Embed Size (px)
Citation preview
Inertial Navigation
Academic Year 2008/09
Master of Science in Computer Engineering,Environmental and Land Planning Engineering
Inertial navigation
• Reference systems
• Inertial sensors
• Navigation equations
• Error budget
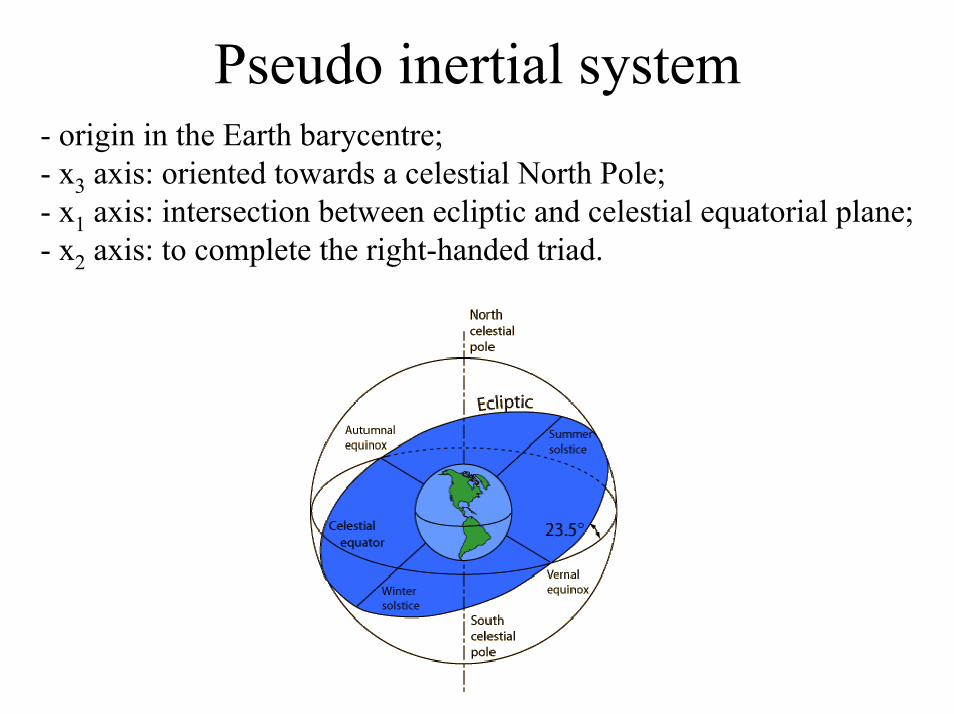
Pseudo inertial system- origin in the Earth barycentre;- x3 axis: oriented towards a celestial North Pole;- x1 axis: intersection between ecliptic and celestial equatorial plane;- x2 axis: to complete the right-handed triad.
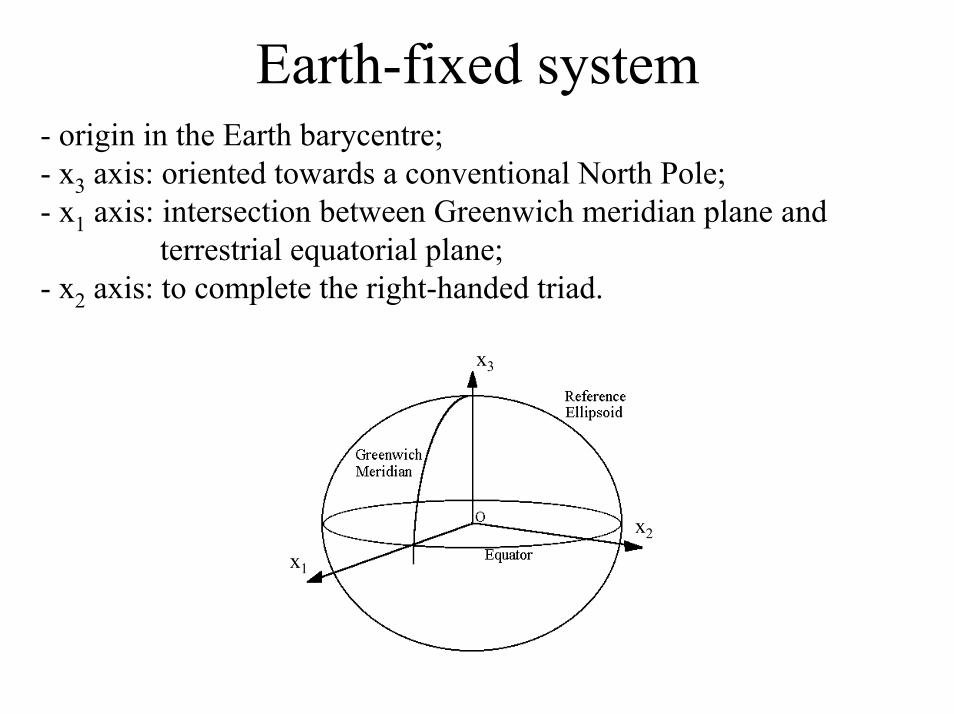
Earth-fixed system- origin in the Earth barycentre;- x3 axis: oriented towards a conventional North Pole;- x1 axis: intersection between Greenwich meridian plane and
terrestrial equatorial plane;- x2 axis: to complete the right-handed triad.
x1
x2
x3
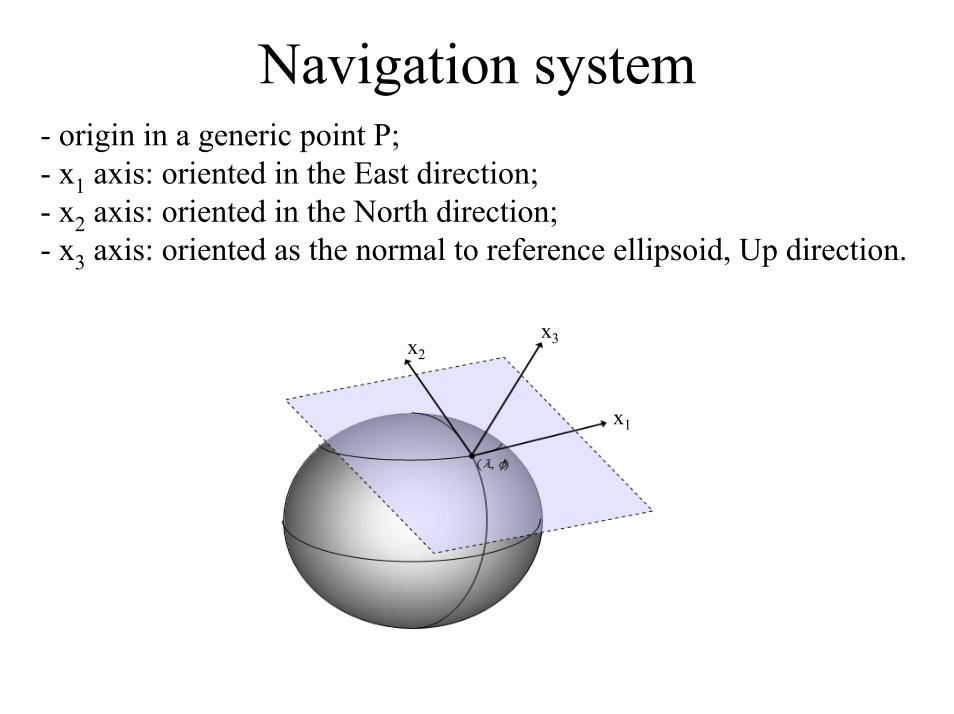
Navigation system- origin in a generic point P;- x1 axis: oriented in the East direction;- x2 axis: oriented in the North direction;- x3 axis: oriented as the normal to reference ellipsoid, Up direction.
