-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
1/30
A shear experiment over the Natih field in Oman:pilot seismic
and borehole data1
J.H. Hake,2
E.C.A. Gevers,2
C.M. van der Kolk3
and B.W. Tichelaar3
Abstract
An experimental multicomponent three-dimensional (3D) seismic
survey has been
carried out over the Natih field in Oman. This paper describes
the small-scale two-
dimensional experiment carried out beforehand, and how the
results obtained from this
pilot were used to assess the feasibility of a nine-component
three-dimensional (9C3D)
operation as well as to determine the field parameters for the
field-scale 3D survey. It
also describes the two VSPs and a wireline shear log, acquired
in conjunction with the
pilot experiment, and the importance of such borehole data for
establishing the correct
time-to-depth relationship for the seismic data and for
providing an independent check
on the seismic interpretation. The observation of cusps in the
offset VSP indicated the
strong anisotropy of the Fiqa shales overlying the Natih
reservoir.
Introduction
The main reservoir of the Natih field is formed by a fractured
limestone. The anticlinal
structure has gentle dips (at most 4), is shallow, and is
overlain by the Fiqa shales. The
fractures are nearly vertical. Extensive knowledge has been
acquired throughout 30
years of production from a large number of wells. This makes it
an ideal candidate for a
seismic experiment aiming at establishing the presence of
shear-wave anisotropy and
its relationship to reservoir fracturing. Nevertheless, before
making the final decision
on an expensive nine-component three-dimensional (9C3D) survey,
a pilot experi-ment was carried out involving some 9C2D recording
with minimal mobilization of
special equipment. To establish unambiguous identification of
the major horizons and
to obtain an independent measure of anisotropy, a zero-offset
VSP, an offset VSP and a
dipole wireline shear log were also acquired. The implications
of these experiments are
described in detail below.
The pilot 9C2D experiment
The pilot experiment consisted of the acquisition of a short 2D
seismic line, utilizing
three-component receivers in combination with both conventional
vertical (P) and
1998 European Association of Geoscientists & Engineers
617
Geophysical Prospecting , 1998, 46 , 617–646
1 Received August 1997, revision accepted July 1998.2 Nederlands
Aardolie Maatschappij, PO Box 28000, 9400 HH Assen, The
Netherlands.3 Shell Research and Technology Centre, PO Box 60, 2280
AB Rijswijk, The Netherlands.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
2/30
shear (S) vibroseis sources. The geophones used were in the
Gal’perin orientation,
which has the advantage of identical sensors in a symmetric
configuration. A
disadvantage is that in-line and cross-line panels can only be
made by combining data
from all three components. Noise or distortion originally
present on one trace is then
present in all three orthogonal components.The first step in
determining the optimal geophone arrays is the identification of
the
various wave modes recorded in the data. For this purpose a
noise spread was
recorded. In order to obtain sufficient offset we recorded the
noise spread in four parts.
Each of the recordings has a different near-offset. A
‘moving-source’ noise spread was
recorded with a maximum offset of 1500 m. By moving the source
two effects could be
observed: firstly, on soft gravel the surface waves dominated
the seismic record; and
secondly, the Rayleigh wave could be seen scattering back from
the side of a wadi. A
wadi is a dry river-bed; it is more consolidated and is often
covered with larger rock
fragments than the surrounding soil.
Surface waves were compared in detail for shot records acquired
with 12-element
and 24-element areal arrays. As very little difference could be
seen, it was
recommended that a 12-element geophone array should be used in
the 9C3Dsurvey. A cross-line receiver pattern was found to be
effective in attenuating this noise,
attributed to scattering. The best results were obtained with a
receiver pattern cross-
line extent of 40 m and a 25 m shot spacing. The parameters were
similar to those used
for conventional 3D seismic acquisition in this area.
On the source side, an obvious requirement is that the amplitude
and phase of the
shear signals are repeatable for the two perpendicular source
directions used. By
controlling the ground force a known seismic wavelet is obtained
that is independent of
the acquisition direction. For this purpose, force control was
installed on the (Prakla
VVCA/SH17) shear vibrator. Various baseplate designs were
considered. On the
survey gravel plain, a baseplate design with teeth was preferred
over a flat baseplate to
improve the ground coupling.
An important parameter is the vibrator’s output force required
to obtain sufficientreflection signal back from the target
reflections. In the absence of any shear data for
comparison, there was some apprehension regarding the
penetration of shear energy
into the ground. A sweep was therefore designed which gave the
maximum possible
output force at the proposed location. This resulted in a 24 s,
6– 48 Hz linear sweep at a
70 kN output force. Thus a ‘production spread’ was recorded
which simulated the
output force of four vibrators (the maximum envisaged in the
9C3D survey) by
sweeping in total 16 times per vibration point. A source pattern
was simulated by
dividing the 16 sweeps equally over four locations 12.5 m apart.
In order to obtain
sufficient offsets with the limited number of recording channels
available for this
experiment, we recorded a production spread in four parts. The
spread was kept at its
original location but the source was moved three times to give a
maximum offset of
1521 m. A simulation of two vibrators was clearly inferior to
the results of a simulationof four vibrators. It was therefore
recommended that a group of four shear vibrators
should be used in the 9C3D experiment.
618 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
3/30
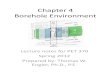
With this equipment in place and the field parameters decided,
the seismic pilot line
was orientated east– west (Fig. 1), at 45 to the main open
fracture direction in the
reservoir. At the test site the top of the Natih reservoir lies
at a depth of 700 m and
dips about 4 to the west.
