Embed Size (px)
Citation preview
Active Bending Electric Endoscope Using
Shape Memory Alloy Wires
Takumi Kobayashi1, Tadao Matsunaga2 and Yoichi Haga3 1) Graduate School of Engineering, Tohoku University
2) Micro System Integration Center, Tohoku University
3) Graduate School of Biomedical Engineering, Tohoku University
1
International Workshop and Summer School on Medical and Service Robotics
July 2014, EPFL Lausanne
1. Background
Endoscopy
Previous study
Method
2. Multidirectional bending mechanism
Outline
Multi bending device
4. Conclusion
5mm
Principle, Structure, Measurement
2
3. Active bending electric endoscope Structure
Measurement of bending angle
Measurement of surface temperature
Active bending electric endoscope system
Motion
Discussion
5mm
Active bending electric endoscope
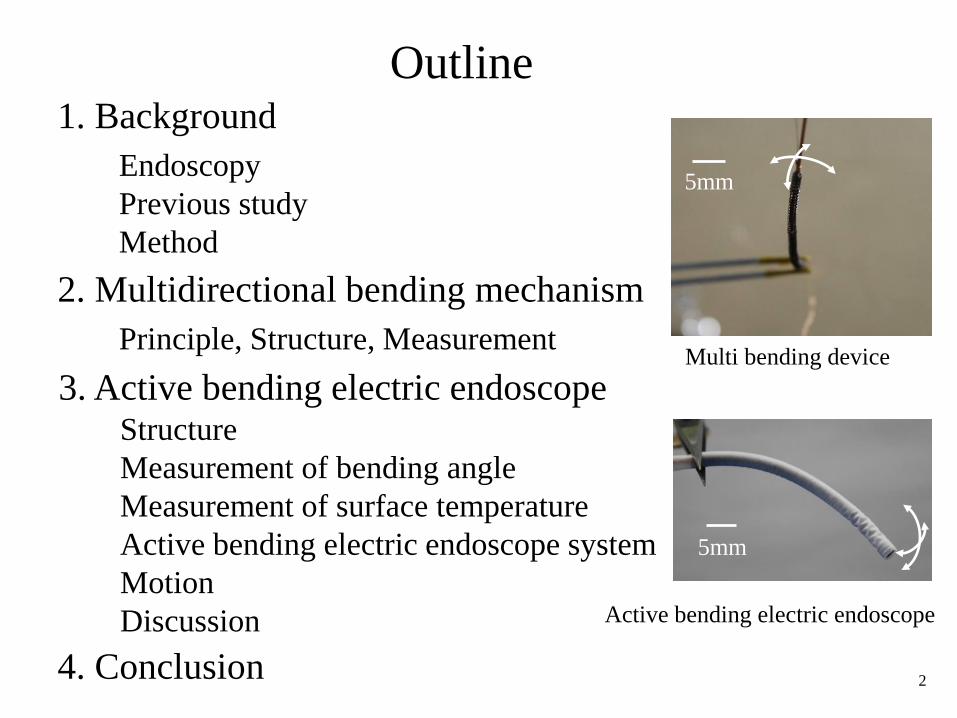
Endoscopy is widely used as minimally invasive therapy
・Disposable
・High insert ability
・Ability to observe and bend
・Reusable
・Infection due to lack of cleaning
・Disinfection and sterilization time
Bending part
Wire
Shaft
Background 1:Endoscopy
Shaft
Inserting endoscope from nose