x1
x2x3
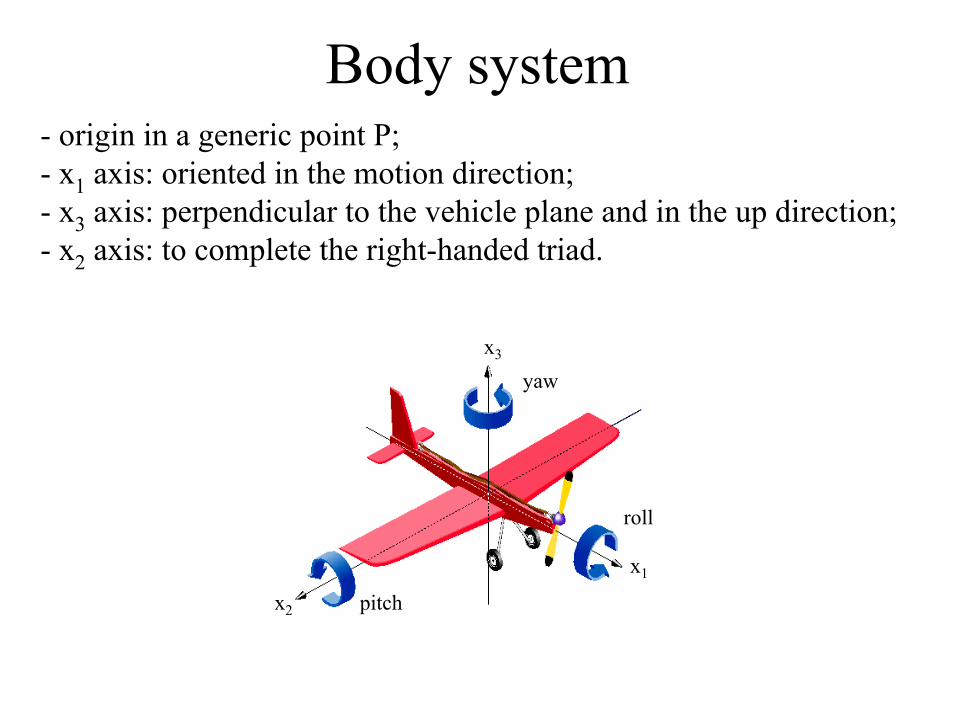
Body system- origin in a generic point P;- x1 axis: oriented in the motion direction;- x3 axis: perpendicular to the vehicle plane and in the up direction;- x2 axis: to complete the right-handed triad.
x2
x1
x3
yaw
roll
pitch
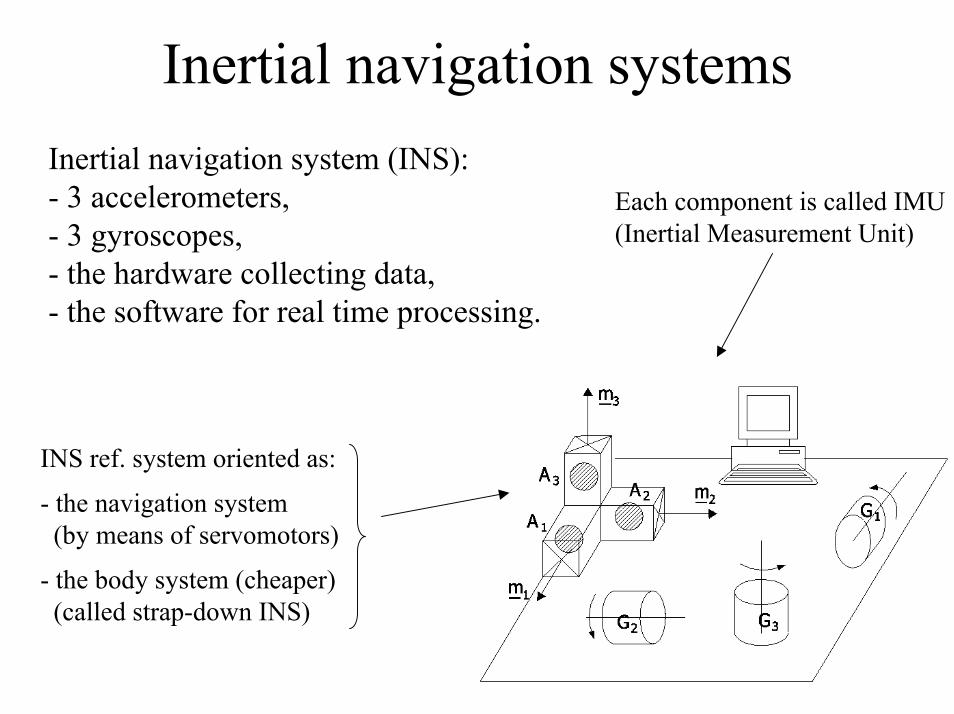
Inertial navigation systemsInertial navigation system (INS):- 3 accelerometers,- 3 gyroscopes,- the hardware collecting data,- the software for real time processing.
Each component is called IMU (Inertial Measurement Unit)
INS ref. system oriented as:
- the navigation system(by means of servomotors)
- the body system (cheaper)(called strap-down INS)
AccelerometersThe basic principle of accelerometers is to measure the forces acting on a proof mass.
Two types of accelerometers:
- open loop (e.g. spring based accelerometers)measure the displacement of the proof mass resulting from external forces acting on the sensor.
- closed loop (e.g. pendulous or electrostatic accelerometers)keep the proof mass in a state of equilibrium by generating a force that is opposite to the applied force.
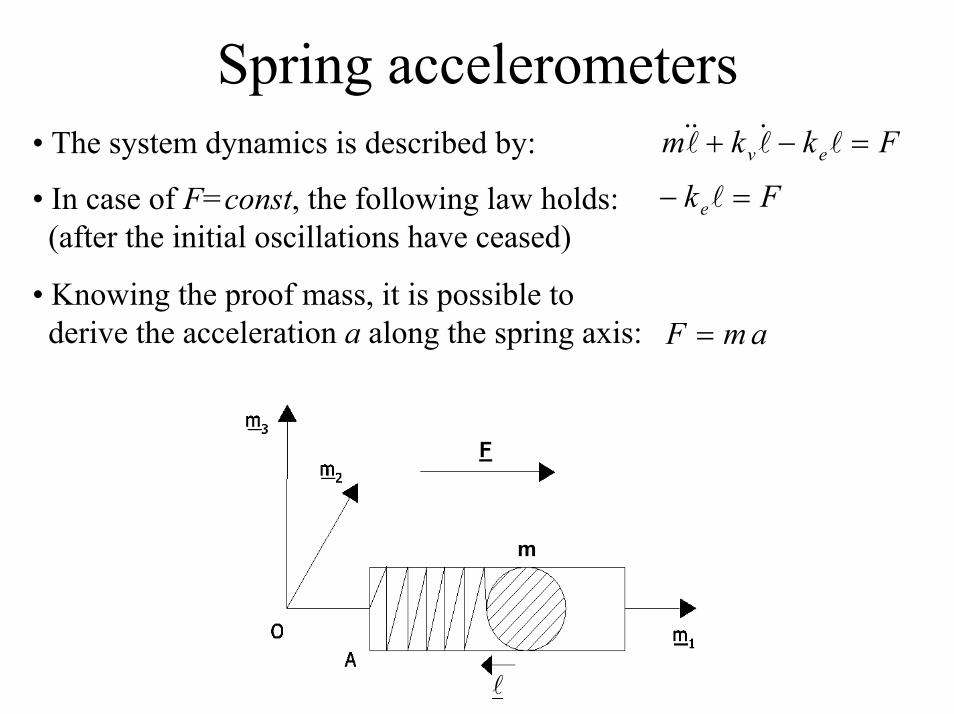
Spring accelerometers• The system dynamics is described by: Fkkm ev =−+ ll&l&&
