Embed Size (px)
Citation preview

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
Asia-Pacific Journal of Operational ResearchVol. 30, No. 2 (2013) 1250052 (15 pages)c© World Scientific Publishing Co. & Operational Research Society of SingaporeDOI: 10.1142/S0217595912500522
A SEARCHER VERSUS HIDER GAME WITH INCOMPLETEINFORMATION ABOUT SEARCH RESOURCES
ANDREY GARNAEV∗
Faculty of Applied Mathematics and Control ProcessesSt. Petersburg State University, Universitetskii Prospekt 35
Peterhof, St Petersburg 198504, [email protected]
ROBBERT FOKKINK
Faculty of Electrical Engineering, Mathematics and Information TechnologyDelft University, P.O.Box 5031, 2600
GA Delft, The [email protected]
Published 10 January 2013
We introduce a search game in which a hider has partial information about a searcher’sresource. The hider can be a terrorist trying to hide and the searcher can be special forcestrying to catch him. The terrorist does not know the number of forces involved in thesearch but just its distribution. We model this situation by a noncooperative game. In arelated setup, which is motivated by wireless networks applications, the terrorist insertsa malicious node in a network, reducing network connectivity and thereby underminingits security. Meanwhile, the network operator applies appropriate measures to detectmalicious nodes and maintain network performance. We investigate how the informationabout the total search resources that are available to the hider can influence the behaviorof both players. For the case, where the distribution has two mass points, we prove thatthe game has a unique equilibrium and moreover, we describe explicitly this equilibrium,its structure and some other properties.
Keywords: Search game; Bayesian equilibrium; resource allocation.
1. Introduction
The theory of how to search for lost, missing, hidden, and even evasive objects hasbeen a subject of search theory for more than 60 years. Koopman did the initialwork on search theory during World War II for the US Navy (Koopman, 1946).The Navy’s primary search objects were enemy ships and submarines, and its owndowned fliers adrift on the ocean. Koopman developed the general fundamentalprinciples of search theory before he could get down to the specifics of naval
∗Corresponding author
1250052-1
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
problems. Later, Bayesian search theory was developed as a branch of search theorythat incorporates Bayesian statistics (Iida, 1992; Stone, 1975). If the agent who hidessomething (say, a treasure, or a gun) knows that he is being pursued or searched,and he does his best not to be detected, then the search problem can be consideredas a game theoretical between two agents: a searcher and a hider (Croucher, 1975;Danskin, 1967; Baston and Garnaev, 2000; Garnaev, 2000; Garnaev, 2007; Iidaet al., 1994; Sakaguchi, 1987; Zoroa et al., 2009). Most searcher versus hider gamesthat have been considered in the literature are zero-sum games with complete infor-mation. This paper introduces a new type of searcher versus hider game, namelya game with incomplete information about the searcher’s resource, extending thecomplete information games considered by Croucher (1975), Iida et al. (1994) andSakaguchi (1987), that were originally suggested as a model for the optimizationof antiballistic missile defence. Namely, we study the following plot in which thesearcher consists of a team of special forces that is trying to catch a hiding terrorist,who does not know the exact number of special forces but only its distribution. Thisplot is modeled by a nonzero-sum game and extends previous works on zero-sumallocation games. The other plot for the considered game is motivated by wirelessnetworks applications. Here a hider is, say, a terrorist, who wants to allocate a mali-cious node in a network in an attempt to reduce network connectivity (and therebyundermine the network’s security). The searcher is a network operator who appliesappropriate measures to detect malicious nodes to maintain network performance.We investigate how the information about the total search resources that are avail-able to the hider can influence the behavior of both players. For the case, where thedistribution has two mass points, we develop a geometrical approach allowing usto track down properties of the equilibrium, construct the equilibrium strategies inclosed form and prove its uniqueness. The two mass points distribution is impor-tant since it presents the most common case, namely, large and small resources.We analyze how the threat that large resources may be invoked influences the hiderbehavior. The large resources could represent the total searching force including thereserves while the small resources represents the special forces that are on call forsearch. Also, we discuss what happens if the distribution consists more than twomass points.
