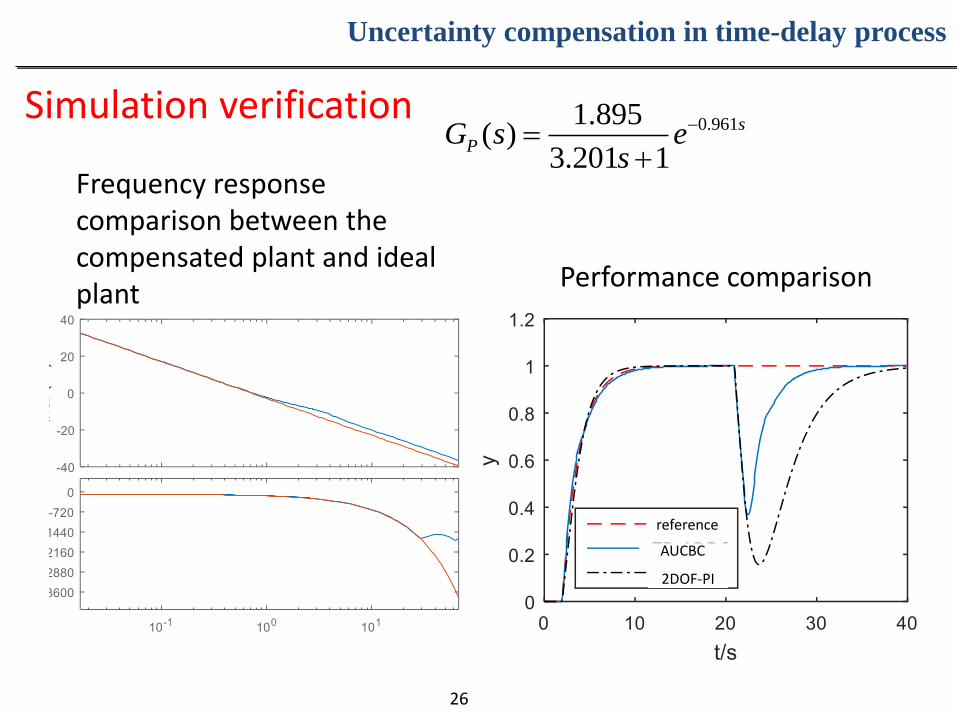
Simulation verification0.9611.895
( )3.201 1
s
PG s es
Frequency response comparison between the compensated plant and ideal plant
Performance comparison
26
理想对象
2DOF-PI
Uncertainty compensation in time-delay process
reference
AUCBC

Theoretical development
20
Two-degrees-of-freedom (2DOF) PI control
Extension of AUCBC to time-delay
Extension of AUCBC to unstable system
Modify

Modified Uncertainty and Disturbance Estimator
28
Uncertainty compensationstate feedback feedback stablization
U( ) ( ) UDEm ms eB A X B C AX B EK
( + ) ( ) ( )u t L d t x A F x BSystem model
Control law
Uncertainty compensation in unstable process
: ( , ) A B : ( , ) A + F B
( ) ( )+B A I fs G s( )+
B B fG s
UDEtd
c B+Bm
xvVirtual Plant
B+Ke
-yv
uSF
uFB
u x
External disturbance
Controlled Process
d
m
B A A
se
se
Artificial
Delay
Artificial Delay
Lse
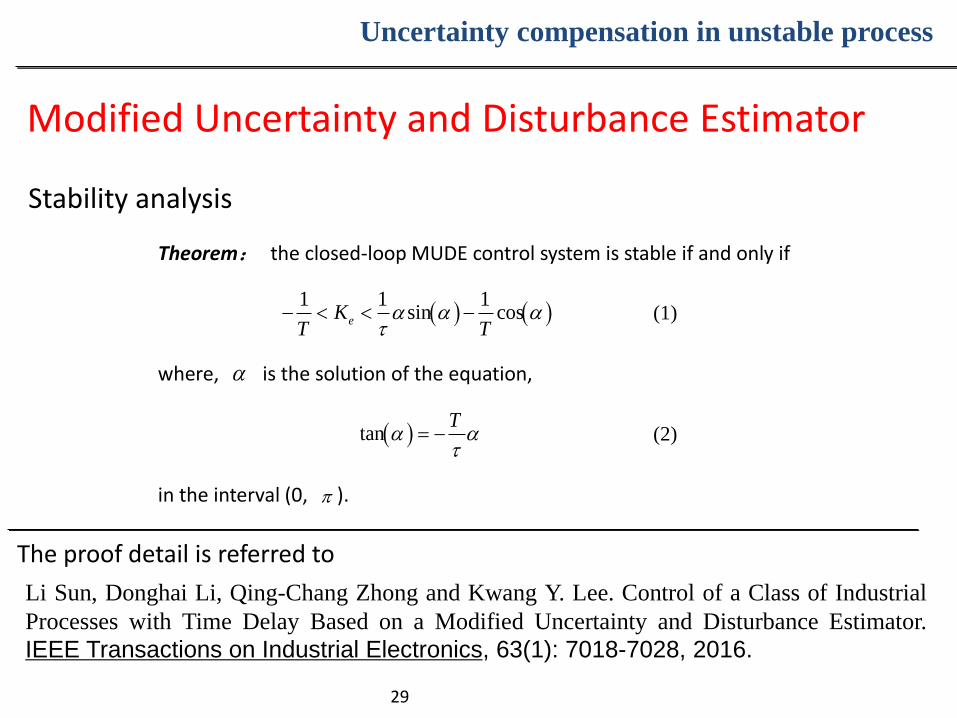
Stability analysis
29
Modified Uncertainty and Disturbance Estimator
Uncertainty compensation in unstable process
Theorem: the closed-loop MUDE control system is stable if and only if
si1
n cos1 1
eKT T
(1)
where, is the solution of the equation,
tanT
(2)
in the interval (0, ).
The proof detail is referred to
Li Sun, Donghai Li, Qing-Chang Zhong and Kwang Y. Lee. Control of a Class of Industrial
Processes with Time Delay Based on a Modified Uncertainty and Disturbance Estimator.
IEEE Transactions on Industrial Electronics, 63(1): 7018-7028, 2016.
