Embed Size (px)
Citation preview


About Rorobot
About Rorobot
1
Rorobot specializes in the design, development, production and sales of the
flexible hand at the end of the robot arm. The product technology is applied to
industrial automation, logistics, food, medical, automobile, clothing, textile, 3C
electronics, toys, education and many other industries.
At present, the main products are finger module, gripper suit, beak suit, control
unit and so on. Among them, gripper suit is a universal flexible gripper which
really simulates the strength and touch of the human finger, while beak is the
think-tank for solving jewellery and micro irregular objects.
Choosing “Rorobot" is to give your robot a gentle hand. We look forward to
your inquiry and wish to cooperate sincerely with you.

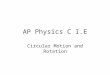
Assembling View
Robot
Connector Part
Quick Changer
Connector Part
Quick Changer
Gripper Suit GS-3C5V5-08-S01-01
Robot Flange
Slide Mounting Platte
Finger Module
Spring Rod
Assembling View
2

[ FM ]
Finger Module
1.1
[ F ]
Roro Finger
1.2
[ BS ]
Beak Suit
2.0
[ B ]
Beak
2.1
[ SMP ]
Slide Mounting Platte
3.1
[ P ]
Profile
3.5
[ RF ]
Robot Flange
3.2
[ QC ]
Quick Changer
3.7
[ CP ]
Connector Part
3.6
[ SR ]
Spring Rod
3.3
[ RR ]
Rigid Rod
3.4
[ GS ]
Gripper Suit
1.0
General Index
[ ACU ]
Active Control Unit
4.2
[ PCU ]
Passive Control Unit
4.1
General Index
3

Encoding Method
Encoding Method
4
GS - 2 B5V5 - 04 - R01 - 01
① Category Name
② Module Number
③ Finger Module
④ Slide Mounting Platte
⑤ Connector Rod
Gripper Suit
⑥ Robot Flange
① Category Name [GS] Gripper Suit
② Module Number[Example] 2:Module Number is 2
Optional 2/3/4…
③ Finger Module
[Example] B5V5:FM-B5V5 Finger Module Series-V5
Finger Module Series-V4 Refer to 1.1.1
Finger Module Series-V5 Refer to 1.1.2
④ Slide Mounting Platte[Example] 04:SMP-04
Refer to 3.1
⑤ Connector Rod
[Example] R01:RR-01 Rigid Rod
[Example] S01:SR-01 Spring Rod
Refer to 3.3, 3.4
⑥ Robot Flange[Example] 01:RF-01
Refer to 3.2

Encoding Method
FM - A6 V4
① Category Name
② Finger Model
③ Finger Series
Finger Module
BS - 2B - S01 - 01
① Category Name
② Beak Model③ Connector Rod
Roro Beak Suit
Encoding Method
5
④ Robot Flange
① Category Name [FM] Finger Module
② Finger Model
[Example] A6:Finger-A6 Series-A Knobs-6
This version includes 21 finger models.
Refer to 1.2
③ Finger SeriesV4:Series-V4 Air Input - Underside
V5:Series-V5 Air Input - Backside
① Category Name [BS] Beak Suit
② Beak Model[Example] 2B:Beak-2B Pieces-2
Optional Pieces-2/3/4... Refer to 2.1
③ Connector Rod[Example] S01:SR-01 Spring Rod
Refer to 3.3
④ Robot Flange[Example] 01:RF-01
Refer to 3.2

1
[ FM ]
Finger Module
1.1
[ F ]
Finger
1.2
[ GS ]
Gripper Suit
1.0
6

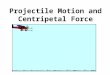
Combination Mode
Combination Mode
4 Fingers Centripetal Combination
Parallel Combination
2 Fingers Centripetal Combination
5 Fingers Centripetal Combination
Other Combinations
3 Fingers Centripetal Combination
7

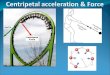
Robot Flange Rigid Rod Slide Mounting Platte Finger Module
RF-02 RR-02 SMP-04 2 x FM-B5V5
GS-2B5V5-04-R02-02 2 Fingers Gripper Suit
1.0 Gripper Suit
1.0 Gripper Suit
Component Module
Robot Flange
RF-02
Slide Mounting Platte
SMP-04
Finger Module
FM-B5V5
Rigid Rod
RR-02
2 Fingers gripper suit, the most basic combination, has strong versatility and
adaptability. It is suitable for gripping soft, light objects and strip objects.
8

