Embed Size (px)
Citation preview
A Universal Planar Manipulator
Dan S. Reznik & Prof. John Canny
UC-Berkeley
July, 2000

1 horizontal, rigid plate enough?
(x,y,)
1 2 3 4 5 6
-1
-0.5
0.5
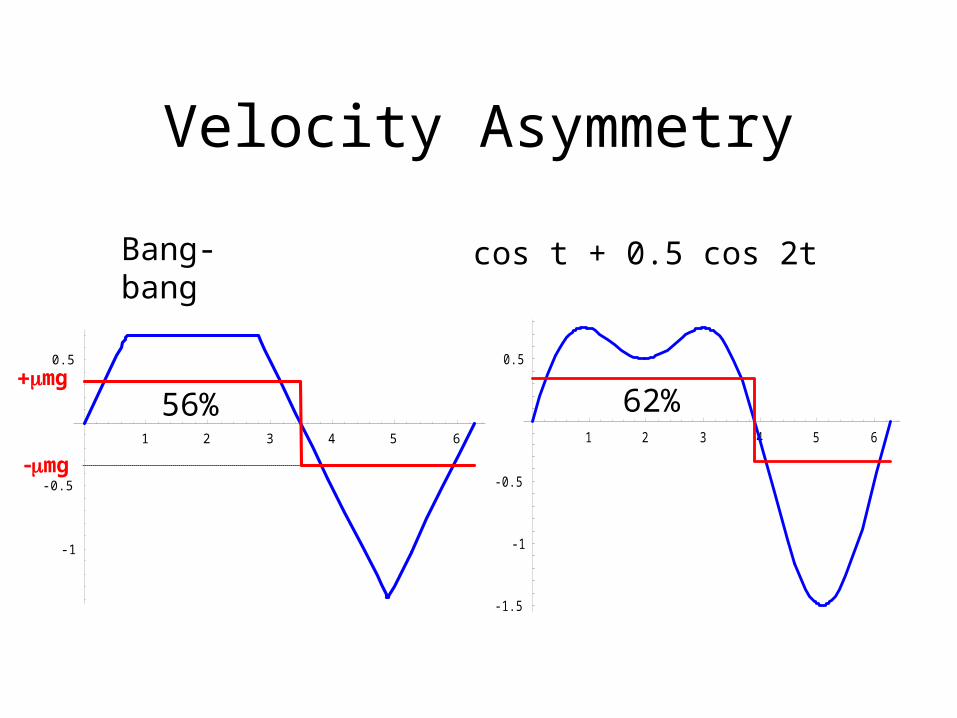
Velocity Asymmetry
1 2 3 4 5 6
-1.5
-1
-0.5
0.5
Bang-bang
62%56%mg
mg
cos t + 0.5 cos 2t
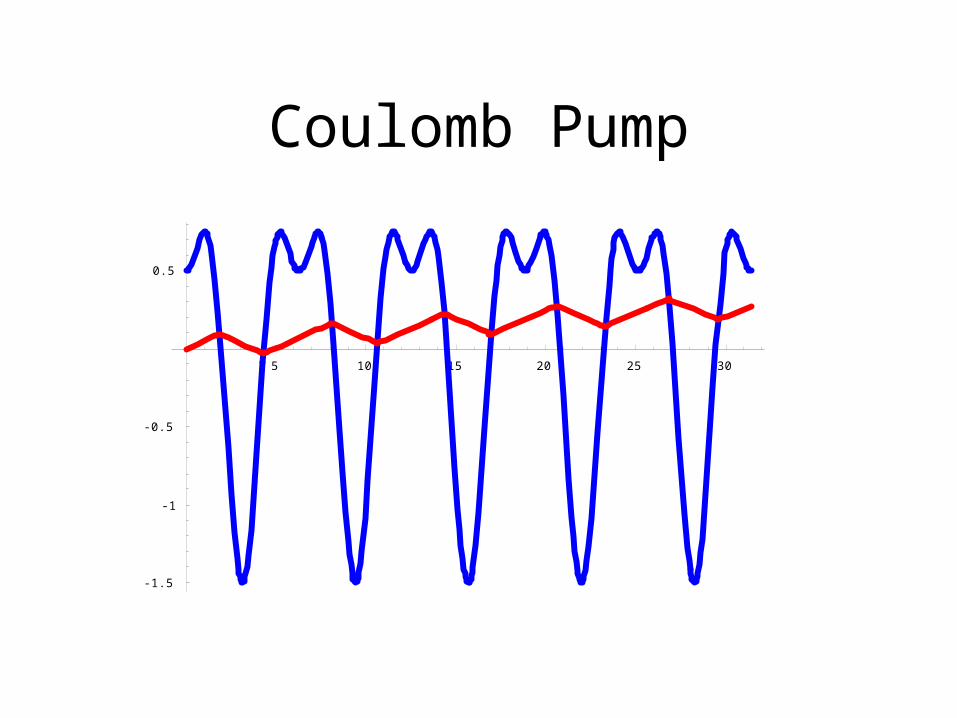
Coulomb Pump
5 10 15 20 25 30
-1.5
-1
-0.5
0.5

