Embed Size (px)
Citation preview
![Page 1: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/1.jpg)
Research ArticleA Parameter Adaptive MOMEDA Method Based on GrasshopperOptimization Algorithm to Extract Fault Features
ChengJiang Zhou 12 JunMa 12 JiandeWu 12 and Zezhong Feng12
1Faculty of Information Engineering and Automation Kunming University of Science and Technology Kunming 650500 China2Engineering Research Center for Mineral Pipeline Transportation of Yunnan Province Kunming 650500 China
Correspondence should be addressed to Jun Ma majun kmfoxmailcom
Received 5 September 2018 Revised 8 December 2018 Accepted 13 January 2019 Published 5 March 2019
Academic Editor Changzhi Wu
Copyright copy 2019 ChengJiang Zhou et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
The nonstationary components and noises contained in the bearing vibration signal make it particularly difficult to extract faultfeatures and minimum entropy deconvolution (MED) maximum correlated kurtosis deconvolution (MCKD) and fast spectralkurtosis (FSK) cannot achieve satisfactory results However the filter size and period range ofmultipoint optimalminimumentropydeconvolution adjusted (MOMEDA) need to be set in advance so it is difficult to achieve satisfactory filtering results Aiming atthese problems a parameter adaptive MOMEDA feature extraction method based on grasshopper optimization algorithm (GOA)is proposed Firstly the multipoint kurtosis (MKurt) of MOMEDA filtered signal is used as the optimization objective and theoptimal filter size and periodic initial value whichmatched with the vibration signal can be determined adaptively throughmultipleiterations of GOA Secondly the periodic impact contained in the vibration signal is extracted by the optimized MOMEDA andthe fault features in the impact signal are extracted by Hilbert envelope demodulation Finally the simulation signal and bearingsignal are processed by the proposed approach The results show that the introduction of GOA not only solves the problem ofparameter selection in MOMEDA but also achieves better performance compared with other optimization methods Meanwhilethe feasibility and superiority of the approach are fully proved by comparing it with the three methodsMEDMCKD and FSK afterparameter optimization Therefore this approach provides a novel way and solution for fault diagnosis of the rolling bearing gearand shaft
1 Introduction
The bearing is an important rotating part widely used inmanufacturing transportation aerospace and other fieldsand one of the most vulnerable rotating components Bear-ing failure may cause catastrophic damage to the rotatingmachinery and lead to serious loss of life and propertyTherefore bearing health monitoring and fault diagnosis areparticularly important [1] At present the time-frequencyanalysis technology is the most popular feature extractionmethod However the bearing vibration signal containscomplex background noise and interference componentsand satisfactory feature extraction results cannot be obtainedby using the traditional time-frequency analysis methods [2]Therefore it is of great significance to explore the simple andeffective feature extraction methods
The fault impact and vibration source can be extractedfrom the vibration signal by Hilbert envelope demodulation[3] However thismethod is only applicable to the single AM-FM signal Therefore signal preprocessing is required beforedemodulation Signal decomposition and mode selection arethemost commonly used preprocessingmethodsThe empir-ical mode decomposition (EMD) [4] is the most classicalmethod In order to prevent mode mixing caused by the dis-continuous signal in the screening process ensemble empir-ical mode decomposition (EEMD) [5] complete ensembleempirical mode decomposition adaptive noise (CEEMDAN)[6] and other methods were proposed Zhou et al [7] firstdecomposed the bearing signal into several modes by EEMDthen extracted the weighted permutation entropy (PE) of theprevious modes and diagnosed the bearing faults throughSVMensemble classifier Lv et al [8] decomposed the bearing
HindawiMathematical Problems in EngineeringVolume 2019 Article ID 7182539 22 pageshttpsdoiorg10115520197182539
2 Mathematical Problems in Engineering
signal by CEEMDAN and calculated the improvedmultivari-ate multiscale sample entropy of the effective modes and themethod realizes the bearing early fault diagnosis Inspiredby EMD Smith et al proposed local mean decomposition(LMD) [9] In order to improve its mode mixing problema variety of improved methods have been proposed such asensemble local mean decomposition (ELMD) [10] completeensemble local mean decomposition (CELMD) [11] etcZhang et al [12] proposed a weak fault diagnosis methodbased on mask signal and LMD which can not only suppressthe modal mixing of LMD but also effectively extract thefault features Wang et al [13] decomposed the bearing signalby ELMD and then selected the effective product functions(PF) according to kurtosis and finally extracted the fault pulseinformation by using fast spectral kurtosis (FSK) Recentlyvariational mode decomposition (VMD) [14] empiricalwavelet transform (EWT) [15] and other methods have beenused for signal decomposition Wang et al [16] proposed animproved VMD based on PE and white noise which canadaptively select themode number of VMD and is insensitiveto noise Zhang et al [17] proposed an adaptive VMD basedon grasshopper optimization algorithm (GOA) which canadaptively determine the parameters of VMD accordingto the signal characteristics and the decomposition per-formance of the algorithm is improved Wang et al [18]proposed the sparsity guided EWT which can automaticallyestablish the Fourier segments required by empirical wavelettransform Luo et al [19] proposed the autoregressive EWTwhich detects the boundaries of the autoregressive powerspectrum by Burg algorithm This method avoids the errorboundary caused by white noise and nonstationary signalThrough these methods the signal is decomposed into manysubsignals in different frequency bands Then some indica-tors are often used to determine sensitive modes includingcorrelation coefficient kurtosis energy and entropy Further-more FSK [20] cyclostationary analysis (CA) [21] stochasticresonance (SR) [22] and other signal processing methodshave also received increasing attention
The deconvolution method is another effective signalprocessing method which can extract the impact compo-nents contained in the vibration signal Minimum entropydeconvolution (MED) and maximum correlation kurtosisdeconvolution (MCKD) are the most popular deconvolutionmethods Endo et al usedMED to diagnose the fault of rotat-ing machinery for the first time [23] Li et al [24] determinedthe filter size of MED by constructing the power spectralkurtosis index and then extracted the impact componentsin the filtered signal by time-delay feedback mono-stablestochastic resonance Abboud et al [25] enhanced the impactcomponent of the signal through MED then constructedthe optimal frequency band by FSK and finally extractedfault features by Hilbert envelope demodulation Althoughmechanical faults can be detected by MED the MED filteris not necessarily the optimal filter In addition the periodicimpact signals contained in the vibration signal cannot beefficiently extracted by MED Mcdonald et al [26] proposedMCKD which can extract a series of fault impacts fromthe vibration signal Wan et al [27] calculated the period ofMCKD according to the estimated characteristic frequency
and then extracted the early fault features contained in thefiltered signal by FSK The period and filter size of MCKDneed to be set in advance so themethod lacks adaptability In2017 McDonald et al [28] proposed the multipoint optimalminimum entropy deconvolution adjusted (MOMEDA)Themethod does not require the iterative solution in the filteringprocess and it can extract the periodic fault impact accordingto the multipoint kurtosis (MKurt) in the period range [29]Wang et al [30] successfully extracted the multiple impactcomponents from the simulation signal and gearbox vibra-tion signal byMOMEDA Zhu et al [31] extracted the impactcomponents from the bearing signal by MOMEDA andthen extracted the fault features by Teager energy operator(TEO) Wang et al [32] analyzed the variable speed signalby MOMEDA and resampling order analysis technologyand achieved good results Since the early fault features ofthe gearbox are often submerged by strong noise Wanget al [33] first used MED to suppress the noise and thenextracted the composite fault features from the denoisedsignal by MOMEDA Cai et al [34] first used the ELMDand correlation coefficients to obtain the sensitivemodes andthey used the combined product function method (CPF) torecombine the PFwith the same period Finally periodic faultimpacts in the combined signal were extracted byMOMEDAThus the MOMEDA has been increasingly used in periodicimpact extraction and fault diagnosis
In the deconvolution algorithm a measure of a signal(also known as a norm) is first defined and then a filter isconstructed to maximize the norm of the filtered signal [28]The norms of MED MCKD and MOMEDA are kurtosiscorrelation kurtosis (CK) and multipoint kurtosis (MKurt)respectively In the methods MED and MCKD the filter sizeand the number of iterations affect the norm of the filteredsignal In addition the period is the main factor influencingthe filtering effect of the MCKD Therefore the parameteroptimization of deconvolution algorithms is particularlyimportant and the existing methods are mostly based onkurtosis Cheng et al [35] optimized the filter parametersof MED by particle swarm optimization (PSO) and thensuccessfully extracted fault features by optimized MEDInstance et al [36] optimized the filter size and the numberof iterations of MED by shuffled frog leaping algorithm(SFLA) and the method avoids the subjectivity of artificiallyselected parameters Miao et al [37] estimated the periodof MCKD by calculating the autocorrelation of envelopesignals and improved the resampling process of MCKD Theabove methods improve the filtering performance of MEDand MCKD and provide the new idea and way for theparameter optimization problemofMOMEDAThefilter sizeand periodic initial value seriously affect the filtering resultsofMOMEDAMeanwhile the effects of these two parameterson the filtering results are nonlinear and complicated and thesatisfactory filtering results cannot be obtained by selectingrandom parameters Therefore the parameter optimizationof MOMEDA is of great significance Nowadays manynovel optimization methods are attracting attention suchas bat algorithm (BA) flower pollination algorithm (FPA)and cuckoo search algorithm (CS) etc Saremi et al [38]proposed the GOA in 2017 and compared it with a variety