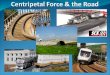
Normal StateNegative Pressure State Positive Pressure State Fingertip Stroke
Series - GS-2B[X]V5-04-R02-02 Parameter
1.0 Gripper Suit
1.0 Gripper Suit
Series - GS-2B[X]V5-04-R02-02 Performance
9
Maximum Load Working Frequency Precision Range
250 g 150 times/min 0.5 mm
Gmin [mm] Gmax [mm]
GS-2B3V5-04-R02-02 10 - 35*(85**) 31 40 1 73*(123**) 38 216*(224**)
GS-2B4V5-04-R02-02 10 - 35*(85**) 41.5 40 1 85*(135**) 50 221*(229**)
GS-2B5V5-04-R02-02 10 - 35*(85**) 52 40 1 115*(165**) 80 226*(234**)
GS-2B6V5-04-R02-02 10 - 35*(85**) 62.5 40 1 115*(165**) 75 231*(239**)
GS-2B7V5-04-R02-02 10 - 35*(85**) 73 40 1 145*(195**) 105 236*(244**)
GS-2B8V5-04-R02-02 10 - 35*(85**) 83.5 40 1 155*(205**) 115 241*(249**)
Height
X1 [mm]
*:SMP-04 Slide Mounting Platte(short type)
**:SMP-11 Slide Mounting Platte(long type)
Self Weight
[g]
Parameter
Gripper Suit
Static Fingertip Distance
D [mm]
Dynamic Fingertip Distance G Fingertip Stroke
HR [mm]
Finger Length
Lf [mm]

Robot Flange
RF-01
Slide Mounting Platte
SMP-08
Finger Module
FM-C4V5
Spring Rod
SR-01
3 Fingers gripper suit has strong adaptability and relatively high speed. It is
especially suitable for round objects to be surrounded and crawled, and can also be
used for external bracing.
10
GS-3C4V5-08-S01-01 3 Fingers Gripper Suit
1.0 Gripper Suit
1.0 Gripper Suit
Component Module
Robot Flange Spring Rod Slide Mounting Platte Finger Module
RF-01 SR-01 SMP-08 3 x FM-C4V5

11
Normal StateNegative Pressure State Positive Pressure State Fingertip Stroke
Series - GS-3C[X]V5-08-S01-01 Parameter
1.0 Gripper Suit
1.0 Gripper Suit
Series - GS-2B[X]V5-04-R02-02 Performance
Maximum Load Working Frequency Precision Range
120 g 200 times/min 0.5 mm
Gmin [mm] Gmax [mm]
GS-3C3V5-08-S01-01 20 - 80* (150**) 21 32 5 100* (170**) 22 225*(257**)
GS-3C4V5-08-S01-01 20 - 80* (150**) 28 32 5 116* (186**) 36 232.5*(264.5**)
GS-3C5V5-08-S01-01 20 - 80* (150**) 35 32 5 120* (190**) 41 240*(272**)
GS-3C6V5-08-S01-01 20 - 80* (150**) 42 32 5 135* (205**) 54 247.5*(279.5**)
GS-3C7V5-08-S01-01 20 - 80* (150**) 49 32 5 150* (220**) 67 255*(287**)
GS-3C8V5-08-S01-01 20 - 80* (150**) 56 32 5 160* (230**) 76 262.5*(294.5**)
*:SMP-08 Slide Mounting Platte(short type)
**:SMP-05 Slide Mounting Platte(long type)
Self Weight
[g]
Parameter
Gripper Suit
Static Fingertip Distance
D [mm]
Dynamic Fingertip Distance G Fingertip Stroke
HR [mm]
Finger Length
Lf [mm]
Height
X1 [mm]

