Embed Size (px)
Citation preview

— A B B M E A SU R EM ENT & A N A LY TI C S | TECH N I C A L DE SCR I P TI O N
ControlMaster CM30, CM50 and CMF310Universal process controllers
pH dosing in effluent discharge(deadtime compensation) control
Measurement made easy
—Introduction
From growing vegetables to treating water, the pH level of a substance plays an important role in everyday life.
pH refers to the balance of the hydrogen and hydroxide ions in a solution. More hydrogen ions than hydroxide ions results in an acidic solution and more hydroxide ions than hydrogen ions results in an alkaline solution. A pH-neutral solution results if the number of hydrogen and hydroxide ions are equal.
This document focuses on using ABB’s ControlMaster universal process controllers in a pH dosing of effluent water application. It explains why this process must be controlled and details how to configure the controller.
—Water
River/stream water normally has a pH value of between 6 and 8 and is affected by a number of factors:
• bedrock and soil composition• the amount of localized plant growth and
organic material within the water body• contamination by chemicals or other effluent• acid rain and other pollutants from industry
Normal precipitation is slightly more acidic with a pH value of between 5 and 6 but this is not normally enough to drastically change the pH of a moving river or large static body of water like a reservoir or lake.
The pH level of water is critical as large changes in either direction on the pH scale can have a drastic effect on the indigenous aquatic animal population within the water body. Movement away from normal ‘harmless’ pH levels first affects the animals’ fertility. Larger changes lead to the death of the adult animals that in turn results in the eventual extinction of all aquatic life within the water body.
—ControlMaster CM30, CM50 and CMF310

2 CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
—Industry
Water is used in almost every process, from day-to-day activities to heavy industrial processes. Most domestic and sewage waste water is returned to the local water treatment works where it is cleaned and processed before being sent back into the water supply. However, some large plants and heavy processes require far more water than is reasonably possible to supply through mains water supply routes. In these cases, the plant is normally situated in close proximity to a large body of water such as a river to ensure that a large supply of fresh water is readily available. Examples of plants purposely built in such locations include power plants and paper mills. The water is normally used as a natural coolant for a heat generating process and then itself cooled before being returned to the water supply from which it came. This means that the water supply is constantly replenished, and so the level of that water supply remains relatively constant.
However, the nature of these processes, while not directly adding anything to the water, does mean that some contamination of the water is inevitable.
To ensure that the water is not harmful and that the plant operators are responsible for its quality, there is legislation in place that dictates the following:
• how much water can be taken per day• how much water can be returned per day• the pH level of the water that is returned• the quality of the water that is returned
This means that not only must plant operators monitor and record the flow of the water (and pay any fines imposed for discharge over the preset limits), they must also ensure that the water discharged is of the same quality and pH as the water taken. To ensure that the pH is at the correct level, chemicals must be added to the water before it is discharged in a process known as ‘dosing’.
—Deadtime compensation
The chemicals that are added to the water differ depending on the pH level of the water after the process. If the pH level is too acidic, a substance with alkaline properties must be added; if the water is too alkaline, a substance with acidic properties must be added before the water is discharged into the supply body.
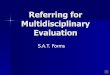
A process controller is used to ensure that the correct amounts of each chemical are added in order to reach the correct pH level before discharge – this process is called dosing. However, when a chemical is introduced into a process, the reaction is not always instantaneous, particularly when chemicals are introduced into a process flow. This means that in applications where a chemical reaction is likely to take place, there may be a delay between the time the chemical is added to the process and the time that the associated change in the process variable is seen. This delay is referred to as ‘deadtime’.
OP
PVDeadtime (L)
Figure 1 Deadtime
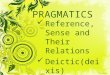
When there are long deadtimes in a process, the control performance obtained with PID alone is very limited. The classic solution for such deadtime processes is to use a model known as a ‘Smith Predictor’ – a deadtime-compensating controller whose prediction is based on the controller output and an internal simulation of the process.
+
+
–∑
SP
PVOP
PI controller Process
Model
Model without
deadtime
Figure 2 Smith Predictor schematic

3CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
A systematic identification process is required to obtain the process model and, as a minimum, the process gain, time constant and deadtime must be specified. Combined with the PI algorithm, there are up to 5 parameters to tune and unlike standard PID control, it is not something that can be tuned manually by trial and error.
Replacing a PID controller with a Smith Predictor results in a significant increase in operator complexity. This is perhaps one of the reasons why many processes with long deadtimes continue to be controlled by standard PI controllers.
—ControlMaster process controllers
ControlMasters feature an optional deadtime compensation controller providing an easy-to-use solution for deadtime processes. It is given the name Predictive PI control and is based on work originally done by Tore Hagglund of Lund University in Sweden.
The structure of the controller is the same as the Smith Predictor, but the key difference is that two of the process model parameters are determined automatically, based on the proportional and integral values.
+
+
–∑
SP
PVOPPI controller Process
ModelDeadtime
P
I
Model without
deadtime
Figure 3 ControlMaster predictive PI controller
This means that, as for a standard PID controller, there are just 3 parameters to be tuned – the proportional term, the integral term and an estimate of the process deadtime.
ControlMaster is configured easily as a deadtime controller, using the predictive control option available in the extended functionality build option.

