Embed Size (px)
Citation preview

Contents lists available at SciVerse ScienceDirect
Journal of Sound and Vibration
Journal of Sound and Vibration 331 (2012) 27–40
0022-46
doi:10.1
� Cor
E-m
journal homepage: www.elsevier.com/locate/jsvi
Active noise control with on-line estimation of non-Gaussiannoise characteristics
Marco Bergamasco, Fabio Della Rossa, Luigi Piroddi �
Politecnico di Milano, Dipartimento di Elettronica e Informazione, Via Ponzio 34/5, 20133 Milano, Italy
a r t i c l e i n f o
Article history:
Received 24 January 2011
Received in revised form
4 July 2011
Accepted 25 August 2011
Handling editor: D.J. Waggthe adaptive filter weight update process must be modified by discarding or discounting
Available online 9 September 2011
0X/$ - see front matter & 2011 Elsevier Ltd.
016/j.jsv.2011.08.025
responding author. Tel.: þ39 02 2399 3556; f
ail addresses: [email protected] (M. B
a b s t r a c t
Active noise control (ANC) is a methodology for attenuating noise based on adaptive
signal processing algorithms. ANC is well assessed for the attenuation of Gaussian noise,
but the rejection of non-Gaussian impulsive noise signals represents a much more
critical task that may even impair algorithm convergence. To overcome this problem
samples associated with impulsive noise. This can be done either by modeling the
impulsive noise with a non-Gaussian distribution such as the Symmetric a-stable ðSaSÞ
distribution or by applying an outlier detection method. With both approaches the
accuracy in the noise description appears to be crucial for effective noise reduction. This
paper proposes two novel approaches for the attenuation of impulsive noise both for
invariant and time-varying noise distributions. The first one is based on the on-line
estimation of an SaS model of the noise probabilistic description. The second relies on a
simple on-line recursive procedure that reliably estimates amplitude thresholds for
outlier detection. Both methods compare favorably with competitor approaches, while
maintaining a sufficiently low algorithm complexity. Several examples are shown to
demonstrate the algorithms’ effectiveness.
& 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Active noise control (ANC) is a methodology for the cancellation or attenuation of disturbing acoustic noise, which hasrecently gained new appeal both in the scientific and industrial communities, in view of the numerous methodologicaldevelopments in digital signal processing and technological advancements in microelectronics, that have made the realizationof several successful applications possible and have spurred various theoretical developments (see, e.g., [1,2]). While passivenoise control operates by sound absorption or reflection using passive elements, such as barriers, silencers, absorptive material,mufflers, ANC employs additional secondary sound sources to cancel the (primary) noise based on the destructive interferenceprinciple. Adaptive filtering techniques are employed to generate the cancellation signal. More precisely, the secondary signal istypically obtained by suitably filtering a reference signal correlated with the noise, the filter coefficients being adaptively tunedto minimize the error signal. The latter is measured by a suitably positioned microphone that senses the signal resulting fromthe acoustic summation of the primary noise and the secondary cancellation signal. Various algorithms can be used for thispurpose depending on the problem setting and the allowed computational complexity. Among the most popular ones are theFiltered-x Least Mean Squares (FxLMS) and the Filtered-u recursive Least Mean Squares (FuLMS) algorithms. Several theoreticaldevelopments and successful applications are documented in the related literature (see, e.g., [1,2]).
All rights reserved.
ax: þ39 02 2399 3412.
ergamasco), [email protected] (F. Della Rossa), [email protected] (L. Piroddi).

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4028
The mentioned algorithms are designed to work with linear systems and Gaussian signals, but may fail to providesignificant attenuation or even to achieve convergence in the—not infrequent—case that the noise signal is of impulsive typeand occasionally presents outliers (i.e., high amplitude data that appear with low probability). In fact, impulsive noise isgenerated by non-Gaussian processes, and, more specifically, symmetric a-stable ðSaSÞ distributions can be used to representreal-world audio signals with outliers, thanks to the heavier tails compared to the Gaussian distribution [3,4]. The so-calledcharacteristic exponent a of an SaS distribution accounts for the degree of impulsiveness of the signal. These non-Gaussiandistributions are characterized by the non-existence of second order moments, [5], so that algorithms that operate byminimization of the error variance may fail to converge. Stated otherwise, the amplitude bursts generated on the error signalby the impulsive characteristics of the noise may determine excessive filter weight corrections and destabilize the algorithm.
Although the basic FxLMS algorithm can be modified to provide a partial solution to the described problem, introducingsimple mechanisms such as gain adaptation (see, e.g., [6]), gain normalization (as a function of the power of the inputsignal), leakage [1], or even adopting a constrained optimization scheme [1,2], convergence cannot be guaranteed andinstability may still occur.
Several methods have been proposed in the literature specifically for the ANC of impulsive noise. For example, [5]considers the minimization of a fractional lower order moment (FLOM) po2 of the error instead of its variance. Theresulting algorithm is termed LMP, for Least Mean p-norm. If the secondary path is accounted for in the adaptationmechanism, the algorithm is denoted Filtered-x LMP (FxLMP). If p� a, where a is the characteristic exponent of the SaSdistribution, then the ANC system performance is significantly improved by using the FxLMP algorithm as opposed to theFxLMS. However, instability may still occur if pZa, so that overall this method heavily relies on the accurate knowledge ofthe probabilistic characteristics of the noise signal (specifically the value of a), [7], and may fail if these are not preciselyestimated or vary with time.
A way to reduce the computational effort of the FxLMP algorithm (and to avoid requiring the prior knowledge of a) issuggested in [3], that makes an a priori conservative assumption on the probability density function (PDF) of the impulsivenoise (by setting p to a safely low value). The resulting Filtered-x Least Mean Absolute Deviation (FxLMAD) algorithmessentially amounts to performing the weight update based on the error sign, so that it is not destabilized by abruptamplitude bursts of that signal, and all issues related to the signal amplitude are removed. This method trades convergencespeed for robustness, ensuring algorithm stability by way of the conservative choice of p, but it may be painstakingly slowfor Gaussian or nearly-Gaussian signals. In the following we will collectively denote the described algorithms as FLOM-based methods.