Robot Flange
RF-01
Slide Mounting Platte
SMP-09
Finger Module
FM-B5V5
Spring Rod
SR-01
4 Fingers gripper suit has high adaptability and speed, and is especially suitable
for gripping square objects.
12
GS-4B5V5-09-S01-01 4 Fingers Gripper Suit
1.0 Gripper Suit
1.0 Gripper Suit
Component Module
Robot Flange Spring Rod Slide Mounting Platte Finger Module
RF-01 SR-01 SMP-09 4 x FM-B5V5

13
Normal StateNegative Pressure State Positive Pressure State Fingertip Stroke
Series - GS-4B[X]V5-09-S01-01 Parameter
1.0 Gripper Suit
1.0 Gripper Suit
Series - GS-4B[X]V5-09-S01-01 Performance
Maximum Load Working Frequency Precision Range
500 g 100 times/min 0.5 mm
Gmin [mm] Gmax [mm]
GS-4B3V5-09-S01-01 27 - 100* (190**) 31 40 5 138* (228**) 38 355*(410**)
GS-4B4V5-09-S01-01 27 - 100* (190**) 41.5 40 5 150* (240**) 50 365*(420**)
GS-4B5V5-09-S01-01 27 - 100* (190**) 52 40 5 180* (270**) 80 375*(430**)
GS-4B6V5-09-S01-01 27 - 100* (190**) 62.5 40 5 190* (280**) 80 385*(440**)
GS-4B7V5-09-S01-01 27 - 100* (190**) 73 40 5 210* (300**) 105 395*(450**)
GS-4B8V5-09-S01-01 27 - 100* (190**) 83.5 40 5 220* (310**) 115 405*(460**)
*:SMP-09 Slide Mounting Platte(short type)
**:SMP-06 Slide Mounting Platte(long type)
Self Weight
[g]
Finger Length
Lf [mm]
Height
X1 [mm]
Parameter
Gripper Suit
Static Fingertip Distance
D [mm]
Dynamic Fingertip Distance G Fingertip Stroke
HR [mm]

Robot Flange
RF-02
Slide Mounting Platte
SMP-10
Finger Module
FM-A5V4
Rigid Rod
RR-02
5 Fingers gripper suit has relatively high load capacity, especially for heavy
objects.
14
GS-5A5V4-10-R02-02 5 Fingers Gripper Suit
1.0 Gripper Suit
1.0 Gripper Suit
Component Module
Robot Flange Rigid Rod Slide Mounting Platte Finger Module
RF-02 RR-02 SMP-10 5 x FM-A5V4

15
Normal StateNegative Pressure State Positive Pressure State Fingertip Stroke
Series - GS-5A[X]V4-10-R02-02 Parameter
1.0 Gripper Suit
1.0 Gripper Suit
Series - GS-5A[X]V4-10-R02-02 Performance
Gmin [mm] Gmax [mm]
GS-5A3V4-10-R02-02 32 - 110* (220**) 41 36 5 150* (260**) 30 655*(739**)
GS-5A4V4-10-R02-02 32 - 110* (220**) 55 36 5 170* (280**) 55 685*(823**)
GS-5A5V4-10-R02-02 32 - 110* (220**) 69 36 5 200* (310**) 80 715*(907**)
GS-5A6V4-10-R02-02 32 - 110* (220**) 83 36 5 230* (340**) 115 745*(991**)
GS-5A7V4-10-R02-02 32 - 110* (220**) 97 36 5 250* (360**) 135 775*(1075**)
GS-5A8V4-10-R02-02 32 - 110* (220**) 111 36 5 280* (390**) 165 805*(1159**)
GS-5A9V4-10-R02-02 32 - 110* (220**) 125 36 5 300* (410**) 180 835*(1243**)
GS-5A10V4-10-R02-02 32 - 110* (220**) 139 36 5 330* (440**) 215 865*(1327**)
*:SMP-10 Slide Mounting Platte(short type)
**:SMP-07 Slide Mounting Platte(long type)
Self Weight
[g]
Finger Length
Lf [mm]
Height
X1 [mm]
Parameter
Gripper Suit
Static Fingertip Distance
D [mm]
Dynamic Fingertip Distance G Fingertip Stroke
HR [mm]
Maximum Load Working Frequency Precision Range
1000 g 80 times/min 0.5 mm