4 CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
—Configuring ControlMaster for predictive control
Configuration of the controller begins in the same way as any other process. An application template and the control output type required are first selected then inputs and process alarms configured in the usual way. The difference in configuration comes when the control parameters are configured.
1 Enter the Control page:
2 Select Loop 1 Control:
3 Select Control type:
4 Select ‘pPI’ to enable predictive control:
5 Press (OK) then press and hold (Back) to return to the operator screen.
Entering the PID parametersThe next step is to enter the PID parameters. The pPI controller is easy to tune, first by performing a process step response test and then setting the controller’s parameters by observation. After tuning, the pPI controller can be adjusted manually.
1 Press to place the controller in manual mode.
2 Ensure the controller is in a steady state condition.
3 Apply a step change to the output and record the process variable response (for example, retransmit the PV to an SM500F paperless recorder and review the data with DataManager Pro) then draw a tangent at the point of maximum rate of change:
OP
PV
U0
Y0
U1
t0 t1t2
Y1
Figure 4 PID response graph
4 Calculate the following values from the response curve to determine the proportional, integral and deadtime values:
U0 = neutral output valueU1 = new output value (after change)Y0 = starting PV valueY1 = settled PV value after output changeT0 = time at which step change is madeT1 = time at which PV starts to respondT2 = time at which tangent intersects the final PV
value (Y1)
Note. Y0 and Y1 are expressed as a percentage of the engineering range.
By using these values to determine the 4 key parameters (L, T, ∆Y and ∆U), the 3 process parameters static gain (Kp), dominant time constant (Tp) and deadtime (Lp) can be determined.

5CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
Calculating the proportional band (Pb)The first step in calculating the proportional band is to determine the static gain (Kp) of the system. Kp is the ratio between the step change in the output (∆Y) and the response change in the PV (∆U) and can be determined as follows:
1 Calculate the change in the output using the equation:∆Y (output change) = Y1 – Y0
2 Calculate the change in the process using the equation:∆U (PV change) = U1 – U0
3 Find the static gain (Kp) of the system using the equation:
Kp = ∆Y∆U
4 Calculate the proportional band using the equation:Pb = 100 × Kp
Calculating the integral time (Tp)Referring to Figure 4, the integral time is the difference between the point at which the process begins to respond to the step change (t1) and the point (t2) where the tangent intersects the process value (Y1) and is calculated using the equation:
Tp = t2 – t1
Calculating the deadtime (Lp)Referring to Figure 4, the deadtime is the difference between the time at which the step change was made (t0) and the time at which the process began to respond to that change (t1) and is calculated using the equation:
Lp = t1 – t0
Configuring the controller’s pPI valuesThe calculated values must now be entered into the controller. These can be found in the Control page, under the PID menu.
1 Enter the Control page:
2 Select Loop 1 Control:
3 Select PID:
4 Press (Edit) then use and to adjust the displayed value to match the calculated proportional band value (Pb):
Press (OK) then press to move to the Integral Time screen.

6 CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
—…Configuring ControlMaster for predictive control
…Configuring the controller’s pPI values5 Press (Edit) then use and to adjust the
displayed value to match the calculated integral time value (Tp):
Press (OK) then press to move to the Derivative Time screen.
Note. When configuring pPI control the calculated deadtime value (Lp) is entered in the Derivative Time parameter but is used by the controller’s internal calculation as deadtime.
6 Press (Edit) then use and to adjust the displayed value to match the calculated deadtime value (Lp):
Press (OK).
7 Configure any other process parameters as required. Once complete, press and hold (Back) to return to the operator screen and allow the ControlMaster to assume control of the process.

7CM 3 0, CM 5 0 A N D CM F 3 10 PH D OSI N G I N EFFLU ENT D ISCH A R G E | TD/R an d C/014 - EN R E V. B
—Benefits of predictive controlThe benefits of using the ControlMaster and predictive control in this type of application are clear:
• Simple to configure – with only 3 parameters to configure, ControlMaster
makes setting up any application quick and simple.• Minimizes overshoot
– predictive control brings the process under control faster by minimizing overshoot, providing more process stability
• Reduces oscillation – predictive control reduces process oscillation, making
it more efficient• Accurately controls effluent chemical levels
– minimizes potential legal issues and/or fines related to effluent discharge

TD
/Ran
dC
/014
-EN
Rev
. A
01.
2019
—ABB Limited Measurement & Analytics Howard Road, St. Neots Cambridgeshire, PE19 8EU UK Tel: +44 (0) 870 600 6122 Fax: +44 (0)1480 217 948 Email: [email protected]
ABB Inc. Measurement & Analytics 125 E. County Line Road Warminster, PA 18974 USA Tel: +1 215 674 6000 Fax: +1 215 674 7183
abb.com/measurement
—We reserve the right to make technical changes or modify the contents of this document without prior notice. With regard to purchase orders, the agreed particulars shall prevail. ABB does not accept any responsibility whatsoever for potential errors or possible lack of information in this document.
We reserve all rights in this document and in the subject matter and illustrations contained therein. Any reproduction, disclosure to third parties or utilization of its contents – in whole or in parts – is forbidden without prior written consent of ABB.
© 2019 ABB.All rights reserved.







![Cross-Modal Relationship Inference for Grounding Referring ... · referring expressions [9, 23] is a fundamental one. Ground-ing referring expressions attempts to locate the target](https://img.pdfslide.us/doc/110x75/5f8cc988d44528010825b2ea/cross-modal-relationship-inference-for-grounding-referring-referring-expressions.jpg)