Embed Size (px)
Citation preview
A Review of Rotational Hardening Rules Suitable forModeling of Cohesive Soils
Andres Nieto Leal1
and
Victor N. Kaliakin2
Department of Civil and Environmental EngineeringUniversity of Delaware
Newark, Delaware, U.S.A.
October, 2014
1Department of Civil and Environmental Engineering, University of Delaware, Newark, DE19716, U.S.A. and Department of Civil Engineering, Universidad Militar Nueva Granada, Cajica,Colombia.
2Department of Civil and Environmental Engineering, University of Delaware, Newark, DE19716, U.S.A.

Contents
1 Introductory Remarks 2
2 Pertinent Experimental Results Related to Evolution of Anisotropy 32.1 Structure and Fabric of Fine-Grained Soils . . . . . . . . . . . . . . . . . . . 32.2 Anisotropy in Cohesive Soils . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Inherent and Stress-Induced Anisotropy . . . . . . . . . . . . . . . . 42.3 Discussion of Experimental Results . . . . . . . . . . . . . . . . . . . . . . . 5
3 Previously Proposed Rotational Hardening Rules 83.1 Dafalias, 1986 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Banerjee and Yousif, 1986 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3 Anandarajah and Dafalias, 1986 . . . . . . . . . . . . . . . . . . . . . . . . . 113.4 Liang and Ma, 1992 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.5 Whittle and co-Workers, 1994 and 1999 . . . . . . . . . . . . . . . . . . . . . 153.6 Wheeler et al., 2003 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.7 Ling et al., 2002 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.8 Dafalias et al., 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.9 Jiang et al., 2012 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.10 Dafalias and Taiebat, 2013 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Towards an Improved Rotational Hardening Rule for Generalized Bound-ing Surface Model 224.1 RH Law for the Plastic Potential . . . . . . . . . . . . . . . . . . . . . . . . 224.2 RH Rule for the Bounding Surface . . . . . . . . . . . . . . . . . . . . . . . 254.3 Critical Anisotropic State . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 Non-associative flow rule . . . . . . . . . . . . . . . . . . . . . . . . . 274.4 RH Rule for Associative Flow Rule . . . . . . . . . . . . . . . . . . . . . . . 284.5 A Special Loading Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.6 Relations Between Stress Invariants in Multiaxial and triaxial Space and Lode
Angle Dependency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.7 Excessive Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.8 Determination of Suitable Values for Model Parameters . . . . . . . . . . . . 32
1

Chapter 1
Introductory Remarks
The quantification of clay particle reorientation (microfabric evolution) during anisotropic orisotropic consolidation followed by shear loading is an important component of any mathe-matical (macroscopic) formulation developed to simulate the behavior of cohesive soils. Thisquantification is typically realized through a suitable rotational hardening (RH) rule thatdefines the rotation of the yield or bounding surface and the plastic potential surface duringnon-hydrostatic loading.
This report first reviews the results of pertinent experimental programs that were un-dertaken to gain further insight into the microfabric evolution in cohesive soils subjectedto shear. Previously proposed RH rules are next critically reviewed. Finally, a RH rule isproposed that incorporates some of the more desirable aspects of previous RH rules, andsupplements these with features that make this RH rule particularly well-suited for use inconjunction with the generalized bounding surface model (GBSM) for cohesive soils [42].
In the subsequent development tensorial quantities are presented in indicial form withthe indices obeying the summation convention over repeated indices. Compressive stressesand strains are taken as positive, and infinitesimal strains are assumed.
2

Chapter 2
Pertinent Experimental ResultsRelated to Evolution of Anisotropy
This chapter summarizes the findings of various experimental studies that have investigatedthe evolution of anisotropy in cohesive soils. Before discussing these findings, it is timely tobriefly review some background information.
2.1 Structure and Fabric of Fine-Grained Soils
The geometric arrangement of particles, particle groups and pore spaces (voids) in a soil isreferred to as fabric. Referring to the fabric scale concept, Mitchell and Soga [49] furtherdivide soil fabric into the microfabric, minifabric, and macrofabric. The microfabric includesthe regular aggregation of particles (i.e., particle clusters) and the very small pores betweenthem called micropores. The minifabric contains the aggregation of the microfabric and thepores between them called minipores. Finally, the macrofabric is the largest scale, whichincludes cracks, fissures, root holes, etc., thus, characterizing the in-situ conditions.
In soil mechanics, the term structure, or more accurately microstructure, is used to de-scribe the fabric along with the interparticle forces present in a soil. Since the microstructureacquired by a clay deposit at the time of formation may have a profound influence on its sub-sequent engineering properties, an understanding of factors influencing the microstructureis of considerable importance. Compared to the quantification of its macroscopic response,the study of a soil’s microstructure is significantly more difficult. Furthermore, since inter-particle forces are very difficult, if not impossible to measure, it follows that the fabric, andnot the microstructure is most amenable to study and quantification.
In cohesionless soils (i.e., gravels, sands and silts), the surface activity of the individ-ual particles is very small. The fabric and microstructure of such soils is thus essentiallythe same. However, in fine-grained cohesive soils the interparticle forces are relatively large.Consequently, the microstructure of such soils consists of both these forces and the soil fabric.
The interaction of individual clay particles through their adsorbed water layers is closely
3

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
associated with the microstructure of the soil, and has a profound influence on its behaviorand engineering properties. Research on clay microstructure suggests that the greatest singlefactor influencing the final microfabric of a clay is the electrochemical environment existingat the time of sedimentation [38].
2.2 Anisotropy in Cohesive Soils
Experimental evidence indicates that most of the mechanical properties of soils are asso-ciated with certain preferred directions in space [12; 56; 62]. Mathematically, natural andremolded soils are thus classified as being anisotropic.
Anisotropy of cohesive soils is attributed to the preferred orientation of particles andthe development of residual stresses. Preferred microstructural orientations cause both elas-tic and inelastic anisotropy. For small strains, the consideration of elastic anisotropy isimportant, especially in relation to elastic wave-propagation problems. For larger strains,inelasticity is predominant and elastic anisotropy can be neglected [19].
2.2.1 Inherent and Stress-Induced Anisotropy
Anisotropy of soils has traditionally been classified into two components [12]: inherent andstress-induced. Inherent anisotropy is attributed to preferred particle arrangement and in-terparticle forces developed during sedimentation. It is a physical characteristic attributedto the material microstructure that is entirely independent of applied stresses.
For granular soils, Oda and Nakayama [52] listed the following as sources of inherentanisotropy:
1. Anisotropic distribution of contact normals.
2. The preferred orientation of void spaces.
3. The preferred orientation of non-spherical particles.
For cohesive soils the sources of inherent anisotropy are not as clearly defined, for theytypically consist of particles and particle groups with relatively little regularity in the mi-crofabric. Nonetheless, some insight into this topic has been realized. Tavenas and Leroueil[62] and Graham et al. [29] showed that geological processes and stresses prevalent duringthe formation of clay deposits are responsible for the development of inherent anisotropy.
Stress-induced anisotropy, on the other hand, is a physical characteristic resulting al-most exclusively from the deformation associated with changes in applied stress. In gran-ular geomaterials the particles tend to orient perpendicular to the direction of the appliedload [63; 53; 51]. This stress-induced anisotropic distribution is believed to be one of thefundamental features that needs to be incorporated in mathematically modeling geomateri-als [30]. This orientation is likewise prevalent in cohesive soils [48], where the particles are
4 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
platey.
In general, it is difficult to separately measure inherent and induced anisotropy. In fact, inengineering practice it is not important to distinguish the consequences of the two anisotropicmechanisms. Therefore, inherent and induced anisotropy are usually evaluated together interms of their combined effect, that is sometimes referred to as combined anisotropy.
2.3 Discussion of Experimental Results
Different experimental techniques have been used to evaluate the microfabric evolution incohesive soils during loading. Examples include: X-Ray Diffraction [48; 59], Electrical Con-ductivity [44] and Optical or Scanning Electron Microscopy [24; 8; 37; 25; 32], and AtomicForce Microscopy [59].
In cohesive soils, the initial configuration of the microfabric is obtained from the con-solidation process and defines the inherent anisotropy. For instance, after one-dimensional(i.e., K0) or anisotropic consolidation, the microfabric is highly anisotropic. Accordingly,most clay particles are oriented towards a direction that is perpendicular to the directionof loading. This, in turn, results in microfabric that is more likely to be dispersed. Bycontrast, isotropic consolidation produces a more or less isotropic particle orientation thattends to result in a flocculated microfabric. However, if a sample is first anisotropicallyconsolidated and then isotropically consolidated, the microfabric anisotropy due to the firstconsolidation stage decreases but it remains mostly anisotropic, even if the isotropic stressis quite high [44; 33; 26]. Any natural cohesive soil that has been consolidated in-situ thusmaintains some of its anisotropic microfabric, even after isotropic consolidation.
In addition, if the soil is subsequently subjected to any anisotropic loading path with vari-able η = q/p′, the microfabric anisotropy will, in general, continue increasing independentlyof the overconsolidation ratio until the critical state is reached [8; 37; 32; 34; 33; 31; 13].Furthermore, it has been shown that no markable reorientation or rotation of clay particlestakes place at small strain levels. The rotation mechanism initiates beyond some accumula-tion of plastic strain and is attributed to the evolution of the deviatoric stress [32]. Thus,isotropic stress states are unable to activate the rotation mechanism towards some preferreddirection. Instead, it is the deviatoric part of the effective stress tensor (sij = σ′ij − 1
3σ′kkδij)
that activates the rotational mechanism instead of the isotropic (spherical) part (σ′kk). Thedeviatoric part causes induced anisotropy, which is developed once the rotation mechanicshave been activated.
Hicher et al. [36] reported that the influence of initial anisotropy is erased by subsequentlarge plastic deformations. They showed that the maximum shear strength, and hence thefailure criterion, appear to be independent of the inherent anisotropy.
The microfabric evolution is more remarkable during drained shear loading than underundrained conditions. This is because under drained conditions the slow rate of loading
5 A. Nieto-Leal and V. N. Kaliakin
Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
affords more time for the reorientation of the clay particles towards some preferential orien-tation, usually perpendicular to the direction of loading. By contrast, in the case of shearbands, due to the large displacements present inside this zone, clay particles become orientedtowards the direction parallel to the shear band [35; 36; 25].
