Embed Size (px)
Citation preview

NASA/CR-1999-208991
A Systematic Methodology for Verifying
Superscalar Microprocessors
Mandayam Srivas
SRI International, Menlo Park, CA
Ravi Hosabettu & Ganesh Gopalakrishnan
University of Utah, Salt Lake City, UT
February 1999
https://ntrs.nasa.gov/search.jsp?R=19990018275 2020-04-02T08:25:39+00:00Z

The NASA STI Program Office ... in Profile
Since its founding, NASA has been dedicated tothe advancement of aeronautics and spacescience. The NASA Scientific and Technical
Information (STI) Program Office plays a keypart in helping NASA maintain this importantrole.
The NASA STI Program Office is operated byLangley Research Center, the lead center forNASA's scientific and technical information. The
NASA STI Program Office provides access to theNASA STI Database, the largest collection ofaeronautical and space science STI in the world.The Program Office is also NASA's institutionalmechanism for disseminating the results of itsresearch and development activities. Theseresults are published by NASA in the NASA STIReport Series, which includes the followingreport types:
TECHNICAL PUBLICATION. Reports ofcompleted research or a major significantphase of research that present the results ofNASA programs and include extensivedata or theoretical analysis. Includescompilations of significant scientific andtechnical data and information deemed to
be of continuing reference value. NASAcounterpart of peer-reviewed formalprofessional papers, but having lessstringent limitations on manuscript lengthand extent of graphic presentations.
TECHNICAL MEMORANDUM. Scientific
and technical findings that are preliminaryor of specialized interest, e.g., quick releasereports, working papers, andbibliographies that contain minimalannotation. Does not contain extensive
analysis.
CONTRACTOR REPORT. Scientific and
technical findings by NASA-sponsoredcontractors and grantees.
CONFERENCE PUBLICATION. Collected
papers from scientific and technicalconferences, symposia, seminars, or othermeetings sponsored or co-sponsored byNASA.
SPECIAL PUBLICATION. Scientific,technical, or historical information from
NASA programs, projects, and missions,often concerned with subjects havingsubstantial public interest.
TECHNICAL TRANSLATION. English-language translations of foreign scientificand technical material pertinent to NASA'smission.
Specialized services that complement the STIProgram Office's diverse offerings includecreating custom thesauri, building customizeddatabases, organizing and publishing researchresults ... even providing videos.
For more information about the NASA STI
Program Office, see the following:
• Access the NASA STI Program Home Pageat http'//www.sti.nasa.gov
• E-mail your question via the Internet [email protected]
• Fax your question to the NASA STI HelpDesk at (301) 621-0134
• Phone the NASA STI Help Desk at(301) 621-0390
Write to:
NASA STI Help DeskNASA Center for AeroSpace Information7121 Standard DriveHanover, MD 21076-1320

NASA/CR-1999-208991
A Systematic Methodology for Verifying
Superscalar Microprocessors
Mandayam Srivas
SRI International, Menlo Park, CA
Ravi Hosabettu & Ganesh Gopalakrishnan
University of Utah, Salt Lake City, UT
National Aeronautics and
Space Administration
Langley Research CenterHampton, Virginia 23681-2199
Prepared for Langley Research Centerunder Contract NAS1-20334
February 1999

Available from:
NASA Center for AeroSpace Information (CASI)7121 Standard Drive
Hanover, MD 21076-1320
(301) 621-0390
National Technical Information Service (NTIS)5285 Port Royal Road
Springfield, VA 22161-2171(703) 605-6000

Abstract
We present a systematic approach to decompose and incrementally build
the proof of correctness of pipelined microprocessors. The central idea is to
construct the abstraction function by using completion functions, one per
unfinished instruction, each of which specifies the effect (on the observables)
of completing the instruction. In addition to avoiding the term size and case
explosion problem that limits the pure flushing approach, our method helps
localize errors, and also handles stages with iterative loops. The technique
is illustrated on pipelined and superscalar pipelined implementations of a
subset of the DLX architecture. It has also been applied to a processor without-of-order execution.
111

Contents
1
2
3
Introduction 1
The Completion Functions Approach 5
2.1 Pipelined Microprocessor Correctness Criteria ......... 5
2.2 The Completion Functions Approach .............. 7
Application of Our Methodology 11
3.1 Application to the DLX Processor ............... 11
3.1.1 Completion Functions and Constructing the Abstrac-tion Function ....................... 13
3.1.2 The Decomposition of the Proof ............ 153.1.3 The Proof Details .................... 17
3.2 Application to Superscalar DLX Processor ........... 20
3.2.1 Completion Functions and the Abstraction Function . 21
3.3 Application to Out-of-order Execution ............. 22
3.3.1 Constructing the Abstraction Function ......... 233.3.2 Proof Details ....................... 24
3.3.3 Comparison with the MAETT Approach ....... 25
3.4 Hybrid Approach to Reduce the Manual Effort ........ 25
4 Conclusions 27
v

List of Figures
2.1 Pipelined microprocessor correctness criteria .......... 6
2.2 A simple four-stage pipeline and decomposition of the proof
under completion functions ................... 8
3.1 Pipelined implementation .................... 12
3.2 The decomposition of the commutative diagram for regfile 16
3.3 The issue logic in the superscalar DLX processor ....... 20
3.4 The processor with out-of-order execution (example used in
[SH97]) .............................. 23
vi

Chapter 1
Introduction
In the past few years, research advance in hardware verification has resulted
in the successful verifications of several large and real hardware designs.
The verification [SM95] using PVS [ORSvH95] of Rockwell International's
AAMP5 and AAMP-FV microprocessors, which was sponsored by NASA's
Langley Research Laboratory, was one example of such an effort. While such
verification efforts have certainly increased the awareness of the value of for-
mal verification within the hardware design industry, the technology is still
far from being successfully and completely transitioned to industry. As the
AAMP verification projects demonstrated, the main obstacles to technology
transition, especially in microprocessor verification, are the following:
1. Lack of efficient capabilities for symbolic simulation (with uninter-
preted functions) of hardware designs and automatic decision proce-
dures for the most commonly used data types in hardware designs,such as bit-vectors.
2. Lack of suitable verification methodologies that are applicable to the
kind of challenging architectures, such as superscalar pipelines, out-
of-order execution, etc., employed by modern microprocessors.
Support for efficient symbolic simulation is crucial because symbolicsimulation is at the core of most of the methods based on commutative
diagram correspondence checking used in verifying microprocessor designs
at the register-transfer level. Although there exist systems, such as ACL2
[KM96], that support faster symbolic simulation than the current public
version of PVS, efficient symbolic simulation alone is not sufficient for scal-
ing up verification to state-of-the-art microprocessors, such as the Pentium

