Embed Size (px)
Citation preview

University of Houston
Senior Design I MECT 4275
Fall, 2016
Team Nautilus Report
Matthew ByrneDouglas SeagravesRoland RodriguezWendell Briggs

Team Nautilus Page 2 of 20
ContentsAbstract......................................................................................................................................... 3
Objective........................................................................................................................................4
Deliverables................................................................................................................................... 4
Marine Advanced Technologies Education....................................................................................4
MATE Competition History........................................................................................................5
2015 MATE Competition........................................................................................................5
2016 MATE Competition........................................................................................................6
2017 MATE Competition............................................................................................................7
Research........................................................................................................................................ 8
History of ROV........................................................................................................................... 8
Industry......................................................................................................................................9
Market Research......................................................................................................................10
Team Structure............................................................................................................................11
Mentors................................................................................................................................... 11
Materials......................................................................................................................................12
Concepts...................................................................................................................................... 14
Cost & Man hours Estimate.........................................................................................................15
Risk Matrix................................................................................................................................... 15
Project management................................................................................................................... 16
Milestones & extras.....................................................................................................................17
Appendix A – Risk Matrix.............................................................................................................18
Appendix B – Gantt Chart............................................................................................................ 19
Works Cited................................................................................................................................. 20
Figure 1 - Sample material cost...................................................................................................13Figure 2- Initial Cost Time estimate.............................................................................................15

Team Nautilus Page 3 of 20
AbstractTeam Nautilus is a highly motivated senior design team, composed of four mechanical
engineering technology students from the University of Houston. The objective for the team is
to design and build a fully functional underwater remotely operated vehicle (ROV) to compete
in the 2017 Marine Advanced Technology and Education (MATE) competition. The ROV will
have several unique features that are beyond the 2017 MATE competition requirements; the
first will be the use of two manipulating arms (one power arm and a dexterous articulating
arm). The power arm will be used to stabilize the ROV and will be operated through the use of
hydraulics. The articulating arm will have 3 degrees of freedom and be operated by
servomotors. The second unique feature is a vortex hydro cannon to clear sand and silt
disturbed by the thrusters in order to have unobstructed video feed. The third unique feature is
the ability to lift a payload of 30 pounds underwater by utilizing rotating thrusters.
Team Nautilus will utilize their engineering and design skills to make these complex
systems work as one. These tools will allow the ROV to successfully manipulate underwater
objects and complete the multiple tasks for the 2017 MATE competition. The team will use the
2016 fall semester for planning and design, then will utilize the 2017 spring semester to execute
the plan and manufacture a fully functioning ROV. Team Nautilus will team up with industry and
faculty advisors for advice, guidance, and complex problem solving. The initial ROV has an
estimated overall budget of $15,400. The team will acquire the capital needed to finance the
project by aggressive fundraising techniques and by establishing a large network of industry
professionals and mentors.
Team Nautilus Page 4 of 20
ObjectiveThe objective is to design and build a Remotely Operated Underwater Vehicle, (ROV) for
entry into the MATE 2017 Explorer class ROV competition. The ROV will be able to navigate
unassisted (driven by remote) under water and complete the various missions as prescribed in
the competition rules. The ROV will consist of a durable frame to encase all of the peripherals, a
camera to aid in navigation and identification of mission objectives, a drive thruster system to
maneuver and steady the ROV under water, a logic system to analyze and interpret sensors (as
required by MATE competition missions), a power arm to provide stability and an articulating
arm for the retrieval and manipulation of objects under water.
Deliverables Design and construct an ROV within the design constraints of the MATE competition
Operate the ROV through LabVIEW
Incorporate a fluid powered arm
Incorporate three degrees of freedom in the articulating arm/gripper
Lift a 30 pound payload under water
Increase a thruster’s baseline velocity by 5%
Build the ROV to fit in a 24” circle footprint on the largest dimension
Incorporate a camera that will rotate to see 270° around the ROV
Incorporate a self-correcting gyroscope
Incorporate a remote system to change the thruster orientation
Build and incorporate a vortex hydro cannon
Marine Advanced Technologies EducationThe Marine Advanced Technologies Education (MATE) Center is an organization and
education center that has partnered with industry and educators to advance marine
technologies and showcase career opportunities for students. This education center offers
professional development workshops for students and educators to better prepare themselves
Team Nautilus Page 5 of 20
for the workplace, as well as teach about current marine technologies in the workplace. Also
MATE prides itself with promoting and introducing students to the STEM field. The organization
was established in 1997 and has been holding an ROV competition for K12, community colleges,
and university students since 2001. The annual MATE ROV competition is internationally
recognized and teams from around the world participate.