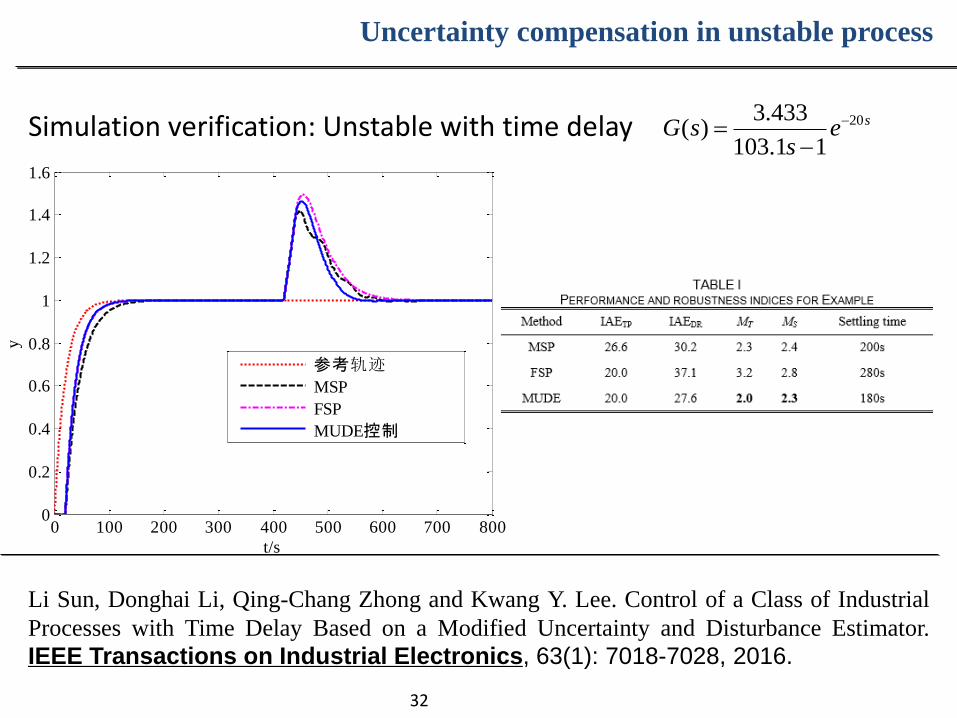
Simulation verification: Unstable with time delay 203.433( )
103.1 1
sG s es
0 100 200 300 400 500 600 700 8000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t/s
y
参考轨迹
MSP
FSP
MUDE控制
32
Li Sun, Donghai Li, Qing-Chang Zhong and Kwang Y. Lee. Control of a Class of Industrial
Processes with Time Delay Based on a Modified Uncertainty and Disturbance Estimator.
IEEE Transactions on Industrial Electronics, 63(1): 7018-7028, 2016.
Uncertainty compensation in unstable process
Theoretic development
24
Two-degrees-of-freedom (2DOF) PI control
Extension of AUCBC to time-delay
Extension of AUCBC to unstable
Extension of AUCBC to Non-minimum phase (NMP)
Modify
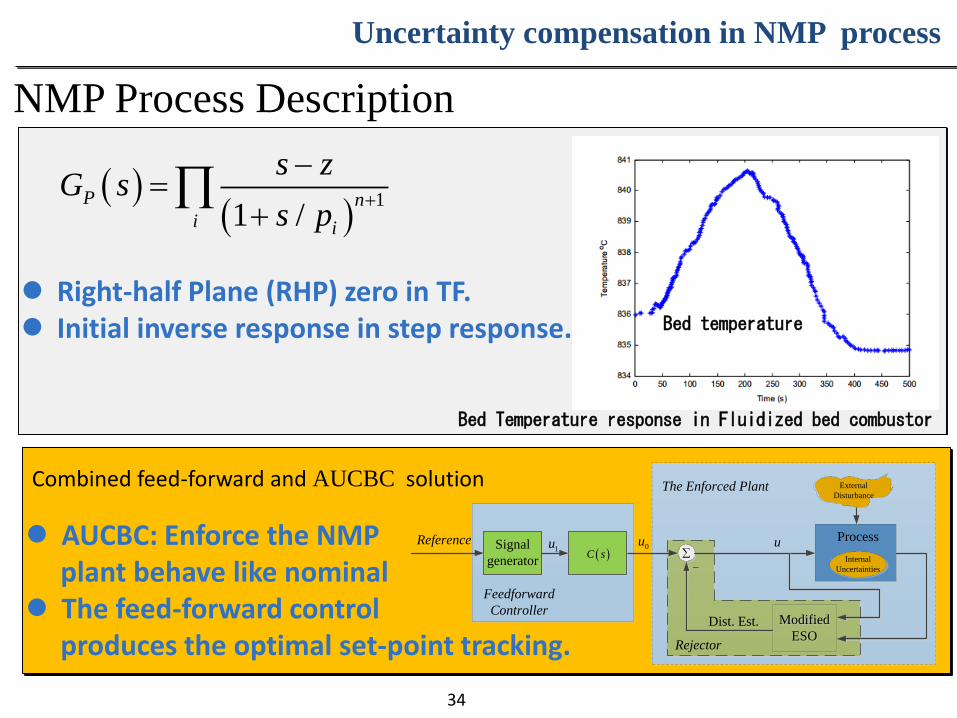
NMP Process Description
Right-half Plane (RHP) zero in TF. Initial inverse response in step response.
Bed Temperature response in Fluidized bed combustor
34
Bed temperature
11 /
P ni i
s zG s
s p
Uncertainty compensation in NMP process
Combined feed-forward and AUCBC solution
Process
Internal
Uncertainties
External
Disturbance
Modified
ESO
Modified
ESO
Dist. Est.
The Enforced Plant
Rejector
C sSignal
generator
Reference
Feedforward
Controller
0u u1u AUCBC: Enforce the NMP
plant behave like nominal The feed-forward control
produces the optimal set-point tracking.