2 Chapter 1. Introduction
processor. We also need a verification methodology, i.e., appropriate ab-
straction/refinement techniques and re-usable proof strategies, to setup the
overall verification and decompose the complex verification problem into
properties that can be automatically verified by symbolic simulation and
decision procedures. Under the sponsorship of NASA's Langley Research
center, SRI has been working on developing solutions to the above obstacles
in scaling up formal verification of microprocessors. This document reports
the result of the second task of developing a systematic methodology for
verifying microprocessors that employ advanced design features, such as su-
perscalar pipelining, speculative execution, and out-of-order execution to
enhance their throughput. Under a separate NASA task, we are enhancing
the efficiency and automation capabilities of symbolic simulation in PVS.
Most approaches to mechanical verification of pipelined processors rely
on several key techniques. First, given a pipelined implementation and a
simpler Instruction Set Architecture (ISA)-level specification, they require
a suitable abstraction mapping from an implementation state to a specifica-
tion state. They use the abstraction function to establish a correspondence
between the two machines by means of a commutative diagram. Second,
they use symbolic simulation to derive logical expressions corresponding
to the two paths in the commutative diagram, which are then tested for
equivalence. An automatic way to perform this equivalence testing is to use
ground decision procedures for equality with uninterpreted functions such as
the ones in PVS. This strategy has been used to verify several processors in
PVS [Cyr93, CRSS94, SM95]. Some of the approaches to pipelined proces-
sor verification rely on the user providing the definition for the abstraction
function. Burch and Dill in [BD94] observed that the effect of flushing the
pipeline, for example by pumping a sequence of NOPs, can be used to auto-
matically compute a suitable abstraction function. Burch and Dill used this
flushing approach along with a validity checker [JDB95, BDL96] (i.e., their
version of a decision procedure for uninterpreted functions with equality) to
effectively automate the verification of pipelined implementations of several
processors.
The pure flushing approach has the drawback of making the size of the
generated abstraction function and the number of examined cases imprac-
tically large for deep and complex superscalar pipelines. To verify a su-
perscalar example using the flushing approach, Burch [Bur96] decomposed
the verification problem into three subproblems and suggested a technique
requiring the user to add some extra control inputs to the implementation
and set them appropriately to construct the abstraction function. He also
had to fine-tune the validity checker used in the experiment, requiring the

userto help it with manymanuallyderivedcasesplits. It is unclearhowthedecompositionof theproofandtheabstractionfunctionusedin [Bur96]canbe reusedfor verifyingothersuperscalarexamples.Anotherdrawbackof the pure flushingapproachis that it is hard to usefor pipelineswithindeterminatelatency. Sucha situation can ariseif the control involvesdata-dependentloopsor if somepart of theprocessor,suchasthe memory-cacheinterface,is abstractedawayfor managingthe complexityin verifyinga largesystem.
Weproposea systematicmethodologyto modularizeaswell asdecom-posethe proofof correctnessof microprocessorswith complexpipelinear-chitectures.Calledthe completion functions method, our approach relies on
the user expressing the abstraction function in terms of a set of completion
functions, one per unfinished instruction in the machine. Each completion
function specifies the desired effect (on the observables) of completing the
instruction. Notice that one is not obligated to state how such completion
would actually be attained, which, indeed, can be very complex, involving
details such as squashing, pipeline stalls, and even data-dependent iterative
loops. Moreover, we strongly believe that a typical designer would have a
very clear understanding of the completion functions, and would not find
the task of describing them and constructing the abstraction function oner-
ous. In addition to actually gaining from designers' insights, verification
based on the completion functions method has other advantages. It results
in a natural decomposition of proofs. Proofs build up in a layered manner
where the designer actually debugs the last pipeline stage first through a
verification condition, and then uses this verification condition as a rewrite
rule in debugging the penultimate stage, and so on. Because of this layering,
the proof strategy employed is fairly simple and almost generic in practice.
Debugging is far more effective than in other methods because errors can
be localized to a stage, eliminating the need to wade through monolithic
proofs.
Related Work
Levitt and Olukotun [LO96] use an "unpipelining" technique for merging
successive pipeline stages through a series of behavior preserving transfor-
mations. While unpipelining also results in a decomposition of the proofs,
their transformation is performed on the implementation, whereas comple-
tion functions are defined based on the specification. Their transformations,
whihc have been used only for a single issue pipeline, can get complex for
superscalar processors and processors with out-of-order execution. Cyrluk's

4 Chapter 1. Introduction
technique in [Cyr96], which has also been applied to a superscalar processor,
tackles the term size and case explosion problem by lazily "inverting the ab-
straction mapping" to replace big implementation terms with smaller spec-
ification terms and using the conditions in the specification terms to guide
the proof. Park and Dill have used aggregation functions [PD96], which are
conceptually similar to completion functions, for distributed cache coherence
protocol verification. In [SH97], Sawada and Hunt used an incremental ver-
ification technique to verify a processor with out-of-order execution, which
we have reverified with our approach. We describe the differences between
the two approaches in section 3.3.

Chapter 2
The Completion Functions
Approach to Processor
Verification
The completion functions approach aims to develop the proof of correctness
of pipelined processors in a modular and layered fashion.
2.1 Pipelined Microprocessor Correctness Crite-
ria
Figure 2.1(a) shows the correctness criterion (used in [SH97, BD94]) that we
aim to establish. Figure 2.1(a) requires that every sequence of n implemen-
tation transitions that start and end with flushed states (i.e., no partially
executed instructions) corresponds to a sequence of m instructions (i.e., tran-
sitions) executed by the specification machine. I_step is the implementation
transition function and A_step is the specification transition function. The
projection extracts only those implementation state components visible
to the specification (i.e., the observables). This criterion is preferred over
others where the commute diagram does not necessarily start with a flushed
state because it corresponds to the intuition that a real pipelined micropro-
cessor starting at a flushed state, running some program and terminating in
a flushed state is emulated by a specification machine whose starting and
terminating states are in direct correspondence through projection. This
criterion can be proved by induction on n once the commutative diagram
condition shown in Figure 2.1(b) has been proved on a single implementa-

Chapter 2. The Completion Functions Approach
tion machine transition. This inductive proof can be constructed once, as we
have demonstrated in the proof files given in [Hos98], for arbitrary machines
that satisfy the conditions described in the next paragraph. In the rest of
the paper, we concentrate on verifying the commutative diagram condition.
flushed
impl state
I I
nI step i ImA stepI I
pro ec io ";flushed
implstate
(a)
im state
El
I step
El
ABS ,.(
.(ABS
)
A step
)
(b)
Figure 2.1: Pipelined microprocessor correctness criteria
Intuitively, Figure 2. l(b) states that if the implementation machine starts
in an arbitrary reachable state impl_state and the specification machine
starts in a corresponding specification state (given by an abstraction func-
tion ABS), then after execution of a transition, their new states correspond.
ABS must be chosen so that for all flushed states fs the projection condi-
tion ABS(fs) = projection(fs) holds. The commutative diagram uses a
modified transition function A_step', which denotes zero or more applica-
tions of A_step, because an implementation transition from an arbitrary

