Embed Size (px)
Citation preview
A Wrapper-Based Approach to Image Segmentation and Classification
Michael E. Farmer, Member, IEEE, and Anil K. Jain, Fellow, IEEE
大綱大綱 IntroductionIntroduction Overview of the approachOverview of the approach Experiment: Vision-Base airbag suppression Experiment: Vision-Base airbag suppression
applicationapplication Experimental resultExperimental result

IntroductionIntroduction
Traditional processingTraditional processing
The traditional processing flow for image-based pattern recognition consists of image segmentation followed by classification.
Three limitations of traditional Three limitations of traditional processingprocessing
The object of interest “should be uniform and homogeneous with respect to some characteristic” and “adjacent regions should be differing significantly”
There are few metrics available for evaluating segmentation algorithms
Inability to adapt to real-world changes
The contributions in this paper
Developing a closed-loop framework for image segmentation to find the best segmentation for a given class of objects by using the shape of the object for classification of the segmented object
Using the probability of correct classification of the object to provide an “objective evaluation of segmented outputs”
The system can adapt to “real-world changes.”

Overview of the approachOverview of the approach
Wrapper-Based ApproachWrapper-Based Approach
Wrap the segmentation and the classification together, and use the classifier as the metric for selecting the best segmentation.
Using the classifier to intelligently re-assemble to solve over-segmented problem.
The classification is correct when the minimum distance between the classification of the candidate segmentation and one of the desired pattern classes < T