35
0
0 1
1
1
1 , [ , )
, [ , )
z t t
use ra t t tu t
r t t
1 0
ln 1/ 1usat t
z
ˆ ˆ ˆ
ˆ ˆ
e e
T
e
x A x B u H y y
y c x
1
2
0 1 1
0 1
, , 1 0 00 1
T
o o o
n n
A B c
a a a
, ,0 0
0
o o o
e e
T T
e o
A B B
c c
A B
0
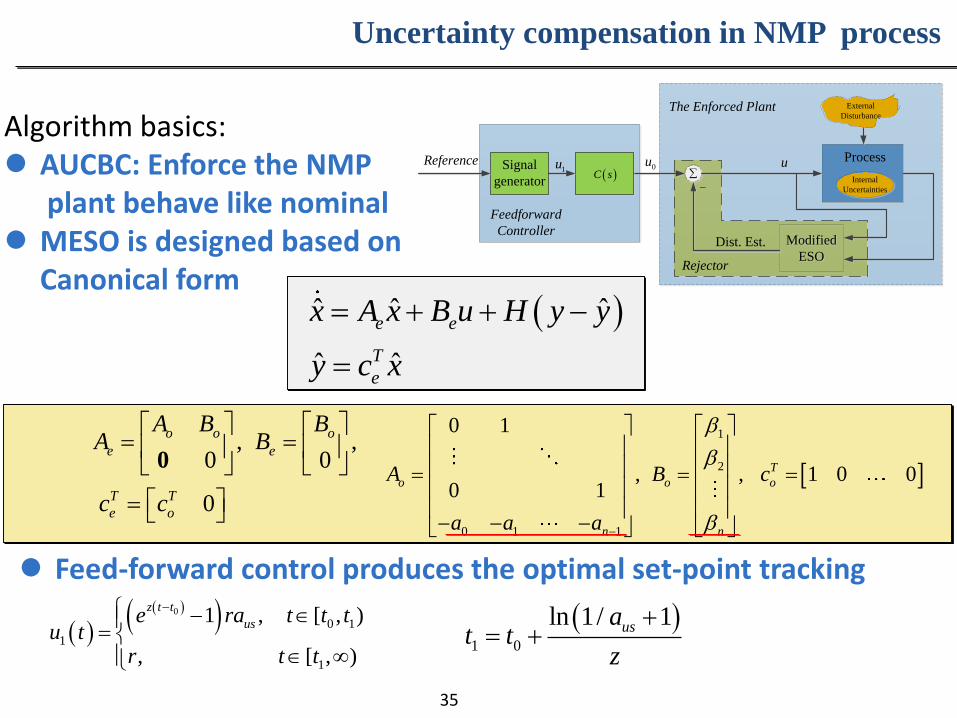
Feed-forward control produces the optimal set-point tracking
Algorithm basics: AUCBC: Enforce the NMP
plant behave like nominal MESO is designed based on
Canonical form
Uncertainty compensation in NMP process
Process
Internal
Uncertainties
External
Disturbance
Modified
ESO
Modified
ESO
Dist. Est.
The Enforced Plant
Rejector
C sSignal
generator
Reference
Feedforward
Controller
0u u1u
36
Uncertainty compensation in NMP process
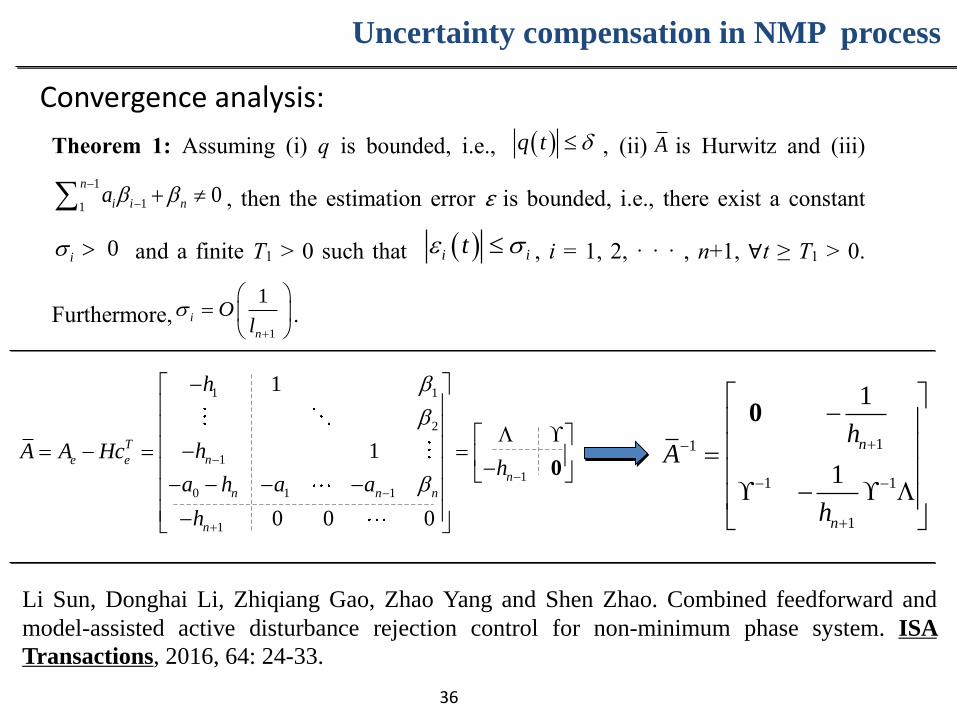
Convergence analysis:
Theorem 1: Assuming (i) q is bounded, i.e., q t , (ii) A is Hurwitz and (iii)
1
110
n
i i na
, then the estimation error ε is bounded, i.e., there exist a constant
0 i and a finite T1 > 0 such that i it , i = 1, 2, · · · , n+1, ∀t ≥ T1 > 0.
Furthermore,1
1i
n
Ol
.
1 1
2
1
1
0 1 1
1
1
1
0 0 0
0
T
ne e
n
n n n
n
h
hA A Hch
a h a a
h
11
1 1
1
1
1
0n
n
hA
h
Li Sun, Donghai Li, Zhiqiang Gao, Zhao Yang and Shen Zhao. Combined feedforward and
model-assisted active disturbance rejection control for non-minimum phase system. ISA
Transactions, 2016, 64: 24-33.

