Embed Size (px)
Citation preview

A Small, Low Cost, Hyperspectral Imaging FTIR Sensor Design for Standoff Detection Applications
Thomas Gruber, Jr.*a, Brad Moorea, Brian Terchaa, and Ryan Bowea
aMESH,Inc., 114 Barnsley Rd., Oxford, PA, USA 19363
ABSTRACT
Hyperspectral imaging (HSI) sensors allow standoff visualization and identification of chemical vapor plumes; however, currently available COTS sensors, which produce very high quality data, are expensive(>$750k), large(>100 L), and massive( >30 kg). Man-portable and UAV based hyperspectral sensor applications require smaller and lighter weight designs. An approach using new technologies, including a microbolometer IR camera, a piezo-electric linear actuator, a FPGA/LAN board, and an embedded multi-core CPU, is presented that seeks to produce similar quality hyperspectral data at a 10x cost reduction, 3x size reduction (<30 L), and a 3x mass reduction (<10 kg for optics and electronics). The design challenges, system overview, and initial performance data measurements from the new spectrometer designs are presented. An overview of the data cube signal processing, including spatial co-adding, re-sampling of the interferogram data point spacing, phase correction, and detection algorithms, is presented. The spectrometer optical design was also tested by temporarily installing a single pixel MCT detector in order to make spectral resolution comparisons with a traditional FTIR spectrometer.
Keywords: hyperspectral, microbolometer, FTIR, standoff, passive IR
1. INTRODUCTION
Michelson FTIR type hyperspectral imaging (HSI) sensors allow standoff visualization and identification of chemical vapor plumes; however, currently available COTS sensors are expensive (>$750k), large (>100L), and massive (>30kg). MESH's goal is to achieve a 10x cost reduction, 3x size reduction (<30L), and a 3x mass reduction (<10kg for optics and electronics) in order to support fixed site multi-sensor network applications, dismounted/man-portable sensing applications, and UAV/gimbal based sensing applications, which require a low cost and/or smaller size HSI sensor. The following recently available COTS components enable the development of a low cost HSI sensor:
• Microbolometer IR Detectors - these are un-cooled, low noise (<50mK NEDT), moderate frame rate (30 to 60Hz), high spatial resolution (~1mrad or ~0.06deg), IR detector arrays or complete integrated IR camera detector/lens modules. These thermal detectors are 10x to 50x less expensive than Mercury Cadmium Telluride (MCT) photo-voltaic detector arrays with cryo-coolers. The microbolometer is a slower detector (e.g., ~9ms time constant for microbolometer v. ~3µs for a MCT); however, the NEDT is only a factor 2.5x worse than that of a typical MCT array (e.g., ~20mK NEDT).
• Piezo-Electric Linear Stages for the Spectrometer Moving Mirror - these are linear actuators with integrated linear bearings, position feedback encoders, and small constant velocity motion control circuit boards. Although these stages are comparable in cost to the parts used in constructing a more common spring or 4-bar linkage based linear bearing (for a spectrometer moving mirror) and a HeNe laser based position feedback system, the piezo-electric stages are smaller, less complex, and require less assembly labor in building the spectrometer.
• High Speed Data Acquisition and Signal Processing Electronics - there are now small FPGA boards with integrated Gbit/sec LAN chips for building fast data acquisition systems for transferring detector array images. Additionally, multi-core embedded CPUs are available to make HSI data cube processing possible with low power, low cost, and small size electronics stacks. These electronics replace "desktop computer size" electronics boxes that were previously required for data cube acquisition and processing.
*[email protected]; phone 1 610 932-7754; fax 1 610 932-3413; meshoxford.com