A shear experiment over the Natih field
619
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 1. Surface location of well Natih-85, vibration
points of VSPs and pilot line.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
4/30
Results
Figure 2 shows displays of some of the horizontal-component data
acquired. Note that
by this terminology we refer consistently to the four components
of data recorded by
the horizontal components of the geophones and generated by two
perpendicular
directions of the shear vibrator. The displays contain the four
horizontal components
of a shot gather with an offset range between ¹1200 m and þ1200
m. The following
processing was applied:
1 statics (the same for all components),
2 k – f filtering for
ground-roll removal, and
3 NMO correction with the so-called EE stacking
velocities.
A precise nomenclature is adopted to identify unambiguously the
various components.
Each data component is identified by a two-letter label to
specify the source and
receiver orientation, respectively. We use N for North, E for
East and Z for vertical. For
example, data component EE was generated with an east–west
polarized source and
recorded by an east–west orientated geophone. For our pilot
line, component EE thus
has shots and receivers orientated parallel to the seismic line
whereas component NN
has shots and receiver orientated perpendicular to the seismic
line.
The residual moveout on the NN component for all reflections can
be seen in Fig. 2.
Data components NE and EN are those with orthogonal
source–receiver orientation.
These contain very little coherent reflection signal in the
shallow part, but at 2.40 s, and
particularly around 2.65 s, significant reflection energy can be
seen. This is a clear
indication of anisotropy in this time window.
A criterion for determining the shear-wave polarization is the
maximum linearity of
the particle motion. This is based on the principle that a
linearly polarized signal
preserves its linear particle motion if the displacement vector
coincides with that of one
of the shear polarization eigenmodes. We calculated the
linearity of the particle motion
in the shot gather within the time windowbetween 2.60s and 2.70s
for a full 180 range
of orientations. The result is shown in Fig. 3, and the results
are clearest for the negativeoffsets. At small offsets, maximum
linearity (red colour) occurs in the directions NW
and NE. At the large offsets, maximum linearity is seen with the
data orientated north–
east. This means that for far-offsets the largest shear-wave
splitting is seen with the data
orientated north–east. Another illustration of this phenomenon
is shown in Fig. 4, in
which components NN and EE are displayed next to each other.
Notice the absence of
splitting at the small offsets in the 2.40–2.65 s time interval.
The observed variation of
the shear eigenpolarization with offset, and with
shot-to-receiver bearing, has
consequences for the processing of 9C3D data. Velocity analyses
and stacking, for
example, will be inferior if shot and receiver orientations are
fixed (i.e. not varying with
offset and bearing). A possible solution is to limit the data to
small offsets.
Figure 5 shows the result of rotating the data into the NE–NW
direction. Down to
2.40 s there is still no shear-wave splitting at the small
offsets, but at 2.65 s a clear timesplitting has occurred. Also
notice the inverted polarity at 2.50 s. At the far-offsets the
data appear more noisy than in Fig. 4, a consequence of the
interference of the two
620 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
5/30
A shear experiment over the Natih field
621
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 2. Four-component prestack data set in [N,E]
coordinates (NN, NE, EN, EE), NMO
corrected with the EE stacking velocities.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
6/30
622 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
F i g u r e
3 .
L i n e a r i t y o
f p a r t
i c l e m o t i o
n a s a
f u n c t i o n o
f s o u r c e – r e c e
i v e r o
f f s
e t a n
d r o t a t i o n a n g
l e ( i n t e r v a
l 2 . 6 –
2 . 7
s ) .
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
7/30
A shear experiment over the Natih field
623
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 4. Shot gathers for components NN and EE (NMO
corrected with EE stacking
velocities). No splitting at small offsets, but residual moveout
at larger offsets for component
NN.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
8/30
624 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 5. Shot gathers Y0Y0 and X 0X 0 with Y0¼
NE and X 0¼ NW (NMO corrected with EE
stacking velocities). Note the splitting for the small offsets
at 2.6 s.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
9/30
shear modes in this particular coordinate system. The observed
variation of the shear
polarization eigendirections with offset and shot-to-receiver
bearing has consequences
for the processing of 9C3D data. Steps such as velocity analysis
and stacking, with
source and receiver orientations independent of offset and
bearing, will give inferior
results because of the mixing of the shear modes. A solution is
to limit the processing tosmall offsets only.
As we have not yet established a time–depth relationship for the
major horizons, it is
not possible at this point to identify the Natih interval
unambiguously. However, this
will be revealed by the VSP data acquired after the pilot
experiment; this is the subject
of the next section.
Acquisition of the shear VSPs
Two VSPs were recorded with Schlumberger’s Combinable Seismic
Imager (CSI, also
known as CSAT) in well Natih-85 at offsets of 90 m and 614 m.
For brevity we refer to
the former as the ‘zero-offset VSP’. The well position with
respect to the pilot surface
seismic data and the coverage of the 9C3D survey is shown in
Fig. 1(b). Shear datawere generated with one shear vibrator moving
forwards and backwards over a quarter
circle with a radius of 5 m. With this technique the two
zero-offset shear vibration
points are almost 5 apart, as seen from the well head, but
no correction has been made
for this effect. Compressional data were acquired with a
separate vertical vibrator. Data
were acquired in two open-hole sequences. First the well was
drilled down to the top of
the Natih formation after which the zero-offset VSP was acquired
and recorded from
top Natih up to a depth of 280 m, with a nominal depth decrement
of 15 m. The offset
VSP was acquired up to a depth of 600 m. After deepening the
well down to about
1125 m the deepest parts of both VSPs were acquired in the same
manner. At most
levels the shots were repeated several times.
