Embed Size (px)
Citation preview

Accep
ted M
anus
cript
1 Copyright © 2017 by ASME
Proceedings of the ASME 2017 International Design Engineering Technical Conferences &
Computers and Information in Engineering Conference
IDETC2017
August 6-9, 2017, Cleveland, Ohio, USA
IDETC2017-67024
COMPUTATIONAL DESIGN AND ADDITIVE MANUFACTURING OF CONFORMAL
METASURFACES BY COMBINING TOPOLOGY OPTIMIZATION WITH RIEMANN
MAPPING THEOREM
Panagiotis Vogiatzis Department of Mechanical Engineering
State University of New York at Stony Brook Stony Brook, NY, 11794
Email: [email protected]
Ming Ma Department of Computer Science
State University of New York at Stony Brook Stony Brook, NY, 11794
Email: [email protected]
Shikui Chen1 Department of Mechanical Engineering
State University of New York at Stony Brook Stony Brook, NY, 11794
Email: [email protected]
Xianfeng David Gu Department of Computer Science
State University of New York at Stony Brook Stony Brook, NY, 11794
Email: [email protected]
1 Address all correspondence to this author.
ABSTRACT In this paper, we present a computational framework for
computational design and additive manufacturing of spatial
free-form periodic metasurfaces. The proposed scheme rests on
the level-set based topology approach and the conformal
mapping theory. A 2D unit cell of metamaterial with tailored
effective properties is created using the level-set based topology
optimization method. The achieved unit cell is further mapped
to the 3D quad meshes on a free-form surface by applying the
conformal mapping method which can preserve the local shape
and angle when mapping the 2D design to a 3D surface. The
proposed level-set based optimization methods not only can act
as a motivator for design synthesis, but also can be seamlessly
hooked with additive manufacturing with no need of CAD
reconstructions. The proposed computational framework
provides a solution to increasing applications involving
innovative metamaterial designs on free-form surfaces in
different fields of interest. The performance of the proposed
scheme is illustrated through a benchmark example where a
negative-Poisson’s-ratio unit cell pattern is mapped to a 3D
human face and fabricated through additive manufacturing.
INTRODUCTION Metamaterials are generally defined as a group of artificial
materials which gain superior effective properties through the
inner structures rather than their composition. Metamaterials
have been considered as critical attributes and important
technology themes by a broad range of applications in
telecommunication, aerospace, defense, automotive and medical
devices, which may serve as building bricks for constructing
more advanced metadevices. Despite recent advances in
metamaterial research [1-4], conventional mechanical
metamaterial designs have been executed mainly in the regular
Cartesian space, e.g. in a 2D rectangular plane or a 3D cubical
space. With the development of additive manufacturing
technology, the time has come to think about achieving
metamaterials on a free-form surface, also termed conformal
metasurface. Such conformal metasurface can give rise to a new
range of applications, e.g. conformal cooling surfaces,
conformal sensors, artificial bone structures, etc.
There is increasing research on conformal structures and its
applications. Wang and Rosen [5] achieved a truss structure
conformed to a part’s shape using parametric modeling
techniques, and Chu et al. [6] proposed an additive
manufacturing method including conformal lattice with a unit
cell library of different mechanical properties. For radar-cross-

Accep
ted M
anus
cript
2 Copyright © 2017 by ASME
section reduction, Jang et al. [7] proposed a conformal
metamaterial absorber achieving high absorption rates in
different incident angles, by utilizing three different unit cell
designs in different zones of a curved surface. In the field of
flexible electronics, Bernhard and Lewis’s team recently
implemented conformal printing of small electrical antennas
onto the surfaces of hemispherical glass substrates [8], which is
reported to improve the antenna performance by an order of
magnitude. The ability to rationally design and efficiently
realize artistic or functional metasurfaces are important in both
art and science. While research on designing the metamaterials
has drastically advanced recently, topology optimization of
conformal metasurfaces remains untapped. There is a distinct
lack of an appropriate method that can be utilized for
metasurface design.
A common practice in metamaterial design is to obtain a
2D or 3D unit cell, a representative volume element (RVE)
under periodic boundary conditions [9]. This constitutive
building unit can be later periodically assembled in two or three
directions, to build the desired metastructure (Fig. 1). It may
also be utilized as a building unit to form a rotational periodic
structure, such as a cylinder, by a straightforward
transformation from Cartesian to the cylindrical coordinate
system. Such an obtained geometry may possess different
characteristic behavior compared to the planar metastructure
[10]. Mapping a plane unit cell to a free-form surface is
nontrivial. A potential solution is conformal mapping, an angle-
preserving Riemann mapping that can preserve the local shape.
Figure 1. Planar metastructure with 4x4 unit cells.
