Embed Size (px)
Citation preview

Active Fault Tolerant Control of Quad-Rotor Helicopter
Professor :
Dr. Youmin Zhang
20/11/2010 1
Sara Ghasemi
Farzad Baghernezhad

Contents
2/17
Quad-rotor Model
PID Controller
Comparison
Conclusion
Active Fault Tolerant Control
of Quad-Rotor Helicopter
Fault Detection
Sliding Mode Controller

4/8
Quad-rotor ModelActive Fault Tolerant Control
of Quad-Rotor Helicopter
6 degrees of freedom body
4 rotor 4 controllable variables
3/17

• Quad-rotor dynamics
Active Fault Tolerant Control
of Quad-Rotor Helicopter
4/17
X. Zhang, Y. Zhang, “Fault Tolerant Control for Quad-rotor UAV by Employing Lyapunov- based Adaptive
Control Approach”, AIAA Guidance, Navigation, and Control Conference, Toronto, Canada, Aug. 2010.
Quad-rotor Model

failuredanger
Unacceptable
performance
degraded
performance
Normal
system
Fault
occurs
M. Witczak, Modelling and Estimation Strategies for Fault Diagnosis of Non-Linear Systems,
Berlin : Springer, 2007.
Active Fault Tolerant Control
of Quad-Rotor Helicopter
5/17
Fault Detection

Fault Detection
Active Fault Tolerant Control
of Quad-Rotor Helicopter
Residual Generation
oExtended Kalman Filter (EKF)
Residual Evaluation
oThreshold test on the residual value (limit
checking)
6/17

Fault Detection: Residual Generation
• System equation in state space form
7
Active Fault Tolerant Control
of Quad-Rotor Helicopter
Extended Kalman Filter
7/17

Fault detection: Residual Evaluation
8
Time window 10 iterations
Threshold
Active Fault Tolerant Control
of Quad-Rotor Helicopter
8/17

PID ControllerActive Fault Tolerant Control
of Quad-Rotor Helicopter
30 20 24
9/17

PID ControllerActive Fault Tolerant Control
of Quad-Rotor Helicopter
0 1 2 3 4 50
0.5
1
1.5
time
altitude
reference altitude
real altitude
0 1 2 3 4 5-0.04
-0.02
0
0.02
0.04
time
altitude e
rror
altitude error
0 1 2 3 4 50
2
4
6
8
10
time
z C
ontr
olle
r
Z Controller
0 1 2 3 4 50
0.5
1
1.5
time
roto
r outp
ut
rotor output
0 1 2 3 4 5-0.5
0
0.5
1
1.5
time
altitude
reference pitch
real pitch
0 1 2 3 4 5-0.1
-0.05
0
0.05
0.1
time
pitch e
rror
pitch error
0 1 2 3 4 5-1
-0.5
0
0.5
1
time
teta
Contr
olle
r
teta Controller
0 1 2 3 4 50.8
0.85
0.9
0.95
1
time
roto
r outp
ut
rotor output
0 1 2 3 4 5-0.5
0
0.5
1
1.5
time
altitude
reference roll
real roll
0 1 2 3 4 5-0.2
-0.1
0
0.1
0.2
time
roll
err
or
roll error
0 1 2 3 4 5-1
-0.5
0
0.5
1
time
phi C
ontr
olle
r
phi Controller
0 1 2 3 4 50.8
0.85
0.9
0.95
1
time
roto
r outp
ut
rotor output
0 1 2 3 4 5-0.5
0
0.5
1
1.5
time
altitude
reference yaw
real yaw
0 1 2 3 4 5-0.2
-0.1
0
0.1
0.2
time
yaw
err
or
yaw error
0 1 2 3 4 5-2
-1
0
1
2
time
psi C
ontr
olle
r
psi Controller
0 1 2 3 4 5
0.8
1
1.2
1.4
time
roto
r outp
ut
rotor output
10/17
PID controller for quad-rotor helicopter

Active Fault Tolerant Control
of Quad-Rotor HelicopterPID and Reconfigured PID
Controller
30% actuator loss 50% actuator loss
Max Error
after fault
Reconfigured
Time
Max Error
after fault
Reconfigured
Time
PID 0.055 7.0 0.145 8.2
Reconfigured
PID0.012 5.9 0.047 7.2
50% Loss of all rotors30% Loss of all rotors
0 5 10 15 201.9
1.95
2
2.05
2.1
time
real and d
esired a
ltitude
desired altitude
PID
reconfigured PID
0 5 10 15 20-0.05
0
0.05
0.1
0.15
time
err
or
reconfigured PID error
PID error
0 5 10 15 200
1
2
3
time
roto
r outp
ut
PID T
reconfigured PID T
5 10 15 20-3
-2
-1
0
1
time
resid
ual
residual
0 5 10 15 201.9
1.95
2
2.05
2.1
time
real and d
esired a
ltitude
desired altitude
PID
reconfigured PID
0 5 10 15 20-0.05
0
0.05
0.1
0.15
time
err
or
reconfigured PID error
PID error
0 5 10 15 200
1
2
3
time
roto
r outp
ut
PID T
reconfigured PID T
5 10 15 20-2
-1.5
-1
-0.5
0
0.5
time
resid
ual
residual
30% Loss of T1
0 5 10 15 201.8
1.9
2
2.1
2.2
time
real and d
esired a
ltitude
desired altitude
PID
reconfigured PID
0 5 10 15 20-0.05
0
0.05
0.1
0.15
time
err
or
reconfigured PID error
PID error
0 5 10 15 200
1
2
3
time
roto
r outp
ut
PID T
reconfigured PID T
5 10 15 20-6
-4
-2
0
2
time
resid
ual
residual
11/17