An even simpler mechanism is adopted in [8], where a standard FxLMS weight update scheme is adopted at almost allsampling instants, save those where outliers are detected in the reference signal, which are skipped in the adaptationprocess. A very simple outlier detection scheme is applied, based on amplitude thresholds only. This can be envisaged as acrude approximation of the probability distribution of the reference signal using a uniform distribution with twoamplitude thresholds that establish if a sample is to be considered an outlier (impulsive noise) or not. The resultingalgorithm has good convergence and stability properties provided that appropriate thresholds are adopted, but appears tobe very sensitive to their values. A variant of this algorithm is suggested in [7], where out-of-scale samples of both thereference and error signal are detected, as opposed to monitoring only the reference signal as in [8]. In addition, out-of-scale samples are not simply skipped, but rather saturated to the thresholds prior to entering the weight update process. Inthe following we will refer to this class of algorithms as Amplitude Threshold (AT)-based methods.
Apart from the conservative FxLMAD approach, both FLOM- and AT-based methods rely on an accurate matching of theassumed signal probability characteristics to those of the actual impulsive signal, a prior knowledge that is generally notavailable in real-world ANC problems. Besides, such characteristics may vary with time, so that a priori information maynot be enough. Fortunately, both the non-Gaussian PDF and appropriate outlier thresholds can be adaptively estimated.This work first integrates the FxLMP approach with an adaptive scheme for the on-line estimation of the characteristicexponent of the signal distribution to overcome the necessity of prior knowledge on the impulsive signal. The sameestimation scheme is then used to improve the performance of the FxLMAD by suitably adapting the step length. Next, anaccurate threshold estimation scheme for outlier detection is combined with the methods proposed in [7]. All illustratedANC algorithms display improved performance (especially in terms of noise reduction at steady-state) when endowedwith accurate methods for the estimation of the impulsive noise characteristics. Furthermore, the resulting algorithms canalso be used in the presence of time varying characteristics of the impulsive signal.
The paper is organized as follows. Section 2 reviews the concepts of SaS distributions and FLOMs for thecharacterization of impulsive noise. Section 3 briefly describes the standard ANC problem setting and illustrates theFxLMS algorithm, as well as ANC algorithms specifically designed for the attenuation of impulsive noise. Section 4illustrates the proposed methods for the estimation of the impulsive noise characteristics and their integration in the ANCschemes. Finally, some simulation results that demonstrate the performance improvements that can be achieved with thesuggested algorithms are illustrated in Section 5 before the final conclusions.
2. Characterization of non-Gaussian impulsive noise
Real-world acoustic signals that present impulsive behavior can be accurately described as stochastic processes with asymmetric a-stable (SaS) distribution, that displays heavier tails compared to the Gaussian distribution, [3,9,4].

0–2–4–6 2 4 60
0.1
0.2
0.3
0.4
2 3 4 5 60
0.02
0.04
0.06
0.08
0.1α = 1α = 1.5α = 2
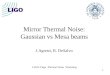
Fig. 1. (a) PDF of an SaS process for different values of a and g¼ 1. (b) Tails of the PDF.
0 0.2 0.4 0.60
1
2
3
4
5
0 0.05 0.10
10
20
30
40noisegaussianSαS
–0.4 –0.1 –0.05–0.2–0.6
Fig. 2. Sampled distribution of (a) a road traffic noise signal and (b) an office environment noise signal, fitted using Gaussian and SaS distributions.
M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 29
The stability property and the generalized central limit theorem still hold for SaS distributions, but the PDF does notgenerically admit an analytic expression, except in some particular cases, such as the Gaussian or the Cauchy distributions.The characteristic function of an SaS distribution is given by
fðxÞ ¼ e�g9x9a,
where g is the dispersion parameter ðg40Þ and a is the characteristic exponent ð0oar2Þ, which accounts for the degreeof impulsiveness of the signal. A more general expression for the characteristic function of an a-stable distribution is givenin [9]. A picture of the PDF of an SaS process is shown in Fig. 1a.
The ‘‘heavier’’ the tails of the PDF, the more pronounced is the impulsive behavior of a process. Regarding the SaSdistribution, the importance of the tails of the PDF is related to the characteristic exponent a (see Fig. 1b). More in detail,the tails are ‘‘heavier’’ for low values of a (high impulsiveness), and ‘‘lighter’’ for high values of a (low impulsiveness). Thedispersion parameter g accounts for the spread of the PDF around its mean value and plays the same role of the variance inthe Gaussian case. Indeed, when a¼ 2 the dispersion is equal to half the variance.
The Gaussian distribution is a special case of the SaS distribution (for a¼ 2) and it is the only one that admits a finitesecond order moment. For 1oao2 only moments of order less than a exist, that are accordingly called fractional lowerorder moments (FLOM). Given an SaS process x, it can be shown [9] that the p-norm of x is proportional to g, since
E½9x9p�pgp=a: (1)
Fig. 2 shows how fairly general types of noise signals, such as road traffic noise or noise recorded in an officeenvironment, are more accurately described as SaS processes rather than Gaussian ones. Other examples of successfulmodeling of impulsive noise with SaS distributions are discussed, e.g., in [10] where a background noise recorded in akitchen is addressed, and in [4], that considers a noise produced due to a small roll of a chair in a teleconference room.
3. Active noise control
3.1. Basics
ANC exploits the principle of destructive interference to counteract an offending noise traveling on a primary acousticpath using a secondary acoustic source, governed by a controller. The simplest single-channel feedforward scheme employstwo microphones (to measure the error between the two signals and to obtain a reference signal that is well correlated with

Fig. 3. Block diagram of an ANC system.
M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4030
the noise) and one loudspeaker to generate the secondary signal. The controller is a digital filter that processes the referencesignal and whose parameters (called weights) are adapted so as to minimize the (mean square) measured error.
In Fig. 3 P and S are the primary and secondary acoustic paths and C is the controller. Assuming that the two acousticpaths are linear and time-invariant, they can be characterized in terms of their transfer functions P(z) and S(z), or,equivalently, in terms of their impulse responses, p(n) and s(n). The reference, noise and error signals are denoted x(n),d(n), and e(n), respectively. The disturbance d(n) is a filtered version of the (measured) reference signal x(n) through the(unknown) primary acoustic path. The filter output and the secondary signal are denoted as y(n) and y0ðnÞ.