• In case of F=const, the following law holds:(after the initial oscillations have ceased)
Fke =− l
• Knowing the proof mass, it is possible to derive the acceleration a along the spring axis: amF =
F
l
m
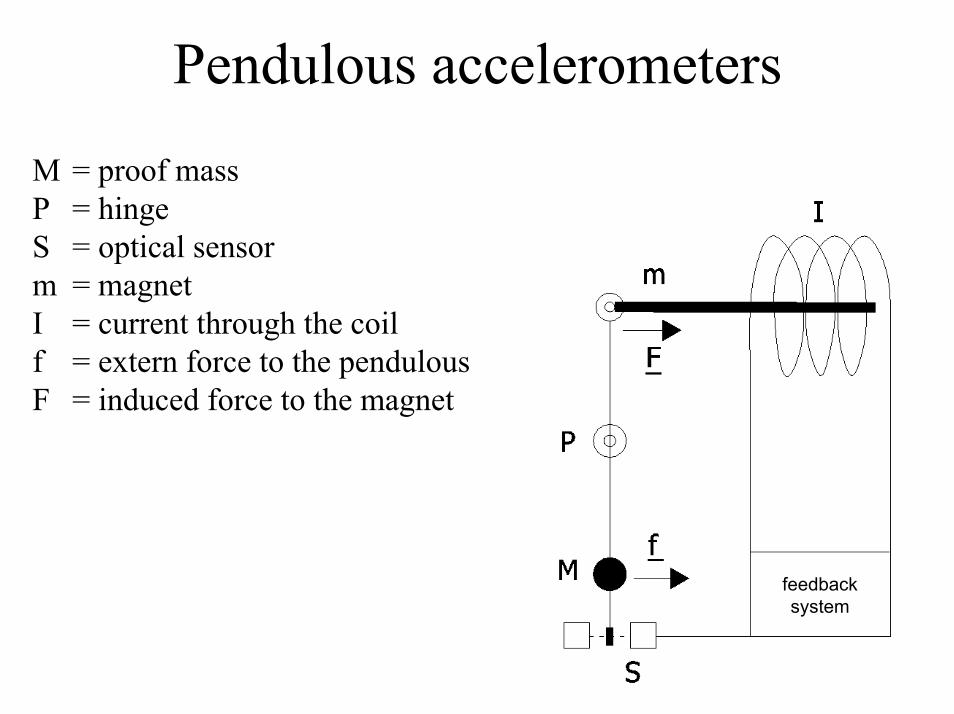
Pendulous accelerometers
M = proof massP = hingeS = optical sensorm = magnetI = current through the coilf = extern force to the pendulousF = induced force to the magnet
feedback system
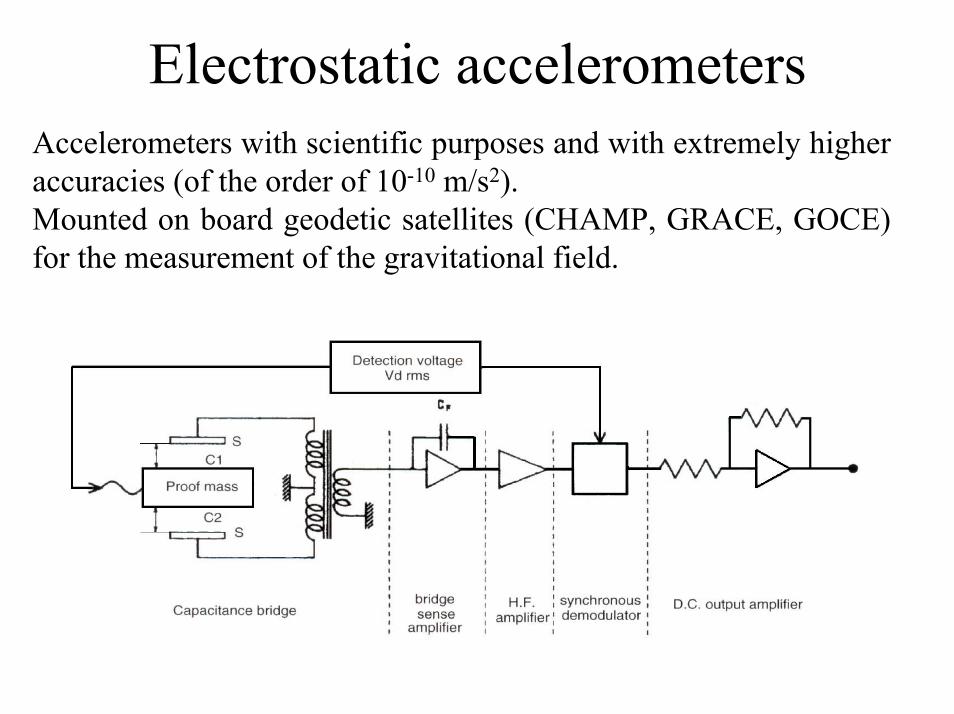
Electrostatic accelerometersAccelerometers with scientific purposes and with extremely higher accuracies (of the order of 10-10 m/s2).Mounted on board geodetic satellites (CHAMP, GRACE, GOCE) for the measurement of the gravitational field.
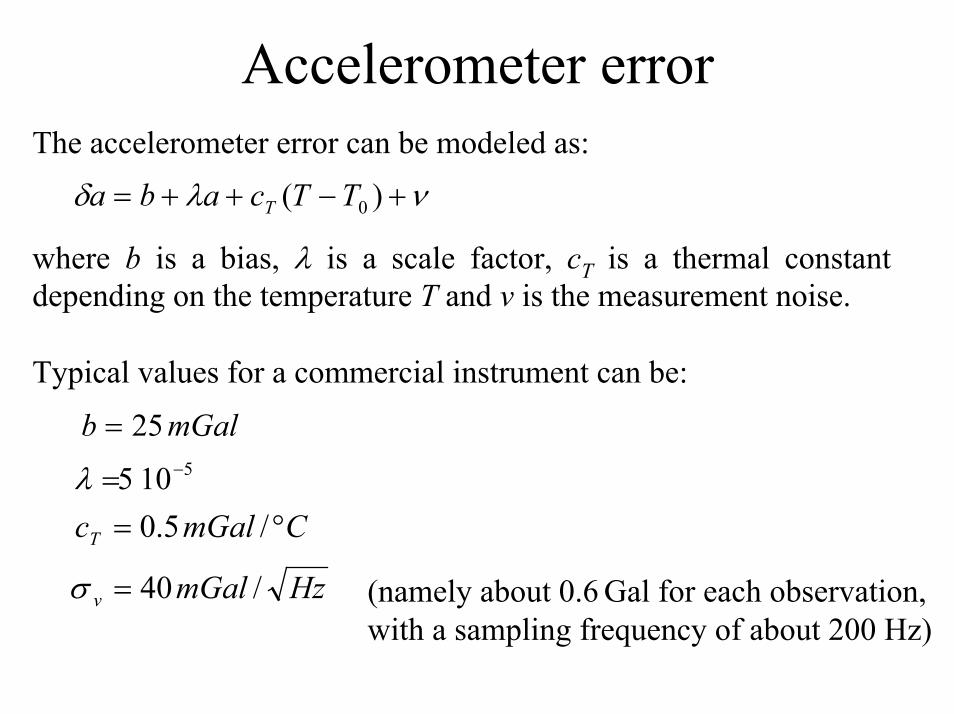
Accelerometer error
νλδ +−++= )( 0TTcaba T
The accelerometer error can be modeled as:
where b is a bias, λ is a scale factor, cT is a thermal constant depending on the temperature T and v is the measurement noise.
Typical values for a commercial instrument can be:
mGalb 25=5105 −=λ
CmGalcT °= /5.0
HzmGalv /40=σ (namely about 0.6 Gal for each observation, with a sampling frequency of about 200 Hz)
GyroscopesGyroscopes (or briefly gyros) measure the angular rate of the sensor rotation with respect to an inertial reference system.
