Embed Size (px)
Citation preview

Research ArticleA Robust Passive Intrusion Detection System with CommodityWiFi Devices
Enjie Ding ,1 Xiansheng Li ,1,2 Tong Zhao,1,2 Lei Zhang ,1,2 and Yanjun Hu2
1IoT Perception Mine Research Center, China University of Mining and Technology, Xuzhou 221008, China2School of Information and Control Engineering, China University of Mining and Technology, Xuzhou 221008, China
Correspondence should be addressed to Lei Zhang; [email protected]
Received 24 December 2017; Accepted 18 April 2018; Published 3 June 2018
Academic Editor: Oleg Lupan
Copyright © 2018 Enjie Ding et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
In recent years, due to the rapidly growing capacities of physical layer, device-free passive detection holds great importance for abroad range of application. Most recent works focus on motion detection, intrusion detection, and vital sign with commodityWiFi devices in the indoor environment. Conventional device-free motion detection techniques, which utilize received signalstrength (RSS), may suffer from coarse granularity and high variability problems. In resorting to the finer-grained channel stateinformation (CSI), we propose PhaseMode, a novel approach for device-free motion detection leveraging CSI phase differencedata between adjacent antenna pairs. We implement our approach on commercial WiFi devices and validate its performance.We conduct experiments in different test periods of three indoor environments; the results show that the proposed schemeachieves an average accuracy over 99.4% of motion detection in different scenarios.
1. Introduction
Device-free passive detection has been an emergingtechnology to detect entities without carrying any device overthe last decade [1, 2]. Many applications have been developedto improve people’s experience, including human detectionfor intrusion detection, human behavior recognition, anddetection of living people in a fire environment. There aremany existing methods, which can achieve intrusion detec-tion, such as camera-based, sensor-based, and RSS-based.Camera-based approaches use a camera installed in themonitoring environment to achieve passive activity recogni-tion by capturing the video screams and analyzing theimages. However, it can only be employed in lightingenvironments, and the line-of-sight (LOS) condition is indis-pensable. Furthermore, its main issues include the potentialprivacy leakage and high false alarm rate. The sensor-basedmethods leverage body-attached motion sensors such asaccelerometers or a gyroscope to collect the information onpeople’s activities and behaviors, but these approaches mayhave a high false alarm rate caused by the environmental
disturbance. Attaching a sensor on the body is a limita-tion for some people may feel inconvenient and somescenarios are not applicable for wearing sensors. Moreover,all these approaches share the requirement of infrastructureinstallation in the environment.
Due to the recent development in wireless networktechniques and smart devices, a range of applications havebeen explored, including motion detection [3–6], gesturerecognition [7], indoor localization [8, 9], and activity identi-fication [10–12]. We can use pervasive WiFi signals to realizepassive detection of moving targets by detecting whetherthere exists any wireless content changes in the surroundingenvironment without attaching any proposed device to users.Received signal strength (RSS) has been used successfully fordevice-free passive localization for wireless environmentsbecause it is easy to access the existing wireless infrastruc-tures. When an object intrudes the monitoring area, thesignal between receiver and transmitter attenuated. RSS-based approaches exploit variations in RSS measurementsto infer dynamic environment changes. Although RSS ishandy to use, it is not a stable metric as it suffers from
HindawiJournal of SensorsVolume 2018, Article ID 8243905, 12 pageshttps://doi.org/10.1155/2018/8243905

coarse granularity and high susceptibility to environmentalnoise interference.
In recent years, since channel state information (CSI)becomes available with commodity devices. More and moreresearchers have resorted to the robust and finer-grainedphysical layer metrics for device-free motion detection, anda range of systems [3–5, 11, 13, 14] have been proposed todetect human’s activities and environmental changes. CSIcontains both amplitude and phase measurements separatelyfor each OFDM subcarrier, which reflects the varyingmultipath reflection caused by people’s existence due to itssignificant frequency diversity. Compared with RSS, CSIprovides fine-grained channel information in the physicallayer, which can now be read from modified device driversfor several off-the-shelf WiFi network interface cards(NIC), such as the Intel WiFi Link 5300 NIC [15] and theAtheros AR9580 chipset [16]. Although some previous worksmake great progress with the physical layer CSI amplitudeand phase information, few works use the more sensitiveCSI phase difference.
In this paper, we propose a novel scheme termed Phase-Mode, WiFi-based important area intrusion detection, fordevice-free passive human detection, by exploiting CSI phasedifference data. Different from previous works, we derive theuseful phase information from phase difference data betweenadjacent antenna pairs to monitor the environment changes.Actually, phase difference is more robust than amplitude,which usually exhibits large fluctuations because of theattenuation over the link distance, obstacles, and the multipatheffect [17]. To achieve this, we firstly pass the raw CSI mea-surements to the preprocessing module to eliminate the signif-icant random noise and sift out biased observations. Weextract phase difference from the processed phase in neighbor-ing antennas. Afterwards, we extract maximum eigenvalue ofcovariance matrix as the novel features from the processedphase difference data. Finally, we introduce machine-learningalgorithms including the support vector machine (SVM),random forest (RF), and K-nearest neighbor (KNN) to classifythe feature values for distinguishing motion detection.