If a controller with a Finite Impulse Response (FIR) filter structure is used, its output y(n) is computed as
yðnÞ ¼XL�1
l ¼ 0
wlðnÞxðn�lÞ ¼wðnÞT xðnÞ,
where xðnÞ ¼ ½xðnÞ xðn�1Þ � � � xðn�Lþ1Þ�T is the reference signal vector at time n and wðnÞ ¼ ½w1ðnÞ w2ðnÞ � � � wL�1ðnÞ�T is
the weight vector, L being the FIR length. The secondary signal is obtained as
y0ðnÞ ¼ sðnÞnyðnÞ,
where n denotes the discrete convolution operator.The objective of the adaptive filtering scheme is to track signal d(n) with the output of the filter y(n). To this purpose,
the adaptive algorithm adjusts the filter weights so that the error signal
eðnÞ ¼ dðnÞ�y0ðnÞ ¼ dðnÞ�sðnÞn½wðnÞT xðnÞ�
is minimized.The FxLMS algorithm [1] uses the following update equation to minimize the stochastic gradient (instantaneous
squared error):
wðnþ1Þ ¼wðnÞþmx0ðnÞeðnÞ,
where m is the algorithm gain or step size, x0ðnÞ ¼ ½x0ðnÞx0ðn�1Þ � � � x0ðn�Lþ1Þ�T and x0ðnÞ ¼ sðnÞnxðnÞ, sðnÞ being an estimatedversion of the secondary path s(n). The interested reader is addressed to [1] for a detailed analysis of the convergenceproperties of the FxLMS algorithm (for Gaussian signals).
3.2. ANC for impulsive noise: FLOM-based methods
The FxLMS algorithm, as well as alternative methods based on error variance minimization, can become unstable whenthe signal source is characterized by an impulsive behavior, since the optimization criterion is expressed in terms of thesecond order moment of the error, which in that case is diverging. In fact, as explained in Section 2, an SaS process has onlymoments of order less than a, so with ao2 the second order moment is not finite.
In [3] the minimum dispersion criterion is proposed instead, which consists in the minimization of the p-norm of theerror, on the grounds that it is proportional to the dispersion parameter of the SaS distribution. Intuitively, a largedispersion implies a large spread around the mean value, so that minimizing the dispersion is equal to minimizing theprobability of large estimation errors, as discussed in [11] with regard to the problem of predicting an ARMA process withinfinite variance.
The associated cost function is JðnÞ ¼ E½9eðnÞ9p� � 9eðnÞ9p
, which gives rise to the FxLMP algorithm, characterized by thefollowing weight update equation:
wðnþ1Þ ¼wðnÞþmp9eðnÞ9p�1sgnðeðnÞÞðsðnÞnxðnÞÞ:
A convergence analysis of the FxLMP algorithm is given in [5]. It is experimentally shown that the algorithmconvergence speed is maximized if p is chosen as close as possible to a. However, instability may still occur if pZa.Therefore, the FxLMP is theoretically optimal under the minimum dispersion criterion but it requires the a priori
knowledge of the signal distribution to obtain fast convergence. Notice also that the FxLMP is computationally much moredemanding than the FxLMS due to the need to calculate fractional powers in the update equation.

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 31
To avoid instability issues one can set parameter p to a sufficiently low value to ensure that poa for all cases ofpractical interest. This is precisely the strategy enacted in [3], where the conservative choice p¼1 is adopted, so that no a
priori information on the signal characteristics is required. This setting has also the added advantage that it is notnecessary to compute a fractional power, since 9eðnÞ9p�1
¼ 1, so that only the sign of the error is actually used in the updateequation, with a consequent saving of computational load. The resulting algorithm is denoted FxLMAD and ischaracterized by the following simple weight update equation:
wðnþ1Þ ¼wðnÞþmsgnðeðnÞÞðsðnÞnxðnÞÞ:
The FxLMAD is computationally much less demanding than the FxLMP and is robust and stable with signals with outliers.On the down side, its convergence speed is much slower than the FxLMS when a is close to 2 and the signal is nearly-Gaussian.
3.3. ANC for impulsive noise: AT-based methods
A second class of methods is based on the (crude) approximation of the SaS process with a uniform distribution, whosesupport identifies the maximum range of the uncorrupted signal, while out-of-bound samples are classified as outliers.
For example, in the approach described in [8], denoted SKM for brevity in the sequel, it is still assumed that thereference signal x(n) can be described as an SaS process, and its contribution in the update equation is weighted accordingto the signal probability. However, since a closed form of the SaS PDF is not available, it is approximated with a uniformdistribution, rather than estimating it. As a result, only reference samples within the limits of the uniform distributioncontribute to the weight updating, and the outlier samples are simply discarded. Precisely, the SKM weight updateequation resembles that of the FxLMS:
wðnþ1Þ ¼wðnÞþmeðnÞðsðnÞn ~xðnÞÞ,
where the reference signal entering the equation is modified as
~xðnÞ ¼xðnÞ if xðnÞ 2 ½c1,c2�,
0 otherwise,
(
and c1 and c2 are suitable amplitude thresholds for the signal.Building on this, [7] proposed an improved version, where the stochastic weighting (calculated for x(n)) is extended to
e(n) as well, to avoid excessive weight corrections resulting from abnormally large errors, and out-of-bounds samples(of both the reference and error signal) are not discarded but saturated to the corresponding thresholds. The resultingalgorithm, denoted AM for brevity, employs the following weight update equation:
wðnþ1Þ ¼wðnÞþm ~eðnÞðsðnÞn ~xðnÞÞ, (2)
where the reference signal and the error entering the equation are modified as
~xðnÞ ¼
xðnÞ if xðnÞ 2 ½c1,c2�,
c1 if xðnÞrc1,
c2 if xðnÞZc2
8><>: (3)
and
~eðnÞ ¼
eðnÞ if eðnÞ 2 ½c1,c2�,
c1 if eðnÞrc1,
c2 if eðnÞZc2:
8><>: (4)
The SKM and AM algorithms are quite appealing in their simplicity, since they are computationally equivalent to theFxLMS, which is an attractive feature for a real implementation of an ANC system for impulsive noise attenuation.However, as for the previous class of methods, some a priori information about the reference signal distribution isimplicitly required to determine suitable thresholds. Both [8,7] assume that an off-line testing procedure can be performedto collect a sufficiently long history of the signal in order to determine the thresholds, by setting the desired signalpercentiles that define the outlier region. More in detail, the dataset is used to numerically construct the CumulativeDistribution Function (CDF) associated to the reference signal x(n). Then, c1 and c2 are set to suitable extremal percentilevalues of the CDF, e.g., the 0.5 and 99.5 percentiles. The rationale is that the fewest possible samples should be discarded,in order to preserve as much information as possible for the filter updating. Notice that precisely because the estimatedCDF must separate normal samples from outliers as sharply as possible, and the latter are by definition sporadic events, thecollected time history must be extremely long to guarantee sufficient accuracy. Therefore, such pre-processing involves aconsiderable delay, so that eliminating it is a significant progress in itself. Besides, the sensitivity of the bounds on thepercentile levels is extremely high (see Table 1), which makes the definition of suitable thresholds an ill-posed problem.Notice that this sensitivity problem gets stiffer as a gets farther from 2, i.e. the more impulsive the noise signal is.