Mathematical Problems in Engineering 3
of optimization algorithms The results show that GOA hasoutstanding advantages in optimizing the unimodal functionmultimodal function and compound function Zhang et al[17] optimized the mode number and penalty factor of VMDby GOA which not only improved the performance of VMDbut also improved the effects of feature extraction Barman etal [39] optimized the kernel function and penalty factor ofsupport vector machine (SVM) by GOA and then used themodel to predict the power load in the local climate
To solve the parameter selection problem of MOMEDAa parameter adaptive MOMEDA method based on GOAis proposed which combines the advantages of GOA andMOMEDA effectively Firstly the algorithm parameters areinitialized according to the signal characteristics Then weoptimize MOMEDA parameters by GOA algorithm In eachiteration the impact component contained in the mixedsignal is extracted by MOMEDA and the opposite of theMKurt is served as the objective function to optimize thefilter parameters Finally the optimizedMOMEDA is used toextract the impact component from the signals and the faultfeature is extracted through Hilbert envelope demodulationIn order to prove the validity of the proposed approachthe method is used to analyze the simulation signal CaseWestern Reserve University (CWRU) bearing dataset [40]and National Aeronautics and Space Administration (NASA)bearing dataset [41] To highlight the advantages of GOAthe algorithm is compared with PSO SFLA and gray wolfoptimization algorithm (GWO) [42] and then the proposedapproach is compared with the MOMEDA methods withfixed parameters Finally the proposed approach is comparedwith the three methods MED MCKD FSK after parameteroptimization The structure of the paper is shown in Fig-ure 1(b)
Themain contents of the paper are as followsTheories ofMOMEDA and GOA are introduced briefly in Section 2Theprocess of optimizing MOMEDA filter parameters is intro-duced in Section 3 The validity of the proposed approachis verified by simulation signal in Section 4 In Section 5the validity and reliability of the approach are validatedby CWRU dataset and NASA dataset In Section 6 theexperimental process and preliminary conclusions are dis-cussed The conclusions of the experiment are summarizedin Section 7
2 A Brief Review of the Diagnostic Techniques
21 MOMEDA The response signal can be expressed asfollows [33 34 43]
119910 (119899) = ℎ (119899) lowast 119909 (119899) + 119890 (119899) (1)
where 119910(119899) is the vibration signal 119909(119899) is the impact compo-nent ℎ(119899) is the system frequency response function and 119890(119899)is the background noise In order to reconstruct the impactcomponent the deconvolution process is as follows
119909 (119899) = 119891 (119899) lowast 119910 (119899) = 119871sum119897=1
119891119897119910119896+119871minus1 (2)
In (2) 119896 = 1 2 sdot sdot sdot 119873 minus 119871 where 119873 represents thesignal length and 119871 represents the filter size In view of the
characteristics of the periodic impact signal the multipointD-norm is introduced in this method as shown below
119872119906119897119905119894 119863 minus 119873119900119903119898 = 119872119863119873(997888rarr119910 997888rarr119905 ) = 1100381710038171003817100381710038171003817997888rarr119905 100381710038171003817100381710038171003817997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (3)
119872119874119872119864119863119860 = max997888rarr119891
119872119863119873(997888rarr119910 997888rarr119905 ) = max997888rarr119891
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (4)
where997888rarr119905 represents a constant vector and it is used to describethe position andweight of the target impactTheoptimal filtercan be obtained by solving the maximum of multipoint D-norm and the deconvolution process also obtains the optimalsolution at this time In order to calculate the extreme valueof (4) we first calculate the derivative of the filter coefficients997888rarr119891 = (1198911 1198912 sdot sdot sdot 119891119871)
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 ) =119889119889997888rarr119891
1199051119910110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 +119889119889997888rarr119891
1199052119910210038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 + sdot sdot sdot+ 119889119889997888rarr119891
119905119873minus119871119910119873minus11987110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (5)
119889119889997888rarr119891
11990511989611991011989610038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 =10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 119905119896997888rarr119872119896 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 1199051198961199101198961198830997888rarr119910 (6)
997888rarr119872119896 = [119909119909+119871minus1 119909119909+119871minus2 sdot sdot sdot 119909119896]119879 (7)
Therefore (5) can be transformed into the following form
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 )= 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 (1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871)minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910
(8)
The equation 1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871 = 1198830997888rarr119905 isused to simplify the formula above and (5) is equivalent tothe following formula
10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus11198830997888rarr119905 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910 = 997888rarr0 (9)
Then the equation (997888rarr119905 119879997888rarr119910997888rarr1199102)1198830997888rarr119910 = 1198830997888rarr119905 can beobtained Since 997888rarr119910 = 1198830119879997888rarr119891 assuming (11988301198830119879)minus1 exists thefollowing formula can be obtained
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr119910100381710038171003817100381710038172997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (10)
The special solution of (10) is a set of optimal filters andthe optimal filters can be expressed as follows
4 Mathematical Problems in Engineering
Calculate the fitness of each search agentT=the best search agentwhile (mltMax number of iterations M)
Update c using Eq (18) for each search agent
Normalize the distances between grasshoppers in [14]Update the position of the current search agent by Eq (17)Bring the current search agent back if it goes outside boundaries
end forUpdate T if there is a better solutionm=m+1
end whileReturn T
Initialize maximum number of iterations M cGR and cGCH
Initialize the swarm Xi(1 2 middot middot middot n)
(a) The implementation process of GOA
NormalInner ring
Outer ringRolling element
Parameter-adaptive MOMEDA method based on GOA
Comparison of feature extraction methods
FSK
MCK
DM
ED
Hilb
ert e
nvel
ope d
emod
ulat
ion
Parameters initialization
Optimized MOMEDA envelope
MKurt of MOMEDA filter signal
e optimization results of GOA
Comparison of envelope e optimized parameters
0 200 400 600 8000
0102030405
Filter size
Mku
rt
2 4 6 8 10
minus015
minus01
minus005
0
X 2Y -01816
The number of iterations
X 9Y -01825
0 200 400 600 8000
001
002
003
X 7031Y 001364
Frequency [Hz]
X 5684Y 001749X 4219
Y 001667X 2813Y 001086
X 1406Y 001952
0 002 004 006 008 01 012minus03
0
02
Time [s]
0 002 004 006 008 01 012minus004
0
004
Time [s]
0 002 004 006 008 01 012minus04
0
05
Time [s]
0 100 200 300 400 500 600 700 800 9000
3
0 100 200 300 400 500 600 700 800 9000
1
0 100 200 300 400 5000
1
0 100 200 300 400 500 600 700 800 9000
0025
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
1406
1496
1465
1465
MO
MED
A
frequency [Hz]0 1000 2000 3000 4000 5000 6000
01
162
263
364 0
02
04
06
08
Bear
ing
vibr
atio
n si
gnal
Bear
ing
vibr
atio
n si
gnal
fitness = minusMKurt= minus
(NminusL
sumn=1
tn2)2 (
NminusL
sumn=1
yn)4
(NminusL
sumn=1
tn8(
NminusL
sumn=1
y2 2n) )
tn
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
leve
l k
minus3times 10
minus3times 10
minus5times 10
(b) Parameter optimization process of MOMEDA
Figure 1 Parameter optimization process and the structure of the paper
Mathematical Problems in Engineering 5
997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (11)
1198830 =[[[[[[[[[[
119909119871 119909119871+1 119909119871+2 sdot sdot sdot 119909119873119909119871minus1 119909119871 119909119871+1 sdot sdot sdot 119909119873minus1119909119871minus2 119909119871minus1 119909119871 sdot sdot sdot 119909119873minus2 d
1199091 1199092 1199093 sdot sdot sdot 119909119873minus119871+1
]]]]]]]]]]119871 119887119910 119873minus119871+1
(12)
Then the original impact signal can be reconstructed bythe formula 997888rarr119910 = 1198830119879997888rarr119891 22 GOA GOA is a new bionic algorithm which simulatesthe foraging behavior of the grasshoppers [38] The behaviorof grasshoppers has the following characteristics the nymphsmove slowly and the step size of movement is small while theadults move fast in a wide range of parameter space There-fore the search mechanism of the GOA algorithm consists oftwo tendencies exploration and exploitation The algorithmoptimizes the objective function by judging the repulsionregion comfort zone and attraction region formed betweenthe grasshoppers GOA has the advantages of few parametersand high convergence accuracy The mathematical model ofGOA [38] is as follows
(1) The Initialization of the Population The grasshoppersrandom behavior can be represented by the following model
119883119894 = 119878119894 + 119866119894 + 119860 119894 (13)
119878119894 = 119873sum119895=1119895 =119894
119904 (119889119894119895) 119889119894119895119866119894 = minus119892119890119892119860 119894 = 119906119890119908
(14)
where 119883119894 represents the location of the 119894-th grasshopper119878119894 refers to the social interaction 119866119894 represents the gravityforce of the 119894-th grasshopper and 119860 119894 represents the windadvection In (14)119873 represents the number of grasshoppers119889119894119895 represents the distance between the 119894-th and the 119895-thindividual and 119889119894119895 = |119909119895 minus 119909119894| 119889119894119895 = (119909119895 minus 119909119894)119889119894119895 represents aunit vector The 119904 function is shown in (15) which representsthe social forces 119892 represents the gravitational constant and119890119892 represents a unit vector pointing to the earth 119906 is aconstant drift and 119890119908 represents a unit vector towards thewind direction
