Embed Size (px)
Citation preview

Acta MechDOI 10.1007/s00707-013-0964-5
Yasser Aboelkassem · Anne E. Staples
A three-dimensional model for flow pumpingin a microchannel inspired by insect respiration
Received: 10 November 2012 / Revised: 18 July 2013© Springer-Verlag Wien 2013
Abstract We present a three-dimensional model for flow pumping in a channel induced by two movingcontractions from the upper wall. This pumping model is inspired by insect respiration processes, specifi-cally, the rhythmic collapses that take place within their tracheal tube networks. The present work is a naturalextension of our previous theoretical and numerical investigations of a two-dimensional insect-inspired micro-pumping model, which accounts for three-dimensional effects and further validates our insect-inspired pumpingparadigm (Aboelkassem and Staples in Acta Mech 223(3):463–480, 2012a; Theor Comput Fluid Dyn, 2012b.doi:10.1007/s00162-012-0269-7). The formal goal of this article is to compare three-dimensional Stokeslets-meshfree numerical results with results from our previous two-dimensional analytical pumping model. We useregularized Stokeslets-meshfree computations in three dimensions to reconstruct the flow motions induced bywall contractions and to calculate the time-averaged net flow pumping rate. The results show that, although thenet flow rate distribution as a function of the wall motion time (phase) lag parameter for the three-dimensionalStokeslets-meshfree computations and the two-dimensional analytical model displays some differences, thesame basic features appear in both cases, leading to the same general conclusions about the proposed pumpingparadigm.
1 Introduction
Biologically inspired MEMS are currently one of the several potential novel paths toward miniaturizing equip-ment for chemical analysis and synthesis in the frame work of lab-on-a-chip applications. This will be madepossible by the development of technologies for fabricating micro- and nano-scale structures that can serve asthe components of a laboratory, such as pumps, valves, and separators, where all of the components are built andassembled on a single chip. Therefore, several bio-microfluidics pumping devices inspired by physiologicalsystems in biological organisms (in particular, insects) have started to gain attention in recent years [1].
The flow transport within insect physiological systems is unsteady because of their body movements andits tracheal wall rhythmic contractions. Several theoretical and numerical attempts taken in the past tryingto model flows in confined domains with moving boundaries that can be used to imitate these physiologi-cal systems. For instance, Uchida and Aoki [24] derived a similarity solution for the unsteady viscous flowin a semi-infinite pipe with either contractions or expansions. Secomb [18] has found a solution for the
Y. Aboelkassem (B)Department of Biomedical Engineering, Yale University, New Haven, CT 06520, USAE-mail: [email protected]
A. E. StaplesDepartment of Engineering Science and Mechanics, Virginia Tech, Blacksburg, VA 24061, USA

Y. Aboelkassem, A. E. Staples
two-dimensional flow field of an incompressible viscous flow in an infinitely long channel with prescribedpulsatile and sinusoidal wall motions. Furthermore, the unsteady squeezing of a viscous fluid from a shrinkingor expanding tube is given analytically in Skalak and Wang [20]. A subsequent article by the same groupusing the same mathematical approach that investigates the squeezing flow problem of a viscous fluid from atube at an arbitrary rate is given by Wang [25]. A more involved and generic approach to study the squeezingflow problem between parallel plates (rectangular or circular) using similarity transformations is given bySingh et al. [19].
The problem of flow induced in confined domains such as tubes or channels due to localized wall contrac-tions is more closely related to the work we present here than the previous examples cited. Several theoretical,experimental, and computational studies have been carried out to model this particular problem. In Pedley andStephanoff [16], the flow along a channel with a time-dependent indentation assigned to one wall is explored. InRalph and Pedley [17], a theoretical analysis of the same system combined with experimental studies is givenfor different values of observed Reynolds and Strouhal numbers. In Mahmood and Merkin [14], a simplifiedanalysis of the flow in a narrow duct with an indentation from one side wall is given. The wall deforma-tion is kept fixed in time, and an explicit expression for the flow stream function at low Reynolds number isderived.
At this point, it should be mentioned that an important distinction between the problems investi-gated in [19–24] and the present work is that in their analysis, the channel walls are forced to squeezetoward the center line with a uniform amplitude, whereas we use prescribed, controllable and indepen-dent localized contractions or indentations at different spots along the channel length to induce the flowmotions and pumps the fluid in a single direction. These contractions are forced to move with differentamplitudes and with or without phase lags with respect to each other, and that will be the focus of thisarticle.
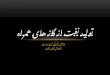
The contraction kinematics have a great impact on the flow transport within many physiological sys-tems. For instance, in a review article by Macagno and Christensen [12], two main types of localized musclecontractions, namely the stationary and progressive (local peristalsis) contractions, are summarized, whereboth types have been observed in the human duodenum. These contractions produce fluid transport in thehuman intestine. An important conclusion from this review article supported by a basic theoretical analysisis that, at least two stationary contractions operating with slightly time lag (phase lag) are needed in order toproduce a net flow. Moreover, the characteristics of the phase lag between the wall contractions have beenfound to affect the laminar mixing in the human intestine [13]. Other examples of physiological systemswith localized wall contractions are given in [22,27]. It has been discovered that in the ground beetle respi-ratory systems, the tracheal tubing network undergoes periodic localized collapses and re-inflations. Thesemotions are known as rhythmic tracheal compressions [27]. The kinematics of these contractions were char-acterized using X-ray synchrotron imaging to visualize the respiratory systems in different ground beetlesspecies [21,26]. To promote the present study, in Fig. 1, we show X-ray image of the tracheal system ofthe carabid beetle. Arrows are given on the top of the figure to indicate rhythmic tracheal compressionslocations.
In general, the internal flow motions inside many of physiological systems are normally driven by wavespropagation of the muscular wall contractions known as peristaltic pumping. Peristalsis-induced flow motionshas been a main research area in classical biological fluid dynamics. There are several theoretical and numericalmethods have been used to study peristalsis-induced flow transport in two-dimensional and three-dimensionalchannels and/or tubes. For instance, Aranda et al. [9] have recently studied the three-dimensional peristalsisin a nonaxisymmetric tube.
In this paper, we present a three-dimensional Stokeslets-meshfree computational model based on the methodof regularized Stokeslets [10] to study the contraction-induced flow pumping of viscous fluid in a three-dimen-sional channel configuration. In particular, we study the flow structures and developments in three-dimensionalchannel with two wall contractions governed by a generic wall profile that allows for contractions to movewith phase(time) lags with respect to each other, which will be given in details in 4.1. The details of the three-dimensional computational approach used in this paper can be found in [7,9–11]. However, a brief versionwill be given in Sect. 3.1.
The present study is a natural extension to our two-dimensional pumping model presented in [1–6], whichrelates the transport of fluid flow within a microgeometry to the contractions found in insect physiological sys-tem [27]. In particular, we present a three-dimensional simulation based on the regularized Stokeslets methodof fundamental solutions to strengthen our bioinspired pumping hypotheses. The three-dimensional resultswere compared with our formal two-dimensional calculations.