The annual competition challenges teams to design, fabricate, and then compete in
unique, real-world scenarios. The scenario for each competition changes each year. Due to the
complexity of the tasks and the range of participants, MATE divides all ROVs into three classes:
Explorer, Ranger, and Scout. Depending on the ROV class, there are minor differences within
the competition guidelines. All teams competing must accomplish several tasks in front of a live
audience. One of the aspects that makes this competition unique is that not only are the teams
graded on preforming several underwater tasks with their robot, but also on product
presentation, technical documentation, marketing display, and a safety inspection. The teams
are graded by educators and industry professionals.
MATE Competition History2015 MATE Competition
The theme for the 2015 MATE competition was Arctic Ocean drilling and took place in
St. John’s Newfoundland and Labrador Canada. There were three different missions in which
each mission had several tasks to be completed. The teams were given 5 minutes to get the
ROV into the water and ready to start the mission. Next the teams had 15 minutes to complete
as many missions as possible. Then the teams were given 5 minutes to remove the ROV from
the water. If a team takes extra time to remove the ROV, points are deducted from the overall
score. The first mission was named Science Under the Ice. This mission consisted of deploying
the ROV through a hole in the ice to collect samples, place a sensor in a designated location,
survey an iceberg, and identify several species in the area. The second mission was dubbed
Subsea Pipeline Inspection & Repair. The first task was to find a corroded section of a pipe
during an inspection, remove the corroded section and bring it to the surface, repair the section
that was removed, and prepare a wellhead for installment of a subsea christmas tree. The final
mission was named Offshore Oilfield Production & Maintenance. To complete this mission
Team Nautilus Page 6 of 20
teams had to check the ground on an oil platform leg, find the angle the wellhead makes with
the seafloor, and measure water flow through a pipeline.
For the 2015 competition, Jesuit Robotics from Jesuit High School won the Explorer class
competition with a total of 569.83 points followed by Eastern Edge from Memorial University
with a final score of 525.50 points. The winning team’s ROV had an estimated cost of $12,800
and used three specialized frames for extreme conditions. The final cost including re-used items
was $33,921.36.
2016 MATE CompetitionThe 2016 competition was designed to simulate a trip to one of Jupiter’s moons, a coral
reef identification and study, and a rig shutdown process. As in the 2015 competition, the
teams were given 5 minutes to get the ROV into the water and ready to start the mission, 15
minutes to complete as many missions as possible, and 5 minutes to remove the ROV from the
water. If the teams take extra time to remove the ROV points are deducted from the overall
score.
This competition consisted of five missions. The first set of missions were named Outer
Space: Mission to Europa, and consisted of connecting an environmental sensor to a power
hub, measure the temperature of a vent, and take pressure readings. The second mission Inner
Space: Mission-Critical Equipment Recovery required the teams to identify specific equipment
by serial numbers, and transport the specified equipment to a recovery basket. The third
mission, Forensic Fingerprinting, required the teams to collect oil samples, return the samples
to the surface, and analyze the samples gas chromatographs. The forth mission, Deepwater
Coral Study, challenged teams to collect two coral samples, bring the samples to the surface,
and then photograph a coral colony. Rigs to Reefs was the final mission, which required teams
to plant a flag in a designated location, attach a wellhead cap to a flange, and lock down the
well head with bolts.
The 2016 MATE competition was held at the NASA Johnson Space Center in Houston,
Texas. The first place team was Memorial University of Newfoundland with a total cost of
$6,731.00 and a total of 9750 man hours on it. The second place team Jesuit High school with a
total budget of $27,416.56 and spent 3800 hours constructing it. The third place team
Team Nautilus Page 7 of 20
AMNO&CO spent $9,560.82 and a total of 4000 hours constructing it. There were 33 teams
that competed in the competition, and the average money spent on ROV construction was
$9,473.00 with an average 3100 man hours. The median amount spent was $8,348.00 and the
median hours spent was 2038 man hours. Purdue University was the team that spent the most
money in the competition at a total of $27,100.00 and 6500 hours building the ROV. Purdue
University took 13th place in the competition. At a reported $2530.00, Hong Kong Polytechnic
was the lowest spending team with a man hour investment of only 495 hours. Copia Lincoln
Community College was the lowest man hours spent on the project. It should be noted that the
lowest reported hours and money spent only accounted for changes made to an ROV from
previous years and not the total project.
