Upload
iglu43
View
245
Download
2
Embed Size (px)
Citation preview
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
1/18
A Tunin g S t ra tegy fo r Uncons t ra ined SISO Mode l P red ic t iveContro l
Rahu l Shr idha r and Doug las J . Cooper*
Chemical Engineering Department, University of Connecticut, U-222, Storrs, Connecticut 06269-3222
This paper present s an easy-to-use an d reliable tun ing strat egy for unconstr ained SISO dynamicmat rix control (DMC) and lays a found ation for extension to multivariable systems. The tu ningstrategy achieves set point tracking with minimal overshoot and modest manipulated inputmove sizes an d is applicable to a broad class of open loop stable pr ocesses. The der ivation of ananalytical expression for the move suppression coefficient, , and its demonstra tion in a DMCtun ing stra tegy is one of the significan t contr ibutions of this work. The compact form for thean alytical expression for is achieved by employing a first order plus dead time (FOPDT) modelapproximation of the pr ocess dynamics. With tuning pa rameters computed, DMC is th enimplemented in the classical fashion using a dynamic matrix formulated from step responsecoefficients of th e actua l process. J ust as t he FOP DT model appr oximat ion h as pr oved a valua bletool in tuning rules such as Cohen - Coon, ITAE, and IAE for PID implementations, the tuningstrategy presented here is significant because it offers an analogous approach for DMC.
In t roduc t ion
This paper details and demonstrates a tuning strategyfor single-input single-outpu t (SISO), unconstraineddynamic matrix control (DMC) (Cutler and Ramaker,1980, 1983) that is applicable to a wide ran ge of open-loop stable pr ocesses. The DMC control law is givenby
where A i s th e dynamic matr ix, ej is th e vector of predicted errors over t he next P sampling instants(prediction horizon), is the move suppression coef-ficient, an d uj is the manipulated input profile com-puted for t he next M sampling instan ts, also called thecontr ol horizon. The A T A matrix, to be inverted in theevalua tion of th e DMC control law, is referred to in th iswork as th e system matrix.
Implementation of DMC with a control horizon greaterthan one manipula ted input move necess ita tes theinclusion of a move suppression coefficient, (Maurathet a l., 1988a). This coefficient ser ves a dua l purp ose of conditioning the system matrix before inversion andsuppressing otherwise aggressive control action. It isoften u sed as the prima ry adjustable para meter t o fine-tun e DMC to desirable performa nce. Though the dualeffect of ha s been discussed by oth ers (e.g., Ogunn aike(1986)), past researchers have focused most attentionon th e lat ter effect in t he selection of .
This paper designs a n analytical expression that
computes an appropriate by recognizing and exploitingthe strong correlation between t he condition n umber of the sys tem matr ix , A T A , and resul tant manipula tedinpu t move sizes. The move suppr ession coefficient , ,which effectively modifies the condition number of thesystem matrix, is computed such that the conditionnumber is always bounded by a fixed low value. Byholding th e condition num ber a t a low value, desirableDMC closed-loop per formance is achieved while t hemanipula ted input move s izes are prevented frombecoming excessive.
The derivation of an ana lytical expression tha t com-putes and its demonstration in a DMC tuning strat egyis one of t he significant contributions of t his work.Table 1 illustrates the step-by-step procedure to com-pute the DMC tuning parameters, including the ana-lytical expression that computes , based on a user-specified control horizon and a given sample time.
Derivation of the an alytical expression for considersa first order plus dead time (FOPDT) approximation of the process dynamics. I t must be emphasized tha t th eFOPDT a pproximat ion is employed only in the deriva-tion of the analytical expression for . The examplespresented later in this work all use the traditional DMCstep response ma trix of the actua l process upon imple-mentation.
The primary benefit of a FOPDT model approximation
is that i t permits derivation of a compact analyticalexpression for computing . Although a FOPDT modelapproximation does not capture all the features of somehigher-order processes, it often reasona bly describes th eprocess gain, overall time consta nt, and effective deadtime of such processes (Cohen an d Coon, 1953). In th epast, tuning strategies based on a FOPDT model suchas Cohen - Coon, IAE, an d ITAE h ave pr oved u seful forPID implementations. The tuning strategy presentedhere is significant because it offers an analogous ap-proach for DMC.
The theoretical details in this paper are organized asfollows: (i) the DMC t ra nsfer fun ction form is der ivedand from it the existence of a gain-scaled move sup-pression coefficient is established; (ii) an approximationof the scaled system m at rix, A T A , is obtained from theDMC contr ol law; (iii) formulas for the maximum an dminimum eigenvalues of the gain-scaled ( A T A + I )ma trix ar e developed an d an expression for its conditionnu mber is obta ined; (iv) based on t his expression for t hecondition number, an analytical expression for comput-ing the move suppression coefficient is derived and anoverall DMC tun ing stra tegy is formulat ed; (v) a stra ight-forward extension of this t uning st rat egy to multivari-able systems is proposed; and (vi) issues important tothe implementat ion of the tun ing strategy are discussedwith guidelines for selection of the sample time and thecontrol horizon.
Through demonstrations of several simulation ex-
* Author to whom correspondence sh ould be addressed.Phone: (860) 486-4092. Fa x: (860) 486-2959. Ema il: [email protected].
uj ) ( A T A + I )- 1 A Tej (1)
72 9 Ind. Eng. Chem. R es. 1997, 36, 72 9 - 74 6
S0888-5885(96)00428-9 CCC: $14.00 1997 American Ch emical Society
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
2/18
amples that encompass a range of process characteris-t ics , th e tuning s t ra tegy is validated for set pointtracking performan ce using different choices of thecontr ol horizon and sampling rates. The tuning stra tegyis furt her va lidated for disturban ce rejection. An ex-ample application that validates an extension to thetun ing strat egy applied to mu ltivariable systems is alsopresented.
B a c k g r o u n d
Model predictive cont rol (MPC) has esta blished itself over the past decade as an industrially important formof advanced contr ol. Since the semina l publication of Model Predictive Heuristic Control (later Model Algo-r i thmic Control ) (Richalet e t a l ., 1976, 1978) andDynamic Matrix Control (Cutler and Ramaker, 1980,1983), MPC h as ga ined widespread a cceptan ce in aca-demia and in industry. Several excellent technicalreviews of MPC r ecoun t t he significant cont ribut ions inthe past decade and detail the role of MPC from anacademic perspective (Garc a et al., 1989; Morari andLee, 1991; Ricker, 1991; Muske and Rawlings, 1993) andfrom an industrial perspective (Richalet, 1993; Clarke,1994; Froisy, 1994; Cama cho an d Bordons, 1995; Qinand Badgwell, 1996).
MPC r efers t o a family of controllers th at employs adistinctly ident ifiable model of th e pr ocess to pr edict itsfuture behavior over an extended prediction horizon. Aperformance objective to be minimized is defined overthe prediction horizon, u sually a s a sum of quadraticset point t racking error and contr ol effort terms. Thiscost function is minimized by evaluating a profile of man ipulated input moves to be implemented a t su cces-sive sampling insta nts over the control horizon. Closed-loop optimal feedback is a chieved by implemen ting onlythe f i rs t manipula ted input move and repeat ing thecomplete sequence of steps at the subsequent sampletime. This moving horizon concept of MPC, where th econtroller looks a finite t ime into the futur e, is i l-lustrated in F igure 1.
Dynamic matr ix control is a rguably the most popularMPC algorithm currently u sed in t he chemical processindustr y. Qin and Ba dgwell (1996) reported about 600
successful applications of DMC. It is not surpr ising whyDMC, one of the earliest formulations of MPC, repre-sents the industrys stan dard t oday. A large part of DMCs appeal is drawn from an intuitive use of a finitestep response (or convolution) model of the process, aqua dra tic performa nce objective over a finite predictionhorizon, and optimal manipulated input moves com-pu ted a s the solu t ion to a least squa res p rob lem.Because of its popularity, this work focuses on an overalltuning strategy for DMC.
Another form of MPC that has rapidly gained ac-ceptance in the control communi ty i s GeneralizedPredictive Control (GPC) (Clarke et al., 1987a,b). Itd iffers from DMC in that i t employs a control ledautoregressive and integrated moving average (CA-
Table 1 . DMC Tuning S t ra tegy
1. Approximat e th e process dynamics with a first order plus dead t ime (FOPDT) model:
y(s)u (s )
) K pe- ps
ps + 12. It is desirable but not necessary to select a value for the sampling interval, T . If possible, select T as th e largest value that satisfies
T e 0.1 p and T e 0.5 p3. Calculate the discrete dead time (rounded to the next integer):
k ) p / T + 14. Calculate the prediction horizon and the model horizon as the process settling time in samples (rounded to the next integer):
P ) N ) 5 p / T + k 5. Select the control horizon, M (integer, u sually from 1 t o 6) and calculate the move suppression coefficient:
f ) {0 M ) 1 M 500(3.5 pT + 2 - ( M - 1)2 ) M > 1 ) fK p
2
6. Implement DMC using the traditional step response matrix of the actual process and the following parameters computedin steps 1 - 5:
sample time, T model horizon (process settling time in sa mples), N prediction horizon (optimization horizon), Pcontrol horizon (number of moves), M move sup pres sion coefficient ,
Figure 1 . Moving horizon concept of model predictive control.
73 0 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
3/18
RIMA) model of the process which allows a rigorousmat hema tical trea tment of the predictive control para -digm. The GPC performa nce objective is very similarto that of DMC but is minimized via recursion on thediophan tine identity (Clarke et al., 1987a,b; Lalonde a ndCooper, 1989). Nevert heless, GPC reduces to the DMCalgorith m when th e weight ing polynomial tha t modifiesthe predicted output trajectory is assumed to be unity(McIntosh et a l., 1991). Ther efore, without an y loss of generality, the tuning strategy proposed in this paperis directly applicable to GPC.
Uncon s t ra ined SISO DMC. DMC does not alwayscompete with, bu t sometimes complements, classicalthree-term PID (proportional, integral, derivative) con-trollers. That is, it is often implement ed in advan cedindustrial control applications embedded in a hierarchyof cont rol fun ctions above a set of tr adit iona l PID loops(Prett and Garc a, 1988; Qin and Badgwell, 1996).
The unconstrained SISO DMC formulation consideredin this work (eq 1) does not unleash the full power of MPC. This restricted form of DMC does n ot allowmultivariable control while satisfying multiple processand performan ce objectives. However, the analysispresented h ere provides a foun dation upon which moreadvan ced tu ning stra tegies may be developed, and th isis i llustrated later in the work with an extension to atuning strategy for multivariable DMC.
