Embed Size (px)
Citation preview
HAL Id: hal-01769820https://hal.archives-ouvertes.fr/hal-01769820
Preprint submitted on 18 Apr 2018
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Accuracy on the Time-of-Flight Estimation forUltrasonic Waves Applied to Non-DestructiveEvaluation of Standing Trees: A Comparative
Experimental StudyLuis Espinosa, Jan Bacca, Flavio Prieto, Philippe Lasaygues, Loïc Brancheriau
To cite this version:Luis Espinosa, Jan Bacca, Flavio Prieto, Philippe Lasaygues, Loïc Brancheriau. Accuracy on theTime-of-Flight Estimation for Ultrasonic Waves Applied to Non-Destructive Evaluation of StandingTrees: A Comparative Experimental Study. 2018. �hal-01769820�

Accuracy on the Time-of-Flight Estimation for Ultrasonic Waves
Applied to Non-Destructive Evaluation of Standing Trees: A
Comparative Experimental Study
Luis Espinosa1,2), Jan Bacca3), Flavio Prieto1), Philippe Lasaygues4), Loıc Brancheriau2)
1) Dept. of Mechanical and Mechatronics Engineering, Universidad Nacional de ColombiaCarrera 45 No. 26-85, Bogota, Colombia. [email protected]
2) Research Unit BioWooEB, Univ Montpellier, CIRADTA B114/16, 73 Rue J.F. Breton, Montpellier, France
3) Dept. of Electrical and Electronics Engineering, Universidad Nacional de ColombiaCarrera 45 No. 26-85, Bogota, Colombia
4) Aix Marseille Univ, CNRS, Centrale Marseille, LMA, 4, Impasse Nikola TESLACS 40006, Marseille, France.
Summary1
Time-of-flight measurement is a critical step to per-2
form ultrasonic non-destructive testing of standing3
trees, with direct influence on the precision of de-4
fect detection. Aiming to increase the accuracy on5
the estimation, the characteristics of the ultrasonic6
measurement chain should be adapted to the con-7
straints of wood testing in living condition. This8
study focused on the excitation signal parameters,9
such as shape, temporal duration, and frequency re-10
sponse, and then the selection of a suitable time-11
of-flight determination technique. A standing plane12
tree was tested, placing ultrasonic receivers at four13
different positions, with five different excitation sig-14
nals and three time-of-flight detection methods. The15
proposed ultrasonic chain of measurement resulted in16
high signal-to-noise ratios in received signals for all17
configurations. A time-frequency analysis was used18
to determine the power distribution in the frequency19
domain, showing that only chirp signal could concen-20
trate the power around the resonant frequency of the21
sensor. Threshold and Akaike information criterion22
method performed similar for impulsive signals with23
decreasing uncertainty as sensor position approached24
to the radial direction. Those two methods failed to25
accurate determine time-of-flight for Gaussian pulse26
and chirp signals. Cross-correlation was only suitable27
for the chirp signal, presenting the lower uncertainty28
values among all configurations.29
1 Introduction30
Modern techniques can be used to minimize the risk31
associated with tree failure. Significant advances in32
this field include decay detection equipments, formu-33
las and guidelines for assessing hazardous trees [1, 2]. 34
Standing tree quality can be evaluated using differ- 35
ent techniques [3]. First, a visual inspection is priv- 36
ileged, but can be insufficient to detect inner decay. 37
The use of specialized tools include micro-drill resis- 38
tance measurements [4], a widely used technique con- 39
sisting on drilling through the tree trunk following 40
a straight path while measuring the penetration re- 41
sistance. Basically, defects such as decay and cracks 42
present a reduced resistance to the drill, a pattern 43
that can be detected. However, this technique is lim- 44
ited by the selected orientation, it is difficult to assure 45
going through the defect. 46
Other group of techniques uses stress waves tim- 47
ing to evaluate wood quality and trees inner state. 48
The basic consideration is that decay inside wood 49
will have an influence in the propagation of elastic 50
waves: at low velocity regions, such as decay, veloc- 51
ity decreases and signal attenuation increases [5]. For 52
standing trees testing, commercial approaches include 53
the IML Impulse Hammer, the Fakkop 2D Microsec- 54
ond Timer and the Sylvatest [6]. Wood mechanical 55
properties can be estimated using the measured ve- 56
locities, for example, using the Christoffel equation 57
[7, 8, 9]. Accuracy on the time-of-flight estimation is 58
crucial to perform a correct wood evaluation. Addi- 59
tionally, resonance-based methods present an alterna- 60
tive for velocity detection based on the analysis of the 61
stress waves natural frequencies, traveling through the 62
wood [10, 11]. 63
Considering 2D imaging, ultrasonic tomography is 64
one of the techniques used for non-destructive control 65
of standing trees [12, 13, 14, 15, 16, 17, 18]. This 66
method consists on cross-sectional imaging from the 67
tree trunk using either reflection or transmission wave 68
propagation data. Usually, the parameter used to 69
Espinosa et al., p. 2
build the image is the time-of-flight (TOF) taken by70
the ultrasonic wave from the transmitter to the mul-71
tiple receivers. Thus, TOF determination is a critical72
step to perform image reconstruction [19]; image qual-73
ity is highly dependent on the precision of the TOF74
measurement.75
Considering conventional ultrasonic testing, the ob-76
ject is excited with a pulse, and TOF measurement77
rely on the estimation of the signal instantaneous78
power by determining the first arrival above a noise79
threshold, defined by the user [20, 21]. Also, a pulse80
train can be used to boost the transmitted energy81
for a specific frequency [22]. Automatic methods for82
detecting first arrivals have been proposed, including83
pickers based on the Akaike information criteria (AIC)84
[23, 24] and the Hinkley criteria [25]. Alternatives in-85
clude the transmission of encoded waveforms, such86
as the chirp-coded excitation method, where a recog-87
nizable signature is sent through the media and the88
TOF is estimated using a cross-correlation function89
[26, 27, 28]. In consideration of the wide range of sig-90
nals and TOF detection techniques, the choice of pa-91
rameters for standing tree ultrasonic testing demands92
an evaluation of the accuracy of the aforementioned93
methods.94
This study aimed to compare several signal shapes95
and TOF detection methods, for setting up an ul-96
trasonic chain of measurement in order to perform97
non-destructive evaluation of standing trees. Impul-98
sive and encoded signals were tested, combined with99
three different methods for TOF estimation: Thresh-100
old, AIC method and cross-correlation. First, ex-101
perimental setting is presented, including electrical102
specification for the ultrasonic chain, the excitation103
signal parameters and a description of the TOF de-104
tection methods. Then, energy and signal-to-noise105
ratios are computed for all configurations. A time-106
frequency analysis using the Gabor transform is per-107
formed, aiming to inspect energy distribution. Lastly,108
wave transit times are reported, computing dispersion109
among experiments repetition, to establish which set-110
ting leads to highest accuracy.111
2 Materials and methods112
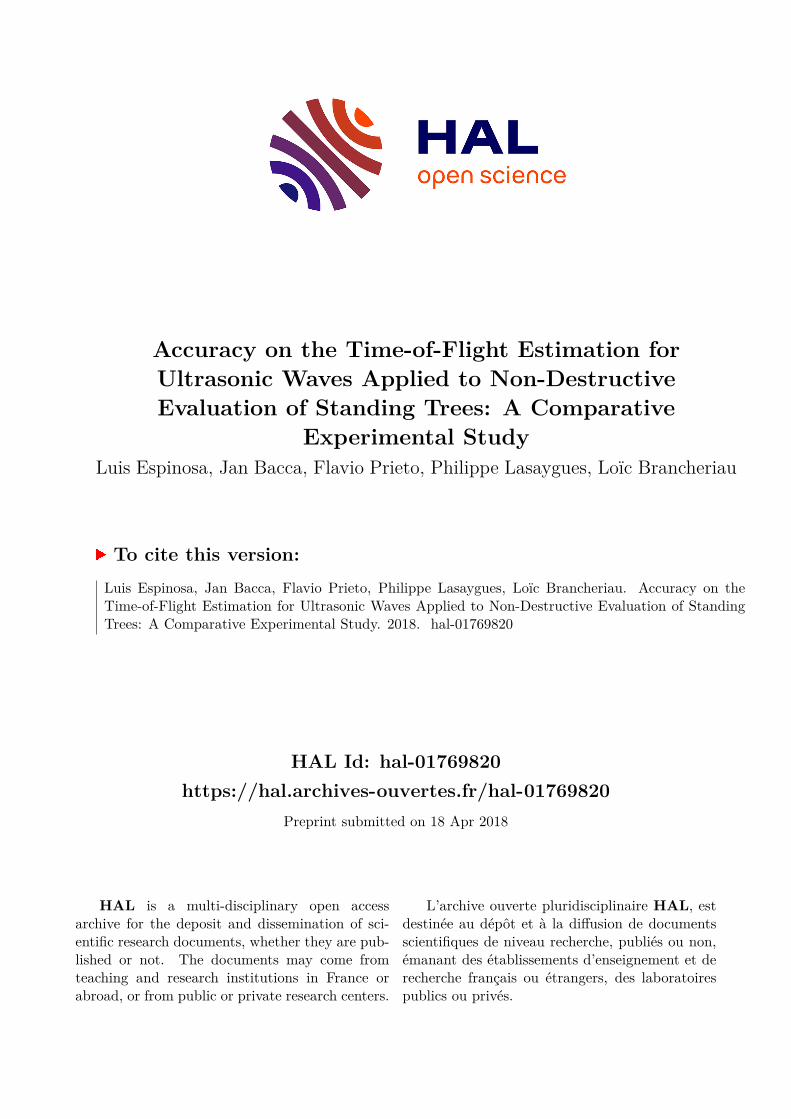
A standing plane tree (Platanus × acerifolia (Aiton)113
Willd) was tested (Figure 1). Probes distance above114
the ground was 120 cm. The trunk diameter was115
23 cm, with a regular cross-section. Tests were con-116
ducted in dormancy period (winter). Two ultrasonic117
pair of sensors were used: Physical Acoustics Corpo-118
ration R3α and R6α. Sensor R3α has a main resonant119
frequency at 36 kHz and two secondary resonant fre-120
quencies at 22 kHz and 95 kHz; operating frequency121
range indicated by the manufacturer is from 25 to 70122
kHz. Sensor R6α has a main resonant frequency at123
60 kHz and two secondary resonant frequencies at 37124
Figure 1: Platanus standing tree tested.
