Embed Size (px)
Citation preview

A Randomized Polynomial-Time Simplex Algorithm for Linear Programming
Daniel A. Spielman, Yale
Joint work with Jonathan Kelner, M.I.T.

where is a n x d matrix, Rn
Terminology:c = objective functionb = right-hand side vector
A has rows a1,…,an
Linear Programming
maximize
subject to

Linear Programming Algorithms1940s—Dantzig, simplex method
First practical method for solving linear programs
Runs efficiently in practice on most problems
No known variant ran in worst-case poly time
1979—Khachiyan, EllipsoidPoly time, but usually slower than simplex
1984—Karmarkar, Interior Point MethodsPoly time, sometimes slower than simplex,
sometimes faster

Simplex Methods
Typically, walk on vertices and edges of feasible polytope
Not known if graph on vertices and edges has polynomial diameter (See Kalai-Kleitman)
Simplex methods have been generalized to walk on more general graphs. Ex.: Self-dual simplex (Dantizg, Lemke), Criss-cross, Admissible pivots (See Fukuda-Lüthi-Namiki)

Main Result
A Randomized Polynomial-Time LP Simplex Method polynomial dependence on bit-length
Walks on perturbations of polytopes generated from original LP problem
No bound on diameters of polytopes
A worst-case analysis inspired by Smoothed Analysis (S-Teng),
Overview
1. Reduce to problem of certifying boundedness
2. Boundedness does not depend on RHS,
3. Perturb , and run shadow-vertex simplex on perturbed polytope to generate certificate of boundedness
4. If fail, adjust distribution on perturbations, and try again.
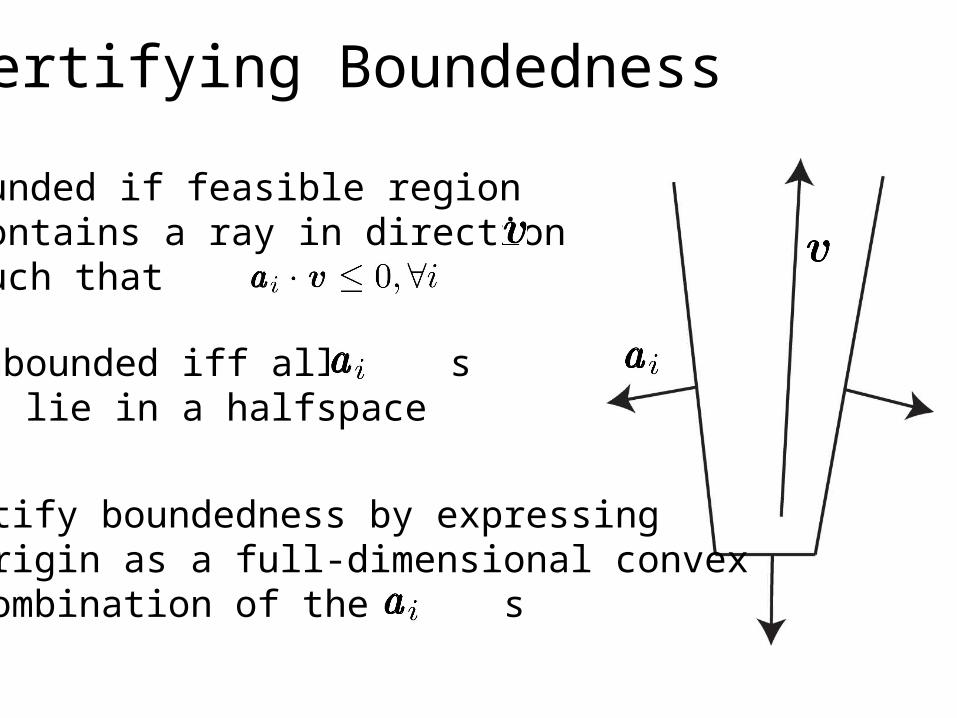
Certifying Boundedness
Unbounded if feasible region contains a ray in direction such that
Unbounded iff all s lie in a halfspace
Certify boundedness by expressing origin as a full-dimensional convex combination of the s