4
'
2
123.853 10 3.5
6.5 42.25 45 190
sG s
s s s s
2
144.86 3
6.5 42.25
sG s
s s
38
Simulation verification
Uncertainty compensation in NMP process
Actual plant Nominal model
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Outp
ut
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
Contr
ol
Time (sec)
Reference
MADRC [G(s)]
MADRC [G'(s)]
DOBC [G'(s)]

Theoretical development
29
Two-degrees-of-freedom (2DOF) PI control
Extension of AUCBC to time-delay
Extension of AUCBC to unstable
Extension of AUCBC to Non-minimum phase (NMP)
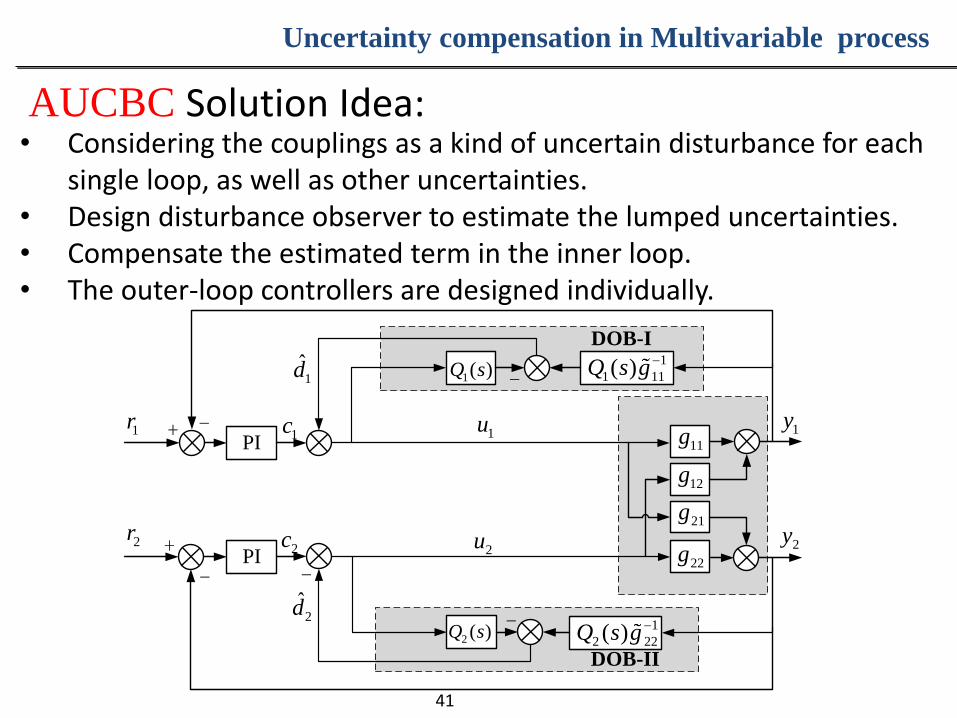
Extension of AUCBC to Multivariable process
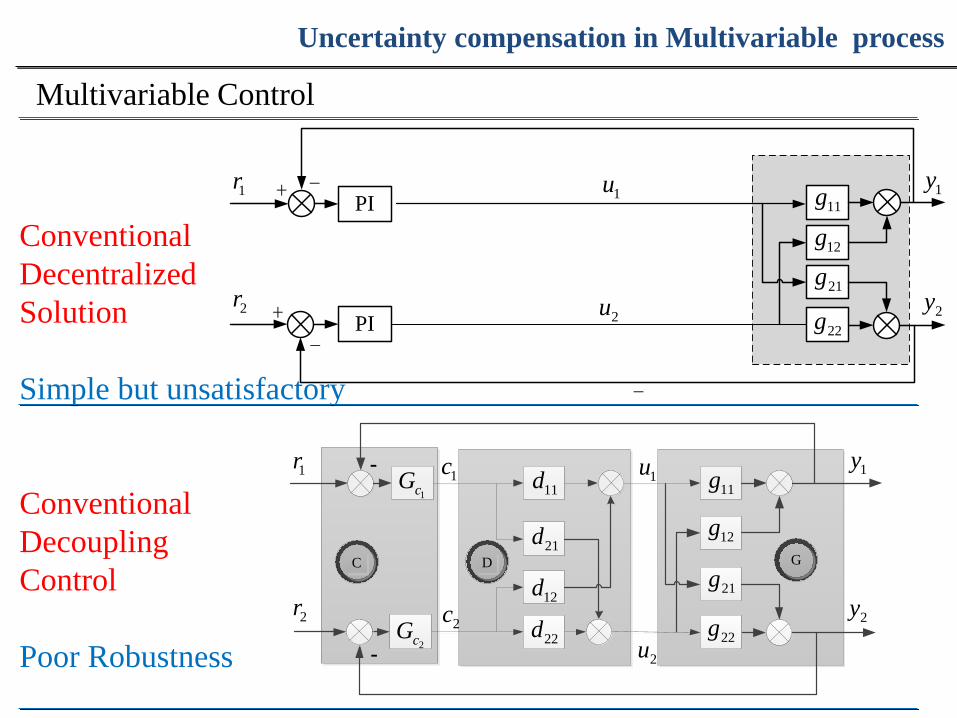
Multivariable Control
+
+
-
-
-
PI
11g
12g
22g
21g
1y
2y
1r
2r
PI1u
2u
Uncertainty compensation in Multivariable process
Conventional
Decentralized
Solution
Simple but unsatisfactory
-
-
11g
12g
22g
21g
1c
2c
1y
2y
1r
2r
1u
2u
GGDGC
1cG
2cG
11d
21d
12d
22d
Conventional
Decoupling
Control
Poor Robustness
+
+
-
-
-
PI-
11g
12g
22g
21g
2c
1y
2y
1r
2r
1( )Q s1
1 11( )Q s g
PI1c
2 ( )Q s 1
2 22( )Q s g
1u
2u
-
DOB-I
DOB-II
1d̂
2d̂
41
• Considering the couplings as a kind of uncertain disturbance for each single loop, as well as other uncertainties.
• Design disturbance observer to estimate the lumped uncertainties.• Compensate the estimated term in the inner loop. • The outer-loop controllers are designed individually.