In this paper, a computational framework is introduced for
topology optimization and additive manufacturing of
metamaterials on a 3D free-form surface, which rests on the
level-set based topology optimization approach and the
conformal mapping theory. A 2D metamaterial unit cell design
with tailored effective properties is first achieved using the
level-set based topology optimization scheme. After the free-
form object surface is subdivided into 3D quad mesh surfaces,
the conformal mapping from each 3D quad mesh surface to the
2D planar unit cell can be further calculated. Based on the
calculated conformal mapping, the metamaterial unit cell design
is aligned with the 3D quad mesh elements, to obtain the final
3D conformal metasurface, which acts as the input model for
additive manufacturing. The proposed framework (Fig. 2)
constitutes an automated process that begins with pre-specifying
the effective properties of the desired metamaterial design and
the 3D free-form surface and ends in a conformal metasurface
ready for 3D printing. It offers a direct coupling between
topology optimization and additive manufacturing and
alleviates the need for CAD reconstruction and further post-
processing work.
The paper is organized as follows: the background
regarding the level-set based topology optimization is presented
in the next Section, followed by an introduction to the theorem
and algorithms of conformal mapping. Later, the
implementation of the proposed 5-step procedure is presented,
accompanied by a demonstration example of mapping a 3D
human face with negative Poisson’s ratio metamaterial.
TOPOLOGY OPTIMIZATION Topology optimization [11] is a powerful computational
tool that has come to be an essential part of the design
innovation process. In topology optimization, the design
problem is recast as an optimal material distribution problem in
a specified design domain by optimizing an objective function
subject to different design constraints. During the last decades,
several topology optimization methods [12-14] have been
developed, including the Homogenization method [15, 16],
Solid Isotropic Material with Penalization (SIMP) [17],
Evolutionary [18], and Level-Set Methods [19-25]. In this
work, a level-set based topology optimization method is
employed for designing metamaterials. This alternative method
provides a clear description of the boundaries and a seamless
connection between the design and the fabrication process [26].
Figure 2. Computational framework for 3D free-form metasurfaces.

Accep
ted M
anus
cript
3 Copyright © 2017 by ASME
In level-set methods, the boundary of the design is
implicitly embedded by a level-set function Φ with one higher
dimension, as expressed in Eq. (1). The level-set function is
regularized to be a signed distance function. According to the
sign of the level set function, the computational domain can be
divided into areas of material and void, as expressed in Fig. 3.
, 0,
, 0,
, 0, \
x t x material
x t x boundary
x t x D void
(1)
Figure 3. Schematic 3D level set function with the
corresponding 2D geometry.
As a geometric model, level set methods not only provide a
clear representation of the boundary, but also embed higher
order geometric information, such as the normal vectors or
curvatures. Such information can be utilized to create a
seamless connection between the design and the fabrication
process [26]. This is important in the topology-optimization-
driven design innovation, where the organic conceptual design
often needs post processing and a CAD reconstruction before it
can be manufactured. In level set methods, the external surfaces
(boundaries) of a 3D object are defined by the zero level of a
continuous 4D level set function. The embedded information
can be extracted for STL file generation and further
manipulation, which is more suitable for 3D printing. The
isosurface, formed by the boundaries of the design, can be
transformed to a triangle mesh using Delaunay triangulation
[27]. Each triangular facet has three vertices and a normal
vector n, implied by the change of the level set function’s sign.
The data of all the facets must be stored in a file with STL
(Stereolithography) format, a standard format widely
recognized by the 3D printers and CAD software.
Figure 4. Extraction of geometric information from the level
set model.
The structural optimization procedure and the boundary
evolution of the design are based on the Hamilton-Jacobi
equation [19, 28]:
,
, (x) 0x t
x tt
V , (2)
where (x)dx
dtV is a design velocity field on the boundary.
To obtain a feasible steady-state solution to Eq. (2), a shape
sensitivity analysis need be performed to construct the design
velocity field for the design evolution. The Courant-Friedrichs-
Lewy (CFL) condition must be satisfied to maintain the
numerical stability when solving the Hamilton-Jacobi PDE [28,
29].
Topology optimization is an iterative process starting from
an initial level-set function. In this paper, a Finite Element
Analysis (FEA) is carried out each iteration under the plane
stress assumption, and the effective properties are calculated
using the strain energy method [30, 31]. Then, the design
velocity field is constructed following the steepest descent
method [23, 28], and the Hamilton-Jacobi equation is solved
using the upwind finite difference approach [24, 28]. At the end
of each iteration, the design evolves and acts as an input for the
next iteration. The detailed flowchart of the optimization is
presented in Fig. 5.

Accep
ted M
anus
cript
4 Copyright © 2017 by ASME
Figure 5. Flowchart of the level set based topology
optimization process.