In any event, unconstrained SISO DMC does offersome useful capabilities. For example, past compa risonstudies between u nconstr ained DMC and t raditional P Icontrol (e.g., Farrell and Polli, 1990) show that DMCprovides superior performan ce when distur bance tun ingdiffers significant ly from servo tun ing. DMC has alsodemonstra ted super ior performa nce in the case of plant -model mismatch, except for process gain mismat ch.
Additionally, incorporation of process knowledge inthe contr oller ar chitectur e provides DMC with a nticipa-tory capabilities and facilitates control of processes withnonminimum pha se behavior a nd large dead times. The
form of the performance objective provides a convenientway to balance set point tracking with control effort,leading to an intuitive tradeoff between performancean d robustn ess. Also, th e DMC form considered in thiswork a llows t he intr oduction of feed-forwa rd cont rol ina natural way to compensate for measurable distur-bances.
C h al le n g e s i n S IS O D MC Tu n i n g . Tuning of unconst ra ined and const ra ined DMC for SISO andmultivariable systems has been addressed by an arrayof researchers. In th e past, systema tic trial-and-errortuning procedures have been proposed (e.g., Cutler,1983; Ricker, 1991). Marchetti et al. (1983) presenteda detailed sensitivity a nalysis of adjustable para metersand their effects on DMC performance. The met hod of principal component selection was presented by Maurathet a l . (1985, 1988b) as a method to compute an ap-propriate prediction horizon and a move suppressioncoefficient (Callagha n a nd Lee, 1988). To simplify DMCtuning, Maurath et al. (1988a) also proposed the M )1 contr oller configura tion of DMC.
Other tuning strategies for DMC have concentratedon specific aspects such as tuning for stability (Garc aand Morari , 1982; McIntosh, 1988; Clarke and Scat-tolini, 1991; Rawlings and Muske, 1993), robustness(Ohshima et al., 1991; Lee and Yu, 1994), and perfor-mance (McIntosh et al., 1992; Hinde and Cooper, 1993,1995). Although some of the a bove methods provide acomplete design of DMC, they also require fairly so-
phisticated analysis tools and an advanced knowledgeof contr ol concepts for t heir implement ation. Hence,ther e still exists a n eed for ea sy-to-use t un ing stra tegiesfor DMC.
Tuning of unconstrained SISO DMC is challengingbecause of the number of adjustable parameters thataffect closed-loop performance. These include thefollowing: a finite prediction horizon, P ; a controlhorizon, M ; a move suppression coefficient, ; a modelhorizon, N ; and a sample t ime, T .
The first problem t hat needs to be addressed is theselection of an appropriate set of tuning parametersfrom am ong those available for DMC. Pr actical limita-tions often restrict the availability of sample time, T ,as a tuning parameter (Frankl in and Powel l, 1980;Astr om a nd Witten ma rk, 1984). The model horizon isalso not an appropriate tuning parameter since trunca-tion of the model horizon, N , misrepresents the effectof pas t moves in th e predicted output and leads toun pred icta ble closed-loop per form an ce (Lund str om etal., 1995).
S e n s i t i v it y S t u d y a n d F i n a l S e l e c t i o n o f D M CTu n i n g P a r a m e t e r s . Based on the above discussion,candidate parameters for developing a systematic tun-ing strategy for DMC include the prediction horizon, P ,the control horizon, M , and the move suppress ioncoefficient, . Though this simplifies the ta sk of sensi-tivity analysis, the appropriate choice of these param-eters is strongly dependent on the sa mple time and t henature of the process.
Over the past decade, detailed studies of DMC pa-rameters have provided a wealth of information abouttheir qualitative effects on closed-loop performa nce(Marchetti et al ., 1983; Garca and Morshedi, 1986;Downs et al ., 1988; Maura th et a l ., 1988a). In t hissection, a brief sensitivity study investigates the extentto which various para meters affect DMC performance.This study is targeted toward selection of appropriatetuning parameters for developing a DMC tuning strat-
egy.A base case process is employed to illustrate the effect
of adjustable parameters on DMC response for a stepchange in se t point (Figures 2 - 4). The base caseprocess has the transfer function
Figure 2 i l lustrates the importance of in tuningDMC with a control horizon greater than one manipu-lated input move. The sample time is selected for t hisbase case such that the T / p ratio is 0.1. This samplet ime to overa l l t ime constant ra t io l ies within therecommend ed ra nge for digita l cont rollers (Seborg, 1986;Ogunna ike, 1994). A FOPDT model approximat ion of the process described by eq 2 yields a process gain, K p) 1, an overall t ime constant , p ) 157, and effectivedead time, p ) 70. The prediction horizon an d modelhor izon are fixed a t 54 and represent the completesettling time of process 1 in sa mples.
Graph a of Figure 2 illustra tes th e response to a stepchange in set point when t he control horizon is 1 ( M )1) and no move suppression is used ( ) 0). Note thatfor M ) 1, the set point step response is sluggish an d a > 0 will only furth er slow t he process response.
process 1
G p(s) )e
- 50 s
(150 s + 1)(25 s + 1)(2)
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 73 1
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
4/18
Graphs b - d show the impact of on per form an ce fora control horizon of M ) 4. Graph b demonstrates that,with M > 1, the lack of move suppression results indramatically aggressive control effort and a significantlyunderdamped measured output response . Graph cshows tha t an intermediate response can be achievedby an appropriate choice of . Graph d shows tha t alarger move suppression coefficient ( ) 4.0) results ina slower response. Fur ther increasing can lead to anundesirable sluggish r esponse for most applications.Consequently, this study shows that the choice of iscritical to th e per forma nce achieved by DMC.
Figure 3 demonstrates the interdependence of predic-tion h orizon, P , and sam ple time, T . A ma trix of closed-loop response results is generated for different choicesof P and T while maintaining the control horizon, M ,an d m ove suppr ession coefficient , , constant . When theprediction horizon is altered, t he model horizon, N , isalways kept long enough to ensure that the DMC step
response model correctly predicts th e steady sta te. Byeliminating the truncation errors th at result when themodel horizon does n ot accoun t for th e pr ocess stea dystate, Figure 3 isolates the effect of prediction horizon,P , and sample t ime, T , on DMC performance.
The t rend in the Figure 3 graphs h f e f b showstha t by r educing prediction h orizon while mainta ininga constan t sample time ( T / p ) 0.1), the outpu t responsebecomes increasingly under damped. Also, the tr end ingraphs f f e f d il lustrates that by decreasing thesample time for a constant prediction horizon ( P ) 9),the output response becomes increasingly un derdamped.Thus, Figure 3 shows that the choice of P and T a reinterrelated.
Graphs f , h , and i i n F igure 3 show tha t a l a rge
prediction horizon ( P ) 16 with T / p ) 0.1) or a largesample time ( T / p ) 0.15 with P ) 9) does not improveclosed-loop perform an ce significant ly. However, it ha sbeen shown by past researchers (Garc a and Morari ,1982; Clarke a nd Scattolini, 1991; Rawlings and Muske,1993; Scokaert and Clarke, 1994) that a larger predic-tion horizon improves nominal stability of the closedloop. For th is reason, the prediction h orizon sh ould beselected such th at it includes t he st eady sta te effect of all past compu ted man ipulated input moves. Therefore,the prediction horizon cannot be used as the primaryDMC tuning parameter.
Figure 4 illustra tes the effect of control horizon, M ,for fixed P ) 54 , T / p ) 0.15, and ) 0.14. Graphs a - cshow that increasing the control horizon from 2 to 6 doesnot alter the performa nce significant ly. Actually, theonly noticeable effect is a slight increase in overshootfor a larger contr ol horizon. This is due to the additionaldegree of freedom from a larger control horizon. Thisallows m ore aggressive init ial moves t hat are latercompensa ted for by the extra moves a vailable.
Rawlings and Muske (1993) have shown tha t anecessary condition to ensure nominal stabili ty of infinite horizon MPC is that the control horizon shouldbe greater than or equal to the number of unstablemodes of th e system. Nevert heless, it is clear from thisstudy that control horizon, due to its negligible effecton closed-loop performance, is not well suited as theprimary DMC tuning parameter.
A conclusion from the above discussion is that thechoice of prediction horizon, P , cannot be made inde-pendent of the sa mple time, T . For stability reasons, Pmust be selected such that it includes the steady stateeffect of all past manipulated input moves; i.e., it shouldequal the open-loop sett l ing t ime of th e process insamples. Stability considerat ions a lso restrict t he choiceof control horizon, M . Besides, th e contr ol horizon doesnot h ave a significan t imp act on closed-loop perform an cein th e presence of move suppr ession. Therefore, thisbrief study supports the opinions of other researchers
Figure 2 . Importan ce of the move suppression coefficient, , intuning DMC with the cont rol hor izon, M , g r e a t er t han onemanipulated input move ( T ) 16, T / p ) 0.1, P ) 54).
Figure 3 . Effect of predict ion horizon, P , and sample t ime, T , onDMC performa nce for process 1 ( M ) 4, ) 0.14).
73 2 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
5/18
that the one candidate best suited as the final DMCtuning parameter is the move suppression coefficient, .
Analy t ica l Framework
In t his section, th e form of th e DMC tra nsfer functionis derived from th e DMC contr ol law. The difficulty inusing t his form for development of a n overall DMCtuning strategy is highlighted. I t is then shown howsome useful information relevant to the selection of move su ppres sion coefficient, , can be extracted fromthe form of the DMC transfer function.
DMC Cont ro l Law. The cornerstone of the DMCalgorithm is a discrete convolution or step responsemodel of the process that predicts the output ( y(n + j)) j sampling instants ahead of the current t ime instant ,n :
In eq 3 , y0 is th e init ial condition of the measuredoutput, u i ) u i - u i- 1 is the chan ge in th e manipulatedinput at the i th sampling instant, a i is the i th un it step
response coefficient of the process, and N is the processsettling time in samples.