Reduction to certifying boundedness
Recall dual LP:
Combine primal and dual so that just need feasible
Standard reduction to certifying boundedness, removing degeneracy by deterministic perturbation (See Megiddo-Chandrasekaran)
Boundedness Certification Problem
Need to show origin in
To apply simplex method, consider polytope
Boundedness independent of , so can perturb
Find certificate by optimizing random and , using shadow-vertex simplex method

Perturbing
Walking on perturbed polytope is the same
as walking on possibly infeasible vertices
of original polytope
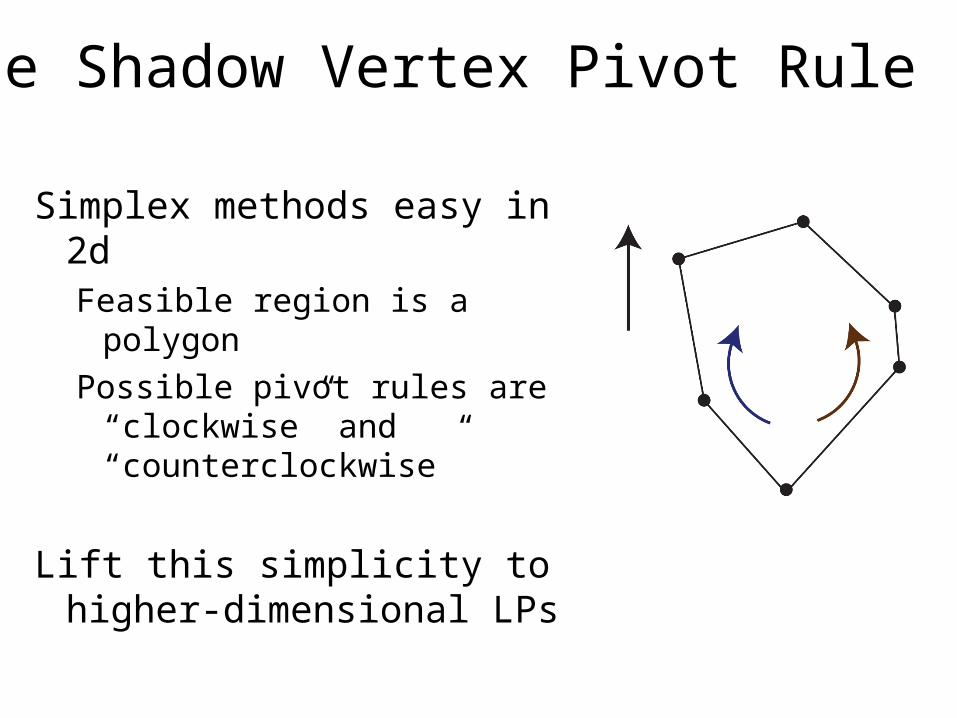
Simplex methods easy in 2dFeasible region is a polygon
Possible pivot rules are “clockwise” and “counterclockwise”
Lift this simplicity to higher-dimensional LPs
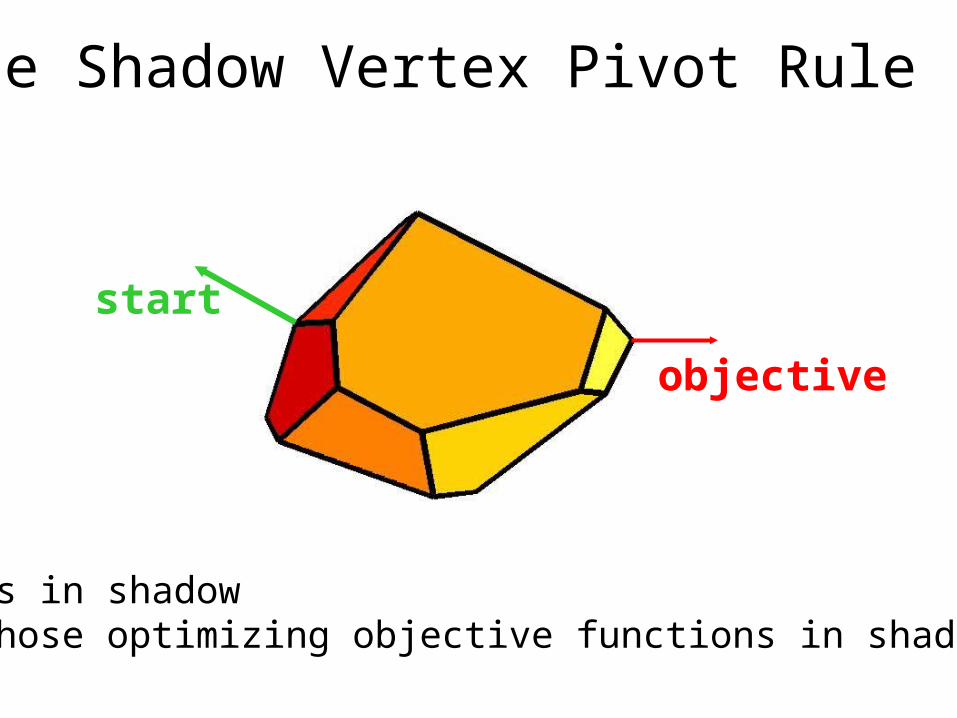
The Shadow Vertex Pivot Rule

