-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
1/13
Giorgio Figliolini1
Mem. ASME
Professor
Department of Civil and Mechanical Engineering,
University of Cassino and Southern Lazio,
Via G. Di Biasio 43,
Cassino, FR 03043, Italy
e-mail: [email protected]
Hellmuth StachelProfessor Emeritus
Institute of Discrete Mathematics and Geometry,
Vienna University of Technology,
Wiedner Hauptstrasse 8-10/104,
Wien A-1040, Austria
e-mail: [email protected]
Jorge AngelesFellow ASME
Professor
Department of Mechanical Engineering and CIM,
McGill University,
817 Sherbrooke Street W,
Montreal, QC H3A 03C, Canadae-mail: [email protected]
A Spatial Version of OctoidalGears Via the GeneralizedCamus
TheoremUnderstanding the geometry of gears with skew axes is a
highly demanding task, whichcan be eased by invoking Studys
Principle of Transference. By means of this principle,spherical
geometry can be readily ported into its spatial counterpart using
dual algebra.This paper is based on Martin Distelis work and on the
authors previous results, whereCamus auxiliary curve is extended to
the case of skew gears. We focus on the spatialanalog of one
particular case of cycloid bevel gears: When the auxiliary curve is
speci-fied as a pole tangent, we obtain pathologic spherical
involute gears; the profiles arealways interpenetrating at the
meshing point because of G2-contact. The spatial analogof the pole
tangent, a skew orthogonal helicoid, leads to G2-contact at a
single point com-bined with an interpenetration of the flanks.
However, when instead of a line a plane isattached to the right
helicoid, the envelopes of this plane under the roll-sliding of the
aux-iliary surface (AS) along the axodes are developable ruled
surfaces. These serve as con-jugate tooth flanks with a permanent
line contact. Our results show that these flanks aregeometrically
sound, which should lead to a generalization of octoidal bevel
gears, oreven of bevel gears carrying teeth designed with the exact
spherical involute, to thespatial case, i.e., for gears with skew
axes. [DOI: 10.1115/1.4031679]
Keywords: gears with skew axes, involute gearing, octoidal
gears, spatial Camustheorem, curvature theory
1 Introduction
Let the motions of two wheels, R2; R3, the pinion and the
gear,respectively, with respect to the machine frame R1 be given,
i.e.,the rotations R2=R1; R3=R1 about fixed skew axes I21 and
I31with angular velocities x21, x31, respectively. Throughout
thepaper, dual algebra is used extensively, with a dual
quantity,whether a scalar, a vector, or a matrix is represented
with a hat on top, its primal and dual parts with the same unhatted
vari-
able, its dual part carrying the subscript 0 [1,2]. In this
context,lines are represented with a dual unit vector (DUV), i.e.,
a dualvector whose primal part is of unit magnitude.
We use a Cartesian coordinate frameF O;x1;x2;x3 with thex1- and
x2-axes represented by the DUV e1 and e2. Axis x1 isdefined as
thedual bisectrix of lines I21 and I31, namely, the linethat (a)
passes through the midpoint of the segment of the com-mon normal to
the two lines defined by the two perpendicular feetand (b) is
parallel to the bisectrix of the angle between the twolines.
Moreover, x3 is defined as the common normal to the twolines,
whilex2completes a right-handed coordinate frame with x1andx3.
Using thedual anglea a ea0 between the x1-axis andI21 (see Fig.1),
the DUVs p21 and p31 representing the axes I21andI31 are
p21 cos ae1 sin ae2; p31 cos ae1 sin ae2 (1)
We limit ourselves to the case of skew axes, while assuming
0< a < p=2 and a0 6 0 (2)
though most of the arguments hold also in the spherical case,
witha0 0, and in the planar case witha 0 and parallel axes.
In addition, let u denote the dual angle between e1 and
theinstant screw axis (ISA) I32, which is represented by p32.
Then,we obtain
p32 cos ue1 sinue2n (3a)
x32p32 x31p31 x21 p21 (3b)
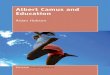
Fig. 1 Skew axesp21; p31 of the gear wheels, the ISA p32 andthe
axis p41 of the AS P4 R4 in the particular caseb5u1p=2.The Frenet
frame f1; f2; f3 of the axodes remains fixed to themachine frame
R1.
1Corresponding author.Manuscript received March 17, 2015; final
manuscript received August 28, 2015;
published online November 24, 2015. Assoc. Editor: David
Dooner.
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-1CopyrightVC 2016 by ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
2/13
Comparison of coefficients and recalling a pertinent relation2
leadto
tan ux31 x21x31 x21
tan a (4a)
u0 R sin 2u with R a0
sin2a (4b)
The vector product of both sides of Eq. (3b) with p21 and
p31results in
x21
sin u a
x31
sin u a
x32
sin 2a (5)
which sometimes is called thedual sine-theorem, as applied to
thedual trianglex21 p21; x31 p31 and x32 p32. This implies
x32 x21sin 2a
sin u a (6)
and, consequently, the pitch h32 of the relative motion R3=R2
isreadily derived [3]
h32x320
x32R cos2a cos2u 2R cos2a cos2u
(7)
The axodes of the relative motion R3=R2 are one-sheet
hyper-boloids P3 R3 and P2 R2, swept by the relative axis I32under
the inverse rotations R1=R2 and R1=R3 about I21 and
I31,respectively.
In Sec. 2, we recall Distelis spatial Camus theorem togetherwith
some of the basic formulas. Section 3 offers an account ofthe
differential geometry of ruled surfaces, and Sec.4 provides adeeper
insight intoG1- and G2-contact along lines between ruledsurfaces.
In Sec. 5, we study the differential geometry of toothflanks
obtained by means of the spatial Camus theorem. Finally,in Sec.6,
we apply all this to spatial analogs of spherical involute
and octoidal gears.
2 The Spatial Camus Theorem
The result below is due to Disteli [4].LEMMA1. For given wheels
R2; R3 there exists a frame R4 such
that the screws ofR4=R2; R4=R3, andR3=R2 are equal at
everyinstant if and only if the instant axis I41ofR4=R1 is located
on thePlucker conoid3 W, but different from I32.
Letbbe the dual angle between thex1-axis and p41, as depictedin
Fig.1. Then,
p41 cos be1 sin be2 (8)
If we specifyI41 W different fromI21;I31;I32, thenu 6 6a;b.From
Eq.(4b), which defines the Plucker conoid, we obtain
b0 R sin2b (9)
The dual sine-theorem, as applied to the trianglex21p21;
x41p41,and x42 p42 x42 p32, yields
x21
sin u b x41
sin u a
x42
sin a b (10)
Likewise, forx31 p31; x41p41, and x43 p43 x43p32
x31
sin u b x41
sin u a
x43
sin b a (11)
The instant pitchh41 x410=x41 is defined as
h41x410
x41R cos 2a cos2b (12)
Let P4 be the ruled helical surface4 traced by the relative
axis
I32 under the helical motion R1=R4 about I41 with pitch h41.