CONFORMAL MAPPING Conformal mapping, also known as biholomorphic map, is
a transformation that can preserve the local angles [32]. In the
past few decades, conformal mapping has been widely
investigated and extensively applied in many engineering fields,
including global parameterization in computer graphics [33],
surface registration in computer vision [34], efficient routing in
sensor networks [35], and brain mapping in medical imaging
[36]. Stephenson [37] proposed a circle packing based method
to approximate conformal mappings between planar regions.
For a genus zero surface, Haker et al. [38] presented a
conformal mapping algorithm which maps the surface to a
sphere by solving a linear system. To map a multiply connected
mesh to the slit domain, Wang et al. [39] employed the
holomorphic 1-forms and applied this method to brain surface
parameterization.
More recently, Nasser [40] proposed a numerical
conformal mapping method for multiple connected regions onto
the second, third and four categories of Koebe's canonical slit
domains. Shi et al. [41] devised a novel conformal mapping
method to align anatomical features and reduce metric
distortion using Laplace-Beltrami eigenfunctions. Lately, Rorig
et al. [42] have employed a periodic conformal mapping
method for surfaces with cylinder topology which maps a
surface mesh to a cylinder or cone of revolution.
In this work, holomorphic differential 1-forms are utilized
to compute conformal mapping to transform the 2D
metamaterial design into a 3D free-form surface. Differential 1-
form based methods have been extensively employed in
numerous applications [43-47], such as vector fields
decomposition and surface parameterization. For
comprehensive reviews of a variety of conformal mapping
methods, readers are referred to [48, 49].
A conformal mapping between two surfaces preserves
angles. Suppose f:(M1,g1)(M2,g2) is a mapping between two
Riemann surfaces M1, M2 with Riemannian metrics g1, g2, and
the coordinate parameters of M1, M2 are (x,y), (u,v) respectively.
The pullback metric, induced by f, has the local representation:
*
2 2
, ,
, ,
T
u v u vf g g
x y x y
. (3)
The mapping f is called a conformal mapping if the
pullback metric induced by f satisfies:
* 2
2 1f g e g , (4)
where λ:M1ℝ is a function defined on M1, and e2λ is called the
conformal factor.
Two surfaces are conformally equivalent, if there exists a
conformal mapping between them. If two surfaces are
conformally equivalent, the conformal factor, which determines
Riemannian metric, can be employed to further differentiate
them. Let S be a genus zero surface with a single boundary and
four marked boundary points p1, p2, p3, p4 located counter-
clockwise. Such a surface is called a topological quadrilateral,
represented by Q(p1, p2, p3, p4). Following Riemann mapping
theorem, there exists a unique conformal mapping f, so it maps
Q(p1, p2, p3, p4) to a planar rectangle and f(p1)=0, f(p2)=1.
The ratio of height to width for the rectangle is called the
conformal module of Q(p1, p2, p3, p4). Conformal modules are
the complete invariant of the conformal structure. The concept
of the conformal module is illustrated in Fig. 6, where a human
face with four boundary corners, represented by a topological
quadrilateral, is conformally mapped to a planar rectangle.
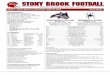
Figure 6. Conformal module of a topological quadrilateral:
(left) The original face surface with four marked boundary
corners, (middle) the planar rectangle which is the
conformal mapping result, and (right) the face surface with
the checkerboard texture pulled back from the one placed
on the planar checkerboard.

Accep
ted M
anus
cript
5 Copyright © 2017 by ASME
Holomorphic differential 1-form based conformal
mapping Given a Riemann surface S and a harmonic function
f:Sℝ. Suppose ω denotes a differential 1-form with the
representation fαdxα+gαdyα in the local coordinates (xα,,yα), and
fβdxβ+gβdyβ in the local coordinates (xβ,,yβ), so
a
a
x y
x x ff
ggx y
y y
. (5)
ω is a closed 1-form, if 0f g
y x
in each local
coordinate (xα,,yα). If a closed 1-form ω satisfies 0f g
x y
,
then ω is a harmonic 1-form. Hodge star operator * can
transform a differential 1-form ω to its conjugate *ω, which is
defined as:
* a a a ag dx f dy . (6)
A complex differential 1-form is a holomorphic 1-form if
and only if it can be decomposed into two harmonic 1-forms ω
and *ω which are conjugate to each other, and the holomorphic
1-form is written as:
1* . (7)
Suppose (S1,g) is a genus-zero surface with a single
boundary and Riemannian metric g. According to the conformal
mapping theory, the genus-zero surface S1 with a single
boundary can be conformally mapped to a planar rectangle Q1.
This conformal mapping algorithm starts with the computation
of harmonic 1-form basis ωi and its conjugate *ωi, where *
denotes the Hodge star operator. Then, the holomorphic 1-form
basis is computed as ωi+i*ωi. With the integration of
holomorphic 1-forms along the path in the primary domain 1S ,
the conformal mapping 1 1:f S Q is obtained. The detailed
conformal mapping algorithm is illustrated in Table 1.
