-
8/9/2019 A3M Mexico 8-13 for Publication
1/31
Permanently Installed Guided Wave
Pipeline Monitoring
A. Galvagni and A. Demma
Implementacion de sistemas de monitoreo
adentro de los planes de integridad
Mexico 22/8/2013
Alessandro Demma
-
8/9/2019 A3M Mexico 8-13 for Publication
2/31
A3Monitoring
Monitoring
ReducedRisk
Reducedcost
Improved
performance
Codecompliance
Asseteasily
managed
Companyimage
-
8/9/2019 A3M Mexico 8-13 for Publication
3/31
Implementation of monitoring
Integritystudy
Identify threatand target area
Feasibilitymonitoring
Select sensors+ parameters
Statisticalanalysis
DataFusion
-
8/9/2019 A3M Mexico 8-13 for Publication
4/31
Target areas ID by RBI or similar methodology
-
8/9/2019 A3M Mexico 8-13 for Publication
5/31
Define critical defect size
-
8/9/2019 A3M Mexico 8-13 for Publication
6/31
Feasibility
Which type of sensor could detect damage?UT
GW long range
GW short range
AE
Fibre optics
Etc..
How many sensors?
How frequent data gathering?
-
8/9/2019 A3M Mexico 8-13 for Publication
7/31
Both bare and buried pipes
3 inches and above
Temp from -10C to 120C
Mobile comms
.
UT monitoring on bare and buried pipes
Buried
Buried
-
8/9/2019 A3M Mexico 8-13 for Publication
8/31
UT monitoring high temp
-
8/9/2019 A3M Mexico 8-13 for Publication
9/31
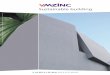
Long Range Guided Wave Monitoring
9
the GW sensor transmits a
torsional wave packetalong the pipe
Corrosion
Patch
damage, such as corrosion patches, cracks, etc.,
reflect a portion of the transmitted wave packet
back to the GW sensor in proportion to its cross-section
Weld
Cap
other pipeline features, such as flanges,
weld caps, supports, etc., also reflect a portion ofthe
transmitted wave packet back to the GW sensor
-
8/9/2019 A3M Mexico 8-13 for Publication
10/31
Long range GW Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
11/31
Short Range Guided Wave
-
8/9/2019 A3M Mexico 8-13 for Publication
12/31
Inspection vs Monitoring
Inspection concentrates on coveringmany areas
Monitoring concentrates on inspection of
critical or high risk/consequence areas
Monitoring can provide better sensitivity,
reliability and efficiency if appropriately
used
-
8/9/2019 A3M Mexico 8-13 for Publication
13/31
GWhow to use multiple readings
13
call level is 6dB above noise, but at features call level is
undefined
1.0%
Sensitivity
-
8/9/2019 A3M Mexico 8-13 for Publication
14/31
Multiple Readings
14
several readings are collected from each GW sensor
-
8/9/2019 A3M Mexico 8-13 for Publication
15/31
Maximize monitoring benefit
15
Data shown here after compensation. When do you say that a
change is relevant?
For example the point at 600 days is acceptable or not? We deal
with this previously
unresolved challenge. Algorithm works also at supports, welds
and bends. Here weld example
?
-
8/9/2019 A3M Mexico 8-13 for Publication
16/31
Statistical Analysis
16
future samples outside change
thresholds is inconsistent with
baselines, i.e. CHANGE
future samples inside no changethresholds is consistent with
baselines, i.e. NO CHANGE
other future samples cannot be
classified, i.e.
MORE SAMPLES NEEDED
We can say if a change is relevant or not with assigned
confidence value
-
8/9/2019 A3M Mexico 8-13 for Publication
17/31
Sequential Analysis
17Guided Wave Pipeline Monitoring
What influences change / no change thresholds?
1. Number & quality of baseline samples. Environmental
compensation reduce baseline point variance, tightens
thresholds.