To validate our system, we construct the prototype ofPhaseMode on commodity off-the-self (COTS) WiFi devicesand evaluate its performance in three indoor scenarios,including laboratory, meeting room, and corridor. Experi-ment results demonstrate that PhaseMode achieves bothTN rate for static scenario and TP rate for dynamic scenarioover 99.4% on average.
In summary, the main contributions of our work areas follows:
(1) We propose a design for robust passive device-freehuman detection with commodity WiFi devices. Weleverage only phase difference information of CSI asa metric for device-free human detection.
(2) Different from using the correlation of CSI informa-tion (amplitude and phase) in the time dimension,we explore the subcarrier dimension informationwith frequency diversity and extract more sensitiveand robust features in subcarrier dimension.
(3) We explore the space diversity provided by multian-tennas supported by modern MIMO systems andextract the features from the phase difference betweenadjacent antennas. We adopt the SVM, random forest,and K-nearest neighbor machine learning classifica-tion algorithm to detect the intrusion.
(4) We analyze some key factors such as the number offeatures and size of sliding window and sum uphow it affects the detection accuracy.
(5) We conduct experiments and validate the perfor-mance in three different environments (corridor,meeting room, and laboratory). Experiment resultsshow that it can achieve both TN rate for human-free and TP rate for human moving scenario over99.4%, transcending existing passive device-freehuman detection schemes.
The remainder of the paper is organized as follows. Wefirst review the related work in Section 2. In Section 3, webriefly introduce some preliminaries about CSI and MIMO.Section 4 presents an overview of the system architecture,while the detailed design of each component is provided inSection 5. Section 6 elaborates the experiment settings andperformance evaluation. Finally, conclusion are presentedin Section 7.
2. Related Works
Device-free motion detection has drawn much attention inthe past decade [1, 2]. In this section, we primarily reviewthe related work from two categories of techniques, that is,RSS-based and CSI-based.
2.1. RSS-Based Detection. RSS is especially attractive fordevice-free motion detection due to its handy accessibilitywith commodity devices. It mainly relies on the receivedsignal strength changes caused by target presence andmotion. More specifically, a large value of RSS variancegenerally indicates a moving target in the monitoring areawhereas a small value infers none. Youssef et al. and Moussaand Youssef [1, 18] firstly introduced the concept of device-free passive and proposed a maximum likelihood estimator-based algorithm (MLE) to improve the performance of DFPsystems in the real environment. The most well-knownRSS-based device-free motion should be the radio tomo-graphic imaging (RTI) [19], which deploys a wireless sensornetwork around the interesting area and uses the RSS mea-surements to obtain images of moving targets. Wilson andPatwari also proposed vRTI in [20], as an extension of theRTI technique, which leverages the motion-induced varianceof RSS measurement within a wireless network. In RASIDsystem [21], Kosba et al. improve the detection accuracy byadopting standard deviation of RSS as the feature approxi-mates its distribution with a kernel function and leverages anonparametric technique for adapting to environmentchanges. Since RSS signal is too sensitive to the slight varia-tion of the environment, a robust device-free localization(DFL) scheme based on differential RSS is proposed [22],
2 Journal of Sensors

which can eliminate the need of acquiring reference RSSmeasurements as well as overcome the negative effectenvironment induced.
Since RSS schemes suffer from coarse granularity of1 dB and limited accuracy, researchers begin to pay moreattention to CSI-based schemes owing to its frequencydiversity [11].
2.2. CSI-Based Detection. Many finer-grained CSI-basedschemes have been implemented to realize better detectionin recent years since we can extract CSI from commoditywireless NICs, that is, Intel 5300 [15] and Atheros [16].Compared with RSS feature, CSI can be a more fined-grained signal feature, which characterizes the multipatheffect at the granularity of the OFDM subcarrier in thefrequency domain [23]. Similar to an RSS-based scheme,most CSI-based detection systems also leverage variationsin CSI measurement to alarm target presence or intrusion.Xiao et al. proposed both Pilot [8] and FIMD [6] systemsbased on the perspective that CSI streams maintain temporalstability in a static environment. FIMD realizes device-freemotion detection by leveraging the eigenvalues of a CSI-based correlation matrix in a given time period. Pilotleverages the correlation of CSI over time to monitorabnormal appearance and further locate the entity. PADS[3] and DeMan [4] further exploit full information (bothamplitude and phase) of CSI, extracting the maximumeigenvalues of the covariance matrix from successive CSI toenhance detection performance. OmniPHD [24] achievesthe omnidirectional sensing coverage for passive humandetection in typical multipath-rich indoor scenarios. Wanget al. [13] propose a local outlier factor using an anomalydetection algorithm to detect the anomaly change in wirelesssignal. E-eyes [10] leverages the moving average and proba-bility distribution of CSI measurements to identify thepresence of an activity or not. Researcher also exploits thecharacteristics of CSI to detect the moving target throughthe wall [5], monitor multiperson breathing beats [17], andanalyze customer’s product preference [25]. CARM [12]was proposed, a model-based approach, which is morerobust to environmental changes.
Most of the previous works have exploited the CSIamplitude and leveraged phase information, but few workspay attention to phase difference. In this paper, we explorephase difference for passive device-free motion detection.