A three-dimensional model for flow pumping
Fig. 1 Left: X-ray image of the tracheal system of the carabid beetle, right: schematic has arrows to indicate the locations ofthe rhythmic tracheal compressions. This image is a courtesy of EFRI-2010 research group in Virginia Polytechnic Institute andState University, more details can be found in [1,6]
2 Two-dimensional theoretical analysis
In this section, we briefly summarize and recall our theoretical analysis for the induced flow motions in a2D channel with moving two wall contractions. This analysis has shown to serve as a novel micropumpingparadigm inspired by insect tracheal compressions, Aboelkassem and Staples [2,3].
The 2D pumping model considered an incompressible viscous flow in a channel with a finite length L andwidth W . The channel aspect ratio is defined as 1/δ and is assumed to be very large, i.e., δ = W/L << 1.The flow is at the microscale where viscosity dominates other inertial effects. Therefore, we are dealing witha low Reynolds number flow regime where Re ∈ [0, δ]. This low Re assumption has been justified in thegeneral frame of work of respiration process with lungs [23] or other respiratory systems in general. Thechannel undergoes two moving localized contractions from the upper wall H2(x, t), while the lower wall H1is kept stationary and straight at all times, as shown in Fig. 2. The kinematics and geometry of the contractionsare governed by a generic profile assigned to the channel upper side H2(x, t), which will be prescribed indetail in the result section. The wall profile allowing each contraction to move independently along the lateraldirection with or without a phase lag θ12 with respect to each other. A zero pressure drop,�p = 0, has assumedalong the channel length. The velocity field, pressure gradient, and net flow rate induced by these cyclic wallmovement protocols are derived. The main objective of this section is to reintroduce our previously derivedanalysis for the 2D pumping model, which will serve herein as baseline solution for comparisons with the 3DStokeslets-meshfree computations. The key equations that govern the induced flow field by wall contractions
are the velocity stream function ψ such that(
u = ∂ψ∂y , v = − ∂ψ
∂x
), the pressure gradient ∂p
∂x , and the flow
rate Q as a function of the wall profile H2(x, t) are given below, respectively. It should be noted that all theequations are in nondimensional format as given by Aboelkassem and Staples [2]:

Y. Aboelkassem, A. E. Staples
x1 d1
d2
L >> w
W
g2(t) g1(t)
(a) (b)
(c)
H1
H2 (x, t)
x2
(d)
xi
Xi+di
g2(t)
g1(t)
W
L>>W
y
xz
f
s
x
x
θ12
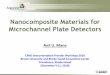
Fig. 2 Problem schematics and setup: a three-dimensional rendering of the tracheal system in the thorax of a real insect [21].b g1(t) and g2(t), the motion protocols assigned to the first and second contractions, respectively. c Schematic of a single trachealshape represented by a 2D channel with moving upper wall contraction profile H2(x, t) and stationary lower wall profile H1(x).d The 3D Stokeslets-meshfree numerical method setup, which consists of a distribution of sources (Stokeslets), field points, andthe relevant boundary conditions
ψ(x, y, t) = 1
12
∂p
∂x
(2y3 − 3(H1 + H2)y
2 + 6H1 H2 y + H31 − 3H2 H2
1
), (1)
∂p
∂x= 1
(H2(x, t)− H1)3
⎛⎝G(t)+ 12
x∫
0
∂H2(s, t)
∂tds
⎞⎠, (2)
where G(t) is the function of integration, which depends only on time, and can be evaluated from the pressureboundary conditions.