Straight-Line Feeding

Anything Goes
Interesting Apps
• Novel tangible UI’s– Force feedback with viscous feel– Active desk
• Fancy product displays– Rotate wine bottles
• Fluid-based micro manipulation

From 1d feedingto
2d parallel manipulation

Force: not closed!
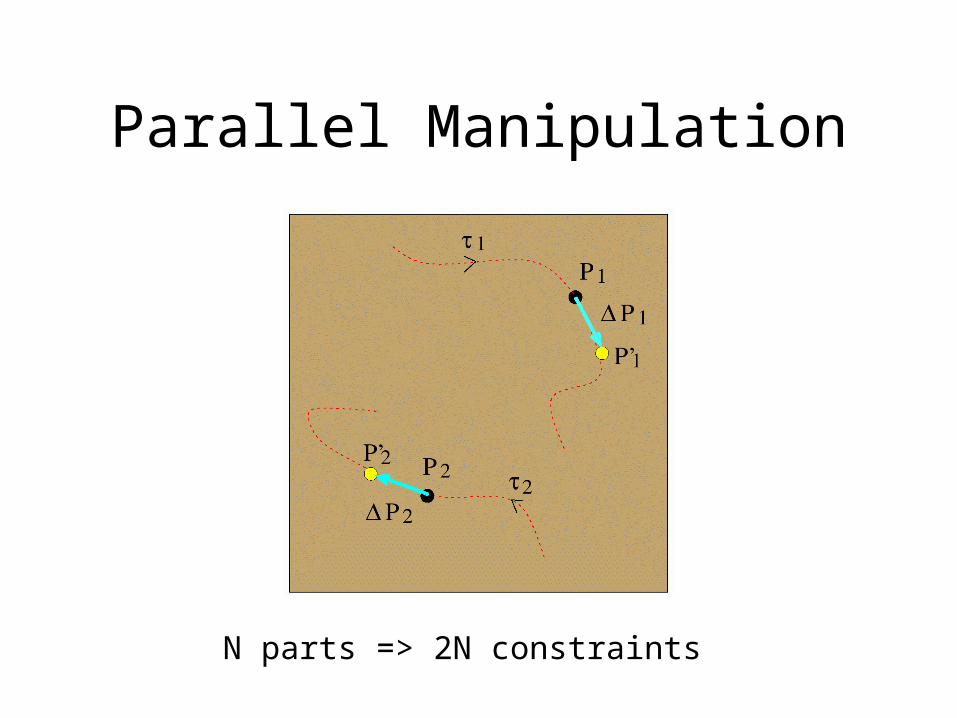
Parallel Manipulation
N parts => 2N constraints
Our Idea
• Horizontal Plate: 3 dof• Task: move N-parts• Proposal: Generate local fields
– Move parts almost one-by-one

“Local” Field
C-C
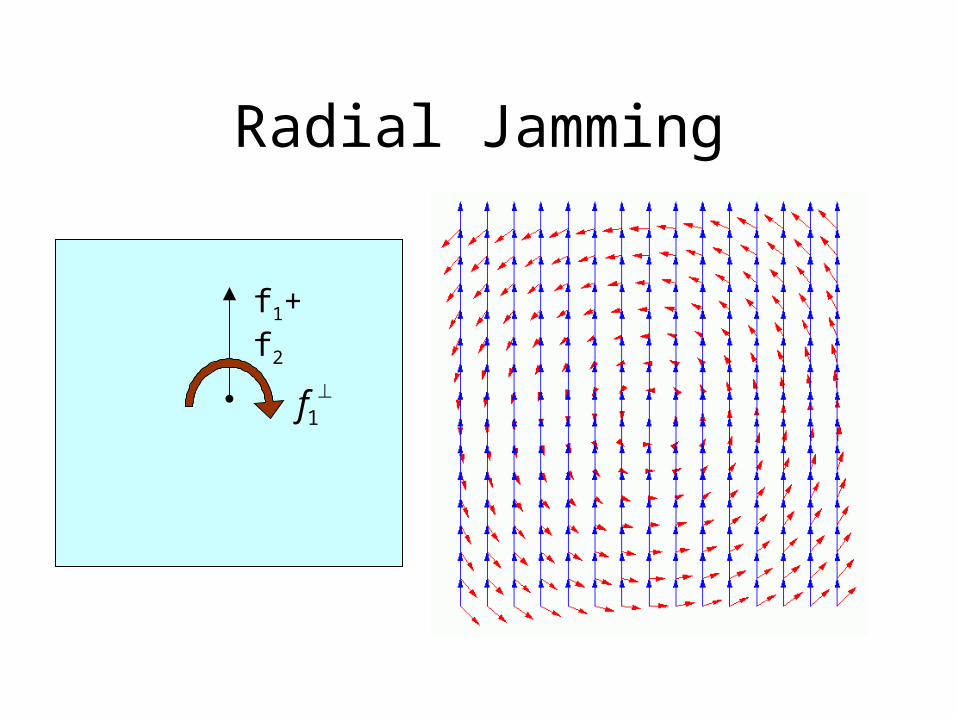
f1+f2
1f
Radial Jamming