Wecall P4 the AS. Further details are provided by the authors
else-where [5]. P4 forms together with P2 and P3, the axodes of
therelative motions ofR4 with respect to R2 and R3, i.e., the
motionsR4=R2 and R4=R3 are defined by the rolling and sliding of
P4along the hyperboloidsP2 and P3, respectively. The
roll-slidingbetween the axodes implies the mutual rolling of their
sphericalimages, and hence
x21sinu a x31sinu a x41sinu b (13)
which equals the primal part of Eq.(5).The importance of the AS
P4 R4 lies in the result below [6]:THEOREM 1. (Spatial Camus
Theorem) For any line G attached
to R4, the surfaces U2; U3 traced by G under the relative
motionsR4=R2 and R4=R3, respectively, are conjugate tooth flanks
ofR3=R2. At any instant, the meshing points for these flanks
arelocated on a straight line.
With respect to the machine frame R1, the locus of the
meshinglines, i.e., themeshing surface orsurface of action, is
traced byGunder R4=R1 with the fixed twist q41 x41 p41.
Consequently,the said surface is helical, with axis p41. By virtue
of Lemma 1
p42 p43 p32 f1 and Eqs. (10) and (11), the twists ofR4=R2and
R4=R3 are
q42 x42 p42 x41p41 x21 p21
x42f1 x21 sin a b
sin u b f1
q43 x43 p43 x41p41 x31 p31
x43f1 x31 sin b a
sin u b
f1
(14)
while, on the other hand, the relative motion R3=R2 of the
gearsundergoes the twist
q32 x32 p32 x31 p31 x21 p21 x32f1
x21 sin2a
sin u a f1
x31 sin2a
sin u a f1
We can confirm that, according to Lemma 1, the twists q42;
q43,and q
32 differ by real factors only. This leads, by virtue of
Eqs.(5)and(7), to
x42 x21sin b a
sin u b 1 e h32
x43 x31sin b a
sin u b 1 e h32
x32 x21sin 2a
sin u a 1 e h32 x42 x43
(15)
2Equation (7) in Ref. [3].3Sometimes referred to as
thecylindroid.
4In this paper, the term ruled surface stands for a twice
continuouslydifferentiable one-parameter set of oriented lines.
021015-2 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
3/13
Therefore,
x42 : x43 : x32
sinu asinb a : sinu asinb a : sin2a sinu b
At every instant, the three axodes P2; P3, and P4 are in
contact
at all points of the common generator I32. Therefore, theyshare
the striction point S, i.e., the point whose tangent plane
isorthogonal to the asymptotic plane, the limit of the tangentplane
when the contact points tend to infinity. The striction pointS 0;0;
u0is the point of intersection between the ISA I32 andthe common
normal ofI21 and I31, as seen in Fig.1.
3 The Disteli Axes of a Ruled Surface
Along each nontorsal generatorG of a ruled surface, a
Frenetframe, also known as aSannia frame[7], can be defined,
consist-ing of:Gitself; thecentral normalN, which is the surface
normalat the striction point; and the central tangentT [1,8]. This
tripletof mutually orthogonal axes meets at the striction point S
ofG,defined on thestriction curve, as per Fig.2. The central
tangent isorthogonal to the asymptotic plane and tangent to the
surface atthe striction point. The motion of the Frenet frame along
the ruledsurface is calledFrenet motion.
Let, in dual-vector notation,5 the ruled surface be given by
thetwice-differentiable dual-vector function gt for t in the
openinterval J R. Then, the derivatives of the DUVs of the
Frenetframe, g; n, and t, satisfy the Frenet equationsEq. (9.11)
ofRef. [1]namely,
_g kn q g
_n kg l t q n
_t ln q t
with q lg k t xg; g g 1 (16)
Hence, ^x
2
^
k
2
^l
2. Such as the Darboux vector of a smoothspatial curve
represents a vector proportional to the angular veloc-ity vector of
the curve Frenet frame [9], the dual Darboux vectorq xg represents
the twist of the dual Frenet motion. TheDUV g
is the instantDisteli axis[10] oraxis of curvature [1] ofthe
ruled surface, providedk60.6
Remarks
(a) Even when the generators of the ruled surface are
oriented,the central normal can be oriented in two different
ways.One could obtain uniqueness by demandingk > 0.
(b) Conversely, when the dual-vector functions gt; nt;tt; t2 J,
represent a moving orthonormal frame satisfy-ing the Frenet
equations(16), this frame defines a ruled sur-face with generators
gt, with central normals nt andcentral tangents tt. Here, fork 0
also cylindric genera-tors are included. By the same token, also
the directed linestt define a ruled surface with the same given
movingframe and the same Disteli axis; only g and t change
theirroles as well as the coefficientskand l.
The Frenet equations (16) contain two dual coefficients,
k k ek0 and l l el0. Various formulas expressing invar-iants of
the ruled surface in terms ofk,k0,l, and l0are availablein Ref.
[8].7 Here, we adopt a different approach.
The dual representationgt gt e g0t; t2 J, of the ruledsurface
gives rise to a real parametrization, namely,
xt;u gt g0t u gt; t; u 2 JR (17)
Here, we recall that g g0 is the position vector of the point
ofgclosest to the origin of the underlying coordinate frame.
Thederivatives ofg are readily obtained:
d
dtg _g _g e _g0
kn kn e k0n kn0
d2
dt2 ^g
gg e
g0
^
k
2^g
_
k^n
^
kl^t
k2g _kn klt e2kk0g k2g0
_k0n _kn0 k0lt kl0t klt0 (18)
which determine the partial derivatives of the
parametrizationxt; u
@x
@t _g g0 g _g0 u _g;
@x
@ug
and
@2x
@t2 g g0 2 _g _g0 g g0 ug
@2x
@t@u _g kn; @2x
@u2 0
We study the derivatives at the points of a single generator,
say, at
t 0. To this end, we use the triplet g0; n0; t0as the
newcoordinate frame; now the striction point s0ofg0is the originof
the frame in question. We can then set
g0
1
0
0
264
375; n0
0
1
0
264
375; t0
0
0
1
264
375
g00 n00 t00 0
which yields
_g0
0
k
0
264
375 e
0
k0
0
264
375
g0
k2
_k
kl
2664
3775 e
2kk0_k0
k0l kl0
264
375
Fig. 2 Frenet frame g; n; t and striction curve of a
ruledsurface
5We identify an oriented lineG with its DUV g in a given
coordinate frame. Inthis sense, we speak of the line g.
6By virtue of the last condition, we exclude stationary
(singular) generators.
7For example, the dual part q 0 of the twist q equals the
velocity vector of theorigin s. Consequently, for the striction
point S of Fig. 3, we obtain tan r k=l,where angle r between g and
the striction curve is called the striction angle or,simply,
thestriction.
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-3
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
4/13
Therefore,
@x
@t0; u
0
ku
k0
2
4
3
5; @x
@u0; u
1
0
0
2
4
3
5 (19)
and
@2x
@t2 0; u
k2u
k0l kl0 _ku
_k0 klu
26664
37775
@2x
@t@u0; u
0
k
0
2664
3775; @
2x
@u2 0;u
0
0
0
2664
3775
(20)
The vector product b @x=@t @x=@u is a normal vector ofthe ruled
surface, provided the surface point is regular, which
meansb 60. The coordinates
b0;u 0
k0ku
24
35 (21)
reveal that at generators with kk06 0, the angle w between
thecentral normal vectorb0; 0 knand the normal vectorb0; u,depicted
in Fig.3, satisfies the equation
tan wku
k0
u
d with d
k0
k (22)
The ratio d is called the distribution parameter. This is a
geo-metric invariant, i.e., indifferent to surface
parametrization.