119904 (119903) = 119891119890minus119903119897 minus 119890minus119903 (15)where119891 represents the intensity of attraction and 119897 representsthe attractive length scale
(2) Location Update Substituting 119878119894 119866119894 and 119860 119894 in (13) thespecific position of the 119894-th grasshopper is as follows
119883119894 = 119873sum119895=1119895 =119894
119904 (10038161003816100381610038161003816119909119895 minus 11990911989410038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 minus 119892119890119892 + 119906119890119908 (16)
Equation (16) shows that the grasshoppers move quicklyto the comfort zone at which point the swarm has not founda specified point Therefore the model needs to be improvedbefore solving optimization problems Actually the modelis considered in free space and the gravity need not beconsidered (no 119866119894 component) At the same time we assumethat thewind direction is the same as the target direction (119879119889)An improved version of (16) is as follows
119883119889119894 = 119888( 119873sum119895=1119895 =119894
119888119906119887119889 minus 1198971198871198892 119904 (10038161003816100381610038161003816119909119889119895 minus 119909119889119894 10038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 )+ 119879119889
(17)
where 119906119887119889 and 119897119887119889 are the upper and lower boundaries ofthe D-dimensional search space respectively 119879119889 representsthe optimal solution found so far in the target direction Theouter 119888 adjusts the exploration and exploitation of the swarmnear the target Inner 119888 reduces the interaction betweengrasshoppers as the iteration number increases
(3) Balance of Search Ability The parameter 119888 is used tobalance the exploration and exploitation of the swarmwhich decreases linearly with the increase of iteration Thismechanism reduces the comfort zone and thus enhances theexploitation ability
119888 = 119888max minus 119898119888max minus 119888min119872 (18)
where 119888max and 119888min are the upper and lower boundaries of119888 respectively and they take 1 and 000004 in this paper119898 represents the current iteration and 119872 represents themaximum number of iterations
3 Parameter Adaptive MOMEDA MethodBased on GOA
Kurtosis can characterize the distribution density of theimpact signal and it has been widely used in signal pro-cessing MKurt is based on kurtosis it not only inherits thecharacteristics of the kurtosis but also extends its definitionto multiple pulses at controlled locations [28 33] ThereforeMKurt can not only provide location information of fault butalso indicate the energy and period of the fault signal [29]Meanwhile a larger MKurt characterizes a larger proportionof the periodic impacts [33]
119872119870119906119903119905 = (sum119873minus119871119899=1 1199051198992)2sum119873minus119871119899=1 (119905119899119910119899)4
(sum119873minus119871119899=1 1199051198998 (sum119873minus119871119899=1 1199102119899)2) (19)
So we expect to get the maximum of MKurt and theparameters of MOMEDA when the maximum is reachedin this paper Since the intention of GOA is to search forthe minimum of the objective function [17] the opposite ofMKurt is used as the objective function in this paper
119891119894119905119899119890119904119904 = min120574=119871119879119894
minus119872119870119906119903119905119871 isin [1 500] 119879119894 isin [50 150] (20)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 2: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/2.jpg)
2 Mathematical Problems in Engineering
signal by CEEMDAN and calculated the improvedmultivari-ate multiscale sample entropy of the effective modes and themethod realizes the bearing early fault diagnosis Inspiredby EMD Smith et al proposed local mean decomposition(LMD) [9] In order to improve its mode mixing problema variety of improved methods have been proposed such asensemble local mean decomposition (ELMD) [10] completeensemble local mean decomposition (CELMD) [11] etcZhang et al [12] proposed a weak fault diagnosis methodbased on mask signal and LMD which can not only suppressthe modal mixing of LMD but also effectively extract thefault features Wang et al [13] decomposed the bearing signalby ELMD and then selected the effective product functions(PF) according to kurtosis and finally extracted the fault pulseinformation by using fast spectral kurtosis (FSK) Recentlyvariational mode decomposition (VMD) [14] empiricalwavelet transform (EWT) [15] and other methods have beenused for signal decomposition Wang et al [16] proposed animproved VMD based on PE and white noise which canadaptively select themode number of VMD and is insensitiveto noise Zhang et al [17] proposed an adaptive VMD basedon grasshopper optimization algorithm (GOA) which canadaptively determine the parameters of VMD accordingto the signal characteristics and the decomposition per-formance of the algorithm is improved Wang et al [18]proposed the sparsity guided EWT which can automaticallyestablish the Fourier segments required by empirical wavelettransform Luo et al [19] proposed the autoregressive EWTwhich detects the boundaries of the autoregressive powerspectrum by Burg algorithm This method avoids the errorboundary caused by white noise and nonstationary signalThrough these methods the signal is decomposed into manysubsignals in different frequency bands Then some indica-tors are often used to determine sensitive modes includingcorrelation coefficient kurtosis energy and entropy Further-more FSK [20] cyclostationary analysis (CA) [21] stochasticresonance (SR) [22] and other signal processing methodshave also received increasing attention
The deconvolution method is another effective signalprocessing method which can extract the impact compo-nents contained in the vibration signal Minimum entropydeconvolution (MED) and maximum correlation kurtosisdeconvolution (MCKD) are the most popular deconvolutionmethods Endo et al usedMED to diagnose the fault of rotat-ing machinery for the first time [23] Li et al [24] determinedthe filter size of MED by constructing the power spectralkurtosis index and then extracted the impact componentsin the filtered signal by time-delay feedback mono-stablestochastic resonance Abboud et al [25] enhanced the impactcomponent of the signal through MED then constructedthe optimal frequency band by FSK and finally extractedfault features by Hilbert envelope demodulation Althoughmechanical faults can be detected by MED the MED filteris not necessarily the optimal filter In addition the periodicimpact signals contained in the vibration signal cannot beefficiently extracted by MED Mcdonald et al [26] proposedMCKD which can extract a series of fault impacts fromthe vibration signal Wan et al [27] calculated the period ofMCKD according to the estimated characteristic frequency
and then extracted the early fault features contained in thefiltered signal by FSK The period and filter size of MCKDneed to be set in advance so themethod lacks adaptability In2017 McDonald et al [28] proposed the multipoint optimalminimum entropy deconvolution adjusted (MOMEDA)Themethod does not require the iterative solution in the filteringprocess and it can extract the periodic fault impact accordingto the multipoint kurtosis (MKurt) in the period range [29]Wang et al [30] successfully extracted the multiple impactcomponents from the simulation signal and gearbox vibra-tion signal byMOMEDA Zhu et al [31] extracted the impactcomponents from the bearing signal by MOMEDA andthen extracted the fault features by Teager energy operator(TEO) Wang et al [32] analyzed the variable speed signalby MOMEDA and resampling order analysis technologyand achieved good results Since the early fault features ofthe gearbox are often submerged by strong noise Wanget al [33] first used MED to suppress the noise and thenextracted the composite fault features from the denoisedsignal by MOMEDA Cai et al [34] first used the ELMDand correlation coefficients to obtain the sensitivemodes andthey used the combined product function method (CPF) torecombine the PFwith the same period Finally periodic faultimpacts in the combined signal were extracted byMOMEDAThus the MOMEDA has been increasingly used in periodicimpact extraction and fault diagnosis
In the deconvolution algorithm a measure of a signal(also known as a norm) is first defined and then a filter isconstructed to maximize the norm of the filtered signal [28]The norms of MED MCKD and MOMEDA are kurtosiscorrelation kurtosis (CK) and multipoint kurtosis (MKurt)respectively In the methods MED and MCKD the filter sizeand the number of iterations affect the norm of the filteredsignal In addition the period is the main factor influencingthe filtering effect of the MCKD Therefore the parameteroptimization of deconvolution algorithms is particularlyimportant and the existing methods are mostly based onkurtosis Cheng et al [35] optimized the filter parametersof MED by particle swarm optimization (PSO) and thensuccessfully extracted fault features by optimized MEDInstance et al [36] optimized the filter size and the numberof iterations of MED by shuffled frog leaping algorithm(SFLA) and the method avoids the subjectivity of artificiallyselected parameters Miao et al [37] estimated the periodof MCKD by calculating the autocorrelation of envelopesignals and improved the resampling process of MCKD Theabove methods improve the filtering performance of MEDand MCKD and provide the new idea and way for theparameter optimization problemofMOMEDAThefilter sizeand periodic initial value seriously affect the filtering resultsofMOMEDAMeanwhile the effects of these two parameterson the filtering results are nonlinear and complicated and thesatisfactory filtering results cannot be obtained by selectingrandom parameters Therefore the parameter optimizationof MOMEDA is of great significance Nowadays manynovel optimization methods are attracting attention suchas bat algorithm (BA) flower pollination algorithm (FPA)and cuckoo search algorithm (CS) etc Saremi et al [38]proposed the GOA in 2017 and compared it with a variety
Mathematical Problems in Engineering 3
of optimization algorithms The results show that GOA hasoutstanding advantages in optimizing the unimodal functionmultimodal function and compound function Zhang et al[17] optimized the mode number and penalty factor of VMDby GOA which not only improved the performance of VMDbut also improved the effects of feature extraction Barman etal [39] optimized the kernel function and penalty factor ofsupport vector machine (SVM) by GOA and then used themodel to predict the power load in the local climate
