Embed Size (px)
Citation preview

A Tunably Compliant Origami Mechanism for Dynamically DexterousRobots
Wei-Hsi Chen1, Shivangi Misra4, Yuchong Gao2, Young-Joo Lee1,2,Daniel E. Koditschek1, Shu Yang2, Cynthia R. Sung3
Abstract— We present an approach to overcoming challengesin dynamical dexterity for robots through tunable origamistructures. Our work leverages a one-parameter family of flatsheet crease patterns that folds into origami bellows, whoseaxial compliance can be tuned to select desired stiffness. Con-centrically arranged cylinder pairs reliably manifest additivestiffness, extending the tunable range by nearly an order ofmagnitude and achieving bulk axial stiffness spanning 200–1500N m−1 using 8 mil thick polyester-coated paper. Accordingly,we design origami energy-storing springs with a stiffness of1035 N m−1 each and incorporate them into a three degree-of-freedom (DOF) tendon-driven spatial pointing mechanism thatexhibits trajectory tracking accuracy less than 15% rms errorwithin a (∼2 cm)3 volume. The origami springs can sustain highpower throughput, enabling the robot to achieve asymptoticallystable juggling for both highly elastic (1 kg resilient shotputball) and highly damped (“medicine ball”) collisions in thevertical direction with apex heights approaching 10 cm. Theresults demonstrate that “soft” robotic mechanisms are able toperform a controlled, dynamically actuated task.
I. INTRODUCTION
Over decades of robot manipulation [1] and locomotion [2]research, the term dynamical dexterity has come to meanthe programmed [3] exchange of work and information athigh temporal rates [4]. Indeed, sensorimotor dexterity [5] isessential to the quality of our daily life [6], specifically inthe high-strength regime [7]. As robots begin to enter the un-structured workplace, their users’ expectation of companion-able dexterity will continue to sharpen the intrinsic conflictbetween the need for more actuated degrees of freedom andthe requirement of high power density [8], whose limits inthe relevant highly energetic and high strength regime havelong manifested as the first scarce resource in conventionalrobot actuation technologies [9].
The use of soft materials of varied shape and tunablecompliance enjoys an active literature in contemporaryrobotics [10] and beyond [11] as a method for introducingboth high maneuverability and resilience directly into thebody of a robot. However, while compliant elastomericrobots have have occasionally been demonstrated to producefast, dynamic [12], and even explosive [13] maneuvers, thehigh damping and high fatigue properties in these elastomersoften limit these maneuvers to a single use. Meanwhile,sustained dynamic motions needed for tasks such as juggling,
1Department of Electrical and Systems Engineering, 2Department ofMaterials Science and Engineering, 3Department of Mechanical Engineeringand Applied Mechanics, 1234University of Pennsylvania, General Robotics,Autonomous, Sensing and Perception (GRASP) Lab
hopping, and trotting, remain out of reach for most softrobots.
Origami-inspired approaches to replacing [14], [15], [16]or enhancing [17] soft-bodied machines promise to addressthese challenges in achieving repeated, dynamic movement.Past research in this field has demonstrated durable actuatorsfrom origami cylinders, yielding lightweight structures [18],[19] patterned by high compliance folds. The resulting actu-ators assert high specific force [20] over a large volume-to-mass workspace [21], and bear substantial loads [17] whileresisting unwanted (e.g., torsional) disturbances [22]. How-ever, to date, origami robots have been designed as thoughwith rigid linkages joined through rotational folds, withouttaking into consideration of the additional compliance andresiliency provided by the sheet material itself. As a result,they have been unable to match the power densities of therigid-body counterparts.
In this paper, we explore the prospects for integratingtunable compliance and highly energetic anisotropic designsin the drive train of a three DOF robotic limb through thelens of the vertical one-juggle [1], a well established routetoward dynamically dexterous manipulation and locomo-tion [23]. Through geometric designs of an origami bellowpattern [24], we aim to achieve elastic axial compliancewith reduced material weight and mitigation of energeticloss, thus producing a “soft” spring robotic juggler capableof high-power operation. It has been suggested in origamimechanics [25], [26] that the resistance of an origami designto static loading conditions can be tuned through appropriatechoices of its geometric parameters. Here, we demonstratethat the dynamic response of an origami pattern can also betuned, and that the resulting structure is in fact capable oftransducing the high power densities required for dynamicaldexterity.