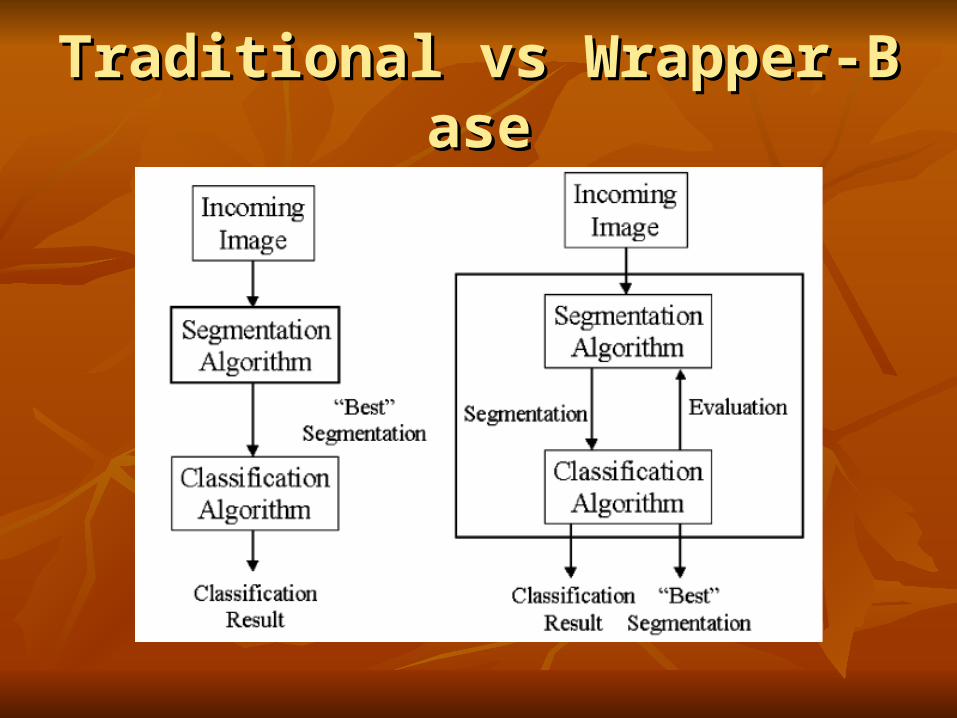
Traditional vs Wrapper-BaseTraditional vs Wrapper-Base
Experiment: Experiment: Vision-Base airbag suppression Vision-Base airbag suppression
applicationapplication
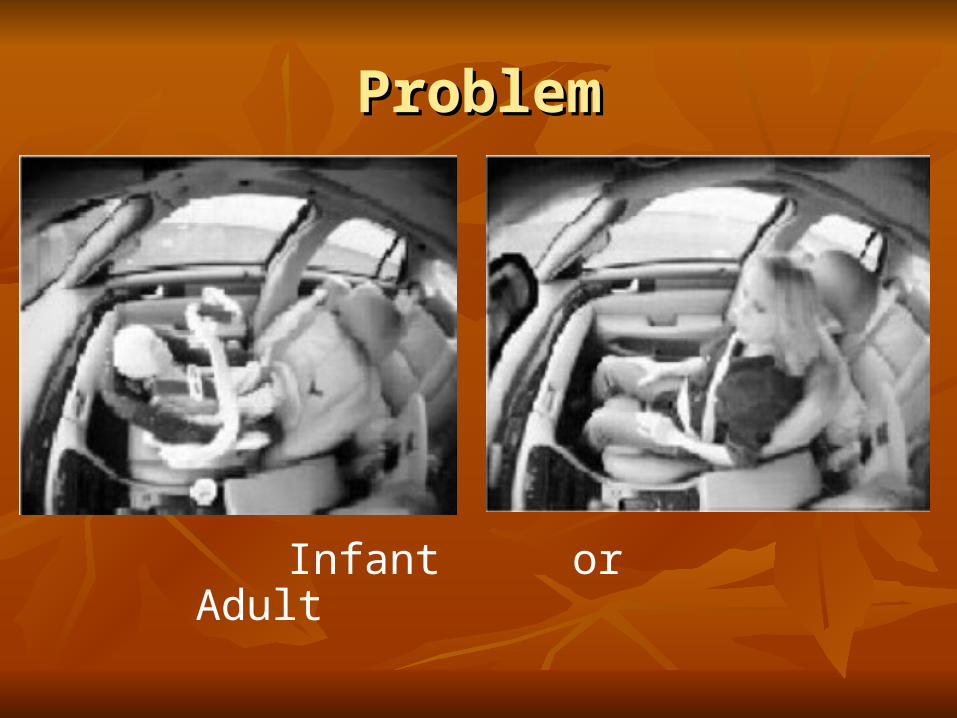
ProblemProblem
Infant or Adult
ChallengesChallenges
Nonuniform illumination Poor image contrast Shadows and highlights Occlusions Sensor noise Background clutter
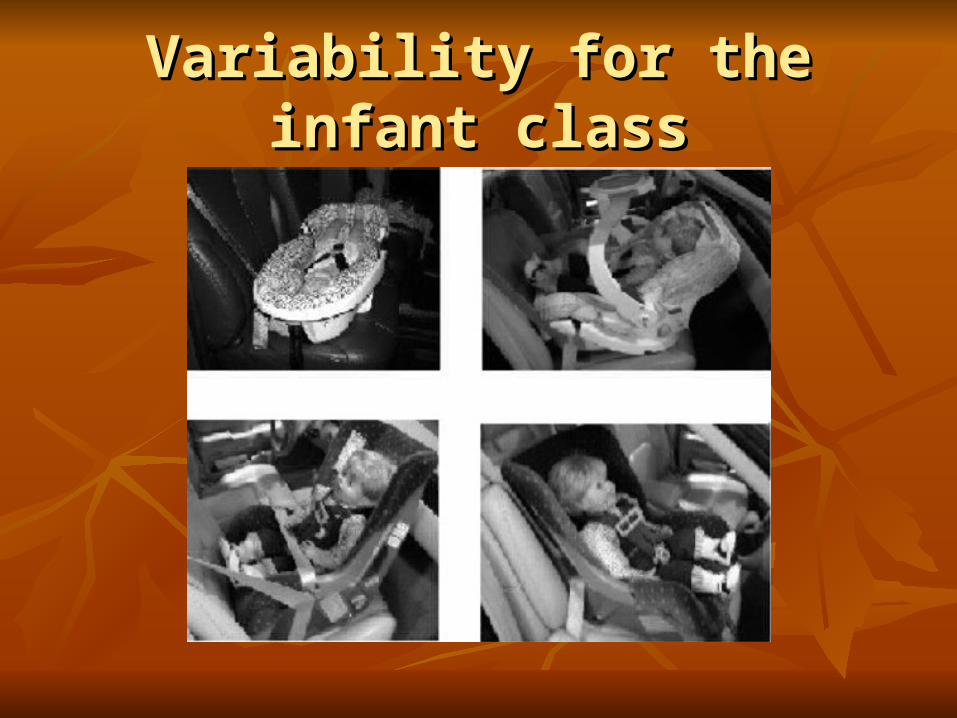
Variability for the infant classVariability for the infant class
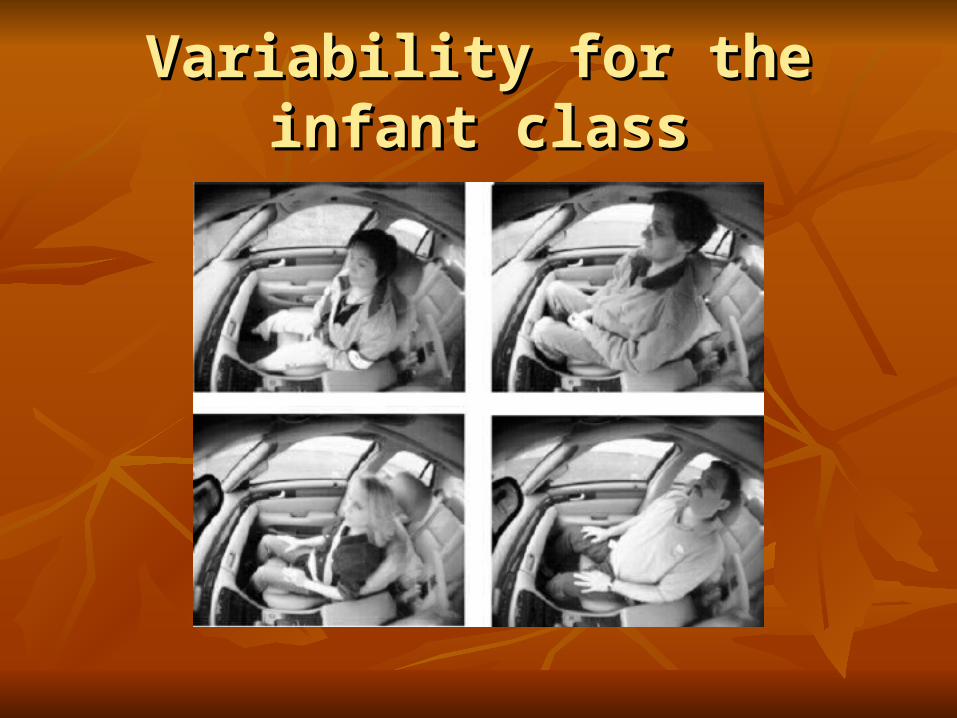
Variability for the infant classVariability for the infant class
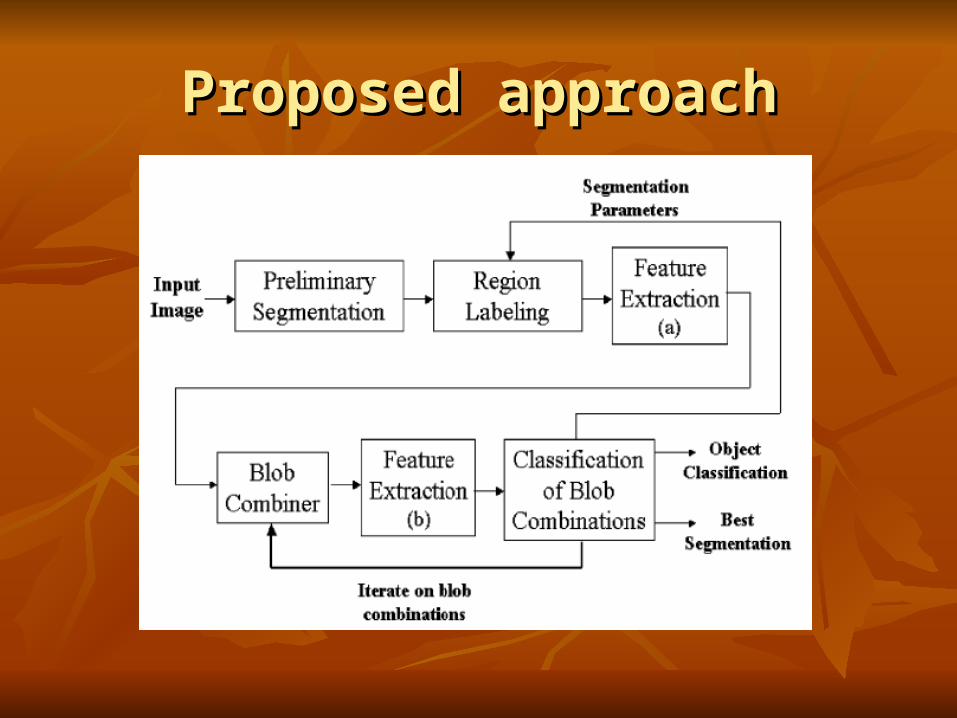
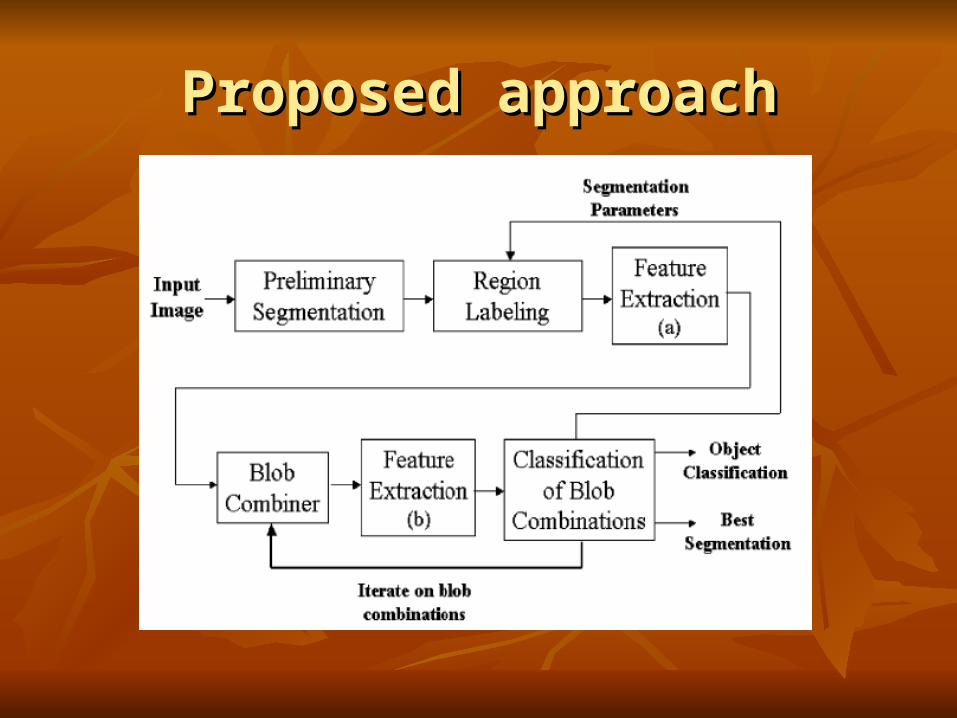
Proposed approachProposed approach
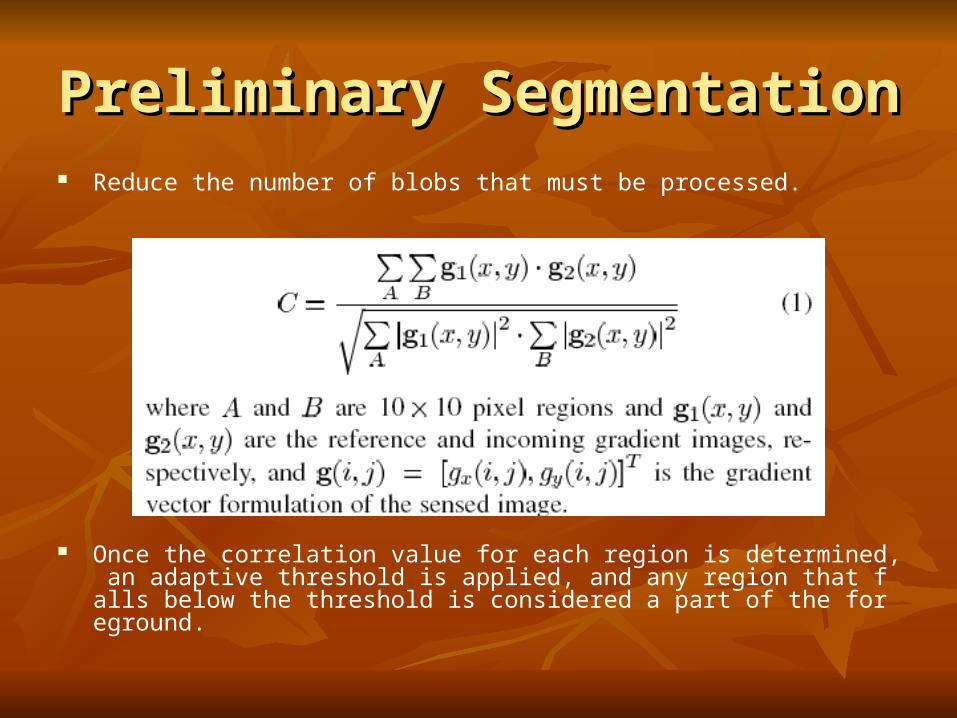
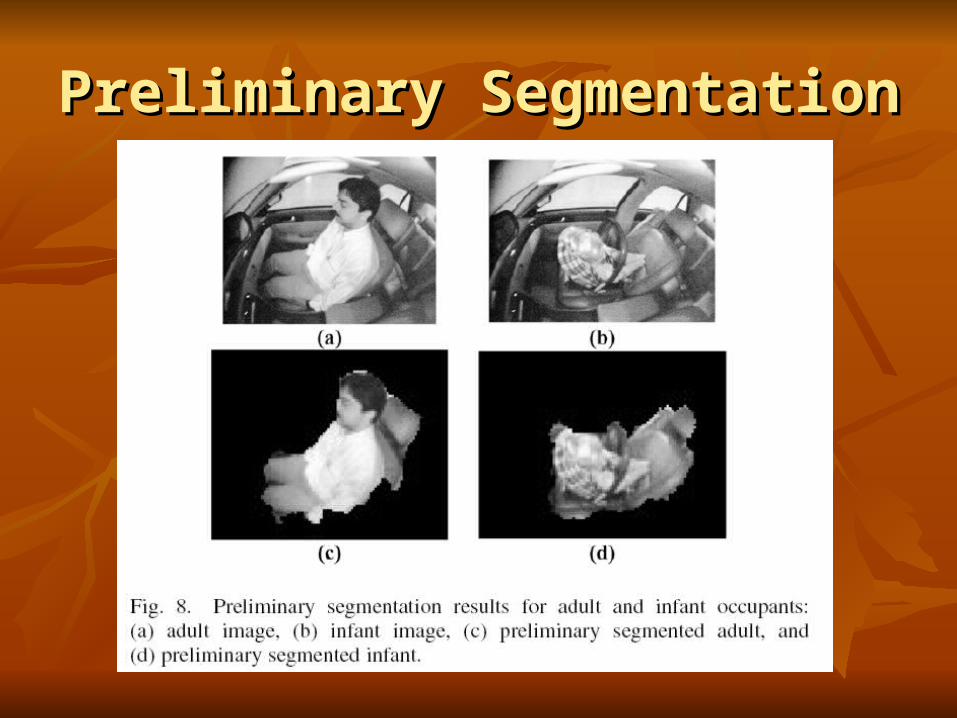
Preliminary SegmentationPreliminary Segmentation Reduce the number of blobs that must be processed.