2017 MATE CompetitionThe 2017 Mate mission briefing was released at the time of writing, detailing only
preliminary missions and requirements. There will again be four missions to be completed in
one demonstration run. The first mission will be called Commerce: Hyperloop Construction and
will be composed of five tasks. The first task is to insert two rebar reinforcement rods into
position in a steel baseplate. Then the ROV must install a frame onto the baseplate, remove a
pin to release the chains holding the frame, and transport and position a hose for pouring
concrete into the frame. Finally the ROV must retrieve the three positioning beacons and return
them to the surface.
The second mission will be named Entertainment: Light and Water Show Maintenance.
The first task in the mission will be to disconnect the power cable from the platform, and turn
the valve to stop the flow of water to the platform. Next the ROV will disengage the locking
mechanism at the base of the fountain, remove the old fountain, and install a new one. Last the
ROV will re-engage the locking mechanism at the base of the fountain, turn the valve to restore
the flow of water to the platform, reconnect the power cable to the platform, and return the
old fountain to the surface, side of the pool.
The third mission will be Health: Environmental Cleanup. The ROV will use a simulated
Raman laser to determine if contaminants are present in two sediment samples. It must then
collect a 100 mL sediment sample from the contaminated area and return it to the surface. The
Team Nautilus Page 8 of 20
sediments will be simulated by agar. Next, the ROV will collect two clams from the
contaminated area and return them to the surface. Lastly a cap will be placed over the
contaminated sediments.
The final mission will be Safety: Risk Mitigation. The ROV will need to locate four cargo
containers, activate each container’s Radio Frequency Identification (RFID) (This will be
simulated by shining a light into a port on the side of the container to activate the sensor), and
obtain RFID data via Bluetooth. The data will be used to determine the container’s
identification number, contents, and if the contents are high risk. (MATE will provide a
container manifest.) A buoy marker will need to be attached to the eye-bolt on the container
with high-risk cargo. The distance from the high-risk container to the other three containers
will need to be determined, as well as the direction from the high-risk container to the other
three containers. The distance and direction will be used to make a survey map of the incident
site. (MATE will provide a blank map with 0.25 meter squares.)
ResearchHistory of ROV
The history of the underwater ROV is brief due to the relatively recent conception of the
technology. The first tethered remotely operated vehicle was made by Dimitri Rebikoff in 1953.
In the early 1960’s the United States Navy saw the value of utilizing this new technology and
funded a majority of the development and testing of ROV’s with the primary purpose of
recovering and salvaging lost ordinance and wreckage. This lead to the development of Cable-
Controlled Underwater Recovery Vehicle (CURV). The next major advancements came during
the 1970-1980s when the offshore oil and gas industry starting using ROV’s. This lead to the
development of different ROVs to accomplish different tasks. Since then ROV development has
been strongly correlated with the offshore oil industry. Now ROVs are used to survey
underwater structure, environmental monitoring, and pipeline surveying to name a few.
ROV Types in order of increasing functionality:
Small electric vehicles- Primarily used for observation and inspection typically only have
a camera and go to depths of 300m

Team Nautilus Page 9 of 20
High Capacity Electric ROV- larger versions of SMV can dive to 6000m. Still only
equipped with cameras. Small electric power supplies limit the use of other peripherals
or tools.
Work Class Vehicles- Powered electrically and hydraulically so they can perform more
tasks. Typically limited payload and lift capacities. This class of ROV will have a
manipulator and a grabber
Heavy work class ROV- Most advanced version capable of working up to 3000m of water
and lift capacities of up to 11,000lbs. Most have multiple manipulators and grabbers as
well as specialized tool attachments.