3. Preliminaries
In this section, we briefly introduce the characteristics of CSIand MIMO technology used in device-free detection.
3.1. Channel State Information. In the wireless communica-tion system, CSI not only describes the channel propertiesof the communication link in the subcarrier level but alsorepresents what a signal has undergone while passingthrough the subcarriers and reveals the combined effectowing to fading, scattering, and path loss. In OFDM, thetransmitting data stream is partitioned into multiple narrowand orthogonally overlapped subcarriers, and data stream is
transmitted over all subcarriers using the same modulationand coding scheme (MCS) to restrain frequency selectivefading. In a narrow-band flat fading channel, the WiFiOFDM system viewed in the frequency domain can berepresented as follows:
Yi =HXi +Ni, 1
where Yi is the received signal vectors, Xi denotes transmit-ted signal vectors,H is the channel matrix, and Ni representsthe additive white Gaussian noise (AWGN).
In the WiFi OFDM system, 56 subcarriers can beavailable for data transmission with a 20MHz bandwidthchannel. However, the slightly modified Intel 5300 NICdevice driver can only capture 30 subcarriers using the chan-nel bonding technique, which can be expressed as follows:
H = H f1 , H f1 ,… , H f i , , i ∈ 1,N , 2
where H f i is the CSI vector at the subcarrier i with central
frequency f i. Each CSI H f i depicts the amplitude ∣H f i ∣and phase ∠H f i of OFDM subcarrier i:
H f i = H f i ej∠H f i 3
3.2. Multiple Input and Multiply Output (MIMO). MIMOtechniques have revolutionized the wireless communicationover the past decade. It is an approach for increasing networkbandwidth, range, and reliability leveraging multiple anten-nas at the transmitter and receiver to exploit multipath prop-agation. MIMO is an essential element of IEEE 802.11n(WiFi). In a MIMO system, the combination of Nt transmit-ters and Nr receivers can be considered as a separate TX-RXdata stream, and we can express the CSI data screamsas follows:
HMIMO =
H11 H12 ⋯ H1Nr
H21 H22 ⋯ H2Nr
⋮ ⋮ ⋯ ⋮
HNt1 HNt2 ⋯ HNtNr
, 4
where HNtNris a vector describing the CSI of 30 subcarriers
between the Ntth transmitters and the Nrth receivers. Sinceeach TX-RX data stream occupies different paths in themultipath environment, the HNtNr
is distinguishing, whichresults in distinctive CSIs received at different antennas.
4. Overview
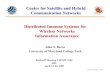
In the section, we elaborate the overall architecture of oursystem mainly consisting of four components: sensing, datapreprocessing, feature extraction, and intrusion detectionmodule as shown in Figure 1. The first sensing module wasused to sense the changes of the channel and collect CSI datafrom the commodity off-the-shelf Intel 5300 NIC and thenpass the raw CSI measurements through a data preprocessing
3Journal of Sensors

module to sift the occasional outliers and eliminate the phaserandom noise.
To compare the performance between CSI amplitude andphase difference information to detect the intrusion target,we firstly construct the covariance matrices of a normalizedversion of amplitude and phase difference data for each sub-carrier then calculate the corresponding three maximumeigenvalues for each correlation matrix. The maximumeigenvalues are combined into a six-dimensional feature toinfer the presence of moving people. The extracted featuresare fed to three different machine learning classificationmodels to search for a separation line between humanpresence and absence. Finally, for the multiple antennas inmodern MIMO systems, we select the best values accordingto the detection results of every TX-RX antenna pair toenhance the detection accuracy and robustness.
5. Methodology
In this section, we elaborate the design of our system Phase-Mode by real measurements. Moreover, the system consistsof four functional modules: sensing, data preprocessing,feature extraction, and intrusion detection. As shown inFigure 1, in the sensing module, we collect the raw CSI dataat the receiver side with three antennas of a commodity WiFidevice, then fed raw CSI streams into data preprocessingmodule to filter the noise and outliers as well as get the phasedifference. In the feature extraction module, we extract fea-tures from the phase difference and pass it to the intrusiondetection module to detect whether there is a person or amoving object in the area.
5.1. Data Preprocessing. In the preliminary part, we knowthat the amplitude and phase of each CSI can be representedas follows:
H f i = ∣H f i ∣ ej∠H f i , 5
where ∣H f i ∣ and ∠H f i denote the amplitude and phaseresponse of the subcarrier i, respectively. H f i is the CSI atthe subcarrier i i ∈ 1, 30 with central frequency of f i.We collect the consecutive CSI streams and split it into
equal length sequence with a specific time window tomonitor changes in the environment. It can be denoted asthe following.
H = H1,H2,… ,HT 6
We then use the T measurements of CSI as the basicinput for the detection process; it first pass through a phaseextraction process and then an outlier filtering process to siftout the outliers and some noise.