Once the correlation value for each region is determined, an adaptive threshold is applied, and any region that falls below the threshold is considered a part of the foreground.
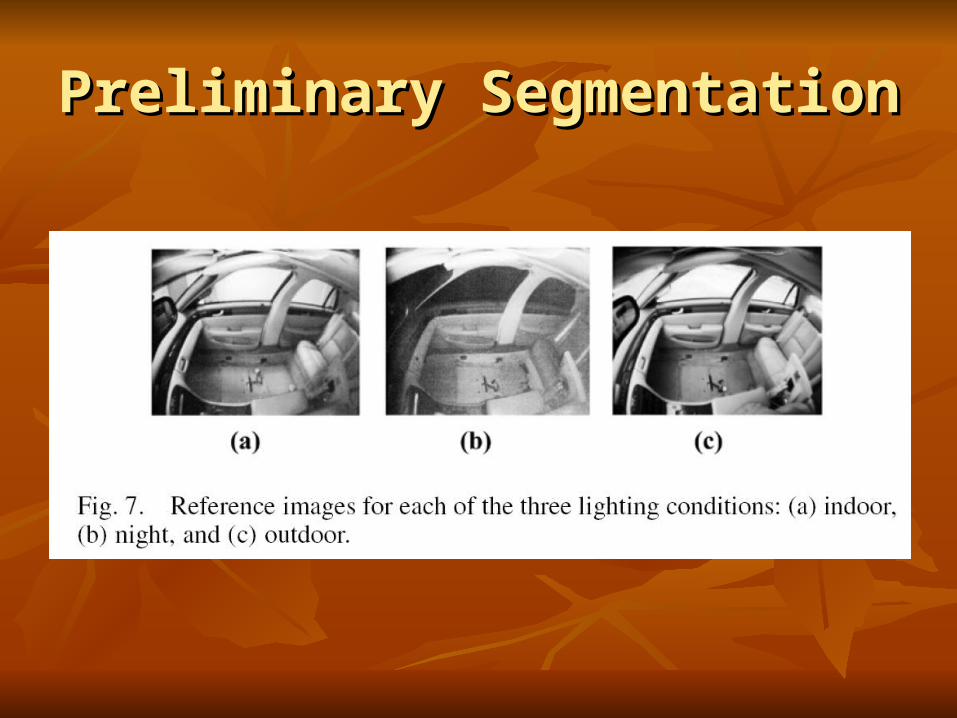
Preliminary SegmentationPreliminary Segmentation
Preliminary SegmentationPreliminary Segmentation
RegionRegion LabelingLabeling
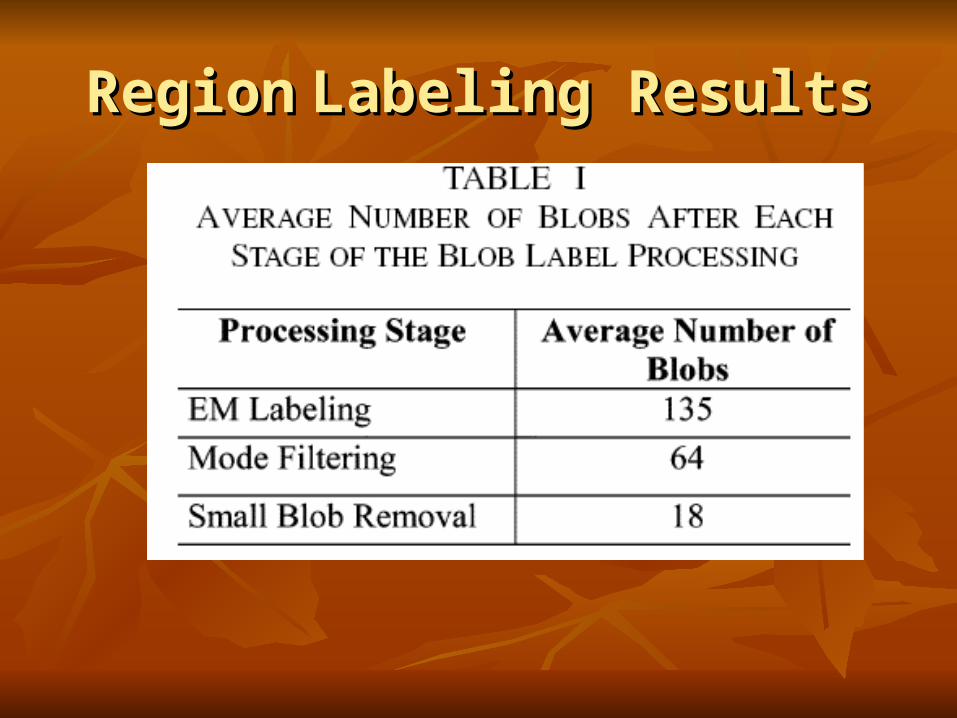
Using the EM algorithm with a fixed number of components, and then rely on the classification accuracy to determine if more components are required.