The current and future manipulated input moves areyet undetermined and are not used in the computationof th e predicted out put profile. Ther efore, eq 3 redu cesto
where the t e rm d (n + j) lumps together possibleunmeasured disturbances and inaccuracies due to plant-model mismatch. From eq 4, the predicted output atthe current instant ( j ) 0) is
Since the future values of d (n + j) are n ot available,an estimate is used. In the absence of any additionalknowledge of d (n + j) over futu re sa mpling instan ts, thepredicted disturbance is assumed to be equal to thatestimated at the current t ime instant. Therefore
where y(n ) is the measurement of the current output.A more accurate estimate of the d (n + j) is possible,
provided the load distur bance is measured a nd a reliableload disturbance to measured output model is available.Using the unit step response coefficients from thismodel, an equat ion similar t o eq 5 above can be u sed topredict t he futu re distu rban ce (Asbjornsen , 1984; Muskeand Rawlings, 1993). A DMC configurat ion t ha t u sesa pr ocess model au gmented with a disturba nce to outpu tmodel is known as feed-forward DMC.
Now, if the predicted output is to follow the set pointin the wake of a s et poin t change or unmeasureddisturban ce, then the current and future m anipulatedinput moves in eq 3 have to be determined such that
Substituting eq 3 in eq 7 gives
The term s on the left in eq 8 represent the err or betweenthe predicted output and the set point that will existover the next P sampling instants provided no furthermanipulated input moves are made by the controller.The term on the right represents the effect of the yetundetermined current and future manipula ted inputmoves.
Equa tion 8 is a system of linear equat ions which canbe represented as a matrix equation of the form
Figure 4 . Effect of the control horizon, M , on DMC performancefor process 1 ( T ) 16, T / p ) 0.1, P ) 54, ) 0.14).
y(n + j) ) y0 + i) 1 j
a i u (n + j - i) +
} effect of curr ent andfuture moves
i) j+ 1
N - 1
a i u (n + j - i) (3) } effect of past moves
y(n + j) ) y0 + i) j+ 1
N - 1
(a i u (n + j - i)) + d (n + j) (4)
y(n ) ) y0 + i) 1
N - 1
(a i u (n - i)) + d (n ) (5)
d (n + j) ) d (n ) ) y(n ) - y0 - i) 1
N - 1(a i u (n - i)) (6 )
ysp (n + j) - y(n + j) ) 0 j ) 1, 2, ..., P (7)
ysp (n + j) - y0 - i) j+ 1
N - 1
a i u (n + j - i) - d (n ) ) } predicted error based on past moves, e(n + j)
i) 1
j
a i u (n + j - i) j ) 1, 2, ..., P (8)
} effect of current a nd futur emoves to be determined
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 73 3
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
6/18
or in a compact matrix notation as
where ej is th e vector of predicted errors over th e n extP sampling instants, A is the dynamic matrix, and ujis the vector of manipulated input moves to be deter-mined.
An exact solution to eq 10 is not possible since thenumber of equations exceeds the degrees of freedom ( P> M ). Hen ce, th e contr ol objective is altern at ively posedas a least-squares optimization problem with a qua-dra tic per form an ce objective (cost fun ction) of th e form
In the unconstrained case, this minimization problemhas a closed-form solution which represents the DMCcontrol law
Implementation of DMC with the control law in eq12 results in excessive control action, especially whenthe control horizon is greater t han 1. Hence, a qua -dratic penalty on the size of manipulated input movesis int roduced into the DMC performan ce objective. Themodified performance objective has the form
where is the move suppr ession coefficient. For th emodified performance objective the closed form solutiontakes the form (Marchet t i e t a l ., 1983; Ogunnaike,1986):
DMC Transfer Fun ct ion . The DMC tra nsfer func-tion is developed by building upon prior work by Gupta(1987, 1993). Let ci denote t he ith first row element of the pseudoinverse matrix, ( A T A + I )- 1 A T. Then, u (n ),
the first element of uj in eq 14 t o be implemented atthe current instant, can be writ ten as
The expression for the predicted error from eq 8 can bemodified to eliminate y0 using eq 5:
Substituting eq 16 in eq 15 gives
Let ysp (n ) be a weighted average of the desired setpoint profile over P futur e sampling instants:
Using eq 18 in eq 17, the latter becomes
Replacing ysp (n ) - y(n ) ) e(n ), the error at the currentsample t ime, eq 19 becomes
Transformation of eq 20 to the z-doma in gives the DMCtra nsfer function form:
Although eq 21 provides insight into the form of theDMC transfer function, theoretical analysis of t heclosed-loop system is very complicated (even after theassumption of a FOPDT model approximation of the
[e(n + 1)e(n + 2)e(n + 3)
e(n + M )
e(n + P )]
P 1
)
[a 1 0 0 0a 2 a 1 0 0a 3 a 2 a 1
0
0a M a M - 1 a M - 2 a 1
a P a P - 1 a P - 2 ... a P - M + 1]P M
[ u (n ) u (n + 1) u (n + 2)
u (n + M - 1)] M 1 (9)ej ) A uj (10)
Min uj J ) [ej - A uj ]T[ej - A uj ] (11)
uj ) ( A T A )- 1 A Tej (12)
Min uj
J ) [ej - A uj ]T[ej - A uj ] + [ uj ]T [ uj ] (1 3)
uj ) ( A T A + I )- 1 A Tej (14)
u (n ) ) i) 1
P
cie(n + i) (15)
e(n+
j))
ysp (n+
j)-
y0-
i) j+ 1 N - 1
a i
u (n+
j-
i)-
d (n )
) ysp (n + j) - y(n ) - j) 1
N - 1
(a i+ j - a j) u (n - j)
(16)
u (n ) ) i) 1
P
ci{ ysp (n + i) - y(n ) -
j) 1
N - 1
(a i+ j - a j) u (n - j)} (17)
ysp (n ) )i) 1
P
ci ysp (n + i)
i) 1
P
ci
(18)
u (n ) )
i) 1P
ci{ y
sp(n ) - y(n )} -
i) 1
P
ci{ j) 1
N - 1
(a i+ j - a j) u (n - j)} (19)
u (n ) + i) 1
P
ci{ j) 1
N - 1
(a i+ j - a j) u (n - j)} ) i) 1
P
cie(n ) (20)
D( z) ) u ( z)e( z)
) 1
(1 - z- 1)(1i) 1
P
ci
+ j) 1
N - 1(i) 1P
cia i+ j
i) 1
P
ci
- a j) z- j)(21)
73 4 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
7/18
process). This is primarily because i t is difficult torepresent the elements, ci, of the pseudoinverse ma trixana lytically in terms of the step response coefficients.
Consequently, eq 21 does not serve as a convenientstarting point for devising the analytical expression forcomputing . However, as shown in t he n ext section,some useful informat ion r egarding t he form of th e movesuppression coefficient rule can be extra cted from theDMC tra nsfer function.
G ai n S c a li n g o f t h e Mo v e S u p p re s s i on Co e f-f ic ien t . Previous work has proposed that the choice of the move suppression coefficient can be made indepen-dent of the process gain (Lalonde and Cooper, 1989;McIntosh et al., 1991). Gain-scaling is a term coinedto represent a transformation where a mathematicalexpression is stripped of the effects of process gain foran alysis independent of gain. For example, gain-scalingof the move suppression coefficient can be done byexpressing it as a product of a scaled move suppressioncoefficient, f , and the square of the process gain, K p
2.Note that this a pproach is restricted to DMC appliedto SISO systems and cannot be directly extended tomultivariable systems.
Consider a form of the move suppression coefficientgiven by
The st ep r esponse coefficient of any linear system canbe writ ten a s
where a i represents the pa rt of the un it step responsecoefficient tha t is independent of the process gain, K p.Using eq 22 and eq 23, it is possible to separ ate the ga in-related effects from the first row elements, ci, of thepseudoinverse matrix:
Here, A is the gain-scaled dynamic matrix, A T A is thegain-scaled system matrix, and ci i s the ith first rowelement of the gain-scaled pseu do-inverse ma trix.
Substituting eq 23 and eq 24 in eq 21 shows that thegain dependen ce of the SISO DMC tra nsfer function isseparable from the dependence on remaining processand controller parameters:
Similarly, the gain dependence of a l inear processt ransfer funct ion is separable from the remainingprocess parameters:
Using eq 25 a nd eq 26, the open-loop t ran sfer functionis of the form
and the closed-loop transfer function is of the form
By casting t he move suppression, , a s a s ca ledcoefficient, f , times the square of the process gain, K p
2,th e SISO DMC r esponse looks sim ilar for all first -ordersystems when the time dimension is scaled appropri-at ely. In other words, eq 28 shows th at , by gain-scaling as in eq 22, the closed-loop performa nce is ren deredindependen t of th e process gain. As a resu lt, derivat ionof an analytical expression for yields a scaled coef-
ficient, f , that is a function of parameters other thanthe process gain.
Der iva t ion of an Analy t ica l Express ion for
The analysis of the gain-scaled system matrix, A T A ,involves the developmen t of an a pproximat e form of th egain-scaled system matr ix. Such an a pproximat ion ismade poss ible wi th the use of a FOPDT model ap-proximation of the process. It mu st be emphasized thatthe use of this FOPDT approximation is employed onlyin th e derivat ion of the a na lytical expression for . Theexamples p resen ted la t e r in th is work a ll u se thetraditional DMC step response matrix of the actualprocess up on implementat ion.
An Ap p r o x im a t e F o r m o f t h e A T A Matrix. AFOPDT model with zero-order hold is represented by adiscrete transfer function as
where K p is the process gain, p is th e overall processtime constant , T is the discrete sam ple t ime, and k isthe effective discrete dead time given by
In eq 30, p is the effective dead time in the process.From eq 29, the step response coefficients of a FOPDTprocess a re given by
Using a FOPDT m odel appr oximation of the pr ocessand the gain-scaled step response coefficients from eq31, the dynamic matrix from eq 9 h as t he form
) fK p2 (22)
a i ) K p a i (23)
ci ) ith first row element of {( AT A + I )
- 1 A
T}
) ith first row element of {(K p2 A T A + fK p
2I )- 1K p A
T}
) 1/ K p i th first r ow element of {( AT A + f I )- 1 A T}
) ci / K p (24)
D( z) ) u ( z)/ e( z) )1
K p(1 - z- 1)(1
i) 1
P
ci
+ j) 1
N - 1(i) 1P
ci a i+ j
i) 1
P
ci
- a j) z- j)) D ( z)/ K p
(25)
G ( z) ) y( z)/ u ( z) ) K pG ( z) (26)
D( z)G ( z) ) y( z)/ e( z) ) ( D( z)/ K p)K pG ( z) ) D ( z)G ( z)(27)
y( z) ysp ( z)
) D ( z)G ( z)1 + D ( z)G ( z)
) D ( z)G ( z)1 + D ( z)G ( z)
(28)
H 0G p( z) )K p(1 - e
- (T / p)) z- k
(1 - e - (T / p) z- 1)(29)
k ) p / T + 1 (30)
a i ) {0 0 e j e k - 1(1 - e - (T / p)( j- k + 1)) k e j (31)
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 73 5
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
8/18
For t his form of the dynamic matrix, the gain-scaledsystem matr ix, A T A , in the DMC control law has theform
An approximate form of the gain-scaled system matrixcan be obtained by approximating individual terms of the matrix in eq 33 for large values of the predictionhorizon, P , and sma ll sample times, T (small T / p). LetRij (i , j ) 1, 2, ..., M ) be the term in the ith row and jthcolumn of th e gain-scaled sys tem matr ix. The ap-proximation of one such term, R11 , is shown in eq 34.