Autonomous Underwater Vehicles- The next step in ROV technology. Only military
testing is known to exist in AUV’s. Hybrid AUV’s may be seen in the near future to
reduce the umbilical size from the ROV to the ROV Types in order of increasing
functionality
Industry The ROV industry is vast and has become well diversified. Most ROV’s now are built for a
specific tack or are capable of attaching and detaching several different instruments to
accomplish the current task at hand. The industry offers ROV’s for hobbyists, large industrial
applications, and underwater exploration. Industrial ROV’s are generally governed by API 17H
and ISO 13628. The two standards are nearly identical and are considered interchangeable. The
standard gives recommended practices for the development and design of ROV’s, the interfaces
on subsea production systems, as well as ROV Classifications.
Per API 17H, ROV’s are defined as “Free swimming or tethered submersible craft used to
perform tasks such as inspection, valve operations, hydraulic functions, and other general
tasks.” [1] The ROV’s are generally grouped in the following main categories:
OBSROV (observation class ROV; MCA Class I and Class II) —small vehicles fitted with
cameras/lights and may carry sensors or inspection equipment. They may also have a
basic manipulative capability. They are mainly used for inspection and monitoring.
WROV (work class ROV; IMCA Class III) —ROVs normally equipped with a five-function
grabber and a seven-function manipulators. These commonly have multiplexing controls

Team Nautilus Page 10 of 20
capability that allows additional sensors and tools to be operated without the need for a
dedicated umbilical system. WROV are split into two classes: medium WROV and large
WROV depending on their defined work scope. WROVs can carry tooling packages to
undertake specific tasks such as tie-in and connection function for flowlines, umbilicals,
rigid pipeline spools, and component replacement.
For an industry use, the company OCEANEERING is considered a world leader. OCEANEERING
designs, manufactures, and operates their fleet of ROVs and as of January 2015, OCEANEERING
was operating 336 work class ROV systems. Due to the high demand and extensive work
necessary, OCEANEERING employs over 2000 people to run their offshore ROVs.
Market ResearchThe ROV market has been set up so that it can cater to recreational and industrial
applications. One of the larger markets for the ROV is for the hobbyist. Most of these models
are used for underwater viewing and recreation. Several companies produce different sized
models from small to medium ROV’s. These ROV’s are usually under forty-five pounds and can
range from 99 dollars DIY kits to 30,000 dollar professional models. Most of these come with a
tether that connects the control module with the ROV. The control module allows steering of
the bot, and allows real time viewing of the ROV’s on board camera system. Some of the
smaller models also come with a manipulating arm. Several examples of this class of ROV are
the DTG2 Worker with a base model cost of approximately 9,500.00 dollars, the HydroView Pro
7M which retails for approximately 16,000.00 dollars, and the ROVEEE priced at 33,000.00
dollars with a five thruster set up and extended tether.
ROV’s created for the purpose of industrial application also make up a large portion of
the market. These ROV’s are usually designed for underwater pipeline survey and also special
oil rig applications. Some of these applications would be installing a manifold on an oil well,
monitoring a well head, or assisting in sealing oil wells in the Gulf of Mexico where the water
depth can reach up 9,000 feet. These machines are usually designed to accept several different
types of manipulating arms, which are attached or detached depending on the task at hand.
These arms are used to lift, screw, and rotate object into a more desirable fashion. These ROV’s

Team Nautilus Page 11 of 20
are usually operated by a small team working in remote locations. Most of these ROV’s are
large and bulky and weigh from 50 to 14,000 pounds. They are also usually very expensive with
prices ranging from 50,000 to 2,000,000+ dollars.
Team StructureThe team is structured in a way to optimize the team’s production. Matthew Byrne was
chosen to be the team lead by group decision. This decision was based on his management
experience and overall leadership qualities. Once this decision was made the team then broke
down the ROV’s components and operating systems into several major and sub-categories.
Then based on our current knowledge of ROV’s, the team grouped all the major and sub-
categories of the ROV into four master groups. These master groups were then discussed and
debated amongst the team, and finally assigned to team members. The final designation of
responsibilities is as follows: Wendell Briggs as the frame and materials lead, Roland Rodriguez
as power and articulating arm lead, Douglas Seagraves as electronics lead, and Matthew Byrne
as team lead and thruster design lead. These positions were assigned to maximize the team’s
potential and to fully utilize each team of the member’s unique set of abilities.