Moreover, Generators with k0 0 and hence d 0 are torsal. Here,
all
points with u60 have the same tangent plane, which isorthogonal
to T. The striction point (u 0) is singularbecauseb0; 0 0.
Cylindrical generators are characterized by _g 0 or k 0.Here,
all points are possible striction points. These generatorsoccur
whend ! 1.
When a parametrization of the Frenet frame is given, the
originis automatically a striction pointalso in the case of
cylindricalgenerators. In the case of an isolated cylindrical
generator, i.e., alocal zero of the function kt, the origin is the
limit of the stric-tion point when neighboring generatorsgt tend to
g0.
4 Two Ruled Surfaces With Line Contact
For our study on cycloid gearing, we need some results
con-cerning the Disteli axes g
of a ruled surface. According to
Eq.(16), q xg is the twist and thereforeg the instant screwaxis
of the moving Frenet frame. From Eqs.(16)and(18), the fol-lowing
relation is obtained:
_g g kn k2
g _kn kl t k
2xg
(23)
The dual angle c c ec0 between the generator g and
thecorresponding Disteli axisg satisfies
cot cl
k) cot c
l
k and c0
kl0 k0l
k2 l2(24)
a consequence of the two standard products
g g cos cl
x and g g sin cn
k
xn
and of the dual extension of an analytic real function f(t),
namely,ft ft et0 ft et0_ft, which yields
cotc cotc ec01 cot2c
The dual angle between the moving^gt and the fixed
^g
0 is sta-tionary of second-order8 att 0[8]. Due to the spherical
analogy,cotc can be called the dual (geodesic) curvature of the
ruled sur-face. We have, further,
LEMMA2. If two ruled surfaces are in contact at all points of
acommon generator and if they share the corresponding Frenetframe
and the Disteli axis, then their dual coefficients in the Fre-net
equations differ at the corresponding parameter values onlyby a
real factor c 60.
Proof.Let gtfort2 Jand ~g~tfor~t2 ~Jbe the dual
paramet-rizations of the two surfaces, such that for t ~t 0, the
corre-sponding Frenet frames coincide; hence, also their
strictionpoints coincide. The contact at all points of the
commongenerator implies, by virtue of Eq.(22), equal distribution
param-
eters d0 ~d0. Consequently, there is a real constant c60
with ~k ck and ~k0 ck0 at t ~t 0 and hence^~k0 c k0.
On the other hand, the coincidence of the Disteli axes
implies
cot ~c cotc ; hence, by virtue of Eq. (24), ~l=~k l=kand,
there-fore,~l0 c l0.
Without loss of generality, we can set c 1 because we canapply
the parameter transformation~t! t c ~tto the second sur-
face. This yields the new dual parametrizationgt ~gt=c,
andhence
d
d tg
1
c
d
d ~t~g ) k
1
c~k and l
1
c~l
By Lemma 2, this implies k0 k0 ; likewise, l0 l0.In analogy with
Eq.(17), the dual parametrization g t yields
the parametrization xt; u ~xt=c; u of the second ruled sur-
face, such that the tangent vectors
a x t0; u b xu0; u and a xt0; u b xu0; u (25)
of the two corresponding ruled surfaces are identical for alla;
b 2 R2 andu 2 R.
THEOREM2. Letgt and ~g~t be two twice-differentiable
ruledsurfaces, which, at t ~t 0, share the same Frenet frame,
thedistribution parameter d0 ~d0, and the Disteli axis. Then,the
surfaces have a G2-contact at the striction point of the com-
mon generator. Moreover, if ~k0 c k0 and ~l0 c l0,
Fig. 3 The tangent plane Tx at the point x of the generator g
isdefined by the distribution parameterd via tanw52u=d
8That is, up to its second t-derivative.
021015-4 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
5/13
then by Lemma 2 there is a G2-contact at all points of the
common
generatorg0 ~g 0 if and only if _~d0 c _d0.Proof. The
dual-vector function gt gt e g0t deter-
mines the real parametrizationxt; u of the ruled surface, as
givenin Eq.(17). The partial derivatives at t 0, as given in
Eq.(19),define the coefficients of the first fundamental formas
[11]
E 0; u @x
@t@x
@tk2u2 k20
F 0; u
@x
@t
@x
@u 0; G 0; u
@x
@u
@x
@u 1
(26)
For the second surface, parametrized by t, we obtain the
analogcoefficients E; F; G with E0; u E0; u; F0; u F0; u,and G0; u
G0; u.
The second-order partial derivatives at t 0 are displayed
inEq.(20). Together with the normal vectorb of Eq.(21), the
coeffi-cients of the second fundamental form [11] at the points of
thegeneratort 0 are defined as
L 1
jjbjjb
@2x
@t2
1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik20
k
2u2q k0 k0l kl0 _kk0 k _k0
u k2l u2
h i
M 1
jjbjjb
@2x
@t@u
1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik20
k
2u2q kk0
N 1
jjbjjb
@2x
@u2 0 (27)
The analog coefficients L; M; N of the parametrization xt; uof
the second surface satisfy M0; u M0; u and N0; uN0; u. However, L0;
u L0; u holds if and only if eitheru 0 or
d k
d tk0 k
d k0
d t
t0
dk
dt k0 k
dk0
dt
t0
which is equivalent to
d
d td 0
1
k2
k d k0
d t
d k
d tk0
t0
1
k2 k
dk0
dt
dk
dtk0
t0
d
dtd 0
Because ofdt ~dt=c, we obtain _~d c _d.According to a standard
formula from differential geometry, for
the first surface the normal curvature of the tangent
vectora@x=@t b@x=@u60, i.e., the curvature of the orthogonal
sec-tion through this tangent is given by the quotient of the two
funda-mental forms [11], namely,
jnII a; b
I a; b La2 2Mab Nb2
Ea2 2Fab Gb2
Therefore, for our two given ruled surfaces the two
statementsbelow are equivalent:
(i) The two second fundamental forms have equal coefficientsat
the pointx0;u x0; u.
(ii) For all tangent vectors at this point, the normal
curvaturesare equal.
Statement (ii) characterizes the G2-contactof the two surfacesat
this point.
For our particular case of cycloid gearing, we use the
converseof Lemma 2 and Theorem 2:
THEOREM3. Letgt and ~g~t be two twice-differentiable
ruledsurfaces, which share the same Frenet frame and the
distributionparameterd0 ~d0< 1 at t ~t 0.
If, for t ~t 0, the spherical images are osculating and
thesurfaces have a G2-contact at the striction point, then the
surfacesshare the Disteli axis, too.
