Embed Size (px)
Citation preview

Ocean Modelling 38 (2011) 41–70
Contents lists available at ScienceDirect
Ocean Modelling
journal homepage: www.elsevier .com/locate /ocemod
Accurate Boussinesq oceanic modeling with a practical, ‘‘Stiffened’’ Equation of State
Alexander F. Shchepetkin ⇑, James C. McWilliamsInstitute of Geophysics and Planetary Physics, University of California, 405 Hilgard Avenue, Los Angeles, CA 90095-1567, United States
a r t i c l e i n f o a b s t r a c t
Article history:Received 9 August 2008Received in revised form 25 December 2010Accepted 31 January 2011Available online 13 February 2011
Keywords:Seawater Equation of StateSeawater compressibilityBarotropic–baroclinic mode splittingBoussinesq and non-Boussinesq modelingNumerical stability
1463-5003/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.ocemod.2011.01.010
⇑ Corresponding author.E-mail addresses: [email protected] (A.F. Shche
(J.C. McWilliams).
The Equation of State of seawater (EOS) relates in situ density to temperature, salinity and pressure. Mostof the effort in the EOS-related literature is to ensure an accurate fit of density measurements under theconditions of different temperature, salinity, and pressure. In situ density is not of interest by itself in oce-anic models, but rather plays the role of an intermediate variable linking temperature and salinity fieldswith the pressure-gradient force in the momentum equations, as well as providing various stability func-tions needed for parameterization of mixing processes. This shifts the role of EOS away from representa-tion of in situ density toward accurate translation of temperature and salinity gradients into adiabaticderivatives of density.
In this study we propose and assess the accuracy of a simplified, computationally-efficient algorithmfor EOS suitable for a free-surface, Boussinesq-approximation model. This EOS is optimized to addressall the needs of the model: notably, computation of pressure gradient – it is compatible with the monot-onized interpolation of density needed for the pressure gradient scheme in sigma-coordinates of Shche-petkin and McWilliams (2003), while more accurately representing the pressure dependency of thethermal expansion and saline contraction coefficients as well as the stability of stratification; it facilitatesmixing parameterizations for both vertical and lateral (along neutral surfaces) mixing; and it leads to asimpler, more robust, numerically stable barotropic–baroclinic mode splitting without the need of exces-sive temporal filtering of fast mode. In doing so we also explore the implications of EOS compressibilityfor mode splitting in non-Boussinesq free-surface models with the intent to design a comparatively accu-rate algorithm applicable there.
� 2011 Elsevier Ltd. All rights reserved.
1. Role of EOS in oceanic modeling
The Equation of State (EOS) relates the in situ density of seawa-ter with its temperature (or potential temperature), salinity, andpressure (H, S, P, respectively),
q ¼ qEOSðH; S; PÞ: ð1:1Þ
In a Boussinesq-approximation oceanic modeling code, in situ den-sity does not appear by itself (since it is replaced by a constant ref-erence density). Instead EOS and EOS-related quantities are neededfor the following computations:
� Pressure-gradient force (PGF);� Vertically averaged density �q and the effective dynamic density
for the barotropic mode q⁄ (vertically integrated pressure nor-malized by gD2/2 where g is acceleration of gravity and D is
ll rights reserved.
petkin), [email protected]
the local column thickness), both of which participate in baro-tropic–baroclinic mode-splitting algorithm of Shchepetkin andMcWilliams (2005,);� Stability of stratification as well as external thermodynamic
forcing (surface buoyancy flux) needed for mixing and plane-tary boundary layer parameterizations;� Slope of neutral surfaces needed for horizontal (along-isopyc-
nal) mixing (Griffies et al., 1998).
The purpose of this study is to review the present oceanic mod-eling practices for using EOS in these roles, focusing on the effectsassociated with seawater compressibility, and it assesses the con-sequences of the Boussinesq approximation in the context of arealistic EOS. The present study extends the analysis of conse-quences of Boussinesq approximation from Shchepetkin andMcWilliams (2008).
This paper is organized as follows: Section 2 makes a overviewof the Boussinesq approximation, analyzes the errors associatedwith using realistic seawater EOS, and introduces stiffening ofEOS as a method to reduce these errors. Section 3 examines theconsequences of finite compressibility of seawater for the fouralgorithmic roles outlined above, to establish requirements for

42 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
the most suitable functional form of EOS. Special attention is givento barotropic–baroclinic mode-splitting since this subject is rarelydiscussed in the literature. Section 4 introduces a practical form ofEOS and makes estimates of its accuracy. Section 5 explores theconsequences of eliminating the Boussinesq approximation withthe emphasis on accuracy of barotropic–baroclinic mode-splittingalgorithm in the context of finite compressibility of seawater. Sec-tion 6 is the conclusion.
2. Boussinesq approximation and EOS stiffening
The Boussinesq approximation (e.g., Spiegel and Veronis, 1960;Zeytounian, 2003, among others) replaces in situ density q with aconstant reference value q0 in all places where it plays the roleof a measure of inertia, i.e., everywhere except where multipliedby the acceleration of gravity g. The velocity field becomes non-divergent (incompressible) because the continuity equationchanges its meaning from mass to volume conservation. This re-verses the role of EOS from computing specific volume in amass-conserving model to density q in a volume-conserving one.The conservation laws (momentum, energy, tracer content, etc.)are changed from mass-to volume-integrated; the thermodynam-ics is reduced to Lagrangian conservation (advection and diffusion)of H and S, while heating/cooling of fluid by adiabatic compres-sion/expansion is neglected (except in the definition of potentialtemperature itself) and mechanical energy dissipated by viscosityis considered ‘‘lost’’ rather than converted into heat (Mihaljan,1962). If EOS is a linear function of H and S, mass is conserved(along with volume) as a consequence of, and to the same degreeas, the conservation of H and S; external heating/cooling producesa decrease/increase in mass, while keeping volume constant; andnonlinear EOS causes a Boussinesq model to conserve only volume,but no longer mass, even in the absence of external forcing.
The Boussinesq approximation brings simplifications by elimi-nating mass-weighting in a finite-volume code and limiting therole of EOS to the four purposes stated in Section 1. Except in thepart of pressure-gradient term associated with perturbation of freesurface in a free-surface model, q itself can be replaced with itsperturbation, q0 = q � q0, because it appears only inside spatialderivatives (ultimately linked to the gradients of H and S) and onlyin the context of buoyancy commonly defined as �gq0/q0, i.e., nor-malized by q0, whereas the equations can always rewritten in sucha way that q0 itself appears only in the context of this normaliza-tion and nowhere else. The Boussinesq approximation facilitatesthe barotropic–baroclinic mode-splitting in a pair of vertically-integrated free-surface and momentum equations, effectivelyuncoupling EOS from the barotropic mode. The incompressibilityassumption eliminates acoustic waves regardless of whether thehydrostatic approximation is made.
However, physically important effects associated with seawater– cabbeling and thermobaricity – fundamentally require pressure-dependency in EOS and lead to the common practice of using thefull non-approximated EOS, thus retaining its full compressibilityeven in an otherwise dynamically incompressible Boussinesq mod-el. This obscures the concept of buoyancy because it can no longerbe equated to the density (or potential density) anomaly, and canno longer be viewed as a Lagrangianly-conserved properly of thefluid, even thought H and S are. A related, frequently used approx-imation is the replacement of the full in situ pressure P in EOS (1.1)with its bulk hydrostatic reference value, P ? �q0gz, when com-puting q from the model prognostic variables, H and S, henceneglecting pressure variation due to baroclinic effects and essen-tially decoupling EOS pressure from the dynamic.
Under most offshore oceanic conditions q varies by � ± 3% rel-ative to its reference value; this leads to errors associated with the
Boussinesq approximation which can be subdivided into twocategories:
(i) errors relative to not using the Boussinesq approximationincluding not only quantitative, but conceptual as well, i.e.,excluded physical processes and/or missing/altered conser-vation laws; and
(ii) conflicts and internal inconsistencies caused the use of arealistic seawater EOS with full compressibility effectswithin a Boussinesq oceanic model.
Errors of type (i) are widely discussed in the literature(McDougall and Garrett, 1992; Dukowicz, 1997; Lu, 2001;Greatbatch et al., 2001; Huang and Jin, 2002; McDougall et al.,2002; Greatbatch and McDougall, 2003; Losch et al., 2004; Griffies,2004; Young, 2010; Tailleux, 2009; Tailleux, 2010).
An example of an internal inconsistency of type (ii) can be illus-trated by considering a barotropic compressible fluid layer whosedensity is a function of P alone (i.e., because H, S are spatially uni-form) and in hydrostatic balance,
q ¼ qEOSðPÞ and @zP ¼ �gq: ð2:1Þ
Integration of (2.1) yields mutually consistent vertical profiles for Pand q,
P ¼ Pðf� zÞ;q ¼ Rðf� zÞ � qEOSðPðf� zÞÞ;
�such that
P0ðf� zÞ ¼ gRðf� zÞ;Pð0Þ ¼ Pjz¼f ¼ 0;
(ð2:2Þ
where P and R are universal functions of a single argument, i.e.,their structure depends only one the properties of qEOS(P) in (2.1)but not directly on the local dynamical conditions, such as pertur-bation of the free-surface f. P0 denotes derivative of P with respectto its argument (note that the sign is correct as stated above: both pand q increase with increase of f � z, meaning increase downward).The condition Pð0Þ ¼ 0 is the free-surface pressure boundary condi-tion (for simplicity the atmospheric pressure is presumed to be con-stant and subtracted out).
A gradient of f induces a pressure gradient,
�rxP ¼ �P0ðf� zÞ � rxf; ð2:3Þ
and creates acceleration
� 1qrxP ¼ �P
0ðf� zÞRðf� zÞ � rxf � �grxf; ð2:4Þ
independently of vertical coordinate z regardless of the specificfunctional form qEOS(P) in (2.1) and of the magnitude of the densityvariation within the column. Eq. (2.4) is derived without the use ofBoussinesq approximation. Its Boussinesq analog is
� 1q0rxP ¼ �g
Rðf� zÞq0
� rxf: ð2:5Þ
The presence of the multiplier R=q0, which increases with depth, isclearly an artifact of the Boussinesq approximation. It results in anunphysical vertical shear in the acceleration, hence a spuriousdownward intensification of a geostrophically-balanced barocliniccurrent generated by a rxf. Both these spurious effects are causedby the standard algorithmic chain in a Boussinesq model,
H; S! q ¼ qEOSðH; S; P ¼ q0gðf� zÞÞ ! � 1q0rxP: ð2:6Þ
To estimate the significance of this error, consider for simplicity alinear analog of (2.1),
qEOSðPÞ ¼ q1 þ P=c2; ð2:7Þ

1 We have changed the original notation of Dukowicz (2001) by replacing his q⁄,P⁄? q�, P� to avoid notational conflict with vertically averaged densities �q and q⁄ thatappear in (3.19). For the same reason we also changed notation relatively to SM2005,so q⁄ appearing in this article has the same meaning as q⁄ in SM2005.
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 43
where q1 is the density at P = 0 and c is speed of sound. Then thecounterpart of (2.2) becomes
Pðf� zÞ ¼ q1c2½egðf�zÞ=c2 � 1� � q1gðf� zÞ þ q1g2
2c2 ðf� zÞ2 þ � � � ;
Rðf� zÞ ¼ q1egðf�zÞ=c2 � q1 þq1gc2 ðf� zÞ þ q1g2
2c4 ðf� zÞ2 þ � � � ;
ð2:8Þhence
Rq0� 1þ q1 � q0
q0þ q1
q0� gc2 ðf� zÞ þ � � � ð2:9Þ
Here � = g(f � z)/c2 plays the role of a small parameter justifying thereplacement of q with q0. Assuming c � 1500 m/s and a total depthof 5500 m, we estimate � � 0.025, which is a typical level for Bous-sinesq-approximation errors. This also indicates a strong domi-nance of the leading-order linear term in Taylor-series expansionsover the remaining terms. A comparison of (2.5) with (2.4) suggeststhat the best choice of Boussinesq reference density isq0 ¼ �q ¼ 1
D
R f�hRðf� zÞdz, D = h + f to have the vertical integral of
(2.5) match its non-Boussinesq counterpart (2.4). In the case ofEOS (2.7) this leads to
�q ¼ q1 �c2
gDegD=c2 � 1� �
� q1 1þ 12� gD
c2 þ � � �� �
; ð2:10Þ
which makes (2.9) into ðR=q0Þ ¼ 1þ gðf� z� D=2Þ=c2, effectivelyminimizing its deviation from unity. However, this cannot be doneuniversally, since �q changes horizontally mainly due to topography,nor does it eliminate the spurious vertical shear.
The presence of shear in (2.5) depends on whether or not theEOS pressure is computed as in situ pressure, which takes placein (2.2), or is approximated by its bulk hydrostatic value propor-tional to depth, and furthermore, whether the depth is calculatedfrom the dynamic or rest-state free surface, Pbulk = q0g(f � z) or�q0gz,
qEOS ¼ q1 þ q0gðf� zÞ=c2;
� 1q0rxP ¼ �g q1
q0þ gðf�zÞ
c2
� �rxf;
8<: vs:qEOS ¼ q1 � q0gz=c2;
� 1q0rxP ¼ �g q1
q0� gf
c2
� �rxf:
8<:½vertical shear is present� ½no shear�
ð2:11Þ
This sensitivity was noted by Dewar et al. (1998) (their Case A), whoestimate that the magnitude of the difference in near-bottom geo-strophic currents may reach 5 cm/s for Gulf Stream conditions,resulting in an overall difference of about 3 out of 50 Sv for verti-cally integrated transport. They recommend using full dynamicin situ pressure in EOS, which requires simultaneous vertical inte-gration to compute PEOS and q. Paradoxically, they do so using Bous-sinesq approximation, interpreting the difference as the recoveredphysical effect, rather than a spurious one to be eliminated. Com-parison of (2.2)–(2.4) with (2.11) suggests that using the rest-state(f = 0) bulk pressure in EOS is more suitable for a Boussinesq model,while a non-Boussinesq model is better using in situ pressure. (Onecan also verify that the opposite combination – bulk rest-state EOSpressure in a non-Boussinesq model – yields a reversal of the spu-rious shear: it tends to make otherwise barotropic flows decreasewith depth.) Another aspect pointed out by Dewar et al. (1998) isthat in most oceanic situations the baroclinicity naturally tends tocancel the free-surface PGF resulting in weak flows in the abyss.Therefore, it is advantageous to retain baroclinic effects in EOS pres-sure rather than use PEOS = q0g(f � z), (e.g., left side of (2.11)) thatdoes not provide such compensation. Using q0g(f � z) is a commonpractice in terrain-following-coordinate free-surface models, POMand ROMS, motivated primarily by the convenience: these modelsdo not store the unperturbed geopotential coordinate in a run-timearray.
For the situation where the fluid is stratified (i.e., (2.1) is nolonger true) but the structure of temperature and salinity fieldsare such that the resultant isosurfaces of in situ density are parallelto the free surface, one can verify that (2.4) still holds and theacceleration generated by a perturbation in f does not depend onthe vertical coordinate as long as the Boussinesq approximationis not used. Once again, the Boussinesq approximation destroysthe true vertical uniformity. The baroclinic PGF – i.e., associatedwith a physically correct vertical shear – appears only when den-sity isosurfaces become non-parallel to the free surface.
Dukowicz (2001) made a proposal to reduce Boussinesq errorsby realizing that the largest q variation is caused by the changesin P rather than in H and S. EOS (1.1) may be rewritten as1
q ¼ rðPÞ � q�EOSðH; S; PÞ; ð2:12Þ
where the multiplier r(P) is chosen as a universal function that doesnot depend on local H and S. q�EOSðH; S; PÞ is known as thermobaricor ‘‘stiffened’’ density. It only weakly depends on P, thus has muchsmaller variation than the original in situ density. Using (2.12) onecan renormalize pressure,
dP�
dP¼ 1
rðPÞ ; P�jP¼0 ¼ 0; ð2:13Þ
hence the hydrostatic balance and PGF become
@P�
@z¼ �q�g and � 1
qrxP ¼ � 1
q�rxP�: ð2:14Þ
These retain the same functional form as in the original non-Bous-sinesq equations. Because r(P) is a monotone function, (2.13) isinvertible, P = P(P�), making it possible to rewrite EOS as
q� ¼ qEOS H; S; PðP�Þð Þ=rðPðP�ÞÞ ¼ q�EOS H; S; P�ð Þ: ð2:15Þ
The entire set of equations is then expressed in terms of dotted vari-ables, q� and P�.
A Boussinesq-like approximation is subsequently applied to therenormalized system (2.13)–(2.15) by replacing q� ! q�0 whereverthe replacement q ? q0 occurs in the standard Boussinesq approx-imation (e.g., �ð1=q�ÞrxP� ! �ð1=q�0ÞrxP�). In addition, one canreplace EOS pressure P� in (2.15) with its bulk value, �q�0gz. q�EOS
is much less sensitive to this replacement than qEOS in (1.1),whether the integration of EOS pressure starts from a perturbedor unperturbed free surface (cf., (2.11)) since @q�EOS=@P�jH;S �@qEOS=@PjH;S and P� tends to be closer to a linear function of depththan P. The multiplier r(P) does not appear in the momentum equa-tions written in advective form, but it does appears in the non-Boussinesq continuity equation along with q�. This leads to thetwo options, either.
(i) to replace r(P) ? 1 along with q� ! q�0 resulting in a vol-ume-conserving system of Boussinesq-type. In this caseEOS stiffening can be viewed just as a measure to removeinternal contradiction of using a compressible EOS in amodel that already makes the incompressibility assumption;or
(ii) keep r(P), while simplifying it by rðPÞ ! r PðP� ¼ �q�0gzÞ� �
¼rðzÞ, but still replacing q� ! q�0 in continuity and, in fact,everywhere as it would be in the Boussinesq case.
The latter leads to a model intermediate in its physical approx-imations between Boussinesq and non-Boussinesq, while main-taining the simplicity of a Boussinesq code. One should note that

2 Throughout this study we use s to denote an arbitrary, non-separable, surface-and terrain-following coordinate z=z(x, y,s). In contrast, r is strictly reserved for theproportional (non-stretched) sigma-coordinate, r = (z � f)/(h + f). However, in any
44 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
most oceanic models are discretized using a finite-volume ap-proach with a stretched vertical grid, so they already have an arrayto compute and store control-volume heights. A non-Boussinesqmodel uses density weighting over control volumes, resulting inan additional feedback loop arising from the dependency of densityon model dynamics by EOS pressure which adds extra complexity.On the other hand, retaining r(P) approximated as r(z) only slightlymodifies the procedure of calculating control volumes, while pre-serving the overall logical flow of a Boussinesq code. This meansthat the model is still volume-conserving, but now control volumesare rescaled to include r(z)-weighting that can be viewed just as ageometrical property of the grid since it does not depend on modeldynamics. In effect, this option approximates in situ density asq�0 � rðzÞ instead of the constant q0 in the standard Boussinesqapproximation.
To illustrate the effect of modifying the Boussinesq approxima-tion in this way, we reconsider (2.7)–(2.11). In this case it is naturalto chose q�0 ¼ q1 and r(P) = 1 + P/(q1c2). Then the stiffened EOS(2.15) becomes q� ¼ q�EOSðP
�Þ ¼ q1, which is just a constant value,i.e., q�EOS becomes infinitely ‘‘stiff’’ and therefore insensitive tohow EOS pressure is computed (the opposite of (2.11)). The renor-malized pressure is P� = gq1(f � z), resulting in �ð1=q�0ÞrxP� ¼�gðq1=q�0Þrxf ¼ �grxf, which coincides with the non-Boussinesqversion (2.4) and does not contain any spurious vertical shear. Notethat PðP�Þ ¼ q1c2ðeP�=ðq1c2Þ � 1Þ and rðP�Þ ¼ eP�=ðq1c2Þ; this translatesinto rðzÞ ¼ egðf�zÞ=c2 .
The preceding example is rather trivial because H, S fields areuniform which makes it possible to express the entire density var-iation in terms of r(P), so the subsequent replacement q� ! q�0leads to an equivalence of the modified Boussinesq and non-Bous-sinesq models. In the general case H, S are not uniform, and theapproximation is not exact. However, (2.12)–(2.15) is still a veryeffective measure to reduce Boussinesq-approximation errors (by90%) because for realistic conditions the variations of speed ofsound c are relatively small (i.e., c = 1480� � �1540 m/s) and a largeportion of that variation is due to changes in pressure alone, whichcan be excluded from contributing to the errors. EOS in (2.1) isnonlinear with respect to P; however, (2.4) still holds and r(P)can absorb the entire density variation in this case as well. Theeffectiveness of using (2.12) is facilitated by the fact that variationsof H, S tend to decrease significantly with depth, where EOS non-linearities due to P are strongest.
Finally, we should note that McDougall et al. (2002) proposedan alternative version of Boussinesq approximation, where theyinterpret Boussinesq velocity not in its original meaning, but asre-normalized mass flux per unit area, ~u ¼ qu=q0. Their systemdoes not produce non-physical shear in geostrophically-balancedflow in the Boussinesq case (2.6), because now it is ~u, not u be-comes proportional to vertical density profile, which means thatthe unscaled velocity in vertically uniform, hence is correct. Theyconcluded that the new Boussinesq makes EOS stiffening of Duko-wicz (2001) unnecessary, because it can be avoided by their ap-proach. Unfortunately their system has an undesirable side effectof altering scaling relationship between advection and Coriolisterm which makes it impossible to derive a potential vorticityequation for a shallow layer of barotropic compressible fluid, seeAppendix A. This puts their system into disadvantage relativelyto Boussinesq equations with stiffened EOS, and negates their crit-icism of Dukowicz (2001).
case the displacements of coordinate surfaces caused by free-surface movement areproportional to the distance from the bottom, otzjs=const = otf�(z + h)/(h + f).
3 In a more standard definition a and b are normalized by density, hence a = �(1/q)oq/oHjS,P=const and b = (1/q)oq/oSjH,P=const, where q is either in situ (non-Boussinesqversion), or q = q0 is Boussinesq reference density (if Boussinesq approximation isused). Since for the purpose of the present study it is important to keep track of theq ? q0 replacement on every occasion, we chose to exclude (1/q) from the definitionof a and b.
3. Pressure effects in EOS
In this section we examine the specific requirements on EOS forthe purposes listed in Section 1 to find a functional form compat-ible with the PGF calculation in sigma-coordinates, Shchepetkin
and McWilliams (2003,); re-evaluate the accuracy of the mode-splitting algorithm of SM2005 focusing on compressibility effects;and inspect the EOS needs for subgrid-scale mixingparameterizations.
3.1. Pressure-gradient force in sigma-coordinates
Following SM2003, the baroclinic PGF in r coordinates can beexpressed entirely in terms of adiabatic derivatives of in situ den-sity: a density-Jacobian scheme is written as
J x;sðq; zÞ ¼ �a � J x;sðH; zÞ þ b � J x;sðS; zÞ; ð3:1Þ
which is then integrated vertically to compute PGF. J x;s denotes theJacobian of its two arguments,
J x;sðq; zÞ ¼@q@x
s
� @z@s� @q@s� @z@x
s
;
where s ¼ sðx; zÞ% 0; z! f
& �1; z! �h;
@s@z
> 0; s is a generalized sigma-coordinate;2 and
ð3:2Þ
a ¼ aðH; S; PÞ ¼ �@q=@HjS;P¼const;
b ¼ bðH; S; PÞ ¼ @q=@SjH;P¼const ð3:3Þ
are thermal expansion and saline contraction coefficients.3 Geopo-tential height z in (3.1) is used as a proxy for EOS pressure – replac-ing it with �gq0z, hence neglecting the non-uniformity of densityand the contribution due to f – 0. This is a common approximationin Boussinesq codes. Eq. (3.1) has as its only EOS requirement on thecomputation of a and b. Because a and b depend on pressure (depth),the weighting of J x;sðH; zÞ and J x;sðS; zÞ in the r.h.s. changes withdepth as well, so that the same pair of gradients of H and S yieldsdiffering contributions in PGF with depth (a thermobaric effect).
Eq. (3.1) involves two separate Jacobians for H and S. Comput-ing them separately and combining them at the last stage is unde-sirable because applying discretized monotonicity constraints to Hand S separately does not guarantee positive stratification of inter-polated density, even if the density values corresponding discreteH and S are positively stratified. This can lead to large errors andpossible numerical instability if the density field is not smoothon the grid scale. Instead, for reasons explained below, the pre-ferred form of EOS is
q ¼ qð0Þ1 þ q01ðH; SÞ þXn
m¼1
qð0Þm þ q0mðH; SÞ� �
� ð�zÞm; ð3:4Þ
where q1 ¼ qð0Þ1 þ q01ðH; SÞ is density with a given potential temper-ature and salinity at surface pressure; the compressibility coeffi-cients qm ¼ qð0Þm þ q0mðH; SÞ do not depend on z; qð0Þ1 ; qð0Þ1 ; . . . ; qð0Þn areconstant bulk values chosen in such a way that qð0Þ1 q01,qð0Þ1 q01; the absolute depth (�z) serves the role of EOS pressure(when it appears inside EOS it increases downward, counting fromeither the rest-state free surface z = 0, or the actual free surfacez = f). Then J x;sðq; zÞ can be computed as