A three-dimensional model for flow pumping
Q(x, t) =H2(x,t)∫
H1
u(x, y, t)dy = −1
12
∂p
∂x(H2(x, t)− H1)
3 . (3)
The above equation can be integrated over a complete contraction–expansion cycle of time to calculate the netflow rate. Moreover, it should be noted that the presented analysis is general, and once the upper wall profileH2(x, t) is prescribed, the induced flow motions can be fully calculated [2]. The results based on this analysiswill serve as a baseline case for validation and comparisons with the three-dimensional Stokeslets-meshfreecalculations, which will be given next.
3 Three-dimensional simulations using Stokeslets-meshfree method
The three-dimensional Stokeslets-meshfree method is used here to solve the induced flow motions in a 3Dchannel with a square cross-section and subjected to two moving wall contractions from the upper side. Thepresent 3D numerical results will be used for comparing and validating our 2D theoretical pumping modelderived previously in Aboelkassem and Staples [2] and as summarized in the previous Sect. 2. In other words,the main goal in this section is to use the 3D Stokeslets-meshfree simulations to study the three-dimensionalityeffects on the time-averaged net flow rate when it compared with the 2D counterpart.
3.1 Three-dimensional Stokeslets-MFS method
In this section, we present the method of regularized Stokeslet derived by [7,9–11] based on fundamentaland exact solutions of the Stokes equations for external body forces. These forces are represented by smoothlocalized elements satisfying the Stokes incompressible flow equations
∇∗ · V∗ = 0, (4)
μ�∗ V∗ = ∇∗ p∗ − F∗, (5)
where μ is the fluid viscosity, p∗ is the pressure, V∗ is the velocity, and F∗ is the force per unit volume, whichcan be written in terms of Green’s function and cutoff (regularization) expression as follows:
F∗ = −α∗φ∗ (x∗ − x∗
0
), (6)
where φ∗ (x∗ − x∗
0
)is a cutoff function with a property that
∫φ∗ (x∗) dx = 1. In our computations, we use a
specific cutoff function that is given by Aranda et al. [9],
φ∗ (x∗ − x∗
0
) = 15ε∗4
8π(r∗2 + ε∗2
)7/2 , (7)
where r∗ =‖ x∗−x∗0 ‖. ε∗ is a small regularization parameter that controls the spreading of the cutoff function.
The velocity and pressure solution to the above governing equations can be given as
V ∗i
(x∗) = 1
8πμSi j
(x∗ − x∗
0
)α∗
j , (8)
p∗ (x∗) = 1
8πPj
(x∗ − x∗
0
)α∗
j . (9)
Here and throughout this paper, the indices i, j = 1, 2, 3 follow the Einstein’s summation convention. Also,V ∗
i = (w∗, v∗, u∗) refers to the flow velocity vector and p∗ is the static pressure. x∗i = (z∗, y∗, x∗) is the
position vector. α∗ = (α∗z , α
∗y, α
∗x ) is the force vector strength along z∗, y∗, x∗ directions. Si j is known as a
regularized Stokeslet, and Pj is the stress tensor, where both can be given as
Si j = δi j A∗1 +
(x∗
i − x∗0i
) (x∗
j − x∗0 j
)
A∗2
, (10)
Pj =(
x∗j − x∗
0 j)
A∗3, (11)

Y. Aboelkassem, A. E. Staples
where A∗1 =
(r∗2+2ε2
)
(r∗2+ε2)3/2 , A∗
2 =(
r∗2 + ε2)3/2
and A∗3 =
(2r∗2+5ε2
)
(r∗2+ε2)5/2 . For clarity, the velocity expression using
the above equations can be easily rewritten as follows:
u∗ = α∗x
8πμA∗2
(A∗
1
A∗2
+ (x∗ − x∗
0
)2)
+ α∗y
8πμA∗2
(x∗ − x∗
0
) (y∗ − y∗
0
)
+ α∗z
8πμA∗2
(x∗ − x∗
0
) (z∗ − z∗
0
), (12)
v∗ = α∗x
8πμA∗2
(x∗ − x∗
0
) (y∗ − y∗
0
) + α∗y
8πμA∗2
(A∗
1
A∗2
+ (y∗ − y∗
0
)2)
+ α∗z
8πμA∗2
(y∗ − y∗
0
) (z∗ − z∗
0
), (13)
w∗ = α∗x
8πμA∗2
(x∗ − x∗
0
) (z∗ − z∗
0
) + α∗y
8πμA∗2
(y∗ − y∗
0
) (z∗ − z∗
0
)
+ α∗z
8πμA∗2
(A∗
1
A∗2
+ (z∗ − z∗
0
)2). (14)
Similarly, the pressure is given as:
p∗ = A∗3
8π
[α∗
x
(x∗ − x∗
0
) + α∗y
(y∗ − y∗
0
) + α∗z
(z∗ − z∗
0
)]. (15)
Now, if we use the same nondimensional parameters as defined previously in Aboelkassem and Staples [2],x = x∗/L , y = y∗/W, z = z∗/W, r = r∗/L , δ = W/L , where W is the channel width and depth. Also,let u = u∗
x/uo, v = v∗r /δuo, w = w∗
x/δuo, p = p∗W 2/(μuo L), αz = α∗z /(μuo), αy = α∗
y/(μuo), αx =α∗
x/(μuo), A1 = A∗1/L , A2 = A∗
2/L , A3 = A∗3/L , ε = ε∗/L . The above velocity expressions and pressure
can be re-written in a nondimensional form as:
u = αx
8πδA2
(A1
A2+ δ2 (x − x0)
2)
+ αyδ
8π A2(x − x0) (y − y0)+ αz
8π A2(x − x0) (z − z0), (16)
v = αxδ
8π A2(x − x0) (y − y0)+ αy
8πδA2
(A1
A2+ δ2 (y − y0)
2)
+ αz
8π A2(y − y0) (z − z0), (17)
w = αxδ
8π A2(x − x0) (z − z0)+ αyδ
8π A2(y − y0) (z − z0)+ αz
8π A2
(A1
A2+ (z − z0)
2). (18)
Similarly, the nondimensional pressure is given by
p = A3δ2
8π
[δαx (x − x0)+ δαy (y − y0)+ αz (z − z0)
], (19)
where A1 =(r2+2ε2
)
(r2+ε2)3/2 , A2 = (
r2 + ε2)3/2
, A3 =(2r2+5ε2
)
(r2+ε2)5/2 , and r =
√δ2 (x−x0)
2+δ2 (y−y0)2+(z−z0)
2.
4 Results and discussions
In the MFS-Stokeslets-meshfree technique, the total solution is formed by the superposition of all the basesrepresented by the Stokeslets expressions with unknown intensities as shown above. The strength of the Stokes-lets singularities is then obtained by enforcing and satisfies the prescribed boundary conditions using directcollocations [29] and [10]. For the problem under consideration, a distribution of N Stokeslets (regularizedsource points) with unknown strengths α along the channel boundaries which is shown in Fig. 2. As a result of