Proof.Let gt fort2 Jand ~g~t for~t2 ~Jbe the dual
paramet-rizations of the two surfaces such that for t ~t 0 the
corre-sponding Frenet frames coincide. Hence, also their striction
pointscoincide. According to the proof of Lemma 2, there is a real
con-
stant c60 with ^~k0 c k0. The osculation of the spherical
images implies
l 0
k 0
~l 0
~k 0 ; ) ~l 0 c l 0
provided k0 6 0. By virtue of Eqs. (26) and (27), the
coeffi-cients of the fundamental forms at the striction point (u
0)follow:
E0; 0 k20; F0; 0 0; G0; 0 1L0; 0 k0l kl0; M0; 0 k; N0; 0 0
(28)
By a suitable parameter substitution, as in the proof of Theorem
2,we can conclude that G2-contact at the striction point
implies
~L0; 0 c2
L0; 0, and hence
~k0~l ~k~l0 j~t0 c2k0l kl0jt0
From k0 6 0 follows ~l00 c l00. But ~k0 c k0 and
~l0 c l0imply that the two surfaces share the Disteli axis att
~t 0.
5 The Curvature of the Ruled Tooth Flanks
In the realm of gearing, we need two different Frenet
frames,
the frame f1; f2; f3 R1 for the axodes with the ISA f1
(seeFig.1) and the frameg1; g2; g3 for conjugate tooth flanks
U2;U3with g1 as the meshing line (see Fig.4). Let R5denote the
moving
Fig. 4 The triplet g1; g2; g3 is the Frenet frame for the
conju-gate tooth flanks U2 and U3. The corresponding Disteli axes
g
are defined by the spatial EulerSavary equation(36).
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-5
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
6/13
space attached to the foregoing frame. Then, R5=R2 and R5=R3are
the Frenet motions along U2and U3, respectively.
5.1 The Frenet Frame of the Axodes. Upon gear meshing,theFrenet
frame f1; f2; f3 of the axodes with f1 p32 remainsfixed to the
machine frame R1. The second axis f2 equals thespear9 e3 along the
common perpendicular of the gear axes p21and p31. In terms of the
basis e1; e2; e3, we obtain, fromEq.(3a)and Fig.1,
f1f2 f3 e1e2e3cosu 0 sinusinu 0 cosu
0 1 0
24 35 (29)
or, conversely,
e1e2e3 f1f2f3cosu sinu 0
0 0 1
sinu cosu 0
24
35
by simple transposition.The origin of the Frenet frame is the
striction point
S 0;0; u0of the axodes, the point of intersection between theISA
p32 and the common normal of p21 and p31. The motionof this frame
along the axode P2 R2 is the rotation R1=R2
about the axis p21 with the angular velocity x21. Therefore,p21
cosu af1 sinu af3 is the permanent Disteli axisof P2. From Eq. (1),
the corresponding Frenet equations (note
e3 f2) begin with
_f1 x21p21 f1 x21sinu a f2
x21sinu a eu0 a0cosu af2
which implies for the axode P2the distribution parameter10
d2 u0 a0cotu a
and the coefficients
k2 x21sinu a; l2 x21cosu a
The last equation follows from the third Frenet equation
(16),_f3 x21p21 f3, which confirms, for the dual angle c2between
the generator p32 f1 and the Disteli axis p21, from
Eq. (24), that c2 u a with cotc2 l2=k2 as the dual curva-ture
ofP2, provided thatk2 60.
The Frenet motion along the other axode, the
one-sheethyperboloid P3 R3, is the rotation R1=R3 about p31cosu af1
sinu af3, with the velocity x31. Here,c3 u a is the dual angle
between the generatorp32 f1 andthe Disteli axisp31. We obtain
forP3the distribution parameter
d3 u0 a0cotu a
and the coefficients
k3 x31sinu a; l3 x31cosu a
The conditiond2 d3, which can also be concluded from
Eq.(5),guarantees the line contact between P2 and P3, i.e., at
least G
1-contact at all points of the ISAp32[12].
In the Frenet equations of the AS P4 R4 with axis p41cosu bf1
sinu bf3 and dual velocity x41, weobtain the coefficients
k4 x41sinu b; l4 x41cosu b (30)
As a consequence, P4 has, by virtue of Eq.(22), the
distributionparameter
d4 h41 u0 b0cotu b
The equations d4 d3 d2 can be verified via Eqs. (4),(9),
and(12). The axis ofP4 makes, with all generators P4, the dual
anglec4 u b.
5.2 The Frenet Frame of the Tooth Flanks.According toTheorem 1,
any line g attached to the AS P4 traces conjugatetooth flanks U2
and U3 under the respective relative motionsR4=R2 and R4=R3 with
the AS P4 roll-sliding on the axodes P2and P3, respectively. The
motion R4=R2 is the composition ofR4=R1with the Frenet motion
R1=R2along P2[13,14].
We can set up the moving lineg as
g cos gf1 sin g cos nf2 sin n f3 (31)
This follows because the common perpendicular11 k between g
and the ISA f1 can be written as k sin nf2 cos nf3, as perFig.4.
The dual angles n and g can be seen as dual geographicallongitude
and colatitude, respectively.
The common perpendiculark is already the central normal n ofthe
tooth flanks. This follows because, for the trajectory of
gunderR4=R2, we obtain
_g x42f1 g x42sin g cos n f3 sin n f2 x42sin gk
Therefore, the Frenet frame g1 g; g2 n k; g3 tfor theconjugate
tooth flanks U2 and U3 has the initial pose
g1g2g3 f1 f2 f3cos g 0 sin g
sin g cos n sin n cos g cos nsin g sin n cos n cos g sin n
2
4
3
5(32)
or, conversely
f1 f2f3 g1g2g3cos g sin g cos n sin g sin n
0 sin n cos nsin g cos g cos n cos g sin n
264
375
(33)
Upon differentiation of _g x42f1 g and considering thatx42
const, the following relation is obtained:
g x42_f1 g f1 _g
During the motion R4=R2, the ISA f1 traces P2 with
angularvelocity x21. Therefore,
_f1 x21 p21 f1 x21sinu a f2
and hence
g x42x21sinu af2 g f1 x42f1 g
x42x21sinu af2 gx42f1 gf1 f1 f1 g9Spearis a line with a
direction, usually represented with an arrow indicating thepositive
direction.
10Leta,b denote the sem-iaxes of a one-sheet hyperboloid of
revolution, where b
is measured along the axis of rotation. Then, b equals the
absolute value of thedistribution parameter of the generators,
i.e.,jdj b.
11Under sin g 0, the moved line g is parallel to the ISA f1 and
a cylindricalgenerator of its trajectory. In this case, the common
perpendiculark is not unique.