Table 1. Algorithm 1: Conformal Mapping.
Algorithm 1: Conformal Mapping
Input: A triangle mesh 1S of genus zero with a single boundary.
Output: A conformal mapping 1 1:f S Q , where 1Q is a planar
rectangle.
1: Compute a harmonic 1-form basis of 1 1 2, { , }S .
2: For a harmonic 1-form i , compute its conjugate * i .
3: Compute the holomorphic 1-form base by 1*i i .
4: Repeat step 2 through step 3 until all the harmonic 1-forms i
in the set are processed.
5: Slice 1S along the cut graph of 1S to obtain a fundamental
domain 1S .
6: Select a root vertex 0 1S , and integrate the holomorphic 1-
form i along the path i from 0 to arbitrary vertex i during
breadth-first traversal to obtain ( )i
if
.
7: The conformal mapping is given by 1 1:f S Q after above
integration is completed.
Aligning unit cells with quadrilaterals in 3D quad
mesh surface
The algorithm for aligning unit cells with quadrilaterals in
3D quad mesh surface mainly employs the conformal mapping
between the 3D surface with a 2D planar rectangle and the
Barycentric interpolation method. Based on the conformal
mapping result, each triangle mesh unit cell C is firstly placed
into the quadrilateral in planar quad mesh rectangle Q2, and
then transformed and aligned with the quadrilateral in 3D quad
mesh surface S2 using Barycentric interpolation. The final
designed surface for 3D printing comprises a set of connected
triangle mesh unit cells. The detailed algorithm is given in Table
2.
Table 2. Algorithm 2: Alignment of Unit Cells with
Quadrilaterals.
Algorithm 2: Alignment of Unit Cells with Quadrilaterals
Input: A 3D quad mesh surface 2S of genus zero with a single
boundary, a planar quad mesh rectangle 2Q , and a triangle mesh
unit cell C with its facet parallel to yz-plane and x coordinate
starting from 0.
Output: A 3D surface input model 3S for 3D printing comprising
a set of connected triangle mesh unit cells.
1: Create a new copy of the triangle mesh unit cell C .
2: Project each vertex i of C on the yz-plane, and save its x
coordinate value as height ih . The resulting unit cell is denoted as
prC .
3: Scale and place prC into a quadrilateral in planar quad mesh
rectangle 2Q .
4: Using Barycentric interpolation method, compute the new
position of each vertex i of prC , which will be placed into the
corresponding quadrilateral of 3D quad mesh surface 2S .
5: Lift each vertex of prC on the quadrilateral of 3D quad mesh
surface 2S by the height ih along the vertex normal direction to
recover its 3D unit cell structure. The resulting unit cell is then
represented by lftC .
6: Repeat step 1 through step 5 until all the quadrilaterals of 3D
quad mesh surface 2S are aligned with the triangle mesh unit cell
lftC .
7: The 3D surface input model 3S for 3D printing is given by such
a set of connected triangle mesh unit cells lftC .

Accep
ted M
anus
cript
6 Copyright © 2017 by ASME
NUMERICAL IMPLEMENTATION AND
DEMONSTRATION EXAMPLE In this Section, the proposed method will be illustrated
through a demonstration example. The schematic representation
of the computational method is shown in Fig. 2. The proposed
computational framework comprises five steps that can be
summarized as follows, and the algorithm is presented in Table
3.
Design a metamaterial unit cell model: Designing the
metamaterial using a level-set based topology optimization
method. The designed unit cell serves as a constitutive element
for mapping onto the surface model.
Conformally map the 3D triangle mesh surface S1 to a 2D
triangle mesh rectangle Q1: Under Riemann mapping theorem,
for any topological quadrilateral surface S1, there exists a
conformal mapping which maps S1 to a planar rectangle Q1.
Construct a conformal mapping between a 3D quad mesh
surface S2 and a 2D quad mesh rectangle Q2: With the
conformal mapping between two triangle meshes, a conformal
mapping between a 3D quad mesh surface S2 and a 2D quad
mesh rectangle Q2 is achieved utilizing the Barycentric
interpolation method.
Align each triangle mesh of the unit cell C with the
quadrilateral in the 3D quad mesh surface S2: To this end, an
algorithm has been created, so the resulting connected unit cells
form a 3D surface input model S3 for 3D printing.
3D Print the surface model S3: All the unit cells that
compose the model S3 are assembled into one piece, and the
data are stored in an STL file for 3D printing.
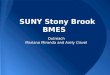
Figure 7. Notation of surfaces throughout the process: 3D
triangle mesh surface S1, 3D Quad mesh surface S2, 3D
surface model S3, 2D triangle mesh rectangle Q1, 2D quad
mesh rectangle Q2.