Table 1Sensitivity of the thresholds c1 and c2 to the percentile levels.
Percentile Thresholds Characteristic exponent a
1.3 1.5 1.7 1.9
0.1 c1 �89.80 �33.20 �17.79 �7.91
99.9 c2 76.40 36.00 18.58 7.62
0.5 c1 �20.60 �11.60 �7.35 �4.34
99.5 c2 20.40 11.80 7.45 4.37
1.0 c1 �12.40 �7.40 �5.10 �3.66
99.0 c2 12.20 7.80 5.33 3.71
M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4032
In both [8,7] the percentile levels are set by the user based on trial-and-error and a posteriori performance evaluation,which makes the whole process particularly awkward.
4. ANC methods using estimation of the impulsive noise characteristics
4.1. Methods based on the estimation of the characteristic exponent
The main drawback of the previously illustrated algorithms (with the exception of the FxLMAD) is the requirement ofquite precise a priori information. Allowing for off-line analysis of a sufficiently long time history of data, the necessaryinformation can be estimated and the algorithms successfully applied with robust convergence properties. On the otherhand, in the absence of this off-line data pre-processing phase the FxLMP, SKM and AM algorithms are inefficient and caneven display convergence loss phenomena. The FxLMAD makes an exception, in that it makes an a priori conservativechoice on the probabilistic characteristics of the signal which guarantees convergence at the expense of speed. In fact,when a is close to 2 its convergence speed is very slow compared to all the other algorithms.
In this section the FxLMP approach is complemented by an on-line recursive scheme for the estimation of thecharacteristic exponent of the signal distribution. Let x be an SaS random variable with zero mean value. Definingy¼ log9x9, it can be shown [9] that the variance of y is given by
Var½y� ¼p2
6
1
a2þ
1
2
� �: (5)
Given a set of x data it is then possible to solve backwards expression (5) to estimate a. An experimental test of this aestimation scheme is presented in [4]. Furthermore, the batch procedure can be easily made recursive for on-line adaptiveestimation of a as described in the following.
The extended version of the FxLMP algorithm, here denoted FxLMPest can be formulated as follows:
wðnþ1Þ ¼wðnÞþmpðnÞ9eðnÞ9pðnÞ�1sgnðeðnÞÞðsðnÞnxðnÞÞ, (6)
where
pðnÞ ¼ kaðnÞ,
aðnÞ ¼ s2y ðnÞ
6
p2�
1
2
� ��1=2
, (7)
and k 2 ½0:8,0:99� is an additional safety factor to avoid unintentional overestimation of a. Variable s2y ðnÞ denotes the
sampled variance of y computed on-line using a sliding window approach. To this end, the sampled mean of y is firstcomputed recursively as
E½y� �myðnþ1Þ ¼myðnÞþDmyðnþ1Þ,
Dmyðnþ1Þ ¼1
Nðxðnþ1Þ�xðn�Nþ1ÞÞ, (8)
and then used to update the recursive sampled variance as follows:
Var½y� � s2y ðnþ1Þ ¼ s2
y ðnÞþDm2y ðnþ1Þþ
1
Nðxðnþ1Þ�myðnþ1ÞÞ2�
1
Nðxðn�Nþ1Þ�myðnþ1ÞÞ2
where N is the window length.The same idea can be also exploited to devise an easier and computationally lighter version of the FxLMP algorithm, in
which the fractional order power is simplified to p¼1 as in the FxLMAD algorithm, but the factor p is still retained in the

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 33
update equation, to act as a gain multiplier. More precisely, the following update equation can be used:
wðnþ1Þ ¼wðnÞþmpðnÞsgnðeðnÞÞðsðnÞnxðnÞÞ:
In the previous expression parameter pðnÞ is computed according to Eq. (7). Notice that this weight update rule employsthe estimated characteristic exponent to adapt the step size, allowing for bigger steps when the signal is Gaussian-like andsmaller ones otherwise. The resulting algorithm is here denoted FxLMADadapt to emphasize that it resembles the FxLMADalgorithm with the addition of a step size adaptation depending on the estimated characteristic exponent.
4.2. AT-based methods
The previously reviewed SKM and AM methods essentially perform an outlier detection, deriving the c1 and c2
thresholds by a crude approximation of the SaS distribution with a uniform distribution on a bounded interval. In thissection we adopt a more accurate and efficient technique to estimate the c1 and c2 bounds, based on the so called box-plot
(BP) algorithm, [12]. Besides yielding better bound estimates, the explained method is inherently recursive, thus avoidingthe need for collecting a time series for a priori processing and extending the method usability to impulsive signals withtime-varying characteristics.
Outlier detection is a much studied topic in data analysis and several approaches have been put forward for thispurpose [13]. Those methods can be essentially divided into two classes, depending on the requirement or not of a priori
knowledge of the distribution from which the data are generated. The techniques of the first class (the Chauvenet criterion[14], the Grubbs’ Test [15,16], the Tietjen-Moore test [17], the generalized extreme Studentized deviate (ESD) test [18],etc.; see [19] for other techniques) use the mean and the standard deviation to identify outliers. Besides the need for a
priori information, these techniques are not suited for the problem at hand in view of the requirement of moments up toorder 2. Other methods do not use any a priori knowledge on the data, using alternative information such as theinterquartile range. The most popular method of this type is the BP approach, described in [12], that is taken into accountin this work.
Given a vector of data, the (batch) BP algorithm works as follows:
�
Find the first and third quartiles, denoted Q1 and Q3, (i.e., the first data that are bigger than the 25% and 75% of thewhole population, respectively); � Define the interquartile range as IQR¼Q3�Q1; � Set the outlier bounds to c1 ¼Q1�1:5 IQR, c2 ¼Q3þ1:5 IQR.As explained in [12], in case of a normal signal, the BP algorithm classifies as outliers � 0:7% of the data (see Fig. 4).Notice that this method does not require the numerical computation of the CDF of the data, that is instead employed in [7].