2. False call & detection probabilities. Lower false call
probabilities widen thresholds.
Higher detection probabilities tighten thresholds.
3. Number of current samples available.
More samples represent more evidence and tighten thresholds.
new current
samples
o
2% detection
target
-
8/9/2019 A3M Mexico 8-13 for Publication
18/31
Sequential Analysis
18Guided Wave Pipeline Monitoring
What influences change / no change thresholds?
1. Number & quality of baseline samples. Environmental
compensation reduce baseline point variance, tightens
thresholds.
2. False call & detection probabilities. Lower false call
probabilities widen thresholds.
Higher detection probabilities tighten thresholds.
3. Number of current samples available.
More samples represent more evidence and tighten thresholds.
new current
samples
o o
2% detection
target
-
8/9/2019 A3M Mexico 8-13 for Publication
19/31
Sequential Analysis
19Guided Wave Pipeline Monitoring
What influences change / no change thresholds?
1. Number & quality of baseline samples. Environmental
compensation reduce baseline point variance, tightens
thresholds.
2. False call & detection probabilities. Lower false call
probabilities widen thresholds.
Higher detection probabilities tighten thresholds.
3. Number of current samples available.
More samples represent more evidence and tighten thresholds.
new current
samples
o o o
2% detection
target
-
8/9/2019 A3M Mexico 8-13 for Publication
20/31
3. Number of current samples available.
More samples represent more evidence and tighten thresholds.
20 Current Samplesnow possible to detect target!
Sequential Analysis
20Guided Wave Pipeline Monitoring
What influences change / no change thresholds?
1. Number & quality of baseline samples. Environmental
compensation reduce baseline point variance, tightens
thresholds.
2. False call & detection probabilities. Lower false call
probabilities widen thresholds.
Higher detection probabilities tighten thresholds.
2% detection
target
-
8/9/2019 A3M Mexico 8-13 for Publication
21/31
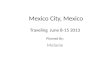
A3Monitoring Software analysis
21
Here there was a defect 0.75%
cross section loss
shieldCube automatically highlights zones of concern along the
pipeline and reports the
estimated cross-sectional area loss rate, subject to:The desired
confidence level.The
minimum cross-sectional area loss rate that is acceptable.
The algorithms of shieldCube guided wave monitoring have been
extensively field
tested.It has been proven during field trials that:For a given
number of readings,shieldCube maximises the probability of
detecting damage and corrosion.shieldCube
can predict in advance the minimum loss rate that can be
detected within a given period
of time and with a given number of readings.
-
8/9/2019 A3M Mexico 8-13 for Publication
22/31
A3Monitoring Software analysis online
22
-
8/9/2019 A3M Mexico 8-13 for Publication
23/31
shieldCube Thickness Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
24/31
shieldCube Thickness Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
25/31
shieldCube Thickness Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
26/31
shieldCube Thickness Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
27/31
shieldCube Thickness Monitoring
-
8/9/2019 A3M Mexico 8-13 for Publication
28/31
shieldCube Data Fusion
The data fusion concept stems from the recognition that
corrosion monitoring must rely on many different tools.
As in medical science, no single test can diagnose all
possible
Tools include:
Non-Intrusive Sensors
UT, LRGW, SRGW, etc.
Intrusive Sensors
ER, LPR, Coupons, ILI, etc.
Corrosion Models
-
8/9/2019 A3M Mexico 8-13 for Publication
29/31
Data Fusion is achieved by combining the effectdifferent
measurements have on the PDFs at eachnode.
Data Fusion
imagine associatingprobability density functionsto each node
-
8/9/2019 A3M Mexico 8-13 for Publication
30/31
The result is a heat map of the most likely corrosionrate,
remaining wall thickness and pit depth at allpositions along the
pipe, leveraging on all theinformation from sensors and models.
Data Fusion
-
8/9/2019 A3M Mexico 8-13 for Publication
31/31
How do you manage visually the monitoringinformation?