Uncertainty compensation in Multivariable process
AUCBC Solution Idea:
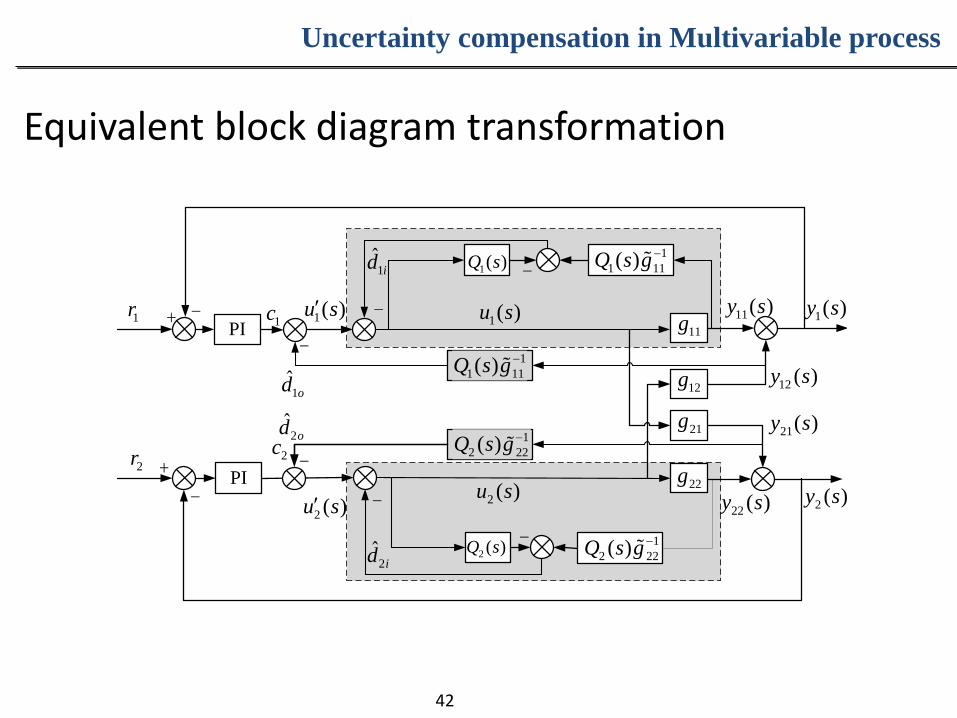
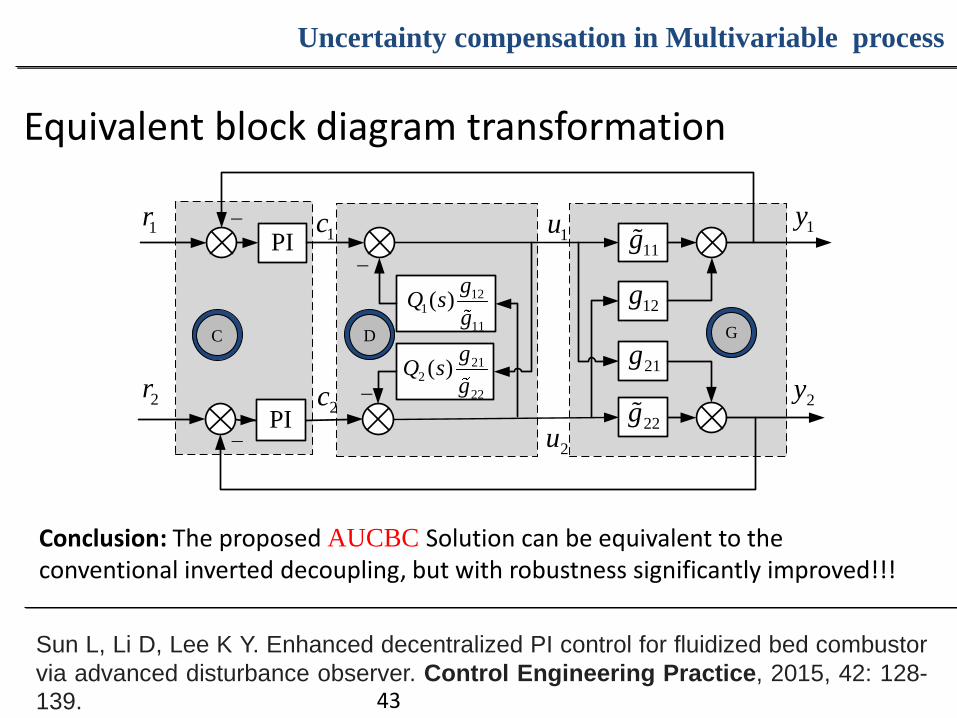
Equivalent block diagram transformation
+
+
-
-
-
PI
-
11g
12g
22g
21g
2c
1( )y s
2 ( )y s
1r
2r
1( )Q s1
1 11( )Q s g
PI1c
2 ( )Q s 1
2 22( )Q s g
1( )u s
2 ( )u s
-
1
2 22( )Q s g
-
-
-
1
1 11( )Q s g
1( )u s
2 ( )u s
11( )y s
22 ( )y s
12 ( )y s
21( )y s
1ˆ
id
2ˆ
id
1ˆ
od
2ˆ
od
42
Uncertainty compensation in Multivariable process
PI-
-
-
PI-
11g
12g
22g
21g
1c
2c
1y
2y
121
11
( )g
Q sg
1r
2r21
2
22
( )g
Q sg
1u
2u
GGDGC
43
Sun L, Li D, Lee K Y. Enhanced decentralized PI control for fluidized bed combustor
via advanced disturbance observer. Control Engineering Practice, 2015, 42: 128-
139.
Equivalent block diagram transformation
Uncertainty compensation in Multivariable process
Conclusion: The proposed AUCBC Solution can be equivalent to the conventional inverted decoupling, but with robustness significantly improved!!!
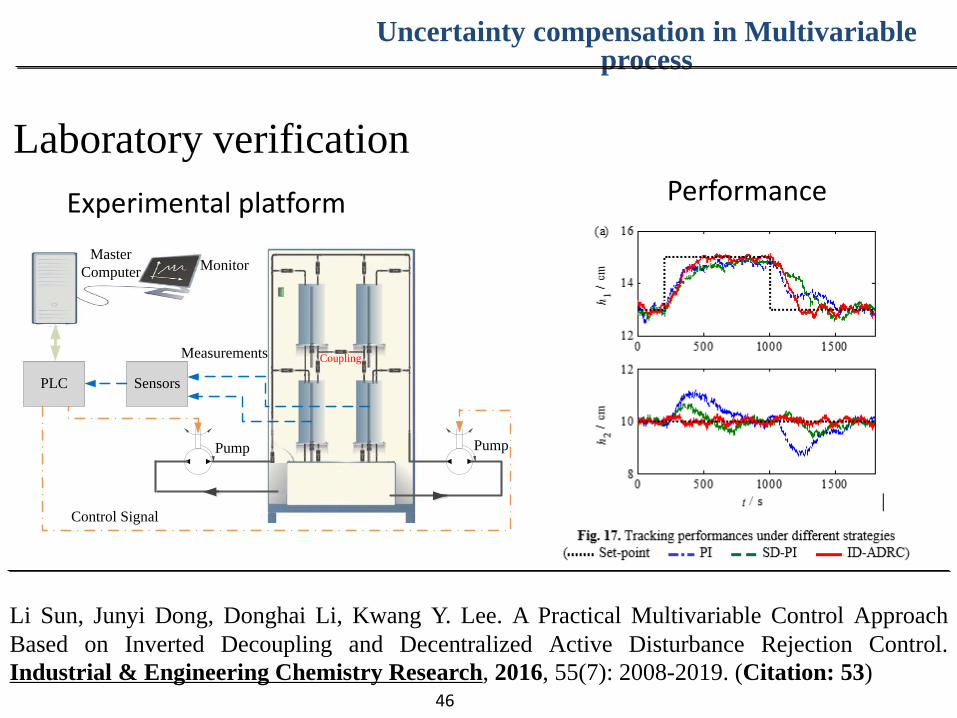
Laboratory verification
46
Experimental platform
Coupling
Master
ComputerMonitor
SensorsPLC
Measurements
Control Signal
Pump Pump
Li Sun, Junyi Dong, Donghai Li, Kwang Y. Lee. A Practical Multivariable Control Approach
Based on Inverted Decoupling and Decentralized Active Disturbance Rejection Control.