Radial jamming Field
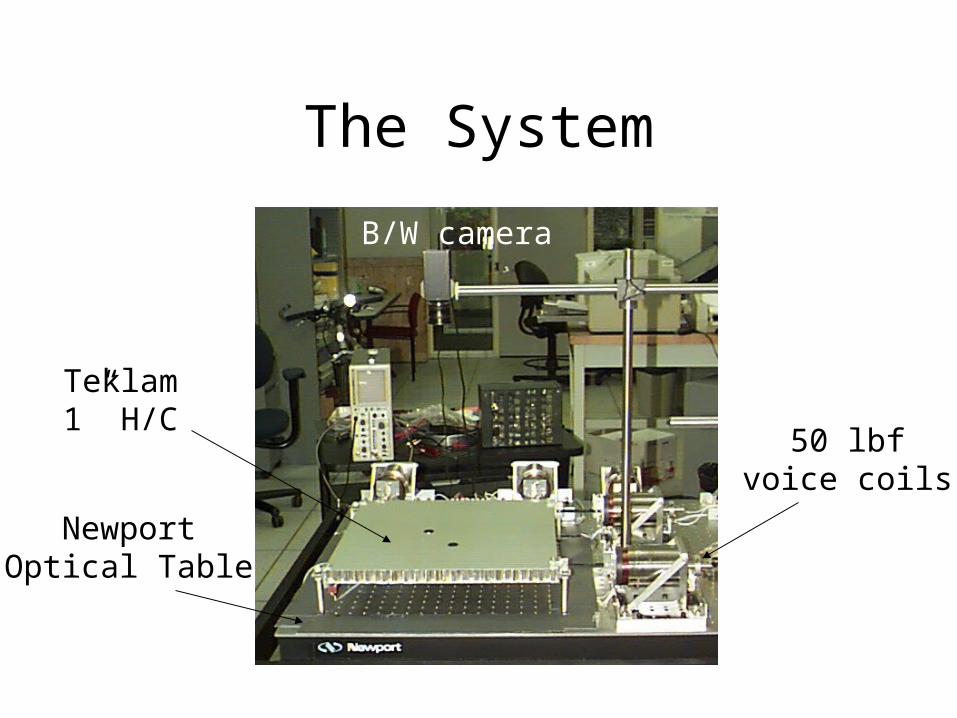
The System
50 lbfvoice coils
Teklam1” H/C
NewportOptical Table
B/W camera

PC Interface
videocapture
A/D
signalgeneration
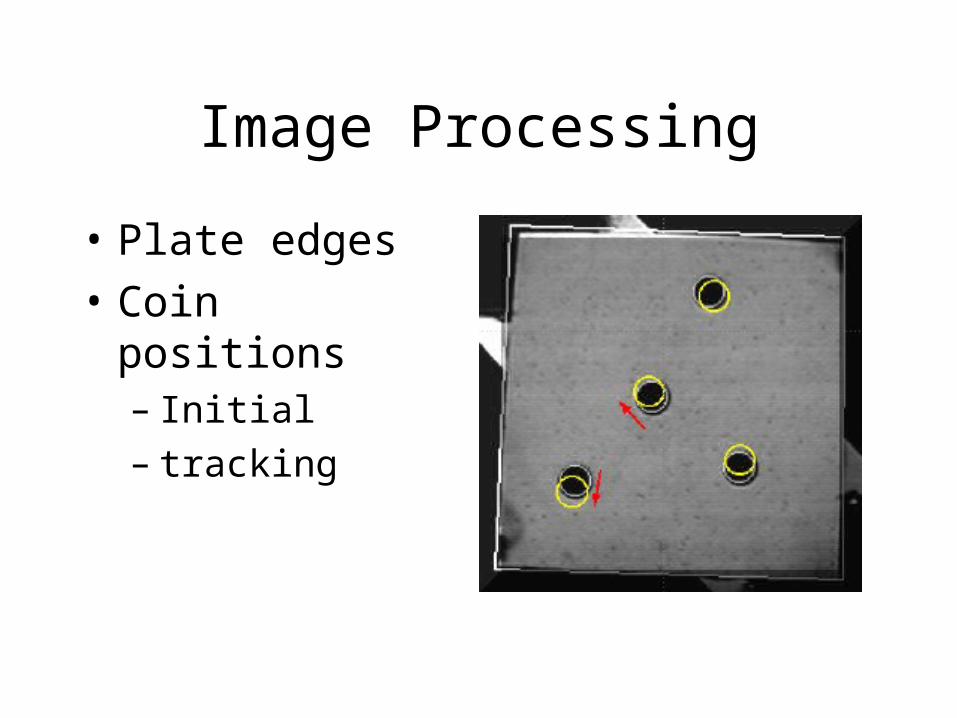
Image Processing
• Plate edges
• Coin positions– Initial– tracking

Bowtie
(vhs)

Sorter
Summary
• Motivation: simplest possible manipulator
• Use non-linearity of friction and asymmetric motion (few harmonics)
• Very general parallel manipulator
• Other suggested apps?





