Zero-offset shear VSP data quality and interpretation
The best shots were selected for further processing.
Subsequently the data were rotated
in a fixed N–E –Z coordinate system which is necessary in view
of the different
coordinate systems of the vibrators and the orientation of the
tool in the hole. In view of
later rotation operations applied to the data, we use primed
characters to indicate
transformed data; for such a new coordinate system we will use
X 0 and Y0, and this is
related to the N–E–Z system as follows: X ¼ north and Y¼
west. The zero-offset pure
shear data are shown in Fig. 6, with an automatic volume control
(AVC) of 200 ms
applied for display purposes. The data quality is obviously good
and direct waves as
well as reflected upcoming waves are clearly visible. The fact
that coherent energy is
present on the two cross-components is evidence of anisotropy.
Note that on all
components tube waves are visible, with a velocity of 1050
m/s.From Fig. 6 it is possible to establish the expected P- and
S-wave arrival times from
top Natih on the surface seismic. At the well location, top
Natih is at a depth of about
A shear experiment over the Natih field
625
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
10/30
626 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
F i g u r e
6 .
Z e r o - o
f f s e t s
h e a r
V S P d a t a a
f t e r c o r r e c t i o n
f o r t o o
l o r i e n t a t i o n
( A V C a p p
l i e
d ) .
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
11/30
900 m, therefore the P-wave two-way reflection time will be
about 835 ms and the
S-wave two-way reflection time will be about 2550 ms. For the NN
component the
arrival times of the direct P- and S-waves were measured and
plotted (Fig. 7).
From these we derive V p/V s¼ 2.2 for the
shallow part of the data and V p/V s¼
2.8
for both the Fiqa shales and the Natih formation. The low
V p/V s for the shallowpart may be affected by the
lack of data over this interval.
Comparison between seismic and VSP velocities
In Tables 1 and 2 the vertical interval velocities derived from
the zero-offset VSP are
compared with the seismic interval velocities obtained from the
pilot data using
stacking velocities with the Dix equation. The stacking
velocities are measured from the
moveout on the far-offsets, for which the eigendirections are NN
and EE.
The seismic velocities of the shear waves are significantly
higher than the vertical
velocities from the VSP. Based on the vertical velocities the
event at 2.40 s on the pilot
shear data could be identified as the top Natih reflection. This
unambiguous event
identification is one of the most important objectives of the
VSP data. Significantly, itproves that the observed shear-wave
anisotropy at small offsets in the pilot experiment
commences at the Natih level, which is consistent with an
interpretation of vertical
A shear experiment over the Natih field
627
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 7. Picked direct arrival times for P- and
S-waves.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
12/30
628 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
T a b l e
1 .
C
o m p a r i s o n o
f s h e a r v e
l o c
i t i e s
f r o m
V S
P a n
d p
i l o t d a t a .
T w o - w a y s h e a r
V e r t
i c a
l s h e a r
S e
i s m
i c v e
l o c
i t y
S e
i s m
i c v e
l o c
i t y
V e
l o c
i t y r a t i o
V
e l o c
i t y r a t i o
t r a v e
l t i m
e i n t e r v a
l
v e
l o c
i t y
E E
N N
E E / v e r t
i c a
l
N N / v e r t
i c a
l
0 – 1
5 0 0 m s
5 7 5 m
/ s
1 4 2 0
1 1 5 m
/ s
1 1 6 5
1 1 5 m
/ s
2 . 4
7
0 . 2
2 . 0
3
0 . 2
1 5 0 0 – 2 0
0 0 m s
6 9 0 m
/ s
1 7 6 0
2 1 0 m
/ s
1 3 1 5
2 7 5 m
/ s
2 . 5
5
0 . 3
1 . 9
1
0 . 4
2 0 0 0 – 2 4
0 0 m s
8 4 0 m
/ s
2 0 6 5
3 3 5 m
/ s
1 5 8 5
3 3 5 m
/ s
2 . 4
6
0 . 4
1 . 8
9
0 . 4
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
13/30
fractures in the reservoir. This first indication of consistency
between the observations
on the shear data and the expected behaviour in the presence of
reservoir fractures was
crucial for the entire 9C3D project.
Zero-offset VSP anisotropy
In order to arrive at the direction of anisotropy and the
associated shear-wave time
splitting, a continuous coordinate transformation was carried
out on all four (pureshear) components to find the angle at which
the time splitting between the rotated NN
and EE components shows a maximum. This maximum is taken as the
time splitting,
the corresponding angle as one of the symmetry axes of the
anisotropy.
An example for the zero-offset VSP is shown in Fig. 8 for a
depth of 780 m where the
downgoing waves show a maximum time splitting of 2.89 ms at an
angle of
approximately N30E. This procedure was carried out for both
downfields and
upfields of the zero-offset VSP, and the results are shown in
Fig. 9.
The splitting at the shallowest level (300 m) is ¹4 ms, which
indicates that in the top
layers some anisotropy must already be present. The direction of
anisotropy relates to
the fast component and hence results in a positive splitting. In
the case of a negative
splitting the associated direction relates to the slow
component. For the shallow part
(down to 550 m) the direction for the downgoing wave is found to
be between N30Eand N40E. Thereafter, down to top Natih, the
direction changes from approximately
north at a depth of 550 m to approximately N30E at about 830 m.