Even more interestingly, a recursive version of this algorithm can be devised for on-line use in the ANC context. Moreprecisely, the BP algorithm is applied to a sliding window of N data that are kept sorted both by age and value. At each timesample n the new datum x(n) is collected and the following operations are carried out:
�
If either xðnÞrc1 or xðnÞZc2 the sliding window is not updated, and the weight update Eq. (2) is executed using ~xðnÞand ~eðnÞ as defined in (3)–(4);Fig. 4. Box-plot and PDF of a Gaussian dataset.

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4034
�
If xðnÞ 2 ðc1,c2Þ, delete the oldest datum from the sliding window and insert the new one in the correct position in thesorted-by-value list (this operation requires log2N comparisons). Then recompute the bounds using the BP algorithm onthe data in the window.The usage of the AM weight update rule in combination with the recursive version of the BP approach for theestimation of c1 and c2 is denoted BDP algorithm in the following.
Fig. 5 depicts the noise reduction performance of the AM algorithm in terms of the mean absolute error (MAE)amplitude at steady-state, for varying percentile levels and different degrees of impulsiveness of the considered noisesignal. Apparently, the algorithm performance is quite sensitive to the percentile levels, the optimal choice of thethresholds being a-dependent, as already conceded in [7]. This makes the choice of suitable values for c1 and c2 a complextask in the absence of adequate knowledge of the signal characteristics. On the other hand, the BDP approach (see thediamond shapes in Fig. 5) generally appears to give a reasonable estimate of the optimal choice of the bounds without anya priori information.
As a concluding remark, notice that the proposed BDP approach (as well as the one proposed in [7]) can also be used forsignals in which not even the first moment is defined (e.g., signals that follow an SaS distribution with ao1), since all thatis required is the existence of the CDF associated to the noise signal.
4.3. Comparison of algorithm complexity
The basic FxLMS iteration consists of two convolution sums for the computation of the filter output y(n) and the filteredreference signal x0ðnÞ, plus the weight update equation. Denoting with L and S the lengths of the filter and secondary path,respectively (both described as FIR models), this amounts to 4Lþ2S�1 scalar operations (additions or multiplications),(see also [1]). The FxLMAD, SKM and AM algorithms have comparable complexity, adding only a few scalar operationseach, as reported in Table 2.
The FxLMP algorithm adds to this the computation of ap, a being the absolute value of the error. Observing thatap ¼ 2p log2ðaÞ, this amounts to one product, a logarithm and an exponential operation. The latter two tasks can beperformed, e.g., with a truncated Taylor expansion up to order M, thus requiring 3M�1 operations each (for M41), so thatthe overall cost of the fractional power computation is 6M�1.
The estimation of the SaS distribution characteristics used by the proposed FxLMPest and FxLMADadapt algorithmsrequires 6Mþ15 operations (3M for the calculation of log9x9, 13 for the update of the mean and variance, and 3Mþ2 for
Table 2Algorithm complexity.
Algorithm # scalar operations
FxLMS 4Lþ2S�1
FxLMP 4Lþ2Sþ6Mþ1
FxLMAD 4Lþ2S
FxLMPest 4Lþ2Sþ12Mþ16
FxLMADadapt 4Lþ2Sþ6Mþ16
SKM 4Lþ2Sþ1
AM 4Lþ2Sþ3
BDP 4Lþ2Sþ log2ðNÞþ7
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
100
101
102
103
104
Lower Percentile
α = 1.1α = 1.5α = 1.8BDP
MA
E
Fig. 5. Mean absolute error (MAE) at steady-state using the AM algorithm for varying percentile levels, with a¼ 1:1,1:5,1:8. Data are averaged over 50
simulations. Diamond shapes indicate the equivalent percentile levels selected by the BDP approach.

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 35
the computation of pðnÞ). In summary, the estimation cost is comparable to the cost of the fractional power computation inthe FxLMP, so that this algorithm and the FxLMADadapt have comparable complexity, while the FxLMPest is significantlycostlier than both.
Finally, the BDP algorithm based on the adaptive BP approach has the same complexity of the AM algorithm pluslog2ðNÞ operations to insert the new datum in the sorted-by-value list, N being the size of the sliding window, and four
additional operations for the computation of c1 and c2. This makes it only slightly more complex than the AM, andtherefore extremely competitive in terms of computational cost.
5. Simulation examples
5.1. Problem setting
In order to assess the performance achievable using the proposed FxLMPest, FxLMADadapt, and BDP algorithms, asimulation study like that presented in [7] has been performed, using various types of impulsive signals and comparing thementioned algorithms to the FxLMP, the FxLMAD, the SKM and the AM algorithms. In all the presented simulations, the pre-defined thresholds c1 and c2 required by the SKM and AM algorithms have been chosen by inspection of the CDF of thesignal as the 0.5 and 99.5 percentiles of x(n), respectively, as suggested in [7], using a sufficiently long time history of thesignal to yield an accurate estimation of the CDF. Regarding the proposed BDP algorithm a window size of N¼256 has beenemployed.
The benchmark problem setting documented in [1] and described by the acoustic paths reported in the data diskattached to that book has been here adopted. The primary path P(z) is modeled as an Infinite Impulse Response (IIR) filterof order (25,25) and the secondary path S(z) as an FIR filter with 128 coefficients. The estimated secondary path SðzÞ isassumed equal to S(z) for simplicity. The ANC filter W(z) is taken as an FIR filter of order 192. The reference signal ismodeled as an SaS process with different values of the characteristic exponent, in order to simulate various workingconditions.
As in [7], the various approaches have been compared in terms of the Noise Reduction (NR) factor:
NRðnÞ ¼AdðnÞ
AeðnÞ,
where
AdðnÞ ¼ lAdðn�1Þþð1�lÞ9dðnÞ9,
AeðnÞ ¼ lAeðn�1Þþð1�lÞ9eðnÞ9,
and l¼ 0:999 is a forgetting factor. A further smoothing is added by averaging over 40 randomly generated instances foreach case, to ease the readability and interpretability of the results.