A three-dimensional model for flow pumping
those distributed point forces, the induced flow field can be then approximated by applying the superpositionprinciple and taking the effect from all the Stokeslets points, the velocity field can be then evaluated as
u (xi , yi , zi ) =N∑
j=1
[αx j
8πδA2 j
(A1 j
A2 j+ δ2 (
xi − x0 j)2
)+ αy jδ
8π A2 j
(xi − x0 j
) (yi − y0 j
)
+ αz j
8π A2 j
(xi − x0 j
) (zi − z0 j
)], (20)
v (xi , yi , zi ) =N∑
j=1
[αx jδ
8π A2 j
(xi − x0 j
) (yi − y0 j
) + αy j
8πδA2 j
(A1 j
A2 j+ δ2 (
yi − y0 j)2
)
+ αz j
8π A2 j
(yi − y0 j
) (zi − z0 j
)], (21)
w (xi , yi , zi ) =N∑
j=1
[αx jδ
8π A2 j
(xi − x0 j
) (zi − z0 j
) + αy jδ
8π A2 j
(yi − y0 j
) (zi − z0 j
)
+ αz j
8π A2 j
(A1 j
A2 j+ (
zi − z0 j)2
)]. (22)
Similarly, the pressure is given by
p (xi , yi , zi ) =N∑
j=1
A3 jδ2
8π
[δαx j
(xi − x0 j
) + δαy j(yi − y0 j
) + αz j(zi − z0 j
)], (23)
where A1 j =(
r2i j +2ε2
)(
r2i j +ε2
)3/2 , A2 j =(
r2i j +ε2
)3/2, A3 j =
(2r2
i j +5ε2)
(r2
i j +ε2)5/2 , and ri j =
√δ2
(xi −x0 j
)2+δ2(yi −y0 j
)2+(zi −z0 j
)2,
and αx j , αy j , and αz j are the unknown force coefficients that represent the strengths of the Stokeslets in x, yand z-directions, respectively. xi = (xi , yi , zi ) is the position of any field point. x0 j = (x0 j , y0 j , z0 j ) is thelocation of the Stokeslets source points. ri j = |xi − x0 j | is the distance between any field point and anothersource point. ε is the Stokeslets regularization parameter.
In order to determine the unknown force (Stokeslets) strengths α = (αx j , αy j , αz j ), the boundary condi-tions for the velocity components and pressure are imposed and collocated at the boundary field points on thechannel boundary as shown in Fig. 2. Adding each fundamental solution to the Stokes equations (20)–(23),the final induced solution can be obtained by solving the resulting system of equations
Aα = b, (24)
where A is a matrix of size 3N x3N with real entries formed by evaluating the right-hand side of the aboveexpressions in Eqs. (20)–(23). b is a vector of size 1x3N of real entries formed by evaluating the left-handsides of the same equations. In other words, all the entries in both A and b are determined by enforcing thefundamental solutions to satisfy the boundary conditions by direct collocation. α represents the Stokesletsforce intensities, which to be determined by solving the above system of equations.
It should be mentioned here that although the MFS is relatively easy to implement and does not requireany grids, it suffers from ill-conditioning matrix issue associated with finding the force strengths [8,10,28,29].This linear algebra drawback can lead to inaccurate Stokeslets strengths and, consequently, inaccuracies in theinduced flow field.
A solution to the above matrix problem has found by either collocating the Stokeslets sources at a distanceaway from the domain boundaries as given in Young et al. [29] or using regularized Stokeslets expressions asderived by Cortez [10] or recently by regularization to the matrix A itself by Aboelkassem and Staples [2],where an easy and fast converging algorithm is given. In this study, we follow the algorithm by Aboelkassemand Staples [2] to solve for the Stokeslets strengths and to reconstruct the induced flow field in a 3D channelsubjected to two moving wall contractions that move according to specific wall profile, which is given indetails in the next Sect. 4.1. More details about implementing the Stokeslets-meshfree method can be foundin Aboelkassem and Staples [2,5].