Pylorus Endoscope
Stomach End
osco
pe
Work
ing
chan
nel
Invo
lved
area
Field lens Light
Stomach
Endoscope Snare
Involved part
Conventional endoscope structure
Angle knob
3
For upper digestive
*W. Makishi et al., The Institute of Electrical Engineers of Japan E, 2011
5 mm
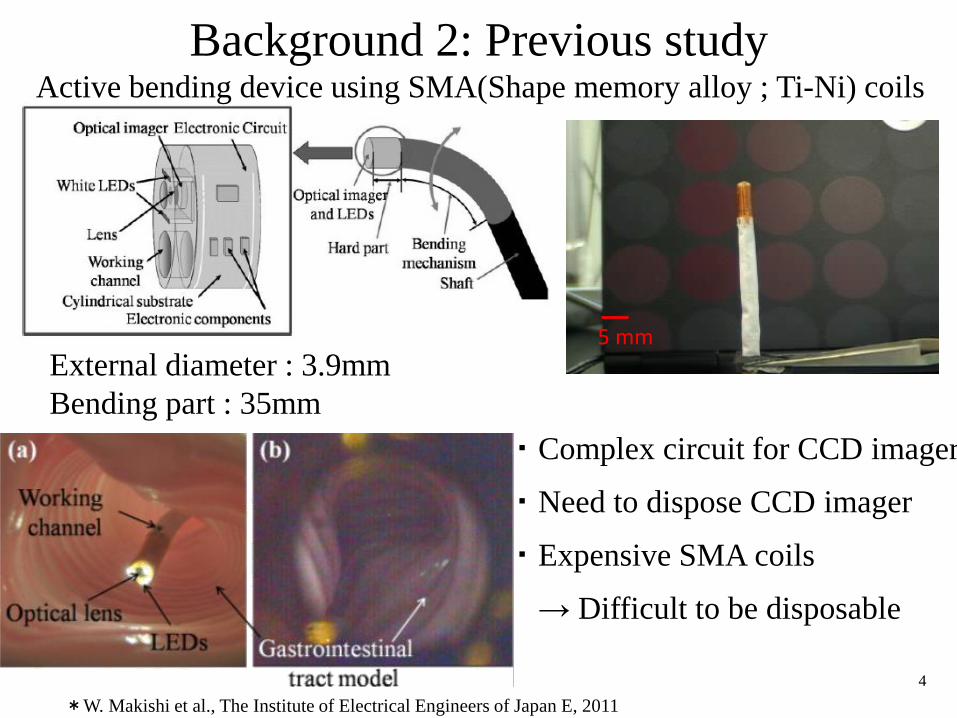
Background 2: Previous study Active bending device using SMA(Shape memory alloy ; Ti-Ni) coils
External diameter : 3.9mm
Bending part : 35mm
・Complex circuit for CCD imager ・Need to dispose CCD imager ・Expensive SMA coils → Difficult to be disposable
4
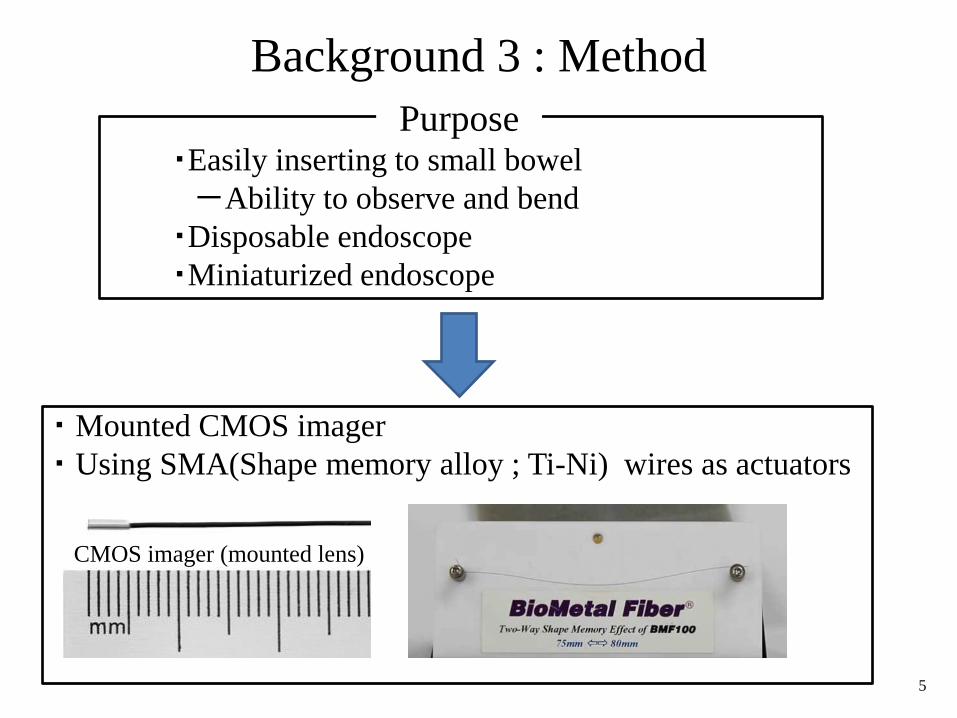
Background 3 : Method
・Easily inserting to small bowel
-Ability to observe and bend
・Disposable endoscope
・Miniaturized endoscope
CMOS imager (mounted lens)
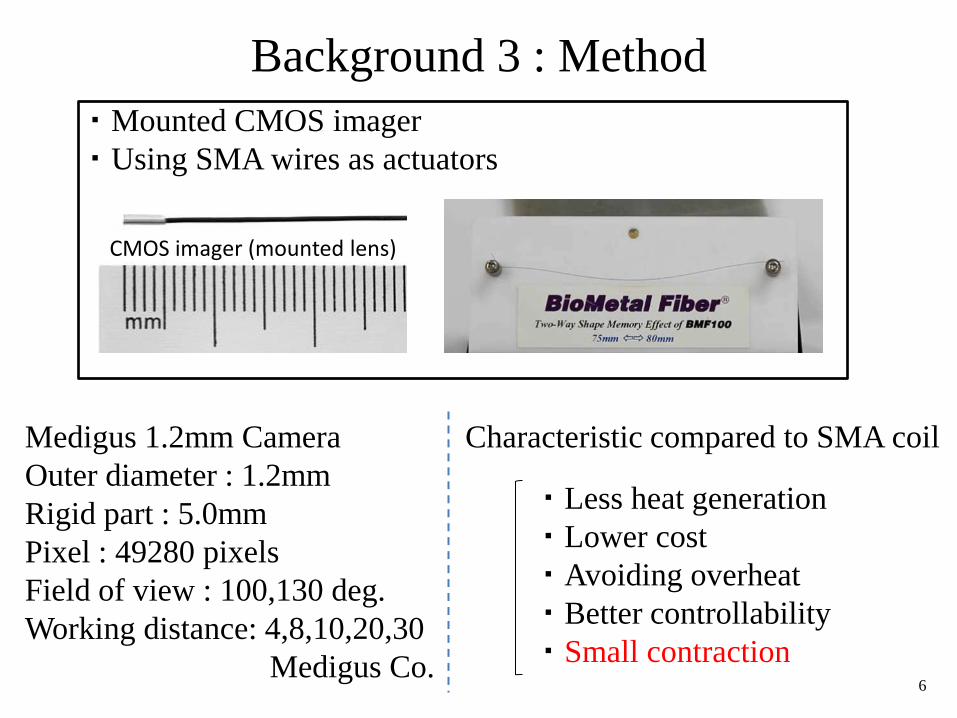
・Mounted CMOS imager
・Using SMA(Shape memory alloy ; Ti-Ni) wires as actuators
5
Purpose
Background 3 : Method
CMOS imager (mounted lens)
・Mounted CMOS imager
・Using SMA wires as actuators
Medigus 1.2mm Camera
Outer diameter : 1.2mm
Rigid part : 5.0mm
Pixel : 49280 pixels
Field of view : 100,130 deg.