kHz and 97 kHz; operating frequency range indicated 125
by the manufacturer is from 35 to 100 kHz. These 126
sensors are intended for general purpose ultrasonic 127
testing, presenting a solid stainless steel body with 128
a flat ceramic face. A fluid couplant was used. The 129
position of the sensor acting as transmitter was fixed; 130
the receiver position changed in 4 equidistant points 131
at angles located along half the trunk circumference: 132
45◦, 90◦, 135◦ and 180◦. 133
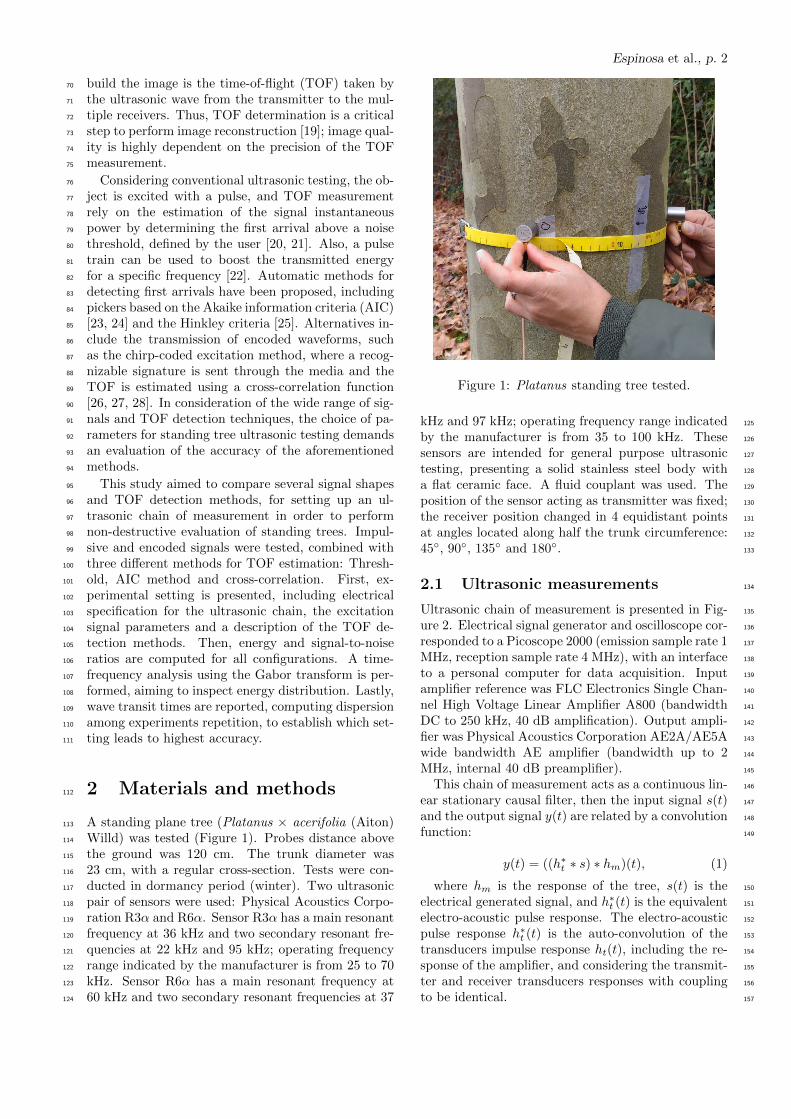
2.1 Ultrasonic measurements 134
Ultrasonic chain of measurement is presented in Fig- 135
ure 2. Electrical signal generator and oscilloscope cor- 136
responded to a Picoscope 2000 (emission sample rate 1 137
MHz, reception sample rate 4 MHz), with an interface 138
to a personal computer for data acquisition. Input 139
amplifier reference was FLC Electronics Single Chan- 140
nel High Voltage Linear Amplifier A800 (bandwidth 141
DC to 250 kHz, 40 dB amplification). Output ampli- 142
fier was Physical Acoustics Corporation AE2A/AE5A 143
wide bandwidth AE amplifier (bandwidth up to 2 144
MHz, internal 40 dB preamplifier). 145
This chain of measurement acts as a continuous lin- 146
ear stationary causal filter, then the input signal s(t) 147
and the output signal y(t) are related by a convolution 148
function: 149
y(t) = ((h∗t ∗ s) ∗ hm)(t), (1)
where hm is the response of the tree, s(t) is the 150
electrical generated signal, and h∗t (t) is the equivalent 151
electro-acoustic pulse response. The electro-acoustic 152
pulse response h∗t (t) is the auto-convolution of the 153
transducers impulse response ht(t), including the re- 154
sponse of the amplifier, and considering the transmit- 155
ter and receiver transducers responses with coupling 156
to be identical. 157
Espinosa et al., p. 3
Tree
Signal
generatorOscilloscope
Transmitter Receiver
40dB 40dB
0
4590
135
180o
o
oo
o
y(t)
hm(t)
s(t)
ht(t) ht(t)
Figure 2: Ultrasonic chain for measurements.