Two main types of gyroscopes:
- mechanical(more expensive, suitable for gimbaled platforms)
- optical(cheaper, miniaturizable,only for strapdown systems)
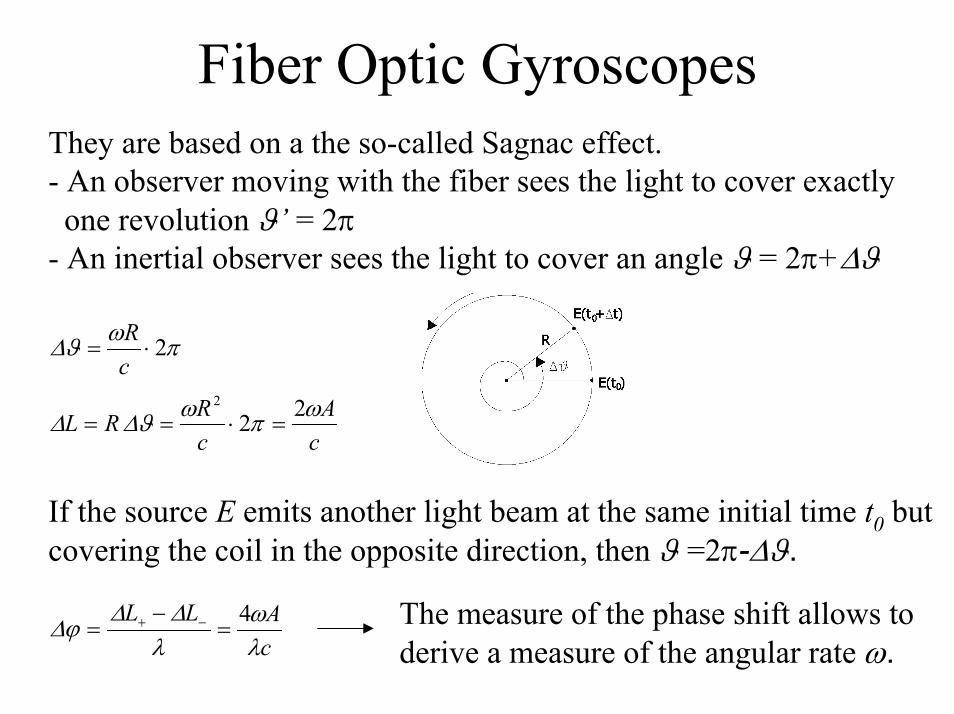
Fiber Optic GyroscopesThey are based on a the so-called Sagnac effect.- An observer moving with the fiber sees the light to cover exactly one revolution ϑ’ = 2π
- An inertial observer sees the light to cover an angle ϑ = 2π+∆ϑ
πωϑ∆ 2⋅=cR
cA
cRRL ωπωϑ∆∆ 22
2
=⋅==
If the source E emits another light beam at the same initial time t0 but covering the coil in the opposite direction, then ϑ =2π-∆ϑ.
The measure of the phase shift allows to derive a measure of the angular rate ω. c
ALLλω
λ∆∆
ϕ∆ 4=
−= −+
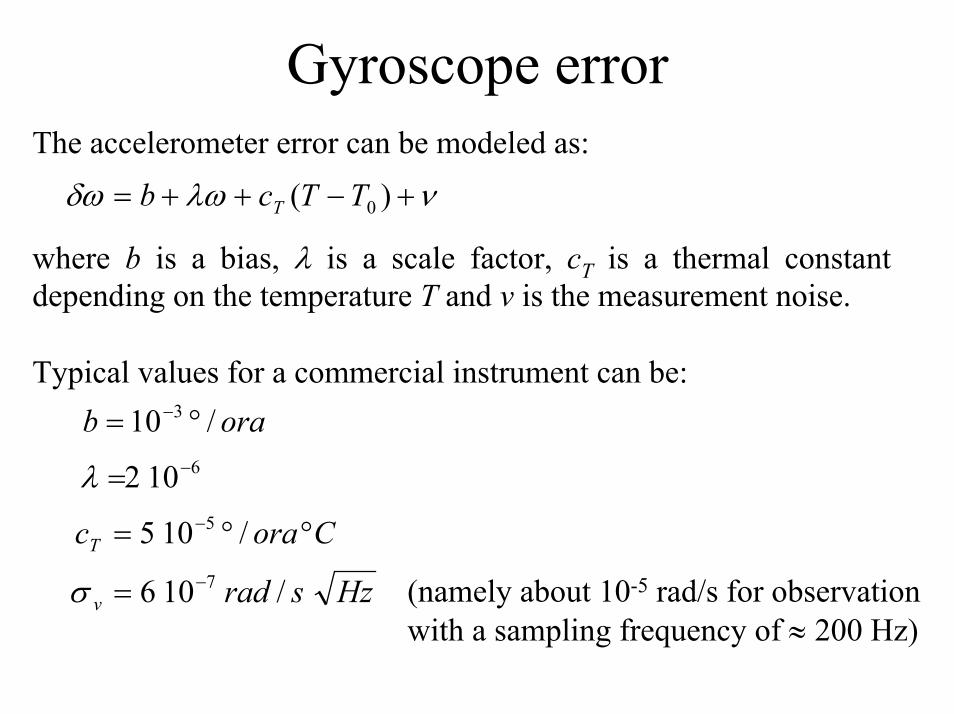
Gyroscope errorThe accelerometer error can be modeled as:
where b is a bias, λ is a scale factor, cT is a thermal constant depending on the temperature T and v is the measurement noise.
Typical values for a commercial instrument can be:
νλωδω +−++= )( 0TTcb T
orab /10 3 °= −
6102 −=λ
CoracT °°= − /105 5
(namely about 10-5 rad/s for observation with a sampling frequency of ≈ 200 Hz)
Hzsradv /106 7−=σ
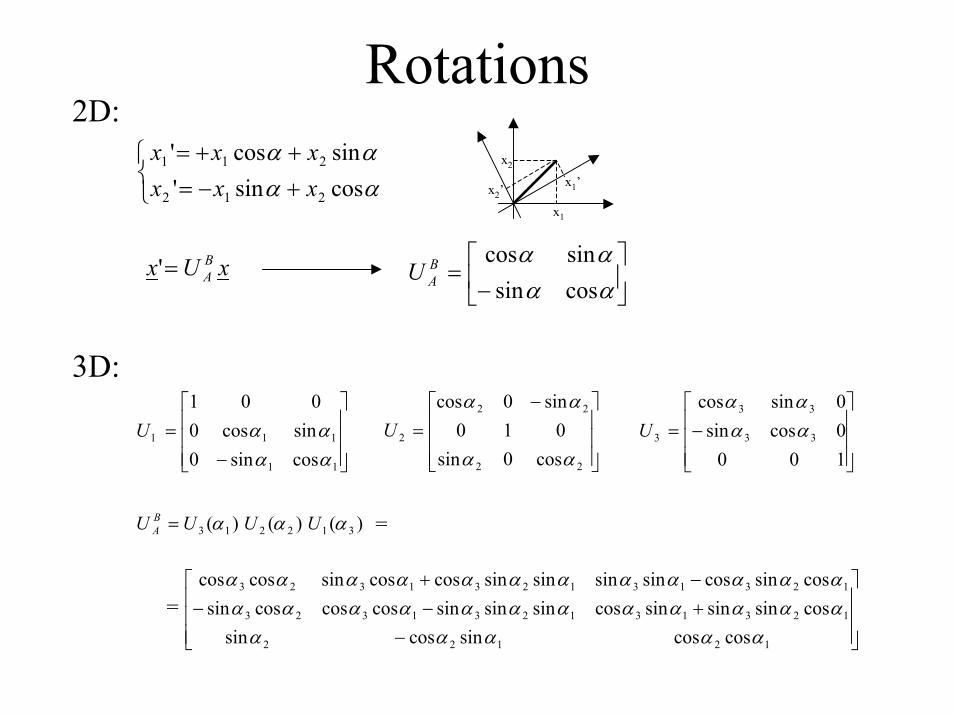
Rotations2D:
x1
x2
x1’x2’
+−=++=
αααα
cossin'sincos'
212
211
xxxxxx
−
=αααα
cossinsincosB
AUxUx BA='
3D:
−=
22
22
2
cos0sin010
sin0cos
αα
ααU
−=
11
111
cossin0sincos0
001
ααααU
−=
1000cossin0sincos
33
33
3 αααα
U
=)()()( 312213 ααα UUUU BA =
−+−−−+
12122
123131231323
123131231323
coscossincossincossinsinsincossinsinsincoscoscossincossincossinsinsinsincoscossincoscos