2. The Game
We first describe a standard searcher versus hider game on an integer interval [1, n].The hider selects one of the n points and hides there and the searcher tries tofind him. The game is zero-sum. For pure strategies, the payoff to the searcher isone if he finds the hider, otherwise it is zero. A mixed hider strategy is a vectorp = (p1, . . . , pn) where pi is the probability that the hider hides at point i. Thesearcher seeks the hider by dividing the given total continuous search effort x,allocating the effort xi to each point i. A mixed searcher strategy, therefore, isa vector x = (x1, . . . , xn) such that
∑ni=1 xi = x, where x is the total resource
1250052-2
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
that the searcher has and xi is the resource allocated for the search at point i.The probability that the searcher discovers the hider depends on two detectionparameters λi > 0 and αi ∈ (0, 1], and it is given by αi(1 − exp(−λixi)). Thisis an extension of Koopman’s formulation (Koopman, 1980), in which αi is takenequal to one. The parameter λi represents the difficulty of searching the location.The difficulty is inversely proportional to λi. The parameter αi is the probabilityof catching the hider, which in our game may be less than one. The payoff to thesearcher is the probability of finding the hider:
vS(x, p) =n∑
i=1
αipi(1 − exp(−λixi)).
Here we assume that the search parameters αi, λi are known to both players. If alsothe total search resource x is known to both players, then in the zero-sum scenario,in which the hider wants to minimize the probability of detection, the payoff to thehider is −vS(p, x). The game has the unique equilibrium (saddle point) (x, p) andit is given as follows (Garnaev, 2000):
xi =1λi
ln(
αi
αi − ω
), pi =
1/(λi(αi − ω))∑nj=1(1/(λj(αj − ω)))
, i ∈ [1, n],
where ω is the unique root in (0, mini αi) of the equation,
n∑i=1
1λi
ln(
αi
αi − ω
)= x.
Searcher versus hider games like the above one have been considered by Croucher(1975), Sakaguchi (1987) and Iida et al. (1994).
In this paper, we assume that the hider does not know the total resource x butthe hider does knows its distribution, namely, he knows that this resource is xk withprobability qk, where k = 1, 2 and q1 +q2 = 1. The searcher knows of course exactlywhat resource he has at his disposition. To describe this situation we introduce twotypes of searchers, namely, we will say that the searcher has type k (k = 1, 2) ifhis total resource is xk. A searcher strategy of type k is given by xk = (xk
1 , . . . , xkn)
with∑n
i=1 xki = xk and his payoff is given by:
vkS(xk, p) =
n∑i=1
αipi(1 − exp(−λixki )).
The payoff to the hider is:
vH((x1, x2), p) = −2∑
k=1
qkn∑
i=1
αipi(1 − exp(−λixki )).
We assume that each player knows the coefficients αi, λi, i ∈ [1, n], the totalresources xk and the probabilities qk, k = 1, 2. We want to find equilibrium
1250052-3
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
strategies, that is, we want to find p∗ and (x1∗, x2∗) such that for any strategy p,and (x1, x2) the following inequalities hold
vH((x1∗, x
2∗), p) ≤ vH((x1
∗, x2∗), p∗),
vtS(xt, p∗) ≤ vt
S(xt∗, p∗), t = 1, 2.
(1)
The existence of the equilibrium implicitly follows from Basar and Olsder (1995).Our goal is to find the equilibrium explicitly, to prove its uniqueness and mostimportantly, to increase our understanding of player behavior in the real-life situa-tions that are modeled by the game.
3. Auxiliary Results
We derive some conditions on the parameters that describe the optimal mixedstrategies for the players.
Theorem 1. ((x1, x2), p) is an equilibrium if and only if there are ω, ν1 and ν2
such that
αiλipi exp(−λix1i )
{= ν1 for x1
i > 0,
≤ ν1 for x1i = 0,
(2)
αiλipi exp(−λix2i )
{= ν2 for x2
i > 0,
≤ ν2 for x2i = 0
(3)
and
q1αi(1 − exp(−λix1i )) + q2αi(1 − exp(−λix
2i ))
{= ω for pi > 0,
≥ ω for pi = 0.(4)
Proof. By (1), (p, (x1, x2)) is equilibrium if and only if
p = argmaxt
vH((x1, x2), p), (5)
xt = argmaxxt
vtS(xt, p), t = 1, 2. (6)
Since vH is linear in p, (5) holds if and only there is a positive ω such that (4) holds.By (5) to find xt we have to define the Lagrangian,
Lt(xt, νt) = vtS(xt, p) + νt
(xt −
n∑i=1
xti
)
with νt the Lagrangian multiplier. Since the maximization problem is convex,the equilibrium resource allocation xt is obtained by setting the derivative of theLagrangian by xt
i equals to zero, leading to the Eqs. (2) and (3). The Kuhn andTucker Theorem (Winston and Venkataramanan, 2002) implies (4).