Table 3. Algorithm 3: A Novel Framework for Conformal
Metasurfaces.
Algorithm 3: A Novel Framework for Conformal Metasurfaces
Input: A triangle mesh surface 1S of genus zero with a single
boundary, and target properties of the desired metamaterial design.
Output: A 3D printed surface 3S .
1: Design a metamaterial unit cell with the desired effective
properties.
2: Compute a conformal mapping from the triangle mesh surface
1S to a planar rectangle 1Q using Algorithm 1.
3: Based on triangle mesh surface 1S and planar rectangle 1Q ,
calculate the corresponding 3D quad mesh surface 2S and 2D
quad mesh rectangle 2Q using Barycentric interpolation method.
4: Align each copy of triangle mesh unit cell C with the
quadrilateral in the 3D quad mesh surface 2S using Algorithm 2,
so a 3D surface input model 3S for 3D printing comprising a set of
connected triangle mesh unit cells is obtained.
5: 3D print the surface model 3S .
Designing the metamaterial through level-set based
topology optimization methods
After the effective properties of the desired metamaterial
have been specified, the optimization process, detailed earlier,
is adopted. The result of the topology optimization process is a
unit cell design which will act as an input for the conformal
mapping. In this work, a 2D negative Poisson’s ratio
metamaterial design (or auxetics) is selected for optimization
and will finally be mapped on a 3D face. The characteristic
behavior of negative-Poisson’s-ratio (NPR) materials is that, in
contrast to ordinary materials, when compressed NPR materials
contract in the perpendicular direction.
One way to formulate the problem for auxetic metamaterial
design is to express it as a least square optimization problem,
minimizing the difference between the effective properties of
the design Eff
ijklC and the design objectives *
ijklC for the entries of
the elasticity matrix for orthotropic materials:
Minimize: 2
, , , 1
1
2
dEff
ijkl ijkl ijkl
i j k l
J w C C
(8)
Subject to:
0
,
T
ij ijkl kl ij ijkl klD D
u C v H d C v H d
V V
(9)
where d denotes the dimension of the problem (2D or 3D), and
wijkl is the weighting factor for each elasticity tensor. H(ϕ) is the
Heaviside function, D the computational domain, V(Ω) is the
volume of the unit cell, and V* is the volume target.
The volume target of the design has been selected to be
40%, and the targeted effective properties are set as

Accep
ted M
anus
cript
7 Copyright © 2017 by ASME
C*1111=0.2GPa, C*
2222=0.2GPa, and C*1122=-0.08GPa, driving
to a design with Poisson’s ratio ν=-0.4. The weight factors for
Eq. (8) are w1111=0.5, w2222=0.5, and w1122=5, and the
constitutive material’s Young’s modulus is E=0.91GPa. The
void is represented by a dummy material with Evoid=10-6GPa, to
avoid singularity in finite element analysis.
The design evolution history with the objective function
and the effective properties of the unit cell can be found in Fig.
8 and 9, respectively. In Table 4, the unit cell design has been
assembled to a 4x4 metastructure, and a prototype has been
fabricated. The effective elastic properties indicate a
metastructure with Poisson’s ratio ν=-0.38. More details about
constructing the design velocity field and implementing the
negative Poisson’s ratio problem can be found in [31], where
results have been numerically verified and experimentally
validated.
At the end of the optimization, the unit cell design is
implicitly described by a level-set function Φ. In the
demonstration, the obtained metamaterial is 2D, which can be
further extruded to obtain a 3D structure (2.5D). If a 3D
topology optimization is followed, the result would be a 3D
metamaterial with specific effective properties. Either way, the
design must be translated into a triangle mesh so the
communication between all the steps can be possible [50]. The
design, now, is a set of triangular facets described by three
vertices for the points and one normal vector, each.
Figure 8. Design evolution during topology optimization.
Figure 9. Target properties C* and effective properties CEff
during topology optimization.
Table 4. 4x4 periodically assembled unit cells, and
corresponding elasticity matrix.
Unit Cell 4x4 metastructure
4x4 printed prototype Elasticity matrix
0.200 0.076 0
0.076 0.200 0
0 0 0.038
EffC
3D printing of the conformal metasurface
The original unit cell design consists of a triangle mesh of
373,416 triangles. The number of the triangles has remained
unchanged during the one-to-one mapping of the unit cell to
each quadrilateral. After the successful conformal mapping of
the unit cell onto the surface through algorithms 1 and 2, the
final design comprises a group of cells from the same original
unit cell. Each cell has a varied design and locates at a different
position on the surface. All the individual meshes must go
through a Boolean operation that unites them into a single
layout. The unified design, described by the vertices and normal
vector for each triangular facet is stored in an STL file for
additive manufacturing. For convenience, the triangle mesh of
the unified design has been refined to become manageable for
3D printing. Part of the design can be seen with the original
triangle mesh in Fig. 10, and after the refinement in Fig. 11.