To solve the parameter selection problem of MOMEDAa parameter adaptive MOMEDA method based on GOAis proposed which combines the advantages of GOA andMOMEDA effectively Firstly the algorithm parameters areinitialized according to the signal characteristics Then weoptimize MOMEDA parameters by GOA algorithm In eachiteration the impact component contained in the mixedsignal is extracted by MOMEDA and the opposite of theMKurt is served as the objective function to optimize thefilter parameters Finally the optimizedMOMEDA is used toextract the impact component from the signals and the faultfeature is extracted through Hilbert envelope demodulationIn order to prove the validity of the proposed approachthe method is used to analyze the simulation signal CaseWestern Reserve University (CWRU) bearing dataset [40]and National Aeronautics and Space Administration (NASA)bearing dataset [41] To highlight the advantages of GOAthe algorithm is compared with PSO SFLA and gray wolfoptimization algorithm (GWO) [42] and then the proposedapproach is compared with the MOMEDA methods withfixed parameters Finally the proposed approach is comparedwith the three methods MED MCKD FSK after parameteroptimization The structure of the paper is shown in Fig-ure 1(b)
Themain contents of the paper are as followsTheories ofMOMEDA and GOA are introduced briefly in Section 2Theprocess of optimizing MOMEDA filter parameters is intro-duced in Section 3 The validity of the proposed approachis verified by simulation signal in Section 4 In Section 5the validity and reliability of the approach are validatedby CWRU dataset and NASA dataset In Section 6 theexperimental process and preliminary conclusions are dis-cussed The conclusions of the experiment are summarizedin Section 7
2 A Brief Review of the Diagnostic Techniques
21 MOMEDA The response signal can be expressed asfollows [33 34 43]
119910 (119899) = ℎ (119899) lowast 119909 (119899) + 119890 (119899) (1)
where 119910(119899) is the vibration signal 119909(119899) is the impact compo-nent ℎ(119899) is the system frequency response function and 119890(119899)is the background noise In order to reconstruct the impactcomponent the deconvolution process is as follows
119909 (119899) = 119891 (119899) lowast 119910 (119899) = 119871sum119897=1
119891119897119910119896+119871minus1 (2)
In (2) 119896 = 1 2 sdot sdot sdot 119873 minus 119871 where 119873 represents thesignal length and 119871 represents the filter size In view of the
characteristics of the periodic impact signal the multipointD-norm is introduced in this method as shown below
119872119906119897119905119894 119863 minus 119873119900119903119898 = 119872119863119873(997888rarr119910 997888rarr119905 ) = 1100381710038171003817100381710038171003817997888rarr119905 100381710038171003817100381710038171003817997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (3)
119872119874119872119864119863119860 = max997888rarr119891
119872119863119873(997888rarr119910 997888rarr119905 ) = max997888rarr119891
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (4)
where997888rarr119905 represents a constant vector and it is used to describethe position andweight of the target impactTheoptimal filtercan be obtained by solving the maximum of multipoint D-norm and the deconvolution process also obtains the optimalsolution at this time In order to calculate the extreme valueof (4) we first calculate the derivative of the filter coefficients997888rarr119891 = (1198911 1198912 sdot sdot sdot 119891119871)
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 ) =119889119889997888rarr119891
1199051119910110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 +119889119889997888rarr119891
1199052119910210038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 + sdot sdot sdot+ 119889119889997888rarr119891
119905119873minus119871119910119873minus11987110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (5)
119889119889997888rarr119891
11990511989611991011989610038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 =10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 119905119896997888rarr119872119896 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 1199051198961199101198961198830997888rarr119910 (6)
997888rarr119872119896 = [119909119909+119871minus1 119909119909+119871minus2 sdot sdot sdot 119909119896]119879 (7)
Therefore (5) can be transformed into the following form
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 )= 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 (1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871)minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910
(8)
The equation 1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871 = 1198830997888rarr119905 isused to simplify the formula above and (5) is equivalent tothe following formula
10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus11198830997888rarr119905 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910 = 997888rarr0 (9)
Then the equation (997888rarr119905 119879997888rarr119910997888rarr1199102)1198830997888rarr119910 = 1198830997888rarr119905 can beobtained Since 997888rarr119910 = 1198830119879997888rarr119891 assuming (11988301198830119879)minus1 exists thefollowing formula can be obtained
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr119910100381710038171003817100381710038172997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (10)
The special solution of (10) is a set of optimal filters andthe optimal filters can be expressed as follows
4 Mathematical Problems in Engineering
Calculate the fitness of each search agentT=the best search agentwhile (mltMax number of iterations M)
Update c using Eq (18) for each search agent
Normalize the distances between grasshoppers in [14]Update the position of the current search agent by Eq (17)Bring the current search agent back if it goes outside boundaries
end forUpdate T if there is a better solutionm=m+1
end whileReturn T
Initialize maximum number of iterations M cGR and cGCH
Initialize the swarm Xi(1 2 middot middot middot n)
(a) The implementation process of GOA
NormalInner ring
Outer ringRolling element
Parameter-adaptive MOMEDA method based on GOA
Comparison of feature extraction methods
FSK
MCK
DM
ED
Hilb
ert e
nvel
ope d
emod
ulat
ion
Parameters initialization
Optimized MOMEDA envelope
MKurt of MOMEDA filter signal
e optimization results of GOA
Comparison of envelope e optimized parameters
0 200 400 600 8000
0102030405
Filter size
Mku
rt
2 4 6 8 10
minus015
minus01
minus005
0
X 2Y -01816
The number of iterations
X 9Y -01825
0 200 400 600 8000
001
002
003
X 7031Y 001364
Frequency [Hz]
X 5684Y 001749X 4219
Y 001667X 2813Y 001086
X 1406Y 001952
0 002 004 006 008 01 012minus03
0
02
Time [s]
0 002 004 006 008 01 012minus004
0
004
Time [s]
0 002 004 006 008 01 012minus04
0
05
Time [s]
0 100 200 300 400 500 600 700 800 9000
3
0 100 200 300 400 500 600 700 800 9000
1
0 100 200 300 400 5000
1
0 100 200 300 400 500 600 700 800 9000
0025
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
1406
1496
1465
1465
MO
MED
A
frequency [Hz]0 1000 2000 3000 4000 5000 6000
01
162
263
364 0
02
04
06
08
Bear
ing
vibr
atio
n si
gnal
Bear
ing
vibr
atio
n si
gnal
fitness = minusMKurt= minus
(NminusL
sumn=1
tn2)2 (
NminusL
sumn=1
yn)4
(NminusL
sumn=1
tn8(
NminusL
sumn=1
y2 2n) )
tn
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
leve
l k
minus3times 10
minus3times 10
minus5times 10
(b) Parameter optimization process of MOMEDA
Figure 1 Parameter optimization process and the structure of the paper
Mathematical Problems in Engineering 5
997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (11)
1198830 =[[[[[[[[[[
119909119871 119909119871+1 119909119871+2 sdot sdot sdot 119909119873119909119871minus1 119909119871 119909119871+1 sdot sdot sdot 119909119873minus1119909119871minus2 119909119871minus1 119909119871 sdot sdot sdot 119909119873minus2 d
1199091 1199092 1199093 sdot sdot sdot 119909119873minus119871+1
]]]]]]]]]]119871 119887119910 119873minus119871+1
(12)
Then the original impact signal can be reconstructed bythe formula 997888rarr119910 = 1198830119879997888rarr119891 22 GOA GOA is a new bionic algorithm which simulatesthe foraging behavior of the grasshoppers [38] The behaviorof grasshoppers has the following characteristics the nymphsmove slowly and the step size of movement is small while theadults move fast in a wide range of parameter space There-fore the search mechanism of the GOA algorithm consists oftwo tendencies exploration and exploitation The algorithmoptimizes the objective function by judging the repulsionregion comfort zone and attraction region formed betweenthe grasshoppers GOA has the advantages of few parametersand high convergence accuracy The mathematical model ofGOA [38] is as follows
(1) The Initialization of the Population The grasshoppersrandom behavior can be represented by the following model
119883119894 = 119878119894 + 119866119894 + 119860 119894 (13)
119878119894 = 119873sum119895=1119895 =119894
119904 (119889119894119895) 119889119894119895119866119894 = minus119892119890119892119860 119894 = 119906119890119908
(14)
where 119883119894 represents the location of the 119894-th grasshopper119878119894 refers to the social interaction 119866119894 represents the gravityforce of the 119894-th grasshopper and 119860 119894 represents the windadvection In (14)119873 represents the number of grasshoppers119889119894119895 represents the distance between the 119894-th and the 119895-thindividual and 119889119894119895 = |119909119895 minus 119909119894| 119889119894119895 = (119909119895 minus 119909119894)119889119894119895 represents aunit vector The 119904 function is shown in (15) which representsthe social forces 119892 represents the gravitational constant and119890119892 represents a unit vector pointing to the earth 119906 is aconstant drift and 119890119908 represents a unit vector towards thewind direction
119904 (119903) = 119891119890minus119903119897 minus 119890minus119903 (15)where119891 represents the intensity of attraction and 119897 representsthe attractive length scale
(2) Location Update Substituting 119878119894 119866119894 and 119860 119894 in (13) thespecific position of the 119894-th grasshopper is as follows
119883119894 = 119873sum119895=1119895 =119894