021015-6 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
http://-/?-http://-/?-
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
7/13
By virtue of Eq.(33), we can express the first and second
deriva-tives ofg in the Frenet frame g1; g2; g3 as
_g _g1 x42f1 g x42 sin gg2g x42x42sin
2gg1 x21 sinu acos ncos gg2
x21sinu asin n x42sin gcos gg3
which, upon comparison with Eq. (18), yields the
instantaneousinvariants of the tooth flank U2 underg 60, i.e., g
not parallel to
the ISA^f1, as
kU2 x42 sin g
lU2 x21sin u a sin n
sin g x42cos g
(34)
The conjugate tooth flank U3 is the trajectory of line g
underthe composition R4=R3 of the helical motion R4=R1 of the AS
P4and the Frenet motion R1=R3along P3. We obtain,
_g x43f1 g
and
g x43_f1 g f1 _g
where
_f1 x31 p31 f1 x31sinu af2
In terms of the Frenet frameg1; g2; g3, we obtain, further
_g x43 sin gg2g x43x43sin
2gg1 x31 sinu acos ncos gg2
x31sinu asin n x43sin gcos gg3
The instantaneous invariants ofU3are
kU3 x43 sin g
lU3 x31sin u a sin n
sin g x43cos g
(35)
providedg 60.By virtue of Eq. (15), the invariants kU2 and
kU3 differ only bya real factor. This is, of course, a
consequence of theG1-contactalong g. The distribution parameter
along the instant meshingline is
dUkU2 0
kU2
kU30
kU3
x320sin g x32g0cos g
x32sin g
This confirms that all linesg that underR3=R2trace ruled
surfaceswith the same instant distribution parameterd constitute a
quad-
ratic line complex, i.e., the six (normalized) real coordinates
ofg g1; g2; g3 eg10; g20; g30 in Eq. (31)satisfy a homogene-ous
quadratic equation
x320 d x32g22 g
23 x32g2g20 g3g30 0
which includes, ford 0, the complex of tangent lines.12
We can set up the instant Disteli axis gU2
ofU2 in analogy toEq.(31), in light of Fig.4, as
gU2
cos g U2
f1 sin gU2
cos n f2 sin gU2
sin n f3
On the other hand, from Eq. (16), a dual multiple of gU2
equalsthe twist
q52 lU2 g1 kU2 g3
of the Frenet motion R5=R2 along U2. After expressing this
dualvector in the basis f1; f2; f3, the comparison of the
coefficientsoff1and f3results, from Eq.(6), in
cot gU2 cot g
lU2 cot g kU2
lU2 kU2 cot g cot g
x42
x21sin u a sin n
sin a b
sin u a sin u b
sin n
provided that sinn sin g60. Thus, we can verify the
spatialEulerSavary equation (see the Appendix)
cotg U2
cotg sin n cotc2 cotc4
cotu a cotu b(36)
for the motion R4=R2, which generates the tooth flank U2.In the
same way, we can confirm that, for the conjugate
tooth flank U3, the Frenet motion R5=R3 undergoes the twistq53
lU3 g1 kU3 g3and the Disteli axis becomes
gU3
cos g U3
f1 sin gU3
cos n f2 sin gU3
sin n f3
which satisfies
cot g U3
cot g sin n cot c3 cot c4
cotu a cotu b(37)
Upon subtraction of the two EulerSavary equations (36) and(37),
we obtain
cot g U2
cot g U3
sin n cotc2 cotc3
thereby proving the spatial version of a result which is well
knownin planar and spherical kinematics, namely,
THEOREM4. LetU2 andU3 be conjugate ruled gear-tooth flankswith
permanent line contact. Then, the Disteli axes g
U2
andgU3
ofthe instant meshing line satisfy the EulerSavary equation for
therelative motion R3=R2between the two gears.
6 A Spatial Analog of Involute Gearing
In planar cycloid gearing there are two auxiliary curves,namely,
two circles, which usually are laid out in a symmetric rel-ative
position with respect to the pole tangent. The same is true on
the sphere. However, when the auxiliary circles are specified
asgreat circles they become identical, coinciding with the
sphericalpole tangent t. The axis p41 of the great circle t is
orthogonal tothe ISAp32. The corresponding profiles are involutes
of the polo-des; in the mean pose, they have the pressure anglea 0
deg.
This is the particular case of involute gearing, where the
pitchcircles coincide with the base circles. These profiles
arenotgeo-metrically feasible because of one reason (see Fig. 5):
At themeshing point M on the instant pole tangent t, the profiles
haveeither
aG2-contact with mutual penetration, ora cusp, and, if gears are
external, the curves open toward oppo-site sides.12See Theorem 56
in Ref. [15].
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-7
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
8/13
We obtain the corresponding spatial version when we specifythe
axis p41 orthogonal to the ISA p32 on the Plucker conoid
(seeFig.1). This is the case analyzed below in detail, following a
pre-liminary study [16].
By virtue of Eqs. (4)(9), the representation p41 sin be1 cos
be2implies
13
b u p
2 ; b0 u0; u b
p
2 2eu0 (38)
Therefore,
sinu b 1 and cosu b 2eu0 (39)
From Eqs.(5),(10), and(12)follow, for our particular choice
x41 x21sinu a x31sinu a
h41 Rcos 2a cos2u (40)
The AS P4 is a skew orthogonal helicoid with axis p41
andpitchh41, the ISA p32 being its initial generator. The
invariants of
P4, by virtue of Eq.(30), are
k4 x41; l4 2eu0 x41 (41)
The dual angle between the generators ofP4and its axis is
c4 u b p
2 2eu0 with cot c4 l4=k4 2eu0
From Eq.(4a), the distance c40between axis and generators
van-ishes if and only ifu 0, i.e., ifx21 x31.
By Eq. (14), the generating motions R4=R2 and R4=R3 of the
tooth flanks U2 and U3 have the twists q42 x42f1 and
q43 x43f1, respectively; in our particular case, we have
x42 x21cosu a eu0 a0sinu ax43 x31cosu a eu0 a0sinu a
(42)
Hence,
x43 : x42 tanu a : tanu a
u0 a0 :u0 a0 (43)
6.1 The ISA as a Line of Regression.Analog to the planarand
spherical cases, in spatial cycloid gearing the ISAp32 is a
sin-gular generator of the two tooth flanks U2 and U3. All the
genera-tor points are uniplanar, the tangent planes along p32
beingequally distributed along a regular generator with
distribution pa-rameterd R cos2a. As revealed in Fig.6, the ISA I32
does notlook singular at all; it is the border line of the two
components,originating from two symmetrically placed ASs. However,
in ourparticular case the two ASs coincide with the skew helicoid
P4.The ISA is, in fact, a line of regression for both tooth flanks.
Inexternal gears, as depicted in Fig. 6, the two flanks open
towardopposite sides. Hence, when the ISA becomes the meshing
line,no transmission of forces can take place. Figure6 shows the
con-
jugate tooth flanks as wire-frames, the depicted thick lines
beingthe intersections of the flanks with planes perpendicular to
theISA.
6.2 G2-Contact at the Striction Point.Now a questionarises: What
corresponds in skew gears to the osculation of toothprofiles when
the pole tangentserves as auxiliary curve?
Figure7 shows an example14 where the meshing line g differsfrom
the ISA. But g is parallel to the ISA and intersects the
centraltangent of the axodes at right angles. This central tangent
passes
Fig. 5 Involute bevel gearing with the pole tangent as
auxiliarycurvea case which is geometrically unfeasible because
theconjugate profiles c2and c3always penetrate each other at
themeshing point Mi
Fig. 6 When the ISA coincides with the meshing lineg, the
sin-gular lines of the two flanks U2; U3 come together sharing
the
tangent plane at each point ofg, but the flanks open toward
op-posite sides
13One could also set b u p=2. However, this has no effect on the
AS. It onlyreverses the orientation ofp41and changes the signs
ofx41and x410.
14Data: 2a60:0 deg; 2a0 70:0 mm,x31 :x21 2 :3, and distance
betweenthe ISA and the initial meshing line g : SSg 35:0 mm.