Y. Aboelkassem, A. E. Staples
The result section is organized as follows: firstly, the wall profile is prescribed in full. The algorithmwhich will be used to overcome the ill-conditioned linear algebra issue during the calculation of the Stokesletsstrengths will be given secondly. Thirdly, the structure and the development of the flow field induced by onlytwo wall contractions that move with zero and nonzero phase lags are given. Finally, the net flow rate andpumping effect will be given separately in Sect. 5. All the presented results are compared with 2D theoreticalsolution for validation purposes. The details of the result subsections are given below.
4.1 Wall profile, H2(x, t)
Let the mathematical model that describes the kinematics and the shape of the contractions from the channelupper wall be given as
H2(x, t) = 1
2+
Nc∑i=1
Ai fi (x)gi (t), (25)
where fi (x) ∈ Cr [0, 1] and gi (t) ∈ Cr [0, T = 1/St ] represent the spatial and the temporal distribution of theupper wall shape, respectively. Nc defines the number of contractions, and Ai is the amplitude assigned to eachcontraction. The spatial form of the above equation imitates the geometry of the upper wall contractions as
fi (x) = tanh(α(x − xi ))− tanh(α(x − (xi + di ))), (26)
where α = 2π/δ, xi defines the beginning of each collapse region and di ∈ (0, 1 − xi ] marks its end, as shownin Fig. 2b. In this work, we only consider two contractions, i.e., Nc = 2 where the first contraction moves intime according to the profile
g1(t) ={
12 (1 − cos(2πβSt t)) 0 ≤ t ≤ 1/βSt ,
0 1/βSt < t ≤ 1/St ,(27)
while the second contraction moves according to
g2(t) = 1
2(1 − cos(2π St t)) 0 ≤ t ≤ 1/St , (28)
where the nondimensional parameter β is related to the phase lag between the first and the second contractions.Initially, during the compression phase, we let both contractions begin to move together. Then, however, welet the first contraction reach the maximum specified channel travel collapse (TC) distance earlier than thesecond contraction. In other words, there will be a time lag, Tg = (1−1/β)/(2St ), between these two collapsemotions which is equivalent to a phase lag θ12 = π(1 − 1/β). Moreover, during the expansion phase, the firstcontraction returns back to the nominal-original position and continues its period with zero amplitude until thesecond contraction completes its own cycle, and then, both contractions start the second cycle together withthe protocol shown in Fig. 2b. It should be noted that both contractions have same time period T = 1/St , i.e.,St = 1, and that is, if β = 1, there will be no phase lag and both contractions will move in the same manner intime. Here, we used x1 = 0.25, x2 = 0.65, d1 = d2 = 0.1, A1 = A2 = −0.3528, which render the maximumtube collapse ratio to be T C = 70 %.
This motion protocol has chosen to guarantee that after one cycle, the channel geometry will be returningto the initial position and there will be no net flow due to any volume deformation. This channel wall profileH2(x, t) plays an important role in breaking the flow symmetry and inducing unidirectional net flow.
4.2 Algorithm for finding accurate Stokeslets strengths
Finding an accurate solution to the ill-conditioned system given in Eq. (24) is the step that requires themost care when implementing the regularized Stokeslets-meshfree computations with a regularized parameterε = 0.15 and total number of source points of N = 128X64X64, which have been found to be enoughto resolve the flow condition. In other words, a total number of N = 219 Stokeslets is obtained by find-ing an (N -independent) solution, which indeed satisfies the wall boundary conditions. In this section, we

A three-dimensional model for flow pumping
Table 1 Algorithm for solving ill-conditioned systems of equations
Algorithm for finding the strengths of each Stokeslet-source point
Input : A, I ∈ M3NX3N(R), b ∈ R3N , h, tol ∈ R1. α(0) = 0, r(0) = b − f (0) = b2. Do while ‖ r ‖∞≥ tol3. AR = A∗A + h2I
4. α(k) = α(k−1) + AR−1
A∗r(k−1)
5. r(k) = b − Aα(k)
end DoOutput: Stokeslets strengths: α = [αx jαy jαz j ]T , j = 1 : 3N
present a numerical algorithm based on Tikhonov-regularization as given in Neumaier [15] to solve ill-conditioned linear systems of equations. The algorithm is based on introducing a regularization parameter,h = 0.01, into the original matrix, A, which is then transformed into a modified symmetric matrix, AR.This modified matrix acts as a preconditioner and leads to a modified system of equations with enhancedcondition number. The precondition matrix effectively changes the eigenvalues of the original matrix, A,to modified ones. These modified eigenvalues are clustered away from zero and consequently lead to abetter conditioned matrix. The algorithm is simple and only requires to have in hand, the matrix of coef-ficients, A, the vector, b, the regularization parameter, h = 0.01, and the convergence criteria based on anassigned specific tolerance value, tol = 10−6. The detailed steps of the algorithm are listed in 1. It shouldbe noted that this algorithm is general, and the preconditioned matrix given in Step 3 is the most criti-cal part of the algorithm. That is because its choice can affect the maximum number of iterations requiredfor the residual to convergence within a prescribed tolerance. One way to verify the accuracy of the abovealgorithm shown in Table 1 is to use the output force strengths, α, to recalculate the velocities and pres-sure at all boundary points to ensure that the boundary conditions are satisfied to the prescribed degree ofaccuracy.
As a direct implementation of the above algorithm, we will show the results for both velocity field andpressure induced by channel’s wall motions and compare them with the 2D analysis. More specifically, twocases will be considered, where the wall collapses move with phase lags θ12 = 0 and 30◦, and are probed atonly two snapshots in time, namely compression time t = t/4 and expansion time t = 3T/4.
4.3 Three-dimensional channel with two moving contractions
The method of fundamental solutions (MFS) along with the regularized Stokeslets approach by Cortez [10]will be used here to solve for the flow field in a three-dimensional channel induced by two moving wall contrac-tions. These contractions are attached to the top wall only and are set to move according to the protocol profileas given previously in Sect. 4.1. A schematic figure that shows the problem setting along with the distributionsof Stokeslets source points is given in Fig. 2. The motion protocol used in actuating the wall contractions isgiven in Fig. 2b.
The goal of this section is to perform 3D simulations and compare the flow field with our previously derived2D analytical channel model in Sect. 2, and furthermore calculate the net flow induced by the 3D simulationsand compare it with the 2D counter part. In other words, results from both the 3D Stokeslets-meshfree compu-tations and the 2D theoretical model are compared at different snapshot times. The comparison process will begiven at two snapshots of times t = T/4, 3T/4 that represent compression and expansion collapsing phases.Moreover, two distinct phase lags θ12 = 0 and 30◦ are used in the comparison process. In other words, twomain cases are used for situations where the wall contractions are set to move with phase lags θ12 = 0 and30◦, respectively. A detailed comparison between results computed by the 2D analytical model and by the 3Dmeshfree computations is given at the same geometric and flow conditions. The details of the results for bothcases are given in the following subsections.
4.4 Two moving contractions with θ12 = 0◦
Once the strengths of the Stokeslets points are calculated, the MFS can be then applied to reconstruct theinduced flow. The structure and development of the flow field induced by wall contractions during cyclic