Working distance: 4,8,10,20,30
Medigus Co.
・Less heat generation
・Lower cost
・Avoiding overheat
・Better controllability
・Small contraction
Characteristic compared to SMA coil
6
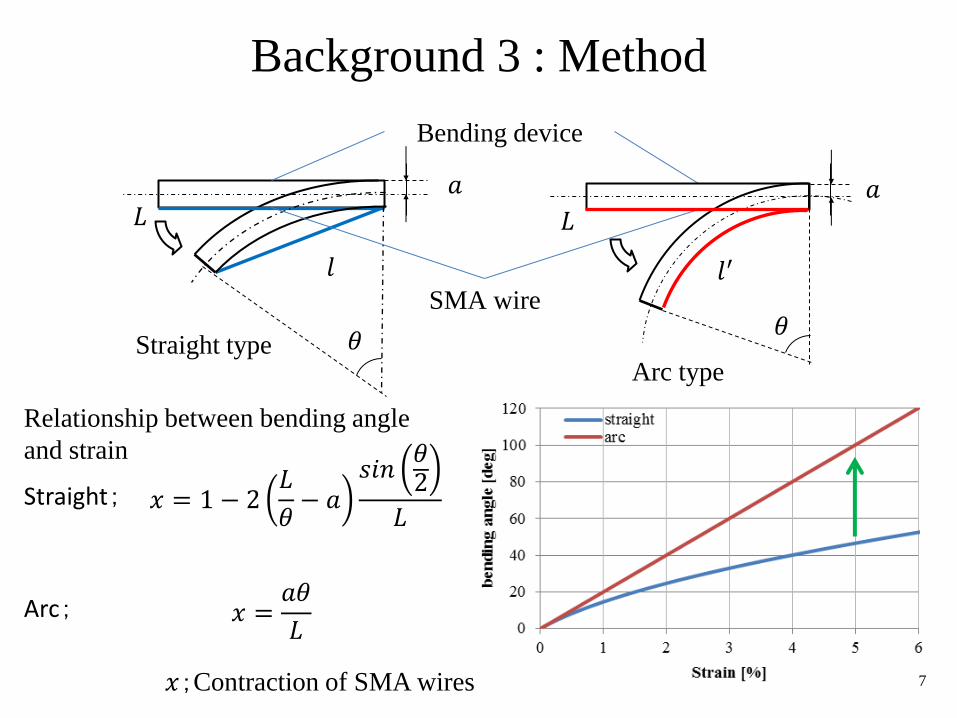
𝑥 = 1 − 2𝐿
𝜃− 𝑎
𝑠𝑖𝑛𝜃2
𝐿
Arc type
𝑎
𝜃
𝐿
𝑙′
Straight type
SMA wire
Bending device
𝑎
𝜃
𝐿
𝑙
𝑥;Contraction of SMA wires
𝑥 =𝑎𝜃
𝐿
Relationship between bending angle
and strain
Straight;
Arc;
Background 3 : Method
7
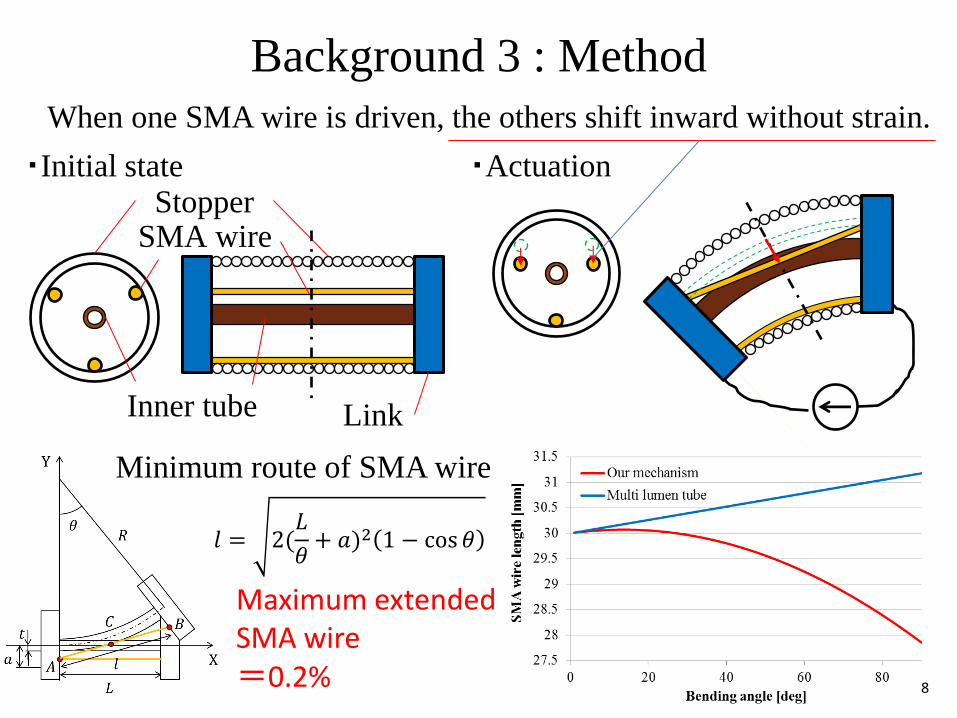
・Actuation ・Initial state
SMA wire
Inner tube
Stopper
Link
𝑙 = 2(𝐿
𝜃+ 𝑎)2 1 − cos 𝜃
Minimum route of SMA wire
Maximum extended SMA wire =0.2%
When one SMA wire is driven, the others shift inward without strain.