5.2. Choice of the step size
In order to provide a meaningful and fair comparison of the various algorithms, the choice of the step size m of theupdate equation must be made with particular care. Consider, in this respect, Fig. 6, which illustrates the average NRachievable at steady-state for increasing step size values and different values of a, assuming that a correct a priori
05
10152025
05
10152025
10–7 10–6 10–5 10–410–7 10–6 10–5 10–410–7 10–6 10–5 10–4
Fig. 6. Average noise reduction at steady-state for increasing step size values and different values of a: (a and b) a¼ 1:1, (c and d) a¼ 1:5, (e and f)
a¼ 1:9; (a, c, e) FLOM- and (b, d, f) AT-based algorithms.

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4036
information on the signal impulsiveness is available (a ¼ a, where a characterizes the assumed signal impulsiveness).More specifically, the various simulations are compared in terms of the following measure:
NR ¼X105
n ¼ 5�104
NRðnÞ,
which is representative of the average noise reduction achieved after a specified time instant. The NR curves, as a functionof m, display a maximum point, in that for large values of m convergence is degraded (although outright divergence may beavoided by the action of the saturations, depending on the algorithm used), and for small values of m convergence is slowand steady-state may not be yet reached at sample time n¼ 5� 104.
Apparently, all algorithms are capable of achieving a factor � 10 noise reduction at steady-state, provided the step sizeis correctly designed, apart from algorithm SKM which obtains a much lower NR for a values far from the normalitycondition. In the most critical situation ða¼ 1:1Þ the optimal value of m is quite different among the various algorithmsranging from 4� 10�7 for AM to 4:5� 10�6 for BDP. The range of m values corresponding to a significant NR factor alsodiffer. For example, an NR415 dB is obtained over a range of m values approximately wide 1:5� 10�6 for AM and 9� 10�6
for BDP. Intuitively, this is due to the fact that the BDP discards more data than AM, and the latter is therefore forced toadopt smaller gain values to account for the larger data points. This implies that AM is significantly more sensitive tovariations in m compared to the other algorithms, and, conversely, BDP is the less sensitive one. Differences among thevarious algorithms tend to disappear for increasing a. The range of step size values that provide NR � 20 dB tends to widenfor all algorithms. It also appears to converge to the same range for nearly Gaussian signals. As a final comment on Fig. 6notice that the AM algorithm displays a much stronger variability of the steady-state noise reduction curves for varying a,as opposed, e.g., to BDP.
Fig. 6 is nicely complemented by the corresponding information regarding the speed of convergence. This can bepractically estimated by fitting an exponential function on the initial part of the noise reduction transient curves andcalculating the corresponding time constant t. Inspecting Fig. 7 it appears that t decreases exponentially for a wide rangeof step size values, with the same exponent for all algorithms, although starting from different points. The minimum pointof these curves provides a (conservative) bound for the insurgence of convergence degradation behaviors. However, if m isincreased up to that minimum point, as would be natural for Gaussian signals, insufficient noise reduction is achieved forlow alpha values (e.g., a¼ 1:1). On the contrary, for a¼ 1:5,1:9 a good compromise between steady-state noise reductionand transient duration can be arranged (the maximum of NR and the minimum of t are close and the curves are flat intheir proximity).
If the characteristics of the disturbance signal in terms of a are constant but unknown (see Section 5.3) or time-varying(see Section 5.4), so that the assumed value of the characteristic exponent (denoted a) may differ from the actual one,possibly undesired effects can be experienced. However, these effects cannot be directly deduced from Fig. 6, because thenoise reduction performance related to the algorithms requiring a priori information on the noise impulsive type (FxLMP,SKM, AM) depends both on a and a. More in detail, a wrong assumption on a for the AM and SKM algorithms causes notonly an inappropriate choice of the gain (as happens for all algorithms), but corresponds also to a different choice of thepercentile levels. For example, if a ¼ 1:9 the corresponding bounds derived from the 0.5 and 99.5 percentiles are 74:35,which actually correspond to the 94 and 6 percentiles if the actual characteristics of the noise signal are modeled bya¼ 1:1. This actually modifies the AM and SKM algorithms (that are driven to discount 12% of the data, as opposed to 1% asassumed previously), which implies a significant variation of the performance curves represented in Fig. 6d. A similarreasoning applies to the FxLMP algorithm as well.
104
105
106
104
105
106
10–7 10–6 10–5 10–4 10–7 10–6 10–5 10–4 10–7 10–6 10–5 10–4
Fig. 7. Convergence time constant for increasing step size values and different values of a: (a and b) a¼ 1:1, (c and d) a¼ 1:5, (e and f) a¼ 1:9; (a, c, e)
FLOM- and (b, d, f) AT-based algorithms.

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 37
5.3. Control of impulsive noise with time-invariant characteristics
The simulations reported in Figs. 8–10 show the average noise reduction obtained by the various algorithms fordifferent degrees of impulsiveness of the noise signal ða¼ 1:1,1:5,1:9Þ, and different assumptions on the characteristicexponent ða ¼ 1:1,1:5,1:9Þ. The step size is designed differently for each algorithm, as the optimal one in terms of theachievable steady-state noise reduction for the assumed value of a (see Fig. 6). Notice that the investigated set of values fora also includes the actual a. In fact, although the availability of exact information on a gives an unfair advantage to theFxLMP, SKM and AM methods, compared to the proposed FxLMPest, FxLMADadapt, and BDP algorithms, which rely on an on-line mechanism for the estimation of this crucial parameter, it is interesting to evaluate all the algorithms in theseconditions as well, to investigate the performance loss (if any) due to the added estimation task of the adaptive algorithms.
Consider first the case a¼ 1:1, representative of a markedly impulsive nature of the reference signal. In case of a correctassumption on a (Fig. 8a and b), the FxLMP and the FxLMAD algorithms display comparable performance, probably owingto the low a value associated to the noise signal (recall that for a¼ 1 the two algorithms would be equivalent). They alsoprovide similar performance to their adaptive counterparts, indicating the well functioning of the a estimation procedure.In the same conditions, the AT-based algorithms display a wider spectrum of performance results (Fig. 8b). In particular,the SKM algorithm displays an unacceptably slow convergence, showing that the modification to the SKM schemeintroduced in [7] is indeed crucial. On the other hand, both AM and BDP achieve a better trade-off between noise reductionand convergence speed, compared to the FLOM-based algorithms. The AM algorithm performs particularly well, because itexploits at most the available information, by discounting only 1% of the data (the BDP discounts 12% of the data).