Merging the very small blobs by mode filter Merging any regions that are smaller then 20
pixels in size with their larger neighbors
RegionRegion Labeling ResultsLabeling Results
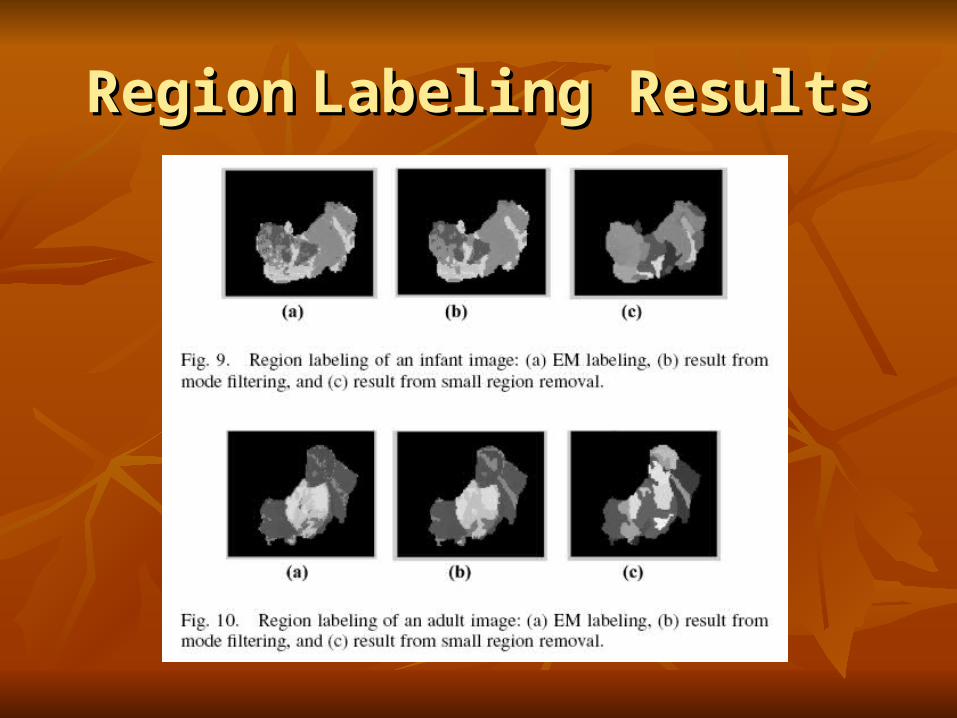
RegionRegion Labeling ResultsLabeling Results
Blob CombinerBlob Combiner
We have framed the blob combiner problem as one of blob selection, where there exists a subset of blobs that will provide the highest classification accuracy for a given pattern class
Forward selection modeForward selection mode Backward selection modeBackward selection mode
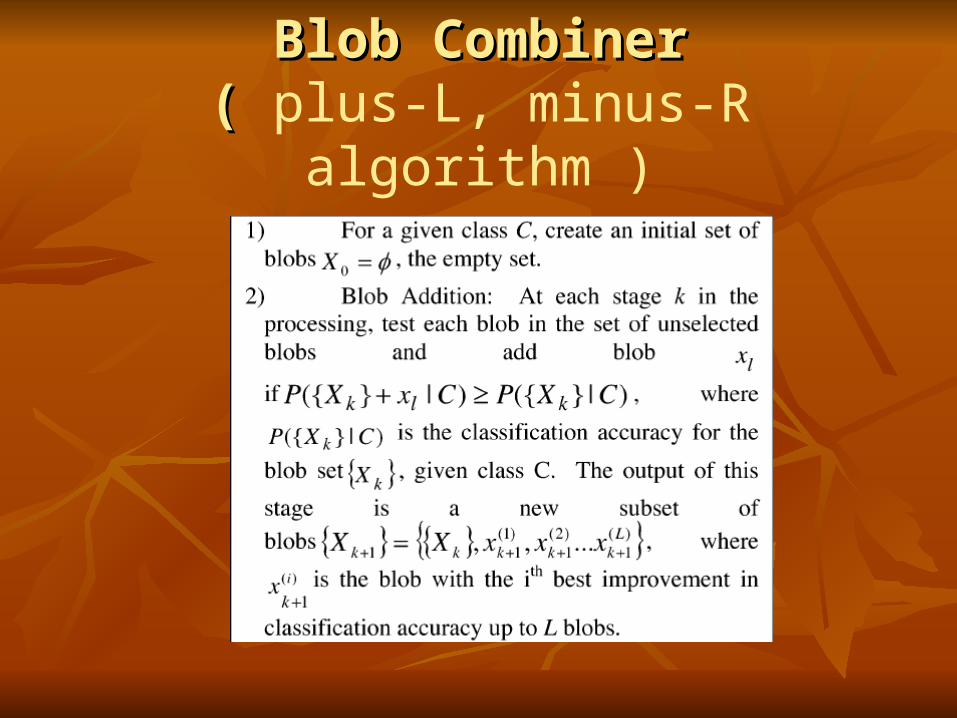
Blob CombinerBlob Combiner( ( plus-L, minus-R algorithm )
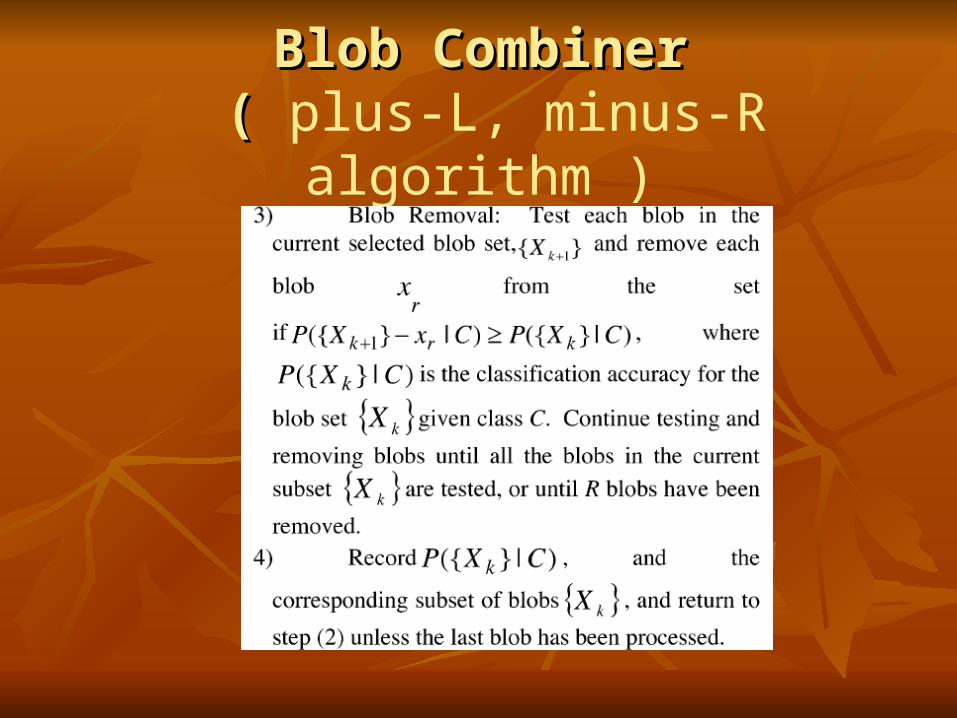
Blob CombinerBlob Combiner ( ( plus-L, minus-R algorithm )