2.2. The Completion Functions Approach 7
state might correspond to executing in the specification machine zero in-
structions (e.g., if the implementation machine stalls because of pipeline
interlocks) or more than one instruction (e.g., if the implementation ma-
chine has multiple pipelines). The number of instructions executed by the
specification machine is provided by a user-defined synchronization function
on implementation states. One of the crucial proof obligations is to show
that this function does not always return zero. One also needs to prove that
the implementation machine will eventually reach a flushed state if no more
instructions are inserted into the machine, to make sure that the correctness
criterion in Figure 2.1(a) is not vacuous. In addition, the user may need to
discover invariants to restrict the set of impl_state considered in the proof
of Figure 2.1(b) and prove that it is closed under I_step.
2.2 The Completion Functions Approach
One way of defining ABS is to use a part of the implementation definition,
modified, if necessary, to construct an explicit flush operation [BD94, Bur96].
The completion functions approach is based on using an abstraction function
that is behaviorally equivalent to flushing but is not derived operationally
via flushing. 1 Rather, we construct the abstraction function as a composi-
tion (followed by a projection) in terms of a set of completion functions that
map an implementation state to an implementation state. Each completion
function specifies the desired effect on the observables of completing a partic-
ular unfinished instruction in the machine (assuming those that were fetched
ahead of it are completed), leaving all nonobservable state components un-
changed. The order in which these functions are composed is determined
by the program order of the unfinished instructions. One can use any order
that is consistent, i.e., that has the same effect, as the program order. The
conditions under which each function is composed with the rest, if any, is
determined by whether the unfinished instructions ahead of it could disrupt
the flow of instructions, for example, by being a taken branch or by raising
an exception. Observe that one is not required to state how these conditions
are actually realized in the implementation. Any mistakes, either in speci-
fying the completion functions or in constructing the abstraction function,
might lead to a false negative verification result, but never a false positive.
Consider a very simple four-stage pipeline with one observable state com-
ponent regfile, which is shown in Figure 2.2. The instructions flow down
the pipeline with every cycle in order with no stalls, hazards, and so forth,
1Later we discuss a hybrid scheme extension that uses operational flushing.

Chapter 2. The Completion Functions Approach
updating the regfile in the last stage. (This is unrealistically simple, but
we explain how to handle these artifacts in subsequent sections.) At any
time, the pipeline can contain three unfinished instructions, which are held
in the three sets of pipeline registers labeled IF/ID, ID/EX, and EX/WB.
The completion function corresponding to an unfinished instruction held
in a set of pipeline registers (such as ID/EX) defines how the information
stored in those registers is combined to complete that instruction. In our
example, the completion functions are C_EX_WB,C_ID_EX, and C_IF_ID, re-
spectively. Now the abstraction function, whose effect should be to flush
the pipeline, can be expressed as a composition of these completion func-
tions as follows (we omit projection here as regfile is the only observable
state component):
ABS(impl_state) = C_IF_ID(C_ID_EX(C_EX_WB(impl_state)))
IFflD ID_Xi i
Fetch i Decode i
IF -- ID --i i
i
i
i
i
i
i
i
i
EX/WBi
Execute i Writeback
EX i WBi
re'file
impl_state
E]C-EX-WBo C ID EX O C IF ID O
I_step _ /v/ vc/ vc / /A_step
C EX WB C ID EX C IF IDI I
Figure 2.2: A simple four-stage pipeline and decomposition of the proof
under completion functions

2.2. The Completion Functions Approach
This definition of the abstraction function leads to a decomposition of
the proof of the commutative diagram for regfile as shown in Figure 2.2,
generating the following series of verification conditions, the last one of which
corresponds to the complete commutative diagram:
VCl: regfile(l_step(impl_state)) = regfile(C_EX_WB(impl_state))
VC2: regfile(C_EX_WB(I_step(impl_state))) =
regfile(C_ID_EX(C_EX_WB(impl_state)))
VC3: regfile(C_ID_EX(C_EX_WB(I_step(impl_state)))) =
regfile(C_IF_ID(C_ID_EX(C_EX_WB(impl_state))))
VC4: regfile(C_IF_ID(C_ID_EX(C_EX_WB(I_step(impl_state))))) =
regfile(A_step(C_IF_ID(C_ID_EX(C_EX_WB(impl_state)))))
The strategy behind the generation of verification conditions uses the fact
that I_step executes some part of each of the instructions already in the
pipeline as well as the newly fetched instruction. Each verification condition
states the expected effect of I_step has in advancing an instruction in the
pipeline. This effect can be expressed in terms of the completion functions.
For example, VC1 expresses the effect of I_step on the instruction in the
EX/WB registers: since regfile is updated in the last stage, we would
expect that after I_step is executed, the contents of regfile would be the
same as after completion of the instruction in the EX/WB registers.
Now consider the instruction in ID/EX. I_step executes it partially as per
the logic in stage EX, and then moves the result to the EX/WB registers.
C_EX_WBcan now be used to complete this instruction. This computation
must result in the same contents of regfile as completion of the instruc-
tions held in sets EX/WB and ID/EX of pipeline registers in that order.
This requirement is captured by VC2. VC3 and VC4 are constructed simi-
larly. Note that our ultimate goal is to prove VC4, with the proofs of VC1
through VC3 acting as "helpers." Each verification condition in the above
series can be proved using a standard strategy that involves expanding the
outermost function on both sides of the equation and using the previously
proved verification conditions (if any) as rewrite rules to simplify the expres-
sions, followed by automatic case analysis of the boolean terms appearing
in the conditional structure of the simplified expressions. Since we expand
only the topmost functions on both sides, and because we use the previously
proved verification conditions, the sizes of the expressions produced during
the proof and the required case analysis are kept in check.
The completion functions approach also supports incremental and lay-
ered verification. When proving VC1, we are verifying the write-back stage

10 Chapter 2. The Completion Functions Approach
of the pipeline against its specification C_EX_I4B.When proving VC2, we are
verifying one more stage of the pipeline, and so on. This makes it easier to
locate errors. In the flushing approach, if there is a bug in the pipeline, the
validity checker would produce a counterexample--a set of formulas poten-
tially involving all the implementation variables--that implies the negation
of the formula corresponding to the commutative diagram. Such a coun-
terexample cannot isolate the stage in which the bug occurred.
Another advantage of using completion functions is that their definition,
unlike that of a flush operation, is not dependent on the latency of the
pipeline. Hence, our method is applicable even when the latency of the
pipeline is indeterminate. Such a situation can occur when, for example, the
pipeline contains data-dependent iterative loops or when the implementation
machine has nondeterminism. The proof that the implementation eventually
reaches a flushed state can be constructed by defining a measure function
that returns the number of cycles the implementation takes to flush and
showing that the measure decreases after a transition from a nonflushedstate.
A disadvantage of the completion functions approach is that the user
must explicitly specify the definitions for these completion functions and
then construct an abstraction function. In a later section, we describe a
hybrid approach to reduce the manual effort involved in this process.