021015-8 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
http://-/?-http://-/?-
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
9/13
through the striction point S of the axodes and is parallel to
theaxisp41 of the AS P4note
f3in Fig.1.The spatial EulerSavary equation (36) for the motion
R4=R2
recalled below
cot g cot g sin n x
kcot c2 cot c4
holds only under sin n60, but we can replace it by Eq. (A2)
inthe Appendix, namely,
k sin ncos g sin g sin g cos g x sin g sin g 0
Under the relation sin n 0, i.e., k f3 in Fig. 4, it is
apparentthat sin g 60 implies sin g 0. In other words, when g 6
p32intersects the striction tangent f3 of the axodes at right
angles, theDisteli axis g
coincides with the ISA. The same holds for themotion R4=R3,
which means that under this condition the twotooth flanks share the
instant Disteli axis. According to Theorem2, U2 and U3 are
underG
2-contact at the common striction pointSg. In Fig.7, the thick
lines, which are in contact at marked pointson the meshing lineg,
are level lines of the two flanks, i.e., inter-sections with planes
orthogonal to the ISA. The mean sectionshows the G2-contact at the
striction point Sg, which causes theinterpenetration.
The case of osculating cylindrical or spherical tooth flanks
is
misleading. In the true spatial version, there is noG
2
-contact at allother points ofg for one reason: According to
Theorem 2, in this
case the condition _~d0 c _d0 must be satisfied. However,
because of the permanent line contact the flanks have the
same
distribution parameter ~dt dt for each t2 J. This implies_~d0
_d0, but by Eqs. (34), (35) and (43), the constant c in
kU3 c kU2 is
c tanu a= tanu a u0 a0 :u0 a0 61
The different postures depicted in Fig.8reveal that there is
alsoa mutual penetration of the conjugate tooth flanks U2 and U3
atthe other postures. Since the surfaces share this curve of
intersection as well as the tangent planes at all points of the
mesh-ing line, there must be aG2-contact at the point where the
curveof intersection meets the meshing line. This point is close to
thestriction point; however, it must be different fromSg for the
fol-lowing reason.
If a G2-contact takes place at the striction point, then
byTheorem 3 the two gear-flanks must share the Disteli axis g
.
However, when we plug the pairg; gof lines into the
left-handside of the EulerSavary equation, it cannot happen that
under
sin n6 0 we obtain two different results on the right-hand
side,either cot c2 cot c4 for R4=R2, Eq. (36), or cot c3 cot c4
forR4=R3.
This can also be confirmed by studying the coefficients of
thefundamental forms for U2 and U3 at the striction point of
themeshing lines g. With respect to the machine frame R1, the
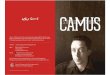
Fig. 7 Two conjugate flanksU2 and U3 with G2-contact at the
common striction point Sg. The meshing line g is here parallelto
the ISA and a cylindric generator of U2 and U3.
Fig. 8 Snapshots of the penetrating tooth flanks with
theirstriction curves upon meshing
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-9
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
10/13
meshing lines trace the helicoid P4. In the frame f1; f2; f3,
wecan set up
g
cos s
sin s024 35
e
h41s sin s
h41s cos s2u01 cos s24 35
The corresponding dual anglesn and g according to Fig.4are
n p 2eu0tan s
2 and g s eh41s
As in the proof of Theorem 3, we have to compare the
valueslisted in Eq.(28)forU2with those ofU3.
Equations(34)and(35),
together with Eq.(43), show that kU2 and kU3 differ by the
same
real factorc 61, as mentioned before. We find the same factorcin
the second terms oflU2 and lU3 ; however, the first terms are
equal. So, the necessary condition LU3 0; 0 c2LU2 0; 0 for a
G2-contact at the striction point is not satisfied, except in
thecase sin n0 0, which is only possible for u0 0. In this case,the
helicoid P4 is not skew, and its axis p41 equals the striction
tangent f3 of the axodes. Then, all meshing lines g intersect
thestriction tangent of the axodes at right angles.
6.3 A Spatial Analog of Octoidal Gears. In the plane aswell as
on the sphere, thegeneralized Camus Theorem states that,for any
curvec4attached to the auxiliary curvep4 R4, the enve-lopesc2and
c3under motions R4=R2and R4=R3, respectively, areconjugate tooth
profiles, both being conjugate to a virtual gearwith pitch
curvep4and the tooth profile c4.
In the particular planar case depicted in Fig. 9, the
auxiliarycurvep4is the pole tangenttand the attached curvec4is a
line. Inall its postures, the linec4shows the same inclination with
respectto the gear frame R1. At each pose, the enveloping point
Mofc4
is the pedal point with respect to the pole I32. The right
triangleenclosed by c4, p4, and the line I32M shows that the
angle15 ac
between the meshing normal and the polodep4 is constant,
whichleads to the case of involute gearing.
The foregoing statement does not hold in spherical geometrysince
for spherical triangles, the sum of the interior angles is
notconstant. This sum is always greater thanp, the amount by
whichthe sum exceeds p being proportional to the area of the
triangle.Therefore, we cannot conclude for the analog specification
inbevel gears that the angleacbetween the meshing normal and
thepolodes remains constant. Quite the contrary, the sum ofac
andthe constant anglebcbetween the great circlesc4and p4is
always
greater thanp=2 and increases with the spherical distance
betweenI32and c4, as shown in Fig.10. We obtain what is known
asoctoi-dal gears, as reported in Refs. [18] and [19].
Figure10shows octoidal bevel gears, the envelopes c2 and c3of
the great circle c4 under the respective motions R4=R2 andR4=R3 are
displayed at different postures c
12;; c
42 and c
13;; c
43.
The corresponding meshing points M1;;M4 trace the meshingline m.
Under the motion R4=R1, which is the rotation about theaxis p41,
the great circle c4 envelopes a pair of antipodal circleswith axis
p41. The complete meshing linem is thepedal curve ofthese circles
with respect to the relative pole I32. It consists of twoantipodal
curves of octoid shape [18].
The spatial analog of the generalized Camus Theorem [6] leadsto:
For any surface U4 attached to the AS P4, the envelopes U2and U3
under the respective relative motions R4=R2 and R4=R3are conjugate
tooth flanks. We choose again P4 as the skeworthogonal helicoid and
specify U4as a plane.
The envelope of a plane under any spatial motion is in
general
a torse, i.e., a developable ruled surface. In each pose, the
movingplane contacts its envelope along a line. Let the
one-parametricset of planes be represented by the linear equation
nt x dtwith twice-differentiable functions nt and d(t) for all t in
a realintervalJ. Then, the corresponding line of contact with the
enve-lope satisfies simultaneously the two equations below
[11,20,21]
nt x dt_nt x _dt
(44)
The cuspidal point of this generator satisfies also the third
equa-tionnt x dt.
Suppose the instant pose of the plane U4 R4 with respect tothe
frame R2 satisfies the equationn2 x2 d2. Then, the motion
Fig. 10 Octoidal bevel gears: The conjugate profilesc2and c3are
the envelopes of the great circle c4under the motions R4=R2and
R4=R3
Fig. 9 Planar version of the generalized Camus theorem in
theparticular case leading to involute gears
15Notation after [17], p. 274.