The development approach has been to derive component requirements (for these new COTS technologies) from HSI overall requirements and design calculations, and then to select the specific components after reviewing the available options from several vendors.
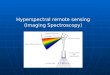
A HSI sensor produces images for a range of spectral bands, as depicted in Figure 1, where a sequence of time domain images (that are collected as a function of Michelson FTIR spectrometer moving mirror position) is transformed to spectral radiance images. Our current requirements call for 4 to 8cm-1 spectral resolution, 800 to 1200cm-1 spectral range, noise equivalent spectral radiance (NESR) of 10 to 30nW/(cm2 sr cm-1) @ less than 10mrad x 10mrad of spatial co-adding, a pixel IFOV of less than 2mrad (0.12deg), a FOV of 15deg x 15deg, data products every 30sec to 2min, and a size of less than 30L (1ft3).
Two HSI sensor designs have been under development - one for a UAV gimbal application and one for a fixed site application. A prototype gimbal integrated HSI sensor was constructed and tested. The HSI design, signal processing, and initial performance data are discussed in sections 2, 3, and 4-5, respectively. To date, significant progress has been made on the HSI sensor with only 1.5 man-years of design/development effort via SBIRs (Phase I and Phase II, CBD09-108) and a separate UAV sensor prototype development project. The MESH HSI sensor is called "Firefly".
Figure 1. HSI sensors collect an interferogram "data cube" made up of a sequence of time domain images, which are then Fourier transformed to create a sequence of frequency domain images.
2. HSI DESIGN FOR GIMBAL AND FIXED SITE VARIANTS
An overview of the design work involved in developing the HSI sensor is presented including design calculations, ray tracing, signal modeling, system integration, and software design. The initial HSI sensor design was developed around a FLIR Tau 320 microbolometer IR camera with a 324 x 256 array operating at a 30Hz frame rate as the detector. The Tau has a small size, low cost, and low NEDT (~50mK). An 18 deg by 14 deg FOV lens was selected for the Tau. 2.1 Optical Design Calculations
The optical design calculations included:
Checking the maximum possible spectral resolution as a function of pixel IFOV - since the IFOV is small at less than 1mrad (0.06deg), there is no problem in achieving 4cm-1 spectral resolution (if the peak wavenumber is 1500cm-1, then up to a 6deg IFOV is allowed)
Choosing the spectrometer mirror diameter - if the diameter is too small, then the FOV will be clipped and if the spectrometer mirror diameter is too large, the mirror tilt error requirement becomes too difficult. The mirror diameter v. maximum spectrometer FOV is shown in Figure 2. A 38mm mirror diameter was chosen.
Determining the sampling requirements for the interferogram including sampling interval and maximum allowed sampling position error - these calculations along with mirror tilt drove the piezo-electric linear stage encoder and bearing requirements. A random error of up to +/-25nm in each mirror sample position can be tolerated. A sample spacing 1750nm is used at a 50µm/sec mirror velocity to match a near 30Hz frame rate.
Optical throughput and SNR calculations - the HSI sensor throughput is about ~1000x lower than a typical single pixel, 0.5deg FOV FTIR spectrometer. SNR is directly proportional to optical throughput; however, the longer integration time of the microbolometer IR camera (i.e., 30Hz frame rate) compensates somewhat for the

reduced throughput. Various methods predicted single pixel spectrum SNR values of 100 to 300 (v. 1500 for a typical single pixel FTIR spectrometer). Note that spatial co-adding is used to increase the HSI SNR; however, detection results can still be overlaid on the high spatial resolution imagery.
Off-axis pixel wavenumber correction - the off-axis pixels measure a longer path through the spectrometer than the near center pixels. This effect must be corrected by re-sampling the off-axis interferograms or by interpolating the spectra to a corrected wavenumber scale.
Many of these calculation equations were obtained from a commonly used FTIR spectrometer reference text[1].
Figure 2. Maximum possible spectrometer FOV as a function of fixed and moving mirror diameter assuming the Tau camera lens diameter as the detector aperture size.
2.2 Optical Ray Tracing
Once the mirror and zinc selenide beam splitter / compensator optical component diameters were determined, a Zemax software model was constructed for the purpose of finding the optimal component locations to support both single and double sided interferogram data cube collection. The optical model includes the Tau IR camera lens and detector array, so that individual pixel location performance could be checked. The final optical design was exported from Zemax to 3D mechanical CAD software to continue the system design.
Figure 3. Zemax ray tracing software was used to determine beam splitter / compensator and mirror locations, and to check selected pixel responses on the detector array.