Chapter 3
Application of Our
Methodology
In this section, we illustrate the application of our methodology to verify
three examples: pipelined and superscalar pipelined implementations of a
subset of the DLX processor [HP90] and a processor with out-of-order execu-
tion. The DLX example was previously verified in [BD94] using the flushing
approach, the superscalar DLX example in [Bur96], and the processor with
out-of-order execution in [SH97]. We describe how to specify the comple-
tion functions, construct an abstraction function, and handle stalls. We also
show the handling of speculative fetching and out-of-order execution, and
illustrate the particular decomposition and the proof strategies we used. In
Section 3.4, we explain a hybrid approach that reduces the effort in specify-
ing the completion functions in some cases. Our verification is carried out
in PVS [ORSvH95]. The detailed implementation, specification, and the
proofs for all these examples can be found at [Hos98].
3.1 Application to the DLX Processor
The specification of this processor has four state components: the program
counter pc, the register file regfile, the data memory dmem, and the in-
struction memory imem. The processor supports six types of instruction:
load, store, unconditional jump, conditional branch, alu-immediate and
a three-register alu instruction. The ALU is modeled using an uninter-
preted function. The memory system and the register file are modeled as
stores with read and write operations.
The implementation uses a five-stage pipeline as shown in Figure 3.1. We
11

12 Chapter 3. Application of Our Methodology
bubble idinstr id
Fetch a new
instmction.
Update pc.
IF
IF/ID
Complete jumf
and branch
Rin_taid_;_rna_i as
fo;? ers ID
bubbleex
operanda
operand b
opcode ex
destex
offsetex
ID/EX
Compute alu
result or the
target memot2¢
address.
EX
i
dest illeill
result illeill
load flag
store flag
mar
EX/MEM
iiiiiiiiiiii
dest wbresult wb
Store to or
load fiom
illeillO i_/.
MEM
MEM/WB
Write to the
register file.
WB
Figure 3.1: Pipelined implementation
organize the fifteen pipeline registers holding information about the partially
executed instructions in the design into four sets (shown in columns in Fig-
ure 3.1). The intended functionality of each stage is described in words
inside the box denoting the stage. The observable components modified in
each stage are indicated above the stage (e.g., pc is incremented in the IF
stage and conditionally modified in the ID stage--and hence is shown twice).
The implementation uses a simple "assume not taken" prediction strategy
for jump and branch instructions. Consequently, if a jump or branch is
indeed taken (br_taken signal is asserted), then the pipeline squashes the
subsequent instruction and corrects the pc. If the instruction in the IF/ID
registers is dependent on a load in the ID/EX registers, then that instruc-
tion will be stalled for one cycle (st_issue signal is asserted); otherwise,
the instructions flow down the pipeline with every cycle. No instruction is
fetched in the cycle where stall_input is asserted. The implementation
provides forwarding of data to the instruction decode unit (ID stage) where
the operands are read. The details of forwarding are not shown in the figure.

3.1. Application to the DLX Processor 13
3.1.1 Completion Functions and Constructing the Abstrac-tion Function
The processor can have at most four partially executed instructions at any
time, one each in the four sets of pipeline registers shown in Figure 3.1.
We associate a completion function with each such instruction. We need
to identify how a partially executed instruction is stored in a particular set
of pipeline registers--once this is done, the completion function for that
unfinished instruction can be easily derived from the ISA specification.
Consider the set IF/ID of pipeline registers. The intended functionality
of the IF stage is to fetch an instruction (place it in instr_id) and increment
the pc. The bubble_id register indicates whether or not the instruction is
valid. (It might be invalid, for example, if it is being squashed due to a taken
branch). So, to complete the execution of this instruction, the completion
function should do nothing if the instruction is not valid, otherwise it should
update the pc with the target address if it is a jump or a taken branch
instruction, update the dmem if it is a store instruction and update the
regfile if it is a load, alu-immediate or alu instruction according to the
semantics of the instruction. The details of how these operations are done
can be obtained from the ISA specification. This function is not obtained by
tracing the implementation, instead, the user directly provides the intendedeffect. Also note that we are not concerned with load interlock or data
forwarding while specifying the completion function. We call this functionC_IF_ID.

14 Chapter 3. Application of Our Methodology
Complete the unfinished instruction in ID/EX pipeline registers.
Complete_ID_EX(is:state_I):state_I =
is WITH [ (dmem) :=
_ Complete the store instruction.
IF (instr_class(opcode_ex(is)) = store)
AND N0T (bubble_ex(is)) THEN
write_dmem(dmem(is),add(operand_a(is),
offset_ex(is)),operand_b(is))
_ Otherwise leave it unchanged.
ELSE dmem(is) ENDIF,
(regfile) :=
_ Complete the load instruction.
IF N0T (dest_ex(is)=zero_reg) AND NOT(bubble_ex(is))
AND (instr_class(opcode_ex(is)) = load) THEN
write_reg(regfile(is),dest_ex(is),read_dmem(dmem(is),
add(operand_a(is),offset_ex(is))))
_ Complete alu_reg & alu_irgned instructions.
ELSIF N0T (dest_ex(is)=zero_reg) AND N0T (bubble_ex(is))
AND ((instr_class(opcode_ex(is)) = alu_reg) OK
(instr_class(opcode_ex(is)) = alu_immed)) THEN
write_reg(regfile(is),dest_ex(is),
alu(alu_op_of(opcode_ex(is)),
operand_a(is),operand_b(is)))
_ Otherwise leave it unchanged.
ELSE regfile(is) ENDIF ]
k/_
Complete the unfinished instruction in MEM/WB pipeline registers.
Complete_MEM_WB(is:state_I):state_I =
is WITH [ (regfile) :=
_ regfile is the only component updated here.
IF NOT(dest_wb(is)=zero_reg) THEN
write_reg(regfile(is),dest_wb(is),result_wb(is))
ELSE regfile(is) ENDIF ]
Now consider the unfinished instruction in the set ID/EX of pipeline
registers. The ID stage completes the execution of jump and branch in-
structions, so this instruction would affect only dmem and regfile. The
bubble_ex indicates whether or not this instruction is valid, operand_a
and operand_b are the two operands read by the ID stage, opcode_ex and
dest_ex determine the opcode and the destination register of the instruc-
tion and offset_ex is used to calculate the memory address for load and
store instructions. The completion function should state how these bits
of information can be combined to complete the instruction, which again
can be gleaned from the specification. We call this function C_ID_EX. Simi-
larly, the completion functions for the other two sets of pipeline registers--
C_EX_MEM and C_MEM_WB--arespecified.Two ofthesefunctions--C_ID_EXand

3.1. Application to the DLX Processor 15
C_MEM_WB--areshown in the PVS code fragment [_.
The completion functions for the unfinished instructions in the initial
sets of pipeline registers are very close to the specification and it is very
easy to derive them. (For example, C_IF_ID is almost the same as the speci-
fication.) However, the completion functions for the unfinished instructions
in the later sets of pipeline registers are harder to derive, as the user needsto understand how the information about the instruction is stored in the
various pipeline registers, but the functions themselves are usually much
more compact. For example, once the designer knows that result_wb holds
the result of the instruction in the write-back stage, all C_NEM_WBhas to do
is to update the register using result_wb. Also the completion functions
are independent of how the various stages are implemented and just depend
on their functionality.
Since the instructions flow down the pipeline in program order, the ab-
straction function--which should have the cumulative effect of flushing the
pipeline--is defined as a simple composition of these completion functions:
ABS (impl_state) =
project ion (C_IF_ID(C_ID_EX(C_EX_MEM(C_MEM_WB(impl_state)))))
The synchronization function in this example returns zero if the instruction
in IF/ID registers is not issued because of a load interlock, or if no instruction
is fetched (because stall_input is asserted), or if the instruction fetched is
squashed because of a taken branch; otherwise, it returns one.
sync(impl_state:state_I): nat =
IF st_issue(impl_state) OR stall_input(impl_state)
OR br taken(imp1 state) THEN 0
ELSE I ENDIF
3.1.2 The Decomposition of the Proof
The decomposition we used for regfile for this example is shown in Fig-
ure 3.2. The justification for the first three verification conditions is similar
to that given for the example in Section 2.2.
However, in deriving verification conditions for the instruction i in the
IF/ID registers it is necessary to consider two separate cases depending on
whether or not the instruction could get stalled because of a load interlock.
If i is stalled, that is, st_issue is true in impl_state, then I_step will not
be advancing, i.e., has no effect on, the instruction i. So, the observables
at point 1 in Figure 3.2 should be as though i is not completed--C_IF_ID
should be applied in the upper path in the commutative diagram. VC4_r
captures this case (condition P1 = st_issue) shown in _]).