119904 (10038161003816100381610038161003816119909119895 minus 11990911989410038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 minus 119892119890119892 + 119906119890119908 (16)
Equation (16) shows that the grasshoppers move quicklyto the comfort zone at which point the swarm has not founda specified point Therefore the model needs to be improvedbefore solving optimization problems Actually the modelis considered in free space and the gravity need not beconsidered (no 119866119894 component) At the same time we assumethat thewind direction is the same as the target direction (119879119889)An improved version of (16) is as follows
119883119889119894 = 119888( 119873sum119895=1119895 =119894
119888119906119887119889 minus 1198971198871198892 119904 (10038161003816100381610038161003816119909119889119895 minus 119909119889119894 10038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 )+ 119879119889
(17)
where 119906119887119889 and 119897119887119889 are the upper and lower boundaries ofthe D-dimensional search space respectively 119879119889 representsthe optimal solution found so far in the target direction Theouter 119888 adjusts the exploration and exploitation of the swarmnear the target Inner 119888 reduces the interaction betweengrasshoppers as the iteration number increases
(3) Balance of Search Ability The parameter 119888 is used tobalance the exploration and exploitation of the swarmwhich decreases linearly with the increase of iteration Thismechanism reduces the comfort zone and thus enhances theexploitation ability
119888 = 119888max minus 119898119888max minus 119888min119872 (18)
where 119888max and 119888min are the upper and lower boundaries of119888 respectively and they take 1 and 000004 in this paper119898 represents the current iteration and 119872 represents themaximum number of iterations
3 Parameter Adaptive MOMEDA MethodBased on GOA
Kurtosis can characterize the distribution density of theimpact signal and it has been widely used in signal pro-cessing MKurt is based on kurtosis it not only inherits thecharacteristics of the kurtosis but also extends its definitionto multiple pulses at controlled locations [28 33] ThereforeMKurt can not only provide location information of fault butalso indicate the energy and period of the fault signal [29]Meanwhile a larger MKurt characterizes a larger proportionof the periodic impacts [33]
119872119870119906119903119905 = (sum119873minus119871119899=1 1199051198992)2sum119873minus119871119899=1 (119905119899119910119899)4
(sum119873minus119871119899=1 1199051198998 (sum119873minus119871119899=1 1199102119899)2) (19)
So we expect to get the maximum of MKurt and theparameters of MOMEDA when the maximum is reachedin this paper Since the intention of GOA is to search forthe minimum of the objective function [17] the opposite ofMKurt is used as the objective function in this paper
119891119894119905119899119890119904119904 = min120574=119871119879119894
minus119872119870119906119903119905119871 isin [1 500] 119879119894 isin [50 150] (20)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 3: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/3.jpg)
Mathematical Problems in Engineering 3
of optimization algorithms The results show that GOA hasoutstanding advantages in optimizing the unimodal functionmultimodal function and compound function Zhang et al[17] optimized the mode number and penalty factor of VMDby GOA which not only improved the performance of VMDbut also improved the effects of feature extraction Barman etal [39] optimized the kernel function and penalty factor ofsupport vector machine (SVM) by GOA and then used themodel to predict the power load in the local climate
To solve the parameter selection problem of MOMEDAa parameter adaptive MOMEDA method based on GOAis proposed which combines the advantages of GOA andMOMEDA effectively Firstly the algorithm parameters areinitialized according to the signal characteristics Then weoptimize MOMEDA parameters by GOA algorithm In eachiteration the impact component contained in the mixedsignal is extracted by MOMEDA and the opposite of theMKurt is served as the objective function to optimize thefilter parameters Finally the optimizedMOMEDA is used toextract the impact component from the signals and the faultfeature is extracted through Hilbert envelope demodulationIn order to prove the validity of the proposed approachthe method is used to analyze the simulation signal CaseWestern Reserve University (CWRU) bearing dataset [40]and National Aeronautics and Space Administration (NASA)bearing dataset [41] To highlight the advantages of GOAthe algorithm is compared with PSO SFLA and gray wolfoptimization algorithm (GWO) [42] and then the proposedapproach is compared with the MOMEDA methods withfixed parameters Finally the proposed approach is comparedwith the three methods MED MCKD FSK after parameteroptimization The structure of the paper is shown in Fig-ure 1(b)
Themain contents of the paper are as followsTheories ofMOMEDA and GOA are introduced briefly in Section 2Theprocess of optimizing MOMEDA filter parameters is intro-duced in Section 3 The validity of the proposed approachis verified by simulation signal in Section 4 In Section 5the validity and reliability of the approach are validatedby CWRU dataset and NASA dataset In Section 6 theexperimental process and preliminary conclusions are dis-cussed The conclusions of the experiment are summarizedin Section 7
2 A Brief Review of the Diagnostic Techniques
21 MOMEDA The response signal can be expressed asfollows [33 34 43]
119910 (119899) = ℎ (119899) lowast 119909 (119899) + 119890 (119899) (1)
where 119910(119899) is the vibration signal 119909(119899) is the impact compo-nent ℎ(119899) is the system frequency response function and 119890(119899)is the background noise In order to reconstruct the impactcomponent the deconvolution process is as follows
119909 (119899) = 119891 (119899) lowast 119910 (119899) = 119871sum119897=1
119891119897119910119896+119871minus1 (2)
In (2) 119896 = 1 2 sdot sdot sdot 119873 minus 119871 where 119873 represents thesignal length and 119871 represents the filter size In view of the
characteristics of the periodic impact signal the multipointD-norm is introduced in this method as shown below
119872119906119897119905119894 119863 minus 119873119900119903119898 = 119872119863119873(997888rarr119910 997888rarr119905 ) = 1100381710038171003817100381710038171003817997888rarr119905 100381710038171003817100381710038171003817997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (3)
119872119874119872119864119863119860 = max997888rarr119891
119872119863119873(997888rarr119910 997888rarr119905 ) = max997888rarr119891
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (4)
where997888rarr119905 represents a constant vector and it is used to describethe position andweight of the target impactTheoptimal filtercan be obtained by solving the maximum of multipoint D-norm and the deconvolution process also obtains the optimalsolution at this time In order to calculate the extreme valueof (4) we first calculate the derivative of the filter coefficients997888rarr119891 = (1198911 1198912 sdot sdot sdot 119891119871)
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 ) =119889119889997888rarr119891
1199051119910110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 +119889119889997888rarr119891
1199052119910210038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 + sdot sdot sdot+ 119889119889997888rarr119891
119905119873minus119871119910119873minus11987110038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 (5)
119889119889997888rarr119891
11990511989611991011989610038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 =10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 119905119896997888rarr119872119896 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 1199051198961199101198961198830997888rarr119910 (6)
997888rarr119872119896 = [119909119909+119871minus1 119909119909+119871minus2 sdot sdot sdot 119909119896]119879 (7)
Therefore (5) can be transformed into the following form
119889119889997888rarr119891 (
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817 )= 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus1 (1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871)minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910
(8)
The equation 1199051997888rarr1198721 + 1199052997888rarr1198722 + sdot sdot sdot 119905119873minus119871997888rarr119872119873minus119871 = 1198830997888rarr119905 isused to simplify the formula above and (5) is equivalent tothe following formula
10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus11198830997888rarr119905 minus 10038171003817100381710038171003817997888rarr11991010038171003817100381710038171003817minus3 997888rarr119905 119879997888rarr1199101198830997888rarr119910 = 997888rarr0 (9)
Then the equation (997888rarr119905 119879997888rarr119910997888rarr1199102)1198830997888rarr119910 = 1198830997888rarr119905 can beobtained Since 997888rarr119910 = 1198830119879997888rarr119891 assuming (11988301198830119879)minus1 exists thefollowing formula can be obtained
997888rarr119905 119879997888rarr11991010038171003817100381710038171003817997888rarr119910100381710038171003817100381710038172997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (10)
The special solution of (10) is a set of optimal filters andthe optimal filters can be expressed as follows
4 Mathematical Problems in Engineering
Calculate the fitness of each search agentT=the best search agentwhile (mltMax number of iterations M)
Update c using Eq (18) for each search agent
Normalize the distances between grasshoppers in [14]Update the position of the current search agent by Eq (17)Bring the current search agent back if it goes outside boundaries
end forUpdate T if there is a better solutionm=m+1
end whileReturn T
Initialize maximum number of iterations M cGR and cGCH
Initialize the swarm Xi(1 2 middot middot middot n)
(a) The implementation process of GOA
NormalInner ring
Outer ringRolling element
Parameter-adaptive MOMEDA method based on GOA
Comparison of feature extraction methods
FSK
MCK
DM
ED
Hilb
ert e
nvel
ope d
emod
ulat
ion
Parameters initialization
Optimized MOMEDA envelope
MKurt of MOMEDA filter signal
e optimization results of GOA
Comparison of envelope e optimized parameters
0 200 400 600 8000
0102030405
Filter size
Mku
rt
2 4 6 8 10
minus015
minus01
minus005
0
X 2Y -01816
The number of iterations
X 9Y -01825
0 200 400 600 8000
001
002
003
X 7031Y 001364
Frequency [Hz]