4 This situation is partially addressed by removing the dynamically passive bulk-compressibility terms from EOS in SM2003, but the main motivation was to reducethe PGF error, rather than to improve mode splitting.
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 45
J x;sðq; zÞ ¼ J x;s q01; z� �
þXn
m¼1
ð�zÞm � J x;sðq0m; zÞ; ð3:5Þ
where (�z)m are treated as coefficients not subject to differentia-tion. For this reason this can also be viewed as a form of adiabaticdifferentiation. The contribution of terms with qð0Þ1 ; qð0Þ1 ; qð0Þ2 ; . . ., can-cels out identically here; i.e., they are dynamically passive. To en-sure that the stratification corresponding to the interpolateddensity field stays non-negative (non-oscillatory), the algorithm ofSM2003 relies on a measure of the smoothness of density fieldbased on the ratio of consecutive adiabatic differences. The schemeis based on cubic polynomial fits and requires evaluation of densityderivatives at the same discrete locations as density itself, qi,j,k,which in its turn needs some kind of averaging of elementary differ-ences over the two adjacent grid intervals. If the two elementarydifferences are of the same sign, but differ by more than a factorof three, a simple algebraic averaging overestimates the derivativeat the location of qi,j,k and causes spurious oscillation of the cubicpolynomial interpolant. If EOS has no dependency of pressure, aconventional monotonization algorithm for the interpolation ofdensity would suffice, but for a realistic EOS the comparison of ele-mentary differences is meaningful only if they are defined in an adi-abatic sense,
Dq0ðadÞiþ1=2;j;k ¼ q01 iþ1;j;k � q01 i;j;k
þXn
m¼1
q0miþ1;j;k � q0mi;j;k
� �� ziþ1;j;k þ zi;j;k
2
�m
: ð3:6Þ
The two adjacent adiabatic differences are averaged using harmonicmean, and (if needed) the compressible part is computed and addedseparately,
di;j;k �@q@n
i;j;k
¼ 1Dn�2Dq0ðadÞ
iþ1=2;j;k � Dq0ðadÞi�1=2;j;k
Dq0ðadÞiþ1=2;j;k þ Dq0ðadÞ
i�1=2;j;k
þ q01 i;j;k þ 2q02 i;j;k � ð�zi;j;kÞ þ � � �� �
� @z@n
i;j;k
" #; ð3:7Þ
which is applicable if Dq0ðadÞiþ1=2;j;k and Dq0ðadÞ
i�1=2;j;k have the same sign;otherwise the first term in the r.h.s. is replaced with zero. Becausethe harmonic averaging never exceeds twice the smaller of thetwo operands, it acts as monotonization algorithm for interpolation.The algorithm (3.6), (3.7) requires that q01, q01, q02, . . . be availableseparate from the EOS calculation. This is practical only if (3.4) is re-stricted to a very few coefficients q0m. In Section 4 we will present asufficiently accurate approximation to EOS with the functional formof (3.4) that contains only two coefficients, q01 ¼ q01ðH; SÞ and q02,with the latter being just a constant multiplied by q01.
From the above one might get an impression that the passive-ness of the bulk terms qð0Þ1 ; qð0Þ1 ; qð0Þ2 ; . . . in (3.4) is just a consequenceof neglecting the contribution disturbance of f in EOS pressure.This is not correct. Including f in EOS pressure would cause a Bous-sinesq error of the type (ii) in (2.5)–(2.11). Consider an EOS withthe form,
q ¼ qð0Þ1 þXn
m¼1
qð0Þm � ðf� zÞm þ � � � ð3:8Þ
where � � � denotes the primed terms in (3.4) that depend on H and S.The contribution of the bulk terms
J x;sðq; zÞ ¼Xn
m¼1
qð0Þm �m � ðf� zÞm�1 � @z@s� @f@x; ð3:9Þ
leads to
@P@x
z
¼ gqjz¼f
@f@xþ g
Z 0
sJ x;sðq; zÞds0
¼ gqð0Þ1@f@xþXn
m¼1
qð0Þm � ðf� zÞm � @f@x¼ gq
@f@x: ð3:10Þ
In a Boussinesq model the last term in the r.h.s. is divided by q0,which leads to a spurious vertical shear in a purely barotropic flow(cf., (2.5) in Section 2). From this point of view, it is desirable to ex-clude qð0Þ1 ; qð0Þ2 ; . . . from (3.4):
q ¼ q0 þ q0 where q0 ¼ q01ðH; SÞ þXn
m¼1
q0mðH; SÞ � ð�zÞm; ð3:11Þ
after which using (�z) or f � z no longer makes a noticeable differ-ence SM2003. EOS stiffening of Dukowicz (2001) can be imple-mented in this context by choosing
rðzÞ ¼ 1þ 1=qð0Þ1
� �Xn
m¼1
qð0Þm � ð�zÞm ð3:12Þ
and applying it to (3.4). This leads to cancellation of terms contain-ing qð0Þ1 ; qð0Þ2 ; . . ., etc., and, after expansion in powers of (�z), theresultant q�0 can be expressed in the same functional form as(3.11), but with a modified set of coefficients: the q0mðH; SÞ areslightly reduced to account for 1/r(z) 6 1. Obviously, r(z) commuteswith the Jacobian operator,
J x;sðrðzÞ � q�; zÞ ¼ rðzÞ � J x;sðq�; zÞ; ð3:13Þ
however, the corresponding discrete relationship holds only withinthe order of accuracy, not exactly.
The above choice of r(z) is on par with Sun et al. (1999), Hallberg(2005), but differs from Dukowicz (2001), who derives it fromglobally-averaged H,S-profiles from observations to makeq�0 � rðzÞ as close as possible to in situ density: this is incompatiblewith the algorithm (3.6) and (3.7) for avoiding spurious oscillationsin stratification, which leads to the alternative fit in Section 4.
In summary we identify the following requirements on EOS foraccurate computation of PGF in a sigma-model: accurate depen-dency of a and b on H, S, and pressure (depth); non-appearanceof in situ density and suppression of the bulk terms qð0Þ1 ; qð0Þ1 , . . .,etc. in PGF; and an EOS form that facilitates computation of adia-batic differences in all directions.
3.2. Barotropic–baroclinic mode-splitting
The barotropic–baroclinic mode-splitting algorithm of SM2005makes the Boussinesq approximation without analyzing its conse-quences for mode-splitting. It assumes that the fluid is incom-pressible and that all q variations occur due to baroclinicity,which is not the realistic case where most of the q change is causedby P rather than (H,S) variation.4 In this section we provide a de-tailed analysis of how mode splitting is affected by the compressibil-ity effects.
The purpose of mode-splitting is to take advantage of the differ-ence of time scales between external gravity-wave propagationand other, slower processes. Its key element is expressing the ver-tically-integrated PGF,
F ¼ � 1q0
Z f
�hr?P dz ¼ F½r?f; f;r?qðx; zÞ;qðx; zÞ�; ð3:14Þ
in two parts: one that can be efficiently computed from only thebarotropic variables (e.g., f) and another that is independent (or

46 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
as weakly dependent as possible) on f. With F the vertically inte-grated momentum equation is rewritten as
@tðD�uÞ þ � � � ¼ dF|{z}@ðdFÞ=@f – 0
þ ½F � dF�|fflfflfflfflfflffl{zfflfflfflfflfflffl}@=@f�0
: ð3:15Þ
The first r.h.s. term, dF , is identified as the barotropic PGF. In split-explicit time-stepping it is treated as ‘‘fast’’ and recomputed at eachbarotropic time step. Conversely, the second is ‘‘slow’’ and accord-ingly kept constant during the barotropic stepping and only up-dated during the baroclinic step. F must be computed at everybaroclinic step before the barotropic stepping begins. When com-puting F by (3.14), there is no other choice than to use the latestavailable f, which at this moment is at the previous time step. Con-sequently, the residual dependency of F � dF on f results in a r.h.s.term of a hyperbolic nature treated by using an effectively forward-Euler baroclinic time-stepping. This may lead to a numerical insta-bility, imposing an additional non-physical restriction on the baro-clinic time-step size or may require extra damping. The difficultycomes from the fact that (3.14) is generally a nonlinear functional,involving products of density and, in principle, dependence of q on fthrough EOS compressibility. To address these issues, dF is derivedas a variational derivative of F (SM2005, also Shchepetkin andMcWilliams, 2008)
dF ¼ @F@ r?fð Þ d r?fð Þ þ @F
@fdf; ð3:16Þ
where f and r\f are viewed as independent state variables.5 Theuse of (3.16) ensures that when two different time-stepping algo-rithms are applied separately to the barotropic and baroclinic com-ponents, the resultant sum of the updated barotropic PGF (i.e.,computed from the new f) and the original 3D ? 2D forcing termF � dF½ � is sufficiently close to the vertically-integrated PGF com-
puted from the new f,
dF0 þ ½F � dF� ¼ F þ @F@ðr?fÞ
r?ðf0 � fÞ þ @F@fðf0 � fÞ
¼ F0 þ Oððf0 � fÞ2Þ; ð3:17Þ
where F ¼ F½f;r?f;r?q;q� and F0 ¼ F½f0;r?f0;r?q;q� corre-spond to the old f and the updated f0 each with same density field.The Oððf0 � fÞ2Þ estimate of the mismatch between F0 and the l.h.s.comes from the fact that (3.17) is essentially a Taylor-series expan-sion of F0 in powers of f0 � f. Assuming that q does not depend on fand remains frozen during barotropic time-stepping,6 (3.16) yields
dF ¼ � gq0
hr? q�fð Þ þ r?q�f
2
2
!þ ðq� � �qÞfr?h
" #; ð3:18Þ
where
�qðxÞ ¼ 1D
Z f
�hqðx; zÞdz
q�ðxÞ ¼1
D2=2
Z f
�h
Z f
zqðx; z0Þdz0
� dz
8>>><>>>: ð3:19Þ
are two-dimensional horizontal (with x = (x,y)) fields kept constantduring barotropic time-stepping. This implies that the splittingalgorithm relies on the independence of �q and q⁄ from f, which inturn relies on the assumption of independence of EOS from f.
A property of (3.18) is that if density is uniform, q� ¼ �q ¼ q0, dFreverts back to �gDr\f that is used by most of the oceanic models
5 A finite-difference version of (3.14) is a function of two adjacent grid-pointvalues, fi,j and fi+1,j. Their average and difference are analogous to f and r\f.
6 More precisely, the density field is ‘‘frozen in r-space’’ during barotropic time-stepping. This is because the entire vertical coordinate system ‘‘breathes’’ when fmoves up and down, so each vertical grid box also changes proportional to its height,while the grid-box averaged values of density remain unchanged.
as an approximation for barotropic PGF (Berntsen et al., 1981;Blumberg and Mellor, 1987; Killworth et al., 1991). These areBoussinesq-approximation models that assume the smallness ofq(x,z) � q0, and their mode-splitting procedures rely on this small-ness as well. Isopycnic models tend to be non-Boussinesq and use adifferent mode-split, essentially linking dF to the bottom pressureof the resting state (f = 0) (Bleck and Smith, 1990). Since the bot-tom pressure is computed by vertical hydrostatic integration, thistranslates into dF ¼ �gDr?ð�qfÞ, where �q is the vertically-aver-aged density. (Note that this dF is dimensionally different fromthe similar term in (3.15) because non-Boussinesq models use den-sity-weighting to compute �u.) This split is also empirical andapproximate. Higdon and de Szoeke (1997) propose a more accu-rate split for a non-Boussinesq isopycnic model, which replaces �qwith a different value computed from the local vertical profile ofdensity (somewhat similar to q⁄, but expressed in terms of specificvolume rather than density). In all cases, with or without the Bous-sinesq approximation, the fluid was considered as incompressiblefor the purpose of mode-splitting.7
The goal of replacing �gDr\f with (3.18), (3.19) is to achievemutual consistency between the 3D and 2D parts of the model–mainly in the ability of the split 2D part to yield the same barotrop-ic gravity-wave phase speed ~c as the full 3D model. This consis-tency may or may not provide an improvement in the overallphysical accuracy. The sources of mode-splitting error from using�gDr\f as the barotropic PGF are the following:
(i) ‘‘Horizontal baroclinicity’’: Suppose the fluid is incompress-ible and there is no vertical stratification, but the densityvaries horizontally, hence q� ¼ �q ¼ �qðxÞ. Because of theBoussinesq approximation, F and ~c are seen by the 3D partof the model as proportional to �q=q0 and
ffiffiffiffiffiffiffiffiffiffiffi�q=q0
p, respec-
tively. The spatial variation of �q makes it impossible tochoose q0 in such a way that the use of the �gDr\f-termfor the barotropic mode accurately approximates F , espe-cially in a very large basin, thus contributing to mode-split-ting error using � gDr\f. The small parameter associatedwith this type of error is ð�q� q0Þ=q0.
(ii) Vertical stratification: ~c is smaller in a stratified compressiblefluid than in a stratified incompressible fluid with the samedepth,
7 IntheoretconservreferencMcDouga local
~c2 ¼ gh� c21; ð3:20Þ
where c1 is the gravity-wave phase speed of the first baro-clinic mode (Appendices C and D). The relevant small param-eter for estimating this mode-splitting error is the ratio of thesquares of the modal phase speeds, ~c2
1=ðghÞ.
(iii) Seawater compressibility: In the case of constant bottomtopography ~c is reduced relative to an incompressible fluidwith the same depth by
~c2 ¼ gh 1� 12� gh
c2 þ � � �� �
ð3:21Þ
(Appendices A and B for non-stratified and stratified cases).The mechanism of this reduction is non-Boussinesq and isassociated with the fact that the volumetric divergence ofhorizontal barotropic velocity causes a smaller response inf than in an incompressible fluid. The use of (3.18), (3.19)qualitatively captures the influence of compressibility–by
isopycnic coordinates this approximation is also needed to circumvent aical difficulty with the assumption that potential density is a Lagrangianed property, which implies that it can be defined globally relative to a givene pressure. In fact, the seawater EOS does not have this property (Jackett andall, 1997), allowing only a local definition of potential density with respect to
reference pressure.

8 In psteppin1.4 tim
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 47
distinguishing q⁄ and �q with q� < �q in this case–but the anal-yses below indicate an underestimation of the effect, andtherefore a contribution to mode-splitting error with an asso-ciated small parameter of gh/c2. Since both corrections to thebarotropic phase speed ~c, (3.20) and (3.21), are small, theyare approximately additive (Appendix C).
(iv) Sea-level contribution to EOS pressure: In principle, PGF is sen-sitive to how EOS pressure depends on f (cf., (2.11)), henceF , depends on f through compressibility in EOS in additionto the explicit dependence from r\f. In the case of constanttopography the impact on barotropic phase speed ~c due tothis effect is small relative to that of (iii)–Oðgf=c2Þ vs.Oðgh=c2Þ –in fact, it formally vanishes when linearizing withrespect to small f/h� 1 (Appendices A and B). However,since f used in EOS pressure is always taken from the previ-ous baroclinic time step and is kept constant during thebarotropic time stepping, this leads to the appearance ofhyperbolic r.h.s. terms that receive effectively a forward-in-time treatment. This potentially makes it a source ofmode-splitting error and even instability. It should also benoted that the effect can be amplified in the presence ofsteep topography where the last term in (3.18),ðq� � �qÞfr?h, dominates over hr\(q⁄f), even though theinfluence of f into q⁄ and �q via EOS partially cancels due tosubtracting one from the other.
The mode-splitting procedure of SM2005 is designed to addressitems (i) and (ii) within the Boussinesq approximation, while (iii)and (vi) are given much less consideration.
Notice that replacing �gDr\f with (3.18), (3.19) motivated byitem (i) is an artifact of the Boussinesq approximation. From (2.4)the non-Boussinesq local barotropic phase speed
ffiffiffiffiffiffigh
pdoes not de-
pend on local vertically-averaged density �q. (The inertial terms inthe non-Boussinesq momentum equation use local density ratherthan q0, resulting in cancellation of density when computing accel-eration and phase speed; Appendix B.) Paradoxically, using�gDr\f, rather than (3.18), (3.19) may look more suitable in thiscase because it yields the correct ~c. Conversely, the use of (3.18),(3.19) can be viewed as an introduction of an a priori physical dis-tortion into the barotropic mode to match an existing distortion inthe 3D F to minimize mode-splitting error, which is the higher pri-ority. EOS stiffening provides some relief in this conflict by merelytransforming ð�q� q0Þ=q0 ! ð�q� � q�0Þ=q�0, which is expected to besomewhat smaller; however, practical experience with ROMSSM2005 indicates that the largest deviations of local vertically-averaged density are due to local H,S anomalies in shallow mar-ginal seas, often semi-enclosed by topography. Under such condi-tions the bulk compressibility effect is not very strong, sostiffening does not make a large difference. Closely related to item(i) is the sensitivity of the numerical stability of the code to thechoice of q0, and (3.18), (3.19) eliminates this problem.
The reduction of ~c due to stratification, item (ii), occurs in bothnon-Boussinesq and Boussinesq cases, and (3.18), (3.19) provide anaccurate accounting of it (Appendix D). To estimate its importance,note that the ratio of phase speeds also sets the mode-splitting ra-tio (i.e., the number of barotropic time steps per baroclinic step,typically in the range 30–70 and closer to the upper limit for anopen-ocean configuration).8 This implies an estimated erroneousreduction of ~c by 10�3 of its value from (3.20). Although this mightseem to too small to be a concern, recall that the phase error due tothe slightly different ~c values from using �gDr\f is accumulatedover many barotropic time steps performed at each baroclinic step,
ractice the splitting ratio is adjusted by the ratio of stability limits of the time-g algorithms for the 2D and 3D parts. For ROMS the splitting ratio is typicallyes larger than the ratio of phase speeds.
which makes the numerical stability of the code sensitive to whether(3.18), (3.19) is used or not.
The physical explanation of item (iii) is non-Boussinesq innature: despite the coincidence of (2.4) with the PGF due to thegradient of f in a barotropic incompressible flow, the value of ~c issmaller in a compressible fluid (cf., (B.6) in Appendix B), where aconvergence of horizontal velocity causes a change of both f anddensity with relative proportions of 1 � gh/c2 and gh/c2,respectively.
Eq. (3.18), (3.19) are derived using the Boussinesq approxima-tion, but nevertheless they also predict a smaller phase speed thanwith �gDr\f. When the density increases with depth, q� < �q, sothe PGF caused by a given r\f is slightly smaller than in the caseof vertically-uniform density with the same water-column mass(n.b., this implies that the choice of q0 ¼ �q). Substitution of (2.8)into (3.19) yields
�q ¼ q1 �c2
gDðegD=c2 � 1Þ � q1 1þ 1
2� gD
c2 þ � � �� �
q� ¼ q1 �c2
gDc2
gDðegD=c2 � 1Þ � 1
� � q1 1þ 1
3� gD
c2 þ � � �� �
:
ð3:22Þ
With a flat bottom this implies ~c ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffigh � q�=q0
pinstead of just
ffiffiffiffiffiffigh
p.
While this qualitatively captures the effect of reducing ~c relative tothat of an incompressible fluid, even if we make the best possiblechoice for reference density (q0 ¼ �q), the correction is underesti-mated by a factor of 1.5 relative to its true, non-Boussinesq magni-tude in (B.9) in Appendix B. This discrepancy is not surprising sincethe non-Boussinesq explanation for the reduced phase speed is dif-ferent than in (3.18).
Eq. (3.21) provides an estimate for the barotropic speed reduc-tion due to effect (iii) of 0.6% of
ffiffiffiffiffiffigh
passuming h = 5500m and
c = 1500 m/s. This is one-and-half orders of magnitude larger thanthe effect of baroclinicity (ii), and therefore it creates a strongerrequirement for replacing �gr\f with (3.18), (3.19) even thoughtcorrecting for item (iii) was not the initial motivation. EOS stiffen-ing dramatically reduces the difference between �q and q⁄. Thiseliminates the non-physical mechanism of reduced barotropicphase speed due to compressibility via (3.22). It also brings themode-splitting procedure into the realm of assumptions for its ori-ginal derivation.
The effect of (iv) is expected to be much smaller than (iii); how-ever, Robertson et al. (2001) observed a numerical instability inPOM while simulating tides under near-resonant conditions. Thesource of the instability was traced back to the influence of f onEOS pressure through the use of old-time-step f due to the specificsof the mode-splitting algorithm. Although they did not classify it as amode-splitting instability, the mechanism of its appearance isessentially the same as in (iv). They proposed to eliminate the insta-bility by dropping pressure effects in EOS altogether: they split EOSadditively as q = qN(H,S) + qp(P) (starting with their Eq. (16)), andshowed the dynamic passiveness of qp, which they subsequently ex-cluded. This leads to complete loss of the thermobaric effect, andthat may be not acceptable in many large-scale applications. EOSstiffening of Dukowicz (2001) helps to reduce (but not to eliminateentirely) the splitting error while keeping thermobaricity intact.
3.3. Vertical mixing parameterization
The vertical mixing parameterizations are based on the stratifi-cation stability, expressed as the Brundt–Väisälä FrequencyN(x,z,t), and the translation of surface heat and freshwater fluxesinto a buoyancy flux. Both steps use the a(H,S,P) and b(H,S,P) coef-ficients from EOS,
N2 ¼ g½a � @zH� b � @Sz�: ð3:23Þ