Even though the response of cohesive soils under different loading conditions dependson its microfabric, the implementation of constitutive models has typically been realizedbased on the macroscopic point of view that treats the soil as a continuum. However, in anattempt to simulate the behavior of cohesive soils as discrete particles, Chai et al. [14] andAnandarajah and his co-workers [1; 2; 3; 67] used the Discrete Element Method (DEM) tosimulate the behavior of cohesive soils under one-dimensional and isotropic consolidation.They confirmed earlier experimental findings that following anisotropic consolidation (i.e.,1-D consolidation), the microfabric of cohesive soils becomes anisotropic. In addition, thehigher the applied consolidation stress, the more anisotropic will be the sample.
Delage and Lefebre [24] noted that the minipores compress first and the minifabric getsreoriented, leading to an anisotropic microfabric during one-dimensional consolidation. How-ever, at high stress levels the micropores compress and the microfabric becomes anisotropic.By contrast, during isotropic consolidation the minifabric and microfabric become isotropic.However, it has been observed that if isotropic consolidation is applied to an initiallyanisotropically consolidated sample, the microfabric will not become completely isotropic.Instead, some particles will remain in preferential orientations [48; 5; 6], but the sample willrespond more like an isotropically consolidated sample. Accordingly, Anandarajah [2] foundthat the particle orientation at the cluster level controls the overall macroscopic behavior.Consequently, it is the minifabric that governs the behavior of cohesive soils.
Hattab [31] found that the preferential orientation after undrained triaxial loading isdominated by groups of particles (i.e., clusters) and not by the orientation of individual par-ticles. Pusch [57] also observed that the shear mechanism in unconfined compression testsconsists of the movement of particle aggregates or clusters as units connected by “links.”Thus, at high stress levels the links are broken due to large shear deformations and theparticle aggregates continue to reorient towards some failure plane.
Chang and his coworkers assumed that clay particles attract each other due to surfaceforces to form particle clusters. As a result, clayey soil is assumed to be an assembly ofclusters [15; 71; 70; 72; 68]. Due to the fact that clay particles are strongly attracted toeach other, a clay cluster itself is much stiffer than an agglomeration of clusters. As a result,upon application of external forces, the minifabric will govern the soil’s behavior. Thus,to simulate the macroscopic behavior of cohesive soils based on discrete particles, the soilis considered as a collection of clusters that interact with each other largely through me-chanical forces rather than mechanical-physico-chemical forces1. Finally, at critical state,
1Clay particles are usually subjected to mechanical forces at contact points and physico-chemical forcesthat include double-layer repulsive force (electrostatic origin) and van der Waals attractive force (electro-magnetic origin).
6 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
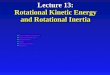
Hattab and Fleureau [33] and Hattab [31] showed that the orientation of clay particles orparticle clusters is segregated into two different zones: one active zone where particles areoriented towards a specific orientation around 40o, and another “steady” zone where parti-cles are oriented towards the horizontal direction (Fig. 2.1). In addition, the orientation ofthe particles seemed to be independent of the consolidation stress and overconsolidation ratio.
Clayey matrix
Steady zone
Figure 2.1: Orientation of particles and particle clusters at critical state [31].
Based on the previous experimental findings, it is evident that the evolution of the mini-fabric due to non-hydrostatic loading must be accounted for mathematically in order toproperly quantify stress-induced anisotropy in cohesive soils. In elastoplastic and elasto-viscoplastic macroscopic constitutive relations this evolution is accounted for through therotation of the yield/bounding surface and, if applicable, the plastic potential surface via aspecific rotational hardening (RH) rule. In the next section several different RH rules thathave been used in the past are discussed.
7 A. Nieto-Leal and V. N. Kaliakin

Chapter 3
Previously Proposed RotationalHardening Rules
Stress-induced anisotropy is mathematically accounted for largely through rotational hard-ening of the yield or bounding surface and, if applicable, the plastic potential surface [9].Consequently, the material state is not determined solely by the state of effective stress, butalso requires a measure of stress-induced anisotropy. The RH rule defines the evolution ofthe aforementioned rotation of these surfaces during non-hydrostatic loading.
In the subsequent discussion, the stress ratio in axisymmetric triaxial stress space isdenoted by η = q/p′. In the same space, the variable α quantifies the rotation of the afore-mentioned surfaces, and M denotes the slope of the critical state line. The critical stateparameters λ and κ denote the negative of the slopes of the isotropic consolidation andswell/recompression lines, respectively, in a plot of void ratio (e) versus the natural loga-rithm of p′. Finally, a superposed dot indicates a material time derivative or rate.
There are some well-known requirements that should be satisfied by a RH rule, namely:
• During constant η loading the RH parameters, denoted by α and β, should convergeto an equilibrium value. For example, for one-dimensional consolidation loading (i.e.,η = ηK0), the correct K0 value should be predicted.
• At critical state, defined by η = M , no further anisotropy should develop; i.e., α = 0.Thus, as η →M , α→ 0.
• Excessive rotation should not occur; i.e., in general, |α| < M . Accordingly, loading atvery high stress ratios (η > M) should not produce excessive rotation. This require-ment is also important for formulations for which the yield/bounding surface has thefollowing form: F = Q = (q − pα)2 − (M2 − α2)p′(p′0 − p′) = 0. In such cases, realvalues of q will only be obtained if |α| < M .
• The rate of rotation should be slower if a specific loading history is initiated from ananisotropic stress state (e.g., under K0 conditions) rather than from an isotropic one.
8

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
• Any evolution of anisotropy should be affected by the deviatoric part of the effectivestress tensor and not by the volumetric part.
• The pace of the evolution of anisotropy should be proportional to the level of strain.Thus, the smaller the strain level, the slower should be the rotation.
One of the main differences between the various RH rules is whether [64; 55] or not[20; 10; 66; 47; 21; 40] the deviatoric plastic strain increment (εpq) is included. It is notablethat in most of the cases the RH law involves two model parameters; one controlling thepace of rotation of the yield/bounding surface (and plastic portential surface in models withnon-associative flow rule.) and a second one defining the “target” or equilibrium value of theRH law for constant stress ratio η loading. This target value ensures a reasonable predictedvalue of K0 under constant stress ratio η = ηK0 loading.
3.1 Rule Proposed by Dafalias [20]
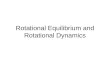
Dafalias [20] proposed the first anisotropic form of the Modified Cam Clay model [58]. Theassociated yield surface is shown schematically in Figure 3.1. Analytically it is given by
f = (p′)2 − p′p′0 +
1
M2
[(q − p′α)
2+ α2p′ (p′0 − p′)
]= 0
Figure 3.1: Schematic illustration of anisotropic Cam Clay yield surface in p′ - q space (afterDafalias [20]).
9 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Associated with this model was the following RH rule:
α = 〈L〉 α = 〈L〉 1 + einλ− κ
∣∣∣∣ ∂f∂p′∣∣∣∣ cp′0 (q − xp′α) (3.1)
After minor manipulation, equation (3.1) can also be written as
α = 〈L〉 α = 〈L〉 1 + einλ− κ
∣∣∣∣ ∂f∂p′∣∣∣∣ c( p′p′0
)(η/x− α) (3.2)
where L is the scalar loading index; loading, neutral loading, and unloading occur whenL > 0, L = 0 and L < 0, respectively. The symbols <> denotes Macaulay brackets, whichimply that < L >= L if L > 0 and < L >= 0 if L ≤ 0. The term 〈L〉 ensures that RH onlytakes place during plastic loading.
In equations (3.1) and (3.2), c and x are model parameters. The former controls thepace of evolution of α, while the latter ensures that no evolution of α occurs during constantη loading; i.e., α → η/x gives α → 0. The term involving the initial void ratio and theparameters λ and κ is included for similarity with the isotropic hardening rule.
The term |∂f/∂p| makes α proportional to the volumetric plastic strain increment |εpv|.In addition, this term arrests the evolution of RH at the critical state, where ∂f/∂p = 0.Finally, the ratio p′/p′0 diminishes the rate of rotation with increasing overconsolidation ratio(OCR).
3.2 Rule Proposed by Banerjee and Yousif [10]
Banerjee and Yousif [10] proposed one of simplest RH rules for use in conjunction with ananisotropic incremental plasticity model for soils. In order to characterize a soil’s anisotropy,they introduced a new tensor soij that is defined with respect to the apex of the yield surfaceaccording to
soij = σoij −1
3δijσ
okk
where σoij denotes the effective stress tensor associated with the aforementioned apex suchthat p′0 = σokk/3 (Figure 3.2).
The associated RH rule is given by
soij =
(1 + e0λ− κ
)sij ε
pkk
where e0 is the initial void ratio, sij is the deviatoric stress tensor, and εpkk denotes an incre-ment of plastic volumetric strain.
Although simple in form, the above RH rule is proportional to sij. Consequently, soijcontinues to increase with shearing, even as the critical state failure condition is approached.
10 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Figure 3.2: Schematic illustration of anisotropic Cam Clay yield surface in p′ - q space (afterBanerjee and Yousif [10]).
This is, however, counter to experimental observations. In addition, the effect of the degreeof overconsolidation is not accounted for in the RH rule.
3.3 Rule Proposed by Anandarajah and Dafalias [4]
Anandarajah and Dafalias [4] developed the first detailed anisotropic bounding surface modelfor cohesive soils. The model employed an associative flow rule. The evolution of the stress-induced anisotropy was assumed to depend on both the deviatoric and volumetric plasticstrains. The RH rule had the following general form:
δaij = λ∗(σ′ij, δ
aij
) (epij)a
where λ∗ is a rotational hardening function that depends on the state variables, and(epij)a
= εpij −1
3
(εppqδ
apq
)δaij
is the component of the rate of plastic strain orthogonal to δaij. For δaij 6= 0,(epij)a
has botha deviatoric and a volumetric component.
In light of the previous discussion, Anandarajah and Dafalias [4] proposed the followingmore specific RH rule:
δaij = λ∗ 〈L〉φij (3.3)
11 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
where L is again the scalar loading index and the symbols <> denotes Macaulay brackets.The tensor φij, which gives the direction to δaij, is defined as follows:
φij = Lij −1
3
(Lpqδ
apq
)δaij
where Lij = ∂F/∂σ′ij, with F = 0 being an explicit analytical expression for the boundingsurface, and σ′ij is the effective stress tensor associated with the so-called “image point”located on the bounding surface.