X 5684Y 001749X 4219
Y 001667X 2813Y 001086
X 1406Y 001952
0 002 004 006 008 01 012minus03
0
02
Time [s]
0 002 004 006 008 01 012minus004
0
004
Time [s]
0 002 004 006 008 01 012minus04
0
05
Time [s]
0 100 200 300 400 500 600 700 800 9000
3
0 100 200 300 400 500 600 700 800 9000
1
0 100 200 300 400 5000
1
0 100 200 300 400 500 600 700 800 9000
0025
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
1406
1496
1465
1465
MO
MED
A
frequency [Hz]0 1000 2000 3000 4000 5000 6000
01
162
263
364 0
02
04
06
08
Bear
ing
vibr
atio
n si
gnal
Bear
ing
vibr
atio
n si
gnal
fitness = minusMKurt= minus
(NminusL
sumn=1
tn2)2 (
NminusL
sumn=1
yn)4
(NminusL
sumn=1
tn8(
NminusL
sumn=1
y2 2n) )
tn
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
leve
l k
minus3times 10
minus3times 10
minus5times 10
(b) Parameter optimization process of MOMEDA
Figure 1 Parameter optimization process and the structure of the paper
Mathematical Problems in Engineering 5
997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (11)
1198830 =[[[[[[[[[[
119909119871 119909119871+1 119909119871+2 sdot sdot sdot 119909119873119909119871minus1 119909119871 119909119871+1 sdot sdot sdot 119909119873minus1119909119871minus2 119909119871minus1 119909119871 sdot sdot sdot 119909119873minus2 d
1199091 1199092 1199093 sdot sdot sdot 119909119873minus119871+1
]]]]]]]]]]119871 119887119910 119873minus119871+1
(12)
Then the original impact signal can be reconstructed bythe formula 997888rarr119910 = 1198830119879997888rarr119891 22 GOA GOA is a new bionic algorithm which simulatesthe foraging behavior of the grasshoppers [38] The behaviorof grasshoppers has the following characteristics the nymphsmove slowly and the step size of movement is small while theadults move fast in a wide range of parameter space There-fore the search mechanism of the GOA algorithm consists oftwo tendencies exploration and exploitation The algorithmoptimizes the objective function by judging the repulsionregion comfort zone and attraction region formed betweenthe grasshoppers GOA has the advantages of few parametersand high convergence accuracy The mathematical model ofGOA [38] is as follows
(1) The Initialization of the Population The grasshoppersrandom behavior can be represented by the following model
119883119894 = 119878119894 + 119866119894 + 119860 119894 (13)
119878119894 = 119873sum119895=1119895 =119894
119904 (119889119894119895) 119889119894119895119866119894 = minus119892119890119892119860 119894 = 119906119890119908
(14)
where 119883119894 represents the location of the 119894-th grasshopper119878119894 refers to the social interaction 119866119894 represents the gravityforce of the 119894-th grasshopper and 119860 119894 represents the windadvection In (14)119873 represents the number of grasshoppers119889119894119895 represents the distance between the 119894-th and the 119895-thindividual and 119889119894119895 = |119909119895 minus 119909119894| 119889119894119895 = (119909119895 minus 119909119894)119889119894119895 represents aunit vector The 119904 function is shown in (15) which representsthe social forces 119892 represents the gravitational constant and119890119892 represents a unit vector pointing to the earth 119906 is aconstant drift and 119890119908 represents a unit vector towards thewind direction
119904 (119903) = 119891119890minus119903119897 minus 119890minus119903 (15)where119891 represents the intensity of attraction and 119897 representsthe attractive length scale
(2) Location Update Substituting 119878119894 119866119894 and 119860 119894 in (13) thespecific position of the 119894-th grasshopper is as follows
119883119894 = 119873sum119895=1119895 =119894
119904 (10038161003816100381610038161003816119909119895 minus 11990911989410038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 minus 119892119890119892 + 119906119890119908 (16)
Equation (16) shows that the grasshoppers move quicklyto the comfort zone at which point the swarm has not founda specified point Therefore the model needs to be improvedbefore solving optimization problems Actually the modelis considered in free space and the gravity need not beconsidered (no 119866119894 component) At the same time we assumethat thewind direction is the same as the target direction (119879119889)An improved version of (16) is as follows
119883119889119894 = 119888( 119873sum119895=1119895 =119894
119888119906119887119889 minus 1198971198871198892 119904 (10038161003816100381610038161003816119909119889119895 minus 119909119889119894 10038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 )+ 119879119889
(17)
where 119906119887119889 and 119897119887119889 are the upper and lower boundaries ofthe D-dimensional search space respectively 119879119889 representsthe optimal solution found so far in the target direction Theouter 119888 adjusts the exploration and exploitation of the swarmnear the target Inner 119888 reduces the interaction betweengrasshoppers as the iteration number increases
(3) Balance of Search Ability The parameter 119888 is used tobalance the exploration and exploitation of the swarmwhich decreases linearly with the increase of iteration Thismechanism reduces the comfort zone and thus enhances theexploitation ability
119888 = 119888max minus 119898119888max minus 119888min119872 (18)
where 119888max and 119888min are the upper and lower boundaries of119888 respectively and they take 1 and 000004 in this paper119898 represents the current iteration and 119872 represents themaximum number of iterations
3 Parameter Adaptive MOMEDA MethodBased on GOA
Kurtosis can characterize the distribution density of theimpact signal and it has been widely used in signal pro-cessing MKurt is based on kurtosis it not only inherits thecharacteristics of the kurtosis but also extends its definitionto multiple pulses at controlled locations [28 33] ThereforeMKurt can not only provide location information of fault butalso indicate the energy and period of the fault signal [29]Meanwhile a larger MKurt characterizes a larger proportionof the periodic impacts [33]
119872119870119906119903119905 = (sum119873minus119871119899=1 1199051198992)2sum119873minus119871119899=1 (119905119899119910119899)4
(sum119873minus119871119899=1 1199051198998 (sum119873minus119871119899=1 1199102119899)2) (19)
So we expect to get the maximum of MKurt and theparameters of MOMEDA when the maximum is reachedin this paper Since the intention of GOA is to search forthe minimum of the objective function [17] the opposite ofMKurt is used as the objective function in this paper
119891119894119905119899119890119904119904 = min120574=119871119879119894
minus119872119870119906119903119905119871 isin [1 500] 119879119894 isin [50 150] (20)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 4: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/4.jpg)
4 Mathematical Problems in Engineering
Calculate the fitness of each search agentT=the best search agentwhile (mltMax number of iterations M)
Update c using Eq (18) for each search agent
Normalize the distances between grasshoppers in [14]Update the position of the current search agent by Eq (17)Bring the current search agent back if it goes outside boundaries
end forUpdate T if there is a better solutionm=m+1
end whileReturn T
Initialize maximum number of iterations M cGR and cGCH
Initialize the swarm Xi(1 2 middot middot middot n)
(a) The implementation process of GOA
NormalInner ring
Outer ringRolling element
Parameter-adaptive MOMEDA method based on GOA
Comparison of feature extraction methods
FSK
MCK
DM
ED
Hilb
ert e
nvel
ope d
emod
ulat
ion
Parameters initialization
Optimized MOMEDA envelope
MKurt of MOMEDA filter signal
e optimization results of GOA
Comparison of envelope e optimized parameters
0 200 400 600 8000
0102030405
Filter size
Mku
rt
2 4 6 8 10
minus015
minus01
minus005
0
X 2Y -01816
The number of iterations
X 9Y -01825
0 200 400 600 8000
001
002
003
X 7031Y 001364
Frequency [Hz]
X 5684Y 001749X 4219
Y 001667X 2813Y 001086
X 1406Y 001952
0 002 004 006 008 01 012minus03
0
02
Time [s]
0 002 004 006 008 01 012minus004
0
004
Time [s]
0 002 004 006 008 01 012minus04
0
05
Time [s]
0 100 200 300 400 500 600 700 800 9000
3
0 100 200 300 400 500 600 700 800 9000
1
0 100 200 300 400 5000
1
0 100 200 300 400 500 600 700 800 9000
0025
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
Frequency [Hz]
1406
1496
1465
1465
MO
MED
A
frequency [Hz]0 1000 2000 3000 4000 5000 6000
01
162
263
364 0
02
04
06
08
Bear
ing
vibr
atio
n si
gnal
Bear
ing
vibr
atio
n si
gnal
fitness = minusMKurt= minus
(NminusL
sumn=1
tn2)2 (
NminusL
sumn=1
yn)4
(NminusL
sumn=1
tn8(
NminusL
sumn=1
y2 2n) )
tn
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
Am
plitu
de[G
M2]
leve
l k
minus3times 10
minus3times 10
minus5times 10
(b) Parameter optimization process of MOMEDA
Figure 1 Parameter optimization process and the structure of the paper
Mathematical Problems in Engineering 5
997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (11)
1198830 =[[[[[[[[[[
119909119871 119909119871+1 119909119871+2 sdot sdot sdot 119909119873119909119871minus1 119909119871 119909119871+1 sdot sdot sdot 119909119873minus1119909119871minus2 119909119871minus1 119909119871 sdot sdot sdot 119909119873minus2 d
1199091 1199092 1199093 sdot sdot sdot 119909119873minus119871+1
]]]]]]]]]]119871 119887119910 119873minus119871+1
(12)
Then the original impact signal can be reconstructed bythe formula 997888rarr119910 = 1198830119879997888rarr119891 22 GOA GOA is a new bionic algorithm which simulatesthe foraging behavior of the grasshoppers [38] The behaviorof grasshoppers has the following characteristics the nymphsmove slowly and the step size of movement is small while theadults move fast in a wide range of parameter space There-fore the search mechanism of the GOA algorithm consists oftwo tendencies exploration and exploitation The algorithmoptimizes the objective function by judging the repulsionregion comfort zone and attraction region formed betweenthe grasshoppers GOA has the advantages of few parametersand high convergence accuracy The mathematical model ofGOA [38] is as follows
(1) The Initialization of the Population The grasshoppersrandom behavior can be represented by the following model
119883119894 = 119878119894 + 119866119894 + 119860 119894 (13)
119878119894 = 119873sum119895=1119895 =119894
119904 (119889119894119895) 119889119894119895119866119894 = minus119892119890119892119860 119894 = 119906119890119908
(14)