2.3 Signal Models
To further investigate and simulate the design performance, a transient response signal model was constructed with these elements:
Detector pixel energy balance consisting of pixel thermal mass and heat transfer terms, as shown in Figure 4. Several references were used to estimate the thermal mass and conduction loss for the microbolometer[2,3]. A differential equation formed with these terms (as shown in Figure 4) is the core of the transient response model.
The scene radiance term includes the "DC level" (basic scene temperature) and the "modulated radiance" (interferogram effect). The interferogram model includes an adjustable random sampling error effect and random NEDT error effect.
The model was used to better understand that:
The detector response (i.e., measured interferogram) is slightly lagging the true interferogram signal due to the time constant effect - there is a trade-off between the spectrometer moving mirror velocity choice in terms of data cube acquisition time v. maximizing the interferogram signal level.
Only the net transferred radiance can be modulated to create the interferogram signal - although un-cooled detectors are fine for measuring scene images even if the detector is the same temperature as the scene, this is not true for measuring inteferograms. There must be a temperature difference between the detector and the scene in order to create the interferogram signal.
Figure 4. Diagram showing heat transfer terms that effect a microbolometer pixel temperature including scene radiance, self radiance, and conduction to the substrate (note - there is no convection because the array is contained within an evacuated package).
2.4 Selected COTS Components
The following COTS (or modified COTS) components were selected:
FLIR Tau 320 IR camera with microbolometer detector array (as referenced above)
Nanomotion custom piezo-electric stage with integrated encoder and position/velocity control board
OrangeTree FPGA with Gb/sec LAN board for creating the IR camera data collection interface
ADL dual core CPU board in a PC104 form factor with Windows 7, 64bit
2.5 Mechanical Design
The mechanical design challenges included:
Design of a rugged, adjustable kinematic mirror mount that can withstand shocks over 50g via a high pre-load

Integration of the piezo-electric stage with the optical core
Detector temperature control (either heating or cooling)
Integration of the HSI sensor optics/custom mechanical parts within a Cloud Cap T2 gimbal - the approach was to remove some of the gimbal payload compartment's core structure and replace it with a "U-bracket" as shown in Figure 5. This bracket allowed the HSI sensor assembly to slide into the gimbal while supporting the payload compartment. The entire optical assembly fits within a 140mm (5.5in) diameter x 125mm (4.9in) wide space.
Design of a stand-alone fixed site version of the HSI spectrometer, which is also shown in Figure 5
Figure 5. Mechanical design to integrate the HSI sensor into a Cloud Cap T2 gimbal (left) and a fixed site version concept (right).
2.6 Calibration Blackbody
The HSI sensor uses a blackbody calibration source consisting of a copper substrate coated with high emissivity carbon fiber and connected to a thermoelectric (TE) module and pin-fin/fan heat sink assembly. The TE is controlled by a power efficient variable DCDC converter circuit design. A two point calibration is currently performed on the HSI sensor.
2.7 Gimbal / HSI Sensor System Integration
The gimbal / HSI sensor assembly is shown in Figure 6. The electronics stack and embedded software for running the sensor are located adjacent to the gimbal structure. The embedded Windows 7 software includes modules for gimbal control (geo-pointing, etc.), blackbody calibration, and HSI sensor data collection/processing, as shown in Figure 7.
Figure 6. HSI sensor integration into the gimbal - COTS parts (right), optical core (center) and gimbal assembly with thin fiberglass payload enclosure over the optical core (left).