Specifically, we leverage the Reconfigurable ExpandingBistable Origami (REBO) pattern [24], which was originallydesigned for geometric reconfiguration. Interestingly, we findthat small changes in the fold pattern alter not only thegeometry of the structure, but also its rigidity. Thus, wemanipulate the REBO design parameters for a dynamicjuggling task and introduce a concentric pairing of theREBO cylinders to enhance stiffness. We drive three suchconcentrically paired cylinders to achieve 3× 103 N m−1
stiffness and compress each via a conventionally actuatedtendon. The resulting three-DOF “limb” achieves reasonablygood trajectory tracking (less than 15% rms error) withina workspace whose actuated volume is limited to a small
arX
iv:1
910.
1358
4v1
[cs
.RO
] 2
9 O
ct 2
019

𝑎" − 𝑏"
𝑎% − 𝑏%
𝛼 cone angle 𝛽(
Valley foldMountain foldCutAdhesive
𝛼
𝑎"ℎ 𝑏"
𝑎% 𝑏%
outer radius 𝑟%
inner radius 𝑟" ∆𝑧
𝐻
𝛽.
(a)
(b) (c)
𝜃 ℎ
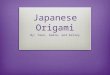
Fig. 1. Origami REBO design (a) the crease pattern of REBO (b) schematicdiagram of one layer of REBO when folded flat (c) schematic diagram ofthe cross section of the right half of the the double layer REBO structure,where the purple and orange line indicates different layers. β denotes thecone angle, where the index indicates the different layer
fraction of its kinematically achievable span by the torqueoutput of the brushless DC motors. Nevertheless, this vol-ume affords adequate travel and the paired REBO cylinderstransduce sufficiently high power to achieve asymptoticallystable vertical juggling of balls of varied mass and resilience.
In summary, the contribution of this work is the de-velopment, analysis, and application of a new approachfor dynamically dexterous manipulation; it substitutes anorigami structure for a conventional spring, storing sufficientenergy and transducing it with sufficient power and force tojuggle stably a 1 kg mass to a height selectable over a rangeof nearly 10 cm, from initial conditions within a simlarlylarge basin of attraction.
II. ORIGAMI MODULE DESIGN
A. Parameterized Programmable Crease Pattern
The REBO design (Fig. 1(a)) is an origami bellows. Thefold pattern is a tessellation of rectangular units arrangedinto nr columns and nl rows, with the left and right columnsglued together to form a tube. Each unit contains a middlecrease at an angle α from horizontal, as shown in the greybox in Fig. 1(a). When folded, these creases cause each rowof the structure to collapse into a nr-sided right frustum withheight 1
2∆z and side lengths (ao − bo) and (ai − bi) on thelarger and smaller bases (Fig. 1(b)). We define the anglebetween the base and side of the layer as the cone angle β.
There is a direct relationship between the geometric pa-rameters of the fold pattern and those of the 3-D folded state.In particular, the rotation angle θ of each trapezoid shown inFig. 1(b) is θ = (2π cosβ)/nr. The values of α and h can
(45°)
40 mm
(40°) (35°) (30°) (25°) (20°) (15°)
(a)
(d)(c)
(f)(e)
(b)
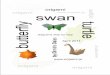
Fig. 2. Material performance, stiffness vs. cone angle: (a) specimens ofdifferent cone angles (b) the double layer REBO structure with a transparentouter layer and a white inner layer. (c) compression force vs. displacement(d) linear fit of the stiffness experiments (e) stress vs. strain (f) cyclic test
then be calculated as
α = (π − θ)/2 (1)h = ∆z cscβ. (2)
The design has the ability to store potential energy in thebending of the folds and the stretching of the faces, similarlyto the multistable “bendy straw” design [27]. Interestingly,by changing the size of the design and geometric parameterssuch as β and ∆z, the amount of structural deformationrequired for the design to bend and compress can be manip-ulated, thus allowing us to control the stiffness of the designpurely through its geometry. When β is 0, the folded stateis a flat polygon with little resistance to axial forces. Thisis because the flat folded configuration relies on torsionalstiffness in the folds, which is typically small. As β increases,the slope of each layer increases, and REBO cannot befolded flat without deformation of the fold surfaces. In otherwords, the potential energy of compressing the structureis now stored not only in the folds, but also in the sheetsurfaces, making the structure stiffer. Thus by designing β,one can generate spring-like structures with variable degreeof stiffness.
B. Effect of Cone Angle on Stiffness
To understand the relation between the cone angle and thestiffness of the REBO, we folded multiple versions of thepattern with variable geometric parameters and conductedcompression tests. All samples were folded out of 8 milthick Durilla synthetics paper with polyester finish (CTIPaper, USA) and used 3M 467MP adhesive transfer tape to

glue the left and right sides together as a closed cylinder.The parameters chosen for this study were as follows:ao = 20 mm, bo = 6 mm, ∆z = 10 mm, nr = 6, and a totalof nl = 8 layers. We tested cone angles β between 15◦ and45◦, with increments of 5◦ in between. The crease patternsare then generated from a MATLAB script. Fig. 2(a) showsthe results of the fabrication. The theoretical rest length ofall of these REBO structures should be lt = nl∆z = 80 mm.However, due to the imperfection of manual folding, the finalrest lengths are not equal, and in fact decrease as β increase.The true rest lengths lreal were measured and used for thefollowing experiments.