ααααααααααααααααααααααααααααα
=
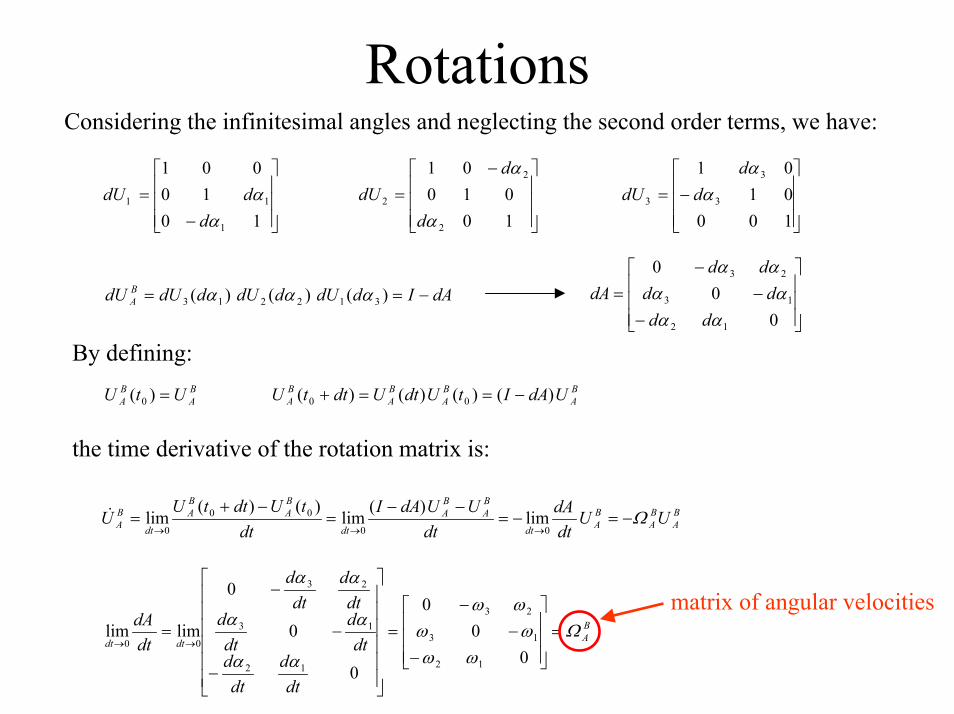
RotationsConsidering the infinitesimal angles and neglecting the second order terms, we have:
−=
1000101
3
3
3 αα
dd
dU
−=
10010
01
2
2
2
α
α
d
ddU
−=
1010
001
1
11
αα
dddU
−−
−=
00
0
12
13
23
αααααα
dddd
dddAdAIddUddUddUdU B
A −== )()()( 312213 ααα
By defining:BA
BA
BA
BA UdAItUdtUdttU )()()()( 00 −==+B
ABA UtU =)( 0
the time derivative of the rotation matrix is:
BA
BA
BAdt
BA
BA
dt
BA
BA
dt
BA UU
dtdA
dtUUdAI
dttUdttU
U Ω−=−=−−
=−+
=→→→ 00
00
0lim
)(lim
)()(lim&
BAdtdt
dtd
dtd
dtd
dtd
dtd
dtd
dtdA Ω
ωωωωωω
αα
αα
αα
=
−−
−=
−
−
−
=→→
00
0
0
0
0
limlim
12
13
23
12
13
23
00
matrix of angular velocities
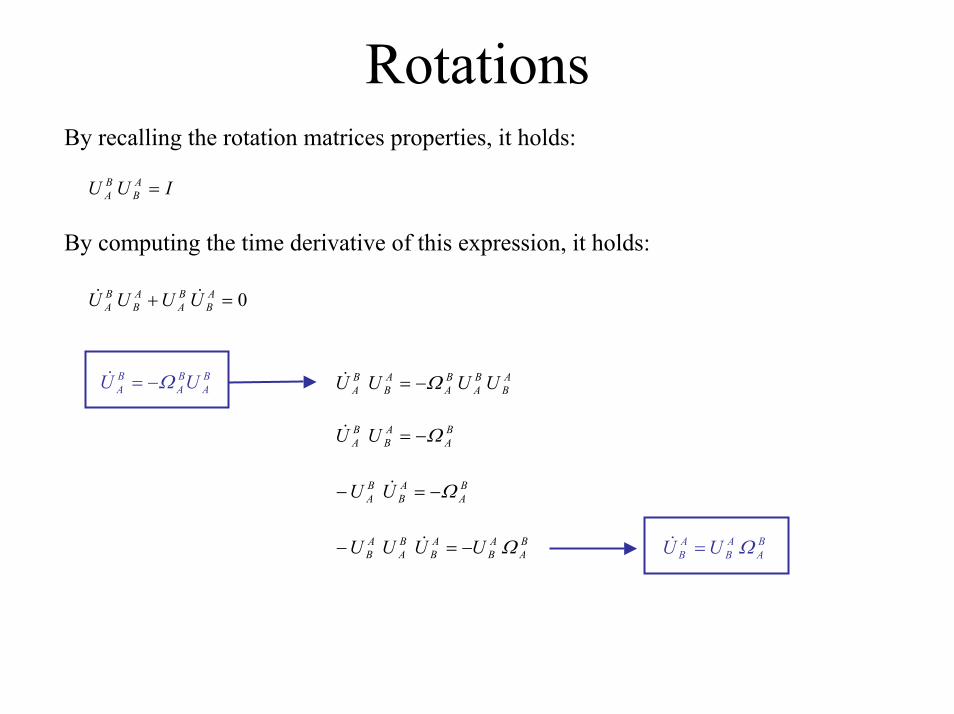
RotationsBy recalling the rotation matrices properties, it holds:
IUU AB
BA =
By computing the time derivative of this expression, it holds:
0=+ AB
BA
AB
BA UUUU &&
BA
BA
BA UU Ω−=& A
BBA
BA
AB
BA UUUU Ω−=&
BA
AB
BA UU Ω−=&
BA
AB
BA UU Ω−=− &
BA
AB
AB UU Ω=&B
AAB
AB
BA
AB UUUU Ω−=− &
Navigation equationsNavigation equations establish a link between the unknowns (namely position, velocity and attitude of the vehicle) and the observations of the accelerometers and of the gyroscopes (and in case of the GPS receivers).
Two cases:- Navigation equations in an inertial reference system
(suitable to describe space navigation, for example the orbitsof an artificial satellite)
- Navigation equations in an Earth-fixed reference system(more suitable to describe terrestrial navigation, sometimes requiring a further step towards the local-level system).