From 300 m to top
Natih the anisotropy is about 1%. The splitting of the upcoming
wave from top Natih
exhibits an increase in the splitting to some 10 ms at 500 m;
the increase seems to be the
continuation of the downgoing wave. However, the direction of
the maximum splitting
stays constant at about N10E. At present the reason why the
downfield gives a
different direction from the upfield is not known. Unfortunately
the quality of the data
obtained between depths 800 m and 900 m is such that no
meaningful splitting can be
extracted.
Zero-offset VSP time splitting and anisotropy direction with
strippingBefore analysing the Natih interval we have to eliminate
the anisotropy effects of
the Fiqa formation. This process is called stripping
(Winterstein and Meadows 1990).
A shear experiment over the Natih field
629
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Table 2. Comparison of compressional velocities from VSP
and pilot data.
Two-way P-wave Vertical P-wave Seismic P-wave Velocity ratio
traveltime interval velocity velocity seismic/vertical
0–800 ms 1975 m/s 2075 75 m/s 1.05 0.04
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
14/30
The data at a depth of 780 m were selected to carry out the
stripping as they offer the
best-quality data above the reservoir with very similar
cross-components (X 0Y0
and
Y0X 0). The data were first (parallel) rotated over
34 (corresponding to the direction of the fastest shear
wave at this level; see Fig. 8) and subsequently 2.9 ms was
subtracted
from the time of the slowest components Y0X 0
and Y0Y0. A pictorial proof the validity of
shifting the data of the slowest components with the established
time shift is shown in
Fig. 10(a), where the arrivals of two perpendicular shots into
two perpendicular
receivers are constructed. The waves have travelled through two
layers with different
directions and magnitudes of anisotropy. As can be seen, a shot
in the X-direction
arrives at both receivers at the same time. Receivers from the
Y-shot show the same
arrival times but these are retarded. This method of stripping
is valid only for one-way
wave propagation as in the downfield of VSPs. For reflection
seismics, however, the
slowest component should be corrected with the time splitting
obtained and the cross-
component with half the time splitting. This is illustrated in
Fig. 10(b) where, for
the same model, the reflected waves at the surface are analysed.
For upfields inVSPs the situation is more complicated: the
downgoing waves down to the
stripping level should be corrected according to Fig. 10(a) and
the remaining part
630 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 8. Example of time picks for shear components
X 0X 0 and Y0Y0 as a function of rotation
angle.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
15/30
of the wave path with an (as yet unknown) combination of the
one-way and the
two-way corrections.
The time splitting and the direction of the fastest shear wave
over the Natih intervalafter stripping at a level of 780 m are
shown in Fig. 11. The splitting is now very small:
almost zero with a possible increase to about 3 ms towards the
bottom of the well,
A shear experiment over the Natih field
631
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 9. Time splitting and main direction of anisotropy
as a function of depth as measured
from direct arrivals of downgoing waves and from the reflection
of top Natih in the upfield.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
16/30
632 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 10. (a) Direct arrival times of two shots (X and
Y) after travelling through two
layers with different anisotropy; direction of top layer in
X-direction. Signals arrive at the same
time for individual shots. (b) Reflected arrival times of two
shots (X and Y) after travelling
through two layers with different anisotropy; direction of top
layer in X-direction. Signals on
cross-components arrive at the same time.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
17/30
indicating that hardly any anisotropy is present over the Natih
interval at the location of
well Natih-85. Because the splitting is so small the direction
of the fastest shear wave is
ill defined, as is apparent from the scatter in the azimuth
plot. For this reason we havenot attempted to correct the upfield
of the deeper reflection via stripping. The bottom
of the Natih interval (Natih E) yielded a splitting of some 6 ms
with an azimuth for the
A shear experiment over the Natih field
633
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 11. Time splitting and main direction of anisotropy
as a function of depth as measured
from direct arrivals in zero-offset VSP after stripping at 780
m.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
18/30
fast wave between N45E and N50E. This is consistent with the
pilot experiment
results. A deeper event, although not penetrated by well
Natih-85, was identified as
corresponding to the top Shuaiba reflection and yielded an
upfield splitting of some
6 ms with an azimuth of about N50E.
Observation of cusps in the offset VSP
The VSP acquisition programme in well Natih-85 also included an
offset shear VSP.
With the seismic sources located 614 m offset to the east of the
well head, recordings in
the well were made between depths of 600 and 1100 m. We now show
and explain an
interesting wave phenomenon observed on this VSP and prove its
recognition to be of
paramount importance for the determination of the elastic
properties of the
overburden.
Figure 12 shows three data components from this offset VSP. The
downgoing
P-wave can be seen on components EE and EZ around 0.5 s. For
clarity we point out
that component EE for the offset VSP data implies shots and
receivers orientated
parallel to the source-location–well-head direction, as the shot
location is to the east of the well head (Fig. 1). The
downgoing shear wave should arrive near 1.4 s at 600 m
depth in the offset VSP if it propagates with the vertical
velocity. However, the data
show arrivals near 1.1 s, indicating the strong anisotropy of
the Fiqa shale. Instead of a
single arrival, four arrivals are observed with distinct
traveltimes and distinct
polarizations. Branches 1 and 2 have a particle motion
predominantly horizontal in
the east–west direction, branch 3 has a true vertical particle
motion and branch 4 is
polarized north–south. The corresponding hodograms, depicting
the particle motions
in a short time gate around the points indicated on the
branches, are given in Fig. 13.