We used an Instron Model 5564 with 100N compressionload cell to measure the force required to compress eachspecimen from its natural length lreal until all the layers werestacked flat and the force exceeded 40N. Each specimen wasmeasured 5 times.
The result of the experiment is shown in Fig. 2(c). Theshaded regions show the minimum and maximum force val-ues corresponding to each displacement for the sample. Theresults show that REBO structure exhibits a Hookean force-displacement curve for well over 2/3 of its total travel. Wecomputed the effective stiffness (elastic constant) as the slopeof the linear fit in this region. The sharp increase in stiffnessat the end of the curve corresponds to all of the layerscoming into contact with each other so that the specimencan be viewed as a solid cylinder. This region should beavoided during application. Fig. 2(d) summarizes the meaneffective stiffness for each of the measured samples. A linearfit indicates that the stiffness Ks increases as a roughly affinefunction of the cone angle β, Ks = 16.0571β−43.7143, withR2 = 0.9548. The REBO design was able to achieve a broadrange of stiffnesses from 210 N m−1 to 730 N m−1.
We computed stress-strain curves for each of the speci-mens (Fig. 2(e)). Strain was calculated using the real restlength lreal and the stress was the compression force actingon the effective hexagonal area A = 3
√3(ao − bo)2, with
the Young’s modulus as the slope of the resulting curve.The results show that the cone angle does indeed have asignificant effect beyond simply changing the length of theREBO.
During experiments, we found that the dimensions of theREBO affect the stress-strain profile. For REBOs with thesame cone angle β, a larger side length and height reducesthe Young’s modulus. As a result, a higher β is required toachieve a similar profile for a larger-scale model. The scalingstudy of this REBO structure will be the focus of future work.
C. Double-Layered Design
The results show that a maximum stiffness of 730 N m−1
for the REBO design is achieved at β = 45◦. Above this βvalue, the structure is at risk of buckling irreversibly uponcompression. However, higher stiffness can be achieved byarranging multiple REBO structures concentrically, as shownin Fig. 1(c) and 2(b). This parallel spring structure demon-strates additive stiffness and protects against snap-throughbuckling to the bistable inverted configurations, which were
TABLE ISTIFFNESS OF DOUBLE-LAYERED REBO
Inner layer (βil) Outer layer (βol) Double layer
320Nm−1 (25◦) 540Nm−1 (35◦) 888Nm−1
320Nm−1 (25◦) 725Nm−1 (45◦) 1035Nm−1
700Nm−1 (35◦) 725Nm−1 (45◦) 1490Nm−1
previously demonstrated in other applications [24]. Here,three sets of double layer structure have been fabricated,with the cone angle of the inner and the outer structure to be(25◦, 35◦), (25◦, 45◦), and (35◦, 45◦), respectively. To facil-itate the fabrication of the double layered REBO structure,we increased bo to make room for the inner structure to slidethrough, then refolded it to enclose it. A compression test wasperformed before and after the combination and the stiffnessof each specimen was measured (see summary of results inTable I). The stiffness of the double layer structure is indeedthe sum of the stiffness of the two individual layers with amaximum error of only 3.2%. It is to our observation thatby increasing bo, the stiffness decreases a little due to thefact that there is more space for the paper to deform.
D. Repeatability and Energy Loss
Finally, for dynamic robot applications, it is important tounderstand the energy dissipation and resilience of the REBOdesign. We therefore experimentally measured the responseof a β = 45◦ REBO under cyclic loading. The specimen wasalternately compressed and released between its original restlength and 40 mm displacement for 2000 cycles. Each cycletook 12 seconds. The results are shown in Fig. 2(f).
While the first cycle (red) required much higher forcesthan the rest of the trials, the response of the REBO quicklyconverged to the blue curve after the second trial, andremained consistent for the rest of the trials. This behavioris consistent with literature in origami mechanics, wherethe first folding is often an outlier [28] since it plasticallydeforms the material and changes the structure’s equilibriumstate.
For repeated dynamic tasks, we are primarily concernedwith the steady-state behaviors, i.e., the blue curve. Weobserved elastic hysteresis between the tension and compres-sion portions of the tests, suggesting that more energy wasrequired for loading comparing to unloading, and thermalenergy was dissipated during this process. The displacementoffset after 2000 runs is small compare to the original length,with a maximum of 3 mm, 5% of the rest length. After 2000cycles, no physical damage was observed on the specimenand no failure was found on the force-displacement plot.