Y. Aboelkassem, A. E. Staples
Fig. 3 Axial velocity contour lines: a–b 3D Stokeslets-meshfree computations, c–d derived 2D theoretical solution. Resultsare given for wall contractions with phase lag θ12 = 0◦ and δ = 0.1 during compression time t = T/4 and expansion time att = 3T/4. a 3D computations at t = T/4, θ12 = 0◦. b 3D computations at t = 3T/4, θ12 = 0◦. c 2D theory at t = T/4, θ12 = 0◦.d 2D theory at t = 3T/4, θ12 = 0◦
compression and expansion motions are calculated. Results obtained by using the 3D Stokeslets-meshfreecomputations are compared with the 2D analytical counterpart. For instance, in Fig. 3, we show a comparisonbetween the axial velocity contour lines obtained numerically and analytical when wall contractions are setto move with a zero phase lag θ12 = 0◦. Contour lines obtained numerically for the u-velocity component aregiven at different planes during the compression and expansion snapshot times t = T/4 and 3T/4 as shownin Fig. 3a, b, respectively. The contour lines computed based on the 2D analytical model at the same times areshown in Fig. 3c, d, respectively.
Results have shown that, as the upper wall contractions undergo the compression phase and start to movetoward the bottom wall, the axial velocity component increases near the contraction regions and the flow isdisplaced, bifurcated, and exit the channel from both directions. Since each collapse sends flow to both direc-tions away from the contraction zone, there will be a stagnation region between the two contractions due tothe flow cancellations. A reasonably good agreement has observed between the axial velocity contour linesobtained numerically and theoretically.
A comparison between the pressure contours obtained numerically as shown in Fig. 4a, b and the analyticalcounterpart as shown in Fig. 4c, d for a scenario where wall contractions are set to move with a zero phaselag θ12 = 0◦. The contour lines are given at similar compression and expansion snapshot times as before.For example, results at compression time t = T/4 show that, as the wall contractions start to move towardthe bottom wall, high pressure with adverse and favorable gradients is formed in the neighborhood of thecontraction regions. This pushes the flow away from the compression sites and forces the flow to exit thechannel from both ends. This flow bifurcation is clear as pointed out using the velocity contours. Moreover,the pressure attains its maximum or total value in the stagnation zone between the two contractions. Similarly,data for pressure contours during the expansion phase at time t = 3T/4 are given. As expected, when thecontraction regions expand back away from the bottom wall, an exactly similar contour lines and streamlinesare developed but with opposite signs when compared with data at compression time t = T/4. Results haveshown that, unlike the vertical velocity, the pressure contours obtained numerically have very good agreementswith the 2D analytical counterpart.

A three-dimensional model for flow pumping
Fig. 4 Pressure contour lines: a–b 3D Stokeslets-meshfree computations, c–d derived 2D theoretical solution. Results are givenfor wall contractions with phase lag θ12 = 0◦ and δ = 0.1 during compression time t = T/4 and expansion time at t = 3T/4.a 3D computations at t = T/4, θ12 = 0◦. b 3D computations at t = 3T/4, θ12 = 0◦. c 2D theory at t = T/4, θ12 = 0◦. d 2Dtheory at t = 3T/4, θ12 = 0◦
4.5 Two moving contractions with θ12 = 30◦
In addition to results presented from the previous case study, where the two contractions move with no phaselag θ12 = 0◦, we also show similar plots for velocity and pressure contours at a situation where the wallcontractions are set to move with a nonzero phase lag, i.e., θ12 = 30◦. Results obtained by using the 3DStokeslets-meshfree computational method and by the 2D analytical model are compared at similar snapshottimes that represent both compression t = T/4 and expansion t = 4T/4 phases.
For instance, contour lines for the static pressure are shown in Fig. 6 at both compression and expansiontimes as well. Results have shown that unlike the situation where θ12 = 0◦ which is always characterized byhaving a stagnation zone of zero velocities between the two contractions, the flow is not allowed to transport.When θ12 = 30◦, that stagnation zone is relaxed, and there will be flow transport within the region betweenthe two contractions. This flow motion between the contraction regions is clearly shown by the axial velocitycontour lines calculated analytically and numerically as given in Fig. 5. Moreover, there is a pressure gradientin the region between the two contractions, which indicate that there is a flow transport in this region as shownin Fig. 6.
Based on results demonstrated in the previous sections, the presented pumping mechanism can be inter-preted as follows: An inelastic channel with at least two contracting spots can produce unidirectional flow andworking as pumping mechanism. The physical insight into this pumping model can be explained as follows:when the first constriction starts to increase with time while the second constriction is slight, the resulting flowis distributed almost equally up- and downstream. Now, if the second constriction becomes large, then the flowresistance on the downstream side is larger during the decreasing phase of the first constriction, so less flow isdrawn back upstream. Therefore, a unidirectional flow with net flow transport is produced.
Finally, the effect of the phase lag parameter θ12 on the instantaneous and time-averaged volumetricflow rate is investigated and will be given in Sect. 5, where the time-averaged volumetric flow rate over a