1.0 Gripper Suit
1.0 Gripper Suit
Parallel Combination
The spliced finger module is very expansibility. The number of fingers can be
increased and reduced according to the needs. The design is compact and compact.
The weight is light. The load is high. The slot is installed. The angle of fingers can
be adjusted freely, especially for the gripping of strip, rod and bar.
16

Other Combinations
The design of block type makes rorobot finger module can be stitching and
extending seamlessly, with the sliding mounting plate and standard profile. Rorobot
gripper suit has high expansibility and adaptability, without additional customization.
The user can build a variety of combination methods freely according to the actual
needs, greatly shorten the design cycle and save the development cost.
17
1.0 Gripper Suit
1.0 Gripper Suit

1.1 Finger Module
1.1 Finger Module
1.1.1 Series - FM-V4
18
Finger series Model No. Height H [mm] Fingertip Stroke HR [mm] Finger Length Lf [mm] Length L [mm] Width W [mm] Load Range [g] Self Weight [g]
FM-A3V4 51 30 41 78 31 200 - 500 70
FM-A4V4 51 55 55 92 31 200 - 500 75
FM-A5V4 51 80 69 106 31 200 - 500 80
FM-A6V4 51 115 83 120 31 200 - 500 85
FM-A7V4 51 135 97 134 31 200 - 500 90
FM-A8V4 51 165 111 148 31 200 - 500 95
FM-A9V4 51 180 125 162 31 200 - 500 100
FM-A10V4 51 215 139 176 31 200 - 500 1050 0
FM-B3V4 45 38 31 61 25 150 - 300 42
FM-B4V4 45 50 42 71 25 150 - 300 43.5
FM-B5V4 45 80 52 82 25 150 - 300 45
FM-B6V4 45 75 63 92 25 150 - 300 46.5
FM-B7V4 45 105 73 103 25 150 - 300 48
FM-B8V4 45 115 84 113 25 150 - 300 49.5
FM-B9V4 45 128 94 124 25 150 - 300 510 0
FM-C3V4 37 22 21 50 18 0 - 100 19.2
FM-C4V4 37 36 28 57 18 0 - 100 20
FM-C5V4 37 41 35 64 18 0 - 100 20.8
FM-C6V4 37 54 42 71 18 0 - 100 21.6
FM-C7V4 37 67 49 78 18 0 - 100 22.4
FM-C8V4 37 76 56 85 18 0 - 100 23.2
Series-C
Series-A
Series-B

1.1.2 Series - FM-V5
1.1 Finger Module
1.1 Finger Module
19
Finger series Model No. Height H [mm] Fingertip Stroke HR [mm] Finger Length Lf [mm] Length L [mm] Width W [mm] Load Range [g] Self Weight [g]
FM-A3V5 36 30 41 88 31 200 - 500 52
FM-A4V5 36 55 55 102 31 200 - 500 57
FM-A5V5 36 80 69 116 31 200 - 500 62
FM-A6V5 36 115 83 130 31 200 - 500 67
FM-A7V5 36 135 97 144 31 200 - 500 72
FM-A8V5 36 165 111 158 31 200 - 500 77
FM-A9V5 36 180 125 172 31 200 - 500 82
FM-A10V5 36 215 139 186 31 200 - 500 87
FM-B3V5 29 38 31 71 25 150 - 300 28
FM-B4V5 29 50 42 82 25 150 - 300 29.5
FM-B5V5 29 80 52 92 25 150 - 300 31
FM-B6V5 29 75 63 103 25 150 - 300 32.5
FM-B7V5 29 105 73 113 25 150 - 300 34
FM-B8V5 29 115 84 124 25 150 - 300 35.5
FM-B9V5 29 128 94 134 25 150 - 300 37
FM-C3V5 22 22 21 53 18 0 - 100 13.7
FM-C4V5 22 36 28 60 18 0 - 100 14.5
FM-C5V5 22 41 35 67 18 0 - 100 15.3
FM-C6V5 22 54 42 74 18 0 - 100 16.1
FM-C7V5 22 67 49 81 18 0 - 100 16.9
FM-C8V5 22 76 56 88 18 0 - 100 17.7
Series-C
Series-A
Series-B