The Shadow of a Polytope
Vertices Vertices, Edges Edges
objective
start
The Shadow Vertex Pivot Rule
Vertices in shadow = those optimizing objective functions in shadow plane

Definition: A polytope is k-well-rounded if
where = radius r ball centered at origin
Well-Rounded Polytopes

Perturbing a Well-Rounded Polytope
Given k-well-rounded polytope
Perturb, to get
Where ri are exponential rand vars
with expectation 1/n:

Perturbing a Well-Rounded Polytope
Theorem:
For a uniform random shadow plane V,
Expected number edges of shadow of onto V is at most
Where, P is k-well-rounded,

Proof of well-rounded shadow bound
Expected length of perimeter of shadow of is <
For every potential edge, given that it appears on the shadow, expected length of its shadow is >
So, expect at most edges

Expected length of edge on shadow
An edge is determined by the set of
d-1 constraints that are tight on it
For each , let be event that
it appears on the convex hull of Q and in the shadow on V.
If appears in shadow, let be its length
Lemma:

Expected length of edge on tope
If appears, let be its length
For each , let be event that
it appears on the convex hull of Q.
Lemma:

Arbitrarily set ri for all Consider line L of points
satisfying ai
Tx=1+ri for all
Every other constraint intersects this line either positively or negatively
Edge length is distance between intersection points of max neg. constraint and min pos. constraint
Proof: Expected length edge on tope

As perturb , intersection point
moves by at least size of perturbation
Small edge unlikely now follows from memoryless property of exponential distribution:
Proof: Expected length edge on tope

Proof: Expected length of shadow edge
Projection unlikely to decrease edge length too much
Let be angle of edge to V.
Lemma:
Remark: Simple if do not condition upon

Proof: Expected length of shadow edge
Lemma:
To condition on ,
Note in shadow iff V intersects
So, parameterize V by point in and a point orthogonal to that
Compute integral in these new variables
Obstacles to obtaining algorithm
Cannot use random 2-plane: Must have start vertex and objective function. Resolve by planting start vertex, and slightly extending theorem.
Polytope is not necessarily well-rounded. But, when fail, learn how to make it rounder.

Starting
Observe that did not need uniform random 2-plane: only need polynomial randomness, so take span(c, v), where v is random.
Insert a vertex optimizing a 1/poly ball around by adding d artificial constraints near
Will become the start vertex
Vertex optimizing c will not involve artificial constraints
Choose c from a 1/poly ball around