III. JUGGLING ROBOT DESIGN
Our characterization shows that stiffness on the order of103 N m−1, the range where energy exchange with 1 kg loadshas been shown to achieve useful aerial-phase compliant-legged running gaits [29], can be easily accessible, andimportantly that this performance does not degrade over

REBO structure
Motor module
Pulley
Tendon guiding structure
Tendon
Force sensor
Top plate
Bottom plate
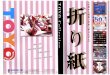
Fig. 3. CAD rendering of the REBO Juggler
repeated uses. Armed with the understanding, we integratethe programmable compliance design to legged robots inthe form of the “REBO Juggler.” Juggling a weighted ballcontinuously at a certain height requires a periodic motionand great power, similar to many dynamical locomotiontasks.
A. Robot Platform
The robot (Fig. 3) consists of four main parts: (a) thecompliant REBO body, (b) force transmitting system com-posed of brushless DC electrical motor modules (GhostRobotics MNSB01 Sub-Minitaur U8 Motor Module [30])with tendon (Sufix 832 Advanced Superline Braid) and3D-printed pulley system, (c) contact detection using forcesensor (Ohmite FSR01CE), and (d) a microprocessor (GhostRobotics MNS043 mainboard [30]) for integrating sensingand control. The compliant body, shown in Fig. 4(a), iscomposed by three double-layered REBO structures with astiffness of 1035 N m−1 each. The parameters of the outerlayer are β = 45◦, ao = 20 mm, bo = 5 mm, ∆z = 10 mm,nr = 6, nl = 8, and the ones for the inner layer areβ = 25◦, ao = 19 mm, bo = 0 mm, ∆z = 10 mm, nr = 6,nl = 8. Each REBO weighs about 16 g. Three REBOs werethen mounted between the top and bottom acrylic plates andsecured using tabs, forming the compliant body that weighsabout 220 g. The tendon was laced through the structuralthrough-holes of REBO, with one end fixed on the top plateand the other on the pulley mounted on the motor. Rotatingthe motor compressed or released the REBO, and the speedlimitation of the linear motion on REBO was determined bythe motor. A force sensor was placed on top of the top plateto detect when an object was in contact with the top plate.
B. Kinematic Model
The robot platform can be modeled as two equilateral tri-angles connected at the corners by three tendons (Fig. 4(b)),where the change of tendon length changes the position andorientation of the top triangle. Let the origin of the model beat the center of the bottom triangle. The top and the bottom
𝑙"
𝑙#
𝑙$
𝜃𝜙
𝑑
𝑅
pc
(b)(a)
Fig. 4. (a) The compliant body composed of REBO. (b) Kinematic modelof the REBO Juggler’s tendon driven top plate under compressive load
triangles have circumcircles of radius d. The linear actuatorstate is defined as qla = (l1, l2, l3) ∈ [lmin, lmax]3 = Qla,where l1, l2, and l3 are the length of the three parallellinear actuators, and lmin, lmax are the length constraintsof the actuators. The tendon is attached to a pulley mountedon the motor, where the motor state is defined as qm =(θm,1, θm,2, θm,3) ∈ T3 = Qm, and the mapping from themotor space to the linear actuator space qla = f1(qm) is:
li = l0 + rpθm,i (3)
where the index i indicates different actuator pairs, l0 = lmax
is the rest length of REBO, rp is the radius of the pulley andθm,i is the angle of rotation of the corresponding motor.
The position vector of the center of the top triangle is pc.For this three DOF system, the orientation of the top triangleis coupled with its position, which can be fully describedwith qtt = (r, θ, φ) ∈ [lmin, lmax]× S1× S1 = Qtt, where ris the length of pc, θ is the angle between pc and the x axis,and φ is the angle between pc and the y axis. The kinematicsqtt = f2(qla) can found by observing the geometry of themodel to be:
r = 13 (l1 + l2 + l3) (4)
θ = cos−1(
16d (−2l1 + l2 + l3)
)(5)
φ = cos−1(
12√3d
(−l2 + l3)). (6)
The position vector pc =[xc yc zc
]T ∈ R3 can bedescribed in Cartesian coordinates as
pc = fcc(qtt)
: =[r cos θ r cosφ r
√1− cos2 θ − cos2 φ
]T.