48 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
Thus, the requirement for EOS is to accurately reproduce a and b,but now with a shifted emphasis on accurate computation of theirratio, a/b. The primary sensitivity here comes from detecting whenstratification and/or buoyancy forcing change sign, because this cor-responds to a drastic transition from one stable to convective mix-ing regime. The Boussinesq—non-Boussinesq and EOS stiffeningissues are not a concern here because both a and b are normalizedby the same density–whether in situ or replaced by q0 or q�0,
a ¼ � 1q@q@H
S;P
! � 1q�0
@q�
@H
S;P
; b ¼ 1q@q@S
H;P
! 1q�0
@q�
@S
H;P
; ð3:24Þ
hence their ratio is not affected. Because negative stratification isintolerable in a hydrostatic model and parameterized vertical mixingis the only mechanism that prevents it (by entrainment of water fromadjacent positively stratified layers above or below), it is desirablethat the procedure for detecting negative stratification in the mixingscheme be consistent with the monotonized adiabatic differencing inthe PGF algorithm (3.6), (3.7). In particular, the stratification maychange abruptly near the interior edge of the top and bottom bound-ary layers. Accurate determination of the layer thickness requiresdensity interpolation where it is often non-smooth on the verticalgrid-scale; this leads to similar requirements on EOS as for PGF.
3.4. Neutral surfaces
The definition of potential density depends a reference pres-sure, and for a realistic EOS it cannot be defined globally in thesense of a scalar function of local H,S,P with spatial derivativesequivalent to adiabatic derivatives of in situ density (Jackett andMcDougall, 1995). Instead, one should either construct a neutraldensity (Jackett and McDougall, 1997), which is inherently non-local, or, alternatively, one could use a local procedure relying ona � , and b-weighting of temperature and salinity gradients (seeEqs. (31), (32) in Section 5 in Griffies et al. (1998)). EOS in the form(3.4) and the associated adiabatic differencing (3.6) allow directcomputation of the local slopes of neutral surfaces.
4. A practical ‘‘stiffened’’ EOS
The seawater EOS of Jackett and McDougall (1995) has the form,
qðH; S; zÞ ¼ q1ðH; SÞ1� 0:1 � z K00 þ K0ðH; SÞ þ K1ðH; SÞ � zþ K2ðH; SÞ � z2½ �=
;
ð4:1Þ
where H is potential temperature; S salinity; q1(H,S) is the densityat a surface pressure of 1atm, fit by a 15-term polynomial contain-ing various products of powers of Hn, n = 1, . . . ,5, and Sm, m = 1,3/2,2 (not in all permutations). The divisor K = K00 + K0(H,S) + � � �has K00 = const, and the remaining three coefficients K0, K1 K2 de-pend on H and S with similar polynomial fits with powers ofH, . . . ,H4, and S, S3/2 that add up to a 26-term polynomial for K.The UNESCO EOS has the same functional form, but it is expressedin terms of in situ temperature; hence q1 is identically the same, butthe coefficients for K0,K1,K2 are different. In addition, EOS pressure in(4.1) is remapped into depth z.9 The complexity of the functionalform of UNESCO EOS motivates oceanic modelers to derive simplifiedversions for more efficient calculation (Mellor, 1991; Wright, 1997;Brydon et al., 1999; McDougall et al., 2003; Jackett et al., 2006).
Dukowicz (2001) chooses the multiplier r(P) to fit an in situ den-sity profile computed from the globally horizontally averaged tem-perature and salinity profiles based on Levitus WOA94 data [an
9 Throughout this section we adopt the convention that z increases downward, thesame way as hydrostatic pressure. We use notation z to distinguish it from z(increasing upward) as it is used elsewhere in this article.
updated version of which is available today as Locarnini et al.(2006), Antonov et al. (2006)]. Although this approach yields theminimum possible range of variation for q�, and thus has the max-imum effect in reducing the Boussinesq–approximation errors, itinterferes with the ability to monitor stratification smoothnessby (3.6), (3.7) because the spatial differences of q� constructed thisway unavoidably contain a contribution associated with the se-lected mean density profile as long as the direction of differencingis not strictly horizontal (unlike the horizontal differencing in z-coordinate models, for which the method of Dukowicz (2001)was originally intended). As a result, a change in sign for the differ-ences no longer corresponds to the change from positive to nega-tive physical stratification. This also alters the ratios ofconsecutive differences in (3.7) ultimately negating its monoton-ization properties. Therefore we alternatively choose constant ref-erence values, Href and Sref, that are representative of the abyssalpart of the ocean, and then construct a multiplier rðzÞ as
rðzÞ ¼ 1
1� 0:1z=Kref ðzÞ; where KrefðzÞ ¼ K00 þ Kref
0 þ Kref1 zþ Kref
2 z2;
ð4:2Þ
with Kref0 ¼ K0ðHref ; SrefÞ, Kref
1 ¼ K1ðHref ; SrefÞ, and Kref2 ¼ K2ðHref ; SrefÞ.
In the results presented here we choose Href = 3.50C andS = 34.50/00, which imply Kref
0 ¼ 2924:921, Kref1 ¼ 0:34846939,
Kref2 ¼ 0:145612� 10�5, and q1(Href,Sref) = 1027.43879. The stiff-
ened EOS (2.15) with this Boussinesq-approximation rðzÞ becomes
q�0ðH; S; zÞ ¼ ½q�0 þ q01ðH; SÞ� �1� 0:1z=KrefðzÞ
1� 0:1z=KðH; S; zÞ � q�0: ð4:3Þ
q�0 is the perturbation of q� relative to a constant reference value q�0,which is naturally chosen as q�0 ¼ q1ðH
ref ; SrefÞ. After cancellation ofthe large terms, the stiffened EOS is rewritten as
q�0ðH; S; zÞ ¼ q01ðH; SÞ þ 0:1z � q�0 þ q01ðH; SÞK00 þ Kref
0 þ Kref1 zþ Kref
2 z2
�Kref
0 � K0ðH; SÞ þ Kref1 � K1ðH; SÞ
� �� zþ Kref
2 � K2ðH; SÞ� �
� z2
K00 þ K0ðH; SÞ þ K1ðH; SÞ � 0:1ð Þzþ K2ðH; SÞz2
� q1ðH; SÞ þ q0ðH; S; zÞ � z;ð4:4Þ
so far without any approximation. This is already close to the de-sired functional form (3.4); however q0ðH; S; zÞ still explicitly de-pends on z, although weakly as we show below. Eq. (4.4) impliesthat q�0ðHref ; Sref ; zÞ � 0 and q0ðHref ; Sref ; zÞ � 0 for all z. This ensuresthat the range of variation for q�0 is expected to be small in general,and even diminish with depth since variations of H and S alsodiminish.
A Taylor series expansion of (4.4) in powers of z yields
q�0ðH; S; zÞ ¼ q01ðH; SÞ þ q01ðH; SÞ � z; ð4:5Þ
where
q01ðH; SÞ ¼ 0:1 � q0 þ q01ðH; SÞ� �
� Kref0 � K0ðH; SÞ
ðK00 þ K0ðH; SÞÞ � ðK00 þ Kref0 Þ
: ð4:6Þ
This has exactly the functional form of (3.4). It is an approximationto (4.4) where all K1 and K2 terms (14 out of 26 coefficients of K) arediscarded. In practice we use a slightly modified form,
q�0ðH; S; zÞ ¼ q01ðH; SÞ þ q01ðH; SÞ � zð1� czÞ; ð4:7Þ
with c = 1.72 � 10�5 m�1 for the Href and Sref values listed above.This captures some of the nonlinear dependency of the thermobariceffect without significant increase in complexity, and it also reduceserrors relative to (4.5). Consistently with (4.7), the algorithm forcomputing elementary adiabatic differences (3.6) becomes

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 49
Dq�0ðadÞiþ1
2;j;k¼ q01 iþ1;j;k � q01 i;j;k þ q01 iþ1;j;k � q01 i;j;k
� � ziþ1;j;k þ zi;j;k
2
� 1� cziþ1;j;k þ zi;j;k
2
�: ð4:8Þ
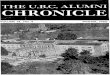
Fig. 1. ‘‘Stiffened’’ density perturbation q�0 defined by (4.7) (left); the corresponding therof potential temperature H and salinity S at five different depths z ¼ 0;200;1000;2500 ahere a = �@q/@HjS,P=const and b = +@q/@SjH,P=const without the usual division by q). Shadingsimilar to Fig. 19 in SM2003.)
Isolines of q�0 from (4.7) are plotted in the left column of Fig. 1 forfive different depths: 0, 200, 1000, 2500, and 5000 m. The shadingin Figs. 1,2 indicates the global distribution of hydrographic datavalues (Levitus WOA data, Antonov et al., 2006; Locarnini et al.,2006). At each depth the data samples are combined into
mal expansion, a (middle), and saline contraction, b (right), coefficients as functionsnd 5000 m. The units are kg/m3, (kg/m3)/�C, and (kg/m3)/(‰) respectively (note thatindicates the distribution of observed (H,S) values (see text). (The overall format is

Fig. 2. Errors in a (left), b (middle), and their ratio, a/b (right) due to the approximate EOS (4.7) compared to the complete EOS (4.4) at four different depths:z ¼ 200;1000;2500, and 5000 m. The shading is the same as in Fig. 1, and the dashed box surrounds the domain of interest. (The format is similar to Fig. 20 in SM2003.)
50 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
DH � DS = 0.250C � 0.250/00 bins to compute the probability distri-bution. This is shown by the three hues of shading: the lightest indi-cates that this pair of H,S values is observed at least once in thedataset, the medium shading contains 99% of the observed data atthat depth, and the darkest contains 90%. There is a significantreduction of variation of the observed H,S with depth as manifestedby the shrinking of the shaded area, which was utilized by McDou-gall et al. (2003) and SM2003 to simplify treatment compressibilityeffects in EOS (note that only a very little seasonal variation of H, Sremains at the depths of z ¼ 200 m, which is illustrated by a rathernarrow strip shaded area, with the lightest shade becomes indistin-guishable). Furthermore, as highlighted by McDougall and Jackett(2007), there is a strong tendency for the probability distributionto align itself with the isolines density at each depth – which theycall ‘‘thinness in S �H � P space’’.
Isolines of q�0 in the (H,S)-plane tend to rotate counterclock-wise with increasing depth (thermobaric effect) and exhibit a gen-tle curvature (cabelling). However, as assured by the constructionof EOS, the q�0 does not have tendency to increase with depth.The density range for observed (H,S) is much reduced; e.g., atz ¼ 5000 m, H � 3.50, S = 34.50/00, and q�0 stays close to zero, in
contrast with qin situ � 1050 kg/m3 (see Fig. 19, left column, inSM2003; note that field plotted there is qin situ � 1000).
The coefficients a and b are plotted in the center and right col-umns of Fig. 1. a shows a significant increase with depth, while bdecreases slightly. One notices some differences in values and inpatterns compared to Fig. 19 in SM2003, especially for b. Forexample, at z ¼ 5000 m, H � 3.50 C and S = 350/00 b = 0.760 inthat Fig. 19, while here b = 0.745 in Fig. 1. The difference of �2%is explained by rðzÞ, which is responsible for the density differ-ence between qin situ � 1050 vs. q�0 � 1027:4 here, so thatb½Fig: 19�=qinsitu � b½Fig:1�=q�0. Similar adjustment occurs for a,and, as the result, adiabatic differences of stiffened density normal-ized by q�0 (using Boussinesq-like rules) are now close to thatcomputed from a full EOS (4.1), but normalized by qin situ (non-Boussinesq rules).
As shown in Section 2, the most important requirement for EOSis to accurately reproduce a and b as functions of depth within thesubspace of naturally occurring H and S values. Furthermore,because hydrostatic models are especially sensitive to the occur-rence of negative stratification, the accuracy of representation ofthe ratio of a/b is even more valuable than the accuracy of a and

10 Although Dewar et al. (1998) did not explicitly identify in their formulas that theyused a Boussinesq code, this choice is evident from their Footnote 2, which discussesnon-existence of sound waves and the absence of a time derivative in the continuityequation, as well as from the general context of the MOM2 code available at that time,which they used.
11 Note that while Dukowicz (2001) suggests using both reference pressureP0 = �q0g z in EOS and stiffening of EOS at the same time, either measure takenalone is sufficient to solve the Case A dilemma of Dewar et al. (1998) in a Boussinesqmodel, cf., (2.11). However both measures are needed in the more general barocliniccase.
12 It is interesting to note that the idea of increasing/decreasing velocities dependingon local density to eliminate approximation errors can be traced back to Oberbeck(1888, Sec. II, paragraph (5)) who was interested in explaining steady motions in theatmosphere.
13 This requires knowledge of the state of free-surface (or bottom pressure in a non-Boussinesq code) which becomes available only after the advance of barotropic modeis complete. This obstacle is typically addressed by one-time-step lag of the pressurefield in EOS, e.g., Griffies and Adcroft (2008, see Sec. 11.4 there).
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 51
b taken separately (e.g., this occurs in southern part of AtlanticOcean characterized by the fresh, but cold near-surface layer ontop of warmer, but more saline deeper water, resulting in a ther-modynamically delicate situation with very week overall stratifica-tion, and the possibility of cabbeling and thermobaric instabilities,Paluszkiewicz et al., 1994; McPhee, 2000). This is also true formodeling deep currents in the presence of H and S anomalies,which tends to cancel effects of each other, e.g., Mediterranean out-flow. Therefore, we evaluate the differences between a, b, and a/bcomputed using (4.6), (4.7) against its prototype (4.4), which is theunapproximated stiffened EOS (Fig. 2). On each panel we indicatethe domain of interest with a dashed-line box surrounding ob-served (H,S) values. The error in computing a within the domainof interest can be estimated as ± 0.0001 at z ¼ 1000 m; ± 0.0005at z ¼ 2500 m; and ± 0.002 at z ¼ 5000 m. For b similar errorsare ± 0.0004 at z ¼ 1000 m; ±0.001 at z ¼ 2500 m; and ±0.005 atz ¼ 5000 m. These error estimates are conservative because the ob-served (H,S) areas (shaded) occupy only a fraction of the domainsof interest we have defined. Normalized by the relevant values of aand b, the relative errors for both quantities stay within ±0.5%. Thisis substantially more accurate than in Fig. 20 of SM2003, and whatis essentially new here is that zero-error line is always placed closeto the middle of the shaded area. The computation of a/b a betteralignment of the zero-error line with the shaded area. This is asomewhat unexpected benefit of EOS stiffening: the multipliersrðzÞ essentially plays the role of a preconditioner to EOS of Jackettand McDougall (1995) by removing most of the nonlinear depen-dency from depth (pressure). The remaining q� can be more accu-rately fit by the simple function in (4.7). (Note that the for smalldepth, z ¼ 200m, the error pattern of a/b-ratio has a saddle pointin the vicinity of observed data, which makes a second-ordersmallness of error as H, S depart from it.)
5. Does Boussinesq approximation still offer any simplification?
During the review process we were challenged why a Bous-sinesq code should still be used, given the recent theoretical enthu-siasm and advocacy for the non-Boussinesq alternative (McDougallet al., 2002; Greatbatch and McDougall, 2003; Marshall et al., 2004;Griffies, 2004). While we acknowledge that some aspects of oceanicmodeling become more natural in the non-Boussinesq framework,notably the response to thermodynamic forcing (Mellor and Ezer,1995; Huang and Jin, 2002), the value of Boussinesq approximationis due to accuracy and dynamical parsimony in retaining the impor-tant behaviors in oceanic circulation while excluding extraneous ef-fects (e.g., acoustic waves) that can be computationally difficult(Spiegel and Veronis, 1960; Mihaljan, 1962; Zeytounian, 2003).The non-Boussinesq generalization does not bring in any importantadditional circulation behaviors (Greatbatch, 1994; Dukowicz,1997) and a posteriori comparison between Boussinesq and non-Boussinesq results has shown that other aspects of the modelingcodes (specifics of initialization, version of EOS, etc.) produce com-parable or even greater sensitivities (Losch et al., 2004).
If one seeks a non-hydrostatic generalization of an oceanic sim-ulation code for smaller, faster dynamical phenomena, the Bous-sinesq approximation offers a major simplification by excludingdynamic pressure from EOS, which allows a decomposition ofpressure into hydrostatic free-surface, hydrostatic baroclinic, andnon-hydrostatic components that then can be treated in quasi-independent ways (e.g., Kanarska et al., 2007). For hydrostaticcodes, the simplifications due to Boussinesq approximation aresomewhat less pronounced (besides the logistical efficiency ofnot having to compute q-weighted control volumes) which leadsto the conclusion that Boussinesq approximation is not useful atall, because one can solve an non-approximated system instead(e.g., de Szoeke and Samelson, 2002; Marshall et al., 2004). Still,
there are fewer feedback loops and interdependencies among thethe model equations in the Boussinesq case, and accordingly, fewerdecisions about numerical splittings are to be made. In this andprevious studies we have described generally successful treatmentof computationally delicate couplings between mode-splitting,time-stepping, and realistic EOS algorithms in a Boussinesq codewith accurate, numerically stable and efficient mode-splitting pro-cedure without the necessity of excessive time filtering, with tracerconservation and constancy preservation and with acceptableEOS-related errors in the PGF. In this section we examine howthese coupling issues are manifested in a non-Boussinesq algo-rithm like the ones presently used (e.g., in MOM4; Griffies, 2004)and suggest some directions for further non-Boussinesq modelimprovements.
Realistic oceanic simulation brings two particular issues thatare outside the standard consideration of the Boussinesq approxi-mation: the free surface f and the necessity to reintroducecompressibility and pressure into EOS in order to obtain a correctdescription of the thermobaric effect and other EOS-related nonlin-earities. These issues raise subtle questions, most importantlywhether to use the full dynamic pressure P in EOS or approximateit with, e.g., the reference value P0 = �q0gz; the classical Boussinesqdoes not offer any guideline. Dewar et al. (1998) found that there isa quantitatively significant sensitivity to this choice and advocatedthe use of full dynamic pressure in EOS computed self-consistentlybetween q and P related by hydrostatic balance. Dukowicz (2001)pointed out the error discovered by Dewar et al. (1998) is self-canceling in a non-Boussinesq model, because the pressure gradi-ent and density are essentially multiplied by a common multiplier,and the modification proposed by Dewar et al. (1998) actuallybrings error into the Boussinesq code they used10 [see also Section 2following (2.11)]. Dukowicz (2001) proposed to correct the PGF errorwhile keeping both the Boussinesq approximation and the the use ofreference pressure in EOS by stiffening the latter.11 However, his ap-proach received limited support. At first, because of the alternativeproposal to re-interpret Boussinesq velocity as normalized mass fluxper unit area qu/q0 as described by McDougall et al. (2002).12 Theyadvocate full P in EOS and demonstrated that no EOS stiffening is re-quired to obtain correct geostrophically-balanced flow. A side effectof their approach is that it disturbs the relationship between Coriolisand advection terms, which interferes with the derivation potentialvorticity conservation even in the simplest case of barotropic, butslightly compressible fluid with free surface (Appendix A). Secondly,by noting that in a hydrostatic model it is actually not very difficultto compute density via EOS using in situ pressure self-consistentwith the density being computed,13 therefore negating one of thestarting arguments of Dukowicz (2001). The third reason for littleinterest in Dukowicz (2001) comes from the realization that afree-surface, hydrostatic oceanic code can be relatively easy

14 This influence was noticed and suspected to be the cause of numerical instabilityby Killworth et al. (1991, see Eq. (31) and the discussion in Section 3 c. Couplingbetween modes there).
15 Here we emphasize that although Higdon and de Szoeke (1997) is formally non-Boussinesq, one of their starting assumptions is that barotropic changes in freesurface (or bottom pressure) cause proportional changes in thicknesses of each layer.This assumption breaks down if the fluid is compressible.
52 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
converted from Boussinesq to non-Boussinesq by replacing the dis-cretized vertical volume factor q0Dz to qDz (Greatbatch et al.,2001), or by noting that non-Boussinesq equations can be trans-formed into pressure coordinates where they resemble Boussinesqwritten in z-coordinates (de Szoeke and Samelson, 2002; Huang andJin, 2002; Losch et al., 2004; Marshall et al., 2004). Non-Boussinesqmodel requires the use of full dynamic P in the fully compressible,realistic EOS: otherwise it would reintroduce the error pointed outby Dewar et al. (1998). This is natural and requires no extra effort inpressure coordinates (in fact, it is impossible to separate ‘‘coordinate’’pressure, which is also dynamic pressure from EOS pressure), but aspecial effort should be taken if using approach of Greatbatch et al.(2001). The use of dynamic P does not reintroduce acoustic wavesbecause they are excluded by the hydrostatic approximation alone.
What remains somewhat unsettled in the literature is that thechoice of using reference �q0gz vs. full pressure P in EOS is notarbitrary, but should be tied to whether the model is Boussinesqor not. Thus, following the advice of Dewar et al. (1998), Loschet al. (2004, Sec. 2a. Initialization) advocate the use of P in EOSfor both Boussinesq and non-Boussinesq versions of MITgcm theyhave compared and criticize Huang and Jin (2002) for doing itotherwise (P for non-Boussinesq and z for Boussinesq) which isactually a better choice. Similarly, P-dependent EOS appears inBoussinesq equations of Marshall et al. (2004), even thought itclearly breaks the completeness of non-Boussinesq-P—Bous-sinesq-z-coordinate isomorphism, and changing to z-dependentEOS repairs this without causing any downstream contradiction(i.e., EOS depends on coordinate in both cases). The same appliesto de Szoeke and Samelson (2002) who in their remark in Section 3,p. 2197, left column, indicated Dewar et al. (1998) as the reason forthis choice. Furthermore, the classical Boussinesq (with pressure-independent EOS) equations have proper potential-to-kinetic en-ergy conversion resulting in total energy conservation. This prop-erty is lost if a nonlinear pressure-dependent EOS is introducedinto Boussinesq (or anelastic) equations, cf., Ingersoll (2005). Re-cently Young (2010) showed that to maintain the energetic consis-tency in the case of non-linear EOS the dynamic part of pressure inEOS must be excluded, providing yet another argument for using� q0gz in EOS in Boussinesq models.
Once this correspondence is respected, the only surviving argu-ments for EOS stiffening in Boussinesq model are:
� conceptually it brings the model closer to the original Bous-sinesq physical framework where the only density variationswhich matter are the ones which contribute to buoyancy varia-tions (Oberbeck, 1879, 1888; Boussinesq, 1903, see p. VII, pp.154–161, and pp. 172–176 there; Mihaljan, 1962). Bulk com-pressibility does not translate into buoyancy and therefore mustbe excluded. Thermobaric EOS pressure dependency does,hence is to be kept. EOS pressure is decoupled from thedynamic, and becomes basically a function of location (in theclassical Boussinesq EOS pressure is constant or not needed atall). While these guidelines help to simplify theoretical inter-pretations, they actually have very little practical consequencesin the hydrostatic models, and mostly related to the treatmentof free surface. This is not surprising, given that in a Boussinesqmodel the absolute density (as opposite to density perturba-tion) appears only in the context of free-surface part of pressuregradient term. Our analysis reveals that while bulk compress-ibility is mainly dynamically passive (Sections 3.1, 3.3, and3.4), its re-introduction into a Boussinesq code brings changeswhich cannot be interpreted as correct physical effects (e.g.,proper decrease of barotropic wave phase speed if compressibil-ity is taken into account; also the appearance artificial multipli-ers q/q0), are dependent on subtle code decisions (e.g.,qEOS(H,S,�z) vs. qEOS(H,S,f � z)) and, not surprisingly again,
are associated with the barotropic mode (Section 3.2). In a non-hydrostatic code these guidelines bring a substantial simplifica-tion by allowing decoupling of the non-hydrostatic pressurefrom buoyant, and treating the former one as Lagrange multi-plier to enforce nondivergence;� as pointed out by Dukowicz (2001), because of nonlinearity of
EOS pressure-dependency (only bulk r(P) nonlinearity is of con-cern for this purpose), remapping P = P(P�) via (2.15) results in amore accurate referencing of bulk pressure in comparison withjust approximating it with �q0gz. In practice this translates intore-tuning of pressure-related coefficients in z-dependent EOS ifthey are originally tuned for using in situ pressure, but no extracomputational cost;� if, due to specific needs of a particular ocean model, there is a
preferred functional form of EOS different from the availablestandard EOS. Separating the bulk pressure effect from EOS‘‘preconditions’’ it to the extent that it can be fitted more easilyor more accurately with the desired form. Similarly, after iden-tifying that bulk compressibility is dynamically passive, exclud-ing it before computing pressure-gradient terms is preferableover relying on numerical cancellation within the PGF schemein a sigma-model; and� all existing mode-splitting algorithms in split-explicit models
can be subdivided into two categories:
(i) a priori ‘‘physicist’s’’ splitting by extracting a shallow-waterlike ‘‘fast’’ term (for Boussinesq models this is typically,�gDr\f or � (gD/q0)r\(qsurff), where qsurf is surfacedensity at surface; and for non-Boussinesq �ðg=q0Þpbr?p0bwhere pb and p0b are bottom pressure and its perturbation rel-atively to static reference) from the vertically-integrated PGF,while the remainder is treated as slow-time ‘‘forcing’’ (e.g.,Berntsen et al., 1981; Blumberg and Mellor, 1987; Bleck andSmith, 1990; Killworth et al., 1991, see also Sec. 7.7 in Griffies,2009, for an overview). In this approach no effort is made totake into account the influence of stratification within theterms recomputed during fast-time stepping14; and
(ii) ‘‘mathematical’’ splittings motivated by the operator-splitting theory, where the fast-time pressure-gradientterms are designed to capture as close as possible (subjectto practicality of implementation and cost) the time tenden-cies of the non-split 3D system. In practice this translates inintroduction of a special density-weighting into ‘‘fast’’ terms.The residual ‘‘forcing’’ terms have very minor dependency onthe state of free surface field. Higdon and de Szoeke (1997),Hallberg (1997), and SM2005 belong to this category.
Both techniques rely on essentially the same small parameters,notably separation of time scales between the baroclinic and baro-tropic processes which is ultimately linked to the smallness of den-sity perturbations, however the second captures the leading-ordercorrections due to non-uniform density and treats them as ‘‘fast’’,while the first one keeps them within ‘‘forcing’’. Naturally, algo-rithms from the second category produce more accurate splitting(second-vs. first-order errors with respect to the associated smallparameters) and require less fast-time filtering for the numericalstability. However, they are also tend to be more code-specific,and, more importantly, none of the available to date is designedto be compatible with fully-compressible EOS.15 For Boussinesq