1.2 Roro Finger
1.2 Roro Finger
Size Parameter
20
Positive Pressure Hmin Negative Pressure Hmax
A3 28 10 20 41 69 24 200 - 500 30
A4 28 25 30 55 83 24 200 - 500 35
A5 28 35 45 69 97 24 200 - 500 40
A6 28 55 60 83 111 24 200 - 500 45
A7 28 65 70 97 125 24 200 - 500 50
A8 28 80 85 111 139 24 200 - 500 55
A9 28 85 95 125 153 24 200 - 500 60
A10 28 105 110 139 167 24 200 - 500 65
B3 21 19 19 31 52 18 150 - 300 14
B4 21 25 25 42 62 18 150 - 300 15.5
B5 21 40 40 52 73 18 150 - 300 17
B6 21 35 40 63 83 18 150 - 300 18.5
B7 21 50 55 73 94 18 150 - 300 20
B8 21 55 60 84 104 18 150 - 300 21.5
B9 21 60 68 94 115 18 150 - 300 23
C3 14 12 10 21 34 12 0 - 100 3.7
C4 14 18 18 28 41 12 0 - 100 4.5
C5 14 21 20 35 48 12 0 - 100 5.3
C6 14 26 26 42 55 12 0 - 100 6.1
C7 14 32 35 49 62 12 0 - 100 6.9
C8 14 36 36 56 69 12 0 - 100 7.7
Model No.Height
H [mm]
Series-B
Series-C
Series
Series-A
Load Range
[g]
Width
W [mm]
Length
L [mm]
Lf
[mm]
Fingertip Stroke HR [mm] Self Weight
[g]

1.2 Roro Finger
1.2 Roro Finger
Model comparison
Series - A
21
Series - B
Series - C

2
[ B ]
Beak
2.1
[ BS ]
Beak Suit
2.0
22

2.0 Roro Beak Suit
2.0 Roro Beak Suit
BS-2B-S01-01 2 pieces Beak Suit
Component Module
23
Robot Flange
RF-01
Roro Beak
B-2B
Spring Rod
SR-01
Robot Flange Spring Rod Roro Beak
RF-01 SR-01 B-2B

2.0 Roro Beak Suit
2.0 Roro Beak Suit
2.0.1 BS-2B-S01-01 Roro Beak Suit with pneumatic nipple spring rod and Flange
2.0.2 BS-2B-p Roro Beak Suit Pneumatic Pen
Roro Beak Suit with cushioning function can be directly installed at the end of the robot arm.
24

2 pieces Roro Beak
Gripping Range : 1-5mm, Application : fibrous, striped small objects
3 pieces Roro Beak
Gripping Range : 7-12mm, Application : gripping small rings by external bracing
4 pieces Roro Beak
Gripping Range : 1-5mm, Application : spherical, irregular small objects, the best universality
2.1 Roro Beak
2.1 Roro Beak
2.1.1 Roro Beak B-2B
2.1.2 Roro Beak B-3B
2.1.3 Roro Beak B-4B
25
Maximum Load Maximum Working Frequency Precision Range
5 g 200 times/min 0.1 mm

3[ SMP ]
Slide Mounting Platte
3.1
[ P ]
Profile
3.5[ RF ]
Robot Flange
3.2
[ QC ]
Quick Changer
3.7
[ CP ]
Connector Part
3.6[ SR ]
Spring Rod
3.3
[ RR ]
Rigid Rod
3.4
26

3.1 Slide Mounting Platte
3.1 Slide Mounting Platte
SMP-01 / SMP-02 / SMP-03
SMP-04
SMP-08 SMP-09 SMP-10
SMP-05 SMP-06 SMP-07
27
Model No. Slot-Length A [mm] Slot-Spacing B [mm] Length L [mm] Width W [mm] Thickness [mm]
SMP-01 50 10 65 20 6
SMP-02 75 10 90 20 6
SMP-03 100 10 115 20 6
Model No. Slot-Length A [mm] Slot-Spacing B [mm] Length L [mm] Thickness [mm]
SMP-04 20 10 62 8
SMP-05 50 10 148 10
SMP-06 67 10 190 10
SMP-007 78 10 220 10
SMP-08 (short type) 15 10 78 10
SMP-09 (short type) 22 10 100 10
SMP-10 (short type) 23 10 110 10