where 119883119894 represents the location of the 119894-th grasshopper119878119894 refers to the social interaction 119866119894 represents the gravityforce of the 119894-th grasshopper and 119860 119894 represents the windadvection In (14)119873 represents the number of grasshoppers119889119894119895 represents the distance between the 119894-th and the 119895-thindividual and 119889119894119895 = |119909119895 minus 119909119894| 119889119894119895 = (119909119895 minus 119909119894)119889119894119895 represents aunit vector The 119904 function is shown in (15) which representsthe social forces 119892 represents the gravitational constant and119890119892 represents a unit vector pointing to the earth 119906 is aconstant drift and 119890119908 represents a unit vector towards thewind direction
119904 (119903) = 119891119890minus119903119897 minus 119890minus119903 (15)where119891 represents the intensity of attraction and 119897 representsthe attractive length scale
(2) Location Update Substituting 119878119894 119866119894 and 119860 119894 in (13) thespecific position of the 119894-th grasshopper is as follows
119883119894 = 119873sum119895=1119895 =119894
119904 (10038161003816100381610038161003816119909119895 minus 11990911989410038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 minus 119892119890119892 + 119906119890119908 (16)
Equation (16) shows that the grasshoppers move quicklyto the comfort zone at which point the swarm has not founda specified point Therefore the model needs to be improvedbefore solving optimization problems Actually the modelis considered in free space and the gravity need not beconsidered (no 119866119894 component) At the same time we assumethat thewind direction is the same as the target direction (119879119889)An improved version of (16) is as follows
119883119889119894 = 119888( 119873sum119895=1119895 =119894
119888119906119887119889 minus 1198971198871198892 119904 (10038161003816100381610038161003816119909119889119895 minus 119909119889119894 10038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 )+ 119879119889
(17)
where 119906119887119889 and 119897119887119889 are the upper and lower boundaries ofthe D-dimensional search space respectively 119879119889 representsthe optimal solution found so far in the target direction Theouter 119888 adjusts the exploration and exploitation of the swarmnear the target Inner 119888 reduces the interaction betweengrasshoppers as the iteration number increases
(3) Balance of Search Ability The parameter 119888 is used tobalance the exploration and exploitation of the swarmwhich decreases linearly with the increase of iteration Thismechanism reduces the comfort zone and thus enhances theexploitation ability
119888 = 119888max minus 119898119888max minus 119888min119872 (18)
where 119888max and 119888min are the upper and lower boundaries of119888 respectively and they take 1 and 000004 in this paper119898 represents the current iteration and 119872 represents themaximum number of iterations
3 Parameter Adaptive MOMEDA MethodBased on GOA
Kurtosis can characterize the distribution density of theimpact signal and it has been widely used in signal pro-cessing MKurt is based on kurtosis it not only inherits thecharacteristics of the kurtosis but also extends its definitionto multiple pulses at controlled locations [28 33] ThereforeMKurt can not only provide location information of fault butalso indicate the energy and period of the fault signal [29]Meanwhile a larger MKurt characterizes a larger proportionof the periodic impacts [33]
119872119870119906119903119905 = (sum119873minus119871119899=1 1199051198992)2sum119873minus119871119899=1 (119905119899119910119899)4
(sum119873minus119871119899=1 1199051198998 (sum119873minus119871119899=1 1199102119899)2) (19)
So we expect to get the maximum of MKurt and theparameters of MOMEDA when the maximum is reachedin this paper Since the intention of GOA is to search forthe minimum of the objective function [17] the opposite ofMKurt is used as the objective function in this paper
119891119894119905119899119890119904119904 = min120574=119871119879119894
minus119872119870119906119903119905119871 isin [1 500] 119879119894 isin [50 150] (20)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 5: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/5.jpg)
Mathematical Problems in Engineering 5
997888rarr119891 = (11988301198830119879)minus11198830997888rarr119905 (11)
1198830 =[[[[[[[[[[
119909119871 119909119871+1 119909119871+2 sdot sdot sdot 119909119873119909119871minus1 119909119871 119909119871+1 sdot sdot sdot 119909119873minus1119909119871minus2 119909119871minus1 119909119871 sdot sdot sdot 119909119873minus2 d
1199091 1199092 1199093 sdot sdot sdot 119909119873minus119871+1
]]]]]]]]]]119871 119887119910 119873minus119871+1
(12)
Then the original impact signal can be reconstructed bythe formula 997888rarr119910 = 1198830119879997888rarr119891 22 GOA GOA is a new bionic algorithm which simulatesthe foraging behavior of the grasshoppers [38] The behaviorof grasshoppers has the following characteristics the nymphsmove slowly and the step size of movement is small while theadults move fast in a wide range of parameter space There-fore the search mechanism of the GOA algorithm consists oftwo tendencies exploration and exploitation The algorithmoptimizes the objective function by judging the repulsionregion comfort zone and attraction region formed betweenthe grasshoppers GOA has the advantages of few parametersand high convergence accuracy The mathematical model ofGOA [38] is as follows
(1) The Initialization of the Population The grasshoppersrandom behavior can be represented by the following model
119883119894 = 119878119894 + 119866119894 + 119860 119894 (13)
119878119894 = 119873sum119895=1119895 =119894
119904 (119889119894119895) 119889119894119895119866119894 = minus119892119890119892119860 119894 = 119906119890119908
(14)
where 119883119894 represents the location of the 119894-th grasshopper119878119894 refers to the social interaction 119866119894 represents the gravityforce of the 119894-th grasshopper and 119860 119894 represents the windadvection In (14)119873 represents the number of grasshoppers119889119894119895 represents the distance between the 119894-th and the 119895-thindividual and 119889119894119895 = |119909119895 minus 119909119894| 119889119894119895 = (119909119895 minus 119909119894)119889119894119895 represents aunit vector The 119904 function is shown in (15) which representsthe social forces 119892 represents the gravitational constant and119890119892 represents a unit vector pointing to the earth 119906 is aconstant drift and 119890119908 represents a unit vector towards thewind direction
119904 (119903) = 119891119890minus119903119897 minus 119890minus119903 (15)where119891 represents the intensity of attraction and 119897 representsthe attractive length scale
(2) Location Update Substituting 119878119894 119866119894 and 119860 119894 in (13) thespecific position of the 119894-th grasshopper is as follows
119883119894 = 119873sum119895=1119895 =119894
119904 (10038161003816100381610038161003816119909119895 minus 11990911989410038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 minus 119892119890119892 + 119906119890119908 (16)
Equation (16) shows that the grasshoppers move quicklyto the comfort zone at which point the swarm has not founda specified point Therefore the model needs to be improvedbefore solving optimization problems Actually the modelis considered in free space and the gravity need not beconsidered (no 119866119894 component) At the same time we assumethat thewind direction is the same as the target direction (119879119889)An improved version of (16) is as follows
119883119889119894 = 119888( 119873sum119895=1119895 =119894
119888119906119887119889 minus 1198971198871198892 119904 (10038161003816100381610038161003816119909119889119895 minus 119909119889119894 10038161003816100381610038161003816) 119909119895 minus 119909119894119889119894119895 )+ 119879119889
(17)
where 119906119887119889 and 119897119887119889 are the upper and lower boundaries ofthe D-dimensional search space respectively 119879119889 representsthe optimal solution found so far in the target direction Theouter 119888 adjusts the exploration and exploitation of the swarmnear the target Inner 119888 reduces the interaction betweengrasshoppers as the iteration number increases
(3) Balance of Search Ability The parameter 119888 is used tobalance the exploration and exploitation of the swarmwhich decreases linearly with the increase of iteration Thismechanism reduces the comfort zone and thus enhances theexploitation ability
119888 = 119888max minus 119898119888max minus 119888min119872 (18)
where 119888max and 119888min are the upper and lower boundaries of119888 respectively and they take 1 and 000004 in this paper119898 represents the current iteration and 119872 represents themaximum number of iterations
3 Parameter Adaptive MOMEDA MethodBased on GOA
Kurtosis can characterize the distribution density of theimpact signal and it has been widely used in signal pro-cessing MKurt is based on kurtosis it not only inherits thecharacteristics of the kurtosis but also extends its definitionto multiple pulses at controlled locations [28 33] ThereforeMKurt can not only provide location information of fault butalso indicate the energy and period of the fault signal [29]Meanwhile a larger MKurt characterizes a larger proportionof the periodic impacts [33]
119872119870119906119903119905 = (sum119873minus119871119899=1 1199051198992)2sum119873minus119871119899=1 (119905119899119910119899)4
(sum119873minus119871119899=1 1199051198998 (sum119873minus119871119899=1 1199102119899)2) (19)
So we expect to get the maximum of MKurt and theparameters of MOMEDA when the maximum is reachedin this paper Since the intention of GOA is to search forthe minimum of the objective function [17] the opposite ofMKurt is used as the objective function in this paper
119891119894119905119899119890119904119904 = min120574=119871119879119894
minus119872119870119906119903119905119871 isin [1 500] 119879119894 isin [50 150] (20)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 6: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/6.jpg)
6 Mathematical Problems in Engineering