MentorsOne of the biggest factors for success are mentors. This was a particular aspect of the
project that the team wanted to take advantage of the most. Mentors play a key role due to
their ability to leverage their life long experience and industry expertise, offer advice for
problems encountered, and shine light on some possible future problems. The selection
process began with a team meeting. During this meeting team members voiced potential
problems with the project and possible teachers, associates, and industry professionals that
might offer help to engineering students. Once a list of names was compiled, the team then
listed their qualifications and pros and cons.
The team assigned some of the members recruiting tasks based on personal
relationships and opportunity. The first target was Professor David V. Rypien for faculty advisor
because of his motivation to teach and active outreach to students. He has also been a licensed
Team Nautilus Page 12 of 20
PE in the state of Texas since 1991. Having a licensed professional engineer to advise the group
was a major goal since the team members all aspire to obtain a PE license in the future. The
next acquisition was of Ryan Payne to fill the alumni spot. One of the major reasons for
selecting Ryan was because of his prior experience with Professor Raresh Pascali, and was also
on an infamous senior design team that built an ROV for the MATE compotation which flipped
the breakers at NASA. Ryan will be a critical tool in advising the team of potential issues when
following the MATE guidelines, and offer guidance when the team hits a wall. The next slot the
team filled was an industry advisor. Billy Snider, who works for FMC Technologies, was asked.
Billy is a University of Houston graduate and recently has been appointed to the Engineering
Alumni Association. The last position that needed to be filled was the underclassman. This was
a tough decision and the group used the assistance of a graduate student who made a few
suggestions of students. This decision is still underway but will be resolved soon.
MaterialsThe materials that will be utilized to construct the team’s ROV will have to withstand
large amounts of pressure. Another consideration is that the team wants to keep the weight of
the ROV low, so the unit can be lifted and moved by two or three people. Also the different
thruster orientations and two arms will increase the forces acting on ROV. The ROV will be in
compression from the hydrostatic pressure and will also be subjected to torques. This will cause
axial and shear stresses on the ROV, which the materials used for the frame must be able to
withstand. Some of the materials that the group are considering are polymers, metals, and
composites.
Some of the metals that are being considered are carbon steels, alloy steels and
aluminum. Carbon steels generally have a density of 7850 kg/m3, an elastic modulus from 190-
200GPa, and a Poisson’s ratio from .27-.3. Alloy steels generally have about the same density,
elastic modulus, and Poisson’s ratio, but have a greater hardness and are more brittle than
carbon steel. Alloy steels do not have as much ductility as carbon steels and is much more likely
to have critical failures. Carbon steels are more likely to corrode than some alloy steels, and
since the materials will be in contact with corrosive agents. Also machining carbon steel will be

Team Nautilus Page 13 of 20
much cheaper than machining the alloy steels. Aluminum on the other hand offers light weight
and strength.
Aluminum has a density of about 2800 kg/m3. This is much lighter than any types of
steel. The 7000 series of aluminum alloy has a modulus of elasticity of 71.7 GPa, Poisson’s rato
of .33, and with a ultimate tensile strength of 552 MPa. The 7000 series has good machinability
and for the aluminum alloys as the series goes down to 6000 and down the machinability
decreases and the modulus of elasticity deceases some as well.