021015-10 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
11/13
R4=R2 with the twist q42 q42 e q420 x42f1, as given inEq.(14),
yields the derivatives
_n2 q42 n2 and _d2 q420 n2 (45)
Hence, the instant generator of the envelope U4 is represented,
byvirtue of Eq.(44), as the intersection of two perpendicular
planes.Analog results hold for the envelope ofU4underR4=R3.
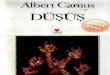
In this way, we obtain a pair of conjugate torses U2;U3
withpermanent line contact. In Fig. 11, one example is depicted
thatindicates that these flanks should work correctly. Contrary
tothe general case of Phillips involute gearing [22], contact isnot
punctual, but along a line. The thick curves in Fig. 11 arethe
intersections of the flanks with planes perpendicular to theinstant
meshing line, which is depicted as magenta double line.
Figure 12 shows snapshots of the conjugate torses
uponmeshing.16
7 Conclusions
Based on the Camus Theorem and on Martin Distelis work, weshowed
in this paper that the flanks of spatial cycloid gears can
besynthesized by means of an AS. In the first part, we studied
indual-vector notation the curvature of the tooth flanks.
Uponchoosing the skew orthogonal helicoid as AS, the tooth flanks
ofthe spatial equivalent of octoidal bevel gears are obtained.
Thefinal example with torses as tooth flanks looks promising but
stillneeds a detailed analysis: Interference avoidance, singularity
anal-ysis, pressure angle, and sliding velocity are still areas
warrantingfurther research.
Acknowledgment
The third author acknowledges the support received from
theNSERC, Canadas Natural Sciences and Engineering ResearchCouncil,
through Discovery Grant No. RGPIN/4532-2008 andfrom the McGill
University through a James McGillProfessorship.
Nomenclature
Rj=Rk motion of frame Rjwith respect to frame RkR1 fixed frame
(machine frame)
R2; R3 frames attached to the two wheels
Spur and Bevel Gears
c2,c3 conjugate tooth profiles ofR3=R2
Iij instant center of rotation ofRi=RjI21,I31 instant centers of
rotation of pinion and gear
with respect to R1p2,p3 pitch circles of the gears
p4 auxiliary curveR4 frame attached to the auxiliary curve
Spatial Case (Gears With Skew Axes)
e1; e2 DUVs representing thedirected bisectrixofI21and I31and
its intersecting perpendicular,as indicated in Fig.1
g;n; t Frenet frame of a ruled surface Ug
instant Disteli axis ofU
Fig. 11 Skew gears with torses as conjugate tooth flanksU2;U3and
permanent line contact
Fig. 12 Snapshots of the conjugate torses U2 and U3 uponmeshing
x31 : x21522: 1
16Data: 2a 56deg; 2a0 50 mm, x31 : x21 2 : 3. The initial pose
of theenveloping plane U4 R4 is defined with respect to the frame
f1; f2; f3 in thefollowing way: Its normal vector has the
geographical longitude 81:8 deg and thelatitude 11:9 deg, and U4
passes through the point0; 0; 47:3.
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-11
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
12/13
hij xij0=xij instant pitch ofRi=RjIij ISA ofRi=Rj
I21; I31 ISAs of pinion and gear with respect to R1I41 ISA
ofP4with respect to the machine frame
R1
pij unit vector parallel to the instant axis ofRi=Rj
pij0 moment of the axisIijwith respect to theorigin
pij pij epij0 DUV representingIij
qij xijpij twist ofRi=Rja a ea0 dual angle between p21and e1
b dual angle betweene1and p41c dual angle between the generatorg
ofU and
the corresponding Disteli axisg cot c dual
curvature of the generatorg ofUd instant distribution parameter
ofU
P2;P3 axodes of the relative motion R3=R2P4 AS, axode ofR4=R2
and R4=R3R4 frame attached to the AS P4u dual angle betweene1and
the ISA p32
U2;U3 conjugate tooth flanks ofR3=R2xij signed instant angular
velocity ofRi=Rj
xij0 signed instant translation velocity ofRi=Rjxij xij e xij0
instant dual velocity ofRi=Rj
x21,x31 angular velocities of pinion and gear,respectively2a
angle between gear axesI21and I31
2a0 distance between gear axesI21and I31
Appendix: The Spatial EulerSavary Equation
The spatial version of the EulerSavary equation dates back
toDisteli [10] and has since been discussed in the literature
[8,23].The discussion goes along the lines of Ref. [8], where this
equa-tion was first derived as the exact dual extension of the
sphericalversion in Ref. [24].
First, we compute the Disteli axis g of the ruled surface U,
which is traced by the directed line g under the spatial
motionR3=R2 with the twist q32 x32p32. To this end, we recall that
by
virtue of the Frenet equations(16)
_g g kn _
kn kkg l t k2k t lg k
2xg
(A1)
Hence, the vector product of the first and the second derivative
ofg is a dual multiple of the Disteli axis g
.Let P2 and P3 denote the fixed and the moving axode of the
relative motion R3=R2. At each instant, the Frenet frames of
theaxodes P2 and P3 for the instant axis p32 are coincident,
thus defining a framef1; f2; f3 R1 with f1 p32, as shown inFig.
4. Therefore, the motion R3=R2 arises when the Frenetmotion R1=R2
along the fixed axode is superimposed with theinverse R3=R1 of the
Frenet motion R1=R3 along the movingaxode U3. The twist ofR3=R2is
obtained as
q32 q12 q13 x32f1; where
q1i li f1 kif3 for i 2; 3
Hence, q32 l2 l3 f1 and k2 k3, where we have recalledthat the
dual curvature of the axode Piis given by cotci li=ki.
We follow the notation explained in Fig. 4 and use the dual
anglesn n en0 and g g eg0 for defining the relative posi-tion of
the moving line g with respect to the Frenet frame
f1; f2; f3 of the axodes. Further, from Eq.(31)
g cos gf1 sin gh with h cos n f2 sin n f3
the derivative ofg for the motion R3=R2is derived below
_g q32 g x32 f1 g x32sin g f1 h
x32sin g cos n f3 sin n f2
which proves that the central normal ofU coincides with the
com-mon perpendiculark to g and the ISAf1. Also, the Disteli axis
g
intersects k at right angles, as shown in Fig. 4. Now the
secondderivative follows:
g _x32 f1 g x32 _f1 g x32f1 _g
where the motion of f1 with respect to R2 along the fixed
axodeP2 leads to
_f1 k2f2
Hence,
g _x32 f1 g x32k2 cos g f3 sin n sin gf1
x232sin g cos nf2 sin nf3
Therefore,
_g g x232sin g cos nf3 sin n f2
k2cos gf3 sin nsin g f1
x32sin g cos nf2 sin n f3
x232sin gk2sin ncos g x32sin g f1k2sin nsin gh
By virtue of Eq. (A1), this product equals a dual multiple of
theDisteli axisg
, which can be expressed as (see Fig.4)
g cos gf1 sin g
h
Hence, if x32sin g60, we obtain, upon comparison
ofcoefficients
k2sin ncos gsin g sin gcos g x32sin gsin g
0 (A2)
Under the additional condition k2sin g 6 0, we may divide
the
equation above by k2sin gsin g. Moreover, we can replace
x32= k2 by l2 l3= k2 and express this, by virtue of k2 k3,in
terms of the dual curvature of the axodes, thereby obtaining
thedesired result
cot g cot g sin nx32
k2cot c 2 cot c 3
which is the spatial EulerSavary equation.