Industrial & Engineering Chemistry Research, 2016, 55(7): 2008-2019. (Citation: 53)
Uncertainty compensation in Multivariable process
Performance
Content
35
Background
Theoretical development
Experimental Applications
Conclusions
36
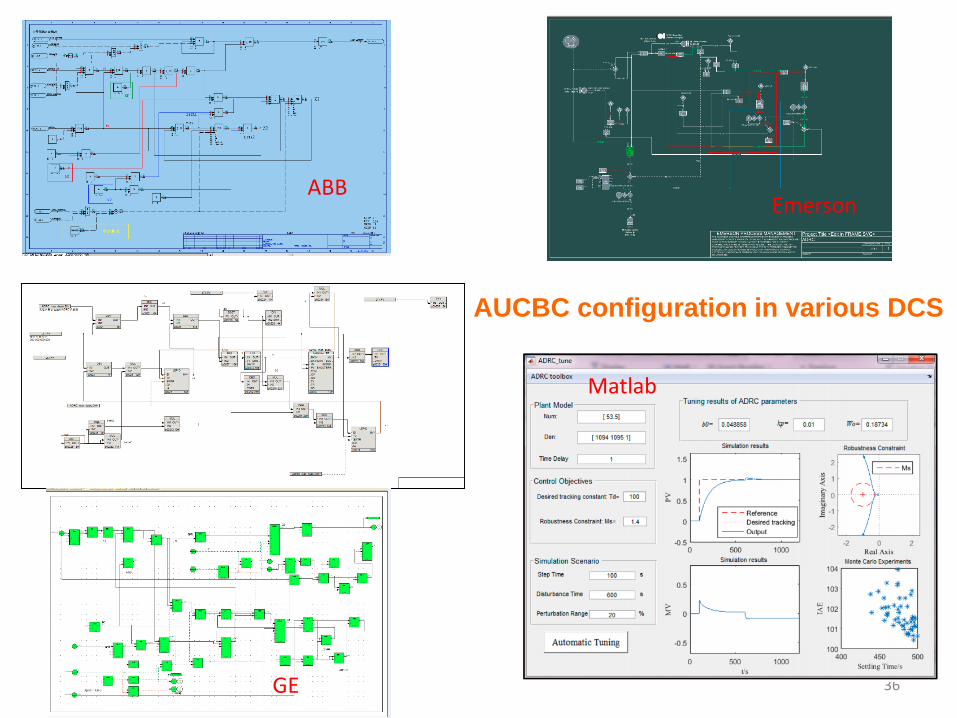
AUCBC configuration in various DCS
EmersonABB
GE
Matlab
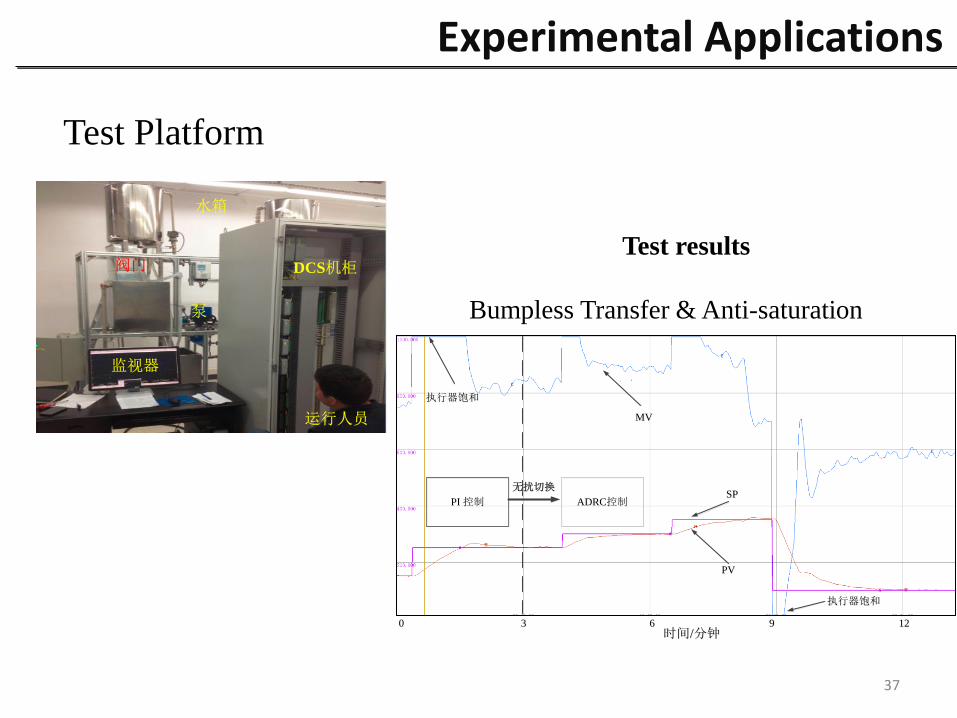
37
水箱
泵
监视器
DCS机柜
运行人员
阀门
PI 控制PI 控制 ADRC控制ADRC控制
MVMV
PVPV
无扰切换无扰切换SPSP
执行器饱和执行器饱和
执行器饱和执行器饱和
时间/分钟时间/分钟00 33 66 99 1212
Test Platform
Test results
Bumpless Transfer & Anti-saturation
Experimental Applications
Application Examples
38
Water level control in a 1000MW power plant
Temperature Control in a 300MW power plant
Fuel cell control

39
Application in power plant regenerator
Experimental Applications
40
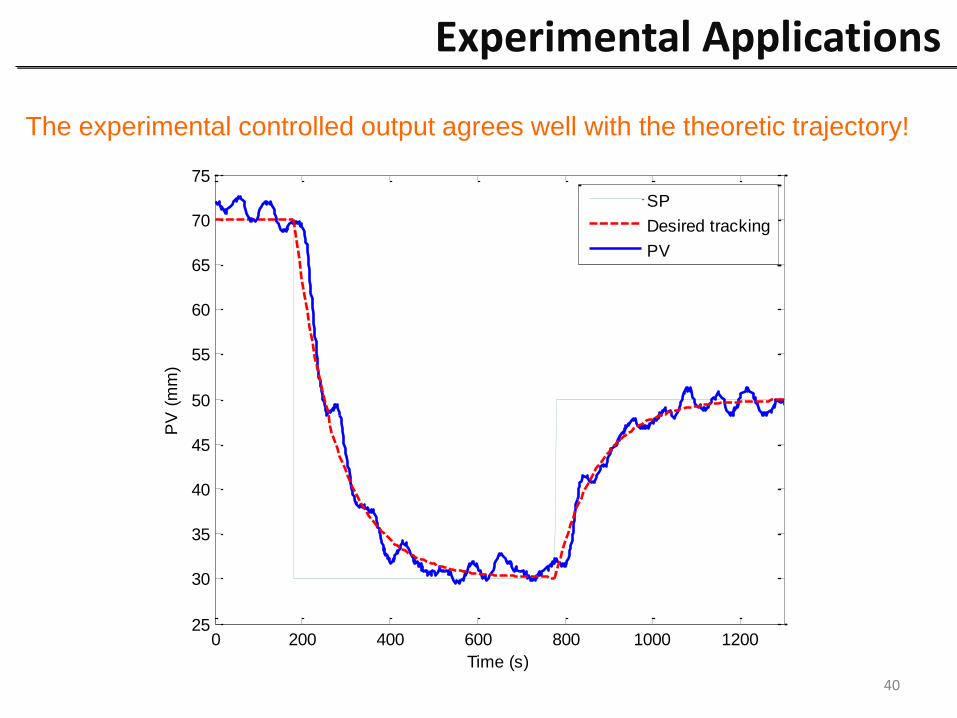
Experimental Applications
0 200 400 600 800 1000 120025
30
35
40
45
50
55
60
65
70
75
Time (s)
PV
(m
m)
SP
Desired tracking
PV
The experimental controlled output agrees well with the theoretic trajectory!