(7)
When controlling the robot, the input command to the motorcan be found by the inverse map of the kinematics as
qm = f−11 ◦ f−12 ◦ f−1cc (pc). (8)
IV. KINEMATIC TASK: POINTING
The trajectory of the REBO Juggler’s top plate can beplanned within its constrained workspace, and the controllingcommand of the motor can be found through the inverse mapas shown in Eq. (8). The kinematically achievable workspaceof the top plate is the image through the kinematic model ofthe extreme of the length of the tendon lmax and lmin and

(a)
(b) (c)
Desired Experiment
𝒲
𝒲"
Fig. 5. (a) The kinematically achievable workspace W and the actuatorachievable workspace Wa of the REBO Juggler’s Top plate. The coloredbent cuboid is the simulation where the red line is the experimentaltrajectories of the envelope of the workspace. (b) horizontal circle test (c)vertical circle test.
can be described asW = {pc|pc = fcc◦f2(qla), qla ∈ Qla}.The actuator achievable workspaceWa is a subset of the fullworkspace W , and is limited by the continuous torque τc ofthe motor, where its minimum value can be found as lmin =lmax − (τc/rp)/Ks, where Ks is the effective stiffness ofone REBO. Since this research explores the structure withhigh stiffness, the achieved compression = lmax − lmin issmall. Fig. 5 shows the image through the kinematic modelW , with lmax = 88 mm and lmin = 66 mm. The constrainedworkspace Wa has a volume of 4980.95 mm3.
To demonstrate the mobility of the top plate, we trackedthe position of the top plate under varying control inputsusing an OptiTrack motion capture system. The first exper-iment was a open-loop workspace boundary test. It can beseen from Eq. (4) that the boundary of the workspace occurswhere two of the linear actuators are at their maximum (orminimum) length and the third changes length. We thereforemeasured the trajectory of the top plate when each linearactuator was moved between lmin and lmax individuallywhile holding the other constant. The experimental resultsare shown as the red trajectories in Fig. 5(a), which capturethe structure of the simulated workspace, and has a 14.4%rms error from the predicted boundary. The volume of theconvex hull of these trajectories is 5426.26 mm3, which hasa 8.94% error from the predicted volume.
To check the accuracy of the kinematic model, we com-manded the top plate of the robot to follow circular trajecto-ries that were generated to lie within the workspace. The topplate was set to follow first a horizontal circle with radius7 mm, then a vertical circle with radius 6 mm, both centeredat[0 0 1
2 (lmin + lmax)]T
. Fig. 5(b) and 5(c) show the re-
(c)
𝜒≤𝑝$%%𝜒
≥𝑝 $
'()*
(b)
(e)(d)
Flight
(a)
6.7 mm 9.5 mm 12.5 mm 15.2 mm 17.2 mm
0.0 0.5 1.0 1.5-20
0
20
40
60
80
100
Time (sec)
Height(mm)
●
●● ● ● ● ● ● ● ● ●
●●
● ● ● ● ● ● ● ● ●● ●
● ●● ● ● ● ● ● ●
●
● ● ● ●●
● ● ● ● ●
●
●
●
● ● ● ● ● ● ● ●
0 2 4 6 8 100
20
40
60
80
100
120
Iteration
Apex(mm)
●
●
●●
●
● ●●
●
●
◆◆
◆◆
◆
◆◆
◆
◆
◆
● 225g medicine ball● 450g medicine ball◆ 1000g shot◆ 1400g shot
6 8 10 12 14 16 180
20
40
60
80
100
Compression (mm)
Apex(mm)
Hit
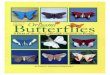
Fig. 6. Vertical juggling (a) Snapshot of the experiment with an intervalof 1/30 sec. (b) State machine of the juggling task. (c) Trajectory of the1 kg shot under different pre-pressed REBO conditions. (d) Pre-pressedlength of REBO v.s. juggling height of several different balls with STDs.(e) Transient responses (apex vs. iteration) of the 1 kg shot from a varietyof initial heights, exhibiting the asymptotically stable fixed point at 4 cmassociated with the 12.5 mm pre-compression setting plotted in (d).
sults of the two experiments. The root mean square errors forthe two tracking tests were 11.32% and 14.66%, respectively.Fig. 5(c) shows that the real and desired trajectories of thevertical circle deviate closer to the bottom. This is becausethe actuator needs more torque for greater compression, yetis limited by the motors’ maximum continuous torque. Thislimitation is expected to be eliminated when we change toa motor with a greater torque or have a higher bandwidthcontroller.