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 53
model like ROMS it is acceptable, if EOS is stiffened. Conversely, re-introduction of bulk compressibility depletes its order of accuracyfrom the second to the first, thus negating the advantage in splittingaccuracy relatively to the first group.
For non-Boussinesq models with fully compressible EOS a split-ting algorithm comparable in accuracy with that of Higdon and deSzoeke (1997) or SM2005 is yet to be designed: using dynamic P isEOS also means that f influences EOS via P, which means thatdependency must be somehow reflected within the ‘‘fast’’ terms.Parameter estimate in Section 3.2 suggests that the influence ofcompressibility on barotropic phase speed is at least as large asthe influence of stratification, thus neglecting the former wouldnegate any accuracy advantage of Higdon and de Szoeke (1997)or SM2005 in comparison with simple splitting, if fully compress-ible EOS is used.
5.1. Comparison of discrete time stepping in Boussinesq and non-Boussinesq models
The ROMS time-stepping algorithm guarantees that the follow-ing semi-discretized equations hold exactly:
Dznþ1k ¼ Dzn
k � Dt � r?ðDzkukÞ þwkþ1=2 �wk�1=2� �nþ1=2 ð5:1Þ
Dznþ1k ¼ Dzk Dzð0Þk ; hfinþ1
� �¼ Dzð0Þk 1þ hfinþ1
=h� �
ð5:2Þ
hfinþ1 ¼ hfin � Dt � r?hhUiinþ1=2 ð5:3Þ
XN
k¼1
Dzk ¼ hþ f and hhUiinþ1=2 � hhU;Viinþ1=2
¼XN
k¼1
Dzkuk;XN
k¼1
Dzkvk
( )nþ1=2
ð5:4Þ
Dznþ1k qnþ1
k ¼ Dznkqn
k � Dt � r?ðqkDzkukÞ þ qkþ1=2wkþ1=2
h�qk�1=2wk�1=2
inþ1=2; ð5:5Þ
where for symbolic simplicity we omit horizontal indices, tracer dif-fusion terms, and heat and fresh-water fluxes at the ocean surface.Dt is the ‘‘slow’’-time step (for the 3D ‘‘baroclinic’’ mode); time indi-ces n and n + 1 correspond to slow-time as well; r\ is the two-dimensional, horizontal-coordinate divergence operator; Dzk arethe vertical grid-box heights which depend on f and are thereforetime-dependent and also depend on the horizontal coordinatesthrough f and topography; and q 2 {H,S, . . .} is material concentra-tion (tracer). Eq. (5.2) states that Dzk are computed by perturbingDzð0Þk which correspond to f = 0. ROMS uses the specific way of per-turbing them given by the rightmost part of (5.2), but in principle itmay be by any other choice that satisfies the left condition (5.4)[e.g., the rescaled-height version of the MITgcm (Adcroft and Cam-pin, 2004); an implementation of the coastal coordinate of Staceyet al. (1995); and models that allow only the uppermost grid-boxto change with f while keeping all others fixed, as in MOM/POP(Griffies, 2004) and TRIM (Casulli and Cheng, 1992; Rueda et al.,2007)].
In ROMS the barotropic mode is integrated forward explicitly in‘‘fast’’-time using much smaller time steps than the rest of the sys-tem. A special fast-time-averaging procedure is employed to en-sure that the averaged hfi and hhUii are exactly matched to satisfythe slow-time free-surface Eq. (5.3). This can be, in principle,replaced with an implicit free-surface algorithm using specialprecautions (Campin et al., 2004) to ensure that (5.3) is still re-spected. In either case, once fn+1 is known, all grid-box heightsDznþ1
k within each vertical column (k = 1, . . . ,N) are slaved to it. This
leaves the slow-time continuity Eq. (5.1) no other role than com-puting vertical velocity wk+1/2, which in this context has the mean-ing of finite-volume fluxes across the interfaces betweenvertically-adjacent grid boxes moving with f. The compatibilityconditions (5.4) ensure that the bottom and top kinematic bound-ary conditions for vertical velocity computed are satisfied. whilethere is some freedom in choosing how to compute the flux-vari-ables with time index n + 1/2 (n.b., multiple variants of ROMS codeexist), two important properties of (5.1)–(5.5) must always be re-spected: formally substituting qk � 1 into (5.5) turns it into (5.1),and vertical summation of (5.1) results in (5.3). These guaranteethat the tracer Eq. (5.5) have simultaneous conservation and con-stancy-preservation properties. Eq. (5.1)–(5.5) are solved explicitlyand sequentially (non-iteratively) as described in SM2005: com-pute r.h.s. terms for the 3D momentum equation; compute forcing(coupling) terms for the barotropic mode; update barotropic vari-ables and their fast-time-averaged values hf;U;Vi and hhU;Vii; up-date 3D momentum equations and enforce the compatibilityconditions (5.4); advance tracer concentrations with (5.5); thenroll the procedure over to the next time step. Notice that EOS doesnot participate anywhere in (5.1)–(5.5) it is needed only at thestage of computing the PGF for the momentum equation. We referthis type of algorithm as a logically-Boussinesq, hydrostatic, free-surface code.
Next, consider the non-Boussinesq version of (5.1)–(5.5):
qnþ1k Dznþ1
k ¼ qnkDzn
k � Dt � r? qkDzkukð Þ þ qkþ1=2wkþ1=2
h�qk�1=2wk�1=2
inþ1=2ð5:6Þ
Dzk ¼ Dzk Dzð0Þk ; f� �
ðunchangedÞ ð5:7Þ
�qnþ1 hþ fnþ1� �¼ �qn hþ fnð Þ � Dt � r?hh�qUiinþ1=2 ð5:8Þ
where
�q ¼ 1hþ f
�XN
k¼1
Dzkqk andXN
k¼1
Dzk ¼ hþ f ð5:9Þ
hh�qUiinþ1=2 � hh�qU; �qViinþ1=2 ¼XN
k¼1
qkDzkuk;XN
k¼1
qkDzkvk
( )nþ1=2
ð5:10Þ
qnþ1k Dznþ1
k qnþ1k ¼ qn
kDznkqn
k � Dt �r?ðqk � qkDzkukÞ
þqkþ1=2 � qkþ1=2wkþ1=2 � qk�1=2 � qk�1=2wk�1=2
�nþ1=2
ð5:11Þ
qk ¼ qEOSðHk; Sk; PkÞ where Pk ¼ gXN
k0¼kþ1
qk0Dzk0 þ12
gqkDzk:
ð5:12Þ
All vertical integrations are now done with density weighting. Nev-ertheless, similarly to (5.1)–(5.5), substitution of qk � 1 into (5.11)turns it into (5.6), and the non-Boussinesq free-surface Eq. (5.8) isderived by vertical summation of (5.1). Because of this, the systemconserves mass and the integral content and constancy for each tra-cer. In comparison with its Boussinesq counterpart, the new systemexhibits a more sophisticated coupling among the equations. Themajor difficulty is associated with the free-surface Eq. (5.8): oneneeds to know �qnþ1 in advance in order to solve it. But knowing�qnþ1, hence qnþ1
k , also requires Hnþ1k and Snþ1
k because qnþ1k is related
to them through EOS (5.12). Ultimately this precludes a sequentialalgorithm comparable to that for (5.1)–(5.5).
There are two known approaches to address this dilemma. Thefirst one is by Greatbatch et al. (2001) who proposed to break the

54 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
cyclic dependency by replacing qnþ1k and qn
k with their forward-extrapolated values,
qðeÞnþ1
k ¼ 2qnk � qn�1
k and; similarly qðeÞn
k ¼ 2qn�1k � qn�2
k ; ð5:13Þ
everywhere throughout (5.6)–(5.12) where they appear in the con-trol volumes. Subsequently this approach was adopted in MOM4(Griffies, 2004). A similar extrapolation was applied to convert asigma-coordinate model (Mellor and Ezer, 1995), with credit givento then unpublished work by Greatbatch and Lu). Despite the factthat qn
k is available before the update of (5.6)–(5.12) begins, it can-not be used in Dzn
kqnk , because doing so implies that during the next
time step qðeÞnþ1
k will be replaced with qnþ1k when it becomes avail-
able;because qðeÞnþ1
k –qnþ1k , this results in loss of mass conservation.
With this precaution taken, however, the discrete mass and tracerconservation properties exist in form ofX
i;j;k
DAi;jDzni;j;k 2qn�1
i;j;k � qn�2i;j;k
� �¼ const
Xi;j;k
DAi;jDzni;j;kqn
i;j;k 2qn�1i;j;k � qn�2
i;j;k
� �¼ const; ð5:14Þ
where DAi;j is the horizontal area of grid element i,j. This is notas accurate as mass, heat, and salt content conservationexpressed in terms of simultaneous variables (i.e., computed asP
DAi;jDzni;j;kqn
i;j;kqni;j;k with qn
i;j;k and qni;j;k ¼ ðH; SÞ
ni;j;k related by EOS).
However (5.14) still guarantees that the associated errors arebounded with no tendency of accumulation with time. Additionally,extrapolation with some weights being negative, as in (5.13), isundesirable if monotonicity properties are required (e.g., near sharpfronts or extreme salinity anomalies associated with river out-flows); and, as we will show in the next section, extrapolation(5.13) is a source of mode-splitting error and may cause numericalinstability.
The second, and actually more promising approach to addressthe solvability of (5.6)–(5.12) in the case of a hydrostatic modelis to convert them into pressure coordinates, (de Szoeke andSamelson, 2002; Marshall et al., 2004). The principal idea is to notethat qk Dzk can be interpreted as vertical pressure increment overgrid box Dzk, hence
qnkDzn
k ¼ ð1=gÞDpnk and qnþ1
k Dznþ1k ¼ ð1=gÞDpnþ1
k ; ð5:15Þ
after which (5.6)–(5.11) can be rewritten as
Dpnþ1k ¼ Dpn
k � Dt � r? Dpkukð Þ þ ~xkþ1=2 � ~xk�1=2� �nþ1=2 ð5:16Þ
Dpk ¼ Dpk Dpð0Þk ;pb
� �ð5:17Þ
pnþ1b ¼ pn
b � Dt � r?hhpb �uiinþ1=2 ð5:18Þ
where
pb ¼XN
k¼1
Dpk ð5:19Þ
hhpb �uiinþ1=2 � hhpb�u;pb �viinþ1=2 ¼XN
k¼1
Dpkuk;XN
k¼1
Dpkvk
( )nþ1=2
ð5:20Þ
Dpnþ1k qnþ1
k ¼ Dpnkqn
k � Dt � r? qkDpkukð Þ þ qkþ1=2 ~xkþ1=2 � qk�1=2 ~xk�1=2
h inþ1=2
ð5:21Þ
which are isomorphic to their Boussinesq counterparts (5.1)–(5.5)subject to the correspondence between the variables,
Dpk $ Dzk
pb $ D ¼ hþ f
~xkþ1=2 $ wkþ1=2
ð5:22Þ
where pb is identified as ‘‘bottom pressure’’–the total weight ofwater column. Vertical velocity ~xkþ1=2 computed from (5.16) hasthe meaning of mass flux per-unit-area through, generally speaking,moving pressure surface. The kinematic boundary conditions at thebottom and free surface ( ~x ¼ 0 at both) are respected automaticallybecause vertical summation of (5.16) yields (5.18). All other vari-ables, uk, �u, qk = {Hk,Sk, . . .}, remain the same in both systems. Nei-ther density qk, nor grid-box heights D zk appear anywhere in(5.16)–(5.21), while substitution of q = const into (5.21) converts itinto (5.16) which means that simultaneous constancy and conser-vation of tracers (now in mass-weighted sense) can be achievedindependently from EOS as long as the compatibility conditions(5.18)–(5.20) are respected. Another similarity between the non-Boussinesq pressure-coordinate system and its Boussinesq counter-part is that EOS is involved only in computation of horizontalpressure-gradient terms (also stratification and isopycnic slopesfor the purpose of subgrid-scale mixing parameterization), but notfor density weighting of grid-box heights like in (5.6)–(5.12). How-ever, the role of EOS is reversed: now it is needed to compute grid-box heights, geopotentials Uk+1/2, and, ultimately, free surface,
Dzk ¼Dpk
g� aEOSðHk; Sk; PkÞ;
Ukþ1=2 ¼ gXk
k0¼1
Dzk0 � gh; and f ¼ UNþ1=2
g: ð5:23Þ
The pressure increments Dpk and EOS pressures Pk above are knownas long as pb is known,
Dpk ¼ pb �Dzð0Þk =h where Dzð0Þk ¼Dzð0Þðx;yÞ¼ zð0Þkþ1=2ðx;yÞ� zð0Þk�1=2ðx;yÞ; ð5:24Þ
after which
Pk ¼Pkþ1=2 þ Pk�1=2
2and Pk�1=2 ¼
XN
k0¼k
Dpk0 : ð5:25Þ
Above zð0Þkþ1=2 ¼ zð0Þkþ1=2ðx; yÞ, k = 0,1, . . . ,N, such that zð0Þ1=2 ¼ �h andzð0ÞNþ1=2 ¼ 0 is an a priori defined generalized terrain-following coor-dinate mapping function (cf., Eq. (1.8) from SM2005. Note that inthe case of uniform density q = q0 hence pb = q0g(h + f), the general-ized pressure-sigma coordinate reverts back to the original z-sigma,Eqs. (1.9)–(1.10) from SM2005).
In summary, the principal distinction between the Boussinesqand non-Boussinesq cases is that the Boussinesq free-surface Eq.(5.3) entirely belongs to the barotropic mode (hence does not re-quire any mode-splitting decision about which terms are fast andwhich are slow), while all EOS-related computations occur entirelywithin the slow mode. This is no longer the case in (5.8) as it ap-pears in the approach of Greatbatch et al. (2001). In the pres-sure-coordinate aproach of de Szoeke and Samelson (2002) theequation for ‘‘bottom pressure’’ pb, Eq. (5.18) is entirely ‘‘fast’’,however, despite the terminology, the vertically-integrated pres-sure gradient term cannot be computed from pb alone, but requiresthe knowledge of geopotential heights and free-surface, which intheir turn require the use of EOS (5.23). Because EOS is pressuredependent, and pressure-coordinate levels are scaled by pb (whichbrings ‘‘fast’’ dependency in EOS), the barotropic system is closedvia EOS, which means that in order to develop an efficient andaccurate solver mode-splitting unavoidably involves splitting ofEOS as well. This is inherently related to the incompleteness of iso-morphism associated with free surface: the complete similaritybetween z-coordinate Boussinesq and pressure-coordinate non-Boussinesq system would be only if both are rigid-lid (de Szoekeand Samelson, 2002), see their Section 4), which, in fact, decouples

Fig. 3. Absolute value of characteristic roots of (5.32) corresponding to the physical
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 55
barotropic (i.e., rigid lid) pressure from EOS. In the remainder ofSection 5 we re-examine known mode-splitting techniques in or-der to explore the implication for splitting non-Boussinesq oceanmodels with fully-compressible EOS, while avoiding introductionof additional splitting errors.
5.2. Stability analysis of mode splitting algorithm in Greatbatch et al.(2001)
Using the identity,
�qnþ1ðhþ fnþ1Þ � �qnðhþ fnÞ ��qnþ1 þ �qn
2ðfnþ1 � fnÞ
þ ð�qnþ1 � �qnÞ hþ fnþ1 þ fn
2
!;
one can introduce fast-and-slow splitting into (5.8) as follows (cf.,Eq. (12.56) in Griffies, 200416):
qðeÞnþ1 þ qðeÞn
2� @f@tþ qðeÞnþ1 � qðeÞn
Dt� ðhþ fÞ
þ r?qðeÞnþ1 þ qðeÞn
2� ðhþ fÞ�u
!¼ 0; ð5:26Þ
where qðeÞ is vertically averaged density computed from (5.13). Forthe purpose of the subsequent analysis, we discretize the slow-time, but keep fast-time continuous (i.e., assume that barotropictime steps are sufficiently small that the associated discretizationerrors are negligible in slow-time). Suppose density is computedusing the non-approximated EOS with full P. In this case q dependson f through hydrostatic pressure. This dependency is taken into ac-count within the slow-mode when computing terms containing qðeÞ,but these terms are kept constant during the barotropic time-stepping.
For further simplicity of analysis, we now restrict ourselves tothe situation where density depends on pressure alone (AppendixB). In this case EOS is q = q1 + P/c2, where q1 = const is density atthe surface atmospheric pressure, and c is speed of sound. Thistranslates into the vertical profile q ¼ q1egðf�zÞ=c2 and
�q ¼ q1½egðhþfÞ=c2 � 1�=½gðhþ fÞ=c2�� q1½1þ gðhþ fÞ=ð2c2Þ þ � � ��: ð5:27Þ
Substituting this into (5.26), assuming a flat bottom atz = �h = const, linearizing about the rest state, and using the extrap-olation rule (5.13), we obtain
@f@tþ hr?�u ¼ �1
2� gh
c2 �fðeÞ
nþ1 � fðeÞn
Dt
¼ �12� gh
c2 �2fn � 3fn�1 þ fn�2
Dt: ð5:28Þ
This and the barotropic momentum equation (Appendix B),
@t �uþ gr?f ¼ 0; ð5:29Þ
comprise the barotropic mode. Unlike the more usual situation withsplitting in a stratified Boussinesq model, now it is the free-surfaceEq. (5.28) that receives r.h.s. the forcing term from the slow mode,while there is no slow r.h.s. in the momentum equation. Density q isstill allowed to change due to compressibility, and (5.29) does notimply smallness of density variation in vertical direction.
16 The original code of Greatbatch et al. (2001) uses leap-frog stepping; later a moreadvanced, staggered time placement of tracers and momenta was introduced inMOM4. In this approach stepping of tracers and free surface is from n to (n + 1) thbaroclinic step.
The solution procedure for (5.28), (5.29) uses values of f at theprevious time steps (up to n) to compute the r.h.s. term. (In an oce-anic code this happens through EOS.) Using fn and �un at time t = tn
as the initial conditions, advance them using fast-time stepping tot = tn + Dt. The final values are accepted as fn+1 and �unþ1, and ther.h.s. is recomputed in proceeding to the next baroclinic step.
We now demonstrate that this procedure is computationallyunstable unless some temporal filtering is employed. Without lossof generality consider a one-dimensional analog of (5.28), (5.29),which makes it possible to obtain the solution as a sum of left-and right-traveling Riemann invariants:
@tR
ffiffiffiffiffiffigh
p� @xR
¼ @
@tf
ffiffiffihg
s�u
!
ffiffiffiffiffiffigh
p� @@x
f
ffiffiffihg
s�u
!
¼ �12� gh
c2 �2fn � 3fn�1 þ fn�2
Dt: ð5:30Þ
This is just a linear combination of one-dimensional versionsof (5.28), (5.29). Rþ and R� can be solved for separately
as Rþðtn þ Dt; xÞ ¼ Rþ tn; x� Dtffiffiffiffiffiffigh
p� �þ Qþðtn þ Dt; xÞ and R�ðtn þ
Dt; xÞ ¼ R� tn; xþ Dtffiffiffiffiffiffigh
p� �þ Q�ðtn þ Dt; xÞ, where Q±(t,x) are re-
sponses to the r.h.s. forcing in (5.30) with Q±(tn,x) = 0. Consider a
Fourier component, f�u
� �n
¼ ðkÞn fu
� �eikx where the step multiplier
k is not yet known. Ideally, without the errors introduced but
numerical discretization, its values should be k ¼ e icDtffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�e�gh=c2p
,hence jkj = 1, which corresponds to the finite-time-step phase incre-ments for non-damped left-and right-traveling waves (cf., (B.8) inAppendix B). The phase speed is slightly smaller than that forincompressible fluid. The actual solution of (5.30) is
R ðt; xÞ ¼ kn f
ffiffiffihg
su
!eik x�ðt�tnÞ
ffiffiffiffighp� �
� 12
ghc2 f 2kn � 3kn�1 þ kn�2� �
eikx � e�ikðt�tnÞ
ffiffiffiffighp� 1
�ikðt � tnÞffiffiffiffiffiffigh
p ;
which after reaching t = tn+1 = tn + Dt becomes
R ðt þ Dt; xÞ ¼ kn f
ffiffiffihg
su
!eikxe�ia
� 12�f 2kn � 3kn�1 þ kn�2� �
eikx � e�ia � 1�ia
:
modes as a function of a for � = 0.025, corresponding to h = 5500 m andc = 1500 ms�1. Because the mode-splitting ratio Dt/Dtfast is expected to besignificantly larger than unity, a is allowed to exceed p, hence entering the range,where barotropic motions are aliased, if sampled with the baroclinic time steps,tn, tn+1 , . . .. Only two periods are shown; the continuation in a is nearly periodic withdamping toward jkj = 1; jkj > 1 means numerical instability.

17 These sums do not rely on a particular structure of the vertical coordinate and areself-normalizing in the sense that substituting q�0k � 1 yields q�0 ¼ cq�0 ¼ 1. Eventhough Dzk depends on f, the resulting q�0 and cq�0 are only weakly dependent throughEOS pressure, but the f-dependency through Dzk cancels out (cf., Eq. (3.23) inSM2005). This makes it possible to use the most recently available Dzk to compute q�0and cq�0 .
56 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
The quantities a ¼ kDtffiffiffiffiffiffigh
pand � = gh/c2 have the same meaning as
in Appendix B. Since R ðt þ Dt; xÞ ¼ knþ1 f ffiffihg
qu
� �eikx,
k f
ffiffiffihg
su
!¼ f
ffiffiffihg
su
!e�ia � 1
2�f 2� 3k�1 þ k�2� �
� e�ia � 1�ia
:
ð5:31Þ
This pair of equations is homogeneous for ff; ug, which means thatit admits non-trivial solutions only for the specific values of k deter-mined by the characteristic equation,
k2 � 2k cos aþ 1þ 12�ð2� 3k�1 þ k�2Þ sina
a¼ 0: ð5:32Þ
The limit of �? 0 recovers k = e±ia, and one can also verify thatk � e±ia(1��/4) for a,�� 1, which matches (B.9) in Appendix B. Forlarge a but still small �, the splitting procedure distorts the ampli-tude, resulting in a possible numerical instability, jkj > 1 (Fig. 3).This mechanism is generic to mode-splitting instability, and it isassociated with phase-delay of the slow-time r.h.s. terms—com-puted only once at the beginning of the fast-time-stepping and keptconstant thereafter—relative to the more rapidly changing phase offast-time terms. Because a has the meaning of phase increment forthe barotropic wave during one baroclinic step Dt, a may exceed ± pby several multiples, depending on the mode-splitting ratio. Theinstability occurs even if the fast-and slow-time algorithms are bothstable if taken separately, and even if there is numerical dissipationwithin the slow-mode algorithm.
The remedy for instability is a more accurate splitting; i.e., elim-inate or reduce the �-terms, or to introduce artificial damping inthe fast-time-stepping, essentially preventing it from entering intothe aliasing range jaj > p while still maintaining jkj near unity. Inthe MOM4 code this is achieved by uniform averaging of both fand �u over a 2Dt interval, or 1Dt in the case of staggered time-step-ping (Sec. 12.5 of Griffies, 2004). This introduces damping compa-rable to that of a backward-Euler implicit step and reduces thetemporal accuracy to first-order. A gentler fast-time-averagingshould take into account this instability mechanism, which is com-parable in its strength with that associated with the splitting ofPGF terms (items (iii) and (iv) in Section 3.2). Furthermore, becauseof its specific form of fast-time averaging, MOM4 does not have ex-act discrete consistency between the averaged free surface andaveraged volume or mass fluxes (for the Boussinesq or non-Bous-sinesq variants) in the slow-time step. Thus, the content conserva-tion or constancy preservation properties for tracer advectioncannot be maintained simultaneously, and one must chose be-tween them. The selected choice is constancy, implemented byan auxiliary slow-time step for f in Eq. (12.95) of Griffies (2004)).This f is then used to compute new-time-step control-volumesfor the tracer update but thereafter discarded. The loss of contentconservation comes from the fact that the f updated this way isnot equivalent to that obtained from the barotropic mode, result-ing in a difference in control volumes. (Another source of non-con-servation is the Robert-Asselin filter needed in the case of leap-frogtime-stepping.) The choice of vertical grid that allows a change ofonly the top-most grid-box height with f only (while all others arefixed) results in a slight redistribution of discrete values of densitywithin the vertical column in the case of purely barotropic mo-tions. The existing non-Boussinesq splitting algorithms neglect thiseffect, which leads to some non-conservation of mass.
5.3. A method for stabilizing algorithm of Greatbatch et al. (2001) bysplitting EOS
Dukowicz’ idea factoring of EOS provides a guideline to improvestability and splitting accuracy in (5.26) by moving most of f
dependency in EOS into the fast mode. Without any approximationEOS can be rewrittem as
q ¼ r � q�0 þ q�0� �
; ð5:33Þ
where r = r(f � z) chosen to absorb most of the EOS compressibility,but is also simple to compute; q�0 ¼ const is chosen in such thatq�0 � q�0, and q�0 is only weakly dependent on f. With (5.33) onlythe second parenthetical factor need be extrapolated in time. Then
@
@t
Z f
�hqdz ¼ @
@t
Z 0
�1q � ðhþ fÞdr
¼ @f@t
Z 0
�1q�0 þ q�0� �
r þ ðhþ fÞ @r@f
�dr
þZ 0
�1r@q�0
@tðhþ fÞdr: ð5:34Þ
Choosing r ¼ egðf�zÞ=c2 (which in r-coordinate becomesr ¼ e�rgðhþfÞ=c2 ¼ e�r�, where c is a representative constant valuefor speed of sound) converts the above into
@f@t� q�0ð1þ �Þ þ
Z 0
�1q�0ð1� 2r�Þdr
�|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
\fast"
þðhþ fÞ �Z 0
�1
@q�0
@tð1� r�Þdr|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
\mostly slow"
ð5:35Þ
where we have expanded r = e�r� � 1 � r� + � � � for �� 1.Even in the simplest case of barotropic compressible fluid,
q = q1 + P/c2 (hence q�0 ¼ q1 and q�0 � 0) the expression inside[. . .] in the ‘‘fast’’ term is not equivalent to vertically averaged den-sity �q–as follows from (5.27) �q ¼ q1ð1þ �=2Þ in this case instead ofq1(1 + �). This non-equivalence leads to the replacement of (5.28)with
ð1þ �Þ@tfþ 1þ �=2ð Þhr?�u ¼ 0; ð5:36Þ
which in combination with (5.29) yields the correct barotropicphase speed in agreement with (B.9). Unlike (5.28) the above doesnot have any r.h.s. at all, hence produces no splitting error.
In the general case of q�0 – 0, splitting (5.35) requires forwardextrapolation of q�0 as in (5.13) with subsequent computation ofthe two-dimensional fields,
q�0 ¼Z 0
�1q�0 dr and cq�0 ¼ �2
Z 0
�1q�0rdr; ð5:37Þ
with their discretized formulas,17
D ¼XN
k¼1
Dzk; q�0 ¼ 1D
XN
k¼1
Dzkq�0k ;
cq�0 ¼ 2D2
XN
k¼1
DzkDzk
2þXN
k0¼kþ1
Dz0k
!q�0k
( ): ð5:38Þ
With (5.35), the non-Boussinesq nonlinear free-surface equation is
q�0 þ q�0 þ q�0 þ cq�0� �g
hþ fc2
�� @f@t
þr? q�0 þ q�0 þ q�0 þ cq�0� �g
hþ f2c2
� �ðhþ fÞ�u
�¼ �ðhþ fÞ @q
�0
@tþ @
cq�0@t
ghþ f2c2
" #; ð5:39Þ