16 Chapter 3. Application of Our Methodology
VC5_r is for the case when the instruction i is issued (so it should be
proved under condition P2 = NOT st_issue) and is generated similar to the
first three verification conditions. Observe that st_issue also appears as
a disjunct in the synchronization function and hence in A_step' Finally,
VC6_r is the verification condition corresponding to the final commutative
diagram for regfile.
VC4_r: LEMMA
FORALL (is:state_I, inp:inputs_type):
st_issue(is) IMPLIES
regfile(Complete_ID_EX(Complete_EX_MEM
(Complete_MEM_WB(l_step(is,inp))))) =
regfile(Complete_ID_EX(Complete_EX_MEM(Complete_MEM_WB(is))))
in] state
[]
I ste
C MEM WB x--O C EXMEM ,- C ID EX ,- CIF ID x__t,"
_ _ _ PIV_VC5r
/ J 1/ _,C MEM WB x--O C EX MEM " (_ C ID EX "1 @ C IF ID x--_
A step _
VC6 r
Figure 3.2: The decomposition of the commutative diagram for regfile
In general, we generate a separate verification condition for each of the
observables, because not every stage modifies every observable. The de-
composition used, and hence the VCs generated, for a particular observable
depends on the pipeline stages where that observable is updated. For exam-
ple, the first verification condition VCI_d for dmem, shown in [], states that
completing the instruction in the MEM/WB registers has no effect on dmem
since dmem is not updated in the last stage of the pipeline. Other verification
conditions are exactly identical to that of regfile.

3.1. Application to the DLX Processor 17
_ First verification condition for dmem.
VCl_d: LEMMA
FOKALL (impl_state:state_I):
dmem(C_MEM_WB(impl_state)) = dmem(impl_state)
_ First verification condition for pc.
VCl_p: LEMMA
FOKALL (impl_state:state_I):
pc(Complete_ID_EX(Complete_EX_MEM(Complete_MEM_WB(impl_state))))
= pc(impl_state)
_ Second verification condition for pc.
VC2_p: LEMMA
FOKALL (impl_state:state_I):
N0T st_issue(impl_state) AND N0T br_taken(impl_state) IMPLIES
pc(Complete_IF_ID(Complete_ID_EX(
Complete_EX_MEM(Complete_MEM_WB(impl_state))))) =
pc(impl_state)
_ First verification condition for imem.
VCl_i: LEMMA
FOKALL (impl_state:state_I):
imem(Complete_IF_ID(Complete_ID_EX(
Complete_EX_MEM(Complete_MEM_WB(impl_state)))) =
imem(impl_state)
In
The decomposition for pc has three verification conditions. The last
three stages do not modify pc, and this fact is stated by VCI_p (shown in
[]). (The three completion functions are combined into one). The second
verification condition VC2_p captures the conditions under which the in-
struction in IF/ID registers does not affect pc and is shown in []. The third
verification condition corresponds to the final commutative diagram for pc.
Finally, the decomposition for imem has two verification conditions. The
first one is similar to VCI_p and is shown in _ and the second one corre-
sponds to the final commutative diagram for imem.
In summary, the decomposition we used has six verification conditions
for regfile and dmem, three for pc and two for imem, all systematically
generated as explained earlier. Also, this is the particular decomposition
that we chose; others are possible. For example, we could have avoided
generating and proving, say VC2_r, and proved that goal when it arises
within the proof of VC3_r if the prover can handle the term sizes.
3.1.3 The Proof Details
The proof is organized into three phases:

18 Chapter 3. Application of Our Methodology
Generating and proving a set of rewrite rules that express certain
general properties about the completion functions.
Proving the verification conditions and other lemmas using the basicrewrite rules.
• Proving other proof obligations mentioned in Chapter 2 including in-
variants, if needed.
Rewrite rules about completion functions
These rules express the basic property that the completion functions: should
not modify, i.e., map to the same value, the hidden (i.e., nonobservable) vari-
ables. For each register in a particular set of pipeline registers, we need a
rewrite rule stating that the register is unaffected by the completion func-
tions of the unfinished instructions ahead of it. For example, for bubble_ex,the rewrite rule is:
bubble_ex (C_EX_MEM(C_MEM_WB(impl_state)) ) = bubble_ex (impl_state).
All these rules can be automatically generated (once the completion func-
tions are identified) and automatically proved by rewriting using the defini-
tions of the completion functions. We then define a PVS strategy
setup-rewrite-rules to make and enter these rules into the prover, and
the definitions and the axioms from the implementation and the specification
(leaving out a few on which we do case analysis), as rewrite rules.
Proving the verification conditions and other lemmas
The proof strategy for proving all the verification conditions is similar--
use the PVS strategy setup-rewrite-rules to install the rewrite rules
mentioned earlier, set up the previously proved verification conditions as
rewrite rules, expand the outermost functions on both sides, use the PVS
command assert to do the rewrites and simplifications by decision proce-
dures, and then perform case analysis with the PVS strategy (apply (then*
(repeat (lift-if)) (bddsimp) (ground))). Minor differences were that
some verification conditions (like VCI_d, VCI_p) were proved simply by ex-
panding the definitions of the completion functions, some verification con-
ditions (like VC4_r) needed the outermost function to be expanded on only
one side (see _], expand the first occurrence of C_ID_EX and then use VC3_r),
and some were slightly more involved (like VC6_r), needing case analysis on
the various terms introduced by expanding A_step' followed by a similar
proof strategy as mentioned above.