The process has been applied to a 3D human face design,
obtained through 3D scanning, with two quad mesh size. In the
first example (Fig. 12), the surface has been discretized into a
15x14 quad mesh (original number of triangles: 78,000,000,
after refinement: 3,200,000), and the design was fabricated
using a state-of-the-art 3D printer (Objet260 Connex, Stratasys
Ltd) with a flexible digital material (40% VeroWhite and 60%
TangoPlus). The second example (Fig. 13) has a denser mesh
(31x28) (original number of triangles: 320,000,000, after
refinement: 2,000,000), and it has been fabricated using a
desktop 3D printer with ABS plastic. The size of the unit cell of
the current examples is, for a better demonstration, relatively
large. For more demanding applications, a high-resolution 3D
printer enables the realization of conformal metastructures with
a smaller in size metamaterial unit cell, as a constitutive
element.

Accep
ted M
anus
cript
8 Copyright © 2017 by ASME
Figure 10. Part of the design with the original triangle
mesh.
Figure 11. Part of the design with refined triangle mesh.
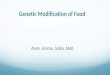
Figure 12. First human face example with 15x14 quad
mesh: a) 3D triangle mesh surface of human face S1, b) 3D
quad mesh surface S2, c) unified 3D surface model S3, and d)
3D printed prototype.
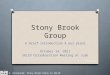
Figure 13. Second human face example with 31x28 quad
mesh: a) 3D triangle mesh surface of human face S1, b) 3D
quad mesh surface S2, c) unified 3D surface model S3, and d)
3D printed prototype.
CONCLUSION In this paper, we present a computational framework to
address key issue in computational design and additive
manufacturing of spatial free-form periodic metasurfaces,
including how to create a metamaterial design with tailored
effective properties through level-set based topology
optimization method; how to map the design to a 3D free-form
surface with the local shape preserved by synthesizing the
information from the geometric level set model and conformal
mapping; and how to generate the conformal metasurface with
consideration of the file format for additive manufacturing. The
proposed method is validated through a demonstration example
of a metasurface with NPR unit cells. An issue we found in our
study is that some unit cells are highly distorted compared to
the original design at the spots where the surface curvatures are
high. The effective mechanical properties of such unit cells
might differ greatly from the desired properties. This problem is
alleviated by subdividing the surface with smaller quad mesh Q,
which can better preserve their original shapes of the unit cells.
Future applications may include customizable designs based on
a wide database of metamaterials, ready to be utilized in
complicated designs to achieve the desired performance.
Potential applications of the proposed method to designing
artistic and functional structures are to be explored soon.
ACKNOWLEDGMENTS This research was supported by the National Science
Foundation (CMMI1462270), the Region 2 University
Transportation Research Center (UTRC), the unrestricted grant
from Ford Research & Advanced Engineering, and the start-up
funds from the State University of New York at Stony Brook.
The authors thank Mr. Cui Xiao for his contribution at the early
stage of this research.

Accep
ted M
anus
cript
9 Copyright © 2017 by ASME
REFERENCES [1] Diaz, A. R., and Sigmund, O., 2010, "A topology
optimization method for design of negative permeability
metamaterials," Structural and Multidisciplinary Optimization,
41(2), pp. 163-177.
[2] Babaee, S., Shim, J., Weaver, J. C., Chen, E. R., Patel, N.,
and Bertoldi, K., 2013, "3D Soft metamaterials with negative
Poisson's ratio," Advanced Materials, 25(36), pp. 5044-5049.
[3] Andreassen, E., Lazarov, B. S., and Sigmund, O., 2014,
"Design of manufacturable 3D extremal elastic microstructure,"
Mechanics of Materials, 69(1), pp. 1-10.
[4] Clausen, A., Wang, F., Jensen, J. S., Sigmund, O., and
Lewis, J. A., 2015, "Topology optimized architectures with
programmable Poisson's ratio over large deformations,"
Advanced Materials, 27(37), pp. 5523-5527.
[5] Wang, H., and Rosen, D. W., "Parametric modeling method
for truss structures," Proc. ASME 2002 International Design
Engineering Technical Conferences and Computers and
Information in Engineering Conference, American Society of
Mechanical Engineers, pp. 759-767.
[6] Chu, C., Graf, G., and Rosen, D. W., 2008, "Design for
additive manufacturing of cellular structures," Computer-Aided
Design and Applications, 5(5), pp. 686-696.
[7] Jang, Y., Yoo, M., and Lim, S., 2013, "Conformal
metamaterial absorber for curved surface," Optics express,
21(20), pp. 24163-24170.