The function λ∗ controls the rate of rotation of the bounding surface. Anandarajah andDafalias [4] assumed the following form for this function:
λ∗ = C1γ b−n0 exp [−C2(1 + ρ)δaJ ] (3.4)
where C1, C2 and n0 are model parameters. The function b ≥ 1 is associated with the radialmapping rule; a value for b can be computed in closed form from an explicit form of thebounding surface (i.e., F = 0).
Figure 3.3: Schematic illustration of bounding surface and geometrical interpretation ofstress variables (after Anandarajah and Dafalias [4]).
The function γ is defined as
γ =
⟨0.9− J
|I|N
⟩(3.5)
12 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
where I = σ′kk, J =√
12sijsij, sij = σ′ij− 1
3δijσ
′kk is the deviatoric stress tensor, and N = N(θ)
is the slope of the critical state line in (Ia, Ja, αa) stress invariant space (Figure 3.3).
The quantity δaJ is the second deviatoric invariant of δaij, which is an equivalent scalarmeasure of the intensity of anisotropy [4]. It is defined by
δaJ =(δsaij δ
saij
) 12 =
[1
2
(δaij −
1
3δakkδij
)(δaij −
1
3δakkδij
)] 12
=1√2
[3− 1
3(δakk)
2
] 12
where δsaij = δaij− 13δakkδij and it is recalled that δaijδ
aij = 3. The unit normal along the direction
of δsaij is
nsaij =δsaij(
δsapq δsapq
) 12
=δsaij√2δaJ
implying that δsaij =√
2δaJnsaij .
.
Remark: δaJ is an equivalent measure of anisotropy; under isotropic conditions, δaij ≡ δij,implying that δsaij = 0, and thus that δaJ = 0. J
.
The quantity ρ (−1 < ρ < 1) entering equation (3.4) accounts for the direction ofanisotropy in relation to the current loading direction. It is defined by
ρ = nsaij nsij
where nsij is the deviatoric component of the unit normal nij = Lij/(LpqLpq)12 at the “image”
point, defined by
nsij = nij −1
3δijnkk
The geometric interpretation of nij and nsij is shown in Figure 3.4. The inclusion of ρ inthe RH rule allows for accurate modeling of the evolution of anisotropy, especially when theloading history includes stress reversals [4].
Assessing Anadarajah and Dafalias’ RH rule, it is apparent that the ratio of the evolutionof the anisotropy is dependent on the current level of anisotropy through the inclusion of δaJin the exponential term in equation (3.4). The quantity δaJ is a scalar measure of the extentof the current rotation of the bounding surface with respect to the I − axis (Figure 3.3).The evolution of δaij will be slowed as the anisotropy, and thus δaJ , increases. The model pa-rameter C2 controls the variation of the exponential term. Since b ≥ 1, the model parametern0 controls the value of λ∗ for stress states within the bounding surface (where b > 1); i.e.,
13 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Figure 3.4: Geometrical interpretation of variables appearing in definition of ρ (after Anan-darajah and Dafalias [4]).
for OCR > 1.0.
Through γ, the evolution of anisotropy is prevented for values of the normalized stressratio J/(|I|N) greater than 0.90. Anandarajah and Dafalias [4] found that this value to benecessary in order to prevent excessive rotation of the bounding surface as the failure stateis approached with a value of λ∗ that “has not yet become sufficiently small.”
3.4 Rule Proposed by Liang and Ma [46]
In their anisotropic bounding surface model, Liang and Ma [46] denoted the anisotropic ten-sor by αij. They incorrectly referred to this tensor as the “fabric tensor,” which is somewhatmisleading since this quantity that strictly speaking applies only to granular soils. The mi-crofabric of such materials consists of individual particles, rather than the particle clustersthat often comprise the microfabric of cohesive soils.
Based on the assumption that the principal axes of αij are coaxial with the principal axesof the deviatoric strain rate eij and influenced by the earlier anisotropic bounding surfacemodel of Anandarajah and Dafalias [4], Liang and Ma [46] assumed the following RH rule:
αij = F ∗epij (3.6)
where F ∗ is a scalar-valued function, and
14 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
epij = εpij −1
3
(εppqαpq
)αij = 〈L〉
[Lij −
(1
3Lpqαpq
)αij
]is the plastic deviatoric strain rate. The quantity L is again the scalar loading index, andLij = ∂F/∂σij.
The function F ∗ purports to account for the following two different phenomena: 1) Theclay minifabric tends to reorient itself in a direction perpendicular to the major principalstress direction, with the rate of reorientation decreasing as the stress state approaches thecritical state; and 2) The clay minifabric is continuously destroyed (and thus less oriented)under stress paths involving a rotation of the principal stress directions. To account for theabove two different phenomena, Liang and Ma [46] proposed the following expression for F ∗:
F ∗ = A1
∥∥∥∥∂F∂I1∥∥∥∥ [exp (−A2βI2α)− A3 exp
(A4B
β
)](3.7)
where A1, A2, A3 and A4 are model parameters, and β is a parameter associated with theradial mapping rule that is computed from an explicit form of the bounding surface.
The quantity
I2α =
(1
2αdijα
dij
) 12
is the second invariant of the deviatoric part of αij, with
αdij = αij −1
3αkkδij
The quantity B = (sin δ)2 is a measure of the rotation of the principal stress axes, withδ being the rotation angle of the principal stresses.
The RH rule proposed by Liang and Ma [46] is ambitious in that it attempts to accountfor the rotation of principal stress directions. However, it is not clear how values for thefour model parameters associated with this RH rule are to be determined. In general, it isdesirable to formulate a RH rule that invokes fewer model parameters.
3.5 Rules Proposed by Whittle and co-Workers
In conjunction with their MIT-E3 model, Whittle and Kavvadas [66] proposed the followingRH rule:
α = ψ0 〈rx〉1
p′0(s− σ′α)εpv (3.8)
From equation (3.8) it is evident that α is proportional to the volumetric plastic strainincrement. In equation (3.8) ψ0 is a model parameter that controls the rate or pace of ro-tation, and rx is a scalar describing the relative orientation of the yield surface with respect
15 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
to the critical state failure surface.
Pestana and Whittle [55] subsequently proposed a related, though more complex RH rulethat also included the deviatoric plastic strain εpq ; viz.,
α = ψ1 + einep′0
[rxm
⟨∂f
∂p′εpv
⟩+ ry
∣∣∣∣∂f∂q εpq∣∣∣∣] (η − α) (3.9)
where ψ has the same meaning as ψ0 in equation (3.8). The parameters rx(η, φcs) andry(η,K0) impose limits on the principal direction of anisotropy for consolidation along radialeffective stress paths and the residual anisotropy for shearing to large strain (critical state)conditions, respectively. An important feature of rx ensures that directions of anisotropyevolve more slowly when shearing in a compression test than in an extension test. For one-dimensional consolidation, the scalar ry guarantees full reorientation of the yield surface tothe prescribed value of K0NC (i.e., the value of K0 for a normally consolidated soil); it alsodefines the residual anisotropy at critical state, where the term involving εpv is zero.
3.6 Rule Proposed by Wheeler et al. [64]
Wheeler et al. [64] proposed the following RH rule, that was largely based on experimentalresults for Otaniemi clay:
α = µ[(χv(η)− α) 〈εpv〉+ β (χq(η)− α)
∣∣εpq∣∣] (3.10)
This RH rule satisfies the uniqueness of the CSL in e − ln(p′) space and includes thedeviatoric plastic strain. For loading along a stress path at constant stress-ratio, the RHrule results in α asymptotically approaching a target value between χv(η) and χq(η). Forexample, in cases where the volumetric strain dominates, the target value will be governed byχv(η). The values of the model parameters χv(η) and χq(η) are given based on experimentalresults for Otaniemi clay; in particular, χv = 3η
4and χq = η
3. The model parameter µ controls
the pace of rotation towards the target value, and the Macaulay brackets ensure that theRH is able to handle stress paths on the “dry” side of critical state (i.e., when η > M). Dueto the inclusion of the deviatoric plastic strain, the RH will not “freeze” the rotation of theyield surface at the critical state (where the volumetric plastic strain rate would be zero),thus producing more rotation towards a unique critical state value of α, resulting in a uniqueCSL in e− ln(p′) space [64].
3.7 Rule Proposed by Ling et al. [47]
Based on experimental observations and influenced by the work of Anandarajah and Dafalias [4],Ling et al. [47] proposed the following RH rule:
αij =(1 + ein)
λ− κ
(saijIo
)Λ1 (〈φ〉+ 〈L〉)Rkk (3.11)
16 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
where Rkk = (∂F/∂σij) δij, and
Λ1 = ψ1ξ exp
[−ψ2
ρ
|ρ|(1 + ρ)α
](3.12)
The quantities ψ1 and ψ2 are positive, dimensionless model parameters, and Io is in-cluded to normalize the evolution equation. The parameter ψ1 controls the magnitude ofthe rotational hardening; ψ2 controls the decay of the rotational hardening.
The anisotropic measure (α) in axisymmetric triaxial stress space is defined by
α =
√3
2αijαij (3.13)
The quantity ξ is included in order to express the anisotropic saturation for general three-dimensional stress states at critical state. The following analytical form is thus assumed:
ξ =
⟨1− J
N |I1|
⟩(3.14)
The quantity ρ is defined by
ρ =
(αij√αijαij
)Lsij =
√3
2
(1
α
)αijL
sij (3.15)
where Lsij is the following unit vector:
Lsij =Lij − 1
3Lmnδmnδij
|Lpq|=Lij − 1
3Lkkδij
|Lpq|(3.16)
The ρ function accounts for the change in the loading direction with respect to anisotropictensor. Consequently, α will become negative during extension or during stress reversals,thus causing the bounding surface to rotate towards the negative deviator stress q in triaxialspace. Moreover, if isotropic loading takes place following anisotropic consolidation, ρ willensure that the yield surface rotates towards the hydrostatic axis [4].
.
Remark: Equation (3.11) can also be written in the form
dαij = ψ ψij
where the magnitude of the rotational hardening is thus
ψ =(1 + ein)
λ− κΛ1 dε
ikk =
(1 + ein)
λ− κΛ1 (〈φ〉+ 〈L〉)Rkk
and the direction of the hardening is ψij =saijIo
. J
17 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Remark: From equation (3.11) is it evident that the rate of evolution of existing anisotropyis dependent on the current stress state and anisotropy by involving the reduceddeviatoric stress and exponential terms, respectively. The direction of change of theanisotropic tensor is assumed to coincide with the direction of reduced deviatoricstress [43]. J
Remark: The rotation of the bounding surface will be slowed as the anisotropy (representedby α, which is the scalar measurement of anisotropic tensor) increases. J
Remark: If a soil element experiences a radial stress path or a proportional incremen-tal strain process, the reduced deviatoric stress will be zero. Consequently, theanisotropic tensor remains unchanged. J
Remark: Equation (3.11) also shows that the evolution rate of anisotropy is explicitlyvolumetric and implicitly deviatoric because the rate of reduced deviatoric plasticstrain is related to the current reduced deviatoric stress. J
Remark: The positive model parameters ψ1 and ψ2 control the magnitude and decay,respectively, of the rotational hardening. If ψ1 = 0 then Λ1 = 0 and the response willbe purely isotropic. J
.