V. DYNAMICAL TASK: VERTICAL JUGGLING
Reflecting the past traditions of the field of dynamicallocomotion, the core problem of stable running [31] can bereduced to the problem of stable vertical hopping [32], forwhich a purely vertical juggle is a representative surrogate[33], [34]. Thus, as a proof-of-concept task, the REBOjuggler’s ball, its dynamical ”environment,” is restricted topurely vertical motion by confinement within a tube mountedon the paddle, while the parallel three REBO elements canbe viewed as an actively loaded single virtual vertical spring.Since the REBO exhibits elastic hysteresis, the total energyof the ball would be substantially diminished by each en-counter with a relaxed paddle, hence additional energy mustbe pre-loaded into the waiting spring so as to impart at eachhit the work needed to keep the ball bouncing. Specifically,to pump energy into the coupled robot-environment system,the motors work on the REBO by pre-compressing it to afixed position pcp , before the ball lands on the paddle. Whenthe sensing pad detects contact, the REBO then releases the

energy into the ball by resetting the set point of the tendonto its rest length pcr . Fig. 6(a) shows a successful jugglingperiod of one of the open-loop experiments presented in thissection.
Juggling arises from a hybrid dynamical system compris-ing two modes: “Flight” and “Hit”, as shown in Fig. 6(b).In the “Flight” mode, the launched ball exhibits a ballistictrajectory governed by the lossless constant gravity systemmbχ = −mbg, where mb and χ are the mass and the positionof the ball, respectively. After the ball’s launch, the jugglerquickly resets back to its pre-compressed position. Becausethe compliant REBO structure has a mass that is negligible(less by at least an order of magnitude) relative to that ofthe frame or ball, we ignore any REBO dynamics and treatthe reset as instantaneous. The “Flight” mode stops when theforce sensor on the paddle is triggered by the ball’s contactand the system enters the “Hit” mode. Now, the ball ridesdown the paddle of the compressing REBO structure, andthe whole system can be considered as a mass on a spring.The REBO elastic energy is imparted to the ball’s mass asgoverned by the dynamics mbχ = −Kes(χ−rrest)−Bsχ−mbg, where Kes = 3Ks is the juggler’s effective stiffnessand Bs its damping coefficient. The “Hit” mode ends whenthe REBO reaches its rest length, whereupon the ball liftsoff as reported by the force sensor, the motor re-engages thetendon, and the system re-enters the “Flight” mode.
REBO’s Hookean force-extension curve (Fig. 2(c)) impliesthat the more it is compressed, the more energy it stores;hence, because it can sustain high forces under load, thejuggler injects more energy into the ball in “Hit” mode withgreater pre-compression, resulting in higher apex positions.Fig. 6(c) documents this increase in vertical oscillationamplitude for a 1 kg shot under increasing commandedpre-compression lengths pcom = pcr − pcp . A slowmotion video of 120 fps has been filmed for every trialand the trajectory of the ball was found using “Tracker”(https://physlets.org/tracker/). The result confirms that themore the REBO is pre-compressed, the higher the ball canbe juggled.
Fig. 6(d) summarizes the results of repeated (100 jugglingcycles each) experiments with several different balls beingjuggled under different pre-compressed lengths by plottingthe mean and standard deviation of measured apex heights.Two shots of mass 1 kg and 1.4 kg were selected becausetheir resilient rigid metal composition yields an approxi-mately elastic collision, presenting a “lossless environment”to the juggler. In contrast, two sand-loaded medicine ballsof mass 225 g and 450 g yield highly inelastic collisionschosen to confront the juggler with a “highly dissipativeenvironment.” It is clear that the average apex height ismonotonically increasing with respect to the pre-compressionfor all the balls. For the same compressive pre-load condition,the heavier balls have a lower apex than the lighter ones asexpected if each pair is restored to the same steady energystate. Here, since the medicine balls dissipate more storedenergy than the shots, making them harder to juggle, thejuggler lofts the 225 g ball to roughly the same steady state
apex as the 1000 g shot. We can summarize the energeticproperties of the REBO structure with respect to its workon the balls as follows. The energy loaded into the REBOstructure by the DC servos’ pre-compression work is E =12Kes|pcom|2 = 1
2 (3105) ∗ (0.0172)2 ≈ 0.5 J for the 1 kgshot bounced at a height of 8 cm. Since the “Hit” mode hasa typical duration of 0.02 s the REBO delivers a mechanicalpower output of 25 W.
Fig. 6(e) plots the trajectories over the course of the firstten successive collisions (out of hundreds recorded) withthe juggler’s paddle of the apex heights of the 1 kg shotstarting from five different initial conditions, all subject to thesame pre-compressed REBO length of 12.5 mm. Treating theapex height as the coordinate chart for the Poincare sectionof this hybrid dynamical system, the plot demonstrates theasymptotic stability of the period one hybrid limit cycle bydisplaying convergence to the 4 cm fixed point of the asso-ciated Poincare (or “return”) map [33]. The results suggestthe relatively large basin of attraction (set of initial heightsthat are successfully juggled up or down to the desired 4 cmsteady state apex height) achieved by the juggler consistentwith a high power actuator along the lines discussed in [34].