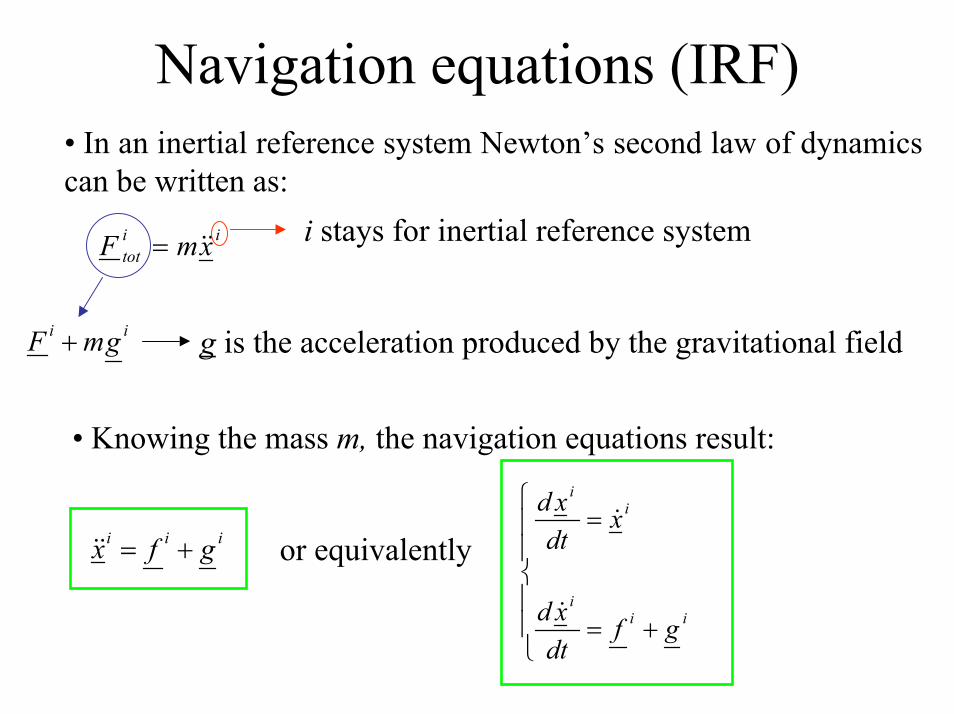
Navigation equations (IRF)• In an inertial reference system Newton’s second law of dynamics can be written as:
i stays for inertial reference systemiitot xmF &&=
ii gmF + g is the acceleration produced by the gravitational field
+=
=
iii
ii
gfdtxd
xdtxd
&
&
• Knowing the mass m, the navigation equations result:
iii gfx +=&& or equivalently
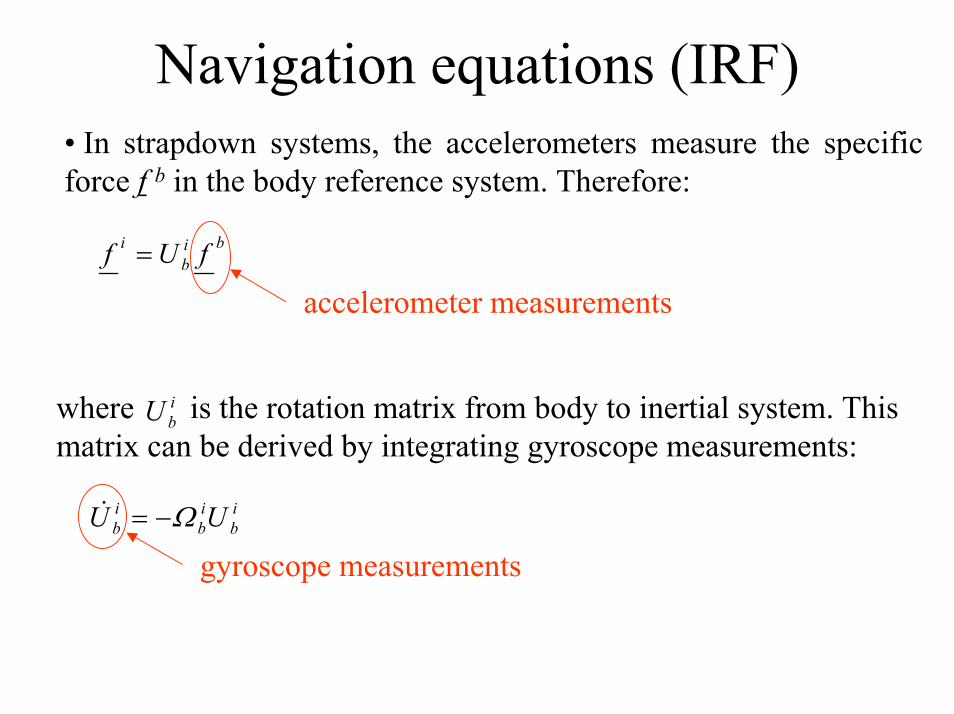
Navigation equations (IRF)• In strapdown systems, the accelerometers measure the specific force f b in the body reference system. Therefore:
bib
i fUf =
accelerometer measurements
where is the rotation matrix from body to inertial system. This matrix can be derived by integrating gyroscope measurements:
ibU
ib
ib
ib UU Ω−=&
gyroscope measurements
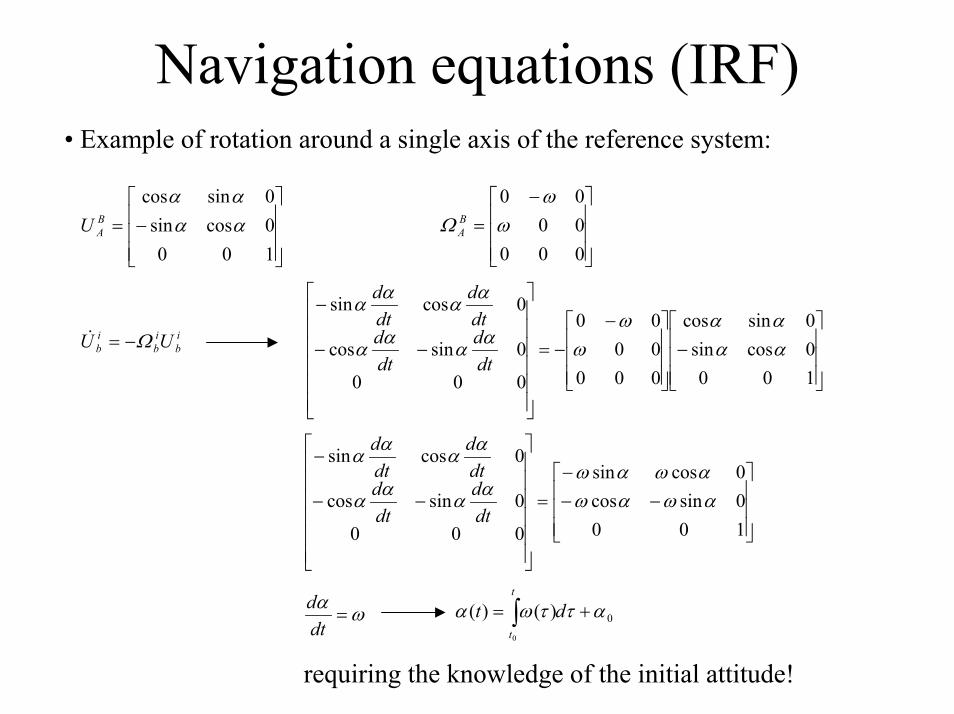
Navigation equations (IRF)• Example of rotation around a single axis of the reference system:
−=
0000000
ωω
Ω BA
−=
1000cossin0sincos
αααα
BAU
−
−−=
−−
−
1000cossin0sincos
0000000
000
0sincos
0cossin
αααα
ωω
αααα
αααα
dtd
dtd
dtd
dtd
ib
ib
ib UU Ω−=&
−−
−=
−−
−
1000sincos0cossin
000
0sincos
0cossin
αωαωαωαω
αααα
αααα
dtd
dtd
dtd
dtd
0
0
)()( αττωα += ∫ dtt
tωα
=dtd
requiring the knowledge of the initial attitude!