Recognizing that the summation terms in R11 are ingeometric progression results in the exact expression
With a FOPDT m odel approximation available, th eprediction horizon, P , can be computed as t he open-loopprocess settling time in samples as P ) (5 p / T ) + k . Thissupports the findings of past researchers (Garc a andMorshedi, 1986; Maur ath et al., 1988a; Lundstr om etal., 1995) tha t P should be large enough to include thesteady state effect of all past input moves.
For large values of prediction horizon, the term in eq34 simplifies to
Notice th at the approximation in eq 35 becomes increas-ingly accura te a s P increases and is exactly true for a ninfinite horizon implemen ta tion of DMC. A first -orderTaylor series expansion, e - (T / p) ) 1 - T / p, tha t is validfor small sample times ( T / p e 0.1), can be applied toeq 35 to yield
The validity of the approximation in eq 36 is exploredlater in this section.
The o ther t e rms of the A T A mat r ix can be ap -
proximated using a similar procedure. The final a p-proximate form of the matrix that results is
Let ) R11
= P - k - (3/2)( T / p) + 2, then
Note that the approximate A T A matr ix has a Hankelmatrix form with t he added featur e that the elementsof every row successively decrease by 0.5 from left toright. The approximat e mat rix of eq 38 is singular when
M g
3. This supports t he observation made by priorresearchers (Marchetti et al., 1983) that the A T A matrix(hence, th e A T A matrix) becomes increasingly singularfor la rge values of th e pr ediction horizon, P , and controlhorizon, M .
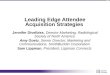
Figure 5 provides evidence that the a pproximat e gain-scaled system m atr ix is a good app roximat ion of the tru esystem matrix, especially for the analysis of the A T A + f I mat rix in t he DMC control law. Specifically, Figure5 shows the condition number for the exact and ap-proximate A T A + f I matrix as a function of the scaledmove su ppress ion coefficient, f , for different choices of the contr ol horizon. The pr ediction horizon employedin Figur e 5 is (5 p)/ T + k , which is the open-loop settlingt ime of the p rocess based on a FOPDT model ap -
F i g u r e 5 . Comparison of the true and approximate conditionnumbers of the A T A matrix for large values of the predictionhorizon, P .
A T A =
[P - k - 3
2T p
+ 2 P - k - 32
T p
+ 32
P - k - 32
T p
+ 1
P - k - 32
T p
+ 32
P - k - 32
T p
+ 1 P - k - 32
T p
+ 12
P - k - 32
T p
+ 1 P - k - 32
T p
+ 12
P - k - 32
T p
] M M
(37)
A T A ) [ - 12
- 1
- 12
- 1 - 32
- 1 - 32 - 2
] M M
(38)
e
e
e
e
e e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e e
e
e
ee
e
e
e
R11 ) i) 1
P - k + 1
(1 - e - i(T / p))2
) i) 1
P - k + 1
(1 - 2e - i(T / p) + e- 2i(T / p))
) (P - k + 1) -2e
- (T / p)(1 - e - (P - k + 1)(T / p))(1 - e - (T / p))
+
e- (2T / p)(1 - e - 2(P - k + 1)( T / p))
(1 - e - (2T / p))(34)
R11 = (P - k + 1) -2e
- (T / p)
(1 - e - (T / p))+ e
- (2T / p)
(1 - e - (2T / p))(35)
R11 = P - k - 32 T p+ 2 (36)
73 6 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
9/18
proximation of the process. This value of predictionhorizon is recommen ded in th e proposed tun ing stra tegybased on closed-loop sta bility considera tions (Garc a andMorar i, 1982; Clar ke a nd Scattolini, 1991; Rawlings an dMuske, 1993; Scoka ert an d Clar ke, 1994). From Figure5 i t can be seen that, for large values of predictionhor izon, the condit ion number of the approximatesystem matrix in eq 38 closely follows the true conditionnumber.
QR Fac tor iza t ion of the Approximate A T A + f IMatrix. Since the approximate form of th e systemmatrix (eq 38) was shown above to be a reasonableapproximation of the true system matrix (eq 33), th efollowing treatment of the A T A + f I mat rix is based onthis approximate form.
Consider t wo linear ly independent M -vectors:
The approximate A T A matrix (eq 38) can be written interms of these vectors as
where
Hence, hh1 and hh2 form a basis for the approximate A T Amatrix.
A Gram - Schmidt orthonormalization of h 1 and h 2yields th e orth onormal basis for A T A :
Therefore, hh1 and hh2 can be QR factored as
where R is upper tr iangular and invertible. Using eq43, eq 40 can be transformed to
where a and b are simple linear functions of . Equa-tion 44 can also be written as
Analytical expressions for a and b can be obta ined from
eq 45 by solving the system of equations that result fromthe top left parti t ioned block using eq 38 and eq 42.Thus, a and b are given by
Now, t he A T A + f I matrix, to be inverted in DMCcontrol law, has the form
Adopting the factored form in eq 45 and eq 46, eq 47 iswrit ten as
Equation 48 can now be u sed to determine explicitanalytical expressions for the eigenvalues of A T A + f I .From eq 47 it is clear that the approximate form of A T A+ f I has eigenvalues ) f with multiplicity ( M - 2).Therefore
The remaining two eigenvalues are found from thetop left partitioned block as the that satisfies
A solution t o eq 50 (usin g eq 46) yields th e lar ger of th etwo eigenvalues as
Alterna tively, the m inimum a nd m aximum eigenval-ues of A T A + f I can be determined by reasoning. Notetha t t he A T A mat rix (eq 38) is near ly singular for M )2 and is perfectly singular for M > 2. Therefore, theminimum absolute eigenvalue of A T A for M g 2 is closeto or exactly zero. When a constan t quan tity, f , is addedto the leading diagonal of such a matrix, all its eigen-values shift by th at quant ity (Hoerl and Kenna rd, 1970;Ogunnaike, 1986). Hence, the m inimum a bsolute eigen-value of the r esultan t A T A + f I matrix, min , is equal to f (eq 49).
hh1
T ) (1 1 1 1)1 M
hh2
T ) (0 1 2 M - 1)1 M (39)
A T A ) j hh1
T + hh1j T (40)
j ) 2
hh1
- 12
hh2 (41)
ej1
T ) 1 M
(1 1 1 1)1 M
ej 2T ) 12 M ( M - 1)( M + 1)(0 1 2 M - 1)1 M -( M - 1)2
(1 1 1 1)1 M (42)
[ hh1 hh2] M 2 ) [e 1 ej 2] M 2 R 2 2 (43)
A T A ) j hh1
T + hh1j T )
[ej1
ej2] M 2[
a b
b 0 ]2 2[ej
1ej
2]
2 M
T (44)
A T A ) [ej 1 ej 2 ... 0] M M
[a b
0b 0 0
0 ] M M [ej 1 ej 2 ... 0] M M T (45)
a ) M { - ( M - 1)2 }b ) -
M ( M - 1)( M + 1)2 12
(46)
A T A + f I )
[ + f - 12
- 1
- 12
- 1 + f - 32
- 1 - 32 - 2 + f
] M M
(47)
A T A + f I ) [ej 1 ej 2 ... 0] M M
[a+ f b
0b f 0
f I ] M M [ej 1 ej 2 ... 0 ] M M T (48)
mi n ) f (49)
|a + f - bb f - | ) 0 (50)
ma x )
M + 2 f -M ( M - 1)
2
+
M 2 2- M 2( M - 1) +
( M - 1) M 2(2 M - 1)
62(51)
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 73 7
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
10/18
Analytical expressions for the maximum eigenvaluecan be derived for the square matrix, A T A + f I , withsuccessively increasing dimensions ( M M ). By rec-ognizing tha t the various coefficients in t he ana lyticalexpressions follow a series pattern that is a function of the matrix dimension ( M M ), a general formula forthe m aximum eigenvalue can be obtained a s a functionof M . This general ana lytical expression is identical tothe analytical expression obtained in eq 51.
Formula t ion of the Analy t ica l Express ion for .
Past researchers (e.g., Ogunnaike, 1986) have indicatedthat the move suppression coefficient, , serves a dualpurpose in the DMC control law. Its primary role inDMC is to suppress otherwise aggressive controlleraction when M > 1. Additiona lly, serves to improvethe conditioning of the system matrix by rendering itmore positive definite.
One premise underlying this work is that both theseeffects are in ter re la ted . When is increased, themanipulated input move sizes decrease, as does thecondition number. Clearly, if the effect of on thecondition number of the system matrix can be analyti-cally expressed, th en this condition number can bemaintained within specified bounds by an appropriatechoice of . An u pper bound on t he condition n umberwould, in turn, prevent the manipulated input movesizes from becoming excessive.
The condition n umber is defined for a squar e ma trixas
where ma x and mi n r epresen t t he maximum andminimum eigenvalues of the m atr ix. From eqs 49, 51,and 52, the condition number for the A T A + f I matrixis
An int eresting appr oximate relation from eq 53 is tha tthe condition number of the DMC gain-scaled systemmatrix, c M (P - k )/ f .
Equation 53 is rearranged to give an expression forthe scaled move suppression coefficient as
where ) P - k - (3/2)( T / p) + 2 . Equa tion 54expresses the gain-scaled coefficient as a function of thecondition number of A T A + f I , th e contr ol horizon, a ndFOPDT model parameters other than the process gain.