3.1. Application to the DLX Processor 19
The proof above needed a lemma expressing the correctness of the feed-
back logic. With completion functions, we could state this succinctly asfollows:
new_operand_a is the value returned by the feedback logic.
val a is the value found in the register file.
lemma new operand a: LEMMA
FORALL (is:state I):
NOT stall issue(is) AND NOT bubble id(is) IMPLIES
new_operand_a(is) =
val a(Complete ID EX(Complete EX MEM(Complete MEM WB(is))))
LA_
That is, the value read in the ID stage by the feedback logic (when the
instruction in the IF/ID registers is valid and not stalled) is the same as
the value read from regfile after the three instructions ahead of it are
completed. Observe that without completion functions, it would be hard to
state the correctness of the feedback logic. Its proof is done by using the
strategy setup-rewrite-rules to install rewrite rules mentioned earlier,
and then setting up the definitions occurring in the lemma as rewrite rules,
followed by the PVS command assert to do the rewrites and simplifications
by decision procedures, followed by (apply (then* (repeat (lift-if))
(bddsimp) (ground))) to do the case analysis.
Other proof obligations
We needed one invariant on the reachable states in this example, and it was
discovered during the proof of VC3_r. The proof that the invariant is closed
under I_step is trivial.
Finally, we prove that the implementation machine eventually goes to
a flushed state ("Eventual flush" obligation) if it is stalled sufficiently long
enough and then check in that flushed state fs, ABS (fs) = proj ection(fs).
For this example, this proof was done by observing that bubble_id will be
true after two stall transitions (hence no instruction in the IF/ID regis-
ters) and that this "no-instruction'-hess propagates down the pipeline with
every stall transition. We also need to show that the synchronization func-
tion does not always return zero ("No indefinite stutter") and the proof is
straightforward.
The table below shows the overall proof organization:

20 Chapter 3. Application of Our Methodology
Proof Obligation Comments
Rewrite rules Automatically generated.
Verification Conditions
Lemma about feedback logicOne invariant
"Eventual flush" obligation
"No indefinite stutter" obligation
6 each for regfile and dmem,
3 for pc and 2 for imem.
All systematically generated.
Uniformly needed in all examples.
3.2 Application to Superscalar DLX Processor
The superscalar DLX processor [Bur96] is a dual-issue version of the DLX
processor. Both the pipelines have a structure similar to the one shown in
Figure 3.1 except that the second pipeline executes only alu-immediate and
alu instructions. In addition, the processor has a one-instruction buffer.
IF IDA I
IF ID B I
_gic
_- Fhst Pipeline
" Second PipelineALU instructions only
IF ID C_ Buffer
Figure 3.3: The issue logic in the superscalar DLX processor

3.2. Application to Superscalar DLX Processor 21
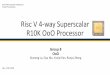
The issue logic in this processor model, shown in Figure 3.3, is fairly
complex--from zero to two instructions can be issued per cycle. Instruction
j can get stalled because of a load interlock, a dependency on instruction i,or because it is neither an alu-immediate nor alu instruction. If instruction
i is a taken branch, then instructions j and k need to be squashed. These
factors affect the latency of an instruction waiting to be issued and lead to
many scenarios in the proof of the commutative diagram. Once instructions
are issued, they flow down the pipeline and complete execution as in the
DLX example.
3.2.1 Completion Functions and the Abstraction Function
Specifying the completion functions for the various unfinished instructions is
similar to the DLX example. This example has nine unfinished instructions,
so there are potentially nine completion functions. Since the issued instruc-
tions proceed down the pipeline in lockstep, we state the combined effect
of completing instructions in the corresponding stages in the two pipelines
for the last three stages, and so we have only six completion functions. One
main difference is in constructing the abstraction function--we must state
how the completion functions of the unfinished instructions (i, j, and k)
in the IF/ID registers and the instruction buffer are composed to handle
the speculative fetching of instructions. These unfinished instructions could
be potential branches since the branch instructions are executed in the first
stage of the first pipeline as shown in Figure 3.3. So, while constructing
the abstraction function, instruction j should be completed only if instruc-
tion i is not a taken branch. This is as shown in [], where the completion
functions are named C_i, C_j, and C_k). Similarly, instruction k should be
completed only if instructions i and j are not taken branches. We used a
similar idea in constructing the synchronization function. The specification
machine would not execute any new instructions if any of the instructions
i, j, k mentioned above is a taken branch.

22 Chapter 3. Application of Our Methodology
Completing the instructions i & j.
'rs' should be the composition of the completion functions of
the instructions ahead of i, in order.
This predicate tests if instruction i is a taken branch.
branch_taken_pipe_a(rs:real_state) : bool =
instr_kind_a(rs) = J 0R (instr_kind_a(rs) = BEQZ
AND select(reg(rs),rfl_of(instr_id_a(rs))) = zero)
Complete_IF_ID_AB(rs: impl_state): impl_state =
IF N0T bubble_id_a(rs) AND branch_taken_pipe_a(rs) THEN
Don't complete C_j, if instruction i is a taken branch.
C_i(rs)
ELSE
If not, complete instruction j.
C_j (C_i(rs))
ENDIF
It is very easy and natural to express these conditions by using comple-
tion functions since we are not concerned with exactly when the branches
are taken in the implementation machine. (See, for example, the predicate
branch_taken_pipe_a above). However, in the pure flushing approach, even
the definition of the synchronization function will be much more compli-
cated because it is necessary to cycle the implementation machine for many
cycles [Bur96].
The Differences with the DLX Proof
Because of the complexity of the issue logic in this example_ we needed eight
additional verification conditions capturing the various scenarios in which
the instructions get issued or stalled_ or moved around. The proofs of all
the verification conditions used similar strategies. The second difference was
that the synchronization function had many more cases in this example_ and
the previously proved verification conditions were used several times during
the proof.
3.3 Application to Out-of-order Execution
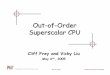
We have applied our methodology to an out-of-order execution processor
that was verified by Sawada and Hunt in [SH97]. This processor_ shown in
Figure 3.4_ has three execution units--a multiplier_ a load/store unit_ and
an adder--sharing the write-back stage. The patterned rectangular boxes
show the pipeline registers. The structural hazard due to this sharing of the
write-back stage is resolved in the issue logic by ensuring there is at most

3.3. Application to Out-of-order Execution 23
one instruction attempting to enter the write-back stage in any clock cycle.
An add instruction takes one cycle in the execution unit, a load instruction
takes two cycles, and a mult instruction takes three cycles. Since there is
no reorder buffer, instructions retire immediately after execution. So an add
instruction, issued immediately after a mult instruction, can complete before
it. The processor allows such out-of-order execution of an add instruction
only if its destination register is different from that of the mult instruction
issued earlier to avoid write-after-write hazards. The processor keeps track
of the current instructions executing in the three execution units in the
Scheduling Registers block for this purpose.
W/DC DC/EX
Bypass Logic
(address
calculation)
MLI/ML2
Scheduling Registers
ML2/ML3
EX/WB
] Mult
[ Unit 3
LDI_D2
Figure 3.4: The processor with out-of-order execution (example used in
[SH97])
3.3.1 Constructing the Abstraction Function
The abstraction function for this example is as shown in _] where the com-
pletion functions are named using the same convention as in the previous
examples. Note that the completion function for IF/DC and DC/EX stages
have been combined into one. The definitions for the completion functions
were derived in a fashion similar to the one used in the previous exam-
ples. In the previous examples the program order was apparent from the