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 57
where we back-substituted � = g(h + f)/c2 to expose all f dependen-cies. The most accurate (but also the most complicated) time-split-ting procedure precomputes the r.h.s. time derivatives of q�0 and cq�0using slow-time variables, and keeps them constant during baro-tropic time-stepping, while all f-terms, including the ones ing(h + f)/c2 in both l.h.s. and r.h.s., are allowed to change at everybarotropic step. The splitting error of this algorithm can be esti-mated as Oð�2Þ and Oð� � Dðc2Þ=c2Þ. It does not rely on the smallnessof q�0=q�0. This algorithm replaces (5.14) withX
i;j;k
DAi;jDzni;j;krn
i;j;k q�0 þ 2q�0n�1i;j;k � q�0n�2
i;j;k
� �¼ const
Xi;j;k
DAi;jDzni;j;kqn
i;j;krni;j;k q�0 þ 2q�0n�1
i;j;k � q�0n�2i;j;k
� �¼ const:
ð5:40Þ
These are closer to the simultaneous field-conservation laws sincern
i;j;k is computed using the same f as used to compute Dzni;j;k and
all f-terms in (5.39) evolve in fast-time with r evolving synchro-nously with f without any splitting.
A simplified, but slightly less accurate procedure for (5.39) canbe devised by precomputing cq�0gðhþ fÞ=c2-terms at the beginningof barotropic stepping using fn and combining them with q�0 þ q�0.This admits additional Oð� � f=h � q�0=q�0Þ ¼ Oðgf=c2 � q�0=q�0Þ-errors(definitely negligible in any practical case). Finally, precomputingq�0gðhþ fÞ=c2 using fn brings Oð� � f=hÞ ¼ Oðgf=c2Þ errors. This isonly marginally more computationally demanding than the non-linear analog of (5.28). Even in this case the splitting is more accu-rate than (5.28), which admits Oð�Þ error. However, thesesimplifications cause loss of synchronization between rn
i;j;k andDzn
i;j;k, resulting in some compromising of the conservation proper-ties (5.40).
Splitting of PGF terms in the non-Boussinesq case follows Sec-tion 3.2 using EOS (5.33). The multiplier r can be moved outsidethe pressure gradient operator (2.14) and furthermore can be sep-arated from the influence of f via (3.10). This means that q⁄ and �qare now expressed entirely in terms of q�0 and q�0, so the differencefrom the Boussinesq model is in the appearance of r-terms as amultiplier in the PGF when the momentum equations are rewrittenin conservation form.
5.4. An overview of mode-splitting algorithms in non-Boussinesqmodels
Regardless of the type of vertical coordinate, vertical integrationof non-Boussinesq momentum and mass-conservation equationyields,
@
@t�qD�uð Þ þ g r?
q�D2
2
!� �qDr?h
" #|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼�F
¼ advection; Coriolis;
dissipation; forcing terms;@tð�qDÞ þr?ð�qD�uÞ ¼ fresh-water flux;
ð5:41Þ
where D¼hþ f; �q¼ 1D
R f�h qdz; q� ¼ 2
D2
R f�h
R fz0 qdz0dz; �u¼ 1
�qD
R f�h qudz
are the total depth of water-column, vertically-averaged density,vertically-averaged ‘‘dynamic’’ density [both are the same as in(3.19)], and vertically-averaged density-weighted velocity, respec-tively. The derivation of pressure-gradient term in this form canbe found in Section 3.1 of SM2005, up to Eq. (3.15), with the onlydifference is that �q! q0 in terms containing time derivatives andin the definition of �u if Boussinesq approximation is applied. Anal-ogous derivations, but expressed in terms Montgomery potentialcan be found in Higdon and de Szoeke (1997, see their Section 2.1,note the appearance of triangular sum in the second unnumbered
equation following (2.11) there), and also in Hallberg (1997). Theabove can be rewritten in terms of bottom pressure, pb � g�qD,
@
@tpb �uð Þ þ g r?
q��q� pbðhþ fÞ
2
� �� pbr?h
�|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼�F
¼ � � �
@tpb þr? pb �uð Þ ¼ � � �
ð5:42Þ
where the new prognostic variable pb is more natural for non-Bous-sinesq models because it appears as a single prognostic variable un-der time derivative in the second equation, however, the presenceof f in PGF terms separately from �q or pb cannot be eliminated com-pletely. It should be noted that despite the common meaning F ’shave different dimensions in (3.14), (5.41) and (5.42) – relativelyto (5.41), F is divided by q0 in (3.14) and is multiplied by an extrag in (5.42). Nevertheless, for notational simplicity we retain thesame symbol F for all versions, and, consistently with SM2005and with (3.15) in Section 3.2, we choose the sign of F as it appearsin the r.h.s. of barotropic momentum equations, hence negative signin (5.41) and (5.42).
Mode-splitting requires decomposition of vertically integratedPGF into
F ¼ �g½. . .� ¼ \fast"þ \slow" ð5:43Þ
where ‘‘fast’’ term can be efficiently computed from either pb, �qD, orf field – whichever plays role of prognostic variable in the barotrop-ic continuity equation, while ‘‘slow’’ must be made as weaklydependent as possible from this variable. The inherent dilemma in(5.41) and (5.42) is that while �qD or pb/g may be considered as a sin-gle variable, in the general case of compressible fluid changes in pb
translate in changes in both free surface f (hence changing D) and �q(via dependency from pressure through EOS). In pressure-basedcoordinated, knowing pb means that the distribution of pressurethroughout the water column is known, so one can use EOS to com-pute specific volumes at each grid box, after which grid-box heightsbecome known as well. Vertical summation of heights yields D, andtherefore free surface f = D � h. However, this would work only ifthere is no mode splitting, because it involves using EOS to computea 3D field, and EOS depends on pb, which changes in fast time.Therefore a computationally efficient time-split model should em-ploy some sort of approximation to allow computation of f via pb
in fast time solely from two-dimensional barotropic fields. Thesecond aspect is that in the presence of stratification and non-uni-form topography F consists parts which tend to cancel each other,so any splitting which disregards this balance is doomed to beinaccurate.
SM2005 (cf., Eq. (3.15) there) addressed the latter issue by can-celing the large terms by hand, first by rewriting the upper Eq.(5.41) as
@t �qD�uð Þ þ gD q�r?fþD2r?q� þ ðq� � �qÞr?h
� ¼ � � � ð5:44Þ
and, subsequently, substituting D = h + f into gD{. . .} term and sep-arating terms which depend on f from those which do not. Theresultant f-dependent part is given by (3.18) [In SM2005 this isF ¼ Fð0Þ þ F 0 decomposition via Eqs. (3.31)–(3.32) there.] In theBoussinesq case this is all what is needed because f is also prognos-tic variable of the barotropic continuity equation because of the�q! q0 replacement in terms with time derivatives, hence@tð�qDÞ ! @tðq0DÞ ¼ q0@tf. In doing so it is also assumed that both�q and q⁄ are independent of f, which in its turn imposes two restric-tions: (i) either exclusion of f from EOS pressure, or incompressibil-ity of EOS; and (ii) specific functional dependency of how verticalcoordinate system is adjusted by changes in free-surface elevation– proportional stretching.

58 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
The same two issues must be dealt with in the non-Boussinesqcase using bottom pressure instead of free surface. A ‘‘physicist’s’’split extracts the �g pbr\f term18 from the PGF term in (5.42),
F ¼ �g r?q��q� pbðhþ fÞ
2
� �� pbr?h
�¼ �gpbr?f� gr?
q��q� 1
� �� pbðhþ fÞ
2
�� 1
2g pbr?ðhþ fÞ � ðhþ fÞr?pb½ �: ð5:45Þ
Then, utilizing the fact density variations are small relative to itsmean value, pb is dominated by bulk part which does not changein time, so it is convenient to split pb into its reference value andanomaly, which in the simplest case19 are
q ¼ q0 þ q0 q0 � q0;
pb ¼ q0ghþ p0b p0b � q0ghð5:46Þ
after which (5.45) can be rewritten as
F ¼ �gpbr?f� gr?q��q� 1
� �� q0gh2
2þ p0b þ q0gf
2hþ p0bq0gfÞ
2
!" #
� 12
g p0b � q0gf� �
r?h� hr?ðp0b � q0gfÞ þ p0br?f� fr?p0b� �|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼0; if f¼p0b=ðq0gÞ
ð5:47Þso far without any approximation. This still needs a relationship totranslate pb into f within the barotropic mode (hence using baro-tropic variables alone) in order to close the system. In the simplestcase it is approximated as
f ¼ p0b=ðq0gÞ; ð5:48Þwhich turns (5.42) into
@
@tpb �uð Þ þ g q0ghþ p0b
� �r?
p0bq0g|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
\fast"
¼ � gr?q��q� 1
� �� p0bh
�|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
\mixed"
� gr?q��q� 1
� �q0gh2
2
" #|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
baroclinic;\slow"
þ � � �
@tp0b þr? q0ghþ p0b� �
�u� �
¼ � � � ;ð5:49Þ
where dots (. . .) in the first equation indicate other slow terms, suchas advection, Coriolis, forcing, viscous dissipation terms, as well asminor 3D correction terms in pressure-gradient associated withthe fact that (5.48) is only approximately match the actual free sur-face as it is computed by the 3D mode using the actual EOS. Typi-cally only the ‘‘fast’’ term is recomputed at every barotropic timestep, while all other terms are computed by the 3D mode and playthe role of 3D ? 2D forcing. The particular form of ‘‘fast’’ term as in(5.49) appears in Griffies and Adcroft (2008, see Eqs. (182)-(183));also Griffies (2009, see Section 7.7.4, Eqs. (7.137)–(7.139) there). Asimilar approach of considering perturbation p0b relative to a stati-cally-defined rest-state reference field, with subsequent approxi-mate closure to compute geopotential was taken by Marshallet al. (2004, see Eq. (27) and the two paragraphs after it, Eqs.(40)–(42), and, finally, Ul = �bsrs at the end of Section 3a) for anatmospheric model. The actual codes do not compute ‘‘slow’’ and‘‘mixed’’ terms literally as in (5.49), but instead compute the fullbaroclinic 3D PGF term using an appropriate scheme and integrate
18 This particular form is motivated by the PGF term of a barotropic layer ofcompressible fluid, see Appendix B, Eq. (B.2), note the mutual placement of pb and f.
19 A more elaborate decomposition involves using reference profile for density(specific volume) instead of constant value can be found in Appendix B of de Szoekeand Samelson (2002).
it vertically. Since there is no use for �q and q⁄ within the fast term,there is no need to compute them as well, however we explicitly in-clude all the terms in r.h.s. of (5.49) to facilitate the error analysis.
Neglecting all terms except ‘‘fast’’ yieldsffiffiffiffiffiffigh
pfor the phase
speed of external waves. Unlike in the Boussinesq case, it doesnot depend on the choice of q0 and it should not in non-Boussinesqmodels. Although this is mainly correct, three effects are not cap-tured: the slowdown of barotropic speed due to bulk compressibil-ity (Appendix B), stratification (Appendices C and D), andtopographic coupling between free-surface and stratification ifr\h – 0 (cf., the second line in Eq. (3.32) in SM2005). As all threeeffects are present in the 3D mode, and are also depend on the fastvariables, the differences contribute to mode-splitting error. The‘‘mixed’’ term is baroclinic because it vanishes if density is uniformdue to ððq�=�qÞ � 1Þ ! 0, but it also contains p0b which evolves infast time. This term is mainly responsible for baroclinic slowdown(recall that q� < �q for positively stratified fluids) and for topo-graphic coupling, if h – const. It should also be noted that in thecase of compressible fluid the ratio q�=�q also depends on f andp0b due to pressure dependency in EOS, so the ‘‘slow’’ term also con-tains some traces of p0b-dependency. The accuracy of this split relieson the following smallnesses:
q��q� 1
� 1;�q� q0
�q� r?h
� 1;ghc2 � 1 ð5:50Þ
and mode-splitting error has terms proportional of each of thethree. One of the main difficulties specific to the non-Boussinesqcase is the definition of the reference state for pb: while (5.46) byitself is merely a variable change and does not constitute anyapproximation, (5.46) in combination with (5.48) is a rather strongassumption: free-surface elevation f computed by 3D mode via EOSdoes not necessarily agree with (5.48),
f ¼ D� h ¼ pb
�qg� h ¼ h
q0�q� 1
� �|fflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflffl}
bias
þ p0b�qg
vs: f ¼ p0bq0g
: ð5:51Þ
In the case of flat bottom the bias mostly differentiates out from the‘‘fast’’ term �g pbr\f leaving only a minor error of Oðð�q� q0Þr?fÞ,and mostly cancels out from all other terms in (5.47). However, inthe case of non-flat topography the bias does affects the split (hencethe second parameter in (5.50)) and is not easy to remove by includ-ing the ‘‘mostly slow’’ into the terms recomputed during fast-timestepping: if computed as a part of 3D algorithm, it uses the correctvalues of free surface, but once treated as fast, there is no otherchoice than to use an approximate f form (5.48). For the same rea-son it is not easy to modify this algorithm to account for the effect ofslower barotropic phase speed due to the influence of stratificationwithin the ‘‘fast’’ term.20 The other aspect specific to non-Boussinesqcase is that for a fully compressible EOS it is no longer possible tointerpreted the ratio of q�=�q as purely due to stratification: it is af-fected by bulk compressibility as well. In the next section we will de-sign a more accurate split which avoids the use of a statically definedreference state altogether.
5.5. Mode splitting using incremental variables: The Boussinesq case
Because the theoretical rationale for splitting the total fluid mo-tion into barotropic and baroclinic modes mainly comes from theorthogonality of wave motions in the case of linearized equationsover flat bottom, and, accordingly, virtually all theoretical studiesabout numerical stability of splitting algorithms are done in the
20 This aspect is somewhat parallel to the initialization issues for pressure-coordinate models, Griffies (2009, see Sections 7.2, 7.3 there, especially the difficultieswith the sigma-pressure model, Section 7.3.3.7.).

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 59
flat-bottom framework, the justification of splitting in the presenceof bottom topography is more obscure: while the separation oftime scales remains well-defined, the orthogonality principle isno longer valid. Nevertheless, the splitting must be dealt with inthe general case of non-flat bottom despite the fact that a completeanalysis of numerical stability is no longer possible. SM2005 (andeven more so in Section 3.2 Shchepetkin and McWilliams (2008))advance the following principle: the modification of vertically-integrated pressure gradient term by advancing the barotropicmode from 3D time step n to n + 1 should resemble as close as pos-sible the difference between the original and the new vertically-integrated pressure gradient as it would be computed by the 3Dmode using the new free-surface field, but the same baroclinicdensity distribution. The intuitive rationale for this principle isthe presumption that if the barotropic mode drives the barotropicfields toward a new equilibrium when advancing from n to n + 1,that equilibrium should be disturbed as little as possible duringthe next time step. The resultant form of the barotropic pressuregradient term coincides with that of Higdon and de Szoeke(1997) in the case of flat bottom (subject to non-Boussinesq toBoussinesq translation), but it also leads to specific form of topog-raphy-and-free-surface terms, and practical experience of gaining/loosing stability of the model when switching between treating/not-treating these as ‘‘fast’’ terms.
This leads to an equivalent, but alternative to SM2005 interpre-tation of the splitting procedure if we rewrite (5.41) in terms ofincremental variables – basically changes caused by the barotropicmode starting from the initial state corresponding to 3D time stepn. Thus we introduce df = f � hfin, and, consequently, substitute
f! fþ df � hfin þ df hence D! Dþ df � hþ hfin þ df ð5:52Þ
into (5.41) while algebraically separating all terms containing df.The Boussinesq version of it becomes
@
@tq0ðDþ dfÞ�uð Þ � F þ g Dþ dfð Þr? q�dfð Þ þ gq�dfr?f
� gdf2
2r?q� þ g q� � �qð Þdfr?h ¼ � � �
@
@tdfþr? ðDþ dfÞ�uð Þ ¼ � � �
ð5:53Þ
where now only df and �u are changing during the barotropic timestepping (e.g., f is kept constant in fast-time in gq⁄df r\f – the lastterm in the first line of the first equation).
The solution procedure is therefore as follows: before startingthe barotropic mode the full vertically-integrated pressure-gradi-
ent termF ¼ �g r? q�D2
2
� �� �qDr?h
h iis precomputed via the actual
pressure gradient scheme of 3D mode using the state of free-surfaceat time step n and the predicted or extrapolated density field atn + 1/2. Note, this is not equivalent to computing �q and q⁄ firstand then computing F as suggested by this formula using an adhoc spatial discretization – when considering continuous equationsthese two forms are equivalent to each other, but discrete formsthey are not. In a sigma-model not exercising proper care herewould result in an unacceptable pressure gradient error passed intothe barotropic mode. Instead, the precomputed �q and q⁄ are to beused only in terms containing df. Once all preparations arecomplete, the barotropic variables are advanced and fast-timeaveraged,
df ¼ 0�u ¼ h�uin
� �!
hdfinþ1
hðDþ dfÞ�uinþ1
hhðDþ dfÞ�uiinþ1=2
0B@1CA! hfinþ1 ¼ hfin þ hdfinþ1
Dnþ1 ¼ hþ hfinþ1
h�uinþ1 ¼ hðDþdfÞ�uinþ1
Dþhdfinþ1
0BB@1CCA
ð5:54Þ
where, obviously, the initial state for df = 0, and the right-mostoperations symbolize setting new state of the ‘‘slow’’ variables,which are also used as the initial state for the barotropic mode dur-ing the next 3D time step.
In comparison with (3.18) the incremental form (5.53) com-pletely ‘‘hides’’ the baroclinic-topographic hydrostatic balance intothe 3D term. Assuming spatially uniform free surface, hence settingf = const – 0 in (3.18) turns it into �gf½ðhþ f=2Þr?q�þðq� � �qÞr?h�. It must vanish in the case of horizontally uniform(flat) stratification. However its vanishing requires cancellation ofthe two terms inside square braces [�] because in the presence oftopography flat stratification results in non-uniform �q and q⁄.The incremental form (5.53) ensures this cancellation for anyf = const (not necessarily f = 0) as long as the vertically integratedpressure gradient term computed by 3D mode vanishes: recall that3D computing of pressure gradient term is inherently more accu-rate that via �q and q⁄. It should also be noted that smallness ofdf/D is more justifiable than smallness of f/D (or, similarly f/h) be-cause in deep areas where phase barotropic speed is large both aresmall, but comparable, since f may change rapidly per time step, ifbarotropic is running using time step close to the maximum al-lowed by stability. On the other hand, in shallow areas wherefree-surface changes may no longer be very small in comparisonwith depth, the barotropic motions may resolved in 3D time stepresulting is smooth changes, hence df is expected to be smallerthan f. For this reason, if linearization is required, e.g., in the caseof implicit treatment of free surface using a third-party elliptic sol-ver, the use of df in (5.53) provides a more natural approach. Itshould be noted that the most commonly used approach retainsonly the gDr\(q⁄df) term, and usually with q⁄ replaced with q0.Eq. (5.53) suggests two more terms, and notably the very last ofthe first equation couples stratification with topography and freesurface, but still the whole approach yields essentially the same5-diagonal elliptic equation for df.
5.6. Mode splitting using incremental variables: non-Boussinesq casewith fully compressible EOS
Another consequence of incremental form (5.53) is that it canbe generalized to the case of non-Boussinesq model with com-pressible EOS. Similarly to (5.52) we introduce incrementalvariables
�qD! �qDþ dm;
f! fþ df hence D! Dþ df
�q! �qþ d�qq� ! q� þ dq�
ð5:55Þ
after which the barotropic continuity equation becomes
@
@tdmþr?ðð�qDþ dmÞ�uÞ ¼ � � � ð5:56Þ
which identifies dm as the natural fast-time prognostic variable.The incremental form of the non-Boussinesq version of (5.41)
can be derived by noting that
r?q�D
2
2
!� �qDr?h � r?
q��q�
�qD � D2
� �� �qDr?h
!r?q��qþ d
q��q
� �� ��
�qDþ dmð Þ � Dþ dfð Þ2
�� �qDþ dmð Þr?h;
ð5:57Þ
where, we must provide some the means to compute responses dfand dðq�=�qÞ to changing dm. Both relationships involve EOS,