The apparent velocities of these arrivals are clearly distinct
from the tube-wave velocity
and the P-wave velocity. The apparent velocity of the branch
seen on the EZ
component is very large.
These four arrivals can be explained as an exceptional
manifestation of anisotropywhich is known to occur in a medium with
elastic parameters such that the wave
surface of one of the shear modes contains cusps. The three
branches observed on
components EE and EZ belong to this shear mode, with the upper
arrival on
component EE being the reverted branch of the wavefront. This
interpretation of the
data is supported not only by traveltime modelling (see
discussion below), but also by
analyses of the wavelets. The wavelet on the reverted branch
should, in a homogeneous
medium, be the Hilbert transform of the wavelet on the normal
branches (White 1982).
There is indeed a remarkable agreement between the Hilbert
transform of the wavelet
of what is interpreted as a normal branch and the wavelet of the
interpreted reverted
branch (Fig. 14).
Modelling of the cusps
We undertook an anisotropic ray-trace modelling exercise to
match the observed
634 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
19/30
A shear experiment over the Natih field
635
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
F i g u r e
1 2 .
B a
s i c
d a t a f r o m
o f f s e t V S P ( c o m p o n e n t s
E E
, E Z a n
d N N ) .
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
20/30
traveltimes and polarizations, and in this way retrieve the
elastic medium parameters of
the Fiqa shales covering the Natih reservoir. First the time
picks were corrected forchanges in wavelet shape as described
above. The matching was done at two depth
levels, namely 645 m and 780 m. In the modelling the interval
from the surface down to
645 m was assumed to be homogeneous. This implies that the
inhomogeneity observed
in the zero-offset VSP is explained in terms of anisotropy.
While this is obviously not
correct, the neglect of inhomogeneity simplifies the inversion;
furthermore we feel that
the inhomogeneity is too small to warrant a more robust
approach.
An obvious choice for the anisotropy system is that of hexagonal
symmetry with a
nearly vertical symmetry axis. This is not only because of the
limited complexity of
such a system but also because this matches the measured
polarizations of the fast and
slow shear modes. The fast mode is polarized in the vertical
plane through source and
receivers and exhibits the cusps, whilst also having the larger
stacking velocity.
When we use the conventional notation, parameter
c 33/ r is the squared verticalP-wave velocity and
is computed in a straightforward manner from the zero-offset
shear VSP. Similarly c 44/ r is easily
determined as this is the squared vertical shear
636 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 13. Hodograms at different positions along the
cusp. X ¼ east ¼ in-line. Y¼ north
¼
cross-line, Z¼ vertical.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
21/30
velocity. Branch 4 in the offset shear VSP corresponds to the
shear wave with anelliptical wave surface, defined by
c 44/ r and c 66/ r. With
c 44/ r known, c 66/ r is
then
determined from the time pick on this branch. The remaining
elastic parameters
are c 11/ r and c 13/ r.
They can be found in a trial-and-error procedure by scanning
the
c 11/ r – c 13/ r space for
combinations that result in a match with the four observed
traveltimes, i.e. the offset P-wave traveltime plus the three
time picks for the cuspoidal
shear mode. One additional variable is the orientation of the
symmetry axis. With an
exactly vertical symmetry axis, no combination of elastic
constants could be found that
fitted the observed times. Even the best fit in this orientation
still gave time errors of up
to 20 ms which is far outside the measurement accuracy. A much
better fit (virtually no
difference between measured and modelled traveltimes) was
obtained with the
symmetry axis tilted 3 to the east. In this orientation
the symmetry axis is
perpendicular to the local structural dip of the Fiqa shales.
The azimuth of the tiltedsymmetry axis was not well resolved:
variations between N45E and E45S affected the
traveltimes by less than 5 ms.
A shear experiment over the Natih field
637
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 14. Wavelets of direct arrivals for different
branches. The wavelet of branch 1 is almost
identical to the Hilbert transform of the wavelet of branch
3.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
22/30
The results thus derived for this first layer (i.e. from the
surface to depth 645 m)
are:
c 11/ r¼ 5.15 km2
/s2
,
c 13/ r¼ 3.00 km2/s2,
c 33/ r¼ 3.69 km2/s2,
c 44/ r¼ 0.39 km2
/s2
, and
c 66/ r¼ 1.17 km2
/s2
.
With these parameters for the first layer and a plane interface
at depth 645 m, dipping
4 to the west, the modelling was continued for the 780 m
depth level. Again,
traveltimes could be matched only when this second interval also
possessed strong
anisotropy of hexagonal symmetry with a nearly vertical symmetry
axis. For the best fit
the modelled times were within 5 ms of the picked times, except
for the branch shown
on component EZ on the offset VSP, which was 7 ms in error. The
parameters obtained
are:
c 11/ r¼ 7.0 km2
/s2
,
c 13/ r¼ 4.0 km2
/s2
,c 33/ r¼ 5.3 km
2/s2
,
c 44/ r¼ 0.72 km2
/s2
, and
c 66/ r¼ 1.9 km2
/s2
.
Again the symmetry axis is approximately perpendicular to the
structural dip. A wider
range of symmetry axis orientations was possible without
affecting traveltimes by more
than 5 ms: from true vertical up to 10 tilt for azimuths ranging
from north through east
to south.