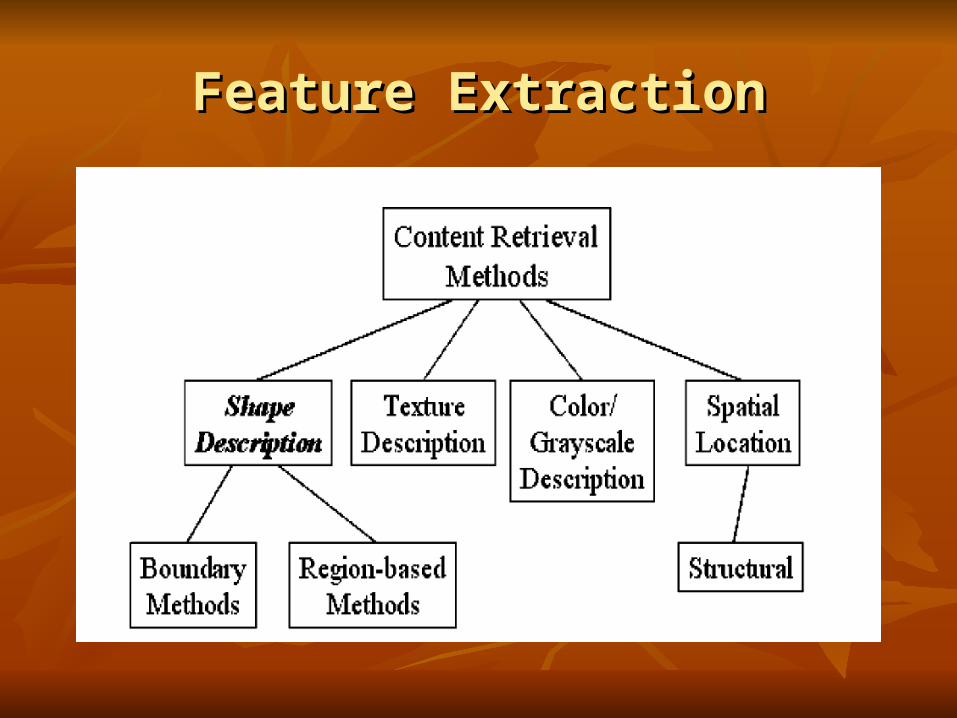
Feature ExtractionFeature Extraction
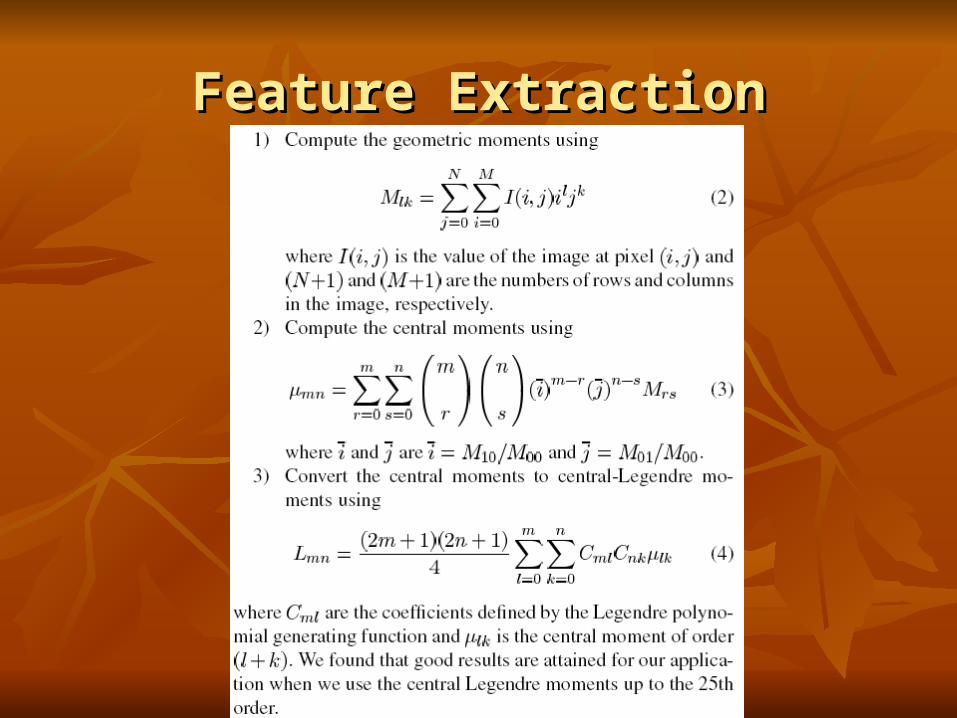
Feature ExtractionFeature Extraction
Acceleration Methods forAcceleration Methods for Feature Extraction Feature Extraction:
Precompute the moments for each blob Compute the moments using only the local nei
ghborhood of each blob.
Attain over a ten thousand-fold reduction in processing for each moment calculated.
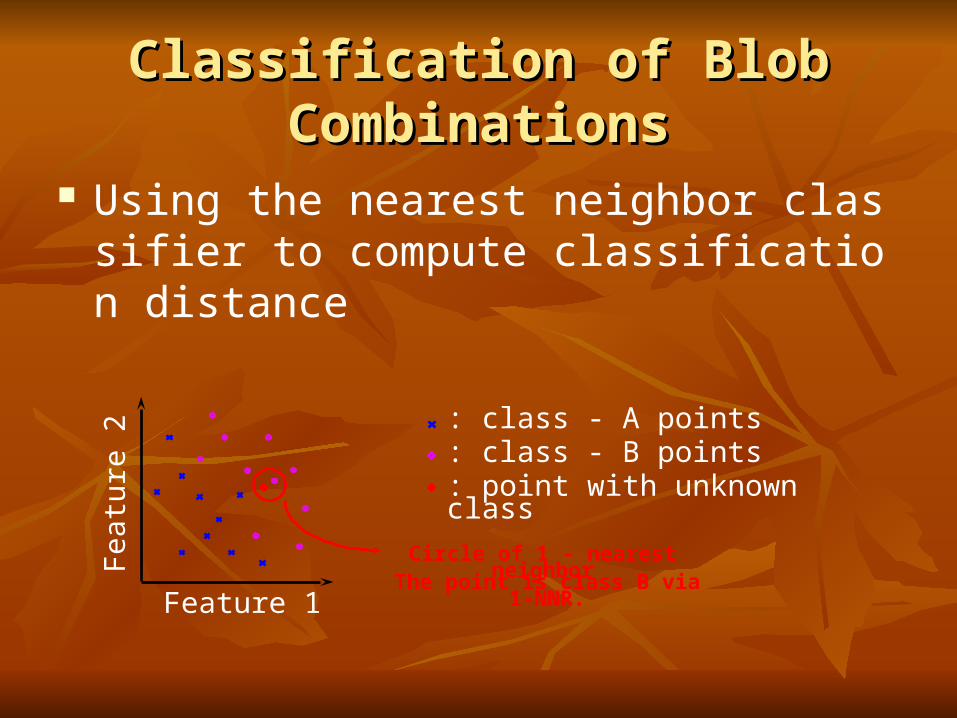
Classification of Blob CombinationsClassification of Blob Combinations
Using the nearest neighbor classifier to compute classification distance
Feature 1
Fea
ture
2
: class - A points: class - B points: point with unknown class
Circle of 1 - nearest neighborThe point is class B via 1-NNR.