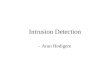
5.1.1. Outlier Removal. Due to the environmental noises aswell as some protocol specifications, there exists some outlierobservations, which are obviously not caused by humanmovement and should be sifted before human detection.Figure 2 illustrates the outliers contained in the raw CSIcollected in the human-free scenario. To identify and removethese biased outliers, we adopt a Hampel identifier [26],which declares all points falling out of the closed intervalμ − γ ∗ σ, μ + γ ∗ σ as outliers, where μ and σ are themedian and the median absolute deviation (MAD) of the
Featureextraction
Outlier removal
Noise filtering
Classificationalgorithm
Phase difference
Presence
SensingData
preprocessing
Intrusion detection
AbsenceTX
RX
CSI Data
Figure 1: Overview of system architecture.
0
10
20
30
40
50
CSI a
mpl
itude
50
Subcarrier 1Subcarrier 10Outliers
100 150 200 250 3000Packets index
Figure 2: Outlier removal on subcarrier number 1 and number10 for CSI.
4 Journal of Sensors

data sequence, respectively. γ is application dependent andthe most widely used value is 3. We apply the Hampelidentifier on all 30 subcarriers. Figure 2 shows the CSI oftwo subcarriers (number 1 and number 10) before and afterperforming outlier removal. We can see that the Hampelfilter can effectively sift out the significant abrupt changes.
5.1.2. Noise Filtering. Since the collected CSI measurementsare easily disturbed by environmental noise including elec-tromagnetic interference and other motions, before extract-ing feature from amplitude, we apply a median filter to theCSI amplitude data to remove the high frequency noise andhigh amplitude impulse, which is unlikely to be caused byhuman’s motions. We adopt a 2-point median filter to allthe 30 subcarriers as shown in Figure 3.
5.1.3. Phase Difference Extraction. In this section, we use thephase difference between two adjacent antennas to removethe randomness caused by the unsynchronized time andfrequency as well as environment noise. From [27], we knowthat phase difference is more robust and sensitive to theenvironment than amplitude because it is the sum of individ-ual variance between two antennas.
Firstly, we validate that the measured phase differencevalues between the neighbor antenna pairs are highlystable with the successively received packets. The measuredCSI phase ∠hi in the ith subcarrier can be expressed asfollows [28]:
∠hi = ∠hi − 2π kiNδi + β + Zi, 7
where ∠hi and ∠hi represent the measured CSI phase and thetrue phase values of the ith subcarrier, respectively. δiindicates the timing lag at the receiver due to SFO, and β isan unknown phase offset caused by CFO. Zi is somemeasurement noise. ki ranging from 1 to 30 denotes theindex of the ith subcarriers; N is the FFT size (equals to 64from IEEE 802.11n specification). Due to the δi, β, and theZi, it is infeasible to obtain the true phase information. AsFigure 4 shows, the raw CSI phase data are randomlydistributed, which caused by the variable δi. Sen et al. [29]present a linear transformation method, which can removethe random noise of the raw phase data effectively.
Due to the three antennas on the same NIC, we know thatthe antennas have same sampling clock and downconverterfrequency [30]. The measured phase difference on the ithsubcarrier is given as follows:
Δ∠hi = Δ∠hi − 2π kiNΔδi + Δβ + ΔZi, 8
where Δ∠hi = ∠hi,1 − ∠hi,2 and Δ∠hi = ∠hi,1 − ∠hi,2 are themeasured CSI phase difference and the true phase differencevalues of the ith subcarrier, respectively. Δδi = δi,1 − δi,2 is thetiming lag difference at the adjacent receiver antennas. Δβ isthe unknown phase offset difference, and ΔZi is some mea-surement noise difference. The three receiver antennas areplaced at a distance of half the wavelength from each other,and denote λ as the wavelength, c as the light speed, f as
Subcarrier0
1020
300
20
40
60
CSI a
mpl
itude
300
Packets
200100
0
(a) Raw CSI measurements
Subcarrier010
2030
0
10
20
30
CSI a
mpl
itude
300
Time (s)
200100
0
(b) All subcarriers of filtered
Figure 3: Noise filtering for raw CSI amplitude.
270240
210
180
150
12090 40
60
30
0
330
300
30
20
10
Raw dataAntenna number 1-antenna number 2Antenna number 2-antenna number 3
Figure 4: Raw phase data (marked as blue dot) and the phasedifference data (marked as red cross and green circle).
5Journal of Sensors

the center frequency, θ as the angle of arrival, and Ts as thesample interval (Ts is 50 ns with 20MHz bandwidth). Wecan roughly estimate the Δδi as follows:
Δδi =λ sin θ
2cTs≤
12f Ts
9
As we select the WiFi setting running on 2.4GHzfrequency, Δδi is thus approximately equal to 0.0041. Withthe given ki, the measured phase difference Δ∠hi can beexpressed as follows:
Δ∠hi = Δ∠hi + Δβ + ΔZi 10
The Figure 4 shows the raw phase (marked as blue dots)and the phase difference between antenna number 1 andantenna number 2 (marked as red cross) and antenna num-ber 2 and antenna number 3 (marked as green circle) of the20th subcarrier in the polar coordinate plot for 1000 consec-utively received packets. From Figure 4, we can see that theraw CSI phase scatters randomly over all feasible anglesbetween 0° and 360°; however, the phase difference concen-trate into a sector between 0° and 15° as well as 340° and355°, which indicates that the measured phase difference data
on each subcarrier between adjacent antennas is stableenough for motion detection.