Active Fault Tolerant Control
of Quad-Rotor HelicopterSliding Mode Controller
D. Lee, H. J. Kim and S. Sastry. “Feedback Linearization vs. Adaptive Sliding Mode Control for a
Quadrotor Helicopter.” International Journal of Control, Automation, and Systems 2009, PP. 419-428
12/17

Sliding Mode ControllerActive Fault Tolerant Control
of Quad-Rotor Helicopter
1 1 7 5 5 10
0 5 10 15 200
0.5
1
1.5
2
2.5
time
altitude
reference altitude
real altitude
5 10 15 201.9
1.95
2
2.05
2.1
time
altitude
reference altitude
real altitude
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
time
each r
oto
r outp
ut
rotor output
13/17
sliding mode control of quad-rotor using sign function

Sliding Mode ControlActive Fault Tolerant Control
of Quad-Rotor Helicopter
Ali J. Koshkouei and Keith J. Burnham. Control of DC Motors Using Proportional Integral Sliding
Mode. Control Theory and Applications Centre, Coventry University, Coventry CV1 5FB, UK.
A. Chamseddine, H. Noura. Control and Sensor Fault Tolerance of Vehicle Active Suspension.
IEEE Transactions on Control Systems Technology, Vol. 16, NO. 3, May 2008, pp. 416- 433.
-5 0 5-1
-0.5
0
0.5
1
S
sat(
s)
sat(s) for phis=1
-5 0 5-1
-0.5
0
0.5
1
S
sat(
s)
sat(s) for phis=0.5
-5 0 5-1
-0.5
0
0.5
1
S
sat(
s)
sat(s) for phis=0.1
-5 0 5-1
-0.5
0
0.5
1
S
sat(
s)
sat(s) for phis=0.01
14/17
0 5 10 15 200
0.5
1
1.5
2
2.5
time
altitude
reference altitude
real altitude
0 5 10 15 201.9
1.95
2
2.05
2.1
time
altitude
reference altitude
real altitude
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
time
each r
oto
r outp
ut
rotor output
sliding mode control of quad-rotor using saturation function
Active Fault Tolerant Control
of Quad-Rotor Helicopter
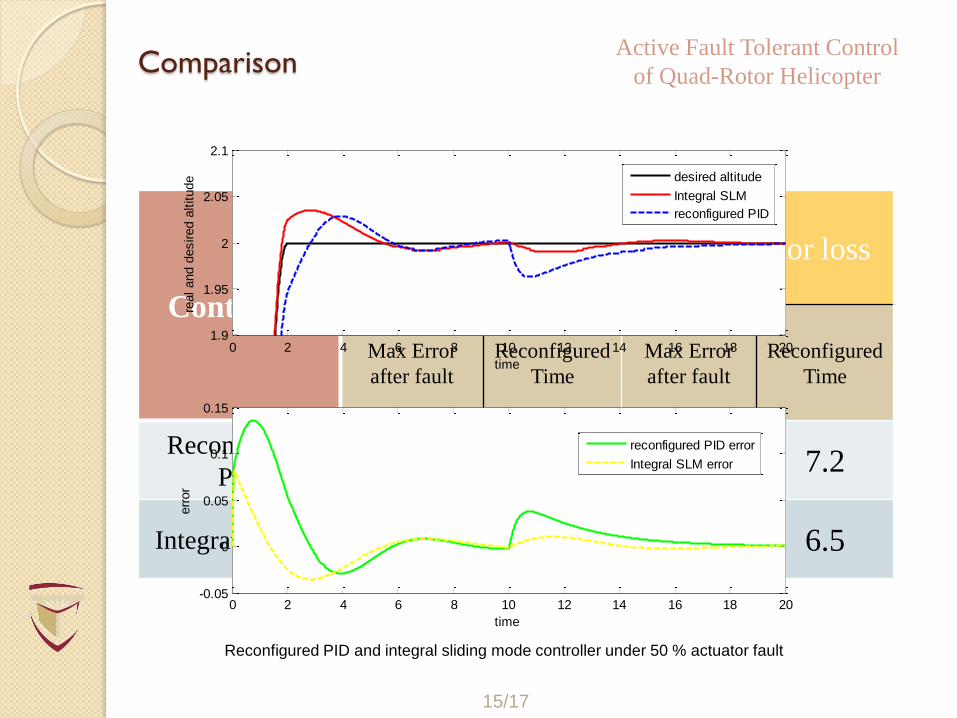
Controller
30% actuator loss 50% actuator loss
Max Error
after fault
Reconfigured
Time
Max Error
after fault
Reconfigured
Time
Reconfigured
PID0.012 5.9 0.047 7.2
Integrated SLM 0.004 2.9 0.011 6.5
0 2 4 6 8 10 12 14 16 18 201.9
1.95
2
2.05
2.1
time
real and d
esired a
ltitude
desired altitude
Integral SLM
reconfigured PID
0 2 4 6 8 10 12 14 16 18 20-0.05
0
0.05
0.1
0.15
time
err
or
reconfigured PID error
Integral SLM error
Reconfigured PID and integral sliding mode controller under 50 % actuator fault
15/17
Comparison

Quad-rotor modeled
PID and Sliding mode controller implemented
PID controller performance in fault tolerant improved by
Extended Kalman filter and gain scheduling
Sliding mode performance improved by adding integral to
sliding surface
Integral sliding mode seems the best between other methods
Active Fault Tolerant Control
of Quad-Rotor HelicopterConclusion
16/17

Active Fault Tolerant Control of Quad-Rotor Helicopter
20/11/2010 17





