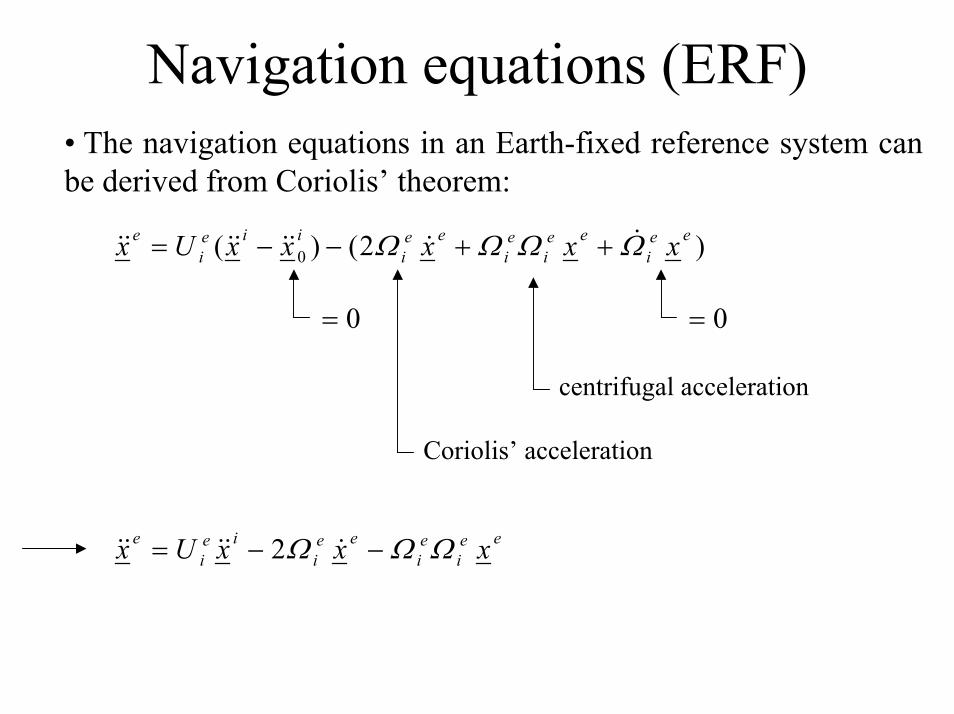
Navigation equations (ERF)• The navigation equations in an Earth-fixed reference system can be derived from Coriolis’ theorem:
)2()( 0ee
iee
iei
eei
iiei
e xxxxxUx ΩΩΩΩ &&&&&&&& ++−−=
0= 0=
centrifugal acceleration
Coriolis’ acceleration
eei
ei
eei
iei
e xxxUx ΩΩΩ −−= &&&&& 2
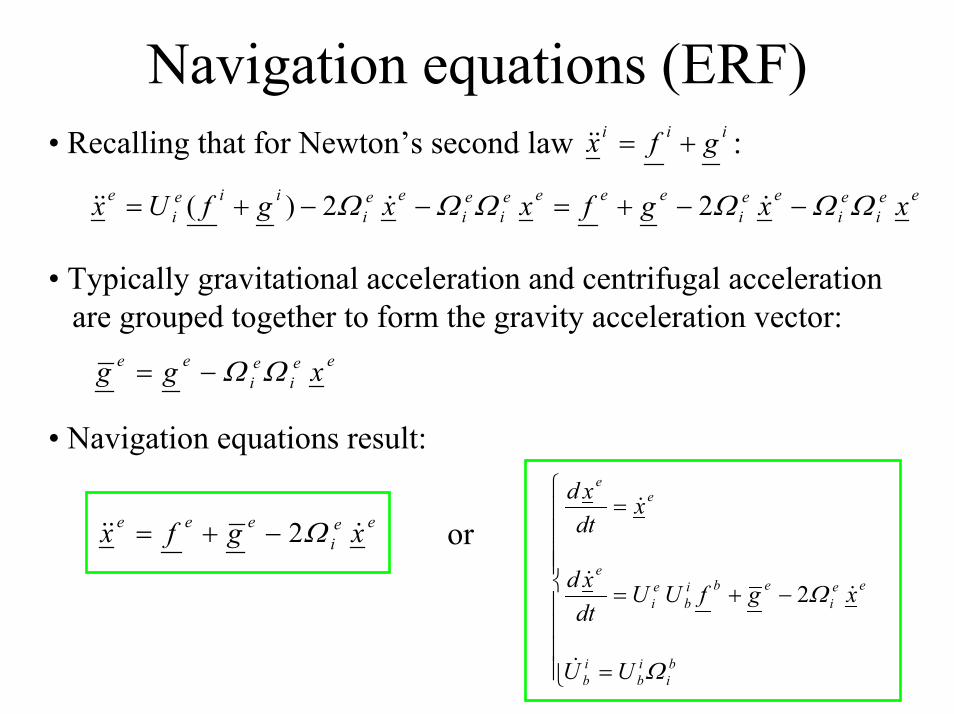
Navigation equations (ERF)• Recalling that for Newton’s second law :iii gfx +=&&
eei
ei
eei
eeeei
ei
eei
iiei
e xxgfxxgfUx ΩΩΩΩΩΩ −−+=−−+= &&&& 22)(
• Typically gravitational acceleration and centrifugal accelerationare grouped together to form the gravity acceleration vector:
eei
ei
ee xgg ΩΩ−=
eei
eee xgfx &&& Ω2−+=
=
−+=
=
bi
ib
ib
eei
ebib
ei
e
ee
UU
xgfUUdtxd
xdtxd
Ω
Ω
&
&&
&
2
• Navigation equations result:
or
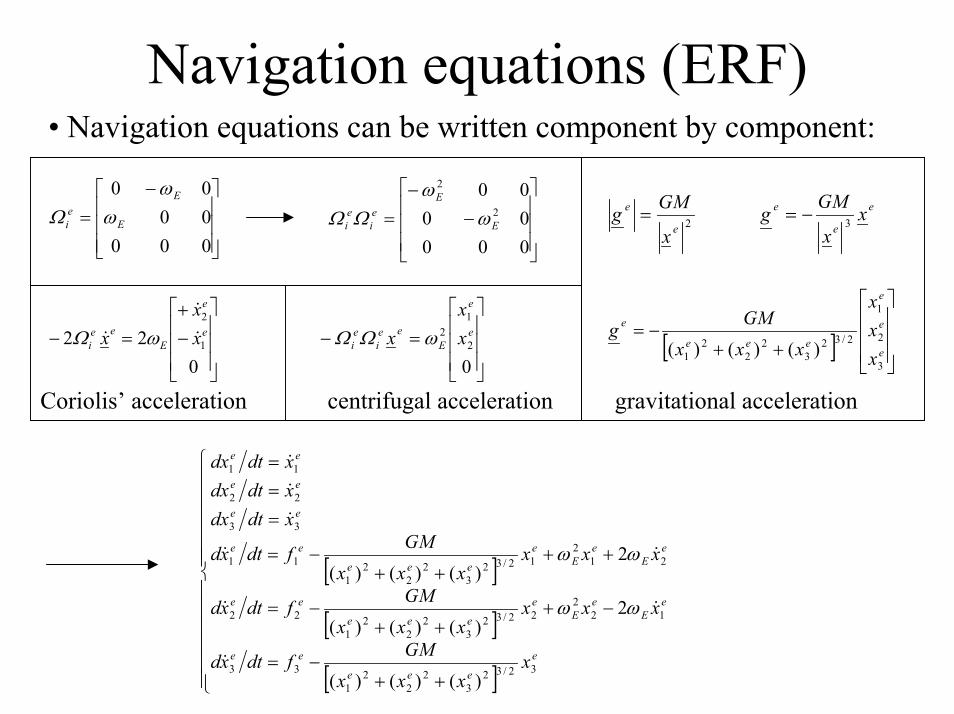
Navigation equations (ERF)• Navigation equations can be written component by component:
−=
0000000
E
Eei ω
ωΩ
−−
=0000000
2
2
E
Eei
ei ω
ωΩΩ
−+
=−0
22 1
2e
e
Eee
i xx
x &
&
& ωΩ
Coriolis’ acceleration
=−0
2
12 e
e
Eee
iei x
xx ωΩΩ
centrifugal acceleration
2e
e
x
GMg = e
e
e xx
GMg 3−=
[ ]
++−=
e
e
e
eee
e
xxx
xxxGMg
3
2
1
2/323
22
21 )()()(
gravitational acceleration
[ ]
[ ]
[ ]
++−=
−+++
−=
++++
−=
===
e
eee
ee
eE
eE
e
eee
ee
eE
eE
e
eee
ee
ee
ee
ee
xxxx
GMfdtxd
xxxxxx
GMfdtxd
xxxxxx
GMfdtxd
xdtdxxdtdxxdtdx
32/323
22
21
33
122
22/323
22
21
22
212
12/323
22
21
11
33
22
11
)()()(
2)()()(
2)()()(
&
&&
&&
&
&
&
ωω
ωω
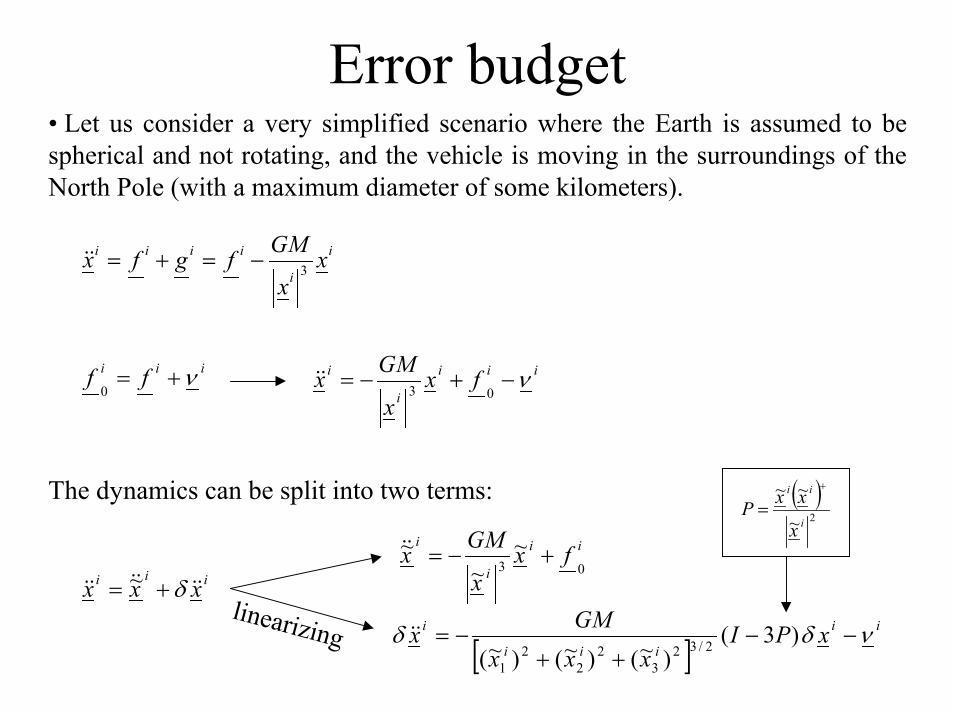
Error budget• Let us consider a very simplified scenario where the Earth is assumed to be spherical and not rotating, and the vehicle is moving in the surroundings of the North Pole (with a maximum diameter of some kilometers).