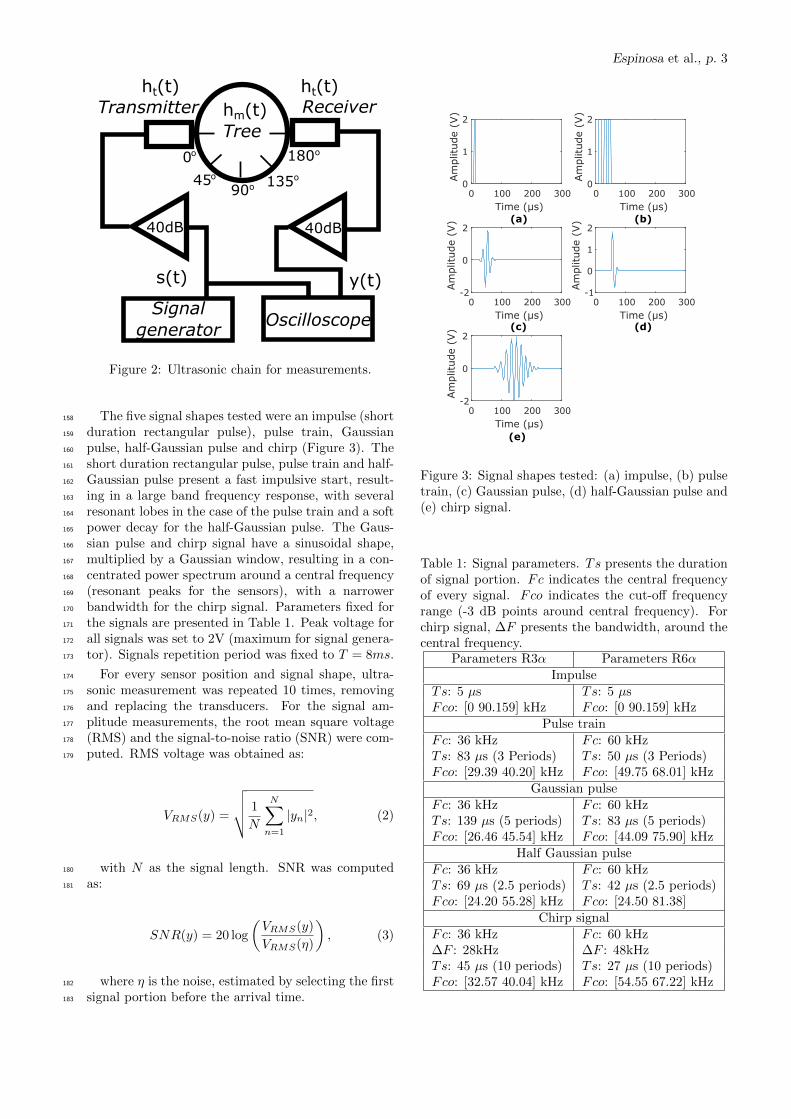
The five signal shapes tested were an impulse (short158
duration rectangular pulse), pulse train, Gaussian159
pulse, half-Gaussian pulse and chirp (Figure 3). The160
short duration rectangular pulse, pulse train and half-161
Gaussian pulse present a fast impulsive start, result-162
ing in a large band frequency response, with several163
resonant lobes in the case of the pulse train and a soft164
power decay for the half-Gaussian pulse. The Gaus-165
sian pulse and chirp signal have a sinusoidal shape,166
multiplied by a Gaussian window, resulting in a con-167
centrated power spectrum around a central frequency168
(resonant peaks for the sensors), with a narrower169
bandwidth for the chirp signal. Parameters fixed for170
the signals are presented in Table 1. Peak voltage for171
all signals was set to 2V (maximum for signal genera-172
tor). Signals repetition period was fixed to T = 8ms.173
For every sensor position and signal shape, ultra-174
sonic measurement was repeated 10 times, removing175
and replacing the transducers. For the signal am-176
plitude measurements, the root mean square voltage177
(RMS) and the signal-to-noise ratio (SNR) were com-178
puted. RMS voltage was obtained as:179
VRMS(y) =
√√√√ 1
N
N∑n=1
|yn|2, (2)
with N as the signal length. SNR was computed180
as:181
SNR(y) = 20 log
(VRMS(y)
VRMS(η)
), (3)
where η is the noise, estimated by selecting the first182
signal portion before the arrival time.183
0 100 200 300
Time (µs)
0
1
2
Am
plitu
de
(V)
(a)
0 100 200 300
Time (µs)
0
1
2
Am
plitu
de (
V)
(b)
0 100 200 300
Time (µs)
-2
0
2
Am
plitu
de (
V)
(c)
0 100 200 300
Time (µs)
-1
0
1
2
Am
plitu
de (
V)
(d)
0 100 200 300
Time (µs)
-2
0
2
Am
plitu
de (
V)
(e)
Figure 3: Signal shapes tested: (a) impulse, (b) pulsetrain, (c) Gaussian pulse, (d) half-Gaussian pulse and(e) chirp signal.
Table 1: Signal parameters. Ts presents the durationof signal portion. Fc indicates the central frequencyof every signal. Fco indicates the cut-off frequencyrange (-3 dB points around central frequency). Forchirp signal, ∆F presents the bandwidth, around thecentral frequency.
Parameters R3α Parameters R6αImpulse
Ts: 5 µs Ts: 5 µsFco: [0 90.159] kHz Fco: [0 90.159] kHz
Pulse trainFc: 36 kHz Fc: 60 kHzTs: 83 µs (3 Periods) Ts: 50 µs (3 Periods)Fco: [29.39 40.20] kHz Fco: [49.75 68.01] kHz
Gaussian pulseFc: 36 kHz Fc: 60 kHzTs: 139 µs (5 periods) Ts: 83 µs (5 periods)Fco: [26.46 45.54] kHz Fco: [44.09 75.90] kHz
Half Gaussian pulseFc: 36 kHz Fc: 60 kHzTs: 69 µs (2.5 periods) Ts: 42 µs (2.5 periods)Fco: [24.20 55.28] kHz Fco: [24.50 81.38]
Chirp signalFc: 36 kHz Fc: 60 kHz∆F : 28kHz ∆F : 48kHzTs: 45 µs (10 periods) Ts: 27 µs (10 periods)Fco: [32.57 40.04] kHz Fco: [54.55 67.22] kHz
Espinosa et al., p. 4
2.2 Time-of-flight detection methods184
Threshold185
Threshold level for the received signal had to be de-186
fined above the noise level [16]. The threshold level is187
defined to be m times the standard deviation of the188
noise, with m as a user-defined parameter. For the ex-189
periments, this value was constant and fixed by trial190
and error to 8. TOF is then selected to be the first191
time point where signal is above the threshold level.192
AIC method193
This method assumes that signal can be divided into194
two local stationary segments, before and after the on-195
set time, each one modeled as an autoregressive pro-196
cess. The time instant where the Akaike information197
criterion (AIC) is minimized, corresponds to the op-198
timal separation between noise and signal, this is, the199
onset time [22]. For a signal divided at point k into200
two segments y1 (before k) and y2 (after k), the AIC201
criterion is computed as:202
AIC[k] = k log(σ2(y1)) + (N − k) log(σ2(y2)). (4)
TOF value is obtained by founding the time point203
where the AIC criterion reach the global minimum.204
Cross-correlation205
When a recognizable signature is sent through the206
media, such as chirp signal, input and output signals207
delay time can be obtained using cross-correlation208
[26, 27, 28]. The maximum value for the cross-209
correlation function between two signals indicates210
their delay time. Normalized cross-correlation func-211
tion is:212
rsy[l] =1√EsEy
N∑k=0
s[k]y[k − l], (5)