Evaluation of f in eq 54 can be simplified by recogniz-ing the contr ibution of each ter m t o the value of f . T h elast ter m within t he squa re root in eq 54 can be modifiedto ease evaluation:
With this simplification, the expression for the gainscaled coefficient becomes
Past researchers (Maur ath et al., 1988a,b; Callaghanand Lee, 1988; Farrell and Polli, 1990) have indicatedtypical condition num bers for a moderately ill-condi-t ioned DMC system matrix. Condition numbers re-ported range from about 100 for single-input single-output systems to about 2000 for m ultivariable systems.Apar t from the var ie ty of sys tems considered, theapproximate relation, c M (P - k )/ f , indicates thatsome of the differences are due to th e different predic-tion and control horizons used by the individual design-ers. In th is work , a condition num ber of 500 is selectedto repr esent th e u pper allowable limit of ill-conditioningin t he system mat rix (corresponding t o modest contr oleffort).
The choice of the condition number, and hence theupper allowable limit of ill-conditioning in the systemmatrix, l ies with the individual designer. Dependingon the criterion for good closed-loop performance for agiven a pplication, t he condition num ber can be conve-nient ly fixed. The choice of a condition nu mber of 500was motivated by the rule of thumb that the manipu-lated inpu t m ove sizes for a chan ge in set point sh ouldnot exceed 2 - 3 times th e final change in manipulatedinput (Maura th et a l., 1985; Callagha n a nd Lee, 1988).However, if a faster or slower closed-loop response ismore desirable, a larger or smaller condition numberrespectively, can be used instead.
Substitut ing th e expression for in eq 56, with P )(5 p)/ T + k , t he ana lytical expression for the movesupp ression coefficient, , is given by
The an alytical expression for in eq 57, applied inconjunction with the recommended values for the othertuning parameters, gives the tuning strategy for DMCwith M > 1.
Note that eq 57, which computes the move suppres-
sion coefficient, does not cont ain a dead t ime term . Thereason is not intuitively obvious but is an interestingone. The elements, and the condition number, of the( A T A + I ) matrix depend on the number of non-zeroterms in the dynamic matrix, A . This is clearer fromeq 33, where the first term of the ( A T A + I ) matrix isa series summation performed over the P - k + 1 non-zero terms in t he dynam ic mat rix A . (Equa tion 37 alsoconveys the dependence of condition number of ( A T A + I ) on P - k , ra ther than P alone). Additiona lly, thechoice of prediction horizon as P ) (5 p / T ) + k causesthe elements of ( A T A + I ) to depend on P - k ) (5 p / T ). Hence, the condition n umber of ( A T A + I ) and th emove suppression from eq 57, are dependent on (5 p / T )and are independent of dead t ime. Of course, this is
2 - ( M - 1) +( M - 1)(2 M - 1)
6=
2 - ( M - 1) +( M - 1)2
4) ( - ( M - 1)2 )
2(55)
f ) M
c( - ( M - 1)
2) (56)
f ) M 500(72
pT
+ 2 -( M - 1)
2 ) ) fK p
2 (57)
c )| ma x || mi n |
(52)
c ) 12 f ( M + 2 f - M ( M - 1)2 +
M 2 - ( M - 1) + ( M - 1)(2 M - 1)6 ) (53)
f ) M 2c( - ( M - 1)2 +
2 - ( M - 1) + ( M - 1)(2 M - 1)6 ) (54)
73 8 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
11/18
tr ue only if th e prediction horizon is chosen a s P ) (5 p / T ) + k (settling time of the process).
Extens ion of Tuning S t ra tegy to Mul t ivar iab leS y s t e m s
The selection of tuning parameters for multiple-inputmultiple-output (MIMO) DMC is significant ly m orechallenging for the pra ctitioner. The ana lytical expres-sion th at compu tes t he m ove sup pression coefficient (eq57), developed in the previous section for SISO DMC,provides the foundation upon which a similar analyticalexpression can be developed for MIMO DMC. This ispossible in a straightforward fashion even though theperformance objective for MIMO DMC is defined overseveral manipulated inputs and measured outputs andresults in a more complex MIMO DMC control law.
For a sys tem with S manipula ted inputs and Rmeasured outputs, the MIMO DMC performance objec-tive (cost function) ha s th e form (Gar ca and Morshedi,1986)
In eq 58, ej is the vector of predicted errors for the Rmeasured outputs over the next P sampling instants, A is the multivariable dynamic matrix, an d uj is thevector of M moves to be determined for each of the Smanipulated inputs. T is a squar e diagonal ma trixof move sup pression coefficient s with dimen sions ( M S M S ). Similarly, T is a square diagonal mat rix thatcontains the controlled variable weights (equal concernfactors) with dimensions ( P R P R ).
A closed-form solution to the MIMO DMC perfor-mance objective (eq 58) results in the MIMO DMCcontrol law (Garca and Morshedi, 1986):
The MIMO DMC control law (eq 59) is similar to theSISO DMC control law (eq 14), except for the form of the move suppression coefficients, T , and the intro-duction of controlled variable weights, T .
The move suppression coefficients in multivariableDMC follow a notation slightly different from SISODMC. is a square diagonal matrix with dimensions( M S M S ). This matr ix can be divided into S 2 squareblocks, each with dimensions ( M M ). The leadingdiagonal elements of the first ( M M ) matrix block along the diagonal of are 1, the leading diagonalelements of the next ( M M ) matrix block along thediagonal of a re 2, and so on. Al l off-diagonalelements of the matrix are zero. Hence, the matrix
of move su ppress ion coefficients, T
, has the form
Thus, in the MIMO DMC control law (eq 59), the movesuppression coefficients that are added to the leadingdiagonal of the multivariable system m atr ix, ( A T T A ),are i
2 (i ) 1, 2, . .. , S ). S imilar ly, th e matr ix of
controlled variable weights, T , has the form
Hence, the contr olled variable weights are i2 (i ) 1, 2,
..., R ).Similar t o SISO DMC, adjusta ble paramet ers tha t can
be us ed t o alter closed-loop performan ce for MIMO DMCinclude the prediction horizon, P , th e contr ol h orizon, M , the model horizon, N , the sample t ime, T , and themove suppression coefficients, i
2. In addition, MIMODMC ha s yet a nother set of adjustable param eters inthe form of th e controlled variable weights, i
2.J ust a s with th e SISO case, practical limitat ions often
restrict th e a vailability of sample time, T , as a tuningparameter for MIMO DMC (Franklin and Powell, 1980;Astr om a nd Witten ma rk, 1984). The model horizon, N ,i s a lso not an appropr ia te tuning parameter s incetruncation of the model horizon can lead to unpredict-able closed-loop perform an ce (Lun dst rom e t a l., 1995).As demonstrat ed earlier for SISO DMC, the controlhorizon, M , does not h ave a significan t effect on closed-loop performance, especially in the presence of movesuppression.
The contr olled var iable weights, i2, s e r v e a d u a l
purpose in MIMO DMC. These weights can be ap-propriately chosen by the user to scale measurementsof the R measu red outpu ts to comparable units. Also,it is possible to achieve tighter control of a particularmeasu red outpu t by selectively increasing the r elativeweight of the corresponding least-squar e residual. Hence,controlled variable weights are usually specified by the
user for a certain application and cannot be employedas t he primary tuning par ameters for MIMO DMC.Analogous to SISO DMC, the move suppression
coefficients can be conveniently used to fine tune MIMODMC for desired closed-loop performa nce. Since th edual benefit of the move suppression coefficients, i
2, isagain to improve the conditioning of the MIMO DMCsystem matrix ( A T T A ) and move size suppression forthe S inputs, a strategy an alogous to SISO DMC canbe used to extend eq 57 to compute the move suppres-sion coefficients for MIMO DMC.
Building upon the analogy, an approximation of theMIMO DMC system m atr ix, ( A T T A ), ha s th e form of a mosaic Han kel mat rix (not shown h ere) comprised of S 2 Han kel mat rix blocks. The S 2 Hankel matrix blocks,each with dimensions ( M M ), have a form identicalto tha t obta ined ear lier (eq 47) from a s imi lar ap-proximation of the scaled SISO DMC system matrix, A T A .
The impact of a chan ge in the i th ma nipulated inputon all measured outputs is reflected in t he i th diagonalHan kel mat rix block. Hence, it is possible to select t heith move suppression coefficient, i
2, s u ch t h a t t h econdition number of the ith diagonal matrix block isalways bounded by a fixed low value. By holding thecondition nu mber of the ith diagonal matrix block at alow value, desirable closed-loop performance is achievedwhile preventing the i th manipulated input move sizefrom becoming excessive.
Min uj
J ) [ej - A uj ]T T [ej - A uj ] + [ uj ]T T [ uj ](58)
uj ) ( A T T A + T )- 1 A T T ej (59)
T ) [ 1
2I M M
0
0
0
22I M M
0
0
0
] M S M S
(60)
T ) [ 1
2I P P
0
0
0
22I P P
0
0
0
]
P R P R
(61)
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 73 9
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
12/18
With this understanding, an analytical expressiontha t comput es the move suppr ession coefficients forMIMO DMC can be obtained as
Using eq 62, the S move suppression coefficients, one
for each input, can be computed for a given samplingtime, T , control horizon, M , and controlled variableweights, i.
In eq 63, it is not possible to substitute P ) (5 p)/ T +k as wa s done for t he SISO case since th e MIMO DMCarchitecture requires a single value of the predictionhorizon to be selected for all manipulated input andmeasured output pa irs. Nevertheless, the ana lyticalexpression for MIMO DMC is similar in form to thatobtained for SISO DMC (eq 57). In fact, for a single-input single-output process, the analytical expressionfor MIMO DMC (eq 62) reduces to the analyt ica lexpression for SISO DMC (eq 57) when P ) (5 p)/ T + k .
Implementa t ion of the DMC Tuning S t ra tegy
The proposed DMC tuning strategy, which includesthe analytical expression for the move suppressioncoefficient, , i s p resen ted in Table 1 . Th is tun ingstra tegy can be app lied to un const ra ined DMC in closedloop with a br oad class of SISO processes tha t a re open-loop sta ble, including those with challenging contr olcharacteristics such as high process order, large deadtime, and noniminimum phase behavior.
Step 1 (Table 1) involves the identification of a firstorder plus dead time (FOPDT) model approximation of the process. An accura te identification of the FOP DTmodel parameters is essential to the success of this
tuning strat egy. Since a model is only as good a s thedata it fits, it is necessary that the input - output dataused for model fitting be rich in dynamic informationof th e process. Typically, th is is achieved by pert ur bingthe p rocess to obtain a signal-to-noise ratio greater tha n10:1 (Seborg et al., 1986). Additiona lly, the da ta mustbe collected over a reasonable period of time to capturethe complete process dynamics. An FOPDT fit thusobtained often reasonably describes the process gain,K p, overall time constant, p, and effective dead time,p, of higher-order processes.