Figure 5 plots the CSI phase difference in static anddynamic environments. We can see that the phase differ-ence remains stable with no human movement in theenvironment, while become inordinate when there existssome movements.
5.2. Feature Extraction. It is critical to extract appropriatefeatures for a device-free detection system. In this module,we extract some features from CSI phase difference andamplitude, considering to build a real-time, robust, and reli-able device-free detection system; the features we selectedneed to meet two conditions: (1) sensitive to human presenceand (2) resistive to environmental variations. After the datapreprocessing in the previous module, we get the phase dif-ference as an input. In the previous work, various metricssuch as variance, mean, and distribution distance have beenexploited for detection. Previous work [3, 4] only seeks foramplitude-based or combination of amplitude and phase.In this paper, we leverage phase difference-based featuresfor motion detection.
For extracting features for motion detection, we con-struct corresponding covariance matrix H and Φ from the
−2
−1
0
1
2Ph
ase d
iffer
ence
(rad
)
100 200 300 400 5000Packets index
Antenna number 1-antenna number 2Antenna number 1-antenna number 3
(a) Static environment
−6
−4
−2
0
2
4
Phas
e diff
eren
ce (r
ad)
100 200 300 400 5000Packets index
Antenna number 1-antenna number 2Antenna number 1-antenna number 3
(b) Dynamic environment
Figure 5: A sample phase difference of 470 packets in two different situations.
0
0.2
0.4
0.6
0.8
1
1.2
Am
plitu
de fe
atur
e
100 200 300 400 500 6000Feature samples
0.2
0.4
0.6
0.8
1
(a) Amplitude
0
0.5
1
1.5
2
2.5Ph
ase d
iffer
ence
feat
ure
100 200 300 400 500 6000Feature samples
0.5
1
1.5
2
(b) Phase difference
Figure 6: Feature distribution with human-free and human present.
6 Journal of Sensors

normalized CSI amplitude H and the normalized phasedifference Φ, respectively. The covariance matrix can berepresented as follows:
H =
cov H1,H1 ⋯ cov H1,HK
⋮ ⋱ ⋮
cov HK ,H1 ⋯ cov HK ,HK
,
Φ =
cov ϕ1, ϕ1 ⋯ cov ϕ1, ϕK⋮ ⋱ ⋮
cov ϕK , ϕ1 ⋯ cov ϕK , ϕK
,
11
DynamicStatic
0.2 0.4 0.6 0.8 10Alpha 1
0
0.1
0.2
0.3
0.4
0.5
Alp
ha 2
(a)
DynamicStatic
0.5 1 1.5 2 2.50Beta 1
0
0.2
0.4
0.6
0.8
1
Beta
2
(b)
10.5
0 0 0.5 1 1.5 2
DynamicStatic
Alpha 2 Alpha 1
0
0.01
0.02
0.03
Alp
ha 3
(c)
0.40.2
0 00.5
1
DynamicStatic
Alpha 1Alpha 2
00.5
11.5
22.5
Beta
1
(d)
DynamicStatic
Alpha 1
32
Beta 1 10 0
0.51
0
0.5
1
Beta
2
(e)
DynamicStatic
10.5
0 0 12
3
Beta 2 Beta 1
0
0.2
0.4
0.6
Beta
3
(f)
Figure 7: The feature distribution of amplitude and phase difference.
Human absenceHuman presenceSupport vectors
−0.2
0
0.2
0.4
0.6
0.8
1
Beta
2
0.5 1 1.50Beta 1
Figure 8: Preliminary classification result using a SVM.
7Journal of Sensors

where cov Hi,Hj denotes the covariance between Hi andHj, H indicates the normalized version of variable H.Afterwards, we calculate the eigenvalues of both CSIamplitude covariance matrix and phase difference covari-ance matrix, which finally form a six-tuples F = α1, α2,α3, β1, β2, β3 :
α =max eigen H ,
β =max eigen Φ12
For both eigenvalues α and β, with lower eigenvalues,the link is more likely to be static and free of intrusion.In contrast, higher eigenvalues would indicate that somepeople intrude the monitoring area and cause dynamicchanges. Figure 6 plots the amplitude and phase featuredistribution with human-free and human present for580 samples. The first 340 feature samples indicate ahuman-free state, and the last 240 feature samples meanhuman intruded. Apparently, we can see that both ampli-tude and phase difference feature metrics in the case ofhuman intrusion changed significantly compared withthe static cases. However, compared in Figures 6(a) and6(b), we can see that the amplitude features are not sen-sitive than phase difference features in some samplepoints. This also explains that phase difference is morerobust and sensitive to the environment than amplitudebecause it is the sum of individual variance betweentwo antennas.
5.3. Motion Detection. After extracting features from CSIamplitude and phase difference, we need to choose an
appropriate classification method to classify these featuresand determine if anyone broke in. We can classify theextracted features into two categories: nonobjective classand objective class.