Background 3 : Method
8
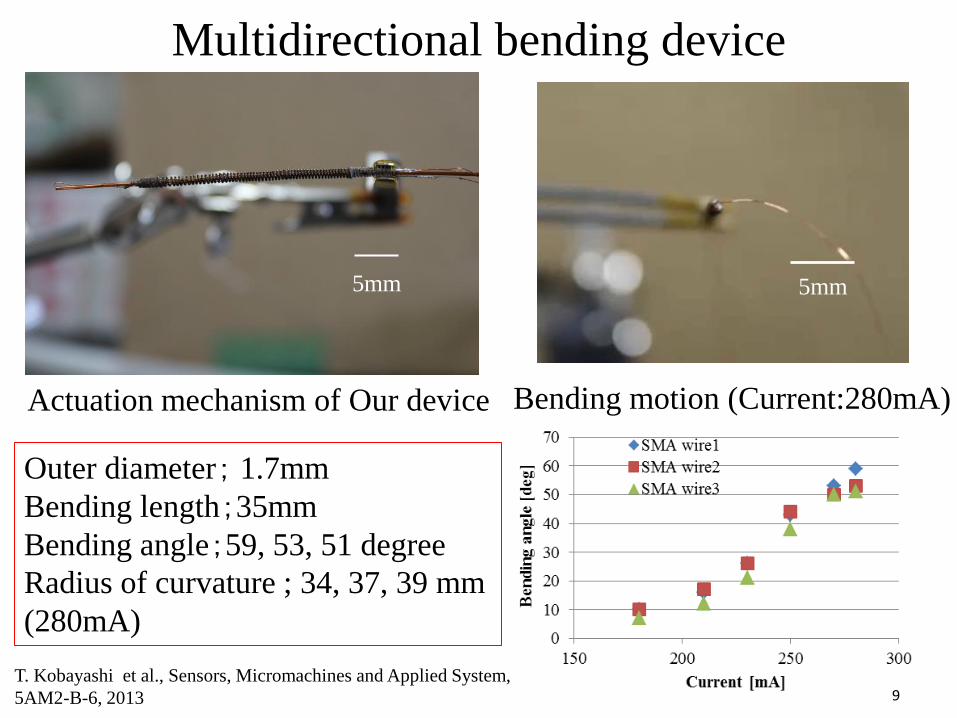
Outer diameter; 1.7mm
Bending length;35mm
Bending angle;59, 53, 51 degree
Radius of curvature ; 34, 37, 39 mm
(280mA)
T. Kobayashi et al., Sensors, Micromachines and Applied System,
5AM2-B-6, 2013 9
Bending motion (Current:280mA)
5mm 5mm
Actuation mechanism of Our device
Multidirectional bending device
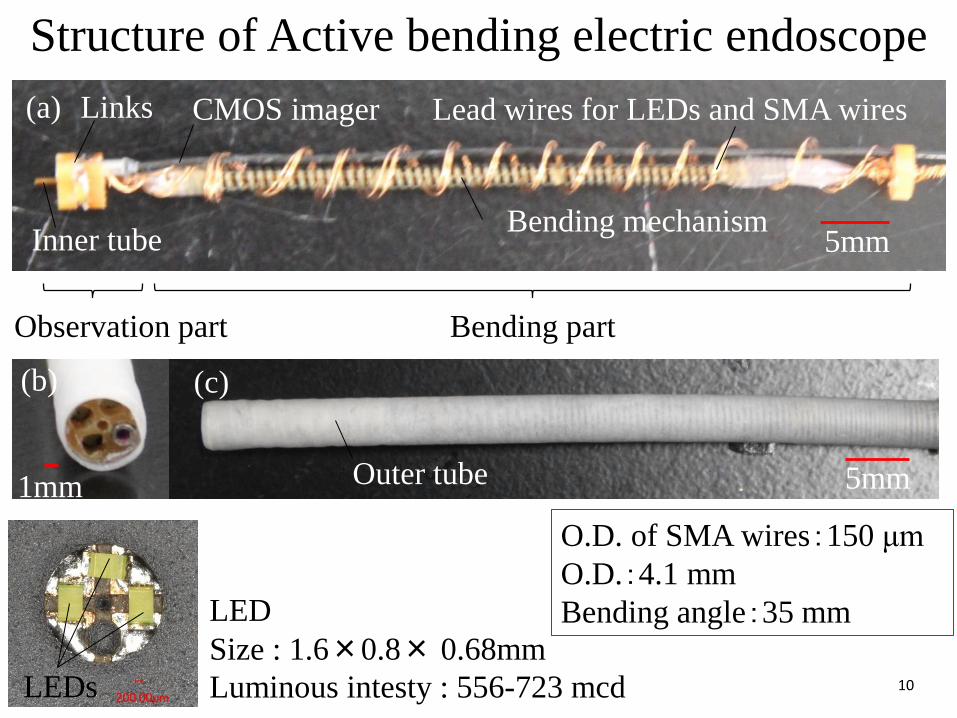
1mm 5mm Outer tube
(b) (c)
Structure of Active bending electric endoscope
Observation part Bending part
5mm
CMOS imager
Bending mechanism
Lead wires for LEDs and SMA wires Links (a)
Inner tube
O.D. of SMA wires:150 μm
O.D.:4.1 mm
Bending angle:35 mm
LEDs 10
LED
Size : 1.6×0.8× 0.68mm