Proposed approachProposed approach
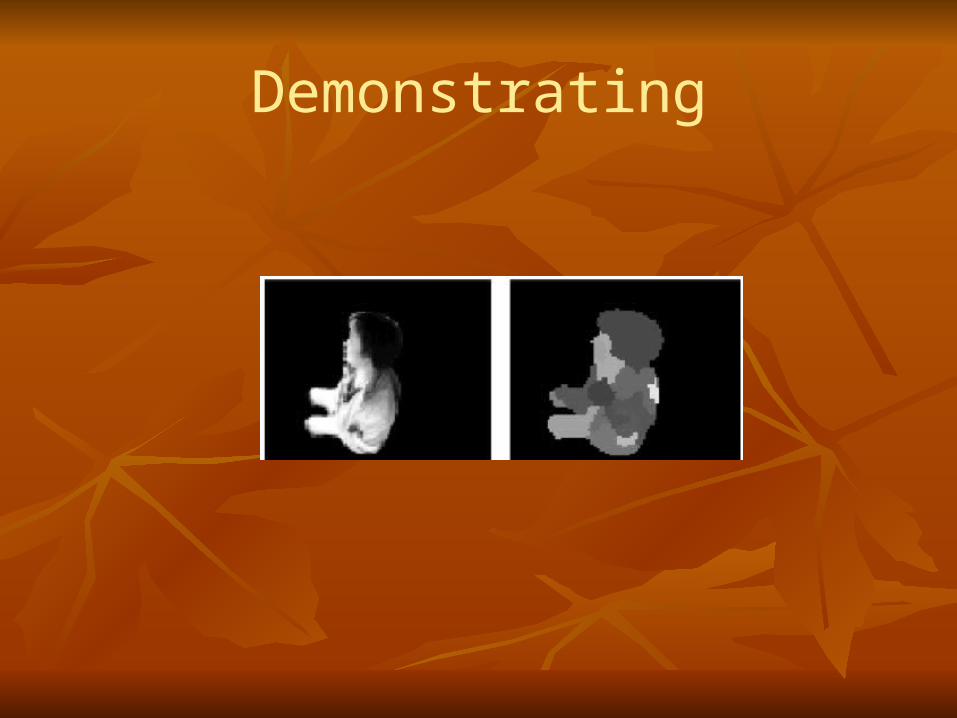
Demonstrating
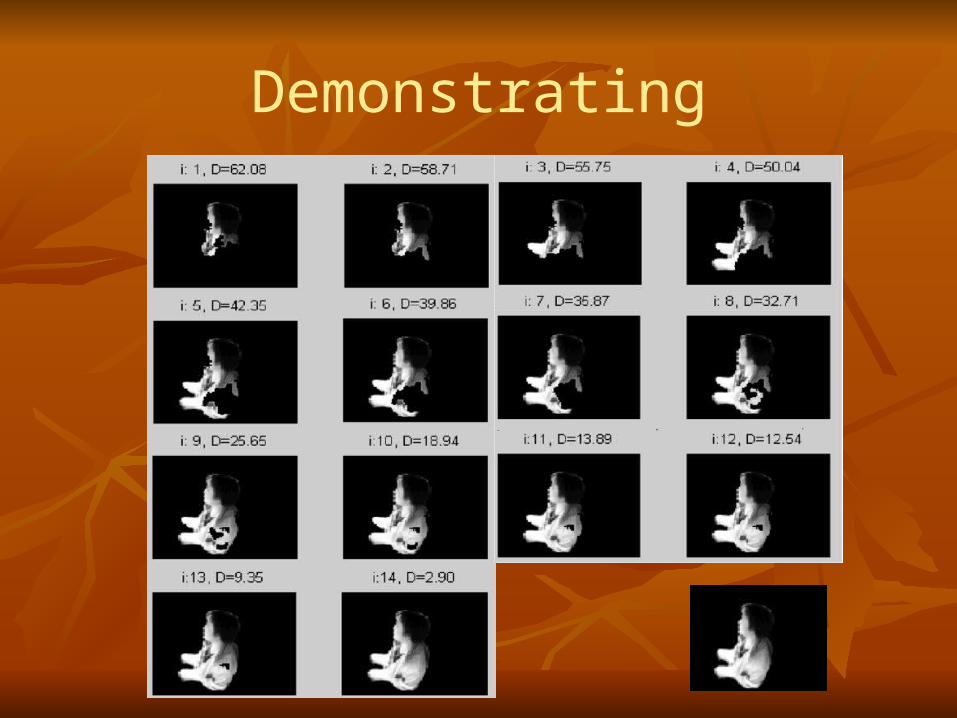
Demonstrating
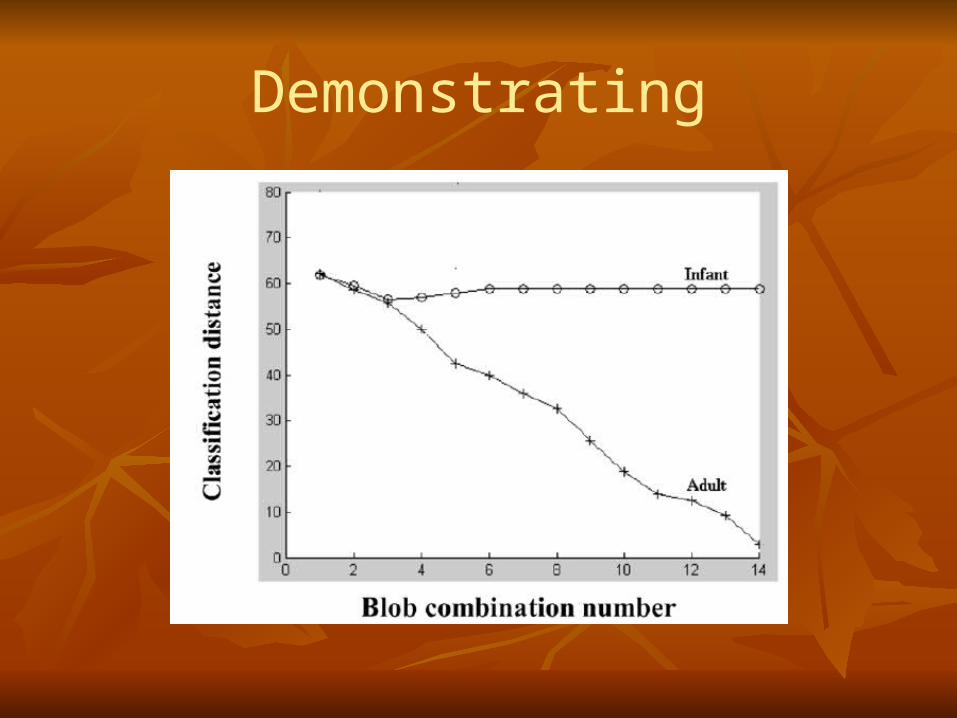
Demonstrating