References[1] Blaschke, W., 1960, Kinematik und Quaternionen,
VEB Deutscher Verlag der
Wissenschaften, Berlin.
[2] Veldkamp, G. R., 1976, On the Use of Dual Number, Vectors
and Matrices inInstantaneous Spatial Kinematics,Mech. Mach.
Theory,11(2), pp. 141156.
[3] Figliolini, G., Stachel, H., and Angeles, J., 2007, A New
Look at the Ball-Disteli Diagram and Its Relevance to Spatial
Gearing, Mech. Mach. Theory,42(10), pp. 13621375.
[4] Disteli, M., 1911, Uber die Verzahnung der Hyperboloidrader
mit geradlini-gem Eingriff, Z. Math. Phys.,59(3), pp. 244298.
[5] Figliolini, G., Stachel, H., and Angeles, J., 2013, On the
Synthesis of SpatialCycloidal Gears,Meccanica,48(5), pp.
12391249.
[6] Figliolini, G., Stachel, H., and Angeles, J., 2013, On
Martin Distelis SpatialCycloidal Gearing,Mech. Mach. Theory,60(1),
pp. 7389.
021015-12 / Vol. 8, APRIL 2016 Transactions of the ASME
wnloaded From:
http://mechanismsrobotics.asmedigitalcollection.asme.org/ on
02/04/2016 Terms of Use:
http://www.asme.org/about-asme/terms-of-use
http://dx.doi.org/10.1016/0094-114X(76)90006-9http://dx.doi.org/10.1016/j.mechmachtheory.2006.10.005http://dx.doi.org/10.1007/s11012-012-9664-9http://dx.doi.org/10.1016/j.mechmachtheory.2012.09.005http://dx.doi.org/10.1016/j.mechmachtheory.2012.09.005http://dx.doi.org/10.1007/s11012-012-9664-9http://dx.doi.org/10.1016/j.mechmachtheory.2006.10.005http://dx.doi.org/10.1016/0094-114X(76)90006-9
-
7/25/2019 A Spatial Version of Octoidal Gears Via the
Generalized Camus Theorem
13/13
[7] Pottmann, H., and Wallner, J., 2001,Computational Line
Geometry, Springer-Verlag, Berlin.
[8] Stachel, H., 2000, Instantaneous Spatial Kinematics and the
Invariants of theAxodes, Ball 2000 Symposium, Cambridge, UK, Paper
No. 23, pp. 114.
[9] Angeles, J., 2014, Fundamentals of Robotic Mechanical
Systems: Theory,Methods, Algorithms, 4th ed., Springer, New
York.
[10] Disteli, M., 1914, Uber das Analogon der Savaryschen Formel
und Konstruk-tion in der kinematischen Geometrie des Raumes, Z.
Math. Phys., 62(3),pp. 261309.
[11] Do Carmo, M. P., 1976,Differential Geometry of Curves and
Surfaces, PrenticeHall, Englewood Cliffs, NJ.
[12] Wang, D. L., Liu, J., and Xiao, D. Z., 2000, Geometrical
Characteristics ofSome Typical Constraints,Mech. Mach.
Theory,35(10), pp. 14131430.
[13] Dong, H., Ting, K.-L., Yu, B., Liu, J., and Wang, D., 2012,
Differential Con-tact Path and Conjugate Properties of Planar
Gearing Transmission,ASME J.Mech. Des.,134(6), p. 061010.
[14] Yu, B., and Ting, K.-L., 2013, Manifold Conjugation and
Discrete GearDesign,ASMEPaper No. DETC2013-13401.
[15] Muller, H. R., 1963, Kinematik, Sammlung Goschen, Walter de
Gruyter,Berlin.
[16] Figliolini, G., Stachel, H., and Angeles, J., 2015, The
Role of the OrthogonalHelicoid in the Generation of the Tooth
Flanks of Involute-Gear Pairs WithSkew Axes,ASME J. Mech.
Rob.,7(1), p. 011003.
[17] Litvin, F. L., and Fuentes, A., 2004, Gear Geometry and
Applied Theory,Cambridge University Press, Cambridge, UK.
[18] Figliolini, G., and Angeles, J., 2005, Algorithms for
Involute and OctoidalBevel-Gear Generation,ASME J. Mech.
Des.,127(4), pp. 664672.
[19] Wang, D., and Wang, W., 2015, Kinematic Differential
Geometry and Saddle
Synthesis of Linkages, Wiley, Singapore, Singapore.[20] Ting,
K.-L., and Soni, A. H., 1983, Instantaneous Kinematics of a Plane
in
Space Motion,ASME J. Mech. Des.,105(3), pp. 552559.[21] Wang,
W., and Wang, D., 2014, Curvature Theory of the Envelope Curve
in
Two-Dimension and Envelope Surface in Three-Dimension Motion,
ASME J.
Mech. Rob.,7(3), p. 031019.[22] Phillips, J., 2003, General
Spatial Involute Gearing, Springer-Verlag, New
York.[23] Dooner, D. B., and Griffis, M. W., 2007, On Spatial
Euler-Savary Equations
for Envelopes,ASME J. Mech. Des.,129(8), pp. 865875.[24] Muller,
H. R., 1962, Spharische Kinematik, VEB Deutscher Verlag der
Wissenschaften, Berlin.
Journal of Mechanisms and Robotics APRIL 2016, Vol. 8 /
021015-13
http://dx.doi.org/10.1007/978-3-319-01851-5http://dx.doi.org/10.1007/978-3-319-01851-5http://dx.doi.org/10.1016/S0094-114X(99)00077-4http://dx.doi.org/10.1115/1.4006654http://dx.doi.org/10.1115/1.4006654http://dx.doi.org/10.1115/DETC2013-13401http://dx.doi.org/10.1115/1.4029287http://dx.doi.org/10.1017/CBO9780511547126http://dx.doi.org/10.1115/1.1900147http://dx.doi.org/10.1002/9781118255056http://dx.doi.org/10.1002/9781118255056http://dx.doi.org/10.1115/1.3267394http://dx.doi.org/10.1115/1.3267394http://dx.doi.org/10.1115/1.4029185http://dx.doi.org/10.1115/1.4029185http://dx.doi.org/10.1007/978-3-662-05302-7http://dx.doi.org/10.1115/1.2735339http://dx.doi.org/10.1115/1.2735339http://dx.doi.org/10.1115/1.2735339http://dx.doi.org/10.1007/978-3-662-05302-7http://dx.doi.org/10.1115/1.4029185http://dx.doi.org/10.1115/1.4029185http://dx.doi.org/10.1115/1.3267394http://dx.doi.org/10.1002/9781118255056http://dx.doi.org/10.1002/9781118255056http://dx.doi.org/10.1115/1.1900147http://dx.doi.org/10.1017/CBO9780511547126http://dx.doi.org/10.1115/1.4029287http://dx.doi.org/10.1115/DETC2013-13401http://dx.doi.org/10.1115/1.4006654http://dx.doi.org/10.1115/1.4006654http://dx.doi.org/10.1016/S0094-114X(99)00077-4http://dx.doi.org/10.1007/978-3-319-01851-5http://dx.doi.org/10.1007/978-3-319-01851-5