To test the validity of the extracted features, Figure 7plots the distribution of amplitude features αi, phase dif-ference features βi, and their combination for 540groups of measurements. Considering the contingencyof measurement, we collect CSI data in different envi-ronments and periods. In Figure 7(a), we can see thatthere is no longer a clear gap for identifying humanmovement when we use amplitude features α1 and α2as input. However, when the phase difference featuresβ1 and β2 are used as input, an obvious hyperplanedivides the feature points into two parts in Figure 7(b).From Figures 7(c) to 7(e), we can see that the effect ofclassification improved as the phase difference featuresadded. Therefore, we choose the phase difference featuresfor human detection.
We apply three kinds of machine-learning classificationalgorithms including the support vector machine (SVM),random forest (RF), and K-nearest neighbor (KNN) fordistinguishing motion detection.
We first conduct a SVM by utilizing a LIBSVM tool[31] on the phase difference features β1 and β2 collected,as shown in Figure 8, a clear gap can be seen to distin-guish the data corresponding to the presence and absenceof intruding human. Figure 8 shows the preliminaryclassification results using a SVM with only a few CSIsamples, and we prove that it is sufficient to provide asatisfied detection performance in the experiments andevaluation part.
RX
TX
7.5 m
5.7 m
(a)
A201
A202 A204 A206
A205
54 mA209
Toilet
A203
TXRX 2 m
(b)
5.7 m
TX
RX
24.6 m
(c)
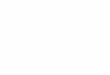
Figure 9: Floor plan of the experimental areas. (a) Meeting room. (b) Corridor. (c) Laboratory.
8 Journal of Sensors

6. Experiments and Evaluation
In this section, we first explicate the prototype implementa-tion of our PhaseMode system and describe the details ofexperimental settings. Then, we analyze the experimentalmethodology. Finally, we present the performance evaluationof PhaseMode in three typical indoor scenarios.
6.1. Implementation. In this section, we conduct ourextensive experimental studies to evaluate the proposedsystem, PhaseMode. We prototype PhaseMode with com-modity WiFi devices and evaluate its performance in atypical office building including a meeting room, corridor,and a laboratory as shown in Figure 9. We employ a Sonylaptop running Ubuntu 14.04 OS equipped with COS Intel5300 NIC and a modified firmware as the receiver. Acommercial TP-LINK TL-WR880N wireless router is setas the transmitter operating in IEEE 802.11n AP modeat 2.4GHz. The three omnidirectional receiver antennasare placed at a distance of 6.25 cm, which is half of thewavelength in the 2.4GHz band. We send the ping packetsfrom the transmitter to the receiver antennas and extractthe phase difference information from the neighbor antennasfor motion detection.
6.2. Experimental Methodology. We collect data from twocategories: (1) static data (there is no person present in themonitoring area) and (2) dynamic data (one or more personswalking in the monitoring area).
We do our experiments in the corridor, laboratory, andmeeting room, respectively, as shown in Figure 10, and we listsome parameters of the three experimental areas in Table 1.To collect dynamic data, we let one to three experimentersrandomly walking around the interesting area at normalspeed. We set the transmitter and receiver antenna at theheight of 1.4m in the corridor, laboratory, and meeting roomin order to avoid the signal being blocked by the indoorfacilities. Particularly, we consider LOS propagation withdifferent distances ranging from 2 meters to 6 meters.For intrusion target detection, we first apply the well-known support vector machine (SVM) with the features,
(a) Corridor (b) Laboratory
(c) Meeting room
Figure 10: Experimental areas.
Table 1: Parameters of experimentation.
Parameters Corridor Laboratory Meeting room
Size 54m× 2.0m 24.6m× 5.7m 7.5m× 5.7mPerson present 1 7 2
9Journal of Sensors

that is, β1, β2, β3, to obtain a threshold line, based on aportion of measurements.
6.3. Performance Evaluation
6.3.1. Evaluation Metrics. We mainly use the followingmetrics for evaluating the performance of our system.
(i) True positive rate (TPR): the probability that amoving human presence is correctly classified.
(ii) True negative rate (TNR): the probability that nohuman presence is correctly identified.
(iii) Detection accuracy: the probability of identifyingthe environmental changes in different scenarios.
6.3.2. Overall Performance. Firstly, we conduct our experi-ments in different environments to examine the overallperformance of our system. Figure 11 shows the performanceof moving detection using different features with three kindsof the classification algorithm. From Figure 11, we can seethat the TN rate of both phase difference feature andamplitude and phase difference feature is higher thanamplitude-based and the same as the TP rate. The detectionaccuracy results are shown in Table 2.
6.3.3. Impact of the Number of Features. We inspect theimpact of the number of features on detection accuracyin different scenarios. From Figure 12, we can see thatthe detection accuracy undergoes some loss but stillkeeps at 99.62% with the number of features increase
and more higher than the PADS method, which exploit bothamplitude and phase information. The phase difference-based features we extracted are based on the correlationbetween neighbor subcarriers, which fluctuate with thechange of the environment. The first several features repre-sent the correlation to a great extent; applying more featureswill result to the reduction of detection accuracy. Asillustrated in Figure 12, we can use two features to achieve ahigh motion detection accuracy.
6.3.4. Impacts of Sliding Window Size. Figure 13 shows thedetection accuracy for different sliding window sizes. Wecompare our system with FIMD and PADS. As illustratedin Figure 13, for all three schemes, the larger the size ofthe sliding window, the higher the detection accuracy inthe overall trend. With a larger window size, we get morefeature samples in the time dimension that might alleviatethe influence of temporal variance. However, when thesize reaches some threshold, the rate might keep stable.Compared with PADS, our system achieves a slightly betterdetection performance.