Step 2 involves th e selection of an appr opriate sam pletime, T . In most practical applications the user doesnot have th e freedom to choose sample time. The tun ingstrategy does require that T be known. In cases wherethe designer can select the sample time, certain rulesof thu mb tha t guide in its selection ar e available. Rulesthat select T for a desired closed-loop bandwidth, B,have been proposed in the pas t , e .g. , T e 2 /10B(Middleton, 1991). Since th e choice of T is related tothe overall time constant, p, and the effective dead t imeof t he process, p (Seborg et al., 1986), the estimatedFOPDT model param eters provide a convenient wa y toselect T . A good ru le of thum b is to select T such thatthe sampling rate is not less than 10 t imes per t imeconsta nt. Hence, for DMC, the recommen ded sampletime is
An additional criterion for sample time selection istha t th e sampling rate should be high enough to sampletwo or thr ee times p er effective dead time of the pr ocess,T e 0.5 p (Seborg et al., 1986). This criterion is not astringent requirement for DMC. However, if sampletime can be chosen, the pru dent a pproach is to pick th elargest T that satisfies both criteria mentioned above.Once T is fixed, the discrete dead time, k , is calculatedfrom t he effective dead time of the p rocess, p in step 3.
Step 4 computes a model horizon, N , and a prediction
horizon, P , from p, p, and T . Note that both N and Pcannot be selected independent of the sample time, T .For DMC, it is imperat ive th at N be equal to the open-loop process settling t ime in sa mples to a void tru ncationerr or in t he model prediction (Lund str om et al., 1995).For comput ing P , a rigorous treatment by past research-ers (Garc a and Morari , 1982; Clarke and Scattolini ,1991; Rawlings and Muske, 1993; Scokaert and Clarke,1994) has shown that a larger predict ion hor izonimproves nominal stabili ty of the closed loop. Forpractical applications this t ran slates to using a reason-ably large but finite P . Bearing in mind this importa ntrequirement for stability, P is also set equ al to th e open-loop process settling time in samples. With a F OPDTmodel approximation available, prediction horizon andmodel horizon can both be computed as P ) N ) (5 p / T ) + k .
In an indust r ia l se t t ing, there can be barr iers toselecting different P and T values for different SISODMC controllers. Also, the MIMO DMC architectur erequires tha t a single P and a single T be selected forall manipulated input an d measured output pairs. If the user has the freedom to select a sample time in sucha scenario, a conservative choice would be the smallestvalue of T that satisfies eq 63 for all individual ma-nipulated input and m easured output pa irs. Based onthis sample time (or the fixed sample time), a singleprediction horizon can be computed as P ) max {(5 p ij)/ T + k ij (i ) 1, 2, ..., S ; j ) 1, 2, ..., R )} for a system with Smanipulated inputs and R measured outputs.
Step 5 requires the specification of a control horizon, M , and the computation of an appropriate move sup-pression coefficient, . Recommended values of M rangefrom 1 th rough 6. However, selecting M > 1 providesadvance knowledge of the impending manipulated inputmoves by the controller and can be very useful to thepractitioner (Ogunna ike, 1986). Also, Rawlings a ndMuske (1993) have shown t ha t t he st ability of infinitehorizon MPC can be guara nteed if M is greater than orequal to the number of unstable modes in the process.
The strategy for computing depends on the choiceof M . As demonstrated earlier, with M ) 1 the needfor a move suppression is obviated and is set equal tozero. However, if M > 1, a scaled move suppressioncoefficient, f , i s fi rst computed from an analyt ica lexpression (eq 57). The product of the scaled movesuppression coefficient, f , and t he squa re of the pr ocessgain, K p
2, determines an appropriate value for .Step 6 summa rizes the DMC tuning parameters. For
certain applications, more specific or stringent perfor-mance criteria regarding the manipulated input movesizes or the nature of the measured output response mayapply. For such cases, it may be necessary to fine tun eDMC for desired performance by altering P and fromthe star t ing values given by the tuning strategy. Therecommen ded appr oach is t o increase for smaller movesizes and slower output response.
i2 )
M
500 j) 1
R [ j2K p ij2 (P - k ij - 32 p ij
T + 2 -
( M - 1)
2 )](i ) 1, 2, ..., S ) (62)
T e 0.1 p (63)
74 0 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
13/18
Valida t ion of the DMC Tuning S t ra tegy
All the simulation examples presented in this work use the tradit ional DMC step response matrix of theactual process upon implementation and a negligibleplant-model mismatch is assumed. In the past , severalresear chers ha ve investigated th e effects of plan t-modelmismatch on controller performance (Morari and Zafir-iou, 1989; Zafiriou, 1991; Ohshima et al., 1991; Gupta,1993; Lee and Yu, 1994; Lun dstr om et al ., 1995).Hence, this work focuses strictly on the capabilities of
the tuning strategy in providing desirable closed-loopperformance.Processes with a range of characterist ics that pose
specific challenges in process control are employed forthe purpose of tun ing stra tegy validation. Specifically,characteristics such as large dead time, minimum phasebehavior, inverse response, and high process order a ndtheir effects on the performance of the tuning strategyare investigated. The impact of user-specified sampletime, T , and control hor izon, M , is also explored.Disturbance rejection performance of DMC tuned usingthe tu ning strategy is evaluated. The proposed exten-sion of the tu ning st ra tegy (eq 62) is also validated withan example application to binary distillation columncontrol.
Tu n i n g S t r a t e g y Va l id a t i o n f o r C h a l le n g i n gP r o c e s s e s . For validat ion of the proposed tuningstrategy, three example higher-order processes withdifferent dynamic characterist ics are considered inaddition to process 1:
Process 1 (eq 2) i s a second-order process with arelatively large dead time, process 2 exhibits inverseresponse chara cterist ics, process 3 has a minimumphase behavior, and process 4 is a fourth-order processwith sluggish open-loop dynamics.
The results of the tuning strategy applied to DMC
with process 1 are not explicitly shown since they arealready demonstrated in Figures 2 - 4. For example,Figure 2c represents the results of the tu ning strategyapplied to process 1 (FOPDT fit: K p ) 1.0; p ) 157; p) 70). Here, the sample t ime, T , is selected such thatT / p ) 0.1 and the cont rol horizon M ) 4. The effective-ness of the tuning strategy in selecting appropriatevalues for the tuning parameters for processes with afairly large dead t ime is clear from th ese demonstra-tions.
Figures 6 - 8 are simulation r esults when th e tuningstrategy is applied to processes 2 - 4, respectively. Thesefigures i l lustrate the response of the respective pro-cesses to a step chan ge in set point. Specifically, eachfigure shows a matrix of four graphs, where each graph
represents the performance of DMC tuned using theru les in Ta ble 1, for a u ser-selected cont rol horizon of 2or 6 a nd sample t ime with a T / p of 0.05 or 0.15.
Figure 6 shows the tuning resul ts for process 2(FOPDT fit: K p ) 1.0; p ) 163; p ) 105). The benefitof a FOPDT model approximation as a basis for thetuning strategy is evident here as the init ial inverseresponse (due to the zero in the right half plane) of process 2 is approximated a s a n additional dead t imein the FOPDT model fi t . The addi t ional dead t imeresults in a larger P for th is inverse r esponse process(compared to the value of P recommended for theminimum ph ase process in Figure 7). Consequent ly, theDMC cont roller is able t o look beyond th e initial in verseresponse. Also, the initial inverse response prevents theoutput response from overshooting the final set point.Nevertheless, with the computed tuning parameters, adesirable closed-loop response results while also pre-venting the ma nipulated input move sizes per unit gainof the process from becoming excessive.
Figure 7 illustrates the tuning results for process 3(FOPDT fit: K p ) 1.0; p ) 148; p ) 18). Despite thesecond-order char acteristics of th is process, the F OPDTmodel appr oximat ion results in a short dead time. Thisis becau se th e process exhibits m inimum pha se behavior
(due to the zero in the left h alf plane). The graphs inFigure 7 show that the measured output exhibi ts amodest overshoot and has a faster r ise t ime than theprocess with the initial inverse response in Figure 6.However, the tuning parameters given by the tuningstrategy result in acceptable closed-loop performancewith manipulated input moves of a similar magnitude.
Figure 8 represents the results from the applicationof the tuning strategy to process 4 (FOPDT fit: K p )1.0; p ) 124; p ) 99). Due to the high order of theprocess, an d the associated initial sigmoidal response,the F OPDT model approximat ion pr ovides a larger dea dtime estimate. The graphs in Figure 8 show that t hehigh order of th e process results in a closed-loopresponse to a set point step that is more underdamped
process 2
G p(s ) )(1 - 50 s )e - 10 s
(100 s + 1) 2(64)
process 3
G p(s ) )(50 s + 1)e - 10 s
(100 s + 1) 2 (65)
process 4
G p(s ) )e
- 10 s
(50 s + 1)4(66)
Figure 6. Effectiveness of the DMC tuning strategy demonstratedfor process 2 for different choices of the control horizon, M , andsample t ime, T .
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 74 1
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
14/18
than low-order processes and exhibits a larger peak oversh oot. However, even for t his four th -order process,the tuning strategy successfully implements DMC toprovide desir able closed-loop per form an ce.
A general ru le of thu mb for th e man ipulated input isthat the move sizes should not exceed 2 - 3 t imes thesteady state change in tha t ma nipulated input (Maurathet al., 1985; Callaghan a nd Lee, 1988). In a ddition t opreventing t he early wear of final control elements,small manipulated moves also contribute to an increasein robustness of the contr oller. Figures 6 - 8 show thatthe proposed tuning strategy results in manipulated
input sizes that l ie within this recommended range.However, a stricter guideline imposed by the individualdesigner may be achieved by a ppropriately decreasingthe upper bound of the system matrix condition numberfrom the value of 500 used in this work.
E ff e c t o f S a m p l e Ti m e a n d C o n t ro l H o r i z o n .Figures 6 - 8, ea ch comprise a mat rix of closed-loopresponse r esults for d ifferent T and M . Resu lt s a represented for sample t imes such that the ratio T / p is0 .05 and 0 .15. M is s elect ed to be e ither 2 or 6man ipu la t ed inpu t moves. The r ange of T and Pexplored corresponds to that recommended by theproposed tuning strategy.