where Es and Ey correspond to the signals energy and213
N is the signal length.214
3 Results215
3.1 Signal amplitude measurement216
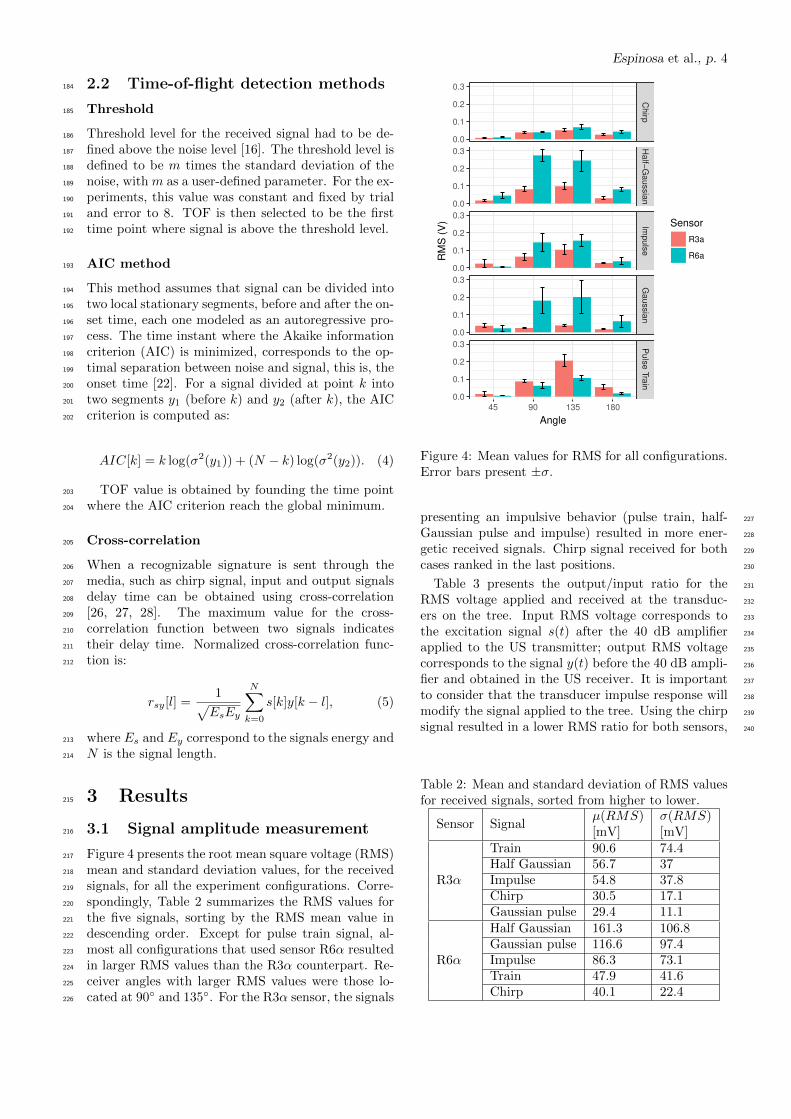
Figure 4 presents the root mean square voltage (RMS)217
mean and standard deviation values, for the received218
signals, for all the experiment configurations. Corre-219
spondingly, Table 2 summarizes the RMS values for220
the five signals, sorting by the RMS mean value in221
descending order. Except for pulse train signal, al-222
most all configurations that used sensor R6α resulted223
in larger RMS values than the R3α counterpart. Re-224
ceiver angles with larger RMS values were those lo-225
cated at 90◦ and 135◦. For the R3α sensor, the signals226
Ch
irpH
alf−
Ga
ussia
nIm
pu
lse
Ga
ussia
nP
uls
e T
rain
45 90 135 180
0.0
0.1
0.2
0.3
0.0
0.1
0.2
0.3
0.0
0.1
0.2
0.3
0.0
0.1
0.2
0.3
0.0
0.1
0.2
0.3
Angle
RM
S (
V) Sensor
R3a
R6a
Figure 4: Mean values for RMS for all configurations.Error bars present ±σ.
presenting an impulsive behavior (pulse train, half- 227
Gaussian pulse and impulse) resulted in more ener- 228
getic received signals. Chirp signal received for both 229
cases ranked in the last positions. 230
Table 3 presents the output/input ratio for the 231
RMS voltage applied and received at the transduc- 232
ers on the tree. Input RMS voltage corresponds to 233
the excitation signal s(t) after the 40 dB amplifier 234
applied to the US transmitter; output RMS voltage 235
corresponds to the signal y(t) before the 40 dB ampli- 236
fier and obtained in the US receiver. It is important 237
to consider that the transducer impulse response will 238
modify the signal applied to the tree. Using the chirp 239
signal resulted in a lower RMS ratio for both sensors, 240
Table 2: Mean and standard deviation of RMS valuesfor received signals, sorted from higher to lower.
Sensor Signalµ(RMS)[mV]
σ(RMS)[mV]
R3α
Train 90.6 74.4Half Gaussian 56.7 37Impulse 54.8 37.8Chirp 30.5 17.1Gaussian pulse 29.4 11.1
R6α
Half Gaussian 161.3 106.8Gaussian pulse 116.6 97.4Impulse 86.3 73.1Train 47.9 41.6Chirp 40.1 22.4

Espinosa et al., p. 5
Table 3: Ratio between output (y(t) before 40dB am-plification) and input (s(t) after 40dB amplification)RMS values for all signals, sorted from higher to lower.
Sensor Signals(t)VRMS
[mV]
y(t)VRMS
[mV]
Out/InRatio[dB]
R3α
Impulse 50.0 54.8 -79.2Half-Gaussian 54.9 56.7 -79.7Train 139.6 90.6 -83.7Gaussian pulse 78.5 29.4 -88.6Chirp 141.9 30.5 -93.6
R6α
Half-Gaussian 45 161.3 -68.9Gaussian pulse 60.8 116.6 -74.3Impulse 50.0 86.3 -75.2Train 109.5 47.9 -87.1Chirp 109.4 40.1 -88.6
Table 4: Mean and standard deviation of SNR valuesfor received signals, sorted from higher to lower.
Sensor Signalµ(SNR)[dB]
σ(SNR)[dB]
R3α
Train 33.11 6.48Impulse 32.67 5.31Gaussian pulse 29.77 5.08Half-Gaussian 29 7.09Chirp 27.58 7.21
R6α
Train 41.71 10.85Impulse 40.52 12.35Gaussian pulse 35.02 11.75Half-Gaussian 30.51 6.9Chirp 21.81 6.53
and signals such as the half Gaussian pulse and the241
impulse resulted in the larger ratios.242
Figure 5 presents the signal-to-noise ratio (SNR)243
mean and standard deviation values. Table 4 sum-244
marizes the SNR values, sorting by SNR mean value245
in descending order. Average SNR values over all re-246
ceiver angles ranged between 20 and 40 dB, indicating247
low presence of noise. Only exception correspond to248
chirp signal when using the R6α located at 45◦, where249
mean SNR was around 10 dB. As obtained for the250
RMS measurements, SNR values for the sensor R6α251
were higher than those obtained for R3α. Impulsive-252
like signals, as the pulse train and impulse, presented253
the highest SNR ratios.254
3.2 Time-frequency analysis255
As the frequency contents of the received signals var-256
ied over the time, we used a time-frequency analysis257
to obtain a representation of the input and output258
signals behavior for the ultrasonic chain of measure-259
ment. From several alternatives to perfom the time-260
frequency analysis, the Gabor transform was used261
[29, 30].262
Ch
irpH
alf−
Ga
ussia
nIm
pu
lse
Ga
ussia
nP
uls
e T
rain
45 90 135 180
0
20
40
0
20
40
0
20
40
0
20
40
0
20
40
Angle
SN
R (
dB
) Sensor
R3a
R6a
Figure 5: Mean values for SNR for all configurations.Error bars present ±σ.