21 To prevent the accumulation of roundoff errors it is useful to extract a constant-in-time bulk part from pb,
pb ¼ pð0Þb þ pb ; where pð0Þb ¼ pð0Þb ðx; yÞ ¼ gq�0Z f¼0
z¼�hr dz;
and use pb as the prognostic variable in instead of pb, meaning that the incrementshdmin+1 are added to pb in (5.70), not to pb. Then, whenever needed, hpbin+1 is com-puted afterward by adding back the bulk part, hpbi
nþ1 ¼ pð0Þb þ hpbinþ1, which can beused everywhere in the code except time differencing and time integration: thesemust still use pb . It can be easily estimated that for typical oceanic conditions pð0Þb
is 3� � �4 orders of magnitude larger than pb , while the contrast between pð0Þb andincrements ghdmi is even greater – so the roundoff errors cannot be ignored, evenwith double precision. However, we emphasize that pb is merely for bookkeeping,and from the mathematical point of view, the splitting algorithm does not rely onthe smallness of pb relatively to pð0Þb .
60 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
however they are needed during fast-time stepping, so they mustbe expressed somehow in terms of 2D fields only.
The principal assumption that at the ‘‘slow’’ time step n thefree-surface field f and the three-dimensional density are in hydro-static equilibrium with each other as governed by fully compress-ible EOS, e.g., given a distribution of masses throughout eachvertical column, hydrostatic pressure is computed by integrationfrom surface downward, after which specific volume and heightof each grid box is computed via EOS, and vertical summation ofgrid box heights results in f. Once the barotropic mode departsfrom the state corresponding to time step n, the change in dm re-sults in change of both free surface df and vertically averaged den-sity d�q in such a way that the hydrostatic equilibrium ismaintained. This means that an increase in dm results in propor-tional increases in both df and d�q,
d�q ¼ 12� � dm
D; df ¼
1� 12 �
1þ 12 � � dm
�qD
� dm�q� 1� 1
2�
� �� dm
�q; ð5:58Þ
where the 12 � � dm
�qD term in denominator quadratically small, and ismerely to keep
�qDþ dm ¼ ð�qþ d�qÞðDþ dfÞ ð5:59Þ
as an exact identity. Above �� 1 is effective vertically integratedcompressibility parameter computed via EOS. In the simplest case(see Appendix B) � = gD/c2, where c is speed of sound, resulting inan estimate � � 0.025 for deep ocean. In a more general case we as-sume EOS in form of
q ¼ rðPÞ � q�0 þ q�0ðH; S; PÞ� �
; ð5:60Þ
where q�0 ¼ const, q�0 � q�0, and ð@q�0=@PÞjH;S¼const � dr=dP, so mostof pressure effect is absorbed into r(P). Since �q ¼ 1
D
R f�h qdz ¼
1D
R f�h r q�0 þ q�0� �
dz ¼ q�0 � 1D
R f�h r dzþ 1
D
R f�h rq�0 dz it is natural to
express
�q ¼ �r � q� ¼ �r q�0 þ q�0� �
where �r ¼ 1D
Z f
�hr dz and
q�0 ¼ 1�rD
Z f
�hrq�0 dz: ð5:61Þ
Change in the total depth of water-column causes proportionalstretching of q� profile (hence q� is not affected by the change),while in contrast, r(P) profile moves up-and-down with free surfacewithout any stretching at all (since it is function of pressure alone)
dm ¼ rbottq�bottdf � rbottq�0df; ð5:62Þ
where rbott and q�bott are bottom values of r and q�. On the otherhand,
dm ¼ 1� 12�
� ��rq� � df � 1� 1
2�
� ��rq�0 � df ð5:63Þ
which leads to an estimate
� ¼ 2ð1� �r=rbottÞ: ð5:64Þ
In the simplest case of vertically uniform speed of sound r is a linearfunction of pressure, �r ¼ 1þ �=2, cf., (3.22). A more general (5.64)accounts for the nonuniformity of c due to its pressure dependency,leaving aside only the temperature effect in the upper ocean.
The ratio ðq�=�qÞ is affected by both compressibility and barocli-nicity, so its behavior is controlled by on EOS. Similarly to (5.61),
q� ¼ r�q�� ¼ r� q�0 þ q�0�� �
; where r� ¼2
D2
Z f
�h
Z f
zr dz0dz and
q�0� ¼2
r�D2
Z f
�h
Z f
zrq�0 dz0 dz; ð5:65Þ
where r⁄ can be estimated as r⁄ = 1 + �/3 in the case of uniform c, cf.,(3.22). Combining the above,
q��q¼ r�
�r� q�0 þ q�0�
q�0 þ q�0� 1� 1
6�
� �� 1� q�0 � q�0�
q�0
� �; ð5:66Þ
which leads to an estimate of how ðq�=�qÞ responds to perturbationin free surface df, and dm,
q��q¼ r�
�r� q��
q�! q��
q�1� 1
6�� 1
6� � df
D
� �� q��
q�1� 1
6�
� �� 1
6� � dm
�qD; ð5:67Þ
where we have neglected quadratically small terms Oð�2Þ andOð� � q�0�q�0�
q�0Þ.
Substitution of (5.58) and (5.67) into r.h.s. of (5.57) turns it into
r?q��q�
1� 16�
� �� 1
6�
dm�qD
� ��
�qDþ dmð Þ Dþ 1� 12 �
� �dm�q
� �2
24 35� �qDþ dmð Þr?h; ð5:68Þ
which, after some algebraic transformation yields
@
@tð�qDþ dmÞ�uð Þ � F þ gDr?
q��q�� 1
2�
� �dm
�þ g
q��q�� 1
2�
� �dmr?fþ g
q��q�� 1� 1
2�
� �dmr?h
þ gr?q��q�� 5
6�
� �dm2
�q� 1
6�
dm3
�q2D
�¼ � � �
@
@tdmþr? ð�qDþ dmÞ�uð Þ ¼ � � � ð5:69Þ
where we have kept terms with all powers of dm, but have droppedall terms with power of � higher than the first, and terms which in-volve quadratically-small product of � by ðq��=q� � 1Þ.
The entire splitting algorithm is therefore formulated as fol-lows: bottom pressure pb is considered to be a prognostostic vari-able, and it evolves in slow time by adding increments g � dm,which are computed (fast-time averaged) by the barotropic mode.Before starting fast-time stepping of barotropic mode from n ton + 1 all necessary terms notably the state of free-surface f and fullvertically integrated PGF terms are precomputed using full 3Dalgorithms with compressible EOS. Also computed at this stageand kept constant thereafter until the next baroclinic time stepare the stiffened density ratios q��=q� needed by (5.69). After thesepreparations, the barotropic mode is advanced toward n + 1,
dm ¼ 0�u ¼ h�uin
� �!
hdminþ1
hð�qDþ dmÞ�uinþ1
hhð�qDþ dmÞ�uiinþ1=2
0B@1CA! hpbi
nþ1 ¼ hpbin þ ghdminþ1
h�uinþ1 ¼ hð�qDþdmÞ�uinþ1
hpbinþ1=g
0@ 1A;ð5:70Þ
where the first column symbolizes setting of initial conditions, thesecond in time stepping of barotropic mode via (5.69) performingfast-time averaging on the way, and the third column is translationback to slow-time variables.21

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 61
The overall structure of (5.69) is similar to its Boussinesq coun-terpart (5.53) with an obvious one-to-one correspondence be-tween all the terms, with the exception of dm2- and dm3-terms inr.h.s. of the first Eq. (5.69). As expected, (5.69) reverts back to shal-low-water equations if ðq��=q�Þ ! 1 and �? 0. What is essentiallynew is that in the general case of q��=q�–1 and �– 0 linearizationof (5.69) around the rest state, f ¼ �u ¼ 0, captures the correctphase speed for the barotropic waves, where both effects – slow-down due to stratification (cf., (3.20), also Appendices C and D)and seawater compressibility (cf., (3.21), also Eq. (B.9) from Appen-dix B.1) – are now accurately represented within the fast modealone, and the phase speed does not depend on the choice of refer-ence constants such as q�0 – and it should not in non-Boussinesqmodels. The derivation procedure for (5.69) also illustrates thatthe contributions due to the two physical effects – baroclinicityand compressibility – cannot be combined into a single effectivefield: ðq��=q�Þ and � appear in different combinations in r.h.s. of(5.69), so the baroclinic ratio ðq��=q�Þ must be computed from the‘‘stiffened’’ density field separately from bulk compressibility effectaccounted by �. This confirms the assumption made in Section 3.2that the slowdown of barotropic wave speed due to vertical strat-ification (3.20) can be correctly estimated by the barotropic modein a Boussinesq model as long as �q and q⁄ in (3.19) are ‘‘stiffened’’.Conversely, using non-stiffened version of them does not yield thecorrect estimate of influence of compressibility (3.21), not thecombination of both effects, resulting in overall incorrect barotrop-ic phase speed.
The case with � � 0 while keeping q��=q� – 1 corresponds to‘‘stiffened’’ non-Boussinesq model. In this case the modificationof pressure gradient terms relatively to uniform-density shallow-water equations is controlled entirely by the ratio q��=q�. This iscomparable to splitting algorithm of Higdon and de Szoeke(1997), Hallberg (1997), which is also non-Boussinesq, howeverassuming that all variations of density are solely due to stratifica-tion. In terms of complexity and computational cost (while main-taining the same level of mode-splitting errors) this is verysimilar to the Boussinesq version (5.53): dm and df can be easily re-lated in fast time as dm ¼ �qdf, where �q does not change in fasttime. This, in principle, makes it possible to express everything di-rectly in the original rather than incremental variables.
Clearly, most of the complexity of (5.69) relative to its Bous-sinesq counterpart is associated with the bulk compressibility �-terms: because of EOS pressure dependency and, correspondingly,the feedback of the state of free-surface f into density distribution,f can be accurately computed from bottom pressure pb only byusing full 3D algorithm. Since f is needed to compute barotropic-pressure gradient term, a simplified algorithm is needed to expressit using 2D variables only during the fast-time stepping. Thisnecessitates approximations which may admit splitting errors.Using incremental variables offers relief: now f is computed usingfull 3D algorithm, but only once per baroclinic time step (at thebeginning of fast-time stepping), while it is increment df whichis computed using a simplified 2D algorithm [essentially via(5.58) leading to (5.63) and ultimately to (5.69)]. This avoidsmode-splitting errors, but brings extra cost associated with theadditional terms in (5.69) recomputed at each fast-time step and,an extra 2D field – � – to be computed once and stored. It is essen-tial that EOS compressibility can be split into the bulk and themuch smaller residual parts – a property of seawater EOS pointedout by Dukowicz (2001).
5.7. Summary for Boussinesq and non-Boussinesq mode splitting
The preceding analysis shows that the existing non-Boussinesqmodels essentially rely on the same assumptions as the Boussinesqmodels, with the relevant smallness parameters estimated as
� ¼ ghc2 -0:025;
D c2� �c2 � 0:04;
fh� 2� 10�4 � � �0:2; q�0
q�0� 0:005 � � �0:01; ð5:71Þ
where the extreme parameter values typically do not occur simul-taneously which limits the algorithmic error estimates that containtheir products. We have assumed a range of values of c = 1480–1540 since most of this variation is purely due to pressure effect,and therefore can be ‘‘absorbed’’ into r if a nonlinear function ofpressure/depth is used. The assumed range of depths varies frommid-ocean to the inner continental shelf. The estimate for q�0=q�0(cf., Fig. 1) is significantly smaller than typical values of q0/q0 dueto stiffening.
The mode-splitting error of the Boussinesq ROMS is estimatedas Oððq�0=q�0Þ
2Þ with all other parameters (5.71) being irrelevant(see Section 3.2). The error increases to the first-order Oðq�0=q�0Þif �q and q⁄ in (3.18), (3.19) are replaced with q�0; and an additionalOðgh=c2Þ error is introduced if a non-stiffened, realistic EOS is usedin an ad hoc way.
Non-Boussinesq models must use full dynamic pressure in EOSwhich implies that density (specific volume) within each verticalgrid box (or layer in layered model) depends on the state of freesurface. At this time we are not aware of any reference whereone takes into account the finite compressibility of seawater intothe context of mode-splitting – the density field is usually com-puted using the sate of free surface at the latest available baroclinicstep and kept constant during barotropic time stepping from thatbaroclinic step to the next. This causes mode-splitting errors and,in principle, opens a possibility for the numerical instability eithervia a mechanism similar to one described in Higdon and Bennett(1996), or in our Section 5.2. With some effort, splitting in a non-Boussinesq model can also be made predominantly second-orderaccurate in sense that the error estimate depends on pair-wiseproducts of parameters (5.71). This can be done in both implemen-tations of non-Boussinesq model – the density extrapolation meth-od of Greatbatch et al. (2001) (our Section 5.2, following Eq. (5.33))and if using pressure-based coordinates (Section 5.6). The splittingerror is essentially avoided by including the f ? EOS pressure feed-back into the fast-time stepping. This is facilitated by factoring EOSin a manner used by Dukowicz (2001), even though it was not orig-inally intended for non-Boussinesq modeling. A complete account-ing of all f dependencies within the barotropic mode results in asubstantial increase in complexity, most likely beyond the pointof diminishing return, especially if keeping in mind that a modelwith stiffened EOS already captures all important physical effects(thermobaricity, and also the steric effect – the principal non-Bous-sinesq effect), so re-introduction of bulk compressibility bringsonly minor quantitative changes.
Existing oceanic codes like MOM4p1 use simpler mode-splittingprocedures resulting in stronger reliance on the smallness ofparameters (5.71), e.g., smallness of f relative to total depth andeven to the uppermost grid-box if there is strong stratificationwithin the upper portion of the domain. The later is due to verticalredistribution of density by barotropic motions in the case of ver-tically fixed grid. This can be traced back to the long-standing vi-sion of free-surface pressure as ‘‘pressure on the rigid lid’’, wherethe Poisson equation was considered primarily as a more efficientreplacement for the original stream-function method, and subse-quently, the split-explicit free-surface was motivated more bythe ease of implementation in the era of parallel computing (orlack of efficient parallel elliptic solvers at that time) rather thanby the interest to the physical phenomena associated with the freesurface itself. This view is inherited from the historical de-empha-sis of temporal accuracy for barotropic motions (first-order) andthe practice of rather heavy-handed temporal filtering of them.

62 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
In this case conversion to a non-Boussinesq model with newsources of mode-splitting error does not usually lead to an instabil-ity because sufficient numerical damping is already present. Sincefine-resolution regional modeling gives more interest in barotropicprocesses (e.g., tides and topographic amplification of tidally-in-duced motions), the accuracy can be restored by using a moretime-scale selective fast-time averaging filter, but this also bringssensitivity to splitting errors. One should note that legacy MOMcode does not formally guarantee discrete finite-volume conserva-tion property for tracers, even in their simpler Boussinesq versions(Griffies et al., 2001; Griffies, 2004), and therefore have somewhatless to lose when converting to non-Boussinesq in a simple way(Greatbatch et al., 2001). This situation has been improved withconversion to pressure-based coordinates (with relative ease forz-coordinate model, somewhat more difficult for sigma), but thisalso commits the model to use hydrostatic approximation andthere is no obvious way to overcome this limitation. When consid-ering barotropic mode splitting, the vertical coordinate ‘‘integratesout’’ exposing essentially the original dilemma – density (specificvolume) depends on the state of free surface via EOS pressure –which must be dealt with during fast-time stepping or accept addi-tional mode-splitting errors. For hydrostatic models it is still sim-pler to make a Boussinesq code more self-consistent in itsdiscretized properties than a non-Boussinesq one. Conversely, amore general, nonhydrostatic, non-Boussinesq code for flows withlow Mach number (e.g., Gatti-Bono and Colella, 2006) would bemore computationally expensive, hence less competitive for realis-tic, large-scale oceanic simulations.
Another class of hydrostatic oceanic models uses an isopycnicvertical coordinate. As in the case of pressure-based coordinates,these models also avoid the density extrapolation (5.13) by thespecific design of their coordinate due to Lagrangian or predomi-nantly Lagrangian movement in the vertical direction. The use ofthe Montgomery potential in the horizontal pressure-gradientforce makes it natural to have a non-Boussinesq formulation. Orig-inally these models were derived using the assumption of incom-pressible EOS and Lagrangianly conserved (potential) density(Bleck and Boudra, 1981; Bleck and Smith, 1990). When the ther-mobaric effect was included later by Sun et al. (1999), it introducedEOS stiffening for the first time. This also leads to the necessity ofusing ‘‘thermobaric references’’ to avoid pressure gradient errors ofan essentially sigma-type (despite using isopycnic coordinates (!)),resulting in a mechanism for numerical instability and a delicatetreatment (Hallberg, 2005). [This approach (along with this partic-ular reason for stiffening) may become obsolete after a recentalternative proposed by Adcroft et al. (2008).] In addition to theabove, the mode-slitting algorithm of Higdon and de Szoeke(1997), Hallberg (1997), still used today, was derived assumingincompressible EOS. For these reasons, and because of their prac-tices these models can be classified as ‘‘stiffened’’ non-Boussinesqmodels.
6. Summary
The desire for a physically correct representation of EOS effects(e.g., thermobaricity) in oceanic modeling requires the use of thenonlinear, realistic seawater EOS. It is often implanted in an‘‘add-on’’ fashion into a Boussinesq-approximation code. Thisbrings a set of internal inconsistencies with spurious effects (e.g.,vertical dependency of acceleration created by a purely barotropicpressure gradient) and interference with barotropic–baroclinicmode-splitting, including potential numerical instability. This pa-per shows in Sections 2–4 how a combined approach of Dukowicz(2001) and SM2003 leads to an accurate Boussinesq model with acomputationally-practical form of stiffened EOS in the specific con-
text of r-coordinate modeling. In essence, it comes from the real-ization that the bulk of the seawater compressibility effect isdynamically passive and can be separated in the EOS from thedynamically relevant parts. Then the constant Boussinesq refer-ence density q�0 is much closer to the varying q� = q�(H,S,P) com-pared to simply replacing q ? q0 in the standard Boussinesqapproximation. This significantly reduces the Boussinesq errorswhile retaining all the necessary physical effects outlined in Sec-tion 3. The output of the EOS routine is not the in situ density orits anomaly, but q01 ¼ q01ðH; SÞ and q01 ¼ q01ðH; SÞ. The former oneessentially retains its original meaning derived from Jackett andMcDougall (1995)), while the latter is now defined by (4.6). Thefunctional form of EOS is modified to include the cz2 term in(4.7), which causes a corresponding change in the algorithm foradiabatic differencing (4.8) and a minor revision of the pressure-gradient algorithm.
The limitations of the Boussinesq approximation are widely dis-cussed in the literature, and sometimes its complete abandonmentis advocated. In Section 5 we show that doing so leads to a morecomplicated code: the mode-splitting procedure interferes withthe density computation via EOS since EOS pressure depends onthe state of free-surface field, and consequently EOS can be nolonger considered as belonging entirely to the slow mode, resultingin a more complicated splitting algorithm to avoid additional split-ting errors and/or extra temporal filtering for the barotropic modeto control numerical instability. This computational aspect of EOScompressibility is usually overlooked in theoretical studies.Remarkably, though originally intended for a Boussinesq code,the factoring of EOS as q ¼ rðPÞ � q�EOSðH; S; PÞ by Dukowicz (2001)provides a useful framework for designing accurate mode-splittingin a hydrostatic, non-Boussinesq, free-surface model that retainsall the compressibility effects in EOS. Removing the bulk compress-ibility from EOS, but keeping thermobaric part of it (i.e., stiffening)eliminates the need for splitting EOS pressure into fast and slowcomponents, thus simplifying the algorithm, however departurefrom the fully realistic EOS also means that the model can no long-er be considered as a fully non-Boussinesq. Notably, among theexisting non-Boussinesq models, modern isopycnic-coordinatemodels always use stiffened EOS (Sun et al., 1999; Hallberg,2005). This allows retention of the principal non-Boussinesq ef-fects, notably steric sea-level changes.
Post facto we note a hierarchy of four approximations, all ofwhich are in practical use in hydrostatic oceanic modeling today.They differ only by the treatment of compressibility effects inEOS: full non-Boussinesq ? non-Boussinesq with stiffenedEOS ? Boussinesq with stiffened EOS ? standard Boussinesq (q0
in combination with full EOS). We recommend that the last ofthese be discontinued; i.e., if the Boussinesq approximation is cho-sen, it should be applied uniformly to the entire code, includingEOS. This means stiffening.
Acknowledgments
This research is supported by the Office of Naval Researchthrough Grants N00014-05-10293 and N00014-08-10597.
Appendix A. Alternative variants of Boussinesq approximationand potential vorticity (PV) equation in a shallow barotropiclayer of compressible fluid
McDougall et al. (2002,) proposed an alternative version ofBoussinesq approximation – their Eqs (27)–(29) – which have ex-actly the same form as the original Boussinesq equations, with theexception that velocity ~u is not the usual velocity, but is the aver-aged normalized mass flux per unit area,

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 63
~u ¼ quq=q0 ¼ qu=q0; where uq ¼ qu=q; ðA:1Þ
see their Eq. (23), where overbar means Reynolds averaging and, forsimplicity, we have changed their notation ~u! ~u. Their motivationcomes from subgrid-scale parameterization. They noticed thatdefining mean velocity as density-weighted average uq instead ofa more conventional Eulerian average u, leads to a more physicallyinterpretable turbulent correlation terms. Following theseguidelines they derived a set of averaged non-Boussinesq equations– their Eqs. (24)–(26) – to which they applied Boussinesq approxi-mation to derive their alternative Boussinesq. MGL2002 argue, andprovide some support for their claim, that their alternative Bous-sinesq equations are more accurate than the standard – notably,the stationary parts of continuity and tracer equations are equiva-lent to their non-Boussinesq counterparts, the geostrophic-balanceis their momentum equations is equivalent to non-Boussinesq (seetheir Section 5). They also use this claim to dismiss the EOSstiffening approach of Dukowicz (2001) as unnecessary, becausetheir alternative Boussinesq equations already eliminate the non-physical shear in a geostrophically-balanced flow without any needfor adjustment in EOS.
Unfortunately the alternative Boussinesq equations of MGL2002also alter the relationship between the advection and Coriolis termsmaking it impossible to derive barotropic PV equation, which ispossible to derive from non-Boussinesq or stiffened Boussinesqsets.
Consider a layer of non-stratified, but slightly compressiblefluid, hydrostatic, non-Boussinesq,
@tuþ u � r?uþw@zuþ f k� u ¼ �ð1=qÞr?p;
@tqþr? � ðquÞ þ @zðqwÞ ¼ 0;@zp ¼ �gq subject to pjz¼f ¼ 0;
q ¼ qEOSðpÞ EOS
ðA:2Þ
along with proper kinematic boundary conditions at free surfacez = f and bottom z = �h, where h = h(x,y) is bottom topography.Above u,w = (u,v,w) is 3D velocity vector, r\ is horizontal (two-dimensional) gradient or divergence operator. As discussed in Sec-tion 2 from (2.1) to (2.4), under these circumstances EOS and hydro-static equations can be solved resulting in self-consistent profilesfor density and pressure, q ¼ ð1=gÞP0ðf� zÞ and p ¼ Pðf� zÞ (whereP0 means derivative of P with respect to its argument f � z), and, asfollows from (2.4), the acceleration due to pressure gradient is sim-ply �gr\f and is independent of z regardless of the functional formof P ¼ Pðf� zÞ. This means that(A.2) admits solutions where hori-zontal velocities are independent of z,
@tuþ u � r?uþ f k� u ¼ gr?f;@tpb þr? � ðpbuÞ ¼ 0;
ðA:3Þ
where pb ¼ gR f�h qdz ¼ Pðfþ hÞ is identified as bottom pressure. It
is assumed to be invertible, hþ f ¼ ½P��1ðpbÞ. The pressure gradientterm r\f can be eliminated by taking horizontal curl of u-equation(A.3),
@t ½r? � u� þ u � r?½r? � u� þ fr? � uþ ½r? � u�r? � u ¼ 0;
ðA:4Þ
or
@tAþ u � r?A þAr? � u ¼ 0; ðA:5Þ
where A is absolute vorticity, A ¼ f þr? � u. On the other hand,pb-equation (A.3) can be dressed up as
@tpb þ u � r?pb þ pbr? � u ¼ 0: ðA:6Þ
Multiplying the A-equation by pb, the latest pb-equation by A, andsubtracting them to cancel the r\ � u-terms,
pb@tAþ pbu � r?A �A@tpb �Au � r?pb ¼ 0 ðA:7Þ
which ultimately leads to PV equation
@t þ u � r?ð Þ f þr? � upb
¼ 0: ðA:8Þ
So the principle dynamics of this compressible, but barotropic fluidis (i) vertical uniformity of u (as a consequence, vertical uniformityof relative vorticity), and (ii) Lagrangian conservation of barotropicPV as stated above. The above derivation can be performed for uni-form (on an f-plane) or non-uniform Coriolis parameter, and in hor-izontal orthogonal curvilinear coordinates as well. The fact thatfluid is compressible adds almost nothing – one can easily repeatthe above with constant-density layer (in this case it does not mat-ter whether it is Boussinesq or non-Boussinesq) the only differenceis replacement pb ? gq0(h + f).
In the case of conventional Boussinesq approximation withpressure-dependent EOS the pressure-gradient term in the firstEq. (A.2) becomes �(1/q0)r\p = �gq/q0r\f, the gq = P0(f � z),which is no longer vertically uniform. This precludes the transitionfrom (A.2) to (A.3) and the subsequent derivation of PV equationsimilar to above. If one considers only the geostrophic balance inBoussinesq version of (A.2), the resultant velocity becomes propor-tional to (q/q0)-profile as well, which is an artifact of Boussinesqapproximation.
Excluding dynamic pressure from EOS equation of (A.2) byreplacing it with q ¼ q0 þ q0EOSð�q0gzÞ eliminates the verticaldependency,
� 1q0r?p ¼ �g
q0 þ q0jz¼f
q0r?f�
gq0
Z f
zr?q0EOSð�q0gzÞ|fflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼0
dz0
� �g 1� g@q0EOS
@p
z¼f
� f !
r?f � �gr? f� gf2
2c2
!; ðA:9Þ
while introducing an insignificant non-physical term due to theartificial assumption that q = q0 at z = 0 instead of free surfacez = f (above c is speed of sound, so the associated smallness param-eter gf/c2 2 � 10�6 assuming c = 1500 m/s and f = 1 m). With thischoice made it is possible to derive an analog of (A.8) while usingBoussinesq approximation. Note that the extra term in (A.9) doesnot preclude elimination of pressure gradient term when takingcurl of (A.3).
EOS stiffening by Dukowicz (2001) (in this case trivially revert-ing EOS in (A.2) to constant density, q = q0, making it insensitive tothe choice of which pressure is used in EOS), also eliminates thevertical dependency in �(1/q0)r\p, allowing derivation of baro-tropic PV Eq. (A.8).
If the alternative Boussinesq system is used – the hydrostaticversion of Eqs. (27)–(29) from MGL2002 in combination withEOS using in situ pressure, q = qEOS(p) as in (A.2) – then it is notthe ordinary velocity, but the density-scaled velocity ~u becomesproportional to (q/q0), which means that unscaled velocity is ver-tically uniform as it should. However, despite the correct geo-strophic balance, the modified Boussinesq set of MGL2002 alsodoes not produce a counterpart of (A.8). Inspection of the deriva-tion above shows that there must be proper scaling relationshipsamong all three terms: Coriolis, pressure-gradient, and advection.In the original Boussinesq the scaling between Coriolis and advec-tion is correct, but pressure gradient receives non-physical verti-cally-dependent multiplier. In the modified case, rescaling ofvelocity by q/q0 corrects the relationship between Coriolis andpressure gradient, but at the expense of sacrificing the relationshipbetween Coriolis and advection – it is ‘‘unscaled’’, rather than den-sity-weighted (hence vertically-dependent) vorticity should becombined with f in order to form absolute vorticity, and then PV.