Luminous intesty : 556-723 mcd
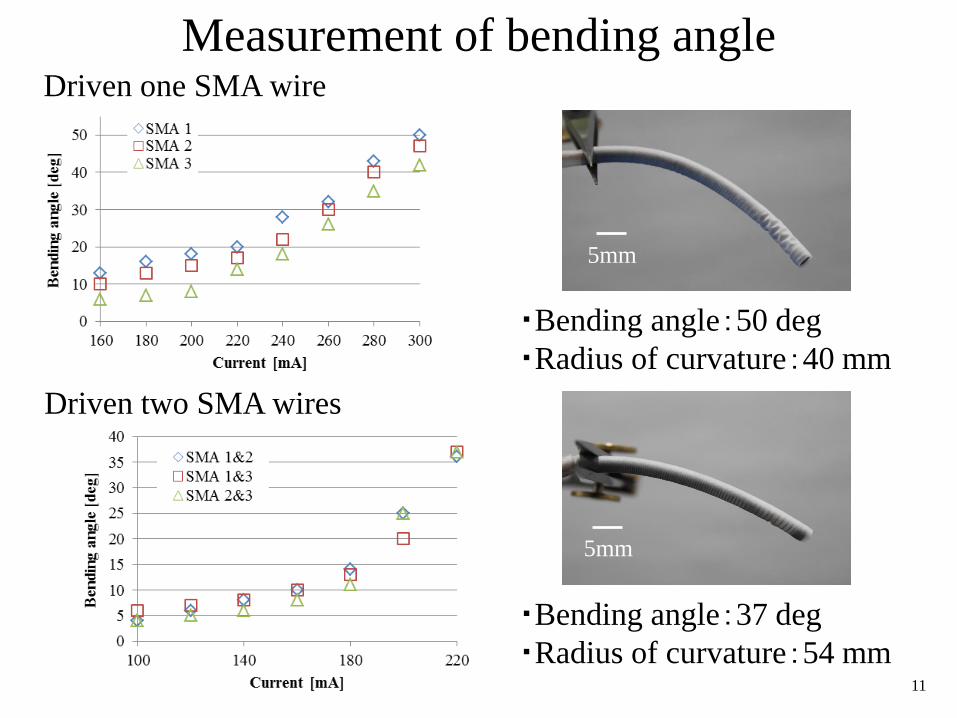
Driven one SMA wire
Driven two SMA wires
・Bending angle:50 deg
・Radius of curvature:40 mm
・Bending angle:37 deg
・Radius of curvature:54 mm
Measurement of bending angle
11
5mm
5mm
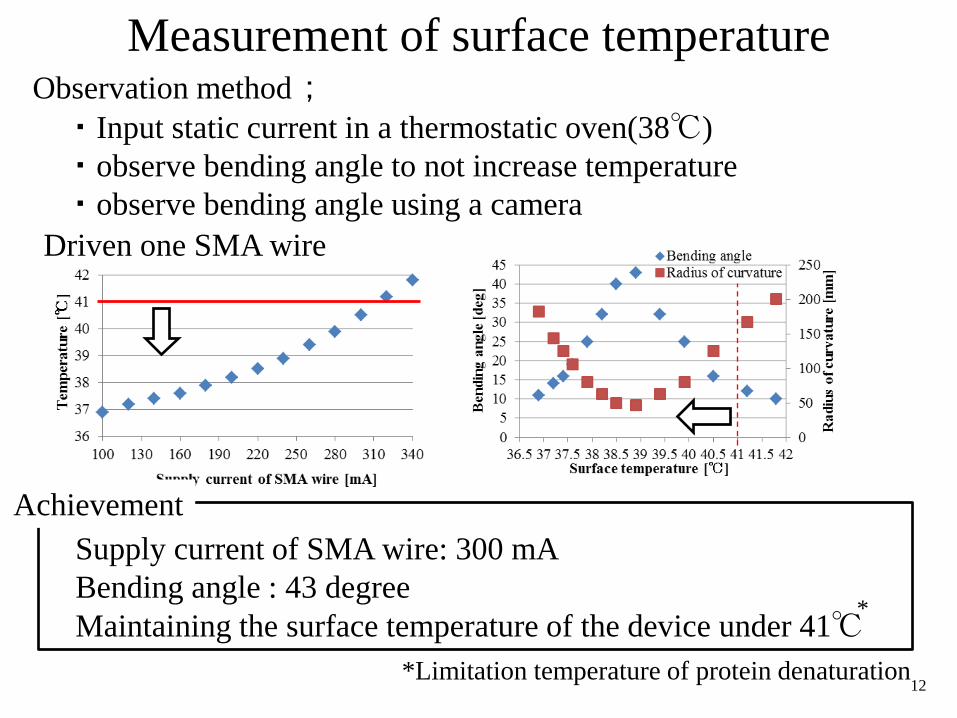
Observation method; ・Input static current in a thermostatic oven(38℃)
・observe bending angle to not increase temperature
・observe bending angle using a camera
Measurement of surface temperature
Supply current of SMA wire: 300 mA
Bending angle : 43 degree
Maintaining the surface temperature of the device under 41℃
Achievement
*Limitation temperature of protein denaturation
*
Driven one SMA wire