VI. DISCUSSION AND FUTURE WORK
The resilient, tunable stiffness of the lightweight, de-formable REBO structure allows us to transfer energythrough the 1kg shot at roughly 25 W, repeatedly overthe course of thousands of hits with very little fatigue,as attested by the highly repeatable asymptotically stablesteady state juggling cycles, lofting 1 kg loads to nearly10 cm heights. Thus, the REBO breaks new ground in thesoft robotics literature by transducing energy, 25/0.25 ≈100 (W/kg) which, when distributed across the repeatingorigami structure, is sufficient to power the task of verticaljuggling — an established route to dynamical dexterity inconventional robotics [33]. Indeed, we have begun work toturn the REBO juggler “upside down,” aiming for a powerautonomous “soft” hopper capable of lifting its batteriesand actuators to comparable apex states. The experimentspresented here focus on merely modifying the cone angle βfor REBOs made of the same materials with the same thick-nesses and having the same number of sides and side lengths.Future work yielding a more formal understanding of theREBO’s properties will afford scaling laws that achieve ageneralizable tunably compliant design methodology for abroad range of robotics applications.
ACKNOWLEDGMENT
This work is supported in part by the Army Re-search Office (ARO) under the SLICE MultidisciplinaryUniversity Research Initiatives (MURI) Program, award #W911NF1810327. We thank Diego Caporale for technicalconsultant and Diedra Krieger for administrative support.

REFERENCES
[1] M. Buehler and D. E. Koditschek, “Robotics in an intermittentdynamical environment: A prelude to juggling,” in Proc.26th IEEE Conference on Decision and Control., Dec1987. [Online]. Available: https://kodlab.seas.upenn.edu/uploads/Kod/BuehlerKoditschek87prelude juggling.pdf
[2] M. Buehler and D. Koditschek, “Analysis of a simplified hoppingrobot,” in , 1988 IEEE International Conference on Robotics andAutomation, 1988. Proceedings, Apr 1988, p. 817819 vol.2.
[3] R. R. Burridge, A. A. Rizzi, and D. E. Koditschek, “Toward a systemstheory for the composition of dynamically dexterous robot behaviors,”in ROBOTICS RESEARCH-INTERNATIONAL SYMPOSIUM-, vol. 7,1996, p. 149161.
[4] A. Rizzi and D. Koditschek, “An active visual estimator for dexter-ous manipulation,” Robotics and Automation, IEEE Transactions on,vol. 12, no. 5, p. 697713, 1996.
[5] M. Venkadesan, J. Guckenheimer, and F. J. Valero-Cuevas, “Manipu-lating the edge of instability,” Journal of Biomechanics, vol. 40, no. 8,p. 16531661, Jan 2007.
[6] E. L. Lawrence, I. Fassola, I. Werner, C. Leclercq, and F. J.Valero-Cuevas, “Quantification of dexterity as the dynamicalregulation of instabilities: Comparisons across gender, age, anddisease,” Frontiers in Neurology, vol. 5, 2014. [Online]. Available:https://www.frontiersin.org/articles/10.3389/fneur.2014.00053/full#B1
[7] F. J. Valero-Cuevas, N. Smaby, M. Venkadesan, M. Peterson, andT. Wright, “The strengthdexterity test as a measure of dynamic pinchperformance,” Journal of Biomechanics, vol. 36, no. 2, p. 265270, Feb2003.
[8] S. Revzen and D. E. Koditschek, “Why we need more degrees offreedom,” Procedia IUTAM, vol. 20, pp. 89–93, 2017.
[9] I. W. Hunter, J. M. Hollerbach, and J. Ballantyne, “A comparativeanalysis of actuator technologies for robotics,” Robotics Review, vol. 2,p. 299342, 1992.
[10] C. Laschi and M. Cianchetti, “Soft robotics: new perspectives for robotbodyware and control,” Frontiers in bioengineering and biotechnology,vol. 2, p. 3, 2014.
[11] L. L. Howell, Compliant mechanisms. John Wiley & Sons, 2001.[12] A. D. Marchese, C. D. Onal, and D. Rus, “Autonomous soft robotic
fish capable of escape maneuvers using fluidic elastomer actuators,”Soft Robotics, vol. 1, no. 1, pp. 75–87, 2014.
[13] M. T. Tolley, R. F. Shepherd, M. Karpelson, N. W. Bartlett, K. C.Galloway, M. Wehner, R. Nunes, G. M. Whitesides, and R. J. Wood,“An untethered jumping soft robot,” in 2014 IEEE/RSJ InternationalConference on Intelligent Robots and Systems. IEEE, 2014, pp. 561–566.