The velocities in the second interval are higher than those in
the first layer, but the
anisotropy characteristics are quite similar. For both intervals
the elastic parameters
result in cusps in a direction at about 45 with the symmetry
axis. This occurs when the
condition (c 11¹ c 44)(c 33 c 44)¹
(c 13þ c 44)2>0 is fulfilled (Musgrave 1970). Because
of
the similarity between the elastic tensors in the two layers the
cusps generated in theshallow part of the Fiqa shale are sustained
in the deeper part. Modelling shows that for
an isotropic second layer, for instance, ray-bending effects
would have resulted in a
rapid shrinking of the surface of the triangle formed by the
three branches (also known
as a ‘laguna’).
We are not aware of other reports of this phenomenon, which was
recognized in
theory a long time ago. It is difficult to believe that the Fiqa
shales are unique worldwide
in terms of anisotropy cusps. The absence of similar
observations elsewhere might be
explained by the fact that it requires the combination of a
suitable shear VSP
experiment and the circumstance of a large interval with uniform
characteristics,
allowing the laguna to develop. In general, inhomogeneities
causing ray bending or
reflection effects will rapidly deform the characteristic shape
of a cuspoidal wavefront,
making it difficult to recognize. However, we can conclude that
the presence of suchstrong Fiqa anisotropy over a large depth range
has important implications for the
interpretation of the underlying Natih reservoir.
638 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
23/30
Well log data
Several types of sonic log were run with the Schlumberger’s
Dipole Sonic Imager
(DSI) tool in Natih-85. Figure 15 shows the raw data for the
compressional-wave and
one of the shear-wave logs. The compressional data show a
regular increase in velocityover the Fiqa shales in contrast to the
shear velocities, which exhibit definite breaks in
the lithology. Two shear logs were recorded over most of the
well trajectory with
perpendicular sources and receivers parallel to the sources. In
multicomponent
nomenclature they can be compared with X 0X 0
and Y0Y0
components. From these
shear logs we have constructed a fast and a slow shear log by
taking at every depth the
highest and lowest reading, respectively. The difference between
these two integrated
shear logs shows some remarkable features (Fig. 16a).
In a qualitative sense the splitting derived from direct
arrivals (Fig. 16b, which is a
copy of Fig. 9) is almost identical to the splitting of the two
integrated shear logs. In a
quantitative sense the splitting between the two shear logs is
about 3.5 times as large as
the splitting from the direct waves of the VSP data. This could
be a result of the fact
that the layers (with different intrinsic anisotropic
directions) are significantly smallerthan the wavelength of the
seismic. The seismic data represent an average property as
opposed to the intrinsic anisotropy of each individual layer as
measured by the sonic
A shear experiment over the Natih field
639
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 15. P- and S-wave traveltimes as a function of
depth as measured in Natih-85.
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
24/30
tool. Consequently the seismic anisotropy can be at most the
same as the borehole-
derived anisotropy. (However, higher-frequency borehole waves
have the possibility of
avoiding any compliant or fractured zones by ‘fast-tracking’
whilst seismic waves donot. In that situation higher-frequency
waves might underestimate any fracture-related
anisotropy.) The changes in the slope of both curves correspond
to changes in
640 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 16. Comparison between time difference of the two
integrated shear logs (a) with the
splitting of the direct arrivals (b).
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
25/30
lithology. Although the lithology is reported to be shale from
100 m down to 900 m,
obvious changes are visible from the shear logs.
DSI data processing
It is, in principle, possible to detect aligned open fractures
with borehole acoustic
methods since such fractures can cause the reservoir to be
anisotropic for the
propagation of borehole flexural waves (Ellefsen, Chang and
Toksöz 1991). Flexural
waves are dispersive surface waves (modes) excited by an
acoustic dipole source in a
mud-filled borehole that propagate along the borehole wall. In
anisotropic formations,
the flexural wave splits into a fast mode and a slow mode. We
refer to the particle
motion of the fast and slow flexural modes measured on the
borehole axis in the plane
perpendicular to the borehole as mode orientations or anisotropy
orientations, which
are aligned with the polarizations of fast and slow quasi-shear
waves, respectively, when
such body waves would travel through the formation parallel to
the borehole. For
example, the orientation of the fast flexural mode in a vertical
borehole penetrating a
formation which contains steeply dipping, aligned, open
fractures is expected to beparallel to the strike of the
fractures.
The flexural waves excited by the DSI tool originate from two
acoustic dipole
sources orientated perpendicularly to each other and to the
borehole wall. Flexural
waves from each source are recorded along two perpendicularly
orientated receiver
arrays, resulting in four-component (4C) recordings. The
processing method we used
is similar to the method presented by Esmersoy et al .
(1994). For each source depth the
two perpendicular mode orientations are estimated from the
recorded waveforms, the
two corresponding (quasi-)flexural modes are synthesized and
their slowness at some
frequency is estimated. Thus a fast-mode orientation and a
slow-mode orientation are
determined. All elements of the tool’s dipole receiver array are
simultaneously used in
the processing.
Figure 17(a) shows flexural-mode orientations (red diamonds) for
Natih C, togetherwith the gamma-ray log (black curve). Only one of
the two perpendicular mode
orientations is shown; its azimuth ranges between about N30E and
N60E. Figure
17(b) shows the same orientations together with the borehole
geometry (see caption).
An important observation is that the borehole is elongated in
the NW–SE direction and
that the mode orientations resemble the borehole geometry.