If the characteristic exponent is – imprudently – over-estimated, as in Fig. 8c–f, the noise reduction capabilities atsteady-state are reduced, essentially due to inappropriate gain settings of all the algorithms for the actual a (actually, the
05
10152025
0 2 4 6 8 10
x 104
05
–5
–5
10152025
0 2 4 6 8 10
x 104
0 2 4 6 8 10
x 104Time stepsTime stepsTime steps
Fig. 8. Noise reduction for a highly impulsive signal ða¼ 1:1Þ: (a and b) a ¼ 1:1, (c and d) a ¼ 1:5, (e and f) a ¼ 1:9; (a, c, e) FLOM- and (b, d, f) AT-based
algorithms.
05
10152025
0 2 4 6 8 10x 104
0–5
–5
510152025
0 2 4 6 8 10x 104
0 2 4 6 8 10x 104Time stepsTime stepsTime steps
Fig. 9. Noise reduction for a moderately impulsive signal ða¼ 1:5Þ: (a and b) a ¼ 1:1, (c and d) a ¼ 1:5, (e and f) a ¼ 1:9; (a, c, e) FLOM- and (b, d, f)
AT-based algorithms.

05
10152025
0 2 4 6 8 10x 104
0–5
510152025
0 2 4 6 8 10x 104
0 2 4 6 8 10x 104Time stepsTime stepsTime steps
–5
Fig. 10. Noise reduction for a scarcely impulsive signal ða¼ 1:9Þ: (a and b) a ¼ 1:1, (c and d) a ¼ 1:5, (e and f) a ¼ 1:9; (a, c, e) FLOM- and (b, d, f) AT-based
algorithms.
M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4038
SKM does not even converge). However, it must be noted that all the adaptive algorithms perform better than theirrespective non-adaptive counterparts.
The case a¼ 1:5 exemplifies also the complementary situation with a – cautious – under-estimation of a (Fig. 9a and b).All algorithms display a slow convergence problem in that situation, but the adaptive algorithms generally provide fasterconvergence, the BDP almost achieving convergence to a 20 dB noise reduction factor in 105 steps, outranking all thealgorithms in terms of speed. In the case of correct a priori information (Fig. 9c and d) all algorithms perform comparablywell and there is no appreciable difference between the adaptive and non-adaptive versions of the same algorithms.Finally, when a is over-estimated (Fig. 9e and f), the FxLMP is significantly affected (contrary to the FxLMPest) and the SKMdiverges once again. The AM and BDP provide the best performance overall in this situation.
The case a¼ 1:9 (see Fig. 10) is the less critical one, since it is closer to the normality condition. The previously obtainedresults are essentially confirmed, showing that when a is under-estimated the noise reduction transients slow down lessdramatically if the adaptive estimation of the noise characteristics is performed. The BDP systematically converges fasterthan the other algorithms to a 20 dB reduction factor. If, on the other hand, the correct a is assumed (Fig. 10e and f), allalgorithms rapidly achieve convergence at a 20 dB noise reduction level, the AT-based algorithms being slightly faster andthe sign-based algorithms (FxLMAD and FxLMADadapt) relatively slower. Again, the estimation-based algorithms are notparticularly penalized in terms of speed by the on-line estimation mechanism.
5.4. Control of impulsive noise with time varying characteristics
An even more interesting application of the proposed algorithms is when the probability characteristics of the noisesignal change with time. Two further simulation experiments have been carried out to study the algorithm performance incase of a varying with the following patterns:
Square wave :
aðnÞ ¼ 1:5 for n¼ 1, . . . ,50,000
aðnÞ ¼ 1:1 for n¼ 50001, . . . ,100,000
aðnÞ ¼ 1:5 for n¼ 100,001, . . . ,150,000
8><>:
Sinusoidal wave : aðnÞ ¼ 1:5þ0:4 sin2p
5� 104n
� �:
The first test studies a sudden drop of the a parameter, modeling an abrupt increase of the probability of outlieroccurrence, while the second one describes a signal that periodically displays a markedly impulsive behavior. Notice thatthe downward a transition at n¼ 5� 104 in the first test is critical, since an overestimation of a is a known cause ofconvergence degradation. The initial algorithms’ settings, i.e. the step size m, the estimate of p for the FxLMP algorithm andthe amplitude bounds for the SKM and AM algorithms, are based on an assumed value of a, denoted a, different in eachexperiment (see figure captions).
The square wave test (see Fig. 11a and b) displays a very different performance for the various algorithms in the variousportions of the simulation, being more problematic in correspondence to the low a value and relatively high for all thealgorithms in the other portion. In detail, with respect to the FLOM-based algorithms (see Fig. 11a), notice that theFxLMPest and FxLMADadapt suffer less from the downfall of a than their respective non-adaptive counterparts. Analogously,the BDP algorithm provides better performance in the intermediate portion of the simulation, compared to AM (seeFig. 11b). Notice in passing that the SKM diverges as a undergoes its downward transition. On the whole, the BDP

05
10152025
0 5 10 15x 104
0–5
510152025
Time Steps0 0.25 0.5 0.75 1 1.25 1.5 1.75 2
x 105Time Steps0
x 105Time Steps
–5
0.25 0.5 0.75 1 1.25 1.5 1.75 2
Fig. 11. Noise reduction for signals with time-varying degree of impulsiveness: (a and b) square wave variation of a ða ¼ 1:5Þ and (c–f) sinusoidal wave
variation of a, with (c and d) conservative ða ¼ 1:1Þ and (e and f) averaged ða ¼ 1:5Þ initial setting; (a, c, e) FLOM- and (b, d, f) AT-based algorithms.
M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–40 39
algorithm achieves the best performance trade-off among the various signal portions, regarding both convergence speedand steady-state noise reduction.
Regarding the sinusoidal test, where a varies continuously in the range [1.1, 1.9], two different initial settings have beenanalyzed, namely a conservative one, using the minimum value that a can assume (a ¼ 1:1, see Fig. 11c and d), and anaverage initial setting (a ¼ 1:5, see Fig. 11e and f). All the algorithms – and more markedly SKM and AM – tend to convergemore slowly with the conservative initial setting. Furthermore, once the steady-state is reached, the correspondingreduction level is maintained more consistently, since a is never overestimated and also due to the reduced reactivity ofthis setting to the a variations (low step size). On the other hand, a great performance loss is experienced with theaveraged setting when a drops to values smaller than a. Finally, in both cases the BDP achieves the best trade-off betweenconvergence speed and steady-state reduction, while the SKM and AM are the most problematic algorithms. Notice, inpassing, that FxLMPest and FxLMADadapt outperform their respective non-adaptive counterparts in terms of speed.