For this study, resolution in time was set to 0.1 ms 263
and resolution in frequency was set to 5 kHz. The 264
receiver angle selected for the analysis was 135◦, con- 265
sidering it presents the most energetic signals, with 266
higher SNR ratios. 267
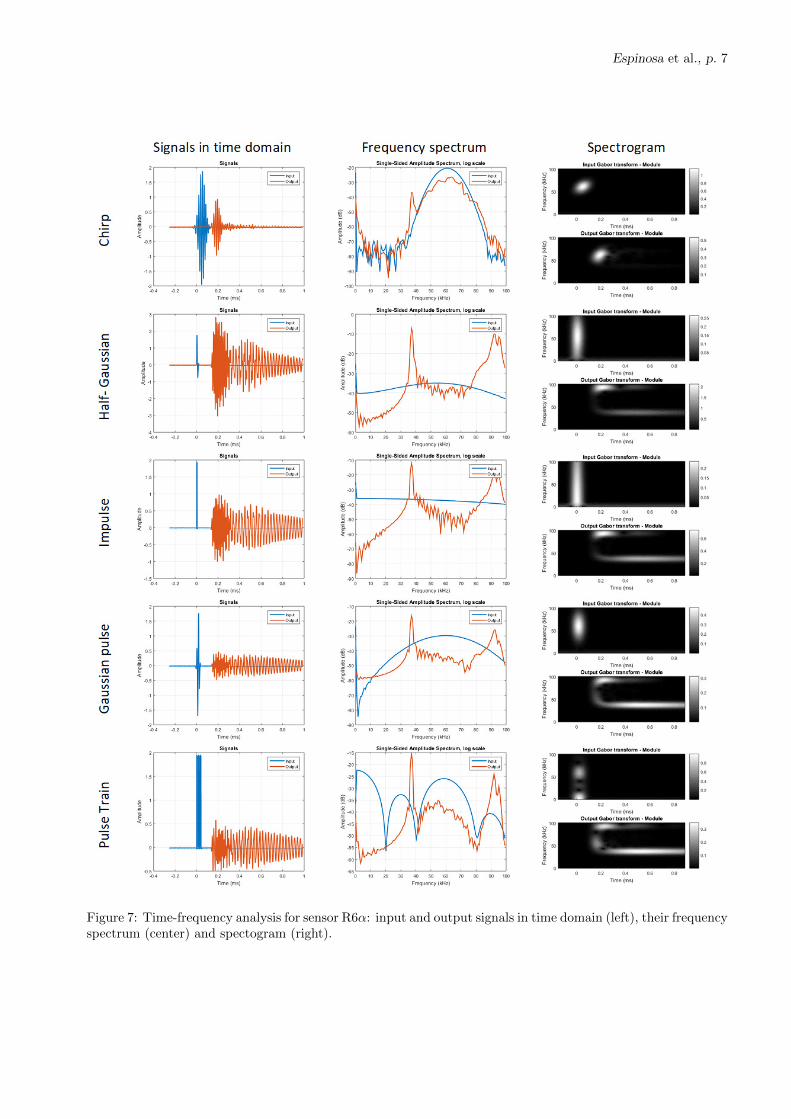
Figure 6 and Figure 7 present first the input and 268
output signals on time domain, then their frequency 269
spectrum and finally the input and output spectro- 270
grams, for sensors R3α and R6α respectively. 271
Chirp is the only signal able to concentrate the en- 272
ergy around the central frequency for both sensors on 273
the output signal. Gaussian pulse presented power 274
concentration at frequencies near to the excitation 275
central frequencies only for sensor R3α; mean power 276
frequencies did not correspond for sensor R6α where 277
energy dissipated at different frequencies from 60 kHz 278
(mainly 37 kHz and 97 kHz). The other signals pre- 279
sented energy concentration mainly on the other sen- 280
sor resonant peaks: for R3α at the third resonant 281
peak (95 kHz), and for R6α in first and third reso- 282
nant peaks (37 kHz and 97 kHz). 283
3.3 TOF determination 284
Time-of-flight was obtained for all the experiment 285
configurations, using the Threshold and AIC method. 286
Cross-correlation was used exclusively for the chirp 287
signal, given that is the only excitation signal with 288
a similar shape on the output for both sensors, and 289
therefore, chirp signal results are studied separately. 290
For the sensor R3α, Figure 8 shows the mean and 291

Espinosa et al., p. 6
Figure 6: Time-frequency analysis for sensor R3α: input and output signals in time domain (left), frequencyspectrum (center) and spectogram (right).
Espinosa et al., p. 7
Figure 7: Time-frequency analysis for sensor R6α: input and output signals in time domain (left), their frequencyspectrum (center) and spectogram (right).

Espinosa et al., p. 8
Pulse Train
Gaussian
Impulse
Half−Gaussian
80 100 120 140
45
90
135
180
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
Threshold method
Pulse Train
Gaussian
Impulse
Half−Gaussian
60 80 100 120 140
45
90
135
180
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
AIC method
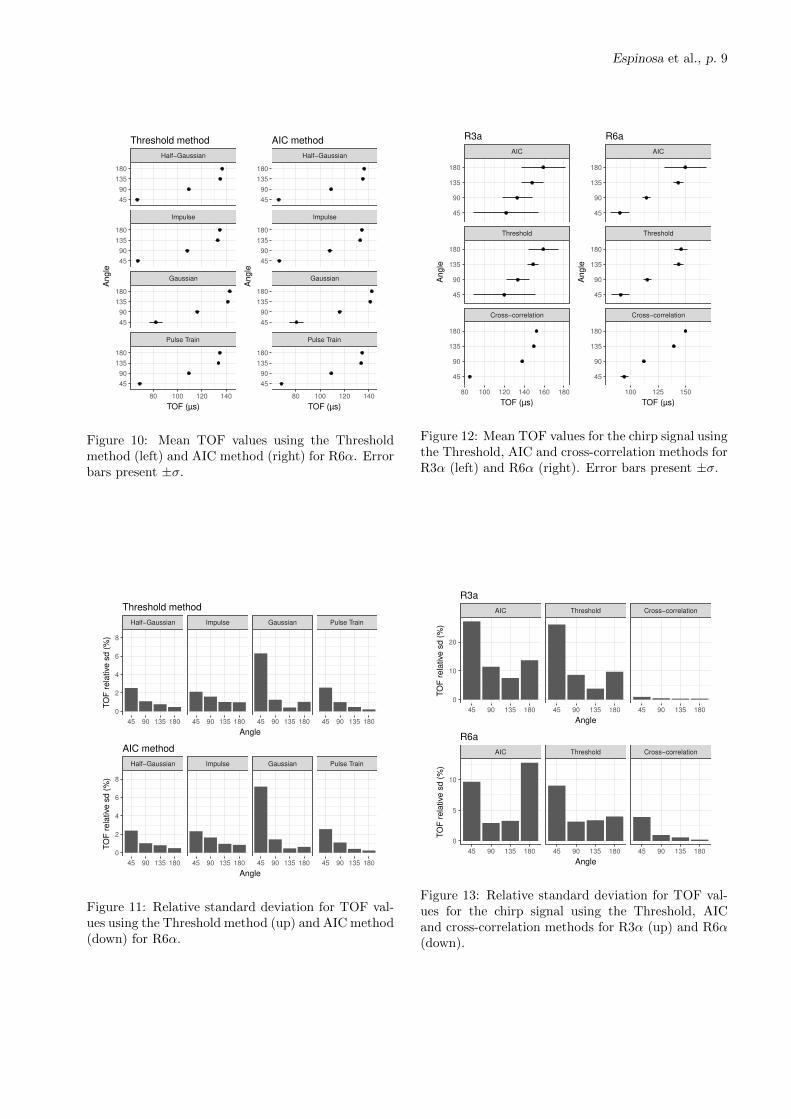
Figure 8: Mean TOF values using the Thresholdmethod (left) and AIC method (right) for R3α. Errorbars present ±σ.
standard deviation values for the TOF estimated us-292
ing the threshold technique and AIC methods, for all293
signals except chirp. Mean TOF values ranged be-294
tween 65µs to 143µs. Difference in mean values es-295
timated with the two methods was always inferior to296
1.4 µs. Standard deviation ranged between 0.3 µs to297
8.8 µs for threshold method and 0.2 µs to 6.7 µs for298
AIC method. To obtain a clearer view of variability299
on the mean TOF estimation, Figure 9 presents the300
relative standard deviation (coefficient of variation),301
computed as the standard deviation divided by the302
corresponding mean value, and presented as a per-303
centage. Concerning the angle, variations were larger304
when sensor position angle was 45◦, and decreased as305
this angle approached to 180◦, this is the sensor lo-306
cated opposed at radial direction. Lower variability307
was obtained for impulse signal, with coefficients of308
variation ranging from 0.33to 1.67%. Gaussian signal309
presented the larger variability, considering that the310
AIC and threshold method work better with initial311
impulsive signal.312
In the case of the sensor R6α, Figure 10 presents the313
mean and standard deviation values for the TOF esti-314
mated using the threshold technique and AIC meth-315
ods, for all signals except chirp. Mean TOF values316
ranged between 66µs to 143µs, equivalent to the val-317
ues for sensor R3α. Difference in mean values esti-318
mated with the two methods was always inferior to319
1µs. Standard deviation ranged between 0.5µs to320
5.2µs for threshold method and 0.5µs to 5.7µs for321
AIC method, slightly lower than the difference for sen-322
sor R3α. Figure 11 shows the relative standard devia-323
tion presented as a percentage. For the receiver posi-324
tion angle, variations were larger when sensor position325
angle was 45◦, and decreased as this angle approached326
Half−Gaussian Impulse Gaussian Pulse Train
45 90 135 180 45 90 135 180 45 90 135 180 45 90 135 180
0
2
4
6
8
Angle
TO
F r
ela
tive
sd
(%
)
Threshold method
Half−Gaussian Impulse Gaussian Pulse Train
45 90 135 180 45 90 135 180 45 90 135 180 45 90 135 180
0
2
4
6
8
Angle
TO
F r
ela
tive
sd
(%
)
AIC method
Figure 9: Relative standard deviation for TOF valuesusing the Threshold method (up) and AIC method(down) for R3α.