Figure 7. Windows 7 embedded application with remotely viewable GUIs shown for the various sub-systems.
3. HSI DATACUBE SIGNAL PROCESSING
MESH's 20 years of passive standoff chemical sensor experience was leveraged to create the HSI sensor signal processing software consisting of data cube preprocessing (to create calibrated radiance spectra), spectral pattern recognition algorithm (to detect chemical vapors), and "blob" object detection algorithm[4] (to recognize cloud like objects within spectral images).
3.1 Data Cube Preprocessing
The data cube preprocessing includes the following steps:
Removal of the DC level from all interferograms
Spatial co-adding at a desired level of between 1x1 to 10x10 pixels
Re-sampling of the interferograms for off-axis pixel correction
Forman phase correction[1] using the FFTW transform[5]
3.2 Spectral Pattern Recognition for Chemical Detection
The MESH15 algorithm is being used for chemical detection and identification. The performance of this algorithm has been characterized in many field tests over the last 10 years and was most recently characterized in 2009 using two different simulant chemicals, as shown in Figure 8. Note that the figure shows that a smaller IFOV of 0.5deg x 0.5deg increases the detection range and probability of detection because of the improved fill factor (i.e., more of the pixel IFOV is filled by the vapor cloud signature) as compared to a larger 1.5deg x 1.5deg IFOV.
Figure 8. MESH15 spectral pattern recognition algorithm detection performance (i.e., probability of alarm percentage) for triethyl phosphate (TEP) vapor clouds and glacial acetic acid (AA) vapor clouds as a function of standoff range for over 50 separate detection test trials conducted in 2009 using a MCAD sensor.

The HSI sensor signal processing was developed and tested using synthetic data sets generated by the model discussed in section 2.3. An example on-peak spectral image and preprocessed spectrum are shown in Figure 9 for a simulated R134a cloud located at pixel index 100,100 (dark circle in image of Figure 9).
Figure 9. Sample spectral image (left) at an on-peak wavenumber location of 1188cm-1 and sample preprocessed spectrum for R134a (right). The peak CL at the cloud center is 1000mg/m2 and the CL drops off with a cosine profile towards the cloud edge. The cloud radius is 50 pixels. The delta T for the gas cloud v. background is 5K.
3.3 Cloud Object Detection within Image Data
MESH has recently developed a "blob" detection algorithm for finding and tracking aerosol clouds in IR imagery collected from autonomous IR camera pods[4]. This algorithm is also being used to automatically recognize vapor clouds in the HSI sensor data.
4. INITIAL PERFORMANCE TESTING
Selected preliminary data from the gimbal integrated HSI sensor are presented. The data includes sample interferogram data and NESR results. Although the prototype sensor comes close to the desired NESR performance at ~50nW/(cm2 sr cm-1) with spatial co-adding, MESH has determined that the FLIR Tau 320 IR camera is not sensitive enough and therefore work is in progress to integrate a 3x more sensitive microbolometer from another vendor.
4.1 Interferogram Data
Sample interferogram images are shown in Figures 10 and 11. The entire 18deg x 14deg FOV gets through the spectrometer optics, as indicated by the sample interferogram image shown in Figure 10. An example near centerburst image is shown in Figure 11, where a lower temperature zone appears near the image center. A pattern of colder or warmer temperature alternates from center to edge and back again as a function of pixel location (i.e., more or less off-axis) and as a function of scene to detector temperature difference for the near centerburst portion of the interferogram image sequence. This effect is expected from theory, predicted by the signal model, and observed in real data.
Figure 10. Integrated gimbal/HSI sensor used for data collection (left), sample interferogram image (center) taken through the gimbal optics, and sample interferogram for a pixel (right).

Figure 11. Near centerburst interferogram image showing the modulation of the radiance from the center to the edge of the image. The image contains a parking lot, a person, a chain link fence, a farm silo structure, and a partly cloudy sky moving from foreground to background.
4.2 NESR Results
The initial NESR results for the integrated gimbal/HSI sensor are shown in Figure 12 for various levels of spatial co-adding. The spatial co-adding level of 9x9 pixels for the center portion of the array (half of the total number of pixels) shows a NESR level of less than 50nW/(cm2 sr cm-1). During the sensor testing it was determined that:
The Tau IR camera does not have sufficient A/D granularity for the wing portion of the interferogram (i.e., the away from the centerburst region needs more A/D bits) and this reduces the effectiveness of co-adding. A better microbolometer has been identified with a higher A/D resolution and a 3x higher gain.
The typical best case centerburst signal level is 500 A/D counts peak to peak. The signal model predicted ~2000 A/D counts of signal for the centerburst, and the discrepancy between the predicted and observed performance is partially explained by the fact that the Tau only uses half of its 14bit A/D dynamic range, which was unexpected (i.e., actual sensitivity is ~30 A/D counts per K of scene temperature instead of predicted 214bits/200K scene range = 80 A/D counts per K).
The optical alignment adjustment needs to be finer - although the alignment is stable, a finer adjustment would help in achieving the best fixed mirror alignment. An improved kinematic adjustment design is in progress.
Figure 12. NESR results for various spatial co-adding levels for the integrated gimbal / HSI sensor.