i
i
iiii xx
GMfgfx 3−=+=&&
iii
i
i fxx
GMx ν−+−=03
&&iii ff ν+=
0
ii
i
ifx
x
GMx03
~~
~ +−=&&
[ ]ii
iii
i xPIxxx
GMx νδδ −−++
−= )3()~()~()~( 2/32
32
22
1
&&
( )2~
~~i
ii
x
xxP+
=The dynamics can be split into two terms:
linearizing
iii xxx &&&&&& δ+= ~
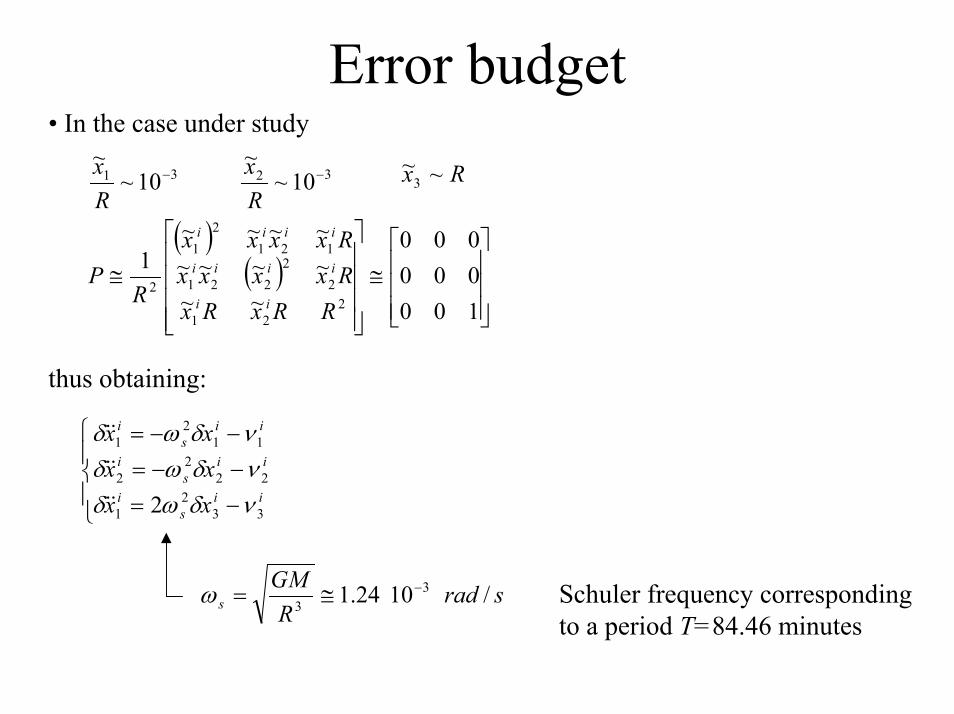
Error budget• In the case under study
31 10~~
−
Rx 32 10~
~−
Rx Rx ~~
3
( )( )
≅
≅100000000
~~~~~~~~~~
1
221
22
221
1212
1
2
RRxRxRxxxxRxxxx
RP
ii
iiii
iiii
thus obtaining:
−=−−=−−=
iis
i
iis
i
iis
i
xxxxxx
332
1
222
2
112
1
2 νδωδνδωδνδωδ
&&
&&
&&
sradR
GMs /1024.1 3
3−≅=ω Schuler frequency corresponding
to a period T=84.46 minutes
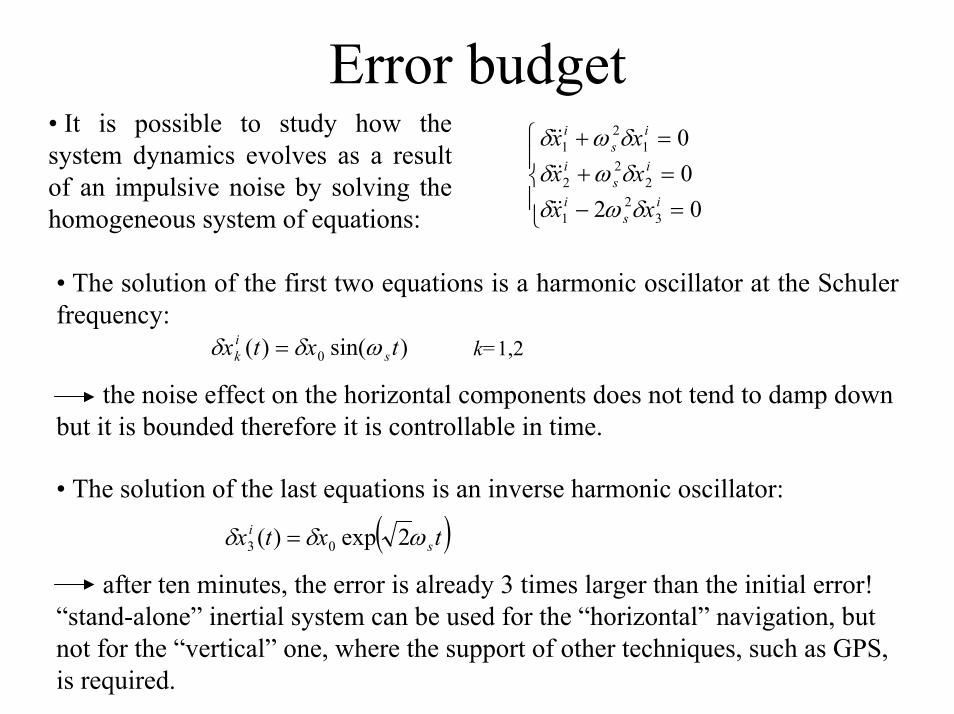
Error budget• It is possible to study how the system dynamics evolves as a result of an impulsive noise by solving the homogeneous system of equations:
=−=+=+
0200
32
1
22
2
12
1
is
i
is
i
is
i
xxxxxx
δωδδωδδωδ
&&
&&
&&
• The solution of the first two equations is a harmonic oscillator at the Schuler frequency:
)sin()( 0 txtx sik ωδδ = k=1,2
the noise effect on the horizontal components does not tend to damp down but it is bounded therefore it is controllable in time.
• The solution of the last equations is an inverse harmonic oscillator:
( )txtx si ωδδ 2exp)( 03 =
after ten minutes, the error is already 3 times larger than the initial error! “stand-alone” inertial system can be used for the “horizontal” navigation, but not for the “vertical” one, where the support of other techniques, such as GPS, is required.