[8] Adams, J. J., Duoss, E. B., Malkowski, T. F., Motala, M. J.,
Ahn, B. Y., Nuzzo, R. G., Bernhard, J. T., and Lewis, J. A.,
2011, "Conformal Printing of Electrically Small Antennas on
Three‐Dimensional Surfaces," Advanced Materials, 23(11), pp.
1335-1340.
[9] Xia, Z., Zhang, Y., and Ellyin, F., 2003, "A unified
periodical boundary conditions for representative volume
elements of composites and applications," International Journal
of Solids and Structures, 40(8), pp. 1907-1921.
[10] Javid, F., Liu, J., Shim, J., Weaver, J. C., Shanian, A., and
Bertoldi, K., 2016, "Mechanics of instability-induced pattern
transformations in elastomeric porous cylinders," Journal of the
Mechanics and Physics of Solids, 96, pp. 1-17.
[11] Bendsoe, M. P., and Sigmund, O., 2003, Topology
optimization: theory, methods and applications, Springer.
[12] Eschenauer, H. A., and Olhoff, N., 2001, "Topology
optimization of continuum structures: a review," Applied
Mechanics Reviews, 54(4), pp. 331-390.
[13] Rozvany, G., 2001, "Aims, scope, methods, history and
unified terminology of computer-aided topology optimization in
structural mechanics," Structural and Multidisciplinary
Optimization, 21(2), pp. 90-108.
[14] Sigmund, O., and Maute, K., 2013, "Topology
optimization approaches," Structural and Multidisciplinary
Optimization, 48(6), pp. 1031-1055.
[15] Bendsøe, M. P., and Kikuchi, N., 1988, "Generating
optimal topologies in structural design using a homogenization
method," Computer methods in applied mechanics and
engineering, 71(2), pp. 197-224.
[16] Suzuki, K., and Kikuchi, N., 1991, "A homogenization
method for shape and topology optimization," Computer
methods in applied mechanics and engineering, 93(3), pp. 291-
318.
[17] Bendsøe, M. P., 1989, "Optimal shape design as a material
distribution problem," Structural optimization, 1(4), pp. 193-
202.
[18] Xie, Y. M., and Steven, G. P., 1993, "A simple evolutionary
procedure for structural optimization," Computers & structures,
49(5), pp. 885-896.
[19] Osher, S., and Sethian, J. A., 1988, "Fronts propagating
with curvature-dependent speed: algorithms based on Hamilton-
Jacobi formulations," Journal of computational physics, 79(1),
pp. 12-49.
[20] Sethian, J. A., and Wiegmann, A., 2000, "Structural
boundary design via level set and immersed interface methods,"
Journal of computational physics, 163(2), pp. 489-528.
[21] Osher, S. J., and Santosa, F., 2001, "Level set methods for
optimization problems involving geometry and constraints: I.
Frequencies of a two-density inhomogeneous drum," Journal of
Computational Physics, 171(1), pp. 272-288.
[22] Allaire, G., Jouve, F., and Toader, A.-M., 2002, "A level-set
method for shape optimization," Comptes Rendus
Mathematique, 334(12), pp. 1125-1130.
[23] Wang, M. Y., Wang, X., and Guo, D., 2003, "A level set
method for structural topology optimization," Computer
methods in applied mechanics and engineering, 192(1), pp.
227-246.
[24] Allaire, G., Jouve, F., and Toader, A.-M., 2004, "Structural
optimization using sensitivity analysis and a level-set method,"
Journal of computational physics, 194(1), pp. 363-393.
[25] Wang, M. Y., and Wang, X., 2004, "PDE-driven level sets,
shape sensitivity and curvature flow for structural topology
optimization," Computer Modeling in Engineering and
Sciences, 6, pp. 373-396.
[26] Vogiatzis, P., Chen, S., and Zhou, C., "A MATLAB Code
for Integrated Additive Manufacturing and Level-Set Based
Topology Optimization," Proc. ASME 2016 International
Design Engineering Technical Conferences and Computers and
Information in Engineering Conference, American Society of
Mechanical Engineers, pp. V02BT03A016-V002BT003A016.
[27] Shewchuk, J. R., 1996, "Triangle: Engineering a 2D
quality mesh generator and Delaunay triangulator," Applied
computational geometry towards geometric engineering,
Springer, pp. 203-222.
[28] Osher, S., and Fedkiw, R., 2006, Level set methods and
dynamic implicit surfaces, Springer Science & Business Media.
[29] Sethian, J. A., 1999, Level set methods and fast marching
methods: evolving interfaces in computational geometry, fluid
mechanics, computer vision, and materials science, Cambridge
university press.
[30] Zhang, W., Dai, G., Wang, F., Sun, S., and Bassir, H., 2007,
"Using strain energy-based prediction of effective elastic
properties in topology optimization of material
microstructures," Acta Mechanica Sinica, 23(1), pp. 77-89.