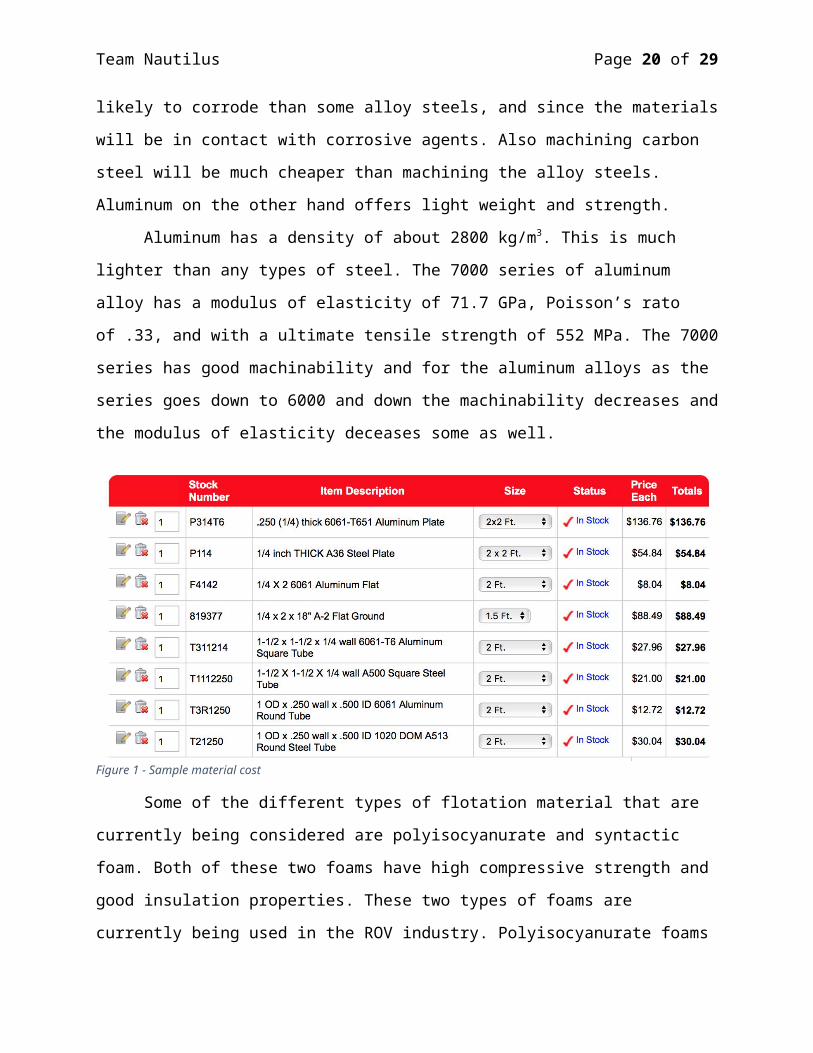
Figure 1 - Sample material cost
Some of the different types of flotation material that are currently being considered are
polyisocyanurate and syntactic foam. Both of these two foams have high compressive strength
and good insulation properties. These two types of foams are currently being used in the ROV
industry. Polyisocyanurate foams are relatively cheap and are easily formed into desirable
shapes. Syntactic foam is used mainly for deep water application, costs more, and is encased in
resin, so it is harder to manipulate into desirable shapes.
ConceptsOne of the main concepts that will be applied during the design and construction of the
ROV will be Archimedes principle, static fluid principles and the relationship between the center
of gravity and the center of buoyancy. The use of the Archimedes principle will be to determine

Team Nautilus Page 14 of 20
the buoyant force that is acting on the ROV. This force will be equal to the weight of the liquid
that is displaced by the ROV. This force will act on the ROV, so if the weight of the liquid
displaced is less than the weight of the ROV, the vehicle will sink. If it is the opposite way
around then the object will float.
Another important concept that will be taken into consideration when finding the
hydrostatic pressure acting on the vehicle will be the static fluid principle. This principal states
that the static pressure acting on and object is only dependent upon the depth of the object,
the shape of the object, the density of the fluid, and the acceleration due to gravity. Using this
principal, the team will be able to approximate the static pressure that will be applied to the
ROV as it descends into various depths. This information will be critical for selecting the
different materials that will be used to manufacture the remotely operated vehicle.
Another important aspect of the ROV that will be considered will be the location of the
center of buoyancy and the center of gravity. The stability of the vessel is directly related to the
relation of these two points. The easiest way for the vessel to be stable is to have the center of
gravity and the center of buoyancy aligned with one another. This includes considering the
distance between these two points. The distance between these two points corresponds with
the righting force that the ROV will experience when the center of gravity and center of
buoyancy become unaligned due to different forces applied to the ROV in different locations.
Examples of this could be forces due to the arm lifting an object underwater or currents in the
water pushing the ROV.
Cost & Man hours EstimateThrough the first stages of the project, an initial cost and time estimate were created.
Initially, it is estimated that the cost of the project to total $15,312.50 with a need of 2326 man
hours. The following is a breakdown:
Activity Approximate Time (hours) Approximate Cost
Team Nautilus Page 15 of 20
MATE documentation 120 $0
Frame Design 120 $0
Articulate Arm Design 160 $0
Logic System Design 160 $0
Drive Design System 240 $0
Remote Interface Design 160 $0
Waterproof Enclosure Design 160 $0
Build Frame 180 $2,200
Build Arm 200 $2,400
Build Logic System 180 $2,700
Build Drive System 240 $2,500
Build Remote Interface 150 $1,500
Assemble ROV 160 $500
Test ROV 80 $200
Register for MATE 16 $250
Contingency $3,062.50
Totals 2326 $15,312.50
Figure 2- Initial Cost Time estimate
The cost estimate is a “living document”, and will change as the semester progresses.