3.8 Rule Proposed by Dafalias et al. [21]
In conjunction with the SANICLAY model, Dafalias et al. [21] improved equation (3.1) tobe able to avoid excessive rotation so that α converges to a limiting value αb for loading atlarge stress ratios. The following modified RH rule was thus proposed:
α = 〈L〉 1 + einλ− κ
c
(p′
p′0
)2 ∣∣∣∣ ∂f∂p′∣∣∣∣ |η − xα| (αb − α) (3.17)
with
η/x > α⇒ αb = Mc or η/x < α⇒ αb = −Me (3.18)
In the above equations, αb is the “bounding” or limit value that controls the excessiverotation of the yield surface for loading at high stress-ratios. For example, if η/x > Mc thenα will converge asymptotically to its “bound” Mc due to the inclusion of the term αb − α.Similarly, if η/x < Mc then α will converge asymptotically to its “bound” −Me. Thus, ingeneral, |α| < M(θ), where θ is the Lode angle.
18 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
The term |η − xα| is the so-called “attractor”, that will attract and stabilize α at thevalue η/x before it reaches αb during constant η loading [21]. For loading at high stressratios, η/x is outside of Mc and −Me, so α will follow the bounds given by αb.
Due to the fact that the SANICLAY model uses a non-associative flow rule, α defines therotation of the plastic potential surface; a new term, β, must also be introduced to definethe rotation of the yield surface. For constant stress-ratio loading, β must asymptoticallyapproach α, but not η/x. Accordingly the term |η − xα| is replaced by |η − β|. The“bound” values in axisymmetric triaxial space are then given by η > β ⇒ βb = N orη < β ⇒ βb = −N , where N is the slope of the failure line in axisymmetric triaxial p′ − qspace.
3.9 Rule Proposed by Jiang et al. [40]
Jiang et al. [40] extended the anisotropic bounding surface model of Ling et al. [47] to includea non-associative flow rule. The following RH rule was used to describe the rotation of boththe bounding surface and the plastic potential:
αij =(1 + ein)
λ− κΛ1
(saijIo
)(〈φ〉+ 〈L〉)Rkk (3.19)
where
Λ1 = Wfsfα (3.20)
In equation (3.19) W is a model parameter,
fs =I1Io
(3.21)
and
fα = exp
[− ρ
|ρ|(1 + ρ) πα
](3.22)
with
ρ =
(αij|αpq|
)Lij − 1
3Lmnδmnδij
|Lpq|=
(αij|αpq|
)Lij − 1
3Lkkδij
|Lpq|(3.23)
.
Remark: The expression for αij given by equation (3.19) is identical in form to the expres-sion used in the formulation of Ling et al. [47]. The only difference is the manner inwhich Λ1 is defined. In particular, in the formulation of Ling et al.,
Λ1 = ψ1ξ exp [−ψ2 (1 + ρ)α]
19 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
where ψ1 and ψ2 are model parameters (recall equation 3.12). J
Remark: The presence of π in equation (3.22) is not only arbitrary, but it also precludes theproper evolution of αij. Consequently this term was removed from equation (3.22).J
Remark: Although the presence of fα was purported to cause αij to go to zero as the stressstate approached the critical state, it was found not to perform as such. Missing fromfα is the term
ξ =
⟨1− J
N |I1|
⟩which was successfully used by Ling et al. [47]. Anandarajah and Dafalias [4] used asimilar term, only with 0.90 replacing unity (recall equation 3.5). J
Remark: The use of the same RH rule for both the bounding surface and the plasticpotential means that the both surfaces will rotate together until the critical stateline is reached. This, however, precludes the robust simulation of material softening,which is predicated on the two surfaces rotating at different rates. J
.
3.10 Rule Proposed by Dafalias and Taiebat [22]
In assessing previously proposed RH rules, Dafalias and Taiebat [22] noted that, due to thepresence of the term ∂f/∂p′, the evolution of α will cease once the critical state1 is reached.Thus, loading under undrained conditions from some initial anisotropic (e.g., K0) stress statedefined on the normal consolidation line as (p′0, ein) to a final stress state where efinal = einwill result in different values of p′ for compression and extension tests, implying a non-uniquecritical state line (CSL) in ln(p′) - e space. This response is explained as a consequence ofthe lack of rotation of the yield surface towards the CSL on the extension side [22].
Dafalias and Taiebat [22] showed that by removing the ∂f/∂p′ term from the RH law,the yield surface will continue to rotate up to some specified limit so that a unique CSL willbe reached in e - ln(p′) space. However, due to the continued rotation, the undrained stresspaths will exhibit a “hook-type” shape when they approach the CSL. Such a shape is rarelyseen in experimental results for cohesive soils.
.
1Recall that the critical state is a unique state that should be reached independent of the stress pathfollowed. This state is represented by the critical state line in the q - p′ and e - ln(p′) space.
20 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Remark: It is timely to note that the results shown by Dafalias and Taiebat [22] wereobtained using an elastoplastic model that predicts only elastic strains inside theyield surface; accordingly, there is no rotation of the yield surface from the initialanisotropic stress state to the hydrostatic or p′ axis. The lack of rotation can, however,be avoided by using an elastoplastic bounding surface model that predicts plasticstrains for stress states within the bounding surface in both compression or extensiontests. J
.
To remedy the aforementioned shortcoming, albeit with the deficiency of the aforemen-tioned hook-type shape of the undrained stress paths, Dafalias and Taiebat [22] proposedthe following RH rule for the yield surface and plastic potential surface that satisfies theuniqueness of the CSL:
α = 〈L〉 cPatmp′
p′0(αb − α) ; αb = ±M
z
[1− exp
(−s |η|
M
)](3.24)
In this formulation α is the RH variable for both the yield surface and plastic potential.A new exponential term αb, that includes the two model parameters z and s, is included.However, it was shown that z = s is a reasonable assumption that simplifies the formulation.The term involving the initial void ratio, that is present in many RH rules, was incorporatedinto the c value.
By introducing the term αb, instead of η/x as previously in equation (3.2), the ratio α/Mincreases monotonically with increasing η/M up to a bounding value α/M < 1. Furthermore,in order to control the excessive rotation of the yield surface/plastic potential, a maximumvalue for α is used such αmax < min(Me, Ne). It was thus necessary to define an upperbound for αmax, given as a multiple of M ; i.e., when η > ξM , with ξ > 0, the product ξM issubstituted for η in the rate equation of α, thus affecting the value of αmax. The maximumvalue that α can attain is in triaxial compression, thus for η > ξMc the maximum α value isgiven by
αmax =Mc
z[1− exp (−sξ)] ; where ξ ≤ −1
sln
[1− zmin(Me, Ne)
Mc
](3.25)
Dafalias and Taiebat [22] recommend that if extensively high constant η loading aboveM is not anticipated, the use of equation (3.25) is not necessary for simplicity. Even thoughequation (3.24) satisfies the expected requirements and was purported to satisfy the experi-mental data presented by Wheeler et al. [64] for Otaniemi clay, for the case of loading causingexcessive rotation and thus necessitating correction of the RH rule, is deemed to be overlycomplex.
21 A. Nieto-Leal and V. N. Kaliakin

Chapter 4
Towards an Improved RotationalHardening Rule for GeneralizedBounding Surface Model
4.1 RH Law for the Plastic Potential
Based on the discussion presented in the previous chapters it is evident that the minifabricand, to a lesser degree, the microfabric of cohesive soils change during loading. It followsthat a robust RH rule formulation must accurately simulate stress-induced anisotropy ofcohesive soils. Even though the macroscopic response of soils is governed largely by theminifabric, it is not practical to formulate a RH rule based on a discrete element formula-tion. As such, RH rules are typically written as a mathematical generalization, based oncontinuum mechanics, that accounts for both inherent and stress-induced anisotropy. Withinthe non-associative framework,1 two different rotational hardening parameters, β and α forthe bounding and plastic potential surfaces, respectively, are defined.2 It is logical to asso-ciate the bounding surface with soil anisotropy. In addition, due to the fact that the plasticpotential surface is used to compute inelastic strains, it is also meaningful to associate thissurface with soil anisotropy.3 Thus, initial (inherent) anisotropy and fabric evolution (stress-induced anisotropy) will be represented by the rotation of both the bounding surface andthe plastic potential surface.
It is timely to mention some thoughts about the critical or unique anisotropic state thatresults in a unique critical state line in the e − ln(p′) space [64; 22; 18].4 More recently,Dafalias and Taiebat [23] mentioned that zero or non-zero fabric evolution at critical statefor clays is a debatable issue, and it really is due to the fact that there is not enough ex-
1The non-associative flow rule gives the GBSM the ability to simulate the softening response observed insome cohesive soils such Boston Blue clay [45; 27] and Taipei silty clay [17; 16].
2The symbol (·) means that (·) is defined in the stress invariant space. In addition, the reduced stress
invariants are computed from βij by means of sβij = σ′ij − p′(δij + βij).
3Recall that soil deformation is the macroscopic representation of clay particle (or aggregation of clayparticles; i.e., clusters) reorientation or soil fabric evolution.
4Coombs et al. [18] referred to this state as the “Critical Anisotropic State” (CAS)
22

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
perimental data to show whether or not there is a unique critical anisotropic state. Forthis reason, while some authors have proposed a unique critical state line in the e − ln(p′)space, others did not [20; 4; 66; 55; 47; 21; 41] due to the use of the plastic volumetric strainincrement in the RH rule [22]; in these works no comments were addressed about the criticalanisotropic state. In addition, Yin and Chang [69] proposed a micromechanical stress-strainmodel that considers explicitly the location of critical state line in compression and extensiontests (e.g., (p′/p′0)cs). This model predicted multiple critical state lines in e − ln(p′) space.However, due to the lack of experimental results showing fabric evolution at the criticalstate, whether or not a model should predict a critical anisotropic state is still a debatableissue.