to 180◦. Coefficients of variation obtained for half- 327
Gaussian, impulse and pulse train signals were simi- 328
lar, always inferior to 3% for both AIC and threshold 329
approaches. Gaussian signal presented the larger vari- 330
ability again, reaching a 7% when sensor was located 331
at 180◦. 332
TOF values for chirp signal were obtained using the 333
three detection methods, including cross-correlation. 334
Figure 12 presents the mean and standard deviation 335
values for both sensors. Mean TOF values for R3α 336
ranged between 85µs to 152µs using cross-correlation 337
and 120µs to 160µs for the other two methods; 338
for R6α ranged between 94µs to 150µs with cross- 339
correlation and 90µs to 150µs with the other two 340
methods. Standard deviation for R3α ranged be- 341
tween 0.48µs to 0.79µs using cross-correlation and 342
5.7µs to 33µs for AIC and threshold methods; for 343
R6α ranged between 0.31µs to 3.69µs using cross- 344
correlation and 3.34µs to 19µs for AIC and threshold 345
methods. Chirp signal presents small amplitude vari- 346
ations at the beginning, an ill-favored condition when 347
using AIC and Threshold methods, where a first en- 348
ergetic arrival is expected; therefore the method pre- 349
senting less variation is the cross-correlation method. 350
Figure 13 presents the relative standard deviation val- 351
ues, where the large difference for cross-correlation 352
compared to the other two methods is clearly ob- 353
served: for R3α sensor the coefficient of variation us- 354
ing cross-correlation was smaller than 1% while for 355
the other two methods ranked between 3.8% to 27%; 356
similarly for R6α, using cross-correlation resulted in a 357
coefficient of variation ranking between 0.2% to 3.9% 358
compared to a range going from 3% to 12.7% for AIC 359
and threshold methods. 360
Espinosa et al., p. 9
Pulse Train
Gaussian
Impulse
Half−Gaussian
80 100 120 140
45
90
135
180
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
Threshold method
Pulse Train
Gaussian
Impulse
Half−Gaussian
80 100 120 140
45
90
135
180
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
AIC method
Figure 10: Mean TOF values using the Thresholdmethod (left) and AIC method (right) for R6α. Errorbars present ±σ.
Half−Gaussian Impulse Gaussian Pulse Train
45 90 135 180 45 90 135 180 45 90 135 180 45 90 135 180
0
2
4
6
8
Angle
TO
F r
ela
tive
sd
(%
)
Threshold method
Half−Gaussian Impulse Gaussian Pulse Train
45 90 135 180 45 90 135 180 45 90 135 180 45 90 135 180
0
2
4
6
8
Angle
TO
F r
ela
tive
sd
(%
)
AIC method
Figure 11: Relative standard deviation for TOF val-ues using the Threshold method (up) and AIC method(down) for R6α.
Cross−correlation
Threshold
AIC
80 100 120 140 160 180
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
R3a
Cross−correlation
Threshold
AIC
100 125 150
45
90
135
180
45
90
135
180
45
90
135
180
TOF (µs)
An
gle
R6a
Figure 12: Mean TOF values for the chirp signal usingthe Threshold, AIC and cross-correlation methods forR3α (left) and R6α (right). Error bars present ±σ.
AIC Threshold Cross−correlation
45 90 135 180 45 90 135 180 45 90 135 180
0
10
20
Angle
TO
F r
ela
tive
sd
(%
)
R3a
AIC Threshold Cross−correlation
45 90 135 180 45 90 135 180 45 90 135 180
0
5
10
Angle
TO
F r
ela
tive
sd
(%
)
R6a
Figure 13: Relative standard deviation for TOF val-ues for the chirp signal using the Threshold, AICand cross-correlation methods for R3α (up) and R6α(down).
Espinosa et al., p. 10
4 Discussion361
Signal energy received in angle 45◦ was significantly362
lower than those obtained for the other angles, even363
if this position implies the shorter distance between364
transmitter and receiver tested. The transmitter365
placed at 135◦ resulted generally in the larger signal366
energy received. Ultrasonic beams for these sensors367
are affected by the transducer directivity pattern, re-368
sulting in a higher radiation intensity in the frontal369
direction of the sensor, that is orientated in radial di-370
rection in the experiments. Other effect is related to371
the propagation of waves in wood: wood anisotropy372
affects wave propagation, including a curvature of ray373
paths from transmitter to receivers, with respect to374
straight line paths for an isotropic case. [31, 32].375
Signals with an initial impulsive response (impulse,376
pulse train and half-Gaussian pulse), resulted in larger377
energy received, but this energy was spread over sev-378
eral frequency bands, as seen on the time-frequency379
analysis, where the only signal able to concentrate the380
energy around the sensor central frequency was the381
chirp, the same one that presented a lower received382
energy. So, the compromise implies higher received383
energy but widely spread frequency spectrum or lower384
received energy but well concentrated frequency spec-385
trum.386
Threshold and Akaike methods for TOF detection387
presented highly similar results, as observed in a pre-388
vious study [33], where it was shown that those two389
methods performed in agreement when the received390
signals presented SNR ratios above 20 dB. However,391
Akaike method presents as advantage that it does392
not need user-defined parameters, like the α value in393
threshold case, which variation will result in a differ-394
ent TOF estimation. Inaccuracy increases using AIC395
method when the SNR is very low, i.e. below 10 dB.396
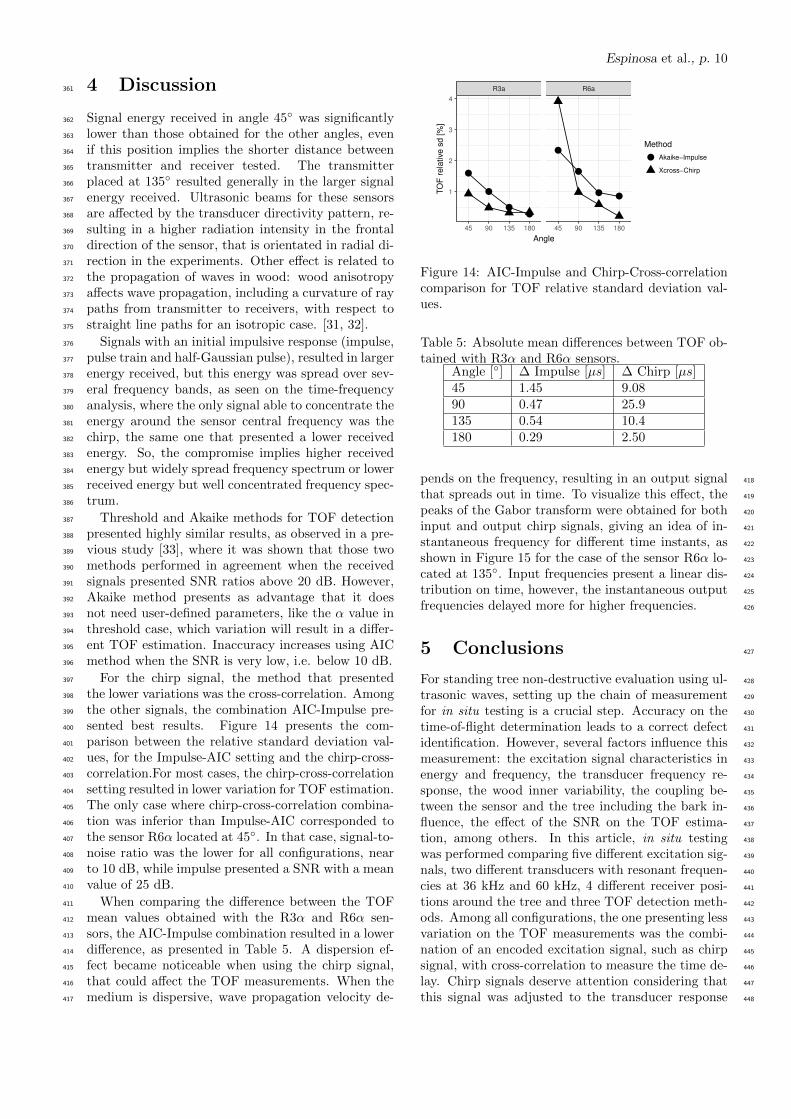
For the chirp signal, the method that presented397
the lower variations was the cross-correlation. Among398
the other signals, the combination AIC-Impulse pre-399
sented best results. Figure 14 presents the com-400
parison between the relative standard deviation val-401
ues, for the Impulse-AIC setting and the chirp-cross-402
correlation.For most cases, the chirp-cross-correlation403
setting resulted in lower variation for TOF estimation.404
The only case where chirp-cross-correlation combina-405
tion was inferior than Impulse-AIC corresponded to406
the sensor R6α located at 45◦. In that case, signal-to-407
noise ratio was the lower for all configurations, near408
to 10 dB, while impulse presented a SNR with a mean409
value of 25 dB.410
When comparing the difference between the TOF411
mean values obtained with the R3α and R6α sen-412
sors, the AIC-Impulse combination resulted in a lower413
difference, as presented in Table 5. A dispersion ef-414
fect became noticeable when using the chirp signal,415
that could affect the TOF measurements. When the416
medium is dispersive, wave propagation velocity de-417
R3a R6a
45 90 135 180 45 90 135 180
1
2
3
4
Angle
TO
F r
ela
tive
sd
[%
]
Method
Akaike−Impulse
Xcross−Chirp
Figure 14: AIC-Impulse and Chirp-Cross-correlationcomparison for TOF relative standard deviation val-ues.