3.2 Robot Flange
3.2 Robot Flange
3.2.1 Robot Flange RF-01
3.2.2 Robot Flange RF-02
28

3.3 Spring Rod
3.3 Spring Rod 3.4 Rigid Rod
3.4 Rigid Rod
SR-01
29
Model No. Length L [mm] Diameter D [mm]
RR-01 35 10
RR-02 55 10
RR-03 75 10
RR-04 95 10
RR-05 115 10

3.5 Profile
3.5 Profile
30
Model No. Length L [mm] Width W [mm] Height H [mm]
P-001 100 20 20
P-002 150 20 20
P-003 200 20 20
P-004 300 20 20

Cross fixed arch support for aluminum profile
Connecting parts of section and rod
3.6 Connector Part
3.6.1 Connector Part CP-01
3.6.2 Connector Part CP-04
3.6 Connector Part
31

3.7 Quick Changer
Loading Range:0-5 kg
Quick Changer QC-02F
3.7 Quick Changer
Quick Changer QC-02M
32

4
[ ACU ]
Active Control Unit
4.2
[ PCU ]
Passive Control Unit
4.1
33

Roro Gripping system consists of roro gripper, roro control unit, compressed air source,
industrial robot and its control system.
Roro control unit, as the standard driving control unit of rorobot gripper suit, is controlled by
the standard I/O signal port, the high and low level signal port or the remote control, and can
work with the industrial robot or PLC in a simple and efficient cooperative work. The parameter
adjustment panel is visual and intuitive. Knob adjustment is simple and convenient. No additional
software is needed to complete the opening and closing force of the gripper and the adjustment
of the opening and closing speed. The built-in sensor can feed back the gesture of the gripper in
real time, realize closed-loop control, speed up the work rhythm and improve the work efficiency.
The remote controller of control unit can remotely control the opening and closing of the gripper,
making the debugging convenient and efficient, thus greatly saving the on-the-spot downtime
and debugging time.
4.0 Control Unit
Roro Gripping system
4.0 Control Unit
34

4.1 PCU / Passive Control Unit
Work and Installation Parameter
4.0 Control Unit
4.0 Control Unit
PCU passive control unit is driven by compressed air. It is designed for the working
situation of compressed air source. With industrial manipulator, it is reliable, durable, long
service life, fast working speed, all metal shell, high protection grade, and can adapt to bad
working environment.
35
Name Parameter
Fuselage Shell Cast aluminum
Working Voltage AC 220V 50Hz
Working Pressure 0.3~0.8MPa dry clean air
Output Pressure -70~120KPa
Output pressure
overload protection120Kpa
Controlling I/O switch / 12~24VDC level signal / remote controller
I/O Switch
24V Level signal (3.3, 5, 12V optional)
Cooling Mode Natural Cooling
Occasions Avoid a large amount of dust, oil, and corrosive gases
Net Weight [kg] 5.8
Size [mm] 330*230*120
Protection Grade IP53
Feedback Signal

4.2 ACU / Active Control Unit
Work and Installation Parameter
4.0 Control Unit
4.0 Control Unit
ACU active control unit has a built-in drive and battery. Under the condition of full power,
active control unit can drive the rorobot gripper suit for 3.5 hours without power supply and gas
source. It is designed for the non gas source work site. It can be used for the worksite of the AGV
mobile robot workstation or rorobot gripper suit. It is light, portable and easy to operate. That is,
reducing the tedious pipeline on the commissioning site and shortening the commissioning time.
36
Name Parameter
Fuselage Shell ABS Waterproof Plastic
Working Voltage AC 220V 50Hz
DC 12.6V
DC 48V (optional)
Output Pressure -70~120KPa
Output pressure
overload protection120Kpa
Controlling I/O switch / 12~24VDC level signal / remote controller
I/O Switch
12V Level signal (3.3, 5, 24V optional)
Cooling Mode Natural Cooling
Occasions Avoid a large amount of dust, oil, and corrosive gases
Net Weight [kg] 3.9
Size [mm] 330*230*110
Protection Grade IP53
Charging Voltage
Feedback Signal