Having discussed different aspects of fabric evolution and the notion of a critical anisotropicstate (CAS), an improved RH rule, that is based on several previous works [4; 55; 47; 64;21; 41], is described in this report. First, following Pestana and Whittle [55] and Wheeleret al. [64], who evoked dependency of the RH rule on both the plastic volumetric and plasticdeviatoric strain increments, the current version also evokes such dependency. Dafalias [20]proposed that anisotropy will develop only if there is change of the plastic volumetric strainby means of ∂F/∂p′ (with L > 0). However, it is important to mention that anisotropyevolution has also been tied to the evolution of the deviatoric stress [32]. Thus, a RH rulethat depends on both plastic volumetric and deviatoric strain increments is a reasonableproposition. Second, the concept of a “bounding” term to control excessive rotation usedby Dafalias et al. [21] is also used. The following RH rule for the plastic potential surface isthus proposed:
αij =
(1 + einλ− κ
)[ψ(I/I0)
2 |χηη − α| |εpv|+⟨M − η
⟩nJ |εps|
] sαijI0
(M − α
)(4.1)
In Equation (4.1), the term (1 + ein/λ− κ) is included to maintain similarity with theisotropic hardening rule used in conjunction with bounding surface formulations. The quan-tity ein is the initial total void ratio corresponding to the reference configuration with respectto which engineering strains are measured; for natural strains ein represents the current totalvoid ratio. The critical state parameters λ and κ denote the negative of the slopes of theisotropic consolidation and swell/recompression lines, respectively, in a plot of void ratio (e)versus the natural logarithm of I. In addition, λ is also assumed to be the negative of theslope of the straight line trace of the failure surface (i.e., the critical state line) in e versusln(I) space.
Within the square brackets, the model parameter ψ controls the pace of the rotationalhardening, and the term (I/I0)
2 diminishes the rate of rotation for overconsolidated soils.The term |χηη − α| gives α→ χηη for constant stress ratio η loading5 [20]. This was calledthe “attractor” term by Dafalias et al. [21] because it will “attract” and stabilize α at thevalue χηη. By introducing this term, more accurate simulations of one-dimensional consoli-dation are obtained; with a suitable value chosen for χη, the model will thus predict correctvalues of K0.
5Recall that η = J/I.
23 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
The volumetric strain increment, |εpv|, makes the rotational hardening proportional to theplastic volumetric strain increment.6 Usually, this term is within Macaulay brackets to re-move the dependency on the plastic volumetric strain increment during dilation [64; 55; 18].7
Accordingly, if dilative response is simulated, the rate of rotation of the plastic potential willdecrease because only the plastic deviatoric strain increment contribute to it. However, it isimportant to keep the rotation of the plastic potential surface at a regular pace, specially inthe simulation of extension tests of anisotropic consolidated samples.
Turning the attention to the second term within the square brackets, the term⟨M − η
⟩is included to ensure that the rotation of the plastic potential surface will stop once thestress state reaches the critical state; i.e., αij → 0 when η → M .8 This is consistent withthe concept of a critical state, and makes the isotropic and rotational hardening stop theirevolution. For loading at η > M , this term becomes negative. Thus, the volumetric strainincrement will control the rotation of the plastic potential for loading paths on the dry sideof the critical state line.
The term nJ , given by Equation (4.2), is the component in the J-direction of the unitoutward normal to the bounding surface in I − J stress invariant space; as such, it is analways positive dimensionless quantity. It is introduced to eliminate the dependency on theplastic deviatoric strain increment if constant stress ratio η loading is in effect; in this case,the current stress point (I , J) is at the apex of the bounding surface as shown in Figure4.1a.9 This makes the calibration process easier because only one parameter (i.e., χη) mustbe calibrated for loading at constant stress ratio (e.g., K0) loading.
nJ =∂F/∂Jβ[(
∂F/∂I)2
+(∂F/∂Jβ
)2]1/2 (4.2)
The term |εps| makes αij proportional to the plastic deviatoric strain increment.10 Thisterm also ensures that the lower the strain level, the lower the rate of evolution of anisotropydue to deviatoric loading. It is also important to mention that ∂Q/∂Jα results positive dueto the fact that in invariant stress space Jα is always positive; thus, the sign of αij will bedictated by the last term (M − α), to be explained in the sequel. However, the absolutevalue is used to ensure the correct sign if formulated in p′ − q space, where q carries sign.
Finally, the term sαij/I0 gives the six-ij components of the tensor αij; it is normalized by
I0. The final term, (M − α), is used to control excessive rotation (e.g., α → M , αij → 0).
6Notice that εpv = 〈L〉 ∂Q/∂I = 〈L〉Rkk = 〈L〉Rijδij ; where Rij = ∂Q/∂σij .7Recall that dilative response is characteristic in high overconsolidated soils which gives negative plastic
volumetric strain increments.8This term was first used by Anandarajah and Dafalias [4] and subsequently by Ling et al. [47] and Jiang
et al. [41].9In constant stress ratio η loading the rotation of the bounding surface will converge to η (i.e., β → η).
Thereby, the stress state will be at the apex of the bounding surface giving ∂F/∂Jβ = 0.10Note that Pestana and Whittle [55] not only evoke dependency of the rotational hardening law on the
plastic volumetric and deviatoric strain, but also included the gradient of the yield surface, decomposed intoits volumetric and deviatoric parts.
24 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
This term was used by Dafalias et al. [21] as a “bounding” term to control excessive rotationof the plastic potential surface. Thus, for any type of loading approaching the critical state,α will still converge to M . This term will thus retard the rotation when α is approaching M .M(θβ) is a function of the reduced Lode angle θβ; it varies between the values Mc and Me,which are positive values. Also, from its definition α is always positive. It is important tonotice that the only term carrying sign in equation (4.1) is thus this “bounding” term,11 thusensuring the correct sign of αij for all directions of loading. For example, under axisymmetrictriaxial compression (i.e., positive q = σ′1 − σ′3) the rotation of the plastic potential surfacewill be in the same direction. If, however, unloading or axisymmetric triaxial extensionloading take place (i.e., negative q = σ′1 − σ′3) the rotation of the plastic potential is in theopposite direction [4].
4.2 RH Rule for the Bounding Surface
In a similar manner, the RH rule for the bounding surface is written as follows:
βij =
(1 + einλ− κ
)[ψ(I/I0)
2∣∣∣η − β∣∣∣ |εpv|+ ⟨M − η⟩nJ |εps|] sβijI0
(N − β
)(4.3)
where β∗ is a scalar value that controls the rotation of the bounding surface and sβij =
sij − 13σkkβij. The considerations already discussed for the case of the plastic potential sur-
face again apply. However, under constant stress ratio η loading, β will now converge toη instead of χηη [21]. In Equation (4.3) N is a parameter that defines the shape of thebounding surface; it is also a function of the reduced Lode angle θβ. In order to bettercapture softening, when the stress state approaches the critical state (i.e., ∂Q/∂I → 0), βwill converge to N and not to M as was defined for α (recall Equation 4.1). This will ensurethat the peak strength given by the tip or upper part of the bounding surface is not going tointersect the critical state line.12 Thus, a lower strength will intersect the critical state line,which results in the softening response. That is, the strength on F = 0 at the critical stateis not the peak strength (see Figure 4.1a), but is the strength at a value given by the stressratio N [21]. The bounding surface defines the strength of the soil. Thus, due to the factthat the rotation of the bounding surface is typically less than the rotation of the plasticpotential, the loss of strength associated with softening can thus be captured by the model.
To conclude, the RH rules given by Equations (4.1) and (4.3) involve two model pa-rameters, namely ψ and χη. Suitable values for ψ are typically determined by comparingtriaxial compression and extension experimental results with simulations. To determine asuitable value for χη, a constant stress ratio η loading test, such as a one-dimensional K0
consolidation test, is required.
.
11In invariant stress space Jβ and α do not carry sign, and M(θβ) is always positive.12Assuming that for most soils, N < M .
25 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Remark: If the contribution of the plastic deviatoric strain increment, εps, is not taken intoaccount in equations (4.1) and (4.3), the rotational hardening laws proposed in theSANICLAY model are obtained [21]. J
Remark: In their the SANICLAY model, Dafalias et al. [21] assumed N to be independentof the reduced Lode angle. J
.
It is also important to note that, as written above, the new RH rule does not predict aunique critical state line in e − ln(p′) space. This is because the rotation of the boundingsurface will stop once the stress state reaches the critical state by means of η = M , which willstop the evolution of β before it reaches a critical state value βcs [23]. To get a unique criticalstate line, Dafalias and Taiebat [23] showed that the ratio (p′/p′0)cs at critical state must beindependent of the loading history and mode of loading through the ratio β/M obtainedfrom the rotational hardening rule; stated alternately, the ratio (p′/p′0)cs must be Lode angleindependent. It has also been shown that allowing the evolution of the rotational hardeningparameter (e.g., β), even after the stress state has reached the critical state (i.e., η = M),up to a specified equilibrium or to the Critical Anisotropic State (CAS) by removing theterm ∂F/∂p′ 13 will result in the prediction of the unique critical state line in the e− ln(p′)space. Thus, in the sequel is introduced a modified rotational hardening parameter in orderto reach the unique critical anisotropic state.
4.3 Critical Anisotropic State
In this section, the modifications to the rotational hardening parameter βij required topredict a unique CAS are addressed. It is only necessary to replace the term M − η in (4.3)by χcη − β. Equation (4.3) thus becomes:
βij =
(1 + einλ− κ
)[ψ(I/I0)
2∣∣∣η − β∣∣∣ |εpv|+ |χcη − β|nJ |εps|] sβijI0
(N − β
)(4.4)
At critical state εpv = ∂Q/∂I = 0. Thus, in order to obtain the desired result of βij = 0,it follows that the quantity (χcη− β) must be also zero (or, alternately, η = β/χc). Using thesubscript “cs” to indicate values at critical state, and noting that η = M at critical state, itfollows that
χcM − βcs = 0 (4.5)
Following the work by Dafalias and Taiebat [23], the relation (p′/p′0)cs is obtained fromexplicit form of the bounding surface. For the Generalized Bounding Surface Model thegeneral equation describing the bounding surface is
F = (R− 1)2(
Jβ
ωF/(3√
3)
)2
+(I − I0
)(I +
R− 2
RI0
)= 0 (4.6)
13Recall that this term has been widely used to stop the evolution of the rotational hardening when thestress state reach the critical state [20; 10; 21].