1250052-4
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
In the following theorem, the equilibrium is specified in closed form as functionson ω, ν1, and ν2.
Theorem 2. Let ((x1, x2), p) be an equilibrium. Then pi > 0 for any i, and(a) if x1
i > 0 and x2i = 0, then
pi =q1ν1
λi(q1αi − ω), (7)
xi =1λi
ln(
q1αi
q1αi − ω
)(8)
and
ω ≤ q1αi
(1 − ν1
ν2
), (9)
(b) if x2i > 0 and x1
i = 0, then
pi =q2ν2
λi(q2αi − ω), (10)
xi =1λi
ln(
q2αi
q2αi − ω
)(11)
and
ω ≤ max q2αi
(1 − ν2
ν1
), (12)
(c) if x1i > 0 and x2
i > 0, then
pi =q1ν1 + q2ν2
λi(αi − ω), (13)
x1i =
1λi
ln(
αi(q1ν1 + q2ν2)ν1(αi − ω)
), (14)
x2i =
1λi
ln(
αi(q1ν1 + q2ν2)ν2(αi − ω)
)(15)
and
max{
q1αi
(1 − ν1
ν2
), q2αi
(1 − ν2
ν1
)}< ω ≤ αi. (16)
Proof. First note that since pi > 0 at least for one point i the Lagrange multipliersby (2) and (3) as well as ω have to be positive. Next note that pi > 0 for any i. Sinceif we assume that there is an i such that pi = 0, then, by (2) and (3), x1
i = 0, x2i = 0.
1250052-5
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
Thus, by (4), ω = 0. This contradiction proves that pi > 0 for any i. (a) Since pi > 0,x1
i > 0 and x2i = 0, (2) and (4) imply that
αiλipi exp(−λix1i ) = ν1, (17)
q1αi(1 − exp(−λix1i )) = ω (18)
and (4) yields that
αiλipi ≤ ν2. (19)
By (18) we have that
ω ≤ q1αi. (20)
By (17),
x1i =
1λi
ln(
αipiλi
ν1
). (21)
Substituting this xi into (18) yields the following equation for pi:
q1(αpiλi − ν1)piλi
= ω,
which implies (7). Substituting (7) into (18) yields (8). By (19) and (7), we have that
ν1q1αi
q1αi − ω≤ ν2.
Thus, taking into account (20) we obtain (9).(b) Follows from (a) by symmetry.(c) Since pi > 0, x1
i > 0 and x2i > 0, (2)–(4) imply that
αiλipi exp(−λix1i ) = ν1, (22)
αiλipi exp(−λix2i ) = ν2 (23)
and
q1αi(1 − exp(−λix1i )) + q2αi(1 − exp(−λix
2i )) = ω. (24)
By (22) and (23) we have that
x1i =
1λi
ln(
αipiλi
ν1
), x2
i =1λi
ln(
αipiλi
ν2
). (25)
Substituting (25) into (24) implies
αiλipi − q1ν1 − q2ν2
piλi= ω
solving which we obtain (13). Substituting (13) into (25) yields (14) and (9).
1250052-6
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
We can rewrite the equations in the previous theorem in a more compact form, bydividing the parameter space into subsets I10, I01, I11 that describe which searcherperforms the search (the first, the second, or both of them).