The impact of T on DMC closed-loop per form an cewhen P is held constan t was shown in Figure 3. Figures6- 8 show tha t t he t un ing stra tegy of Table 1 is effectivein accounting for different sampling rat es. For example,graphs a and c of Figure 6 show the effectiveness of thetuning stra tegy when T / p for p rocess 2 is increa sed from0.05 to 0.15. As T increases, P is appropriately reducedto ma intain similar closed-loop performa nce. Similarcomparisons between other pairs of graphs verticallystacked in Figures 6 - 8 lead to the same conclusion.
Another interesting observation can be made aboutthe effect of T on the analytical expression for . F orexample, graphs a and c of Figure 6 show that the computed from the analytical expression decreaseswhen T is increased. This is due t o a shorter P t ha tresults when T i s increased. For a fixed M , a s Pdecreases the system matrix becomes less singular (ill-conditioned) and the overall ma gnitude of its elementsdecreases. Hence, a smaller is sufficient to providethe same effect as a larger with a larger predictionhorizon.
The effect of increasing M f rom 2 to 6 i s r a the rinsignificant for a second order plus dead time process(process 1), as shown ear lier in Figure 4. However, forother higher-order processes considered in this study,an increase in control horizon causes the manipulated
input moves to be more aggressive and the output toexhibit a greater peak overshoot. Figures 6 - 8 showth at th e cont rol effort , an d t he closed-loop per form an ce,can be reverted back to the original value by an increasein . For example, graph s a an d b of Figure 6 show that comput ed from the ana lytical expression increases asthe contr ol horizon is increased from 2 to 6. Compar i-sons between other pairs of graphs placed side by sidein Figures 6 - 8 lead to the same conclusion. From th esedemonstrations it is apparent that the proposed tuningstra tegy shows promise indeed for the initial tun ing of unconstrained SISO DMC.
E ff e ct i ve n e s s o f Tu n i n g S t ra t e g y f or D i st u r-bance Rejec t ion . In addition to set point tracking, acontr oller should be capable of rejecting unexpecteddisturban ces tha t cause th e process to deviate from th edesired operat ing conditions. Other researchers (e.g.,Farre ll and Pol li (1990)) have established that anadvantage of DMC over PID-type classical controllersfor disturba nce rejection is th at it pr ovides superiorperformance when disturbance tuning differs signifi-cantly from servo tun ing. Hence, the stu dy presentedhere investigates only the effect of move suppressionon DMC performance for disturban ce rejection an d th eeffectiveness of the tuning strategy for selection of theappropriate move suppression coefficient.
I t is important to emphasize that the form of DMCconsidered in this work allows the introduction of feed-forward control in a natural way to compensate for
Figure 7. Effectiveness of the DMC tuning strategy demonstratedfor process 3 for different choices of the control horizon, M , andsample t ime, T .
Figure 8. Effectiveness of the DMC tuning strategy demonstratedfor process 4 for different choices of the control horizon, M , andsample t ime, T .
74 2 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
15/18
measurable disturbances. Several r esearchers (Asb- jornsen, 1984; Yocum and Zimmerman, 1988; Taka-mat su et al., 1988; Glova et a l., 1989; Hokan son et al.,1989; Muske and Rawlings, 1993; Prada et al., 1993;
Soroush and Kravaris, 1994) have studied the perfor-mance of feed-forward DMC and demonstrated that itenha nces th e distur bance rejection capability of DMC,provided an accur at e model of the distur ban ce to outputmodel is available. However, the a ddition of a feed-forward feature in DMC does not affect the selection of tuning parameters, and the tuning strategy presentedin this paper applies directly to a feed-forward config-u ra t ion of DMC. For the same reason , t h is pape rdemonstrates the effectivness of the proposed tuningstrategy only for DMC without feedforward.
Graphs a - c of Figure 9 demonstrate the effect of themove su ppr ession coefficient, , on distu rban ce rejectionfor DMC without feed-forward and process 1 (eq 2). Thedisturban ce to outpu t dyna mics considered also have atra nsfer fun ction given by eq 2. In th is stu dy, all tuningparameters other than the move suppression coefficientare fixed at values computed using the DMC tuningstrategy in Table 1.
Figure 9a shows t hat disturbance rejection is mosteffective when the move suppression is eliminated ( )0). Interestingly, with no move suppression, th e ma -nipulated input sizes ar e not excessive for distu rban cerejection. However, ) 0 is not an appropriate choiceof the move suppression as i t results in undesirableaggressive manipulated input moves for set point track-ing. This was demonstrated earlier in Figure 2b.
Disturbance rejection performance for the move sup-pression coefficient comput ed using the an alytical ex-
pression in eq 58 is illustra ted in Figure 9b. In add itionto effective disturbance rejection, the computed movesuppression coefficient results in m odest man ipulatedinput move sizes. When t he move suppression coef-ficient is increased to ) 4.0, disturbance rejectionperforma nce worsens, as shown in Figure 9c. Such alarge move suppression coefficient was also shownearlier in Figure 2d t o be undesirable since it results ina relatively slower response for set point tracking.Hence, th is s tudy shows t hat the proposed tuningstrategy results in tuning parameters that effectivelyreject unmeasured disturbances.
An Example Mult ivariable Applicat ion. The tun-ing strategy, presented and validated in this paper forSISO DMC, was extended to MIMO DMC as thean alytical expression in eq 62. An exam ple applicat ionof the tuning s t ra tegy extended to MIMO DMC isdemonstrated here for a 2 2 distillation column model(Wood and Berr y, 1973). This meth an ol - water columnmodel h as been used for several controller studies,including th e a pplicat ion of model pr edictive cont rollers(Marchetti, 1982; Mau rat h, 1985, Lee and Yu, 1994) andcan be writ ten a s
Here, X D represents the mole fraction of methanol inthe distillate, X B the mole fraction of methanol in thebottoms, R F the reflux flow, and Q V the vapor boil-uprate. All the t imes are given in minutes.
A sample t ime, T , of 3 min was used in this study.The prediction horizon, P , an d m odel horizon, N , werecomputed to include the steady state terms in the stepresponse of a l l manipula ted var iable and measuredoutput pairs as P ) N ) max{(5 p ij)/ T + k ij (i ) 1, 2, ...,S ; j ) 1, 2, ..., R )}. Equa l controlled variable weightswere used for both measured outputs, i.e., T ) I . Themove suppression coefficients, T , were computed fromthe ana lytical expression for MIMO DMC in eq 62 fortwo differen t choices of the cont rol horizon, M ) 2 and M ) 6. For the contr ol horizon, M ) 2, eq 62 computesthe diagonal elements of the matrix as 1 ) 4.9 an d 2 ) 9.1. For M ) 6, the diagonal elements computeda re 1 ) 8.3 and 2 ) 15.2.
Figure 10 i l lustrates the response of the two mea-sured outputs and the corresponding man ipulated inputmoves for a step cha nge in th e X D set point. The resultsin Figure 10 show that , for a user-specified controlhorizon of M ) 2 or M ) 6, the analytical expressionfor MIMO DMC compu tes move sup press ion coefficient stha t r esult in desirable closed-loop performance. In
either case, the output response tracks the set pointrapidly without exhibit ing overshoot and the corre-sponding manipulated input moves are modest in size.
Despite the interactions inherent in t he moderatelyill-conditioned Wood a nd Berry column, the effect of interactions on the m easured output , X B, are dampenedeffectively. This demonstr ation confirms t ha t th e tun -ing strategy presented for SISO DMC holds potentialfor a formal extension to the more challenging problemof tuning MIMO DMC.
Conclus ions
A tuning strategy for DMC, with a novel analyticalexpression for the move suppression coefficient, , was
F i g u r e 9 . Effectiveness of the DMC tuning strat egy in distur-bance rejection dem onstrat ed for pr ocess 1 ( T ) 16, T / p ) 0.1, P) 54, M ) 4).
[ X D(s) X B(s )]) [12.8e
- s
(16.7 s + 1)
- 18.9e - 3s
(21.0 s + 1)6.6e
- 7s
(10.9 s + 1)- 19.4e - 3s
(14.4 s + 1)][ RF(s)Q V(s )] (67)
Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997 74 3
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
16/18
presented. The application of this tun ing strategy wasdemonstrat ed thr ough simulations on a r ange of SISO,un const ra ined, open-loop st able pr ocesses. Specifically,the effect of process order and process characteristicssuch as large dead t ime, inverse response, and mini-mum pha se behavior were investigated. Also, the effectof contr ol horizon, M , and sample t ime, T , on selectionof was studied. The DMC controller t uned in thisfashion exhibited good set point tracking capability withacceptable peak overshoot and modest control effort.Disturban ce rejection performa nce of DMC t uned withthe proposed tun ing strategy was also explored. TheDMC controller tuned using th e proposed stra tegyeffectively and smoothly rejected unexpected distur-bances that impacted the process.
The elegance of the tu ning strat egy stems from th euse of a simplistic FOPDT m odel appr oximation of theprocess. A FOPDT approximation ma de the mat hemat i-cal treatment of the DMC control law more tractable.Also, such a model was shown to preserve cer ta incharacterist ics of th e process dynamics that helpedcompensate for the high order and inverse responsebehavior of processes. Specifically, in these cases, anincrease in estimated dead time and time constant ledto the recommendation of a larger prediction horizon.However, plant -model mismatch was avoided by usingthe t raditional DMC step response ma trix of the actua lprocess upon implementat ion.
To allow tuning of SISO DMC independent of the
process gain, existence of a scaled move suppressioncoefficient, f , observed by past researchers, was formal-ized. Subsequent ly, the sys temat ic form of the ap-proximate scaled system matrix obtained led to a betterunders tanding of the effects of DMC and processparameters on the selection of the move suppressioncoefficient. Consequent ly, an ana lytical form for themove suppression coefficient was formulated. Thisana lytical form directly addressed the issue of i l l-conditioning of the system matrix and the resultantmove sizes.
The form of the analytical expression for the conditionnu mber (eq 55) provided valua ble insight int o the extentof the impact t ha t each of the DMC and p rocessparameters have on the overall conditioning of the
system matrix. An importa nt observation was tha t, asan approximate relationship, the condition number of the DMC system matr ix is c M (P - k )/ f .