Phase diffAmplitude and phase diffAmplitude
SVMRFKNN
80
85
90
95
100D
etec
tion
accu
racy
(%)
(a) TN rate with no human
SVMRFKNN
60
70
80
90
100
Det
ectio
n ac
cura
cy (%
)
Amplitude and phase diff Phase diffAmplitude
(b) TP rate with human walking
Figure 11: Detection accuracy with different features.
Table 2: Detection accuracy in different scenarios with threeclassification algorithms.
Algorithm Amplitude Amplitude and phase diff Phase diff
SVM 87.57% 96.96% 98.86%
RF 88.12% 95.23% 99.81%
KNN 87.57% 98.86% 99.62%
Phase modePADS
3 4 5 62Number of features
98
98.5
99
99.5
100
Det
ectio
n ac
cura
cy (%
)
Figure 12: Impacts of the number of features on detection accuracy.
10 Journal of Sensors

7. Conclusion
In this paper, we design and implement a new passive device-free scheme to detect indoor human intrusion leveragingwireless physical layer information CSI in commercial NICs.We implement the system on COTS WiFi devices andevaluate it in real different scenarios including a laboratory,corridor, and meeting room. The experimental resultsdemonstrate that our system can improve the sensitivity aswell as robustness compared with the previous schemes,and the average detection accuracy can be up to 99.4%.
Conflicts of Interest
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
This work is supported by the National Key Researchand Development Program of China under Grant no.2017YFC0804401.
References
[1] M. Youssef, M. Mah, and A. Agrawala, “Challenges: device-free passive localization for wireless environments,” inProceedings of the 13th Annual ACM International Conferenceon Mobile Computing and Networking, pp. 222–229, Montréal,QC, Canada, 2007.
[2] M. Youssef, “CoSDEO 2016 keynote: a decade later —challenges: device-free passive localization for wirelessenvironments,” in 2016 IEEE International Conference on Per-vasive Computing and Communication Workshops (PerComWorkshops), pp. 1-2, Sydney, NSW, Australia, 2016.
[3] K. Qian, C. Wu, Z. Yang, Y. Liu, and Z. Zhou, “PADS: passivedetection of moving targets with dynamic speed using PHYlayer information,” in 2014 20th IEEE International Confer-ence on Parallel and Distributed Systems (ICPADS), pp. 1–8,Hsinchu, Taiwan, 2014.
[4] C. Wu, Z. Yang, Z. Zhou, X. Liu, Y. Liu, and J. Cao, “Non-invasive detection of moving and stationary human with
WiFi,” IEEE Journal on Selected Areas in Communications,vol. 33, no. 11, pp. 2329–2342, 2015.
[5] H. Zhu, F. Xiao, L. Sun, R. Wang, and P. Yang, “R-TTWD:robust device-free through-the-wall detection of movinghuman withWiFi,” IEEE Journal on Selected Areas in Commu-nications, vol. 35, no. 5, pp. 1090–1103, 2017.
[6] J. Xiao, K. Wu, Y. Yi, L. Wang, and L. M. Ni, “FIMD: fine-grained device-free motion detection,” in 2012 IEEE 18thInternational Conference on Parallel and Distributed Systems,pp. 229–235, Singapore, Singapore, 2012.
[7] H. Abdelnasser, M. Youssef, and K. A. Harras, “WiGest: Aubiquitous WiFi-based gesture recognition system,” in 2015IEEE Conference on Computer Communications (INFOCOM),pp. 1472–1480, Kowloon, Hong Kong, 2015.
[8] J. Xiao, K. Wu, Y. Yi, L. Wang, and L. M. Ni, “Pilot: passivedevice-free indoor localization using channel state informa-tion,” in 2013 IEEE 33rd International Conference on Distrib-uted Computing Systems, pp. 236–245, Philadelphia, PA,USA, 2013.
[9] L. Zhang, E. Ding, Z. Zhao, Y. Hu, X. Wang, and K. Zhang,“A novel fingerprinting using channel state informationwith MIMO–OFDM,” Cluster Computing, vol. 20, no. 4,pp. 3299–3312, 2017.
[10] Y. Wang, J. Liu, Y. Chen, M. Gruteser, J. Yang, and H. Liu, “E-eyes: device-free location-oriented activity identification usingfine-grained WiFi signatures,” in Proceedings of the 20thAnnual International Conference on Mobile Computing andNetworking -MobiCom ‘14, pp. 617–628,Maui, HI, USA, 2014.
[11] K. Ali, A. X. Liu, W.Wang, andM. Shahzad, “Keystroke recog-nition using WiFi signals,” in Proceedings of the 21st AnnualInternational Conference on Mobile Computing and Network-ing - MobiCom ‘15, pp. 90–102, Paris, France, 2015.
[12] W. Wang, A. X. Liu, M. Shahzad, K. Ling, and S. Lu, “Device-free human activity recognition using commercial WiFidevices,” IEEE Journal on Selected Areas in Communications,vol. 35, no. 5, pp. 1118–1131, 2017.