12
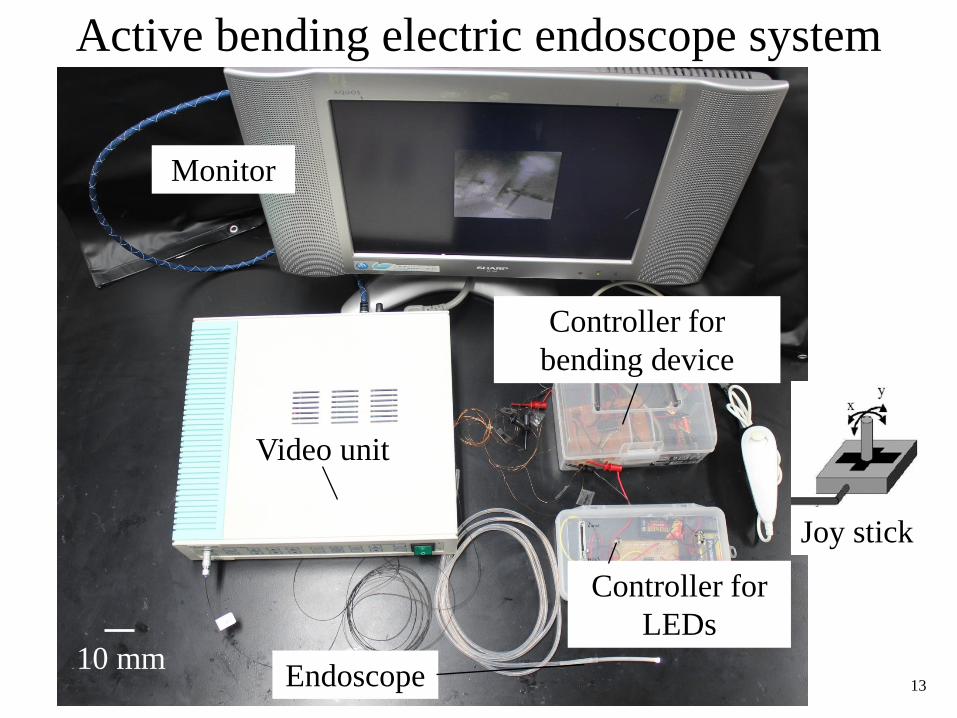
Active bending electric endoscope system
Video unit
Monitor
Controller for
bending device
Controller for
LEDs
Endoscope
Joy stick
13
10 mm
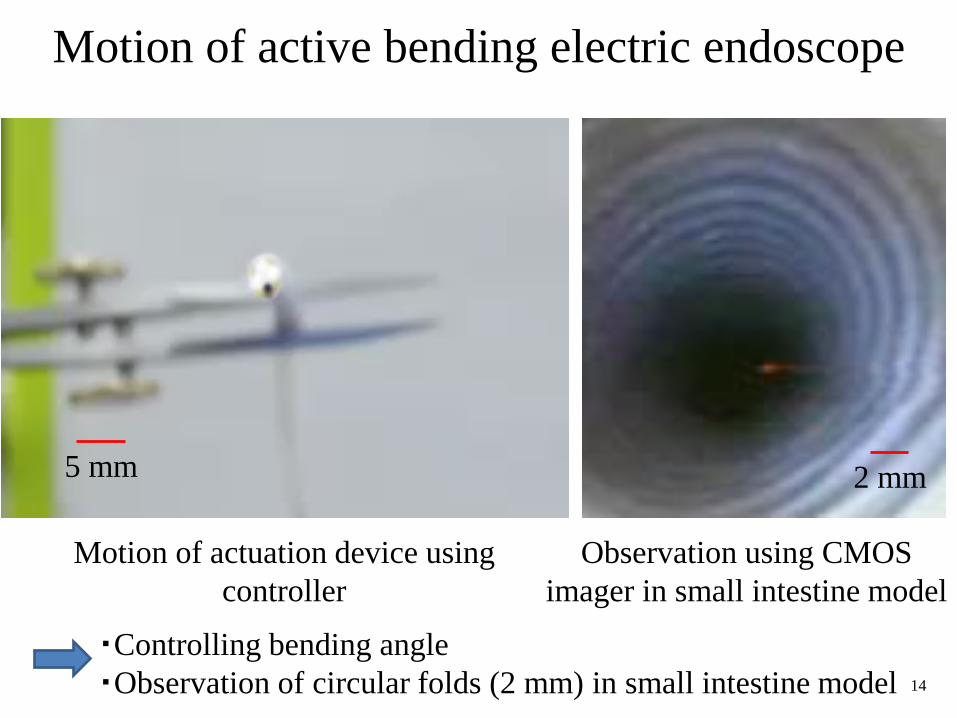
Motion of active bending electric endoscope
5 mm 2 mm
Motion of actuation device using
controller
Observation using CMOS
imager in small intestine model
14
・Controlling bending angle
・Observation of circular folds (2 mm) in small intestine model

Discussion
15
556-723 mcd
High illumination intensity
Size :
Luminous intensity :
1.6×0.8× 0.68mm
61.7 cd
1.6×1.6× 1.44mm
Cree Inc. LED paradise
(Store)
Cardia
Pylorus
Stomach model
inspection of stenosed lesion of