Theorem 3. Each equilibrium has to be of the form ((x1, x2), p) = ((x1(ω, ν1, ν2),x2(ω, ν1, ν2)).p(ω, ν1, ν2)), where
pi(ω, ν1, ν2) =
q1ν1
λi(q1αi − ω), i ∈ I10(ω, ν1, ν2),
q2ν2
λi(q2αi − ω), i ∈ I01(ω, ν1, ν2),
q1ν1 + q2ν2
λi(αi − ω), i ∈ I11(ω, ν1, ν2),
(26)
x1i (ω, ν1, ν2) =
0, i ∈ I01(ω, ν1, ν2),
1λi
ln(
q1αi
q1αi − ω
), i ∈ I10(ω, ν1, ν2),
1λi
ln(
αi(q1ν1 + q2ν2)ν1(αi − ω)
), i ∈ I11(ω, ν1, ν2),
(27)
x2i (ω, ν1, ν2) =
0, i ∈ I10(ω, ν1, ν2),
1λi
ln(
q2αi
q2αi − ω
), i ∈ I01(ω, ν1, ν2),
1λi
ln(
αi(q1ν1 + q2ν2)ν2(αi − ω)
), i ∈ I11(ω, ν1, ν2)
(28)
for some positive ω, ν1, and ν2, where
I10(ω, ν1, ν2) ={
i ∈ [1, n] : ω ≤ q1αi
(1 − ν1
ν2
)},
I01(ω, ν1, ν2) ={
i ∈ [1, n] : ω ≤ q2αi
(1 − ν2
ν1
)},
I11(ω, ν1, ν2) ={
i ∈ [1, n] : max{q1αi
(1 − ν1
ν2
), q2αi
(1 − ν2
ν1
)}< ω ≤ αi
}.
(29)
It is clear that for a fixed ν1 and ν2 either I10(ω, ν1, ν2) or I01(ω, ν1, ν2) is empty,namely, the following result holds.
Lemma 1. (a) If ν1 > ν2, then
I10(ω, ν1, ν2) = ∅,
I11(ω, ν1, ν2) ={
i ∈ [1, n] : q2αi
(1 − ν2
ν1
)< ω ≤ αi
}.
1250052-7
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
(b) If ν1 < ν2, then
I01(ω, ν1, ν2) = ∅,
I11(ω, ν1, ν2) ={
i ∈ [1, n] : q1αi
(1 − ν1
ν2
)< ω ≤ αi
}.
It turns out that there is a straight correspondence between the total searchresources and the Lagrangian multipliers.
Theorem 4. If x1 > x2, then ν1 < ν2. If x1 < x2 then ν1 > ν2.
Proof. Suppose, contrary to our claim, that x1 > x2 and ν1 > ν2. Then fori ∈ I11(ω, ν1, ν2)
x1i (ω, ν1, ν2) =
1λi
ln(
αi(q1ν1 + q2ν2)ν1(αi − ω)
)
<1λi
ln(
αi(q1ν1 + q2ν2)ν2(αi − ω)
)= x2
i (ω, ν1, ν2).
Thus, since by the above lemma, I10(ω, ν1, ν2) = ∅, we have that
x1 =n∑
i=1
x1i (ω, ν1, ν2) <
n∑i=1
x2i (ω, ν1, ν2) = x2.
This contradiction completes the proof of the theorem.