Figure 17(c) shows the
slowness of the two flexural modes (red and green diamonds)
together with the
standard error (red and green dashes), estimated at a frequency
of 2.0 kHz. While a
lower frequency would yield slowness estimates closer to the
formation (quasi-)shear-
wave velocities, as predicted by flexural-wave dispersion
theory, flexural-wave
amplitudes recorded in Natih C are below the noise level for
frequencies less than
2.0 kHz. The red diamonds in Fig. 17(c) belong to the
orientations in Fig. 17(a). In
conclusion, while mode orientations (anisotropy orientations)
are well resolved fromthe 4C flexural data, significant differences
in slowness of the two flexural modes are
not well resolved in Natih C.
A shear experiment over the Natih field
641
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
26/30
642 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
27/30
Figure 17(d) shows mode orientations for Natih B together with
the gamma-ray log.
Along most of the depth interval the borehole geometry (Fig.
17e) shows no significant
elongation. Owing to different formation characteristics and
hole size, the flexural
waves recorded along Natih B contain higher frequencies than
those recorded along
Natih C. Figure 17(f) shows the slowness of the two flexural
modes determined at3.0 kHz. Between shots 550 and 630, the
difference in slowness for the two flexural
modes is statistically significant, while outside this interval
no significant slowness
difference is measured. The fast-mode orientation varies between
about N30E and
N60E between shots 550 and 630.
Figure 17(g) shows mode orientations for Natih A together with
the gamma-ray log.
The orientation varies between about N10W and N30E. The borehole
is
predominantly elongated in a N– S direction (Fig. 17h). Compared
with the Natih C
unit, the caliper and anisotropy azimuths in the Natih A
interval do not resemble each
other as well; deviations are as large as 30. Figure 17(i) shows
that a large slowness
difference is measured for the two flexural modes.
Discussion of the DSI results
The NE–SW flexural-mode orientations observed along Natih C and
part of Natih B
are consistent with fast-mode orientations found in the
downfield of the zero-offset
VSP survey as well as the pilot experiment and the geological
expectations. It is
therefore attractive to explain these orientations in terms of
the presence of open
fractures aligned in the NE–SW direction, but for completeness
we need to offer an
alternative explanation for some intervals at least. Because the
fractures are orientated
parallel to the present-day in situ maximum horizontal principal
stress, they are likely to
be open (Mercadier and Mäkel 1991). According to this
interpretation the phase
velocity of the NE–SW orientated flexural mode should be larger
than the phase
velocity of the perpendicularly polarized mode, measured at some
frequency. Because
we do not resolve such a slowness difference (Fig. 17c), the
magnitude of flexural-waveanisotropy is apparently small, which is
in line with the small time splitting found in the
zero-offset VSP.
The alternative interpretation of the observed mode orientations
in Natih C is that
A shear experiment over the Natih field
643
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
Figure 17. Estimated anisotropy orientations and borehole
geometry for Natih C (top), B
(middle) and A (bottom). (a),(d),(g) Anisotropy orientations
(red diamonds) with respect to
geographic north, together with the gamma-ray log (black curve);
a reference line (dashed) is
shown at 0. (b),(e),(h) Borehole geometry; the red and green
curves are the hole diameter in two
perpendicular directions, the blue line is the caliper
orientation of the red curve; anisotropy
directions are also shown (red diamonds). (c),(f),(i) Slowness
of the two synthesized flexural
modes. Red diamonds belong to the mode orientations shown in
(a),(d),(g) and green diamonds
to the perpendicularly orientated flexural mode. The time window
is 1.5–4.0 ms (Natih A), 1.0–
3.0 ms (Natih B), 1.5–4.5 ms (Natih C shot 1000–1052) and
1.5–3.5 ms (Natih C shot 1053–
1110).
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
28/30
they are caused by the elongated borehole shape rather than
formation anisotropy. A
flexural wave propagating in an elliptical borehole in a purely
isotropic formation splits
into a slow mode and a fast mode with mode orientations parallel
to the major and
minor axes (Randall 1991). The observed mode orientations may
also result from
superposition of the effects of borehole shape and formation
anisotropy. Note that theshort caliper (red dashed curve in Fig.
17b) is parallel to the proposed fast-mode
orientation for Natih C.
The borehole cross-section along the Natih B unit appears to be
predominantly
circular (Fig. 17e). Furthermore, slowness estimates at 3 kHz
are not significantly
different for the two modes along most of Natih B; the two
flexural modes propagate at
equal slowness along most of the unit. The large variability in
mode orientations is
therefore most likely to be a consequence of the absence of
anisotropy and is noise
controlled. An exception is the depth interval between shots 550
and 630 (965 m and
978 m depth), where low gamma readings indicate that the rocks
probably consist of
relatively clean carbonates; the NE–SW fast-mode orientation in
this depth interval is
similar to Natih C.
The borehole along Natih A is elongated. Caliper azimuth and
flexural-modeorientation differ by as much as 30 (Fig. 17h).
This suggests that mode orientations
are not fully dominated by borehole shape in Natih A. Note that,
in contrast with the
findings for Natih C, the long caliper (red dashed curve in Fig.
17h) is parallel to the
fast-mode orientation for Natih A. The processing indicates that
the fast-mode
orientation for Natih A is not NE–SW, but is centred about a N–S
direction with a
scatter of approximately15. This orientation is very close to
the N10E direction
found from the upfield of the zero-offset VSP.