the small intestine
Observation of circular folds
(2 mm) in small intestine model
Application
navigation from cardia to pylorus
×85
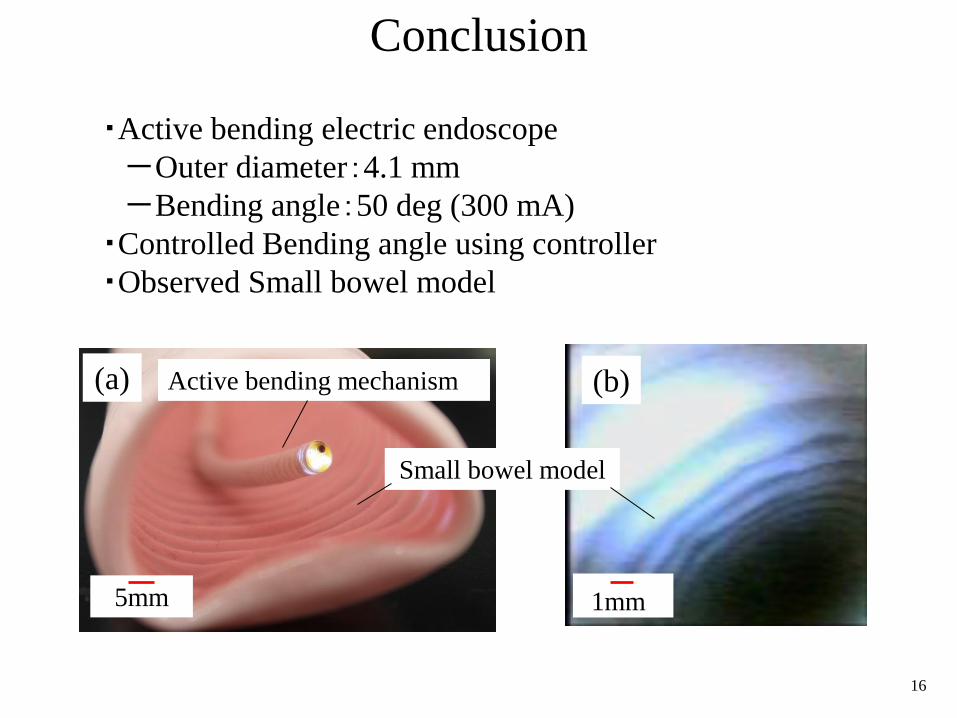
Conclusion
・Active bending electric endoscope
-Outer diameter:4.1 mm
-Bending angle:50 deg (300 mA)
・Controlled Bending angle using controller
・Observed Small bowel model
5mm 1mm
Small bowel model
Active bending mechanism (a) (b)
16
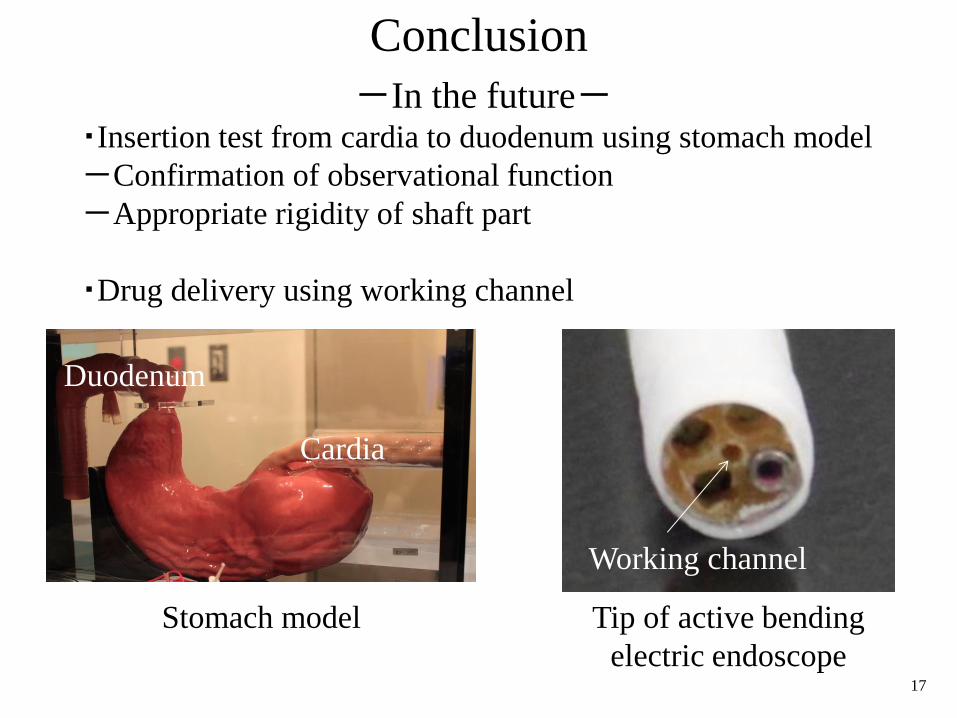
Conclusion
-In the future- ・Insertion test from cardia to duodenum using stomach model
-Confirmation of observational function
-Appropriate rigidity of shaft part
・Drug delivery using working channel
Stomach model
Working channel