4. The Main Result
In this section, we find the equilibrium strategies in a closed form and prove theiruniqueness. First note that the optimal ω, ν1, and ν2 have to be found from thecondition that all the search resources have to be applied and p is a probabilityvector. This leads to the following conditions:
n∑i=1
xti(ω, ν1, ν2) = xt, t = 1, 2,
n∑i=1
pi(ω, ν1, ν2) = 1,
which are equivalent to:
H1S(ω, ν2/ν1) = x1, (30)
H2S(ω, ν1/ν2) = x2, (31)
HH(ω, ν1, ν2) = 1, (32)
1250052-8
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
where
H1S(ω, τ) =
∑i∈[1,n]:ω≤q1αi(1−1/τ)
1λi
ln(
q1αi
q1αi − ω
)
+∑
i∈[1,n]:max{q1αi(1−1/τ),q2αi(1−τ)}<ω≤αi
1λi
ln(
αi(q1 + q2τ)αi − ω
), (33)
H2S(ω, τ) =
∑i∈[1,n]:ω≤q2αi(1−τ)
1λi
ln(
q2αi
q2αi − ω
)
+∑
i∈[1,n]:max{q1αi(1−1/τ),q2αi(1−τ)}<ω≤αi
1λi
ln(
αi(q1/τ + q2)αi − ω
)(34)
and
HH(ω, ν1, ν2) =∑
i∈I10
q1ν1
λi(q1αi − ω)
+∑i∈I01
q2ν2
λi(q2αi − ω)+∑i∈I11
q1ν1 + q2ν2
λi(αi − ω). (35)
Without loss of generality we can assume that
x1 < x2. (36)
Then, by Theorem 4,
ν1 > ν2, so τ = ν2/ν1 < 1. (37)
Thus, by (33) and (34),
H1S(ω, τ) =
∑i∈[1,n]:q2αi(1−τ)<ω≤αi
1λi
ln(
αi(q1 + q2τ)αi − ω
), (38)
H2S(ω, 1/τ) =
∑i∈[1,n]:ω≤q2αi(1−τ)
1λi
ln(
q2αi
q2αi − ω
)
+∑
i∈[1,n]:q2αi(1−τ)<ω≤αi
1λi
ln(
αi(q1/τ + q2)αi − ω
). (39)
Function H1S(ω, τ) has the following properties. It is continuous on ω and τ , it is
increasing on ω and τ . For a fixed τ , H1S(αmin − 0, τ) = ∞, where αmin = mink αk
and H1S(0+, τ) = 0. Thus, for a fixed τ > 0 there is ω(τ) such that
H1S(ω(τ), τ) = x1.
1250052-9
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
This function ω(τ) is decreasing on τ and
ω(0+) = ω0, ω(1) = ω1,
where ω0 is the root in (0, αmin) of the equation:
∑i∈[1,n]:q2αi<ω≤αi
1λi
ln(
q1αi
αi − ω
)= x1 (40)
and ω1 is the root in (0, αmin) of the equation:
∑i∈[1,n]:ω≤αi
1λi
ln(
αi
αi − ω
)= x1.
Similarly, H2S(ω, 1/τ) has the following properties. It is continuous on ω > 0 and
τ ∈ (0, 1], it is increasing on ω and decreasing on τ . Then function HS(τ) :=H2
S(ω(τ), 1/τ) is continuous and decreasing on τ . Also, by (40) and (36)
HS(1) =∑
i∈[1,n]:ω≤αi
1λi
ln(
αi
αi − ω(τ)
)= x1 < x2.
Also, HS(0+) = ∞. Thus, there is the unique τ∗ such that HS(τ∗) = x2.
Finally, note that
HH(ω, ν1, ν2) = ν1HH(ω, τ) for ν1 > ν2,
where
HH(ω, τ) =∑
i∈[1,n]:ω≤q2αi(1−τ)
q2τ
λi(q2αi − ω)+
∑i∈[1,n]:q2αi(1−τ)<ω≤αi
q1 + q2τ
λi(αi − ω).
Thus, ν1 = 1/HH(ω(τ∗), τ∗) is optimal. So we have obtained the following result:
Theorem 5. The game has the unique equilibrium and it is given by Theorem 3,
where the optimal ω, ν1, ν2 are given as follows
(a) If x1 < x2, then ω = ω(τ∗), where τ∗ is the unique root of the equation HS(τ∗) =x2, ν1 = 1/HH(ω(τ∗), τ∗) and ν2 = ν1τ∗.
(b) The case x1 > x2 can be considered by symmetry.
5. Some Remarks on Arbitrary Resource Distributions
In this paper, we consider the scenario, where the hider does not know the value ofthe searcher’s resources. The hider only knows that it could be one of two values(small or large) and he knows its distribution. It is natural to wonder whether ourresult remains valid if this distribution contains more than two values. It turns out
1250052-10
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
that most of the analysis remains valid, but there is a complication. An equilib-rium point is in the intersection of level surfaces, which are nonlinear. In higherdimensions, it becomes much harder to decide whether the surfaces intersect in asingle point.