26 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
or alternately in triaxial p′ − q space
F = (q − p′β)2(R− 1)2 + ω2F
(p′ +
R− 2
Rp′0
)(p′ − p′0) = 0 (4.7)
4.3.1 Non-associative flow rule
In the case of a non-associative flow rule, assuming R = 2.0 and ω2F = N2 − β2. Equation
(4.7) thus becomesF = (q − p′β)2 + (N2 − β2)p′(p′ − p′0) = 0 (4.8)
Solving for (p′/p′0)cs gives(p′
p′0
)cs
=1− (βcs/N)2
1 + (M/N)2 − 2(M/N)(βcs/N)(4.9)
Using the relation (βcs/N) = (βcs/M)(M/N) then gives(p′
p′0
)cs
=1− (βcs/M)2(M/N)2
1 + (M/N)2 − 2(M/N)(βcs/M)(M/N)(4.10)
Knowing that χc = βcs/M (= βcs/M) from equation (4.5),14 equation (4.10) can bere-written as follows (
p′
p′0
)cs
=1− χ2
c(M/N)2
1 + (M/N)2 − 2(M/N)2χc(4.11)
where the ratio M/N is constant for any type of loading provided the same Lode angle de-pendency factor is used for both model parameters. Accordingly, the ratio (p′/p′0)cs becomesconstant and dependent only on the three model parameters M , N , and χc. If M = N (i.e.,associative flow rule) and βij = 0 (i.e., the isotropic form of the model), equation (4.11) gives(p′/p′0)cs = 1/2, which corresponds to the Modified Cam Clay model.
Having explained the new RH rule, it is timely to discuss the role of the χc parameter.Dafalias and Taiebat [23] mentioned the importance of predicting a unique CSL. However, theratio (p′/p′0)cs obtained by their rotational hardening is not controlled; i.e., the rotationalhardening will converge to some value that is based on the values chosen for the modelparameters. Coombs et al. [18], on the other hand, proposed a RH rule that will also convergeto a critical anisotropic state (CAS), but the ratio (p′/p′0)cs is now related to experimentalresults. Thus, a specified value of (p′/p′0)cs will be predicted based on the experimentalresults plotted in e− ln(p′) space, which gives this ratio. In the same way, solving equation(4.11) for χc gives
χc =
(p′
p′0
)cs
+1
M
√N2 −MN
(p′
p′0
)cs
+M2
(p′
p′0
)2
cs
(4.12)
14Recall that the relation between quantities in invariant space and triaxial space is obtained by means ofthe 3
√3 factor; e.g., M = 3
√3M .
27 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
where M is the slope of the critical state line in the p′− q space, N is the parameter definingthe shape of the bounding surface, and (p′/p′0)cs can be obtained from a typical undrainedtriaxial compression and extension tests (this ratio is obtained by plotting e versus ln(p′) andcalculating the distance between the normal consolidation line and the critical state line.).Finally, by using this new RH rule for the bounding surface (Equation (4.4)), a unique CASwill be predicted, with the saturation value giving the correct (p′/p′0)cs ratio correspondingto the experimental data for the soil being simulated.
4.4 RH Rule for Associative Flow Rule
The use of an associative flow rule is a simplification of the non-associative formulation bymeans of using the same expression for the plastic potential surface and bounding surface(i.e., F = Q); thus, some limitations arise. For example, due to the fact that only a singlesurface defines both the plastic potential and the bounding surface, only one rotationalhardening rule is required, namely αij. This rotational hardening rule cannot, however, bethe same that was used in conjunction with the non-associative formulation. Accordingly,the rotational hardening for the bounding surface is defined by the following equation:
αij =
(1 + einλ− κ
)[ψ(I/I0)
2 |χηη − α| |εpv|+⟨M − η
⟩nJ |εps|
] sαijI0
(M − α
)(4.13)
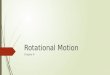
where the role of all the terms has been previously explained (see Section 4.1). In Figure4.1b is shown the schematic illustration of this rotational hardening for the K0 loading case.
28 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
(a) Non-associative flow rule.
(b) Associative flow rule.
Figure 4.1: Rotational hardening for constant stress ratio η loading.
29 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
4.5 A Special Loading Case
By including the plastic deviatoric strain increment, the realistic simulation of the specialloading case is possible. Assume a sample with OCR = 1/R (Figure 4.2). In this case the“image” stress point on the surface is located at the intersection of the plastic potential andthe critical state line. At this point ∂Q/∂p′ = ∂Q/∂I = 0. Thus, all RH rules that arefunctions solely of ∂Q/∂p′ or ∂Q/∂I will give αij = 0. Consequently, the plastic potentialwill not harden rotationally. In addition, since most isotropic hardening rules are a functionof ∂Q/∂p′ or ∂Q/∂I, it follows that the plastic potential will also not harden isotropically.The inclusion of the term εps = ∂Q/∂Jα thus remedies this deficiency, for it allows for thesurface to continue to harden rotationally.
Figure 4.2: Schematic illustration of special loading case with OCR = 1/R and constant p′
loading.
4.6 Relations Between Stress Invariant I − J and p′− qSpace and Lode Angle Dependency
The scalar measure of the rotation of the plastic potential in stress invariant space is definedas follows:
α =
√3
2αij αij (4.14)
The anisotropic tensor in stress invariant and triaxial p′ - q space are related through
α = α/(3√
3) (4.15)
The dimensionless stress ratio in p′ - q space is η = q/p′. Since q can be positive or neg-ative and p′ is almost exclusively positive, it follows that η will carry the sign of q. In stressinvariant space, η = J/I. Since J is always positive and I is almost exclusively positive, itfollows that η will always be positive. Finally, since I = 3p′ and J = ±q/(3
√3), it follows
30 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
that η = η/(3√
3).
The slope of the critical state line in stress invariant space (M) is related to its counterpartin p′ - q space (M) by M = M/(3
√3). Both M and M are functions of the reduced Lode
angle θα according to
M (θα) = g (θα, k)Mc, and M (θα) = g (θα, k) Mc
where k = Me/Mc = Me/Mc, with Me = M(−π/6) and Mc = M(π/6) being the valuesof M associated with axisymmetric triaxial extension and compression, respectively, andMe = M(−π/6) and Mc = M(π/6) being the values of M associated with axisymmetrictriaxial extension and compression, respectively.
The dimensionless function g (θα, k) must take on the values g (−π/6, k) = k and g (π/6, k) =1. A simple form of this function is [60]
g (θα, k) =
[2k4
1 + k4 − (1− k4) sin 3θα
] 14
(4.16)
The parameters N = N(θα) and N = N(θα) are similar in nature to M and M , respec-tively, but serve to define the shape of the bounding surface. Physically, N represents ameasure of shear strength with respect to the anisotropic line, which makes an angle of βwith respect to the p′-axis in p′ - q space. The parameter in stress invariant space (N) isrelated to its counterpart in p′ - q space (N) by N = N/(3
√3). Both N and N are functions
of the reduced Lode angle θα according to
N (θα) = g (θα, k2)Nc, and N (θα) = g (θα, k2) Nc
where k2 = Ne/Nc = Ne/Nc, with Ne = N(−π/6) and Nc = N(π/6) being the valuesof N associated with axisymmetric triaxial extension and compression, respectively, andNe = N(−π/6) and Nc = N(π/6) being the values of N associated with axisymmetric triaxialextension and compression, respectively. The dimensionless function g (θα, k2), which musttake on the values g (−π/6, k2) = k2 and g (π/6, k2) = 1, is again given by equation (4.16).
4.7 Excessive Rotation
To control excessive rotation of the plastic potential for large stress ratios, the term (M − α)is used. Since J is always positive and I is also always positive, it follows that η = J/I willalways be positive. In addition, the partial derivative ∂Q/∂J will likewise always be positive.Also, recall the use of the absolute value in the term involving all the partial derivatives inequations (4.1) and (4.3). In light of these observations, it follows that the sign of αij will bedetermined solely by the sign of the quantity (M − α). In particular, consider the followingcases:
31 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
• If η > Mc: The term(M − α
)=(Mc − α
)will thus be negative, thus giving a
negative α. This, in turn, corresponds to a clockwise rotation of the plastic potential.
• If 0 < η < Mc: The term(M − α
)=(Mc − α
)will thus be positive, thus giving
a positive α. This, in turn, corresponds to a counterclockwise rotation of the plasticpotential.
• If 0 < η < Me: The term(M − α
)=(Me − α
)will thus be positive, thus giving
a positive α. This, in turn, corresponds to a counterclockwise rotation of the plasticpotential.
• If η > Me: The term(M − α
)=(Me − α
)will thus be negative, thus giving a
negative α. This, in turn, corresponds to a clockwise rotation of the plastic potential.
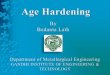
Next consider the case in p′ - q space. Since all other terms entering equation (4.1) arepositive, it follows that the sign of (M − α) will determine the sign of α. Recalling thatnon-zero values of η can be either positive or negative, consider the following cases:
• Axisymmetric triaxial compression with η > Mc (sector A in Figure 4.3): This couldresult in an updated α > Mc. The term (M − α) = (Mc − α) will thus be negative,resulting in α < 0. This, in turn, corresponds to a clockwise rotation of the plasticpotential, which is the desired result.
• Axisymmetric triaxial compression with ηK0 < η < Mc (sector B in Figure 4.3): Inthis case α < Mc. The term (M − α) = (Mc − α) will thus be positive. It follows thatα > 0, indicating a counterclockwise rotation.
• Axisymmetric triaxial extension with ηK0 > η > 0 and 0 < η < Me (sector C inFigure 4.3): In this case α < Me. The term (M − α) = (−Me − α) will thus benegative. It follows that α < 0, indicating a clockwise rotation of the plastic potential.
• Axisymmetric triaxial extension with η > Me (sector D in Figure 4.3): In this caseα > Me. The term (M − α) = (−Me − α) will thus be positive. It follows that α > 0,indicating a counterclockwise rotation of the plastic potential.
4.8 Determination of Suitable Values for χη, χc, and ψ
Two options are available for determining initial values of αij. First, some equations canbe used to compute the initial αij [47]. Secondly, it is possible to determine suitable ini-tial values of αij by beginning a simulation from an initial stress state that is isotropic.As such, αij = 0 initially. The sample is then sheared to a prescribed value of K0, whichwill be the initial condition for the next loading path (e.g., triaxial compression or extension).