Accep
ted M
anus
cript
10 Copyright © 2017 by ASME
[31] Vogiatzis, P., Chen, S., Wang, X., Li, T., and Wang, L.,
2017, "Topology optimization of multi-material negative
Poisson’s ratio metamaterials using a reconciled level set
method," Computer-Aided Design, 83, pp. 15-32.
[32] Ahlfors, L. V., 2010, Conformal invariants: topics in
geometric function theory, American Mathematical Soc.
[33] Gu, X., and Yau, S.-T., "Global conformal surface
parameterization," Proc. Proceedings of the 2003
Eurographics/ACM SIGGRAPH symposium on Geometry
processing, Eurographics Association, pp. 127-137.
[34] Zeng, W., and Gu, X. D., "Surface matching and
registration using symmetric conformal mapping," Proc.
Computer-Aided Design and Computer Graphics, 2009.
CAD/Graphics' 09. 11th IEEE International Conference on,
IEEE, pp. 249-254.
[35] Sarkar, R., Yin, X., Gao, J., Luo, F., and Gu, X. D.,
"Greedy routing with guaranteed delivery using ricci flows,"
Proc. Information Processing in Sensor Networks, 2009. IPSN
2009. International Conference on, IEEE, pp. 121-132.
[36] Gu, X., Wang, Y., Chan, T. F., Thompson, P. M., and Yau,
S.-T., 2004, "Genus zero surface conformal mapping and its
application to brain surface mapping," IEEE Transactions on
Medical Imaging, 23(8), pp. 949-958.
[37] Stephenson, K., 1999, "The approximation of conformal
structures via circle packing," Series in Approximations and
decompositions, 11, pp. 551-582.
[38] Haker, S., Angenent, S., Tannenbaum, A. R., Kikinis, R.,
Sapiro, G., and Halle, M., 2000, "Conformal surface
parameterization for texture mapping," IEEE Transactions on
Visualization and Computer Graphics, 6(2), pp. 181–189.
[39] Wang, Y., Gu, X., Chan, T. F., Thompson, P. M., and Yau,
S.-T., 2008, "Conformal slit mapping and its applications to
brain surface parameterization," Proc. International Conference
on Medical Image Computing and Computer-Assisted
Intervention, Springer, pp. 585-593.
[40] Nasser, M. M., 2011, "Numerical conformal mapping of
multiply connected regions onto the second, third and fourth
categories of Koebeʼs canonical slit domains," Journal of
Mathematical Analysis and Applications, 382(1), pp. 47-56.
[41] Shi, Y., Lai, R., and Toga, A. W., 2013, "Conformal
mapping via metric optimization with application for cortical
label fusion," Proc. International Conference on Information
Processing in Medical Imaging, Springer, pp. 244-255.
[42] Rörig, T., Sechelmann, S., Kycia, A., and Fleischmann, M.,
2015, "Surface Panelization Using Periodic Conformal Maps,"
Advances in Architectural Geometry 2014, Springer, pp. 199-
214.
[43] Tong, Y., Lombeyda, S., Hirani, A. N., and Desbrun, M.,
2003, "Discrete multiscale vector field decomposition," Proc.
ACM transactions on graphics (TOG), ACM, pp. 445-452.
[44] Gortler, S. J., Gotsman, C., and Thurston, D., 2006,
"Discrete one-forms on meshes and applications to 3D mesh
parameterization," Computer Aided Geometric Design, 23(2),
pp. 83-112.
[45] Tong, Y., Alliez, P., Cohen-Steiner, D., and Desbrun, M.,
2006, "Designing quadrangulations with discrete harmonic
forms," Proc. Eurographics Symposium on Geometry
Processing, pp. 1-10.
[46] Kälberer, F., Nieser, M., and Polthier, K., 2007,
"QuadCover‐Surface Parameterization using Branched
Coverings," Proc. Computer Graphics Forum, Wiley Online
Library, pp. 375-384.
[47] Fisher, M., Schröder, P., Desbrun, M., and Hoppe, H.,
2007, "Design of tangent vector fields," Proc. ACM
transactions on graphics (TOG), ACM, p. 56.
[48] Floater, M. S., and Hormann, K., 2005, "Surface
parameterization: a tutorial and survey," Advances in
multiresolution for geometric modelling, Springer, pp. 157-186.
[49] Sheffer, A., Praun, E., and Rose, K., 2006, "Mesh
parameterization methods and their applications," Foundations
and Trends® in Computer Graphics and Vision, 2(2), pp. 105-
171.
[50] Vogiatzis, P., Chen, S., and Zhou, C., in print, "An open
source framework for integrated additive manufacturing and
level-set based topology optimization," Journal of Computing
and Information Science in Engineering.