Suppose that the hider knows that the distribution of the resources is xr
(r ∈ [1, R]) with probability qr, where∑R
r=1 qr = 1. In analogy of Eqs. (2)–(4)we find
αiλipi exp(−λixri )
{= νr for xr
i > 0,
≤ νr for xri = 0
(41)
for r ∈ [1, R], and
R∑r=1
qrαi(1 − exp(−λixri )) = ω. (42)
Let Ir = {i ∈ [1, n] : xri > 0} be the subset of locations that are being searched by
the searcher of type r and Bi = {r ∈ [1, R] : xri > 0} be the set of searcher’s type
that looks at point i. Then, by (41) and (42), the equilibrium (p, (x1, . . . , xR)) hasto be given as follows:
xri = xr
i (ω, ν1, . . . , νR)
=1λi
ln
(αi
αi
∑t∈Bi
qt − ω
∑t∈Br qtνt
νr
), i ∈ [1, n], r ∈ [1, R] (43)
and
pi = pi(ω, ν1, . . . , νR) =1λi
∑t∈Bi
qtνt
αi
∑t∈Bi
qt − ω, i ∈ [1, n]. (44)
These ω, ν1, . . . , νR can be found as a solution of the equations:
HrS(ω, ν1, . . . , νR) :=
n∑i=1
xri (ω, ν1, . . . , νR) = xr , r ∈ [1, R], (45)
HH(ω, ν1, . . . , νR) :=n∑
i=1
pi(ω, ν1, . . . , νR) = 1. (46)
Now we focus on the case of R = 3 to investigate how to find a solution of (45) and(46) and on its way also to prove its uniqueness. Without loss of generality, we canassume that x1 < x2 < x3. Then ν1 > ν2 > ν3 and I1 ⊆ I2 ⊆ I3 = [1, n].
Following the approach suggested into this paper we have to look at the relations:
H1S(ω, ν1, ν2, ν3) =
∑I1
1λi
ln(
αi
αi − ω
q1ν1 + q2ν2 + q3ν3
ν1
),
1250052-11
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.

2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
H2S(ω, ν1, ν2, ν3) =
∑I1
1λi
ln(
αi
αi − ω
q1ν1 + q2ν2 + q3ν3
ν2
)
+∑I2\I1
1λi
ln(
αi
(q2 + q3)αi − ω
q2ν2 + q3ν3
ν2
),
H3S(ω, ν1, ν2, ν3) =
∑I1
1λi
ln(
αi
αi − ω
q1ν1 + q2ν2 + q3ν3
ν3
)
+∑I2\I1
1λi
ln(
αi
(q2 + q3)αi − ω
q2ν2 + q3ν3
ν3
)
+∑I3\I2
1λi
ln(
αi
q3αi − ωq3
).
The sums in these functions depend on the parameters τ = ν2/ν1 and σ = ν3/ν1
and as before we may use notation HjS(ω, τ, σ) := Hj
S(ω, ν1, ν2, ν3) for j ∈ [1, 3].Up to here the analysis is completely analogous, but now we come to the pointwhere we have to establish that there is a unique equilibrium point, i.e., that thethree surfaces Hj
S = xj intersect in exactly one point. As before the three sumsHj
S are increasing with ω. The sum H1S increases with σ and τ while H3
S decreaseswith these parameters. The sum H2
S increases with σ but decreases with τ . Now atopological argument can be used again to show that the surfaces have a commonpoint, so an equilibrium exists — and there is an algorithm to find it — but toestablish uniqueness, we need more.
The difficulty of these equations is that I1 and I2 can be proper subsets, andindeed in general they are. If I1 is equal to I3, then the equations reduce to∑
I3
1λi
ln(
αi(q1ν1 + q2ν2 + q3ν3)αi − ω
)−∑I3
ln νj
λi= xj .
The first sum in this equation is independent of j. One quickly verifies that the ratiosτ and σ now are independent of the value of that sum. To solve Hj
S(ω, σ, τ) = xj
we need to adjust ω only, having preset the parameters τ and σ, as it were, insuch a way that they are in tune once ω solves one of the equations Hj
S = xj . Itimmediately follows that the equilibrium is unique. Now if I1 is a proper subset,then the analysis becomes more intricate. Since the equilibrium varies continuouslywith the parameters, it does seem likely that it remains unique. However, a solutionto this problem seems difficult and requires a more sophisticated way of handlingthe equations.
6. Numerical Illustration
We include a numerical illustration, to demonstrate in what way the distribu-tion of the search resources influence a player’s behavior. We consider a five-point
1250052-12
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.