[13] Y. Wang, K. Wu, and L. M. Ni, “WiFall: device-free falldetection by wireless networks,” IEEE Transactions on MobileComputing, vol. 16, no. 2, pp. 581–594, 2017.
[14] S. Zhong, Y. Huang, R. Ruby, L. Wang, Y.-X. Qiu, and K. Wu,“Wi-fire: device-free fire detection using WiFi networks,” in2017 IEEE International Conference on Communications(ICC), pp. 1–6, Paris, France, 2017.
[15] D. Halperin, W. Hu, A. Sheth, and D. Wetherall, “802.11 withmultiple antennas for dummies,” ACM SIGCOMM ComputerCommunication Review, vol. 40, no. 1, pp. 19–25, 2010.
[16] Y. Xie, Z. Li, and M. Li, “Precise power delay profilingwith commodity WiFi,” in Proceedings of the 21st AnnualInternational Conference on Mobile Computing and Net-working - MobiCom ‘15, pp. 53–64, Paris, France, 2015.
[17] X. Wang, C. Yang, and S. Mao, “TensorBeat: tensor decompo-sition for monitoring multi-person breathing beats withcommodity WiFi,” 2017, http://arxiv.org/abs/1702.02046.
[18] M. Moussa and M. Youssef, “Smart cevices for smartenvironments: device-free passive detection in real environ-ments,” in 2009 IEEE International Conference on PervasiveComputing and Communications, pp. 1–6, Galveston, TX,USA, 2009.
[19] J. Wilson and N. Patwari, “Radio tomographic imaging withwireless networks,” IEEE Transactions on Mobile Computing,vol. 9, no. 5, pp. 621–632, 2010.
FIMD
Phase modePADS
75
80
85
90
95
100
Det
ectio
n ac
cura
cy (%
)
10 20 30 40 500The size of sliding window
Figure 13: Detection accuracy with different window sizes.
11Journal of Sensors

[20] J. Wilson and N. Patwari, “See-through walls: motion trackingusing variance-based radio tomography networks,” IEEETransactions on Mobile Computing, vol. 10, no. 5, pp. 612–621, 2011.
[21] A. E. Kosba, A. Saeed, and M. Youssef, “RASID: a robustWLAN device-free passive motion detection system,” in 2012IEEE International Conference on Pervasive Computing andCommunications, pp. 180–189, Lugano, Switzerland, 2012.
[22] J. Wang, Q. Gao, Y. Yu, P. Cheng, L. Wu, and H. Wang,“Robust device-free wireless localization based on differentialRSS measurements,” IEEE Transactions on Industrial Electron-ics, vol. 60, no. 12, pp. 5943–5952, 2013.
[23] A. Bhartia, Y.-C. Chen, S. Rallapalli, and L. Qiu, “Harnessingfrequency diversity in Wi-Fi networks,” in Proceedings of the17th Annual International Conference on Mobile Computingand Networking - MobiCom ‘11, pp. 253–264, Las Vegas, NV,USA, 2011.
[24] Z. Zhou, Z. Yang, C. Wu, L. Shangguan, and Y. Liu, “Towardsomnidirectional passive human detection,” in 2013 Proceed-ings IEEE INFOCOM, pp. 3057–3065, Turin, Italy, 2013.
[25] N. Pang, D. Zhu, K. Xue, W. Rong, Y. Liu, and C. Ou, “Analyz-ing customer’s product preference using wireless signals,” inKnowledge Science, Engineering and Management. KSEM2017, pp. 139–148, Springer, Cham, 2017.
[26] L. Davies and U. Gather, “The identification of multipleoutliers,” Journal of the American Statistical Association,vol. 88, no. 423, pp. 782–792, 1993.
[27] C.Wu, Z. Yang, Z. Zhou, K. Qian, Y. Liu, andM. Liu, “PhaseU:real-time LOS identification with WiFi,” in 2015 IEEEConference on Computer Communications (INFOCOM),pp. 2038–2046, Kowloon, Hong Kong, 2015.
[28] M. Speth, S. A. Fechtel, G. Fock, and H. Meyr, “Optimumreceiver design for wireless broad-band systems using OFDM.I,” IEEE Transactions on Communications, vol. 47, no. 11,pp. 1668–1677, 1999.
[29] S. Sen, B. Radunovic, R. R. Choudhury, and T.Minka, “You arefacing the Mona Lisa: spot localization using PHY layer infor-mation,” in Proceedings of the 10th International Conferenceon Mobile Systems, Applications, and Services - MobiSys ‘12,pp. 183–196, Low Wood Bay, Lake District, UK, 2012.
[30] J. Gjengset, J. Xiong, G. McPhillips, and K. Jamieson, “Phaser:enabling phased array signal processing on commodity WiFiaccess points,” in Proceedings of the 20th Annual InternationalConference on Mobile Computing and Networking - MobiCom‘14, pp. 153–164, Maui, HI, USA, 2014.
[31] C.-C. Chang and C.-J. Lin, “LIBSVM: a library for supportvector machines,” ACM Transactions on Intelligent Systemsand Technology, vol. 2, no. 3, pp. 1–27, 2011.
12 Journal of Sensors

International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com