Y. Aboelkassem, A. E. Staples
Fig. 5 Axial velocity contour lines: a–b 3D Stokeslets-meshfree computations, c–d Derived 2D theoretical solution. Resultsare given for wall contractions with phase lag θ12 = 30◦ and δ = 0.1 during compression time t = T/4 and expansion timeat t = 3T/4. a 3D Computations at t = T/4, θ12 = 30◦. b 3D Computations at t = 3T/4, θ12 = 30◦. c 2D Theory att = T/4, θ12 = 30◦. d 2D Theory at t = 3T/4, θ12 = 30◦
complete contraction–expansion cycle for various phase lag values is studied and compared with 2D resultsto explore which contraction setting can be used to produce maximum unidirectional net flows out of thissystem.
5 Computing the net flow rate
Based on the 3D Stokeslets-meshfree velocity field presented in the previous sections for channel with mov-ing two wall contractions, we calculate the time-averaged net flow rate QT as a function of the contractionmovements phase lag θ12 parameter in this part. The goal is to compare the computed time-averaged net flowbased on the 3D results with the time-averaged net flow computed based on our 2D theoretical analysis givenin Sect. 2. In order to calculate the time-averaged net flow rate, we first have to calculate the instantaneous netflow rate at desired areas along the axial directions. The details of calculating the time-averaged net flow ratecan be also found in Aranda et al. [9], which can be re-given as follows:
q(x, t) =∫
A(x,t)
Q(x, y, z, t)dydz, (29)
where A(x, t) is the cross-sectional area along the channel length x and time t . The above integration isapproximated numerically using the standard trapezoidal rule. Once we have computed the instantaneous flowrate q(x, t), we may average it over one period of time T = 1/St or we may find the averaged flow rate perunit length. The time-averaged net flow rate is simply computed by averaging computed values at discretetimes since the flow rate is a periodic function in time. The time-averaged net flow rate per unit length of thechannel is computed by

A three-dimensional model for flow pumping
Fig. 6 Pressure contour lines: a–b 3D Stokeslets-meshfree computations, c–d derived 2D theoretical solution. Results are givenfor wall contractions with phase lag θ12 = 30◦ and δ = 0.1 during compression time t = T/4 and expansion time at t = 3T/4.a 3D Computations at t = T/4, θ12 = 30◦. b 3D Computations at t = 3T/4, θ12 = 30◦. c 2D Theory at t = T/4, θ12 = 30◦.d 2D Theory at t = 3T/4, θ12 = 30◦
QT (x) = 1
T
T∫
0
q(x, t)dt, (30)
where T = 1/St is the time period. In the discrete form, the time-averaged net flow rate can be computedusing the quadrature trapezoidal rule,
QT (x) ≈ 1
T
n�t∑0
q(x, n�t)�t, (31)
where �t = T/NT , NT is the number of quadrature points in a time period T = 1/St .In Fig. 7, we show the time-averaged net flow rate as a function of the phase lag parameter. In the same
figure, results obtained by the 2D analytical solution are compared with the 3D Stokeslets-meshfree computa-tions for the channel pumping model. In Fig. 7, the time-averaged net flow rate as a function of the phase lagparameter is given, where a comparison between the 3D Stokeslets-meshfree channel flow pumping result andthe 2D analytical model derived previously by Aboelkassem and Staples [2] is also shown. Results have shownthat there is no a good agreement between the 3D channel and the 2D channel analytical model. However, the3D channel net flow rate has a similar trend as a function of the phase lag similar to the 2D analytical solutionexcept the fact that the maximum values occur at θ12 = 105◦ rather than θ12 = 65◦, which is predicted bythe 2D analytical model. This phase lag mismatch between the 2D and 3D results might be related to thethree-dimensional effects, where net flow is expected to depend on all spatial dimensions and not only on thex-direction as assumed in the 2D counterpart.
In summary, although the net flow rate distribution as a function of phase lag for both 3D Stokeslets-meshfree computations and 2D analytical results is different. They still share similar physical interpretationsabout the pumping hypotheses which are inspired by the insect respiration process and its rhythmic trachealcollapses.

Y. Aboelkassem, A. E. Staples
θ
Q
0 50 100 1500
0.005
0.01
0.015
0.02
0.025
0.03
12
T
2D-Analytical Channel Model
3D- Meshfree Channel
Fig. 7 Time averaged net flow rate comparisons between the 2D analytical solution and 3D Stokeslets-meshfree computations
6 Conclusions
Inspired by insect respiration processes, a flow pumping model in a three-dimensional (3D) channel subjectedto two rhythmically moving wall contractions is given here. The 3D regularized Stokeslets-meshfree methodis used to compute and reconstruct the flow motions and the time-averaged net flow pumping rate induced bythese wall contractions. The 3D numerical results are compared with our previously derived two-dimensional(2D) analytical pumping model for validation purposes. The comparisons suggest that although the 3D flowfield at different time snapshots seems to be in a good agreement with the 2D analysis, the net flow rate over acomplete cycle shows some significant differences. In particular, the net flow rate distribution as a function ofthe wall motion time (phase) lag parameter for the 3D Stokeslets-meshfree computations and the 2D analyticalmodel is different; however, they still imply the same basic conclusions with regard to the proposed pumpingmechanism.
Although there is not a very good agreement between the 3D numerical simulations and the results fromthe 2D analytical model when comparing time-averaged net flow rates, we observe that the 3D channel netflow rates have a similar trend as a function of the phase lag as the 2D analytical solution, except for the factthat the maximum value occurs at θ12 = 105◦ rather than at θ12 = 65◦, as is predicted by the 2D analyticalmodel. In spite of the observed differences in the flow field and net flow between the 3D simulations and the 2Dmodel, the main conclusions and results of the present simulations as well as of our previous 2D analysis arethat at least two collapse sites that move with a time lag with respect to one another in an inelastic channel arerequired to produce a unidirectional flow. Furthermore, there is an optimal phase difference in actuation timesat these two sites that produces a maximum flow rate. This optimal value in a 2D geometry will be differentthan in its 3D counterpart.
Acknowledgments This work is supported by the National Science Foundation Emerging Frontiers in Research and Innovationsprogram under Grant No. 0938047 and the Virginia Tech Institute for Critical Technology and Applied Science (ICTAS).
References
1. Aboelkassem, Y.: Novel Bioinspired Pumping Models for Microscale Flow Transport. PhD. Dissertation, Virginia Tech(2012)
2. Aboelkassem, Y., Staples, A.E.: Flow transport in a microchannel induced by moving wall contractions: a novel micropum-ping mechanism. Acta Mech. 223(3), 463–480 (2012a)
3. Aboelkassem, Y., Staples, A.E.: Stokeslets-meshfree computations and theory for flow in a collapsible microchannel. Theor.Comput. Fluid Dyn. 27(5), 681–700 (2012b). doi:10.1007/s00162-012-0269-7
4. Aboelkassem, Y., Staples, A.E.: A bioinspired pumping model for flow in a microtube with rhythmic wall contractions.J. Fluids Struct. (in press), (2013a). doi:10.1016/j.jfluidstructs.2013.06.003
5. Aboelkassem, Y., Staples, A.E.: Selective pumping in a network: insect-style microscale flow transport. Bioinspir.Biomim. 8, 026004 (2013)