64 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
Conversely, the alternative non-Boussinesq set–Eqs. (24)–(26)from MGL2002–contains the reverse density multiplier q0/q inthe nonlinear terms, which makes it possible to derive the PVequation above merely because the alternative set can be trans-formed back into the original non-Boussinesq written in terms ofthe non-scaled u.
In contrast, stiffening of EOS by Dukowicz (2001) repairs therelationship between pressure gradient and Coriolis terms withoutdisturbing the already correct mutual relationship between Corio-lis and advection.
Appendix B. Surface gravity waves in a compressible barotropicshallow-water layer
B.1. Non-Boussinesq case
Eq. (2.1)–(2.4) from Section 2 show that the horizontal acceler-ation generated by a free-surface gradient does not depend on thevertical coordinate when vertical variation of density is due only tocompressibility and there is hydrostatic balance,
@tuþ � � � ¼ �gr?f: ðB:1Þ
This makes it possible to consider motions where u is vertically uni-form. In this case (B.1) integrates vertically in a trivial manner, andtogether with vertically integrated mass-conservation equation ityields,
@tð�qD�uÞ þ � � � ¼ �g�qDr?f@tð�qDÞ þ r? � ð�qD�uÞ ¼ 0; ðB:2Þ
where
�u ¼ 1�qD
Z f
�hqudz ¼ 1
D
Z f
�hudz ¼ u;
�q ¼ 1D
Z f
�hqdz; and D ¼ hþ f: ðB:3Þ
Note that the difference between its density-weighted and volumeaveraged �u disappears because of vertical uniformity of u. Solutionof (B.2) implies that the prognostic variable �qD (to be interpretedhere as a whole symbol having the meaning of total weight of watercolumn) needs to be translated into f in order to close the system.This is done through EOS. For simplicity we assume that EOS hasthe form of (2.7), viz., q = q1 + P/c2 with q1 and c constant. Com-bined with hydrostatic balance, this leads to the vertical profileq = q1 exp{g(f � z)/c2}, which results in
�q ¼ q1 �egðfþhÞ=c2 � 1gðfþ hÞ=c2 ¼ q1 �
egD=c2 � 1gD=c2 ; hence �qD ¼ q1
egD=c2 � 1g=c2 :
ðB:4Þ
This depends on f through D.Now we consider small motions in a compressible fluid layer
over a flat bottom. Substituting expression for �qD from (B.4) intothe second equation (B.2) with h = const yields
q1egD=c2 � @tfþ �u � r?ff g þ q1egD=c2 � 1
g=c2 r? � �u ¼ 0; ðB:5Þ
or@tfþ �u � r?fþ ð�q=qbÞDr? � �u ¼ 0; ðB:6Þ
where we identify qb ¼ q1egD=c2 as the value of the density near thebottom. To derive (B.6) we have used the EOS for the purpose ofspecific volume, i.e., to express f from mass content �qD. This situa-tion is common for non-Boussinesq models, and it reverses the roleof EOS in a Boussinesq-approximation model. Linearization of (B.1)and (B.6) yields the system,
@t �u ¼ �gr?f and @tf ¼ �ð�q=qbÞhr? � �u; ðB:7Þ
which admits wave solutions with phase speed
~c ¼ffiffiffiffiffiffiffiffiffiffiffiffigh
�qqb
s¼ c �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� e�gh=c2
p %ffiffiffiffiffiffigh
p; gh=c2 � 1
& c; gh=c2 1:ðB:8Þ
(Since gh�q ¼ Pb can be identified as bottom pressure, this resultcoincides with Eq. (29) in Dukowicz (2006) for a non-stratified case,i.e., by there setting N2 = 0.) For typical oceanic conditions ofh = 5500 m, speed of sound c = 1500 m/s, and acceleration of gravityg = 9.81 m/s2, we estimate � = gh/c2 = 0.025� 1. This means thatthe inclusion of the compressibility effect leads to a slightly smaller(0.6%) phase speed than that of a layer of the same thickness filledby an incompressible fluid,
~c ¼ffiffiffiffiffiffigh
p�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� e��
�
r¼
ffiffiffiffiffiffigh
p1� �
4þ � � �
� �; �� 1: ðB:9Þ
The physical explanation for the reduced phase speed comes fromthe fact change in �qD caused by divergence of vertically-integratedfluxes results in a lesser, by a factor of � 1 � �/2, change in f than inthe case of incompressible fluid, while the remaining �/2 fraction of�qD translates into change in density �q, which does not contribute toacceleration due to pressure gradient in (B.7).
Eq. (B.8) indicates that the gravity-wave phase speed cannot belarger than the speed of sound. The opposite asymptotic limit, gh/c2 1, has meaning as well, ~c ! c. This corresponds to a lowest-vertical-mode wave of compression in an isotropic atmosphere,which does not have a well-defined free surface; rather its densitydecreases with height, so that the e-folding scale c2/g plays the roleof its effective thickness. The hydrostatic approximation alone ex-cludes acoustic waves without making an assumption of incom-pressibility or small density variation; in fact, acoustic andgravity waves become indistinguishable in the hydrostatic case.
B.2. Boussinesq case with q = qEOS(P)
As follows from (2.5), the Boussinesq counterpart of (B.1) withpressure-dependent EOS q = q1 + P/c2 is
@tuþ � � � ¼ �ðg=q0Þ � q1egðf�zÞ=c2 � r?f; ðB:10Þ
where u can no longer be vertically uniform. However it is still pos-sible to derive an analog of (B.7) by substituting u ¼ ~u � egðf�zÞ=c2 ,hence
egðf�zÞ=c2 � @t ~uþ ~u � g=c2� �� egðf�zÞ=c2 � @tfþ � � �
¼ � g=q0ð Þ � q1egðf�zÞ=c2 � r?f; ðB:11Þ
or
@t ~uþ ~u g=c2� �@tfþ � � � ¼ �g q1=q0ð Þ � r?f; ðB:12Þ
which admits solutions with ~u independent of z as long as the non-linear terms (denoted as dots) are vanishingly small. Equation forfree surface becomes
@tf ¼ �r? �Z f
�h
~uegðf�z0 Þ=c2dz0 ¼ �r? � ~u
egD=c2 � 1g=c2
!ðB:13Þ
Linearization of (B.12) and (B.13) assuming h = const, yields
@t ~u ¼ �gðq1=q0Þ � r?f and @tfþ h e� � 1ð Þ=�½ �r? � ~u; ðB:14Þ
where, once again, � = gh/c2. The resultant phase speed of barotropicwaves is
~c ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffighðq1=q0Þ � ðe� � 1Þ=�
qðB:15Þ
where it is worth to note, cf., (B.4), that q1ðe� � 1Þ=� ¼ �q, hence~c ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffigh � �q=q0
p. The choice of Boussinesq reference density q0 ¼ �q

22 Because later in this appendix we will consider the case of compressible fluidwith a finite speed of sound, to avoid potential conflict in notation, we denote thephase speed of gravity waves as ~c or c, using ~c for both modes, if they appear together,or for barotropic, if separately, while c is used for baroclinic only if it appearsseparately. Plain c (without any symbol on top) is reserved for speed of sound.
A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 65
makes ~c ¼ffiffiffiffiffiffigh
p, however it should be noted that in the case of non-
uniform topography this choice cannot be made universal because�q depends on h. The effect of slowdown of barotropic waves bycompressibility is lost.
B.3. Boussinesq with reference pressure in EOS
Everything is the same as in the previous case, except that EOSpressure is computed assuming f � 0, and is not allowed to changewith f. Then q = q1 exp{ � gz/c2}, so the counterpart of (B.1)becomes
@tuþ � � � ¼ �1q0r?
Z f
zgq1e�gz0=c2
dz0
¼ � gq0
qz¼f
r?f�gq0
Z f
zr? q1e�gz0=c2� �
|fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl}¼0
dz0 ðB:16Þ
or @tuþ � � � ¼ � gq1q0
e�gf=c2r?f � � gq1q0r?f which permits solutions
with vertically uniform u, and we note that �gf/c2 5 � 10�6
assuming c = 1500 m/s. The analog of the linearized system (B.7)becomes
@tu ¼ �g q1=q0ð Þ � r?f and @tf ¼ �hr? � u: ðB:17Þ
which yields phase speed
~c ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffigh � q1=q0
q: ðB:18Þ
For the choice of q0 ¼ �q ¼ q1ðe� � 1Þ=� � q1ð1þ �=2Þ, where � = gh/c2� 1, the above turns into ~c �
ffiffiffiffiffiffigh
p� ð1� �=4Þ, which is similar to
(B.9). This result is merely a coincidence: the Boussinesq system(B.17) does not provide a proper physical mechanism for phasespeed reduction due to compressibility effects (note that in compar-ison with (B.7) the density multiplier appears in front of pressuregradient term, rather than in free-surface equation). This result alsosuggests that using the near-surface value of density to computepressure gradient term in barotropic mode is an optimal choicefor a simple mode-splitting algorithm (simple means that it doesnot take into account the influence of stratification onto barotropicphase speed) in a Boussinesq model with reference EOS pressure cf.,Griffies (2004, see Sections 12.3–12.4 there), Griffies (2009, see Sec-tion 7.7.3, Eq. (7.129)).
Appendix C. Surface gravity waves in a stratified two-layer fluid
C.1. Incompressible case
The simplest system with both barotropic and baroclinic modesis a two-layer model. It is also the simplest way to illustrate theinfluence of stratification on the phase speed of surface gravitywaves. For small oscillations around the resting state, the two-layer model has a set linear equations:
@tu1 ¼ �g � rxf; @tðf� gÞ þ H1 � rxu1 ¼ 0;
@tu2 ¼ �gq1
q2� rxf� g 1� q1
q2
� �� rxg; @tgþ H2 � rxu2 ¼ 0;
ðC:1Þ
where uk, qk, and Hk are velocities, densities, and unperturbed thick-nesses of the top (k = 1) and the bottom (k = 2) layers; f is free-surface elevation; g is interface elevation (both are relative to theirunperturbed states, z = 0 and z = �H1). This system assumes hydro-static balance for an incompressible fluid, but it does not use theBoussinesq approximation.
Fourier analysis: Let ðu1; f;u2;gÞ ¼ ðu1; f; u2; gÞ � ekx�ixt , then (C.1)becomes
� ix � u1 ¼ �ik � gf; �ix � fþ ix � g ¼ �ik �H1u1;
� ix � u2 ¼ �ik � g �q1
q2� f� ik � g 1�q1
q2
� �� g; �ix � g ¼ �ik �H2u2:
ðC:2Þ
The right pair of equations can be used to exclude u1 and u2 fromthe left pair:
ð~c2 � gH1Þf ¼ ~c2g;
~c2 � gH2q2 � q1
q2
� �g ¼ gH2
q1
q2f;
ðC:3Þ
where we have introduced ~c ¼ x=k which is identified as phasespeed for the vertical modes, external or internal.22 This has non-trivial solutions if
ð~c2 � gH1Þ � ~c2 � gH2q2 � q1
q2
� �¼ ~c2gH2
q1
q2: ðC:4Þ
It can be rewritten as
~c4 � ~c2~c20 þ ~c2
0 c21 ¼ 0; ðC:5Þ
where
~c20 ¼ g H1 þ H2ð Þ and c2
1 ¼ gH1H2
H1 þ H2� q2 � q1
q2: ðC:6Þ
Eq. (C.5) has two solutions,
~c2 ¼
~c20
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~c4
0
4� ~c2
0c21
r¼
~c20
2
~c20
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 4c2
1=~c20
q�
~c20
2
~c20
2� c2
1; as long as c21 � ~c2
0; ðC:7Þ
where ~c2þ ¼ ~c2
0 � c21 is associated with the barotropic mode, and
~c2� ¼ c2
1 with the baroclinic. This indicates that the presence of strat-ification reduces the square of phase speed of the barotropic moderelative to that of a constant-density layer of the same thickness,H1 + H2, by the square of the baroclinic phase speed. This conclusionis true even beyond the assumption of a small density difference,q2 � q1� q2: (C.5) has the property that the sum of its two rootsis always ~c2
0.Structure of the barotropic mode: f and g are moving in
proportion,
gf¼ 1� gH1
c2 ¼H2 � H1H2
H1þH2� q2�q1
q2
H1 þ H2 � H1H2H1þH2
� q2�q1q2
� H2
H1 þ H21� H2
1
ðH1 þ H2Þ21� q1
q2
� �" #; ðC:8Þ
which is slightly smaller than the fraction of the distance from thebottom to the interface between the two layers relative to the totaldepth. Correspondingly,
u2
u1¼ 1� c2
1
gH2� 1� H1
H1 þ H21� q1
q2
� �; ðC:9Þ
indicating that the bottom layer moves slower than the top.Direct splitting: Eqs. (C.8) and (C.9) indicate that neither the vol-
ume-nor density-weighted vertically averaged velocity,
�u ¼ H1u1 þ H2u2
H1 þ H2or �u ¼ q1H1u1 þ q2H2u2
q1H1 þ q2H2; ðC:10Þ

66 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
can be identified as a depth-independent barotropic flow. However,the proportionality property of perturbations, g vs. f and u2 vs. u1,provides a path for splitting (C.1) into independent barotropic andbaroclinic subsystems. To do this multiply the upper-left Eq. (C.1)by H1 and the lower-left by bH2 and combine the layers; similarly,multiply the lower-right by b and combine it with the upper-right:
@t H1u1 þ bH2u2ð Þ ¼ �rx g H1 þ bH2q1
q2
� �fþ bgH2
q2 � q1
q1g
�;
@t½fþ ðb� 1Þg� ¼ �rx H1u1 þ bH2u2ð Þ;ðC:11Þ
where b is yet to be determined. Note that u1 and u2 already appearin identical combinations under @t and rx in the first and the sec-ond equations, and the goal is to achieve the same for f and g. Thisleads to the proportionality condition,
g H1 þ bH2q1q2
� �1
¼bgH2
q2�q1q1
b� 1; ðC:12Þ
and the selection of b as a root of the quadratic equationb2 � q2
q11� H1
H2
� �b� q2
q1� H1
H2¼ 0 or,
b ¼ 12� q2
q11� H1
H2 1þ H1
H2
� �2
� 4H1
H2� 1� q1
q2
� �" #1=28<:
9=;: ðC:13Þ
Assuming that 1 � q1/q2� 1, this leads to
bþ ¼ 1þ H2
H1 þ H2
q2
q1� 1
� �and
b� ¼ �H1
H2� 1� H2
H1 þ H2
q2
q1� 1
� � �; ðC:14Þ
which corresponds to the barotropic and baroclinic modes respec-tively. Once b is known, (C.11) can be turned into two independentsystems (choosing either + or � sign index below),
@tU ¼ �~c2 rxf ;
@tf ¼ �grxU ;where
f ¼ fþ ðb � 1Þg;U ¼ H1u1 þ b H2u2ðq1=q2Þ;~c2 ¼ g½H1 þ b H2ðq1=q2Þ�:
8><>:ðC:15Þ
It can be shown that the phase speeds ~c2 for each mode are the
same as (C.7) for b = b±, respectively. One can also verify that (C.8)and (C.9) can be obtained from the conditions,
fþ ðb� � 1Þg ¼ 0 and H1u1 þ b� � H2u2 q1=q2ð Þ ¼ 0; ðC:16Þ
that have the meaning of non-excitation of baroclinic degrees offreedom by purely barotropic motions. Since
1 < bþ < q2=q1; ðC:17Þ
the weighting of u1 and u2 for the barotropic mode is within thebounds of set by (C.10). It leans toward q2/q1 when the top layeris shallow relative to the bottom layer, H1� H2.
C.2. Compressible two-layer non-Boussinesq case
Consider a two-layer fluid with densities in the upper and lowerlayers dependent on pressure,
q ¼ q1 � P=c21 and q ¼ q2 � P=c2
2; ðC:18Þ
with q1 – q2 due to stratification and speeds of sound c1 – c2 tosimulate the dependencies on temperature, salinity, and pressure.
Using the hydrostatic balance the above leads to self-consistentprofiles of density and pressure in the top, �H1 + g < z < f, and bot-tom, �H1 � H2 < z < �H1 + g, layers:
q ¼q1egðf�zÞ=c2
1 ;
q2 þ P1=c22
� �egðg�H1�zÞ=c2
2 ;
8<:P ¼
q1c21 egðf�zÞ=c2
1 � 1h i
top;
P1 þ P1 þ q2c22
� �egðg�H1�zÞ=c2
2 � 1h i
bottom;
8><>:ðC:19Þ
where P1 ¼ q1c21½egðf�gþH1Þ=c2
1 � 1� is pressure at the interface be-tween the layers, z = �H1 + g. Eq. (C.19) yields continuity of pres-sure P across the interface. Similar to (2.4), the acceleration due toPGF (�1/q)rxP is independent of the vertical coordinate withineach layer and equal to
� 1qrxP ¼ �grxf and
� 1qrxP ¼ � q1g rxf�rxgð Þegðf�gþH1Þ=c2
1
q2 þ q1 c21=c2
2
� �egðf�gþH1Þ=c2
1 � 1h i� grxg ðC:20Þ
for the top and bottom layer, respectively. This leads to the momen-tum equations,
@tu1 ¼ �grxf;
@tu2 ¼ �grxf� g 1� q1
q2
� �� q1
q2� gH1
c21
� 1� q1c21
q2c22
� � �� ðrxg�rxfÞ;
ðC:21Þ
where we have expanded (C.20) in a Taylor series for gH1=c21 � 1
and retained only the leading-order terms. The equations are linear-ized assuming f, g� H1, H2 and neglecting the advection terms. Asexpected, the second Eq. (C.21) reverts to (C.1) if c1 ?1, while theratio c1/c2 remains finite. Furthermore, the additional terms due tocompressibility vanish if gH1=c2
1 remains finite, but q1c1 = q2c2, indi-cating their baroclinic and thermobaric nature.
The top-layer thickness equation is derived following the pathof transition from (B.2) to (B.6) in Appendix B. This leads to
@tðf� gÞ ¼ �H1 1� 12
gH1
c21
� �rxu1; ðC:22Þ
which is linearized, and only leading-order corrections due to finitecompressibility are retained. The bottom-layer thickness equationstems from mass conservation,
@t �q2ðH2 þ gÞð Þ þ rx �q2ðH2 þ gÞu2ð Þ ¼ 0; ðC:23Þ
or
ð@t þ u2 � rxÞð�q2ðH2 þ gÞÞ þ �q2ðH2 þ gÞrxu2 ¼ 0; ðC:24Þ
where, as follows from (C.19), the vertically averaged density with-in the bottom layer is
�q2 ¼ q2 þP1
c22
� �egðH2þgÞ=c2
2 � 1g=c2
2
: ðC:25Þ
Since the interface pressure P1 depends on the thickness of the toplayer, �q2 depends on it as well. This leads to the participation of f inthe bottom thickness equation. Substitution of the expression for P1
just after (C.19) into (C.25), with subsequent substitution into (C.24)leads to
@tg�q1
q2
gH2
c22
� @tðf� gÞ þ H2 1� 12
gH2
c22
� �rxu2 ¼ 0; ðC:26Þ
where we retain only leading-order compressibility corrections. Theabove reverts to the corresponding equation in (C.1) in the incom-pressible limit, gH2/c2 ? 0.
Eqs. (C.21), (C.22), and (C.26) comprise a closed system that de-scribes small oscillations in a compressible two-layer fluid. Its Fou-rier analysis similar to the transition from (C.1) to (C.2) yields

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 67
� ix � u1 ¼ �ik � gf; �ix � fþ ix � g ¼ �ik � H01u1;
� ix � u2 ¼ �ikg 1� d0ð Þ � f� ikgd0 � g;
� ixð1� �Þ � g� ix� � f ¼ �ik � H02u2;
ðC:27Þ
where we define
d0 ¼ 1� q1
q2
� �� q1
q2� gH1
c21
1� q1c21
q2c22
� �; H01 ¼ H1 1� 1
2gH1
c21
� �;
� ¼ q1
q2� gH2
c22
; H02 ¼ H2 1� 12
gH2
c22
� �;
ðC:28Þ
and expect that d0, � are sufficiently small and H01;H02 deviate only
slightly from H1, H2. This leads to the characteristic equation,
~c4 � g H02 þ H01ð1� �Þ� �
~c2 þ g2d0H01H02 ¼ 0; ðC:29Þ
where ~c ¼ x=k. This essentially repeats (C.5) and (C.6), but with amodified set of coefficients. The resulting phase speeds for the baro-tropic and first baroclinic modes are
~c2þ ¼ g H02 þ H01ð1� �Þ
� �� gd0H01H02
H02 þ H01ð1� �Þc2�
¼ gd0H01H02H02 þ H01ð1� �Þ
; ðC:30Þ
where, similar to (C.7), we keep only leading-order corrections aris-ing from stratification and here compressibility.
When gH1=c21 ! 0 and gH2=c2
2 ! 0, both phase speeds revert totheir incompressible limits in (C.7). On the other hand, for a com-pressible fluid without stratification, q1 = q2, and the speed ofsound is the same in both layers (c1 = c2); hence, the barotropicphase speed from c+ from (C.30) becomes
~c2þ ¼ gðH1 þ H2Þ 1� 1
2� gðH1 þ H2Þ
c2 þ � � � �
; ðC:31Þ
where the dots denote higher-order terms with respect tog(H1 + H2)/c2� 1. This coincides with (B.9) where h = H1 + H2.
In the general case with both stratification and compressibilityeffects, as follows from (C.30), the stratification still causes thereduction of phase speed of the barotropic mode relative to thenon-stratified case in the same manner as in (C.7), i.e., the squareof barotropic phase speed is reduced by the square of the first baro-clinic mode speed. In addition, both are reduced by the compress-ibility (finite speeds of sound), due to the replacement of layerthicknesses H1, H2 with their primed counterparts H01;H
02. The baro-
clinic mode speed is also affected by the second term in d0, whichinvolves the ratio of q1c2
1=q2c22. In principle, this admits the exis-
tence of internal waves even if q1 = q2, but the speed of sound inthe upper layer is greater than in the lower to yield a positived0 > 0. For typical oceanographic conditions we expect the ratio ofphase speeds for the first baroclinic and the barotropic modes tobe within the range of 20–100, which leads to an estimate ofc2�=~c
2þ 10�3. This causes a substantially smaller reduction of the
barotropic wave speed than the influence of bulk compressibility(B.9) and makes stratification less of a concern as the source ofmode-splitting error.
C.3. Boussinesq case
The Boussinesq version of (C.1) is
@tu1 ¼ �g q1=q0ð Þrxf; @tðf� gÞ þ H1 � rxu1 ¼ 0;
@tu2 ¼ �g q1=q0ð Þrxf� gq2 � q1
q0rxg; @tgþ H2 � rxu2 ¼ 0:
ðC:32Þ
So the counterparts of (C.12) and the left side (C.14) become
b2 � q2
q1� H1
H2
� �b� H1
H2¼ 0; bþ
¼ 1þ q2H2
q1H1 þ q2H2
q2
q1� 1
� �: ðC:33Þ
This indicates, once again, that the velocity weighting parameter b+
corresponding to the barotropic mode is neither 1 (volume weight-ing) nor q2/q1 (density weighting).
Appendix D. Surface gravity waves in a stratified shallow-waterlayer
Consider a Boussinesq fluid layer, where, for simplicity, we re-strict our attention to a two-dimensional case in an x–z plane with-out Coriolis force:
@tuþ � � � ¼ �ð1=q0Þ@xP;
@tqþ u@xqþw@zq ¼ 0;@zP ¼ �gq;@xuþ @zw ¼ 0:
ðD:1Þ
We rewrite this with a r-coordinate that follows f:
r ¼ z� fhþ f
% 0; z! f;
& �1; z! �h;
conversely; z ¼ fþ rðhþ fÞ% f; r! 0;& �h; r! �1:
ðD:2Þ
We assume bottom topography is flat, h = const, so that the only dis-tinction between @x—z and @x—r is due to f – 0. Thus,
@P@x
z
¼ @P@x
r� @z@x
r� @P@z¼ @P@x
r� ð1þ rÞ @f
@x� @P@z: ðD:3Þ
Since P ¼ gR f
z qdz ¼ gðhþ fÞR 0r qdr0, we can further transform this
into
@P@x
z
¼ g qð1þ rÞ þZ 0
rqdr0
� � @f@xþ gðhþ fÞ
Z 0
r
@q@x
r
dr0: ðD:4Þ
The density equation in r-coordinates is
@tjrqþ u � @xjrqþ ðW=ðhþ fÞÞ � @rq ¼ 0; ðD:5Þ
where @t—rq is the time tendency relative to the moving r-surface.The vertical velocity in r-coordinates W is related to its Euleriancounterpart as W ¼ w� ð1þ rÞ � ½@f
@t þ u � @f@x�, which automatically
satisfies the no-flux boundary condition Wjr¼0 ¼ 0 at the free sur-face as a consequence of the Eulerian kinematic surface boundarycondition, w = @tf + u@xf. The non-divergent continuity equation is
@tfþ @xjrððhþ fÞuÞ þ @rW ¼ 0; ðD:6Þ
which leads to equations for f,
@tfþ @xððhþ fÞ�uÞ ¼ 0; where �u ¼Z 0
�1udr; ðD:7Þ
and for W
@xjrððhþ fÞðu� �uÞÞ þ @rW ¼ 0: ðD:8Þ
The first equation in (D.1) with its PGF expressed by (D.4), alongwith (D.7), and (D.8), comprise a closed system which describesevolution of a layer of stratified fluid with a free surface. Since weare interested in small oscillations around the mean resting state,f � u � W � 0 and q = q(r), and we linearize the system usingthe variables,
f ¼ f0; u ¼ �uþ u0; W ¼W0; q ¼ qðrÞ þ q0; ðD:9Þ