Duodenum
Cardia
Tip of active bending
electric endoscope 17
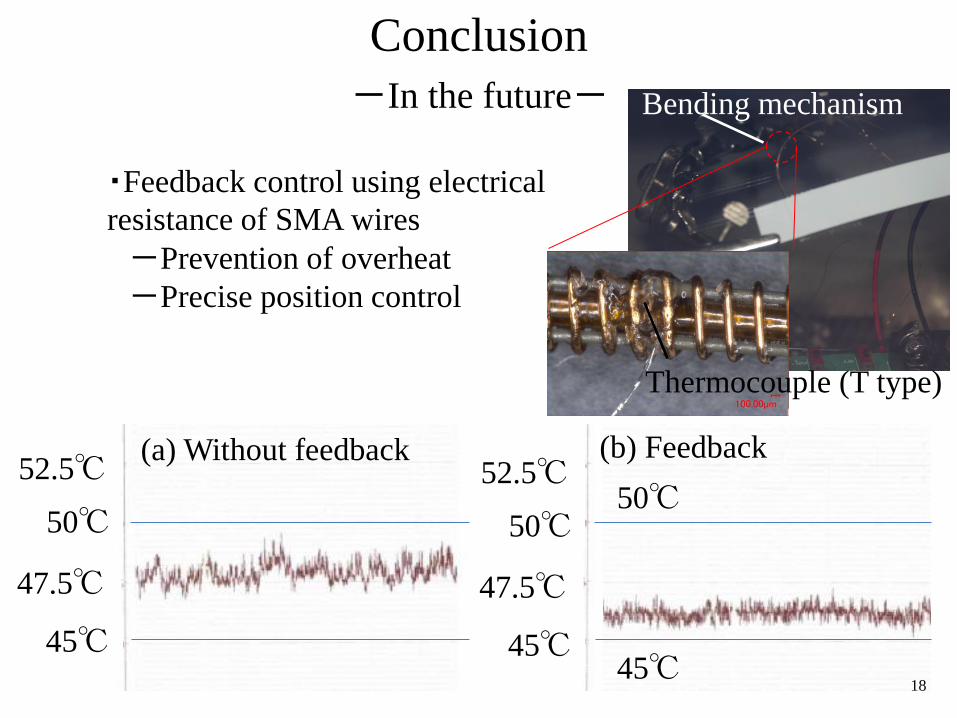
Conclusion
-In the future-
・Feedback control using electrical
resistance of SMA wires
-Prevention of overheat
-Precise position control
45℃
50℃
(b) Feedback (a) Without feedback
45℃
50℃
18
47.5℃
52.5℃
45℃
50℃
47.5℃
52.5℃
Bending mechanism
Thermocouple (T type)











![The endoscope and instruments for minimally invasive ... › 29...forefront[20] and developed the concept of “endoscope guided surgery” for cases such as colloid cysts. Endoscope](https://img.pdfslide.us/doc/110x75/60d6c0583677e24b0e2e5813/the-endoscope-and-instruments-for-minimally-invasive-a-29-forefront20.jpg)