[14] C. D. Onal, R. J. Wood, and D. Rus, “An origami-inspired approachto worm robots,” IEEE/ASME Transactions on Mechatronics, vol. 18,no. 2, pp. 430–438, April 2013.
[15] B. A. Jones and I. D. Walker, “Kinematics for multisection continuumrobots,” IEEE Transactions on Robotics, vol. 22, no. 1, pp. 43–55,2006.
[16] W. McMahan, B. A. Jones, and I. D. Walker, “Design and imple-mentation of a multi-section continuum robot: Air-octor,” in Proc. ofIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, 2005, pp.2578–2585.
[17] S. Li, J. J. Stampfli, H. J. Xu, E. Malkin, E. V. Diaz, D. Rus, andR. J. Wood, “A vacuum-driven origami “magic-ball” soft gripper,” in2019 International Conference on Robotics and Automation (ICRA),May 2019, pp. 7401–7408.
[18] A. M. Hoover, E. Steltz, and R. S. Fearing, “RoACH: An autonomous2.4 g crawling hexapod robot,” in 2008 IEEE/RSJ InternationalConference on Intelligent Robots and Systems, 2008, pp. 26–33.
[19] J. P. Whitney, P. S. Sreetharan, K. Y. Ma, and R. J. Wood, “Pop-up book MEMS,” Journal of Micromechanics and Microengineering,vol. 21, no. 11, p. 115021, 2011.
[20] R. V. Martinez, C. R. Fish, X. Chen, and G. M. Whitesides,“Elastomeric origami: programmable paper-elastomer composites aspneumatic actuators,” Advanced functional materials, vol. 22, no. 7,pp. 1376–1384, 2012.
[21] K. Zhang, C. Qiu, and J. S. Dai, “An extensible continuum robotwith integrated origami parallel modules,” Journal of Mechanisms andRobotics, vol. 8, no. 3, p. 031010, 2016.
[22] J. Santoso, E. H. Skorina, M. Luo, R. Yan, and C. D. Onal, “Designand analysis of an origami continuum manipulation module withtorsional strength,” in 2017 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), Sep. 2017, pp. 2098–2104.
[23] A. Johnson and D. Koditschek, “Legged self-manipulation,” IEEEAccess, vol. 1, p. 310334, 2013.
[24] H. Yuan, J. H. Pikul, and C. Sung, “Programmable 3-d surfaces usingorigami tessellations,” in 7th International Meeting on Origami inScience, Mathematics, and Education, 2018, pp. 893–906.
[25] A. Reid, F. Lechenault, S. Rica, and M. Adda-Bedia, “Geometry anddesign of origami bellows with tunable response,” Physical Review E,vol. 95, no. 1, p. 013002, 2017.
[26] E. T. Filipov, T. Tachi, and G. H. Paulino, “Origami tubes assembledinto stiff, yet reconfigurable structures and metamaterials,” Proceed-ings of the National Academy of Sciences, vol. 112, no. 40, pp. 12 321–12 326, 2015.
[27] N. P. Bende, T. Yu, N. A. Corbin, M. A. Dias, C. D. Santangelo, J. A.Hanna, and R. C. Hayward, “Overcurvature induced multistability oflinked conical frusta: how a bendy strawholds its shape,” Soft matter,vol. 14, no. 42, pp. 8636–8642, 2018.
[28] C. Qiu, V. Aminzadeh, and J. S. Dai, “Kinematic analysis and stiffnessvalidation of origami cartons,” Journal of Mechanical Design, vol. 135,no. 11, p. 111004, 2013.
[29] K. C. Galloway, J. E. Clark, and D. E. Koditschek, “Design of amulti-directional variable stiffness leg for dynamic running,” in ASME2007 International Mechanical Engineering Congress and Exposition.American Society of Mechanical Engineers, 2007, pp. 73–80.
[30] “Ghost Robotics,” https://www.ghostrobotics.io.[31] M. H. Raibert, Legged robots that balance. MIT press, 1986.[32] ——, “Dynamic stability and resonance in a legged hopping machine,”
in Conference on Theory and Practice of Robots and Manipulators,IFToMM, 1983, pp. 352–367.
[33] M. Buehler, D. E. Koditschek, and P. Kindlmann, “A simple jugglingrobot: Theory and experimentation,” in Experimental Robotics I.Springer, 1990, pp. 35–73.
[34] D. E. Koditschek and M. Buehler, “Analysis of a simplified hoppingrobot,” The International Journal of Robotics Research, vol. 10, no. 6,pp. 587–605, 1991.