24 Chapter 3. Application of Our Methodology
structure of the pipelines and order in which the pipeline stages were exe-
cuted. Whereas here, because of the possibility of out-of-order execution,
the implementation machine does not have sufficient information to derive
the exact program order. For example, the instruction in EX/WB may or
may not be ahead of the instruction in ML2/ML3 in the program order.
Similarly, the program order of the instructions in LD1/LD2 and ML1/ML2
is unclear. In _], we have used CompleteYlL2YlL3 after Complete_gXNB,
i.e., the stage execution order, in the composition because that order is al-
ways guaranteed to consistent with the program order because there cannot
be write-after-write hazards. For ML1/ML and LD1/LD2, either order is
fine because there can be at most one valid instruction in any given cycle in
those registers.
Complete_IF_DC_EX completes the instruction in DC/EX
and then the one in IF/DC
if the first one is not squashed.
ABS(is:impl state): abs state =
project(Complete IF DC EX(Complete LDI LD2(
Complete MLI ML2(Complete ML2 ML3(Complete EX WB(is))))
3.3.2 Proof Details
The strategy behind generation of the verification conditions for this pro-
cessor is based on the observation that four cases arise when considering the
instruction about to access the write-back stage--a mult instruction in the
ML2/ML3 registers, a load instruction in the LD1/LD2 registers, an add
instruction in DC/EX registers that is about to be issued, and none of these
three possibilities. That these cases are mutually exclusive follows from
the fact that the structural hazard is resolved properly by the issue logic,
which is proved as an invariant. We then systematically build the proof of
the commutative diagram in the above four cases, formulating and proving
the verification conditions as in the earlier examples. The interesting case
is the scenario of out-of-order completion when the add instruction being
issued (from DC/EX registers) bypasses a mult instruction issued earlier
(and present in ML1/ML2 registers). As mentioned previously, the proces-
sor would issue such an add instruction only if its destination register is
different from that of the mult instruction issued earlier. So, though the
implementation completes the add instruction before the mult instruction,
one can prove that the net effect is as though mult is completed before add,
that is, the instructions are completed in the order used by the abstraction
function. This is captured by the following reordering lemma:

3.4. Hybrid Approach to Reduce the Manual Effort 25
lemma_reordering: LEMMA
FORALL (is : impl_state): issue_add?(is) IMPLIES
_ DC/EX has add instruction and MLI/ML2 has a mult instruction.
reg(Complete_MLl_ML2(Complete_DC_EX(
Complete_ML2_ML3(Complete_EX_WB(is))))) =
reg(Complete_DC_EX(Complete_MLl_ML2(
Complete_ML2_ML3(Complete_EX_WB(is)))))
The other details of the proof, such as, handling the bypass logic and squash-
ing, are similar to the earlier examples.
3.3.3 Comparison with the MAETT Approach
In [SH97], Sawada and Hunt construct an intermediate abstraction of the
implementation machine by using a table (called MAETT) representing the
(infinite) trace of all executed instructions up to the present time. They
achieve incrementality by postulating and proving individually a large set
of invariant properties about this intermediate representation, from which
they derive the final correctness proof. The main difference of our approach
is that the incremental nature of the proof in our case arises from the way
we construct our abstraction function and the decomposition of the proof
of the commutative diagram to which it leads. This decomposition is to a
large extent independent of the processor design. Our approach also has
the advantage that the amount of information the user needs to specify is
significantly less than in their method. For example, we require just a few
simple invariants on the reachable states and do not need to construct an
explicit intermediate abstraction of the implementation machine.
3.4 Hybrid Approach to Reduce the Manual Ef-
fort
In some cases, it is possible to derive the definitions of some of the comple-
tion functions automatically from the implementation to reduce the manual
effort. We illustrate this hybrid approach on the DLX example.
The implementation machine is specified in the form of a typical transi-
tion function giving the "new" value for each state component as a function
of the old values. Since the implementation modifies the regfile in the
write-back stage, we take C_MEM_WB to be new_regfile, which is a func-
tion of dest_wb and result_wb. To determine how C_EXYlEM updates the
register file from CAIEM_WB,we perform a step of symbolic simulation of
the nonobservables in the definition of CYlEM_WB,that is, replace dest_wb

26 Chapter 3. Application of Our Methodology
and result_wb in its definition with their "new-" counterparts. Since the
MEM stage updates dmem, C_EX21EM will have another component modify-
ing dmem, which we simply take as new_dmem. Similarly, we derive C_ID_EX
from C_EX21EM through symbolic simulation. For the IF/ID registers, this
procedure gets complicated on two counts: the instruction there that could
get stalled because of a load interlock, and the forwarding logic that appears
in the ID stage. So, we let the user specify this function directly. We have
done a complete proof using these completion functions. The details of the
proof are similar. An important difference to note is that the verification
with this hybrid approach eliminated the need for the invariant that wasneeded earlier.
While reducing the manual effort, this way of deriving the completion
functions from the implementation has the disadvantage that we are verify-
ing the implementation against itself This contradicts our view of these as
desired specifications and negates our goal of incremental verification. To
combine the advantages of both, we could use a mixed approach where we
use explicitly provided and symbolically generated completion functions in
combination. For example, we could derive it for the last stage, specify it
for the penultimate stage, then derive it for the stage before that (from the
specification for the penultimate stage), and so on.

Chapter 4
Conclusions
One of the main obstacles to technology transition in the area of micropro-
cessor verification is the lack of a systematic reusable methodology for refin-
ing the verification task into small enough problems that can be discharged
automatically. The methodology must work for advanced optimization fea-
tures that are employed in today's processors. Toward this end, we have
developed a systematic approach to modularize and decompose the proof of
correctness of pipelined microprocessors with complex controllers to imple-
ment design features, such as superscalar pipelining, out-of-order execution,
and speculative execution. The overall efficiency and automation of our
method depends on the capabilities for symbolic simulation of the under-
lying verification system. Under a separate NASA task, we are enhancing
the efficiency and automation capabilities of symbolic simulation in PVS so
that the symbolic simulation speed can be brought to within a few orders
of magnitude of conventional simulation speed.
We have shown its generality by applying it to three different proces-
sors. The methodology relies on the user expressing the cumulative effect
of flushing in terms of a set of completion functions, one per unfinished
instruction. This method results in a natural decomposition of the proof
based on the individual stages of the pipeline and allows the verification to
proceed incrementally, overcoming the term size and case explosion problem
of the flushing approach. While this method increases the manual effort on
the part of the user, we found that the knowledge required in specifying the
completion functions, constructing the abstraction function, and formulat-
ing the verification conditions is close to the designer's intuition about how
the pipeline works.
One of our future plans is to build a system that uses PVS or a part of
27

28 Chapter 4. Conclusions
it as a back-end to support the methodology presented. Besides automating
parts of the methodology, this system would help the user interactively apply
the rest of the process. We would also like to see how our approach can be
extended to verify more complex pipeline control that uses reorder buffers
or other out-of-order completion techniques. Other plans include testing the
efficacy of our approach for verifying pipelines with data dependent iterative
loops and asynchronous memory interface.
Acknowledgments
We thank John Rushby and David Cyrluk for their feedback on earlier drafts
of this report.