68 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
where all except q(r) are considered as small perturbations. Notethat splitting of horizontal velocity into �u and u0, such thatR 0�1 u0dr � 0, is a matter of convenience, rather than an assump-
tion that the second (primed) term is smaller than the first. The sys-tem becomes
@
@tð�uþ u0Þ ¼ � g
q0� ð1þ rÞqðrÞ þ
Z 0
rqðr0Þdr0
� � @f
0
@x
� ghq0
Z 0
r
@q0
@x
r
dr0; ðD:10Þ
@f0
@tþ h � @
�u@x¼ 0;
@q0
@tþW
0
h�dqðrÞ
dr¼ 0;
@u0
@x
rþ 1
h� @W
0
@r¼ 0; ðD:11Þ
where the first equation can be split into separate ones for �u, ob-tained by vertical integration of (D.10),
@�u@t¼ � g
q0� @f
0
@x�Z 0
�1ð1þ rÞqðrÞ þ
Z 0
rqðr0Þdr0
� dr
� ghq0
Z 0
�1
Z 0
r
@q0
@x
r
dr0 dr; ðD:12Þ
and for u0, the residual of (D.10) after subtraction of (D.12). With
PðrÞ ¼Z 0
rqðr0Þdr0; ðD:13Þ
integration of the first term inside the left integral in the r.h.s. of(D.12) yieldsZ 0
�1ð1þ rÞqðrÞdr ¼
Z 0
�1ð1þ rÞ �dP
dr
� �dr
¼ �ð1þ rÞPðrÞj0�1|fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl}¼0
þZ 0
�1PðrÞdr: ðD:14Þ
Then the entire (D.12) an be rewritten as
@�u@t¼ � gq�
q0� @f0
@x� gh
q0
Z 0
�1
Z 0
r
@q0
@x
r
dr0 dr; ðD:15Þ
where we have identified
q� ¼ 2Z 0
�1
Z 0
rqðr0Þdr0dr; ðD:16Þ
which coincides with (3.19) from Section 3.2.Let
f0; �u;u0;W0;q0ð Þ ¼ f; �u; u0;cW ; q� �
� eikx�ixt; ðD:17Þ
where the last three, u;cW ; q are functions of r. Substitution into(D.10) leads to
�ik � x2
k2 �ghq0ð1þ rÞqðrÞ þ
Z 0
rqðs0Þdr0
�� f
¼ �xk� @cW@r� k
x� ghq0
Z 0
r
cW � dqðr0Þdr
dr0; ðD:18Þ
where we have eliminated all variables except f and cW using a Fou-rier-transform of (D.11), viz.,
�u ¼ xk� fh; q0 ¼ 1
ix�cWh�dqðrÞ
dr; and u0 ¼ � 1
ikh� @cW@r
: ðD:19Þ
Eq. (D.18) comprises a Sturm–Liouville problem with unknownsx (playing the role of an eigenvalue), f (an arbitrary non-trivialFourier amplitude), and cW ¼ cWðrÞ (a vertical profile multipliedby an arbitrary non-zero constant). The profile is subject to a pairof boundary conditions,cWjr¼0 ¼ 0 and cWjr¼�1 ¼ 0. A property of
(D.18) is that for q(r) = const, the only possible non-trivial solutionis f – 0, as allowed by x2 = k2�gh � q/q0, and cW � 0. This corre-sponds to familiar barotropic gravity waves. It also makes q0 = qthe natural choice for the Boussinesq reference density, resultingin a correct phase speed x=k ¼
ffiffiffiffiffiffigh
p. Conversely, assuming f � 0
but dq(r)/dr < 0 results in a Sturm–Liouville problem for cW alone,which leads to a set of baroclinic modes.
In the general case a dilemma is that the expression inside{.[. . .]} in l.h.s. of (D.18) depends on r, while f does not. To resolvethis, as in the case of (D.15), vertical integration of (D.18) yields
�ik � x2
k2 � ghq�q0
� f ¼ � k
x� ghq0
Z 0
�1
Z 0
r
cW � dqðr0Þdr
dr0dr; ðD:20Þ
where the expression inside {. . .} no longer depends on s. Settingx=k ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffigh � q�=q0
pallows for a non-trivial f, provided that cW ¼ 0,
however, substitution of this x/k back into (D.18) results there innon-vanishing expression {.[. . .]} and ultimately leads to a nontriv-ial profile of cW ¼ cWðrÞ, which is proportional, and in fact, is drivenby f.
This dilemma has two consequences. First, it suggests an itera-tive method for finding x/k for the barotropic mode: usex2 = k2 � gh � q⁄/q0 as the initial guess and substitute it into
ik � ghq0� r �
dqðrÞdr
� f ¼ �xk� @
2cW@r2 þ
kx� ghq0�cW � dqðrÞ
dr; ðD:21Þ
which is the vertical derivative of (D.18). Then the l.h.s. of (D.21)can be treated as known. This leads to a problem for cW alone. Thisproblem is well posed, because this value of x/k is far away fromthe eigenvalues of the operator in the r.h.s. of (D.21) (i.e., its eigen-values are associated with internal modes and have much lower fre-quencies). The solution results in a profile, cW ¼ cWðrÞ, proportionalto f. Substitute it into the r.h.s. of (D.20) and recompute x/k, afterwhich the iterative cycle is repeated. Convergence is guaranteed be-cause (D.21) can be rewritten as
ix�2s � f ¼ @2cW@r2 þ �
2cW ; ðD:22Þ
where �2 ¼ k2
x2 � h2N2 ¼ k2
x2 � gh � ð� 1q0� dqðrÞ
dr Þ is of the same order as thesquare of the ratio of the first-baroclinic and barotropic mode phasespeeds, hence �2� 1. The scaling of cW relative to f is estimated ascW ix�2f, and the scaling of the mismatch between this l.h.s. andr.h.s. of (D.20) is estimated as
ikx2
k2 � ghq�q0
� vs: ix �x
k� �4; ðD:23Þ
which implies that the corrections are indeed sufficiently small.The second consequence is that, even though the system is lin-
ear, it did not split into two independent subsystems: barotropicand baroclinic. This does not mean that the it is not splittable inprinciple, but rather that the actual structure of the barotropicmode cannot be represented by a vertically uniform velocity: ithas a non-constant profile that depends on stratification q(r). Sim-ilarly, the presence of a non-trivial cW slaved to f indicates thanvertical density profile is not ‘‘frozen’’ in r-coordinates in purelybarotropic motions, but it changes following f. This indicates thatthe ideal stretching of the r-coordinate by f should not just be pro-portional to the distance from the bottom,
z ¼ zð0Þ þ f � ðzð0Þ þ hÞ=h; ðD:24Þ
but should depend on the density profile as well to cancel W asso-ciated with barotropic motions, and thus cancel changes of density.This determines the level of error in the mode-splitting algorithm ofSM2005 because the mismatch in (D.20) indicates that the phasespeed of the barotropic mode is different between the 2D and 3Dparts of the code. The 2D part sees it as just x=k ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffigh � q�=q0
p,

A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70 69
and the 3D part sees it as the complete solution of (D.20) and (D.21).This is a mode-splitting error, because there are contributions in thevertically-integrated r.h.s. of the 3D momentum equations that de-pend on f and have a hyperbolic character, yet are frozen during thebarotropic time-stepping, hence are computed using effectively aforward-in-time Euler algorithm.
References
Adcroft, A., Campin, J.-M., 2004. Rescaled height coordinates for accuraterepresentation of free-surface flows in ocean circulation models. OceanModeling 7, 269–284. doi:10.1016/j.ocemod.2003.09.003.
Adcroft, A., Hallberg, R., Harrison, M., 2008. A finite volume discretization of thepressure gradient force using analytic integration. Ocean Modeling 22, 106–113. doi:10.1016/j.ocemod.2008.02.001.
Antonov, J.I., Locarnini, R.A., Boyer, T.P., Mishonov, A.V., Garcia, H.E. 2006. WorldOcean Atlas 2005. Salinity. Levitus, S. (Ed.), vol. 2. NOAA Atlas NESDIS 62, USGovernment Printing Office, Washington, DC, 182 pp.
Berntsen, H., Kowalik, Z., Sælid, S., Sørli, K., 1981. Efficient numerical simulation ofocean hydrodynamics by splitting procedure. Modeling, Identification andControl 2, 181–199.
Bleck, R., Boudra, D.B., 1981. Initial testing of a numerical ocean circulation modelusing a hybrid (quasi-isopycnic) vertical coordinate. Journal of PhysicalOceanography 11, 755–770.
Bleck, R., Smith, L.T., 1990. A wind-driven isopycnic coordinate model of the northand equatorial Atlantic Ocean: 1. Model development and supportingexperiments. Journal of Geophysical Research 95C, 3273–3285.
Blumberg, A.F., Mellor, G.L., 1987. A description of a three-dimensional coastalocean circulation model. In: Heaps, N.S. (Ed.), Three-Dimensional Coastal OceanModels. Pub. AGU, Washington, DC, pp. 1–16.
Boussinesq, J., 1903. Théorie analytique de la chaleur. Tome II. In: Analytic theory ofheat. Vol. 2, Gauthier-Villars, Paris, 625pp. <http://gallica.bnf.fr/ark:/12148/bpt6k61635r>.
Brydon, D., Sun, S., Bleck, R., 1999. A new approximation of the equation of state forseawater, suitable for numerical ocean models. Journal of Geophysical Research104, 1537–1540.
Campin, J.-M., Adcroft, A., Hill, C., Marshall, J., 2004. Conservation of properties in afree-surface model. Ocean Modeling 6, 221–244. doi:10.1016/S1463-5003(03)00009-X.
Casulli, V., Cheng, R.T., 1992. Semi-implicit finite-difference methods for 3-dimensional shallow-water flow. International Journal for Numerical Methodsin Fluids 15, 629–648.
de Szoeke, R.A., Samelson, R.M., 2002. The duality between the Boussinesq and non-Boussinesq hydrostatic equations of motion. Journal of Physical Oceanography32, 2194–2203. doi:10.1175/1520-0485(2002)032<2194:TDBTBA>2.0.CO;2.
Dewar, W.K., Hsueh, Y., McDougall, T.J., Yuan, D.I., 1998. Calculation of pressure inocean simulations. Journal of Physical Oceanography 28, 577–588.
Dukowicz, J.K., 1997. Steric sea level in the Los Alamos POP code – Non-Boussinesqeffects. In: Lin, C., Laprise, R., Ritchie, H. (Eds.), Numerical Methods inAtmospheric and Oceanic Modeling: The Andre Robert Memorial Volume.NRC Research Press, pp. 533–546.
Dukowicz, J.K., 2001. Reduction of density and pressure gradient errors in oceansimulations. Journal of Physical Oceanography 31, 1915–1921.
Dukowicz, J.K., 2006. Structure of the barotropic mode in layered ocean models.Ocean Modeling 11, 49–68. doi:10.1016/j.ocemod.2004.11.005.
Gatti-Bono, C., Colella, P., 2006. An anelastic allspeed projection method forgravitationally stratified flows. Journal of Computational Physics 216, 589–615.doi:10.1016/j.jcp.2005.12.017.
Greatbatch, R.J., 1994. A note on the representation of steric sea level in models thatconserve volume rather than mass. Journal of Geophysical Research 99 (12),76712,77.
Greatbatch, R.J., McDougall, T.J., 2003. The non-Boussinesq temporal residual mean.Journal of Physical Oceanography 33, 1231–1239.
Greatbatch, R.J., Lu, Y., Cai, Y., 2001. Relaxing the Boussinesq approximation inocean circulation models. Journal of Atmospheric and Oceanic Technology 18,1911–1923. doi:10.1175/1520-0426(2001)018<1911:RTBAIO>2.0.CO;2.
Griffies, S.M., 2004. Fundamentals of Ocean Climate Models, vol. 496. PrincetonUniversity Press. 496 pp. ISBN-13#09780691118925.
Griffies, S.M., 2009. Elements of MOM4p1. GFDL Ocean Group Technical Report No.6. NOAA/GFDL, April 21, 2009, 444 pp.
Griffies, S.M., Adcroft, A.J., 2008. Formulating the equations of ocean models. In:Hecht, M.W., Hasumi, H. (Eds.), Ocean Modeling in an Eddying Regime,Geophysical Monograph 177. American Geophysical Union, Washington, DC,pp. 281–318.
Griffies, S.M., Gnanadesikan, A., Pacanowski, R.C., Larichev, V.D., Dukowicz, J.K.,Smith, R.D., 1998. Isoneutral diffusion in a z-coordinate ocean model. Journal ofPhysical Oceanography 28, 805–830.
Griffies, S.M., Pacanowski, R.C., Schmidt, M., Balaji, V., 2001. Tracer conservationwith an explicit free surface method for z-coordinate ocean models. MonthlyWeather Review 5, 1081–1098.
Hallberg, 1997. Stable split time stepping schemes for large-scale ocean modeling.Journal of Computational Physics 135, 54–65.
Hallberg, 2005. A thermobaric instability of Lagrangian vertical coordinate oceanmodels. Ocean Modeling 8, 279–300. doi:10.1016/j.ocemod.2004.01.001.
Higdon, R.L., Bennett, A.F., 1996. Stability analysis of operator splitting for large-scale ocean modelling. Journal of Computational Physics 123, 311–329.
Higdon, R.L., de Szoeke, R.A., 1997. Barotropic–baroclinic time splitting for oceancircullation modeling. Journal of Computational Physics 135, 31–53.
Huang, R.X., Jin, H.Z., 2002. Sea surface elevation and bottom pressure anomaliesdue to thermohaline forcing. Part I: Isolated perturbations. Journal of PhysicalOceanography 32, 2131–2150.
Ingersoll, A.P., 2005. Boussinesq and anelastic approximations revisited: Potentialenergy release during thermobaric instability. Journal of Physical Oceanography35, 1359–1369. doi:10.1175/JPO2756.1.
Jackett, D.R., McDougall, T.J., 1995. Minimal adjustment of hydrostatic profiles toachieve static stability. Journal of Atmospheric and Oceanic Technology 12,381–389.
Jackett, D.R., McDougall, T.J., 1997. A neutral density variable for the world’s oceans.Journal of Physical Oceanography 27, 237–263.
Jackett, D.R., McDougall, T.J., Feistel, R., Wright, D.G., Griffies, S.M., 2006. Algorithmsfor density, potential temperature, conservative temperature, and the freezingtemperature of seawater. Journal of Atmospheric and Oceanic Technology 23,1709–1728.
Kanarska, Y., Shchepetkin, A.F., McWilliams, J.C., 2007. Algorithm for non-hydrostatic dynamics in ROMS. Ocean Modeling 18, 143–174. doi:10.1016/j.ocemod.2007.04.001.
Killworth, P.D., Stainforth, D., Webb, D.J., Paterson, S.M., 1991. The development of afree-surface Bryan–Cox–Semtner ocean model. Journal of PhysicalOceanography 21, 1333–1348.
Locarnini, R.A., Mishonov, A.V., Antonov, J.I., Boyer, T.P., Garcia, H.E., 2006. WorldOcean Atlas 2005. Temperature. Levitus, S. (Ed.), vol. 1, NOAA Atlas NESDIS 61,US Government Printing Office, Washington, DC, 182 pp.
Losch, M., Adcroft, A., Campin, J.-M., 2004. How sensitive are coarse generalcirculation models to fundamental approximations in the equations of motion?Journal of Physical Oceanography 34, 306–319. doi:10.1175/1520-0485(2004)034<0306:HSACGC>2.0.CO;2.
Lu, Y., 2001. Including non-Boussinesq effect in Boussinesq ocean circulationmodels. Journal of Physical Oceanography 31, 1616–1622.
Marshall, J., Adcroft, A., Campin, J.-M., Hill, C., White, A., 2004. Atmosphere-oceanmodeling exploiting fluid isomorphisms. Monthly Weather Review 132, 2882–2894. doi:10.1175/MWR2835.1.
McDougall, T.J., Garrett, C.J.R., 1992. Scalar conservation equations in a turbulentocean. Deep-Sea Research 39, 1953–1966.
McDougall, T.J., Jackett, D.R., 2007. The thinness of the ocean in S �H � p space andthe implications for mean diapycnal advection. Journal of PhysicalOceanography 37, 1714–1732. doi:10.1175/JPO3114.1.
McDougall, T.J., Greatbatch, R.J., Lu, Y., 2002. On conservation equations inoceanography: How accurate are Boussinesq ocean models? Journal ofPhysical Oceanography 32, 1574–1584. doi:10.1175/1520-0485(2002)032<1574:OCEIOH>2.0.CO;2.
McDougall, T.J., Jackett, D.J., Wright, D.G., Feistel, R., 2003. Accurate andcomputationally efficient algorithms for potential temperature and densityand of seawater. Journal of Atmospheric and Oceanic Technology 20, 730–741.
McPhee, M.G., 2000. Marginal thermobaric stability in the ice-covered upper oceanover Maud Rise. Journal of Physical Oceanography 30, 2710–2722. doi:10.1175/1520-0485(2000)030<2710:MTSITI>2.0.CO;2.
Mellor, G.L., 1991. An equation of state for numerical modeling of oceans andestuaries. Journal of Atmospheric and Oceanic Technology 1991, 609–611.
Mellor, G.L., Ezer, 1995. Sea level variations induced by heating and cooling: Anevaluation of the Boussinesq approximation in ocean models. Journal ofGeophysical Research 100, 20557–20565.
Mihaljan, J.M., 1962. A Rigorous exposition of the Boussinesq approximationsapplicable to a thin layer of fluid. Astrophysics Journal 136, 1126–1133.doi:10.1086/147463.
Oberbeck, A., 1879. Ueber die Wärmeleitung der Flssigkeiten bei Bercksichtigungder Strmungen infolge von Temperaturdifferenzen. Annalen der Physik 243,271–292. doi:10.1002/andp.18792430606.
Oberbeck, A., 1888. On the phenomena of motion in the atmosphere (first comm).In: The Mechanics of the Earth’s Atmosphere, Translated by Cleveland Abbe.publ. Smithsonian Inst., Washington, 1891. pp. 176–187. <http://books.google.com/books?id=kGBDAAAAIAAJ>.
Paluszkiewicz, T., Garwood, R.W., Denbo, D.W., 1994. Deep convective plumes in theocean. Oceanography 7, 3744.
Robertson, R., Padman, L., Levine, M.D., 2001. A correction to the baroclinic pressuregradient term in the Princeton ocean model. Journal of Atmospheric andOceanic Technology 18, 1068–1075.
Rueda, F.J., Sanmiguel-Rojas, E., Hodges, B.R., 2007. Baroclinic stability for a familyof two-level, semi-implicit numerical methods for the 3D shallow waterequations. International Journal of Numerical Methods in Fluids 54, 237–268.doi:10.1002/fld.1391.
Shchepetkin, A.F., McWilliams, J.C., 2003. A method for computing horizontalpressure-gradient force in an oceanic model with a non-aligned verticalcoordinate. Journal of Geophysical Research 108, 3090–3124. doi:10.1029/2001JC001047.
Shchepetkin, A.F., McWilliams, J.C., 2005. The regional ocean modeling system: asplit-explicit, free-surface, topography-following-coordinate oceanic model.Ocean Modeling 9, 347–404. doi:10.1016/j.ocemod.2004.08.002.

70 A.F. Shchepetkin, J.C. McWilliams / Ocean Modelling 38 (2011) 41–70
Shchepetkin, A.F., McWilliams, J.C., 2008. Computational kernel algorithms for fine-scale, multi-process, long-term oceanic simulations. In: Ciarlet, P.G. (Ed.),Temam, R., Tribbia, J., (Guest Ed.), Handbook of Numerical Analysis.Computational Methods for the Ocean and the Atmosphere. vol. XIV, ElsevierScience, pp. 119–182. doi:10.1016/S1570-8659(08)01202-0.
Spiegel, E.A., Veronis, G., 1960. On the Boussinesq approximation for a compressiblefluid. Astrophysics Journal 131, 442–447.
Stacey, M.W., Pond, S., Nowak, Z.P., 1995. A numerical model of the circulation inknight inlet, British Columbia, Canada. Journal of Physical Oceanography 25,1037–1062.
Sun, S., Bleck, R., Rooth, C., Dukowicz, J., Chassignet, E., Killworth, P., 1999. Inclusionof thermobaricity in isopycnis-coordinate ocean models. Journal of PhysicalOceanography 29, 2719–2729. doi:10.1175/1520-0485(1999)029<2719:IOTIIC>2.0.CO;2.
Tailleux, R., 2009. On the energetics of stratified turbulent mixing, irreversiblethermodynamics, Boussinesq models and the ocean heat engine controversy.Journal of Fluid Mechanics 638, 339–382. doi:10.1017/S002211200999111X.
Tailleux, R., 2010. Identifying and quantifying nonconservative energy production/destruction terms in hydrostatic Boussinesq primitive equation models. OceanModeling 34, 125–136. doi:10.1016/j.ocemod.2010.05.003.
Wright, D.G., 1997. An equation of state for use in ocean models: Eckart’s formularevisited. Journal of Physical Oceanography 14, 735–741.
Young, W.R., 2010. Dynamic enthalpy, conservative temperature, and the seawaterBoussinesq approximation. Journal of Physical Oceanography 40, 394–400.doi:10.1175/2009JPO4294.1.
Zeytounian, R.Kh., 2003. Joseph Boussinesq and his approximation: a contemporalview. Comptes Rendus Mecanique 331, 575–586. doi:10.1016/S1631-0721(03)00120-7.









![Water Mass Transformation by Cabbeling and Thermobaricitythat cabbeling is essential for the formation of Antarctic Intermediate Water (AAIW), and Thomas and Shakespeare [2015] used](https://img.pdfslide.us/doc/110x75/5eca8dca33be3d38d95046ff/water-mass-transformation-by-cabbeling-and-thermobaricity-that-cabbeling-is-essential.jpg)







![Submesoscale processes promote seasonal restratification ...klinck/Reprints/PDF/duplessisJGR2017.pdfSwart et al. [2015] also reveal that spring restratification is concurrent with](https://img.pdfslide.us/doc/110x75/60099b7a243f3a66447cd3de/submesoscale-processes-promote-seasonal-restratification-klinckreprintspdf.jpg)