5. OPTICAL DESIGN TESTING WITH A MCT DETECTOR
While waiting for the more sensitive microbolometer detector array to be delivered to MESH, work was done to test the spectral resolution performance by using a single pixel MCT detector (which can be digitized at sufficient A/D resolution to determine spectral resolution performance). The initial results indicate that "laser-less" (i.e., piezo-electric linear stage/encoder based) FTIR spectrometers can work.
5.1 MCT Integration
The gimbal HSI sensor optical core was removed from the gimbal and integrated with a single pixel MCT detector as shown in Figure 13. A custom designed pre-amp with an anti-alias filter and a COTS 16 bit A/D were used for the data acquisition system. Instead of operating at a 50µm/sec, the mirror was driven at a 1cm/sec velocity for the faster response MCT detector (i.e., the single pixel MCT time constant is 0.5µs compared to 9ms for the typical microbolometer detector).
Figure 13. MCT detector/Dewar and gimbal prototype optical core installed on an aluminum base plate to create a "piezo-electric mirror driven, single pixel MCT detector" FTIR spectrometer. A pre-amp with an integrated anti-aliasing filter was designed for the required bandwidth for a 1cm/sec mirror velocity.
5.2 MCT Results
Polystyrene (PS) spectra were collected with the MCT setup as shown in Figure 14. These spectra were used to calculate the HSI sensor transmission spectrum shown in Figure 15. Note that the PS peak locations and shapes measured with the HSI sensor FTIR spectrometer agree with the MCAD spectrometer, which is based on a BLOCK model 100 FTIR (which has a standard "voice coil" type mirror drive and a HeNe reference laser). Both spectrometers were configured to collect 4cm-1 resolution interferogram data. The MCAD PS spectra were collected under similar blackbody temperature conditions (i.e., same delta T) in 2009. The PS film used for the spectrometer measurements was taken from the same role of PS film produced by the Goodfellow materials company.

Figure 14. Spectra collected with the HSI sensor optical core with the MCT detector, including a warm blackbody background with and without polystyrene film, and an ambient blackbody.
Figure 15. Comparison of PS transmission spectra collected with the HSI sensor optics and the MCAD sensor.
6. CONCLUSION
This HSI sensor development work shows that:
It is possible to build a working spectrometer from a low cost piezo-electric linear stage/encoder
It is possible to collect hyperspectral data cubes using a microbolometer detector; however, a more sensitive detector is required than the initially selected Tau 320 IR camera.
It is possible to make a very small HSI sensor that can be integrated into a gimbal
The next step will be integrating and testing the more sensitive microbolometer detector with the HSI sensor optics.
REFERENCES
[1] Griffiths, P. R. and de Haseth, J. A., [Fourier Transform Infrared Spectrometry], John Wiley & Sons, New York & Boston, (1986).
[2] Cole, B. E., Higashi, R. E., and Wood, R. A., "Monolithic Two-Dimensional Arrays of Micromachined Microstructures for Infrared Applications," Proc. of IEEE, Vol.86, No.8, (1998).
[3] Niklaus, F., Vieider, C., and Jakobsen, H., "MEMS-Based Uncooled Infrared Bolometer Arrays - A Review," Proc. SPIE 6836, (2007).
[4] Fauth, R. A., Powell, C. E., Gruber Jr., T. C., Clapp, D., "Automated Recognition and Tracking of Aerosol Threat Plumes with an IR Camera Pod," Proc. SPIE 8358, (2012).
[5] http://www.fftw.org/