2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
(a) (b)
(c)
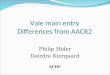
Fig. 1. The equilibrium payoffs to the hider (a) and to the searcher of Type 1 (b) and Type 2.
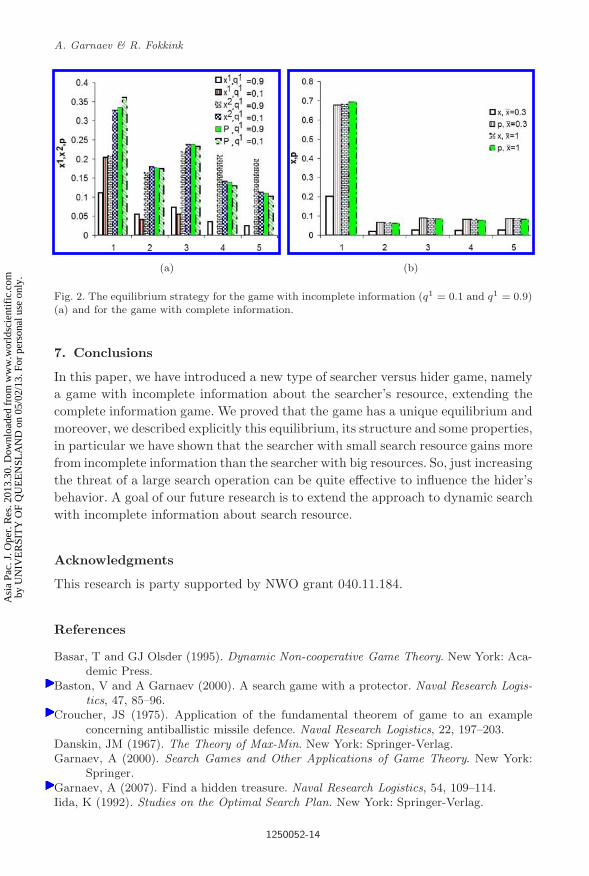
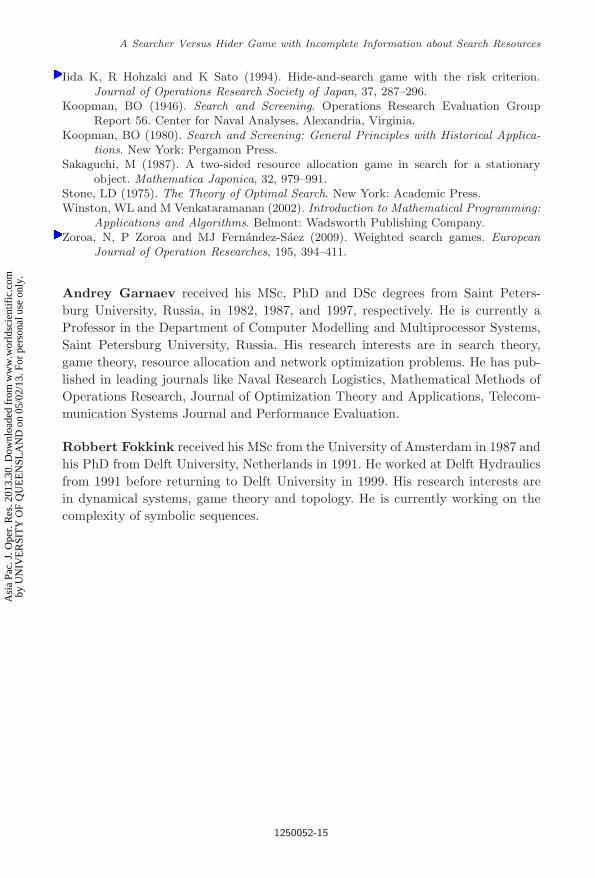
(allocation) network (n = 5), initial detection probability α = (0.1, 0.2, 0.2, 0.4, 0.5),detection coefficients λ = (0.9, 0.8, 0.6, 0.5, 0.5), the total resource of the searcher ofType 1 (2) equals to x1 = 0.3 (x2 = 0.3, 1, 2) and the probability q1 varying from0 to 1. Figure 1 shows that increasing resources lead to decreasing hider payoff.Decreasing the probability that the large resources are applied reduces the payoffof the searcher with small resources. This illustrates that just the threat of a largesearch operation significantly increases the searcher’s payoff. Figure 2 shows that inthe case of incomplete information, the searcher with small resources focuses onlyon the search points with smallest probability of detection. Meanwhile, the searcherwith large resources distributes the search efforts among all the points.