Bibliography
[BD94]
[BDL96]
[Bur96]
[CRSS94]
[Cyr93]
[Cyr96]
[Hos98]
J. R. Burch and D. L. Dill. Automatic verification of pipelined
microprocessor control. In David Dill, editor, Computer-Aided
Verification, CAV _9_, volume 818 of Lecture Notes in Com-
puter Science, pages 68-80, Stanford, CA, June 1994. Springer-
Verlag.
Clark Barrett, David Dill, and Jeremy Levitt. Validity check-
ing for combinations of theories with equality. In Srivas and
Camilleri [SC96], pages 187-201.
J. R. Burch. Techniques for verifying superscalar microproces-
sors. In Design Automation Conference, DAC _96, June 1996.
D. Cyrluk, S. Rajah, N. Shankar, and M. K. Srivas. Effective
theorem proving for hardware verification. In Ramayya Ku-
mar and Thomas Kropf, editors, Theorem Provers in Circuit
Design (TPCD _9_), volume 910 of Lecture Notes in Computer
Science, pages 203-222, Bad Herrenalb, Germany, September
1994. Springer-Verlag.
David Cyrluk. Microprocessor verification in PVS: A method-
ology and simple example. Technical Report SRI-CSL-93-12,
Computer Science Laboratory, SRI International, Menlo Park,
CA, December 1993.
David Cyrluk. Inverting the abstraction mapping: A method-
ology for hardware verification. In Srivas and Camilleri [SC96],
pages 172-186.
Ravi Hosabettu. PVS specification and proofs of
the DLX, superscalar DLX examples and the proces-
sor with out-of-order execution, 1998. Available at
ht tp: / / www. csl.sri, co m / ~ravi / nasa / processo r.h tml.
29

30 Bibliography
[HP90]
[JDB95]
[KM96]
[LO96]
[ORSvH95]
[PD96]
[SC96]
[SH97]
[SM95]
John L. Hennessy and David A. Patterson. Computer Architec-
ture: A Quantitative Approach. Morgan Kaufmann, San Mateo,
CA, 1990.
R. B. Jones, D. L. Dill, and J. R. Burch. Efficient validity
checking for processor verification. In International Conference
on Computer Aided Design, ICCAD '95, 1995.
Matt Kaufmann and J Strother Moore. ACL2: An industrial
strength version of Nqthm. In COMPASS '96 (Proceedings
of the Eleventh Annual Conference on Computer Assurance),
pages 23-34, Gaithersburg, MD, June 1996. IEEE WashingtonSection.
Jeremy Levitt and Kunle Olukotun. A scalable formal verifi-
cation methodology for pipelined microprocessors. In Design
Automation Conference, DAC '96, June 1996.
Sam Owre, John Rushby, Natarajan Shankar, and Friedrich vonHenke. Formal verification for fault-tolerant architectures: Pro-
legomena to the design of PVS. IEEE Transactions on Software
Engineering, 21(2):107-125, February 1995.
Seungjoon Park and David L. Dill. Protocol verification by ag-
gregation of distributed actions. In Rajeev Alur and Thomas A.
Henzinger, editors, Computer-Aided Verification, CA V '96, vol-
ume 1102 of Lecture Notes in Computer Science, pages 300-310,
New Brunswick, N J, July/August 1996. Springer-Verlag.
Mandayam Srivas and Albert Camilleri, editors. Formal Meth-
ods in Computer-Aided Design (FMCAD '96), volume 1166 of
Lecture Notes in Computer Science, Palo Alto, CA, November
1996. Springer-Verlag.
J. Sawada and W. A. Hunt, Jr. Trace table based approach
for pipelined microprocessor verification. In Orna Grumberg,
editor, Computer-Aided Verification, CA V '97, volume 1254 of
Lecture Notes in Computer Science, pages 364-375, Haifa, Is-
rael, June 1997. Springer-Verlag.
Mandayam Srivas and Steven P. Miller. Formal verification
of a commercial microprocessor. Technical Report SRI-CSL-
95-4, Computer Science Laboratory, SRI International, Menlo

Bibliography 31
Park, CA, February 1995. Also available under the title Formal
Verification of an Avionics Microprocessor as NASA Contractor
Report 4682, July, 1995.

Form ApprovedREPORT DOCUMENTATION OMB No. 0704-0188
Publicreportingburden for thiscollection of informationis estimatedto average 1 hour per response,includingthe time for reviewinginstructions,searching existingdata sources,gathering and maintainingthe data needed,and completing andreviewingthe collection of information.Send comments regardingthisburden estimateor anyother aspectof thiscollection of information,includingsuggestions for reducingthisburden, to WashingtonHeadquartersServices, Directoratefor InformationOperationsand Reports,1215JeffersonDavisHighway,Suite 1204, Arlington, VA 22202-4302, andto the Officeof Managementand Budget,PaperworkReduCtionProject(0704-0188), Washington,DC 20503.
1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE
February 19994. TITLE AND SUBTITLE
A Systematic Methodology for Verifying Superscalar Microprocessors
6. AUTHOR(S)
Mandayam Srivas
Ravi Hosabettu & Ganesh Gopalakrishnan
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
SRI International; Menlo Park, CA
University of Utah; Salt Lake City, UT
9. SPONSORING / MONITORING AGENCY NAME(S) AND ADDRESS(ES)
National Aeronautics and Space Administration
Langley Research Center
Hampton, VA 23681-2199
3. REPORT TYPE AND DATES COVERED
Contractor Report5. FUNDING NUMBERS
C NAS1-20334
W 519-50-11-01
8. PERFORMING ORGANIZATION
REPORT NUMBER
10. SPONSORING / MONITORINGAGENCY REPORT NUMBER
NASA/CR- 1999-208991
11. SUPPLEMENTARY NOTES
Srivas: SRI International, Menlo Park, CA; Hosabettu, Gopalakrishnan: University of Utah, Salt Lake City, UT.
Langley Technical Monitor: Paul S. Miner Final Report
12a. DISTRIBUTION / AVAILABILITY STATEMENT
Unclassified-Unlimited
Subject Category: 61 Distribution: Standard
Availability: NASA CASI, (301) 621-0390
12b. DISTRIBUTION CODE
13. ABSTRACT (Maximum 200 words)
We present a systematic approach to decompose and incrementally build the proof of correctness of pipelined
microprocessors. The central idea is to construct the abstraction function by using completion functions, one per unfinished
instruction, each of which specifies the effect (on the observables) of completing the instruction. In addition to avoiding the
term size and case explosion problem that limits the pure flushing approach, our method helps localize errors, and also
handles stages with interative loops. The technique is illustrated on pipelined and superscalar pipelined implementations of
a subset of the DLX architecture. It has also been applied to a processor with out-of-order execution.
14. SUBJECT TERMS
Formal Methods, Microprocessor Verification, Superscalar, Theorem Proving
17. SECURITY CLASSIFICATIONOF REPORT
Unclassified
18. SECURITY CLASSIFICATIONOF THIS PAGE
Unclassified
19. SECU RITY CLASSIFICATIONOF ABSTRACT
Unclassified
15. NUMBER OF PAGES
39
16. PRICE CODE
A03
20. LIMITATION OF ABSTRACT
NSN 7540-01-280-5500 Standard Form 298 (Rev. 2-89)Prescribedby ANSI Std. Z39-18298-102