Besides knowing suitable initial values of αij that characterize the initial anisotropy,a suitable value must be determined for the model parameter χη. Typically this is done
32 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
Figure 4.3: Sign of α corresponding to different loading conditions on a θα = constant plane.
by matching drained experimental stress paths with η = ηK = constant (or η = ηK =constant) [21]. The value of χη is determined so that α = αK = ηK/χη (or α = αK = ηK/χη).Dafalias et al. [21] presented the following closed-form expression for determining χη (in theirpaper this parameter is called χ):
αk =ηkχη
=Bεη3k + [2(1− (κ/λ))−BM2
c ]εηk −M2c
2ε [1− (κ/λ)](4.17)
where
B = − 2(1 + ν)
9(1− 2ν)
κ
λ
and ε = εv/εq. Different stress paths with constant ηK loading correspond to different valuesof ε.
The most frequently used stress path corresponds to uniaxial or K0 conditions. In thiscase ε2 = ε3 = 0, implying that εv = ε1 and εq = 2
3ε1. Thus, ε = εv/εq = 3/2. Since
σ′2 = σ′3 = K0σ′1, p
′ = (σ′1 + 2σ′3)/3 = (1 + 2K0)σ′1 and q = σ′1 − σ′3 = (1−K0)σ
′1. Thus,
ηK = ηK0 =q
p′=
3(1−K0)
(1 + 2K0)(4.18)
where K0 is the coefficient of earth pressure at a rest. This coefficient can be estimated fromwell-known empirical relations [39; 7; 11]. Thus, knowing K0, ηK = ηK0 is first computedusing equation (4.18). Then, knowing λ, κ, Mc and ν, the only unknown in equation (4.17)is χη.
33 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
For example, using the experimental results of Nadarajah [50] (K0 = 0.64, λ = 0.270,κ = 0.060, Mc = 0.806, ν = 0.30), equation (4.18) gives ηK0 = 0.474. Substituting thesevalues into equation (4.17) gives
ηkχη
= 0.312 ⇒ χη =0.312
0.474= 1.517
Table 4.1 summarizes the χη values obtained using equations (4.18) and (4.17). In certaincases, χη is seen to be negative, which is an inadmissible value. Consequently, the use ofequation (4.17) is deemed unreliable.
Table 4.1: Values of x Determined for Different Soils using Equation (4.17)
Soil λ κ M ν K0 ηk ηk/χ χη
Lower Cromer Till [21] 0.063 0.009 1.180 0.20 0.490 0.773 0.486 1.59
Lower Cromer Till [28] 0.066 0.008 1.180 0.20 0.490 0.773 0.469 1.57
Boston Blue Clay [65] 0.184 0.034 1.390 0.28 0.480 0.796 0.339 2.35
Nadarajah data [50] 0.270 0.060 0.806 0.30 0.640 0.474 0.312 1.52
Kaolin [54] 0.276 0.054 0.880 0.28 0.640 0.474 0.266 1.78
Kaolin [61] 0.140 0.050 1.178 0.20 0.800 0.231 -0.423 −0.55
” 0.140 0.050 1.178 0.20 0.667 0.429 -0.132 −3.25
” 0.140 0.050 1.178 0.20 0.571 0.601 0.145 4.15
Equation (4.17) came from the specific form of the bounding surface expression andwhether or nor the elastic volumetric and deviatoric strain increments are included. Forexample, for the simple case of a surface defined by F = (q−p′α)2− (M2−α2)p′(p′0−p′) = 0we have ∂F/∂p′ = (M2 − η2) and ∂F/∂q = 2(η − α). Thus, the following expression for thedilatancy results:
εpvεps
=(M2 − η2)2(η − α)
(4.19)
Then, knowing that εv = λλ−κ ε
pv and neglecting the elastic deviatoric strain increment (i.e.,
εs ≈ εps), Equation (4.19) can be written for uniaxial or K0 conditions (i.e., ε = εv/εs = 3/2)as follows:
εpvεps
=(M2 − η2K0
)
2(ηK0 − αK0)=
3
2(4.20)
Solving for αK0 gives
αK0 =η2K0
+ 3ηK0 [1− (κ/λ)]−M2
3[1− (κ/λ)](4.21)
34 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
If the elastic volumetric strain increment is neglected (i.e., κ = 0), the term [1 − (κ/λ)]reduces to unity in equation (4.21). In Table 4.2 are shown the resulting values of χη usingequations (4.17) and (4.21) and also equation (4.21) with κ = 0.
Table 4.2: Comparison of χη value determined for different soils using Equations (4.17) and(4.21)
χη Eq. (4.17) χη Eq. (4.21) χη Eq. (4.21) κ = 0
Lower Cromer Till [21] 1.59 1.67 1.52
Lower Cromer Till [28] 1.57 1.63 1.52
Boston Blue Clay [65] 2.35 3.00 2.19
Nadarajah data [50] 1.52 1.63 1.43
Kaolin clay [54] 1.78 1.93 1.63
Kaolin clay [61] −0.55 −0.50 −1.08
−3.25 −2.19 15.74
4.15 8.77 2.32
From Table 4.2 it is evident that these closed form solutions that have been used tocalibrated χη [64; 21; 23] do not guarantee a correct value for all soils considered herein.In addition, for some soils, the difference between χη is quite large. It means that theseequations are quite sensitive to the particular parameter values used. For this reason, theformer closed form solution for χη should only be used to get an initial value of this modelparameter. Then, simulation of a drained K0 loading path will be the best strategy to verifythe calculated χη or to determine an improved value.
Notice that the model parameters χc (for the non-associative formulation) and ψ arenot active while calibrating χη. This is because once the constant stress ratio η loadingis reached, the rotational hardening rule is only influenced by χη. Thus, after determiningthe correct value for χη, the model parameter χc is computed from equation (4.12). It isimportant to mention that the model parameter N (which defines the shape of the boundingsurface in the non-associative flow rule) must be calibrated by comparison between simu-lations and experimental data from isotropic undrained compression and extension triaxialtests so the rotational hardening is not active. Finally, the model parameter ψ is calibratedby comparison between simulations and experimental data from anisotropic undrained com-pression and extension triaxial tests.
35 A. Nieto-Leal and V. N. Kaliakin

Bibliography
[1] Anandarajah, A. Discrete element method for simulating behavior of cohesive soil.Journal of Geotechnical Engineering, ASCE, 120(9):1593–1613, 1994.
[2] Anandarajah, A. On Influence of Fabric Anisotropy on the Stress-Strain Behavior ofClays. Computers and Geotechnics, 27(1):1–17, 2000.
[3] Anandarajah, A. Numerical Simulation of One-Dimensional Behaviour of a Kaolinite.Geotechnique, 50(5):509–519, 2000.
[4] Anandarajah, A. and Dafalias, Y. F. Bounding surface plasticity iii: Application toanisotropic cohesive soils. Journal of Engineering Mechanics, ASCE, 112(12):1292–1318, 1986.
[5] Anandarajah, A. and Kuganenthira, N. Some Aspects of Fabric Anisotropy of Soil.Geotechnique, 45(1):69–81, 1995.
[6] Anandarajah, A., Kuganenthira, N., and Zhao, D. Variation of Fabric Anisotropy ofKaolinite in Triaxial Loading. Journal of Geotechnical Engineering, ASCE, 122(8):633–640, 1996.
[7] Aplan, I. The empirical evaluation of the coefficient k0 and k0r. Soils and Foundations,7(1):31–40, 1967.
[8] Bai, X. and Smart, R. Change in microstructure of kaolin in consolidation and undrainedshear. Geotechnique, 47(5):1009–1017, 1997.
[9] Baker, R. and Desai, C. S. Induced anisotropy during plastic straining. InternationalJournal for Numerical and Analytical Methods in Geomechanics, 8(2):167–185, 1984.
[10] Banerjee, P. K. and Yousif, N. B. A plasticity model for the mechanical behavior ofanisotropically consolidated clay. International Journal for Numerical and AnalyticalMethods in Geomechanics, 10(5):521–541, 1986. doi: {10.1002/nag.1610100505}.
[11] Brooker, E. W. and Ireland, H. O. Earth pressure at rest related to stress history.Canadian Geotechnical Journal, 2(1):1–15, 1965.
[12] Casagrande, A. and Carrillo, N. Shear failure of anisotropic materials. Proceedings ofthe Boston Society of Civil Engineers, 31:74–87, 1944.
36

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
[13] Cetin, H. and Gakoglu, A. Soil structure changes during drained and undrained triaxialshear of a clayey soil. Soils and Foundations, 53(5):628–638, 2013.
[14] Chai, J.C., Miura, N., and Aramaki, G. Simulating 1-d compression of clay by discreteelement method. In Proc. Inter. Symposium on Lowland Technology, pages 91–98, Saga,Japan, 1998.
[15] Chang, C.S., Hicher, P.Y., Yin, Z.Y., and Kong, L.R. Elastoplastic Model for Claywith Microstructural Consideration. Journal of Engineering Mechanics, ASCE, 135(9):917–931, 2009.
[16] Chin, C. T. and Liu, C. C. Volumetric and undrained behaviors of Taipei silty clay.Journal of the Chinese Institute of Civil and Hydraulic Engineering, 9(4):665–678, 1997.
[17] Chin, C. T., Cheng, T. Y., and Liu, C. J. Relationship between undrained shear strengthand overconsolidation ratio of Taipei Silt. Journal of the Chinese Institute of Civil andHydraulic Engineering, 1(3):245–250, 1989.
[18] Coombs, W.M., Crouch, R.S., and Augarde, C.E. A unique critical state two-surfacehyperplasticity model for fine-grained particulate media. Journal of the Mechanics andPhysics of Solids, 61(1):175–189, 2013.
[19] Dafalias, Y. F. On elastoplastic-viscoplastic constitutive modelling of cohesive soils. InDungar, R. and Studer, J. A., editors, Geomechanical Modelling in Engineering Practice,chapter 13, pages 313–330. A. A. Balkema, Amsterdam, 1986.
[20] Dafalias, Y. F. An anisotropic critical state soil plasticity model. Mechanics ResearchCommunications, 13(6):341–347, 1986.
[21] Dafalias, Y. F., Manzari, M. T., and Papadimitriou, A. G. SANICLAY: simpleanisotropic clay plasticity model. International Journal for Numerical and AnalyticalMethods in Geomechanics, 30(12):1231–1257, 2006.