1250052-13
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.
2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A. Garnaev & R. Fokkink
(a) (b)
Fig. 2. The equilibrium strategy for the game with incomplete information (q1 = 0.1 and q1 = 0.9)(a) and for the game with complete information.
7. Conclusions
In this paper, we have introduced a new type of searcher versus hider game, namelya game with incomplete information about the searcher’s resource, extending thecomplete information game. We proved that the game has a unique equilibrium andmoreover, we described explicitly this equilibrium, its structure and some properties,in particular we have shown that the searcher with small search resource gains morefrom incomplete information than the searcher with big resources. So, just increasingthe threat of a large search operation can be quite effective to influence the hider’sbehavior. A goal of our future research is to extend the approach to dynamic searchwith incomplete information about search resource.
Acknowledgments
This research is party supported by NWO grant 040.11.184.
References
Basar, T and GJ Olsder (1995). Dynamic Non-cooperative Game Theory. New York: Aca-demic Press.
Baston, V and A Garnaev (2000). A search game with a protector. Naval Research Logis-tics, 47, 85–96.
Croucher, JS (1975). Application of the fundamental theorem of game to an exampleconcerning antiballistic missile defence. Naval Research Logistics, 22, 197–203.
Danskin, JM (1967). The Theory of Max-Min. New York: Springer-Verlag.Garnaev, A (2000). Search Games and Other Applications of Game Theory. New York:
Springer.Garnaev, A (2007). Find a hidden treasure. Naval Research Logistics, 54, 109–114.Iida, K (1992). Studies on the Optimal Search Plan. New York: Springer-Verlag.
1250052-14
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.
2nd Reading
January 8, 2013 11:10 WSPC/S0217-5959 APJOR 1250052.tex
A Searcher Versus Hider Game with Incomplete Information about Search Resources
Iida K, R Hohzaki and K Sato (1994). Hide-and-search game with the risk criterion.Journal of Operations Research Society of Japan, 37, 287–296.
Koopman, BO (1946). Search and Screening. Operations Research Evaluation GroupReport 56. Center for Naval Analyses, Alexandria, Virginia.
Koopman, BO (1980). Search and Screening: General Principles with Historical Applica-tions. New York: Pergamon Press.
Sakaguchi, M (1987). A two-sided resource allocation game in search for a stationaryobject. Mathematica Japonica, 32, 979–991.
Stone, LD (1975). The Theory of Optimal Search. New York: Academic Press.Winston, WL and M Venkataramanan (2002). Introduction to Mathematical Programming:
Applications and Algorithms. Belmont: Wadsworth Publishing Company.Zoroa, N, P Zoroa and MJ Fernandez-Saez (2009). Weighted search games. European
Journal of Operation Researches, 195, 394–411.
Andrey Garnaev received his MSc, PhD and DSc degrees from Saint Peters-burg University, Russia, in 1982, 1987, and 1997, respectively. He is currently aProfessor in the Department of Computer Modelling and Multiprocessor Systems,Saint Petersburg University, Russia. His research interests are in search theory,game theory, resource allocation and network optimization problems. He has pub-lished in leading journals like Naval Research Logistics, Mathematical Methods ofOperations Research, Journal of Optimization Theory and Applications, Telecom-munication Systems Journal and Performance Evaluation.
Robbert Fokkink received his MSc from the University of Amsterdam in 1987 andhis PhD from Delft University, Netherlands in 1991. He worked at Delft Hydraulicsfrom 1991 before returning to Delft University in 1999. His research interests arein dynamical systems, game theory and topology. He is currently working on thecomplexity of symbolic sequences.
1250052-15
Asi
a Pa
c. J
. Ope
r. R
es. 2
013.
30. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F Q
UE
EN
SLA
ND
on
05/0
2/13
. For
per
sona
l use
onl
y.