Risk MatrixThe first step in this process was to identify the potential problems that could hinder the
completion of the ROV. This was accomplished during a team meeting and through group
collaboration. The following list identifies the areas for concern: fundraising, materials and
product selection, lab view programming, MATE completion, system integration,
communication, system complexity, time management, sub systems, weight, registration, and
team member contribution. The next step was to go down the list and as a group rate the
probability that a problem will occur. Once this was accomplished the team went back down
the list, and designated the severity or impact the problem would have on the overall project if

Team Nautilus Page 16 of 20
it was to occur. Once this was accomplished the team made a list of solutions for the problems
and list of ideas to reduce the probability of a problem occurring. The risk matrix created is
shown in Appendix A.
One of the problems the team has identified is fundraising. Some of the ideas to
mitigate this issue would be attending the 2016 Marine Technology Society BBQ, networking,
and budget cuts. The next risk identified was the Procurement and selection of materials. Some
of the possible solutions for the problem are a group decision on dropping particular
deliverables, and design modification. Another risk that the group will encounter is
programming in LabView, which to reduce the risk of included early research and contact
mentors for advisement. Another solution considered for this issue is contacting computer
science majors within the University of Houston. Another possible risk is group communication.
Some of the things the group currently does to decrease the likely hood of this occurring is the
creation of a group text, Team email, and weekly meeting. Then other possible solutions the
group has agreed on are to involve the professor and have an intervention, voting the member
out of the group or put on probation. For this extreme action to take place there would have to
be a unanimous vote between the three members. These are just a few example of problem
analysis that have been planned for by the group. These plans ensure that if a problem is to
arise, the team is ready and has a plan of action or contingences to fall back on to reduce the
overall effect of the problem.
Project management Estimated time completions Insert Gantt chart Scope creep w/ added and extra deliverables General idea for Sunday meetings Weight constraint impact
Milestones & extrasThe team has made several decisions on meeting location and team building events to
benefit the group as a whole and encourage team bonding. The team quickly made the decision
to have a weekly meeting at the team leader’s house. This was an easy decision as he is

Team Nautilus Page 17 of 20
centrally located to all other group members. A majority of the members live close to this
location and it is easily accessed due to the freeway set up in Houston. These meetings have
created unity amongst the team and helps to keep group members on task. A major
accomplishment for the team was finding Ryan Payne as a mentor early on in the project. The
team was able to interview Ryan before the CTR was approved. The team again utilized car-
pooling to maximize group bonding, reduce overall gas consumption, and minimize the overall
environmental footprint of the group.
Teambuilding is viewed by the group as an essential requirement necessary for cohesion
and ultimate success. Teambuilding events are seen as an investment into the group. This time
could otherwise be used to design, analyze or contribute to the project, however, the team
agreed that a strong bond can prevent future frustrations which could lead to greater
inefficiencies. Two teambuilding events that have been set up to go camping event and have a
family BBQ. The team feels that it is important to build moral, and also bring the groups family
members together to strengthen the team.

Team Nautilus Page 18 of 20
Appendix A – Risk Matrix
Risk Matrix created 10/2/16

Team Nautilus Page 19 of 20
Appendix B – Gantt Chart
Team Nautilus Page 20 of 20
Works Cited[1]
American Peteroleum Institute, "Remotely Operated Tools and Interfaces on Subsea Production Systems 17H," API Publishing Institute, Washington, DC, 2014.
[2]
MATE Center, "MATE - Marine Advanced Technology Education :: ROV Competition Home," 29 August 2016. [Online]. Available: http://www.marinetech.org/files/marine/files/ROV%20Competition/2017%20competition/Missions/2017%20Competition_Product_Demo_Spec%20briefing_FINAL.pdf. [Accessed 6 September 2016].
[3]
Oceaneering International Inc., "ROV Services," OCEANEERING, 2016. [Online]. Available: http://www.oceaneering.com/rovs/. [Accessed 8 October 2016].