Table 5: Absolute mean differences between TOF ob-tained with R3α and R6α sensors.
Angle [◦] ∆ Impulse [µs] ∆ Chirp [µs]45 1.45 9.0890 0.47 25.9135 0.54 10.4180 0.29 2.50
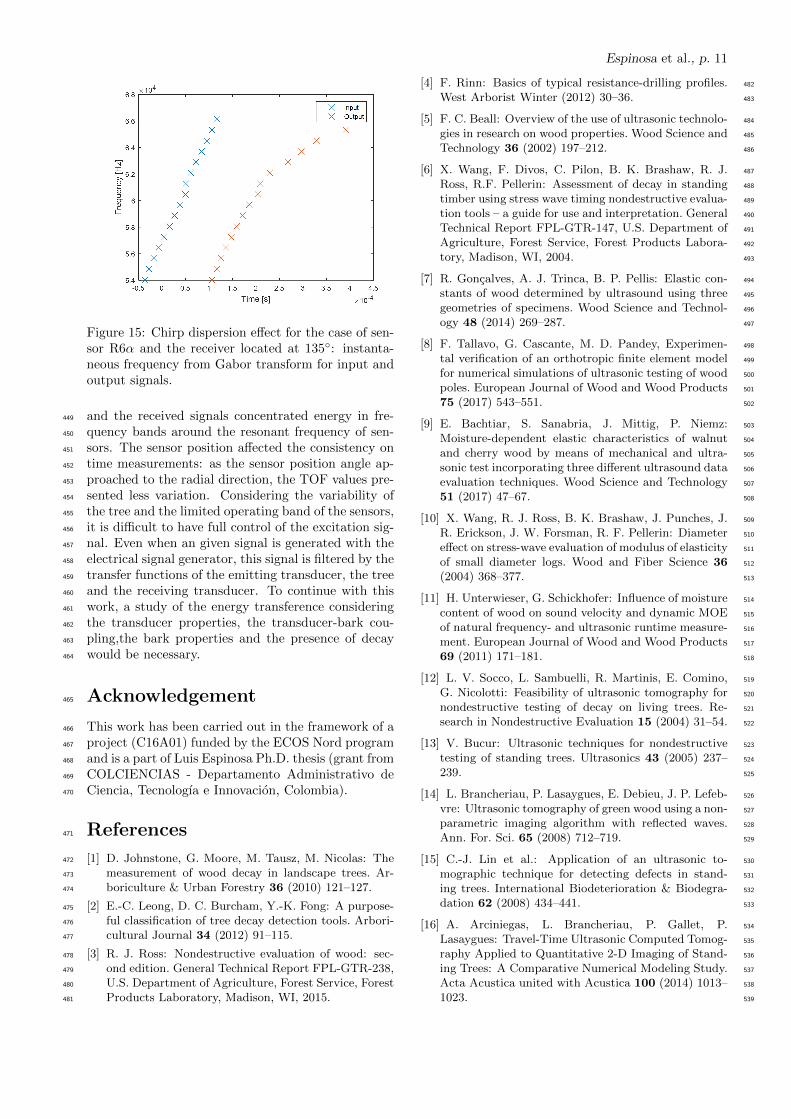
pends on the frequency, resulting in an output signal 418
that spreads out in time. To visualize this effect, the 419
peaks of the Gabor transform were obtained for both 420
input and output chirp signals, giving an idea of in- 421
stantaneous frequency for different time instants, as 422
shown in Figure 15 for the case of the sensor R6α lo- 423
cated at 135◦. Input frequencies present a linear dis- 424
tribution on time, however, the instantaneous output 425
frequencies delayed more for higher frequencies. 426
5 Conclusions 427
For standing tree non-destructive evaluation using ul- 428
trasonic waves, setting up the chain of measurement 429
for in situ testing is a crucial step. Accuracy on the 430
time-of-flight determination leads to a correct defect 431
identification. However, several factors influence this 432
measurement: the excitation signal characteristics in 433
energy and frequency, the transducer frequency re- 434
sponse, the wood inner variability, the coupling be- 435
tween the sensor and the tree including the bark in- 436
fluence, the effect of the SNR on the TOF estima- 437
tion, among others. In this article, in situ testing 438
was performed comparing five different excitation sig- 439
nals, two different transducers with resonant frequen- 440
cies at 36 kHz and 60 kHz, 4 different receiver posi- 441
tions around the tree and three TOF detection meth- 442
ods. Among all configurations, the one presenting less 443
variation on the TOF measurements was the combi- 444
nation of an encoded excitation signal, such as chirp 445
signal, with cross-correlation to measure the time de- 446
lay. Chirp signals deserve attention considering that 447
this signal was adjusted to the transducer response 448
Espinosa et al., p. 11
Figure 15: Chirp dispersion effect for the case of sen-sor R6α and the receiver located at 135◦: instanta-neous frequency from Gabor transform for input andoutput signals.