EXPERIMENTAL RESULTS
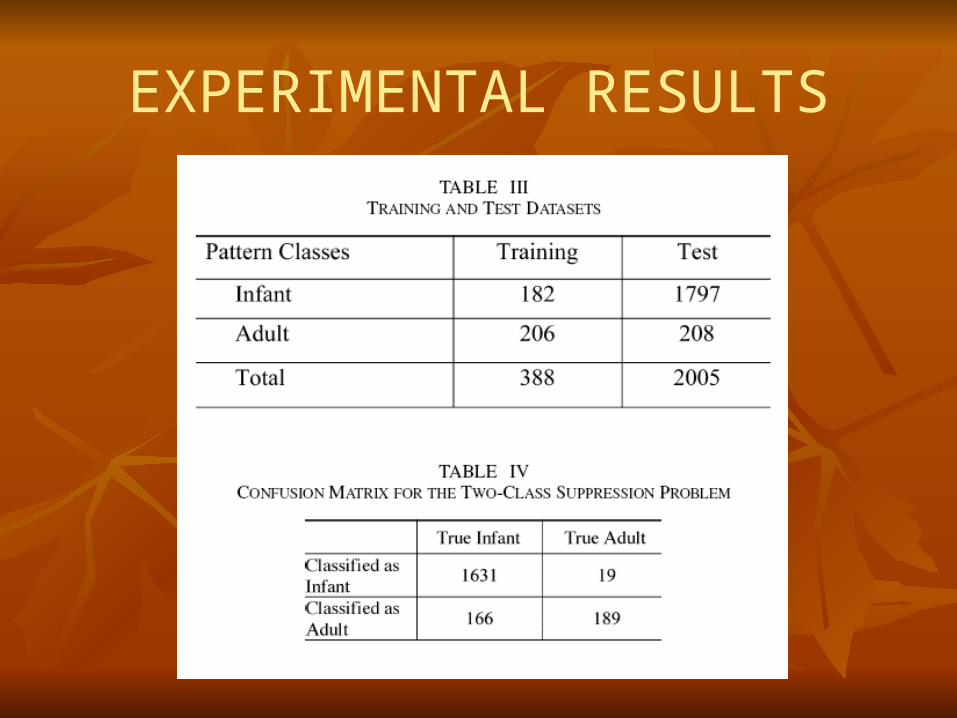
EXPERIMENTAL RESULTS
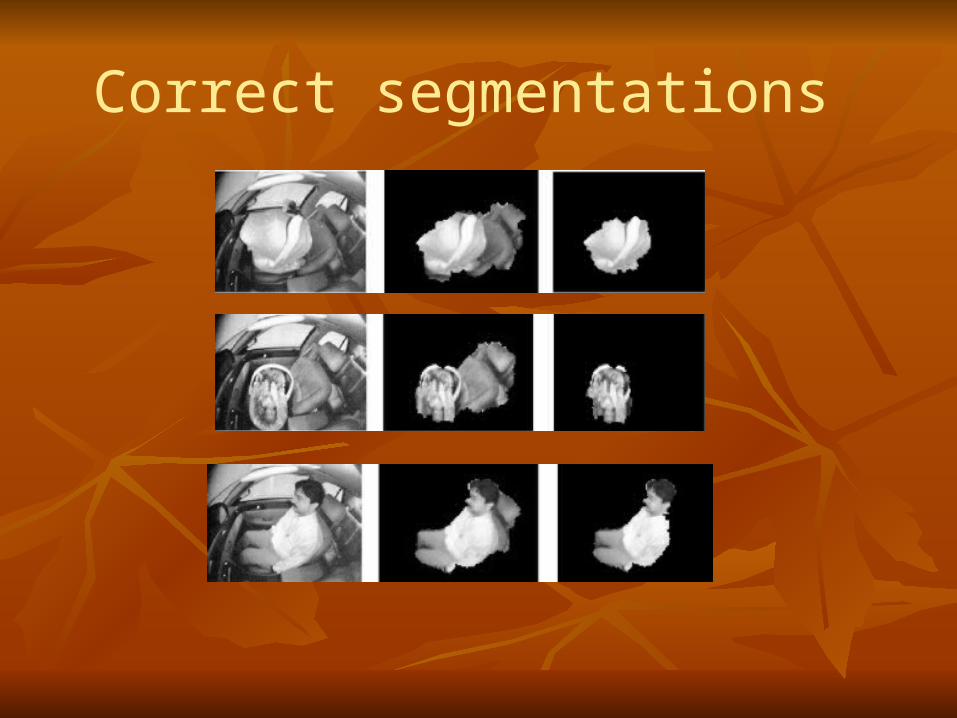
Correct segmentations
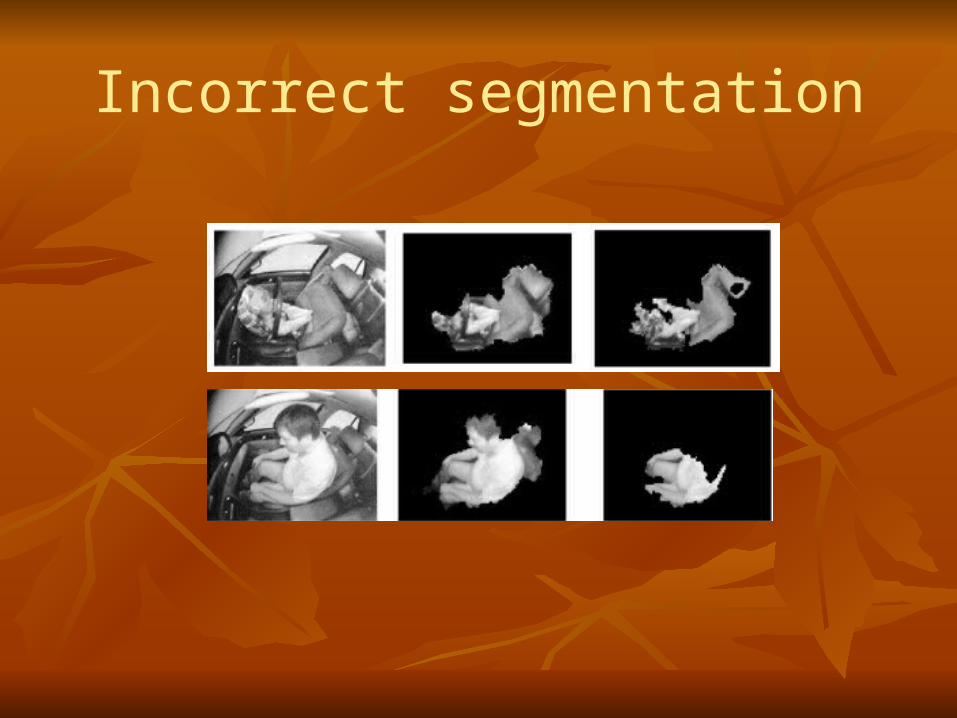
Incorrect segmentation