5.5. Effect of measurement noise at the microphones
In practice, the microphones used in the ANC setting may be affected by measurement noise. Some further simulationanalysis has been conducted to explore the impact of this additional noise. Concerning the noise on the error microphone,one can observe that the ANC scheme is designed to minimize the spectral component of the error that is correlated withthe reference noise, so that the effect of an additional noise, not correlated with x(n), is essentially neglectable regardingthe attenuation capabilities, although the convergence properties may be partially worsened (see, e.g., [1]). On the otherhand, the measurement noise associated with the reference sensor is of greater concern, and is known to reduce thecancellation performance even in a Gaussian setting. Peculiar to the studied problem is that the considered referencesignal has infinite variance for ao2. In practice, this implies that adding a further Gaussian noise (with finite variance) onthe reference signal has a limited effect. Simulation testing shows that the presence of noise at the reference microphoneindeed affects the noise reduction capabilities, with a much more intense degradation effect for higher a values.
6. Conclusions
Classical feedforward ANC schemes are generally designed to obtain the attenuation of Gaussian noise signals usingsuitable adaptive signal processing algorithms. The rejection of non-Gaussian impulsive noise signals represents a muchmore critical task, with respect to which standard ANC algorithms generally fail to provide a satisfactory solution, due toconvergence and instability problems.
The proposed solutions to this problem are generally based on the concept of perturbing as little as possible the filterweight update process by discarding or partially discounting samples associated with out-of-scale samples. To thispurpose, SaS distributions are used to model non-Gaussian noise signals and very efficient algorithms can be devisedbased on the characteristics of those distributions. However, the performance of these algorithms is extremely dependenton the accuracy of the available information regarding the probabilistic characteristics of the noise signal.
The paper emphasizes the difficulty in obtaining sufficiently reliable information to correctly set the parameters of thenoise SaS distribution in the algorithms previously introduced in the literature and takes them a step further bycomplementing them with an on-line recursive procedure for the estimation of the critical characteristic exponent. TwoFLOM-based algorithms are then proposed, one extending the FxLMP, and one improving the computationally lessdemanding FxLMAD algorithm with a step size adaptation mechanism. The FxLMPest is experimentally shown to achievealmost the same performance as the FxLMP, which is known to provide excellent performance if correctly set with the

M. Bergamasco et al. / Journal of Sound and Vibration 331 (2012) 27–4040
distribution characteristics, but avoiding the use of any a priori information. The FxLMADadapt shares the same robustnessas the FxLMAD but is generally capable of achieving faster convergence with nearly-Gaussian noise signals.
Furthermore, the use of a computationally simple estimation scheme based on the well-known BP approach, thatprovides suitable amplitude bounds for outlier detection, is proposed to enhance AT-based algorithms for the ANC ofimpulsive noise. A recursive estimation scheme based on a sliding window approach keeps the amplitude bounds constantlytuned to the signal characteristics. Following other approaches previously proposed in the literature, the outlier values of thereference and error signals are then saturated to the thresholds in the weight update equation. Simulation analysis showsthat the resulting adaptive algorithm, denoted BDP, provides an ideal trade-off between steady-state noise reduction andspeed of convergence in all situations.
Acknowledgments
This work has been partially supported by the Italian Ministry of University and Research project ‘‘Identification andadaptive control of industrial systems’’.
References
[1] S.M. Kuo, D.R. Morgan, Active Noise Control Systems: Algorithms and DSP Implementations, Wiley-Interscience, New York (NY), USA, 1996.[2] S.J. Elliott, Signal Processing for Active Control, Academic Press, San Diego (CA), USA, 2001.[3] M. Shao, C.L. Nikias, Signal processing with fractional lower order moments: stable processes and their applications, Proceedings of the IEEE 81 (1993)
986–1010.[4] P.G. Georgiou, P. Tsakalides, C. Kyriakakis, Alpha-stable modeling of noise and robust time-delay estimation in the presence of impulsive noise, IEEE
Transactions on Multimedia 1 (1999) 291–301.[5] R. Leahy, Z. Zhou, Y. Hsu, Adaptive filtering of stable processes for active attenuation of impulsive noise, in: Proceedings of the International
Conference on Acoustics Speech and Signal Processing, vol. 5, pp. 2983–2986.[6] M.C. Pan, J.Y. Liu, Active shock noise cancellation with variable step-size algorithms, in: Proceedings of the IEEE International Conference on
Information Acquisition, vol. 5, Hong Kong and Macau, China, pp. 198–203.[7] M.T. Akhtar, W. Mitsuhashi, Improving performance of FxLMS algorithm for active noise control of impulsive noise, Journal of Sound and Vibration
327 (2009) 647–656.[8] X. Sun, S.M. Kuo, G. Meng, Adaptive algorithm for active control of impulsive noise, Journal of Sound and Vibration 291 (2006) 516–522.[9] C.L. Nikias, M. Shao, Signal Processing with Alpha-Stable Distributions and Applications, Wiley-Interscience, New York (NY), USA, 1995.
[10] P. Kidmose, Alpha-stable distributions in signal processing of audio signals, in: Proceedings of the 41st Conference on Simulation and Modelling,Scandinavian Simulation Society, SIMS2000, pp. 87–94.
[11] P.J. Brockwell, D.B.H. Cline, Linear prediction of ARMA processes with infinite variance, Stochastic Processes and their Applications 19 (1985) 281–296.[12] J.W. Tukey, Exploratory Data Analysis, Addison-Wesley, Reading, MA, 1977.[13] P. Rousseeuw, A. Leroy, Robust Regression and Outlier Detection, Wiley, 1996.[14] W. Chauvenet, A Manual of Spherical and Practical Astronomy, Dover, 1960.[15] F. Grubbs, Procedures for detecting outlying observations in samples, Technometrics 11 (1969) 1–21.[16] W. Stefansky, Rejecting outliers in factorial designs, Technometrics 14 (1972) 469–479.[17] G.L. Tietjen, R.H. Moore, Some Grubbs-type statistics for the detection of outliers, Technometrics 14 (1972) 583–597.[18] B. Rosner, Percentage points for a generalized ESD many-outlier procedure, Technometrics 25 (1983) 165–172.[19] V. Barnett, T. Lewis, Outliers in Statistical Data, Wiley, 1994.