and the received signals concentrated energy in fre-449
quency bands around the resonant frequency of sen-450
sors. The sensor position affected the consistency on451
time measurements: as the sensor position angle ap-452
proached to the radial direction, the TOF values pre-453
sented less variation. Considering the variability of454
the tree and the limited operating band of the sensors,455
it is difficult to have full control of the excitation sig-456
nal. Even when an given signal is generated with the457
electrical signal generator, this signal is filtered by the458
transfer functions of the emitting transducer, the tree459
and the receiving transducer. To continue with this460
work, a study of the energy transference considering461
the transducer properties, the transducer-bark cou-462
pling,the bark properties and the presence of decay463
would be necessary.464
Acknowledgement465
This work has been carried out in the framework of a466
project (C16A01) funded by the ECOS Nord program467
and is a part of Luis Espinosa Ph.D. thesis (grant from468
COLCIENCIAS - Departamento Administrativo de469
Ciencia, Tecnologıa e Innovacion, Colombia).470
References471
[1] D. Johnstone, G. Moore, M. Tausz, M. Nicolas: The472
measurement of wood decay in landscape trees. Ar-473
boriculture & Urban Forestry 36 (2010) 121–127.474
[2] E.-C. Leong, D. C. Burcham, Y.-K. Fong: A purpose-475
ful classification of tree decay detection tools. Arbori-476
cultural Journal 34 (2012) 91–115.477
[3] R. J. Ross: Nondestructive evaluation of wood: sec-478
ond edition. General Technical Report FPL-GTR-238,479
U.S. Department of Agriculture, Forest Service, Forest480
Products Laboratory, Madison, WI, 2015.481
[4] F. Rinn: Basics of typical resistance-drilling profiles. 482
West Arborist Winter (2012) 30–36. 483
[5] F. C. Beall: Overview of the use of ultrasonic technolo- 484
gies in research on wood properties. Wood Science and 485
Technology 36 (2002) 197–212. 486
[6] X. Wang, F. Divos, C. Pilon, B. K. Brashaw, R. J. 487
Ross, R.F. Pellerin: Assessment of decay in standing 488
timber using stress wave timing nondestructive evalua- 489
tion tools – a guide for use and interpretation. General 490
Technical Report FPL-GTR-147, U.S. Department of 491
Agriculture, Forest Service, Forest Products Labora- 492
tory, Madison, WI, 2004. 493
[7] R. Goncalves, A. J. Trinca, B. P. Pellis: Elastic con- 494
stants of wood determined by ultrasound using three 495
geometries of specimens. Wood Science and Technol- 496
ogy 48 (2014) 269–287. 497
[8] F. Tallavo, G. Cascante, M. D. Pandey, Experimen- 498
tal verification of an orthotropic finite element model 499
for numerical simulations of ultrasonic testing of wood 500
poles. European Journal of Wood and Wood Products 501
75 (2017) 543–551. 502
[9] E. Bachtiar, S. Sanabria, J. Mittig, P. Niemz: 503
Moisture-dependent elastic characteristics of walnut 504
and cherry wood by means of mechanical and ultra- 505
sonic test incorporating three different ultrasound data 506
evaluation techniques. Wood Science and Technology 507
51 (2017) 47–67. 508
[10] X. Wang, R. J. Ross, B. K. Brashaw, J. Punches, J. 509
R. Erickson, J. W. Forsman, R. F. Pellerin: Diameter 510
effect on stress-wave evaluation of modulus of elasticity 511
of small diameter logs. Wood and Fiber Science 36 512
(2004) 368–377. 513
[11] H. Unterwieser, G. Schickhofer: Influence of moisture 514
content of wood on sound velocity and dynamic MOE 515
of natural frequency- and ultrasonic runtime measure- 516
ment. European Journal of Wood and Wood Products 517
69 (2011) 171–181. 518
[12] L. V. Socco, L. Sambuelli, R. Martinis, E. Comino, 519
G. Nicolotti: Feasibility of ultrasonic tomography for 520
nondestructive testing of decay on living trees. Re- 521
search in Nondestructive Evaluation 15 (2004) 31–54. 522
[13] V. Bucur: Ultrasonic techniques for nondestructive 523
testing of standing trees. Ultrasonics 43 (2005) 237– 524
239. 525
[14] L. Brancheriau, P. Lasaygues, E. Debieu, J. P. Lefeb- 526
vre: Ultrasonic tomography of green wood using a non- 527
parametric imaging algorithm with reflected waves. 528
Ann. For. Sci. 65 (2008) 712–719. 529
[15] C.-J. Lin et al.: Application of an ultrasonic to- 530
mographic technique for detecting defects in stand- 531
ing trees. International Biodeterioration & Biodegra- 532
dation 62 (2008) 434–441. 533
[16] A. Arciniegas, L. Brancheriau, P. Gallet, P. 534
Lasaygues: Travel-Time Ultrasonic Computed Tomog- 535
raphy Applied to Quantitative 2-D Imaging of Stand- 536
ing Trees: A Comparative Numerical Modeling Study. 537
Acta Acustica united with Acustica 100 (2014) 1013– 538
1023. 539

Espinosa et al., p. 12
[17] A. J. Trinca, S. Palma, R. Goncalves: Monitoring540
of wood degradation caused by fungi using ultrasonic541
tomography. Proceedings of 19th international sym-542
posium on non-destructive testing of wood, Rio de543
Janeiro, Brazil, 2015, 15–21.544
[18] K. Yamashita, T. Yamada, Y. Ota, H. Yonezawa,545
I. Tokue: Detecting defects in standing trees by an546
acoustic wave tomography with pseudorandom binary547
sequence code: simulation of defects using artificial548
cavity. Proceedings of 19th international symposium549
on non-destructive testing of wood, Rio de Janeiro,550
Brazil, 2015, 542–546.551
[19] A. Arciniegas, F. Prieto, L. Brancheriau, P.552
Lasaygues: Literature review of acoustic and ultra-553
sonic tomography in standing trees. Trees 28 (2014)554
1559–1567.555
[20] V. Bucur: Acoustics of Wood. Springer-Verlag,556
Berlin/Heidelberg, Germany, 2006.557
[21] M. Loosvelt, P. Lasaygues: A Wavelet-Based Pro-558
cessing method for simultaneously determining ultra-559
sonic velocity and material thickness. Ultrasonics 51560
(2011) 325–339.561
[22] L. Brancheriau, A. Ghodrati, P. Gallet, P. Thaunay,562
P. Lasaygues: Application of ultrasonic tomography563
to characterize the mechanical state of standing trees564
(Picea abies). J. Phys.: Conf. Ser. 353 (2012).565
[23] R. Sleeman, T. van Eck: Robust automatic P-phase566
picking: an on-line implementation in the analysis567
of broadband seismogram recordings. Physics of the568
Earth and Planetary Interiors 113 (1999) 265–275.569
[24] H. Zhang: Automatic P-Wave Arrival Detection and570
Picking with Multiscale Wavelet Analysis for Single-571
Component Recordings. Bulletin of the Seismological572
Society of America 93 (2003) 1904–1912.573
[25] J. H. Kurz, C. U. Grosse, H.-W. Reinhardt: Strate-574
gies for reliable automatic onset time picking of acous-575
tic emissions and of ultrasound signals in concrete. Ul-576
trasonics 43 (2005) 538–546.577
[26] M. H. Pedersen, T. X. Misaridis, J. A. Jensen: Clini-578
cal evaluation of chirp-coded excitation in medical ul-579
trasound. Ultrasound in Medicine & Biology 29 (2003)580
895–905.581
[27] J. Rouyer, S. Mensah, C. Vasseur, P. Lasaygues: The582
benefits of compression methods in acoustic coherence583
tomography. Ultrason Imaging 37 (2015) 205–223.584
[28] P. Lasaygues, A. Arciniegas, L. Brancheriau: Use of a585
Chirp-coded Excitation Method in Order to Improve586
Geometrical and Acoustical Measurements in Wood587
Specimen. Physics Procedia 70 (2015) 348–351.588
[29] S. Qian, D. Chen: Joint time-frequency analysis.589
IEEE Signal Processing Magazine 16 (1999) 52–67.590
[30] R. Carmona, W. L. Hwang, B. TorrA c©sani: Practi-591
cal Time-Frequency Analysis. Academic Press, 1998.592
[31] S. Schubert, D. Gsell, J. Dual, M. Motavalli, P.593
Niemz: Acoustic wood tomography on trees and the594
challenge of wood heterogeneity. Holzforschung 63595
(2008) 107–112.596
[32] S. Gao, N. Wang, L. Wang, J. Han: Application of an 597
ultrasonic wave propagation field in the quantitative 598
identification of cavity defect of log disc. Computers 599
and Electronics in Agriculture 108 (2014) 123–129. 600
[33] A. Arciniegas, L. Brancheriau, P. Lasaygues: Tomog- 601
raphy in standing trees: revisiting the determination 602
of acoustic wave velocity. Annals of Forest Science 72 603
(2015) 685–691. 604