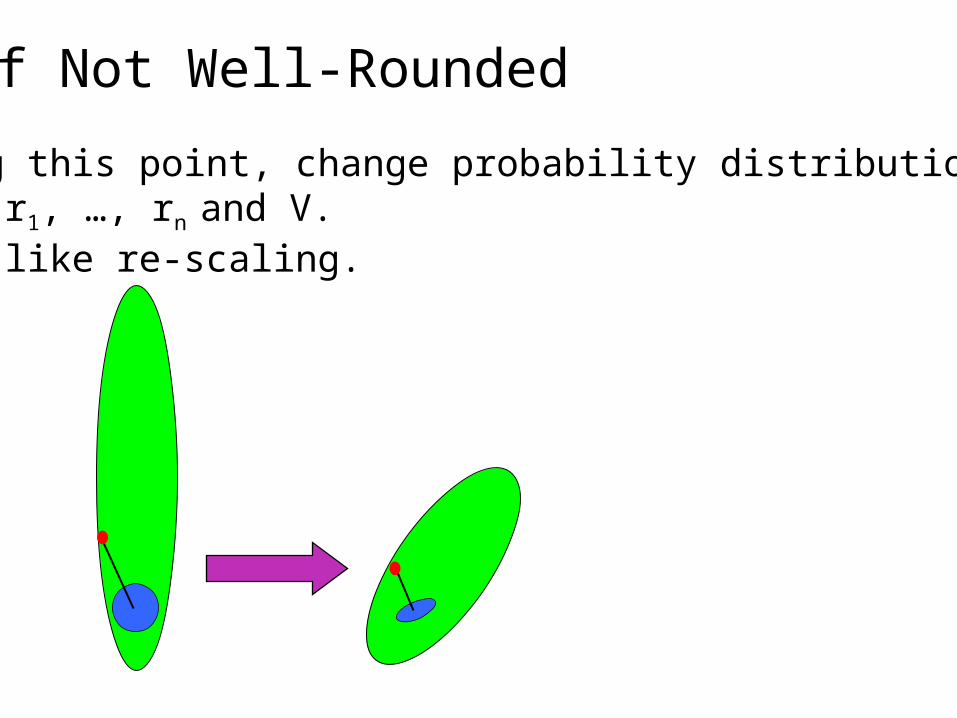
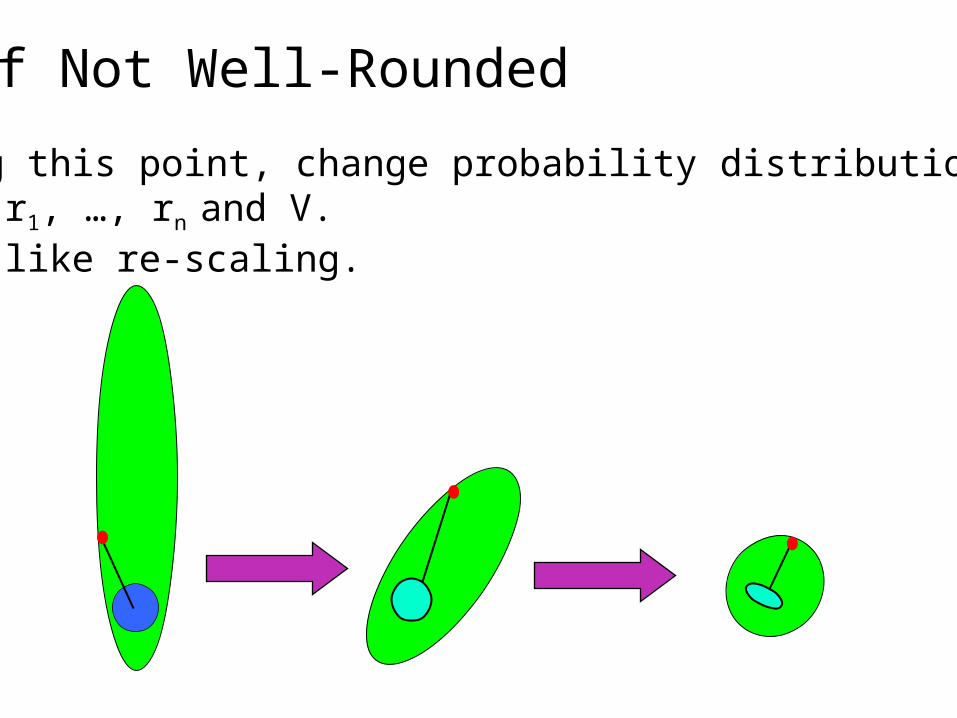
If Not Well-Rounded
Run algorithm as if it were well-rounded
If do not go all the way around shadow, learn a point in polytope of large norm.
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.
Only need to do number times polynomial in bit-length. Is only barrier to strongly-polynomial time.

If Not Well-Rounded
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.
If Not Well-Rounded
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.

If Not Well-Rounded
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.

If Not Well-Rounded
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.
If Not Well-Rounded
Using this point, change probability distributions on r1, …, rn and V. Is like re-scaling.
Open Questions
Strongly Polynomial Algorithm?
Other Algorithmic Applications?