A three-dimensional model for flow pumping
6. Aboelkassem, Y., Staples, A.E., Socha, J.: Microscale flow pumping inspired by rhythmic tracheal compressions ininsects. Proc. ASME Press. Vessel. Piping PVP2011, 57061 (2011)
7. Ainley, J., Durkin, S., Embid, R., Boindala, P., Cortez, R.: The method of images for regularized stokeslets. J. Comput.Phys. 227, 4600–4616 (2008)
8. Alves, C., Silvestre, A.: Density results using stokeslets and a method of fundamental solutions for the stokes equations. Eng.Anal. Boundary Elem. 28, 1245–1252 (2004)
9. Aranda, V., Cortez, R., Fauci, L.: Stokesian peristaltic pumping in a three-dimensional tube with a phase-shift asymme-try. Phys. Fluids 23, 081901 (2011)
10. Cortez, R.: The method of regularized stokeslets. SIAM J. Sci. Comput. 23, 1204–1225 (2001)11. Cortez, R., Fauci, L., Medovikov, A.: The method of regularized stokeslets in three dimensions: analysis, validation, and
applications to helical swimming. Phys. Fluids 17, 031504 (2005)12. Macagno, E., Christensen, J.: Fluid mechanics of the duodenum. Ann. Rev. Fluid Mech. 12, 139–158 (1980)13. Macagno, E., Christensen, J., Lee, L.: Modeling the effect of wall movement on absorption in the intestine. Am. J.
Physiol. 243, G541–G550 (1982)14. Mahmood, T., Merkin, J.: The flow in a narrow duct with an indentation or hump on one wall. Wärme- und Stoffübertra-
gung 22, 69–76 (1990)15. Neumaier, A.: Solving ill-conditioned and singular linear systems: a tutorial on regularization. SIAM Rev. 40, 636–666 (1998)16. Pedley, T., Stephanoff, K.D.: Flow along channel with a time-dependent indentation in one wall: the generation of vorticity
waves. J. Fluid Mech. 160, 337–367 (1985)17. Ralph, M., Pedley, T.J.: Flow in a channel with moving indentation. J. Fluid Mech. 190, 87–112 (1988)18. Secomb, T.: Flow in a channel with pulsating walls. J. Fluid Mech. 88, 273–288 (1978)19. Singh, P., Radhakrishnan, V., Narayan, K.A.: Squeezing flow between parallel plates. Ingenieur-Archiv 60, 274–281 (1990)20. Skalak, F., Wang, C.Y.: On the unsteady squeezing of a viscous fluid from a tube. J. Aust. Math. Soc. 21(Series B),
65–74 (1978)21. Socha, J.J., Förster, T., Greenlee, K.: Issues of convection in insects respiration: insights from synchrotron X-ray imaging
and beyond. Respir. Physiol. Neurobiol. 173, S65–S73 (2010)22. Socha, J.J., Lee, W.-K., Harrison, J.F., Waters, J.S., Fezzaa, K., Westneat, M.W.: Correlated patterns of tracheal compression
and convective gas exchange in a carabid beetle. J. Exp. Biol. 211, 3409–3420 (2008)23. Tsuda, A., Rogers, R.A., H, P.E., Butler, J.P.: Chaotic mixing deep in the lung. PNAS 99(15), 10173–10178 (2002)24. Uchida, S., Aoki, H.: Unsteady flows in a semi-infinite contracting or expanding pipe. J. Fluid Mech. 82, 371–387 (1977)25. Wang, C.Y.: Arbitrary squeezing of fluid from a tube at low squeeze numbers. J. Appl. Math. Phys. (ZAMP) 31,
620–627 (1980)26. Westneat, M.W., Socha, J., Lee, W.-K.: Advances in biological structure, function and physiology using synchrotron X-ray
imaging. Ann. Rev. Physiol. 70, 119–142 (2008)27. Westneat, M.W., Betz, O., Blob, R.W., Fezzaa, K., Cooper, W.J., Lee, W.-K.: Tracheal respiration in insects visualized with
synchrotron X-ray imaging. Science 299, 558–560 (2003)28. Young, D.L., Chen, C., Fan, C.M., Murugesan, K., Tsai, C.C.: The method of fundamental solutions for stokes flow in a
rectangular cavity with cylinders. J. Mech. B-Fluids 24, 703–716 (2005)29. Young, D.L., Jane, S.J., Fan, C.M., Murugesan, K., Tsai, C.C.: The method of fundamental solutions for 2d and 3d stokes
problems. J. Comput. Phys. 211, 1–8 (2006)