Tun ing of MIMO DMC and the r emova l of il l-conditioning in such systems was addressed only inlimited detail in th is work. However, a ma them aticalfram ework u pon which a formal tun ing strat egy can bebuilt for MIMO DMC was presen ted. Towar d obtain inga tuning strategy for MIMO DMC, the similarit iesbetween SISO and MIMO DMC were established.Building u pon th is similarity, a n an alytical expressiontha t comput es the move suppr ession coefficients forMIMO DMC was pr oposed. The effectiveness of thisimporta nt extension was demonstrat ed by tuning MIMODMC for control of a Wood and Berry disti llationcolumn.
Though n ot demonstrated here, the tu ning strategypresented is also directly a pplicable t o pa rametericcontr ollers like GP C, which employ a n au toregressivemoving a verage-based process m odel. Application toGPC should be fairly stra ightforward because th e fina lcontrol law and the tuning parameters of DMC and GPCare similar. For implementing the tuning strategy withGPC, the weighting polynomial that modifies the pre-dicted output profile must additionally be set at unity.
Hence, for those working with DMC or GPC this paperprovides some useful insight into controller tuning andselection of .
Important stability issues have been addressed onlyindirectly. Based on rigorous sta bility studies by other s,a large prediction horizon, P , and a control horizon, M ,greater than 1 are recommended to ensure nominalclosed-loop stabili ty. Robustness of the final MPCdesign has also not been investigated in this work.Robust ness becomes a critical design issue with great eruncerta inty in the intern al model of the contr oller. Byspecifying a bound on the condition number of th esystem matrix, A T A , some degree of robustness i sassured by preventing errors in the formulation of thedynamic matr ix to be pronounced in the computedmanipulated input moves.
N o m e n c l a t u r e
a ) constanta i ) i th unit step response coefficienta i ) i th gain-scaled unit step response coefficient A ) dynamic matrix A ) gain-scaled dynamic m atr ix A T A ) DMC system matrix A T A ) gain-scaled system matr ixb ) constantc ) condition numberci ) i th term of the pseudoinverse matrixci ) i th term of the gain-scaled pseudoinverse ma trixd ) lumped disturbance D( z) ) discrete controller transfer function D( z) ) gain-scaled discrete controller transfer functione ) predicted errorej ) vector of predicted errorsej j ) jth orthonorma l basis vector for the approximate A T A
matrix f ) gain-scaled m ove sup pression coefficientG p(s) ) continuous process transfer functionG p( z) ) discrete process transfer functionG p( z) ) gain-scaled discrete process transfer functionh j ) jth unit impulse response h j ) jth basis vector for the approximat e A T A matrix H 0 ) zero-order holdi ) index
F i g u r e 1 0 . Effectiveness of the MIMO DMC tuning strategydemonstrated for the Wood and Berry column for different choicesof the contr ol horizon, M , and sample t ime, T .
74 4 Ind. Eng. Chem. Res., Vol. 36, No. 3, 1997
8/8/2019 A Tuning Strategy for Unconstrained SISO Model Predictive Control
17/18
I ) identity matrix j ) index of sampling instant sk ) discrete dead timeK p ) process gain M ) control horizon (number of man ipulated inpu t m oves)-n ) current sampling instant N ) model horizon (process settling time in samples)P ) prediction horizonQ ) equal concern factor (controlled variable weight)Q V ) vapor boil-up rateR ) upper triangular and invertible QR factored matrix
R ) number of measured outputs RF ) reflux flows ) Laplace domain operatorS ) number of manipulated inputst ) sample timeu ) process input X B ) mole fraction of methanol in bottoms X D ) mole fraction of methanol in distillate y ) measured output y0 ) initial condition of measured output y ) predicted output ysp ) output set point z ) discrete time shift operator
Greek Symbols u
i) change in manipulated input at the i th instant
p ) effective process dead time ) move suppression coefficient (manipulated input
weight) ) eigenvalue mi n ) minimum absolute eigenvalue of the approximate
A T A matrix ma x ) maximum absolute eigenvalue of the appr oximate
A T A matrix c ) overa ll closed-loop t ime const an t n ) natural period of oscillation p ) overall process time constantB ) closed-loop bandwidth ) damping coefficient i
2 ) controlled variable weight (equal concern factor) inMIMO DMC
i2 ) move suppression coefficients in MIMO DMC T ) matrix of controlled variable weights T ) mat rix of move su ppression coefficients
Abbreviations
DMC ) dynamic mat rix contr olGP C ) generalized predictive controlITAE ) integral of time-weighted absolute errorIAE ) integral of absolute errorMP C ) model pr edictive controlPID ) proportional integral derivative
Li te ra ture Ci ted
Asbjornsen, O. A. Feed Forward Predictive and Adaptive Contr ol
by the Dynamic Matrix. Am . Control Conf . 1984 , 3 , 1864.Astrom, K. J .; Witt enma rk, B. In Computer Controlled Systems ,Theory and Design ; Kailath, T., Ed.; Prentice-Hall In forma tionan d System Science Series; Pren tice-Hall: Englewood Cliffs, NJ ,1984.
Callaghan, P. J . ; Lee, P. L. An Experimental Investigation of Predictive Controller Design by Principal Component Analysis.Chem . E ng . R es . Des . 1988 , 66 , 345.
Camacho, E. F.; Bordons, C. Model Predictive Control in theProcess Industry , Advances in Industr ial Control ; Springer-Verlag: London, 1995.
Clarke, D. W. Adv ances in M odel-Based Predictive Control ; OxfordUniversity Press: New York, 1994.
Clarke, D. W.; Scattolini, R. Constra ined Receding Horizon P redic-tive Contr ol. IEE Proc . 1991 , 138 (4), 347.
Clarke, D. W.; Mohtadi, C.; Tuffs, P. S. Generalized PredictiveControl-I. The Basic Algorith m. Automatica 1987a , 23 , 137.
Clarke, D. W.; Mohtadi, C.; Tuffs, P. S. Generalized PredictiveControl-II. Extensions and Interpreta tions. Automatica 1987b ,23 , 149.
Cohen, G. H.; Coon, G. A. Theoretical Considerations of RetardedControl. Trans . A S M E 1953 , 75 , 827.
Cutler, C. R. Dynamic Matr ix Contr ol, An Optimal Mult ivariableControl Algorithm with Constr aint s. Ph.D. Disserta tion, Uni-versity of Houston, Houston, TX, 1983.
Cutler , C. R.; Rama ker, D. L. Dynamic Matr ix Contr ol-A ComputerControl Algorith m. Proc . JACC ; San Fra ncisco, CA, 1980.
Downs, J . J .; Vogel, E. F.; Williams, V. J . Tuning a nd Sen sitivityStudy for Model P redictive Control. Am . Control Conf . 1988 ,3
, 2357.Farrell , R. J. ; Polli , A. Comparison of Unconstrained DynamicMatrix Control to Conventional Feedback Control for a FirstOrder Model. Ad v . Instrum . Control 1990 , 45 (2), 1033.
Fra nklin, G. F.; Powell, J. D. Digital Control of Dynamic S ystems ;Addison-Wesley Publishing Co.: Reading, MA, 1980.
Froisy, J . B. Model Predictive Contr ol: Past , Present a nd Fut ure. ISA Trans . 1994 , 33 , 235.
Garc a, C. E.; Morari, M. Interna l Model Contr ol. I. A UnifyingReview and Some New Results. In d . Eng . Chem . Process Des . Dev . 1982 , 21 , 308.
Garc a, C. E.; Morshedi, A. M. Quadra tic Pr ogram ming Solutionof Dynamic Matrix Control (QDMC). Chem . E ng . Commun .1986 , 46 , 73.
Garc a, C. E.; Pr ett , D. M.; Morar i, M. Model Pr edictive Control:Theory and Practice-A Survey. Automatica 1989 , 25 (3), 335.
Glova, P. J.; Snowden, D. L.; Yokum, F. H. Multivariable Control-
lers Applied at Plastics Facility. Ad v . Instrum . 1990 , 44 (2),521.Gupta, Y. P. A Simplified Model Predictive Control Approach.
Dept. of Chem. Eng., TUNS: Halifax, Canada, 1987.Gupta, Y. P. Chara cterist ic Equations and Robust Stability of a
Simplified Predictive Contr ol Algorithm. Can . J . Chem . Eng .1993 , 71 , 617.
Hinde, R. F.; Cooper, D. J . Using Pa tt ern Recognition in ControllerAdaptation and Performance Evaluation. Proc . Am . ControlConf ., IEEE Publ . 1993 , 74.
Hinde, R. F.; Cooper, D. J . A Unified Excitation a nd P erforma nceDiagnostic Adaptive Control Framework. AIChE J . 1995 , 41 ,110.
Hoerl, A. E.; Kenna rd, R. W. Ridge Regression: Biased E stim at ionfor Nonorth ogonal Problems. Technometrics 1970 , 12 (1), 55.
Hokanson, D. A.; Houk, B. G.; Johnston, C. R. DMC Control of aComplex Refrigerated Fractionator. IS A 1989 , 44 (2), 541.
Lalonde, A. M.; Cooper, D. J . Automated Design, Im plementa tionand Adaptation of the Genera lized Pr edictive Controller. Proc . Am . Control Conf ., IEEE Publ . 1989 , 1840.
Lee, J. H.; Yu, Z. H. Tuning of Model Predictive Controllers forRobust Performance. Comput . Chem . Eng . 1994 , 18 (1), 15.
Lundstr om, P .; Lee, J . H.; Morari, M.; Skogestad, S. Limita tionsof Dynam ic Matr ix Control. Comput . Chem . Eng . 1995 , 19 (4),409.
Marchetti, J. L. Ph.D. Dissertation, University of California, SantaBarbara, CA, 1982.
Marchetti , J . L.; Mellichamp, D. A.; Seborg, D. E. PredictiveControl Based on Discrete Convolution Models. In d . E ng .Chem . Process Des . Dev . 1983 , 22 , 488.
Maurath, P. R.; Mellichamp, D. A.; Seborg, D. E. PredictiveController Design by Principal Component Analysis. Proc . Amer . Cont . Conf ., IEEE Publications , 1985 , 1059.
Maurath, P. R.; Mellichamp, D. A.;







![Performance and Comparative Analysis of SISO, SIMO, … · Performance and Comparative Analysis of SISO ... is at a phase difference of 180 degree [1]. ... SISO system is that it](https://img.pdfslide.us/doc/110x75/5af4a7187f8b9a92718dd60f/performance-and-comparative-analysis-of-siso-simo-and-comparative-analysis.jpg)