41
Sun L, Li D, Hu K, et al. On tuning and practical implementation of active disturbance
rejection controller: a case study from a regenerative heater in a 1000 MW power plant.
Industrial & Engineering Chemistry Research, 2016, 55(23): 6686-6695.
Experimental Applications
SP
PV
MVDisturbance (#2 valve)
340s10mm
PVd
10%
MV
SP
PV
MVDisturbance (#2 valve)
310s
24mm
PV MV d
10%
AUCBC
PID
VS
42
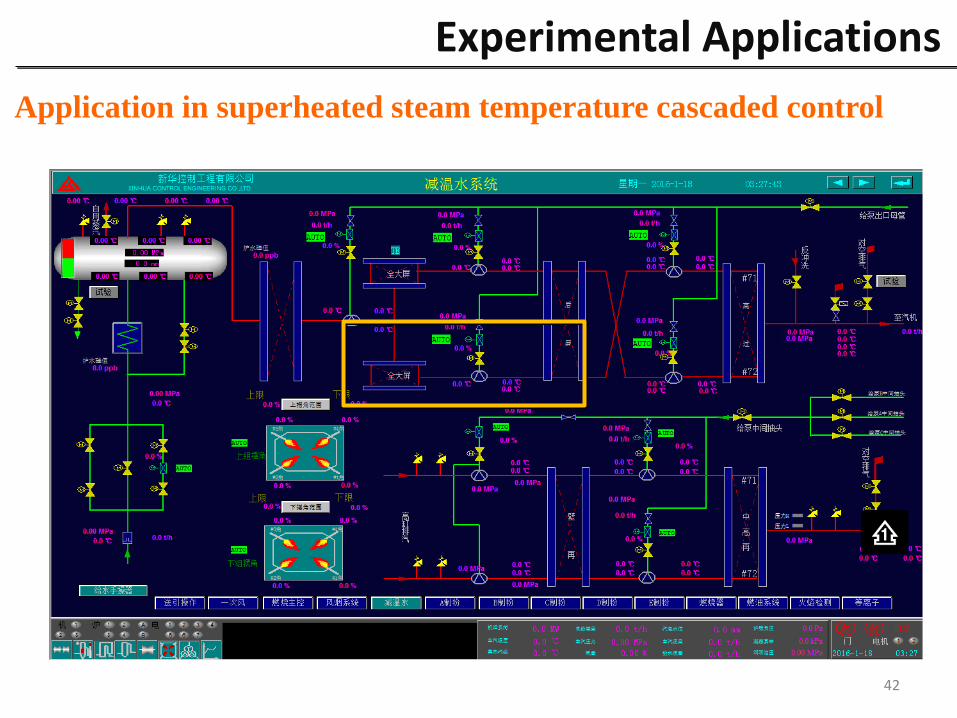
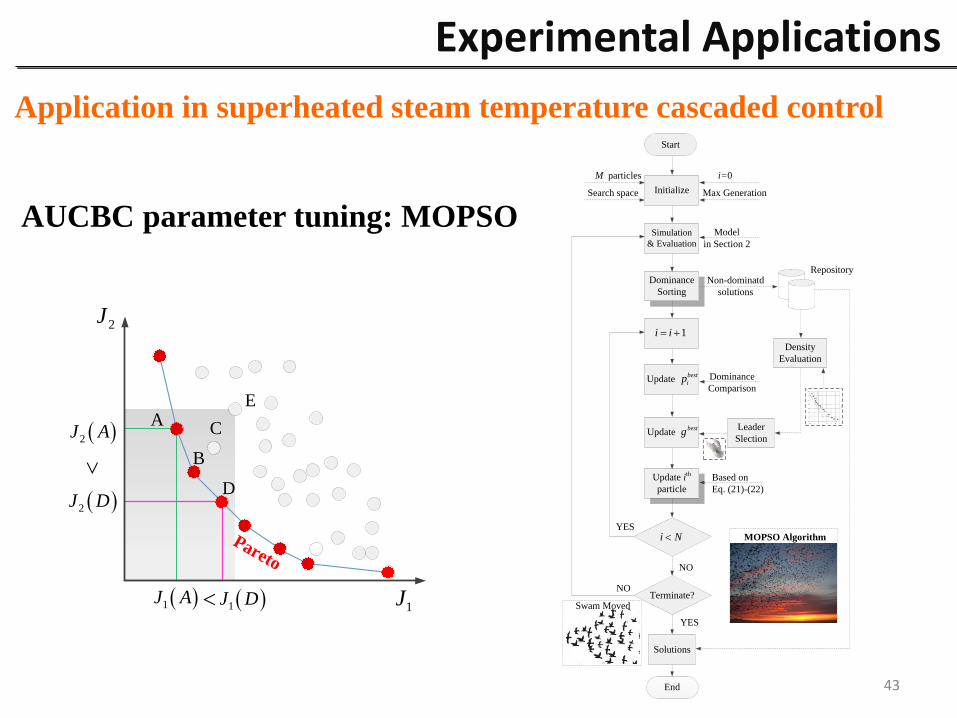
Application in superheated steam temperature cascaded control
Experimental Applications
43
Application in superheated steam temperature cascaded control
Experimental Applications
1J
2J
A
B
C
D
1J A 1J D
Pareto
2J A
2J D
E
Repository
Start
Initialize
Simulation
& Evaluation
Dominance
Sorting
Non-dominatd
solutions
Update best
ip
Update bestg
Leader
Slection
Update ith
particle
Density
Evaluation
Terminate?
i N
1i i
YES
NO
NO
YES
End
M particles
Search space
i=0
Max Generation
Model
in Section 2
Dominance
Comparison
Based on
Eq. (21)-(22)
Swam Moved
Solutions
MOPSO Algorithm
AUCBC parameter tuning: MOPSO

44
Long-term running data statistics under different controls
Experimental Applications
Sun L, Hua Q, Shen J, et al. Multi-objective optimization for advanced superheater steam
temperature control in a 300 MW power plant. Applied Energy, 2017, 208: 592-606.