The difference in slowness between the two shear waves at 2.0
kHz over the Natih A
interval is about 40 ms/ft (130 ms/m). Integrating this value
over the thickness of this
interval (some 40 m), we arrive at a splitting of about 5 ms
one-way time which is com-
parable with the maximum time splitting of 3 ms derived from the
zero-offset VSP.
Conclusions
The 9C2D seismic pilot, shear VSP and DSI log experiments
discussed provided
significant underpinning of the large-scale Natih 9C3D survey in
terms of expected
data quality, field effort, usable offsets for post-stack
processing and interpretation,
feasibility of measuring anisotropy and local calibration of the
later full-scale anisotropy
interpretation. With the exception perhaps of the offset shear
VSP (which may only be
needed in special circumstances), we consequently recommend such
feasibility and
calibration experiments for any full-blown 9C3D survey of this
kind.
The pilot experiment confirmed the feasibility of acquiring
shear reflection data of
sufficient quality with conventional receiver patterns and a
conventional station
spacing. It revealed a substantial difference in stacking
velocities for the two shear-wavemodes, an indication of strong
anisotropy in the Fiqa shales that overlie the objective
Natih reservoir.
644 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
29/30
The zero-offset VSP was essential in providing the vertical
velocities required for
time–depth conversion. With this information the Natih interval
could be identified in
the pilot data between 2.40 and 2.65 s. Analyses of this
interval gave clear indications of
shear-wave splitting with the fast shear wave polarized N45E,
which is consistent with
open fracture directions known from nearby wells. The arrival of
the top Natih shearreflection later than originally expected was
particularly important in relaxing the initial
16 m station spacing to the standard 25 m spacing. By showing
that the ground roll
would cross the Natih reflections at a later time than had been
earlier estimated, we
were confident that sufficient multiplicity for signal-to-noise
suppression would be
retained within the blanking cone at standard spacing.
The offset VSP further confirmed the strong anisotropy of the
Fiqa shales and
allowed the data to be inverted in terms of its elastic
parameters. The anisotropy is such
that the wave surface of one of the shear modes has cusps. As a
result of this the
downgoing shear wavefield in the offset VSP resulted in four
clearly distinct arrivals.
The anisotropy could be modelled by hexagonal symmetry with a
nearly vertical
symmetry axis. The Fiqa anisotropy complicates 9C3D data
processing and its impact
has to be carefully considered. At small offsets the shear-wave
eigendirections will bedetermined by azimuthal anisotropy, but at
the larger offsets the strong Fiqa anisotropy
will dominate all azimuthal effects.
From the analysis of zero-offset VSP data, it is concluded that
at the location of well
Natih-85 the anisotropy in the Fiqa gives rise to a time
splitting of the order of 12 ms
two-way traveltime with an azimuth direction increasing from
N10W to about N45E
at top Natih. The anisotropy in the reservoir is small at this
well. The upfield at top
Natih is approximately N10E, whereas the splitting over the
reservoir section is at
most 3 ms. This makes it difficult to apply layer stripping for
the deeper reflections.
The deeper reflections (from Natih E and Shuaiba) show a
splitting in the upfield of
some 6 ms with azimuths of N45E and N50E, respectively.
Anisotropy orientations for various units of the Natih reservoir
have been obtained
by processing 4C borehole flexural waves recorded in well
Natih-85. For the Natih Cunit the processing results are consistent
with a NE–SW fast-mode orientation
obtained from the VSP survey, as is the case for the depth
interval between about
965 m and 978 m in the Natih B unit. For most of the Natih A
unit, fast-mode
orientations are centred about a N–S direction, in line with the
findings of the upfield
of the zero-offset VSP. Also, the small differences between the
two shear waves indicate
that at the position of well Natih-85 the anisotropy is rather
small.
Acknowledgements
The authors gratefully acknowledge discussions with J.C. Hornman
(then at Shell
Research in the Netherlands) and with D.C. DeMartini, P.
Hatchell and S. Smith atShell Development Company in Houston. We
thank the Oman Ministry of Petroleum
and Minerals for their permission to publish this paper.
A shear experiment over the Natih field
645
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646
-
8/19/2019 A Shear Experiment Over the Natih Field in Oman-pilot
Seismic and Borehole Data
30/30
References
Ellefsen K.J., Cheng C.H. and Toksöz M.N. 1991. Effects of
anisotropy upon the normal modes
in a borehole. Journal of the Acoustical Society of
America 89, 2597–2616.
Esmersoy C., Koster K., Williams M., Boyd A. and Kane M. 1994.
Dipole shear anisotropy
logging. 64th SEG meeting, Los Angeles, USA, Expanded Abstracts,
1139–1142.
Mercadier C.G. and Mäkel G.H. 1991. Fracture patterns of Natih
formation outcrops and their
implications for the reservoir modelling of the Natih field,
North Oman. SPE paper 21377.
Musgrave M.J.P. 1970. Crystal Acoustics. Holden-Day,
Inc.
Randall C. 1991. Multiple acoustic waveforms in nonaxisymmetric
boreholes and formations.
Journal of the Acoustical Society of America 90,
1620–1631.
White J.E. 1982. Computed waveforms in transversely isotropic
media. Geophysics 47, 771–783.
Winterstein D. and Meadows M. 1990. Shear-wave polarizations and
subsurface stress
directions at Lost Hills field. 60th SEG meeting, San Francisco,
USA, Expanded Abstracts,
1435–1438.
646 J.H. Hake et al.
1998 European Association of Geoscientists & Engineers,
Geophysical Prospecting , 46 , 617–646