[22] Dafalias, Y.F. and Taiebat, M. Anatomy of rotational hardening in clay plasticity.Geotechnique, 63(16):1406–1418, 2013. doi: {10.1680/geot.12.P.197}.
[23] Dafalias, Y.F. and Taiebat, M. Rotational hardening with and without anisotropicfabric at critical state. Geotechnique, 64(6):507–511, 2014.
[24] Delage, P. and Lefebre, G. Study of the structure of a sensitive Champlain clay and ofits evolution during consolidation. Canadian Geotechnical Journal, 21(1):21–35, 1984.
[25] Dudoignon, P., Pantet, A., Carrara, L., and Velde, B. Macro-micro measurement ofparticle arrangement in sheared kaolinitic matrices. Geotechnique, 51(6):493–499, 2001.
[26] Duncan, J.M. and Seed, H.B. Anisotropy and stress reorientation in clay. Soil Mechanicsand Foundations Division, 92(SM5):21–49, 1966.
[27] Fayad, P. Aspects of the volumetric and undrained behavior of boston blue clay. Master’sthesis, MIT, Cambridge, MA, 1986. Department of Civil Engineering.
37 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
[28] Gens, A. Stress-strain and strength of a low plasticity clay. PhD thesis, Imperial College,London University, 1982.
[29] Graham, J., Noonan, M. L., and Lew, K. V. Yield states and stress strain relationshipsin a natural plastic clay. Canadian Geotechnical Journal, 20(3):502–516, 1983.
[30] Gutierrez, M., Ishihara, K., and Towhata, I. Noncoaxiality and stress-dilatancy relationsfor granular materials. In Beer, G., Booker, J. R., and Carter, J. P., editors, ComputerMethods and Advances in Geomechanics, Rotterdam, 1991. Balkema.
[31] Hattab, M. Critical state notion and microstructural considerations in clays. ComptesRendus Mecanique, 339(11):719–726, 2011.
[32] Hattab, M. and Fleureau. Experimental study of kaolin particle orientation mechanism.Geotechnique, 60(5):323–331, 2010.
[33] Hattab, M. and Fleureau, J.M. Experimental analysis of kaolinite particle orientationduring triaxial path. International Journal for Numerical and Analytical Methods inGeomechanics, 35:947–968, 2011.
[34] Hattab, M., Bouziri-Adrouche, S., and Fleureau, J.M. Evolution de la microtextured‘une matrice kaolinitique sur chemin triaxial axisymetrique. Canadian GeotechnicalJournal, 47(1):34–48, 2010.
[35] Hicher, P.Y., Wahyudi, H., and Tessier, D. Microstructural analysis of strain localisationin clay. Computers and Geotechnics, 16(3):205–222, 1994.
[36] Hicher, P.Y., Wahyudi, H., and Tessier, D. Microstructural analysis of inherent andinduced anisotropy in clay. Mechanics of Cohesive-frictional Materials, 5(5):341–371,2000.
[37] Hicher, P.Y., Wahyudi, H., and Tessier, D. Microstructural analysis of inherent andinduced anisotropy in clay. Mechanics of Cohesive Frictional Materials, 5(5):341–371,2000.
[38] Holtz, R. D., Kovacs, W. D., and Sheahan, T. C. An Introduction to GeotechnicalEngineering. Pearson Education, Inc., Upper Saddle River, NJ, 2011.
[39] Jaky, J. The coefficient of earth pressure at rest. Journal of the Society of HungarianArchitects and Engineers, pages 355–358, 1944.
[40] Jiang, J., Ling, H. I., and Kaliakin, V. N. An associative and non-associativeanisotropic bounding surface model for clay. Journal of Applied Mechanics, ASME,79(3):doi.org/10.1115/1.4005958, 2012. (Jim Rice Special Edition).
[41] Jiang, J., Ling, H.I., and Kaliakin, V.N. An Associative and Non-AssociativeAnisotropic Bounding Surface Model for Clay. Journal of Applied Mechanics-ASME,79(3):1–10, 2012. doi: {10.1115/1.4005958}.
38 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
[42] Kaliakin, V.N. and Nieto-Leal, A. Towards a generalized bounding surface model forcohesive soils. In Proceedings of the 5th Biot Conference on Poromechanics (BIOT-5),pages 1011–1020, Vienna, Austria, 2013. ASCE.
[43] Kavvadas, M. J. Non-linear Consolidation Around Driven Piles in Clays. PhD thesis,M.I.T., Cambridge, MA, 1982.
[44] Kuganenthira, N., Anandarajah, A., and Zhao, D. Measurement of fabric anisotropy intriaxial shearing. Geotechnique, 46(4):657–670, 1996.
[45] Ladd, C. C. and Varallyay, J. The influence of stress system on the behavior of saturatedclays during undrained shear. Technical Report R65-11, MIT, Department of CivilEngineering, 1965.
[46] Liang, R. Y. and Ma, F. Anisotropic plasticity model for undrained cyclic behavior ofclays. i: Theory. Journal of Geotechnical Engineering, ASCE, 118(2):229–245, 1992.
[47] Ling, H. I., Yue, D., Kaliakin, V. N., and Themelis, N. J. An anisotropic elasto-plasticbounding surface model for cohesive soils. Journal of Engineering Mechanics, ASCE,128(7):748–758, 2002.
[48] Martin, R. T. and Ladd, C. C. Fabric of consolidated kaolinite. Clays and Clay Minerals,23(1):17–25, 1975.
[49] Mitchell, J. K. and Soga, K. Fundamentals of Soil Behavior. John Wiley and Sons,New York, NY, 2nd edition, 2005.
[50] Nadarajah, V. Stress-Strain Properties of Lightly Overconsolidated Clays. PhD thesis,Cambridge University, Cambridge, UK, 1973.
[51] Oda, M. Inherent and induced anisotropy in plasticity theory of granular soils. Me-chanics of Materials, 16(1-2):35–45, 1993.
[52] Oda, M. and Nakayama, H. Introduction of inherent anisotropy of soils in the yield func-tion. In Satake, M. and Jenkins, J. T., editors, Micromechanics of Granular Materials,pages 81–90, Elesvier, Amsterdam, 1988.
[53] Oda, M. and Nakayama, H. Yield function for soil with anisotropic fabric. Journal ofEngineering Mechanics, ASCE, 15(1):89–104, 1989.
[54] Parry, R. H. G. and Nadarajah, V. Observation on laboratory prepared, lightly over-consolidated specimens of kaolin. Geotechnique, 24(3):345–358, 1973.
[55] Pestana, J. M. and Whittle, A. J. Formulation of a unified constitutive model for claysand sands. International Journal for Numerical and Analytical Methods in Geome-chanics, 23(12):1215–1243, 1999. doi: {10.1002/(SICI)1096-9853(199910)23:12〈1215::AID-NAG29〉3.0.CO;2-F}.
[56] Prevost, J. H. Anisotropic undrained stress-strain behavior of clays. Journal of Geotech-nical Engineering, ASCE, 104(8):1075–1090, 1978.
39 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
[57] Pusch, R. Microstructural changes in soft quick clay at failure. Canadian GeotechnicalJournal, 7(1):1–7, 1970.
[58] Roscoe, K. H. and Burland, J. B. On the generalized stress-strain behaviour of wetclay. In Heyman, J. and Leckie, F. A., editors, Engineering Plasticity, pages 535–609,Cambridge, UK, 1968. Cambridge University Press.
[59] Sachan, A. and Penumadu, D. Effect of microfabric on shear behavior of kaolin clay.Journal of Geotechnical and Geoenvironmental Engineering, ASCE, 133(3):306–318,2007.
[60] Sheng, D., Sloan, S. W., and Yu, H. S. Aspects of finite element implementation ofcritical state models. Computational Mechanics, 26:185–196, 2000.
[61] Stipho, A. S. Theoretical and Experimental Investigation of the Behavior of Anisotrop-ically Consolidated Kaolin. PhD thesis, University College, Cardiff, England, 1978.
[62] Tavenas, F. and Leroueil, S. Effects of stress and time on yielding of clays. In Proceedingsof the 9th International Conference on Soil Mechanics and Foundation Engineering,pages 319–326, Tokyo, 1977.
[63] Tobita, Y. Fabric tensors in constitutive equations for granular materials. Soils andFoundations, 29(4):99–104, 1989.
[64] Wheeler, S.J., Naatanen, A., Karstunen, M., and Lojander, M. An anisotropic elasto-plastic model for soft clays. Canadian Geotechnical Journal, 40(2):403–418, 2003. doi:{10.1139/T02-119}.
[65] Whittle, A. J. Evaluation of a constitutive model for overconsolidated clays.Geotechnique, 43(2):289–313, 1993. time-independent response.
[66] Whittle, A. J. and Kavvadas, M. J. Formulation of MIT-E3 constitutive model foroverconsolidated clays. Journal of Geotechnical Engineering, ASCE, 120(1):173–198,1994. doi: {10.1061/(ASCE)0733-9410(1994)120:1(173)}. time-independent response.
[67] Yao, M. and Anandarajah, A. Three-dimensional discrete element method of analysisof clays. Journal of Engineering Mechanics, ASCE, 129(6):585–596, 2003.
[68] Yin, Z. Y., Hattab, M., and Hicher, P.Y. Multiscale modeling of a sensitive marine clay.International Journal for Numerical and Analytical Methods in Geomechanics, 35(15):1682–1702, 2011.
[69] Yin, Zhen-Yu and Chang, Ching S. Non-uniqueness of critical state line in compressionand extension conditions. International Journal for Numerical and Analytical Methodsin Geomechanics, 33(10):1315–1338, JUL 2009. doi: {10.1002/nag.770}.
[70] Yin, Z.Y. and Chang, C.S. Microstructural modelling of stress-dependent behaviour ofclay. International Journal of Solids and Structures, 46(6):1373–1388, 2009.
40 A. Nieto-Leal and V. N. Kaliakin

Research ReportUniversity of Delaware
Department of Civil and Environmental Engineering
[71] Yin, Z.Y., Chang, C.S., Hicher, P.Y., and Karstunen, M. Micromechanical analysis ofkinematic hardening in natural clay. International Journal of Plasticity, 25(8):1413–1435, 2009.
[72] Yin, Z.Y., Chang, C.S., Hicher, P.Y., and Wang, J.H. Micromechanical analysis of thebehavior of stiff clay. Acta Mechanica Sinica, 27(6):1013–1022, 2011.
41 A. Nieto-Leal and V. N. Kaliakin