45
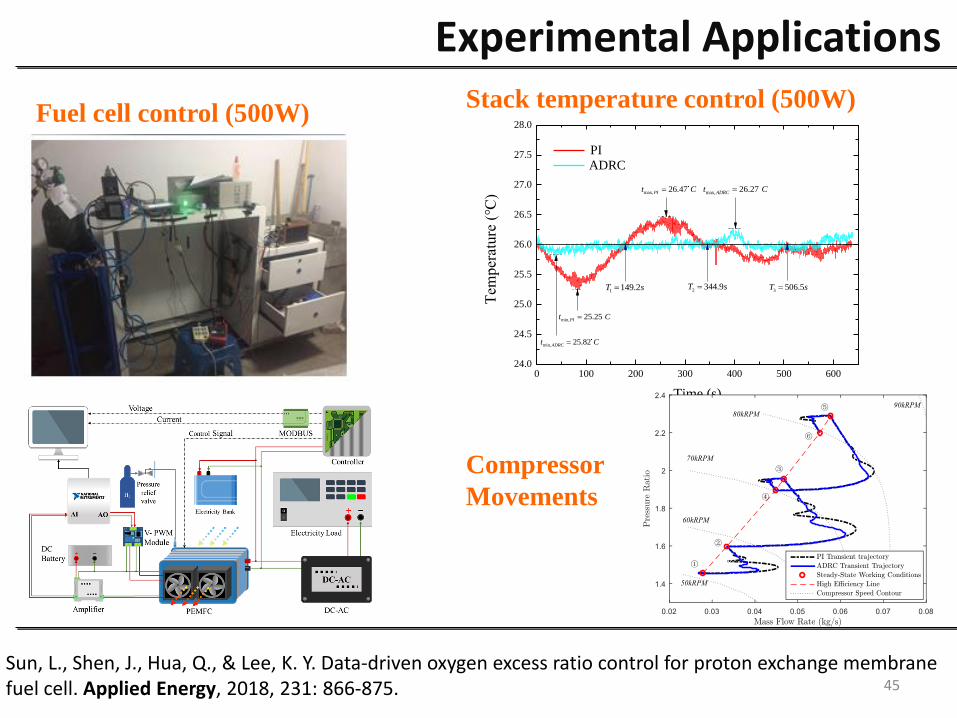
Fuel cell control (500W)
Experimental Applications
Sun, L., Shen, J., Hua, Q., & Lee, K. Y. Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Applied Energy, 2018, 231: 866-875.
0 100 200 300 400 500 60024.0
24.5
25.0
25.5
26.0
26.5
27.0
27.5
28.0
Tem
per
ature
(℃
)
PI
Time (s)
3 506.5T s2 344.9T s1 149.2T s
max, 26.27ADRCt Cmax, 26.47PIt C
min, 25.25PIt C
ADRC
min, 25.82ADRCt C
Stack temperature control (500W)
Compressor
Movements
Content
46
Background
Theoretical development
Experimental Applications
Conclusions
47
Conclusion
Uncertainty is universal, inevitable and essential for control;
A new computation algorithm is developed for PI optimization.
The data-driven uncertainty compensation method is extended totime-delay, unstable, NMP and multivariable processes.
Several successful applications in power plants and fuel cells
More application examples and theoretic details can be found:

48
References• Li Sun, Junyi Dong, Donghai Li, and Yuqiong Zhang. «Model-Based Water Wall Fault Detection and Diagnosis of FBC Boiler Using Strong
Tracking Filter.” Hindawi Mathematical Problems in Engineering, Volume 2014, Article ID 504086, 8 pages, http://dx.doi.org/10.1155/2014/504086.
• Li Sun, Donghai Li, and Kwang Y. Lee. "Enhanced decentralized PI control for fluidized bed combustor via advanced disturbanceobserver." Control Engineering Practice 42 (2015): 128-139, http://dx.doi.org/10.1016/j.conengprac.2015.05.014.
• Li Sun, Donghai Li, Zhiqiang Gao, ZhaoYang, Shen Zhao. “Combined feedforward and model-assisted active disturbance rejectioncontrol for non-minimum phase system.” ISA Transactions 2016, http://dx.doi.org/10.1016/j.isatra.2016.04.020.
• Li Sun, Donghai Li, and Kwang Y. Lee. "Optimal disturbance rejection for PI controller with constraints on relative delay margin." ISATransactions 63 (2016) 103-111, http://dx.doi.org/10.1016/j.isatra.2016.03.014.
• Li Sun, Donghai Li, Qing-Chang Zhong, and Kwang Y. Lee. "Control of a class of industrial processes with time delay based on amodified uncertainty and disturbance estimator." IEEE Transactions on Industrial Electronics, Vol. 63, No. 11, pp. 7018-7028,November 2016, DOI 10.1109/TIE.2016.2584005.
• Li Sun, Junyi Dong, Donghai Li, and Kwang Y. Lee. "A Practical Multivariable Control Approach Based on Inverted Decoupling andDecentralized Active Disturbance Rejection Control." Industrial & Engineering Chemistry Research, 55(7): 2008-2019, February 2016.DOI: 10.1021/acs.iecr.5b03738.
• Li Sun, Donghai Li, Kwang Y. Lee, and Yali Xue, “Control-oriented modeling and analysis of direct energy balance in coal-fired boiler-turbine unit.” Control Engineering Practice 55 (2016): 38-55.
• Li Sun, Donghai Li, Kangtao Hu, Kwang Y. Lee, and Fengping Pan. "On Tuning and Practical Implementation of Active DisturbanceRejection Controller: A Case Study from a Regenerative Heater in a 1000MW Power Plant." Industrial & Engineering ChemistryResearch, 55(23): 6686-6695. DOI: 10.1021/acs.iecr.6b01249.
• Li Sun, Qingsong Hua, JiongShen, Yali Xue, Donghai Li, and Kwang Y. Lee, “Multi-objective optimization for advanced superheatersteam temperature control in a 300 MW power plant,” Applied Energy 208 (2017) 592-606,http://dx.doi.org/10.1016/j.apenergy.2017.09.095.
• Li Sun, Qingsong Hua, Jiong Shen, Yali Xue, Donghai Li, and Kwang Y. Lee, “A Combined Voltage Control Strategy for FuelCell,” Sustainability 2017, 9, 1517; doi:10.3390/su9091517.
• Li Sun, Qingsong Hua, Donghai Li, Lei Pan, Yali Xue, and Kwang Y. Lee, “Direct energy balance based active disturbance rejectioncontrol for coal-fired power plant,” ISA Transactions 70 (2017) 486-493, http://dx.doi.org/10.1016/j.isatra.2017.06.003.
• Li Sun, Jiong Shen, Qingsong Hua, and Kwang Y. Lee, “Data-driven oxygen excess ratio exchange membrane fuel cell,” Applied Energy231 (2018) 866-875, https://doi.org/10.1016/j.apenergy.2018.09.036.
• Guanru Li, Lei Pan, Qingsong Hua, Li Sun, and Kwang Y. Lee, “Water Pump Control: A Hybrid Data-Driven and Model-Assisted Active Disturbance Rejection Approach,” Water 2019, 11, 1066; doi:10.3390/w11051066.
Thank you for your attention!
Q&A
49