where 119891119894119905119899119890119904119904 is the objective function and 120574 = (119871 119879119894) is aset of parameters that need to be optimized 119871 is a positiveinteger within range 119871 isin [1 500] and119879119894 takes a value in range119879119894 isin [50 150] The steps of the approach are as follows(1) Input the signal 119909(119905) and initialize the ranges ofthe MOMEDA parameters Meanwhile initialize the GOAparameters and grasshoppers swarm(2) Extract the periodic impact signal by usingMOMEDA and calculate the fitness of the impact signalSave the best fitness and corresponding position 119879119889 for eachiteration of GOA(3) If the current iteration119898 is less than themaximum119872the decreasing coefficient 119888 is updated by (18)(4) For each swarm normalize the distances betweenindividuals in [1 4] and update the location of the searchagent by (17)(5) If there is a better solution update the best fitnessand corresponding position 119879119889 Then determine if the stopcriterion is reached (119898 ge 119872) If yes the iteration isterminated Else let 119898 = 119898 + 1 and the iteration will becontinued(6)Obtain the best fitness and the corresponding param-eters of MOMEDA(7)Extract the periodic impact signal by usingMOMEDAwith the optimized parameters(8) Extract fault features from impact signal by usingHilbert envelope demodulation
4 Simulations and Comparisons
To verify the feasibility of the approach we analyzedthe bearing simulation signal [44] by using the proposedmethod Meanwhile all the experiments were completed byusing MATLAB R2014a under the environment of Intel(R)Core(TM) i5-5200U CPU 220GHz 219GHz 8GRAM
119909 (119905) = 1199100119890minus2120587119891119899120585119905 lowast sin(2120587119891119899 lowast radic1 minus 1205852119905) (21)
where the natural frequency 119891119899 = 3000119867119911 dampingcoefficient 120585 = 01 shift constant 1199100 = 25 impact period 119879 =000625119904 (characteristic frequency theoretical value 119891119888ℎ119905ℎ119890 =160119867z) data length 119873 = 4096 and sampling frequency119891119904 = 12119870119867119911 Moreover the 5 dB noise is mixed into theoriginal signal
The waveforms of the simulation signal and noisy signalsare given in Figure 2 In Figure 2(b) the frequency 119891119888ℎ119905ℎ119890 =160119867z and its harmonics are especially obvious In Figures2(c) and 2(d) the characteristic frequency of the noisysignal and harmonics are submerged by noise Although thenoisy signal is similar to the actual bearing fault signal thewaveforms of the noisy signal are more complex [44]
Then we analyze the noisy signal by the proposedapproach Here the search agents 119878119860119899 = 100 the maximumnumber of iterations 119872 = 10 and the ranges of filter sizeand the periodic initial value are 119871 isin [1 500] and 119879119894 isin[50 150] respectively As shown in Figure 3 along withthe increasing of iterations the grasshopper swarms tend toconverge towards the best locations and the convergent curve
gradually converges to the minimum When the number ofiterations 119898 = 9 the MKurt (119872119870119906119903119905 = 031328) reachesthe maximum and the optimal parameters 120574 = (119871 119879119894) =(386 7500464) of MOMEDA are obtainedThen the impactsignal in the noisy signal is extracted by the optimizedMOMEDA and the envelope of the impact component isgiven in Figure 4 The actual value of the characteristicfrequency 119891119888ℎ = 1611Hz is approximate to 119891119888ℎ119905ℎ119890 = 160119867zand its harmonics are particularly obvious Therefore theproposed approach is feasible in extracting the features fromthe noisy signal
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 5(a) and 5(b)when the filter size 119871 of MOMEDA is the optimal value 119871 =386 obtained by GOA and periodic initial value 119879119894 = 50the frequency 2402Hz and its harmonics can be observedclearly Meanwhile when 119879119894 = 90 the frequency 1348Hz andits harmonics are obvious However the frequency 2402 Hzis far greater than the theoretical value of the characteristicfrequency (119891119888ℎ119905ℎ119890 = 160119867z) and the frequency 1348 Hz isfar less than the theoretical value Therefore the improperselection of periodic initial value could lead to incorrectdiagnostic results As shown in Figures 5(c) and 5(d) when119879119894 of MOMEDA is set to the optimal value 119879119894 = 7500464 thefrequency 1582Hz and its harmonics can be observed clearlyand these frequencies are approximate to 119891119888ℎ119905ℎ119890 = 160119867z andits harmonics Meanwhile the spectral peaks of the envelopespectrum are more obvious when 119871 = 900
Figure 5 shows that the selection of filter size and periodicinitial value has a great impact on the feature extractionresults Therefore it is important to choose an effectiveoptimization method Next we discuss the optimization per-formance of PSO SFLA GWO and GOA For comparisonpurposes themaximumnumber of iterations and populationnumbers of all algorithms are set to 50 and 20 and the otherparameters are the default values The -6db noise is mixedinto the original signal and the waveforms of the noisy signalare shown in Figures 2(e) and 2(f)
As shown in Figure 6 and Table 1 the optimal fitness (-0075004) obtained by PSO is greater than that obtained byGOA when the number of iterations is 29 and the resultsshow that the optimization precision of PSO is not highMoreover the convergence speed of PSO is slow and thealgorithm is time-consuming The convergence speed of theSFLA is fast and the iterations take little time Howeverthe optimal fitness (-00746) obtained by SFLA is greaterthan that of other algorithms which indicates that theoptimization precision of the SFLA is lower than that ofother methods The GWO has high convergence accuracybut its convergence speed is very slow and the optimalfitness is obtained through 49 iterations Compared with theabove methods the convergence speed of GOA is very fastThe optimal parameters are obtained when the number ofiterations is 25 Moreover the optimal fitness obtained byGOA is minimal It can be concluded that GOA is not onlysimple in calculation but also high in convergent speed andaccuracy The GOA has outstanding advantages compared
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 7: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/7.jpg)
Mathematical Problems in Engineering 7
Original signal
005 01 015 02 025 030Time [s]
minus202
Am
plitu
de[G
M2]
(a)
Original signal
1611
200 400 600 800 10000Frequency [Hz]
0
002
004
Am
plitu
de[G
M2]
(b)
SNR= 5db
minus5
0
5
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(c)
SNR= 5db
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
SNR= -6db
minus10
0
10
Am
plitu
de[G
M2]
005 01 015 02 025 030Time [s]
(e)
SNR= -6db
0
005
01
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(f)
Figure 2 Noisy signals and their frequency domain
50
100
150
The p
erio
dic i
nitia
l val
ue T
i
100 200 300 400 5000Filter size L
(a) The search history of grasshoppers
0
X 9Y -03133
X 5Y -03122
minus03
minus02
minus01
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Convergence curve
(b) Convergence curve of GOA
Figure 3 Optimization results of MOMEDA
2fch 3fch 4fch 6fch 7fchfch 5fch
200 400 600 800 1000 12000Frequency [Hz]
0
002
004
006
008
Am
plitu
de[G
M2]
Figure 4 The envelope of the impact signal
with other optimization algorithms so we optimized theparameters of the MOMEDA by using GOA in this paper
To highlight the advantage of the approach the methodis compared with the methods with the optimal parameterssuch as MED MCKD and FSK Since the norms of MEDMCKD and MOMEDA are based on kurtosis the optimalfilter size 119871 = 386 obtained by GOA is used as the filtersize of MED and MCKD and the optimal periodic initialvalue 119879119894 = 7500464 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to30 Compared with the method in the literature [27] themethod has good adaptability According to the characteristicof the noisy signal the decomposition level of FSK is 4 In
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 8: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/8.jpg)
8 Mathematical Problems in Engineering
Table 1 The optimization results of algorithms
Index PSO SFLA GWO GOAFitness -0075004 -007468 -007616 -0076541Time (s) 3568335 2949474 3693333 3218644Convergence 29 27 49 25Best 119871 500 478 494 494Best 119879119894 750050 722673 747739 7499123
Filter size L=386 periodic initial value Ti=50
2402
0 400 600 800 1000200Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=386 periodic initial value Ti=901348
200 400 600 800 10000Frequency [Hz]
0
001
002
Am
plitu
de[G
M2]
(b)
0 200 400 600 800 1000
Filter size L=20 periodic initial value Ti=7500464
Frequency [Hz]
1582
0002004
Am
plitu
de[G
M2]
(c)
Filter size L=900 periodic initial value Ti=75004641582
200 400 600 800 10000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 5 The effect of nonoptimal parameters on the results
Figures 7(a) and 7(b) the characteristic frequencies obtainedby MED are submerged in irrelevant frequency componentsAlthough the frequency 1582Hz and its harmonics obtainedby MCKD can be observed these frequencies are ambiguousdue to the interference of irrelevant frequencies Similarlythe frequency 1592Hz and its harmonics can be obtained byFSK but many interference frequencies exist in the envelopespectrum From the comparison between Figures 4 and 7the proposed approach has an outstanding advantage in thefeature extraction of the noisy signal
5 Case Studies
51 Case 1 Vibration Signal Analysis of CWRU BearingsThe data are derived from CWRU bearing dataset [40]
minus008
minus006
minus004
minus002
0
Best
scor
e obt
aine
d so
far
10 20 30 40 500The number of iterations
PSOSFLA
GWOGOA
Figure 6 Convergence curves of optimization algorithms
The bearing test rig is given in Figure 8 [44] and it iscomposed of four parts a 2 hp motor a decoder or a torquesensor a dynamometer and a controller The sensors arefixed on the motor and the motor speed is 1797rpm (therotational frequency 119891119903 = 179760Hz = 2995Hz) the 6205-2RSJEMSKF bearing parameters are listed in Table 2 Thesampling frequency 119891119904 = 12119870119867119911 and the experimental datalength 119873 = 2048 We use the inner ring outer ring androlling element signals to prove the feasibility of the proposedapproach The fault diameter of these three bearing compo-nents is 0007 inches (001778 cm) Based on the parameterslisted in Table 2 and the formulas in literature [45] we cancalculate the corresponding characteristic frequencies andthey are listed in Table 3
511 Parameter Initialization The parameters of MOMEDAinclude filter size 119871 window function 119882119894119899119889119900119908 periodicinitial value 119879119894 and periodic final value 119879119891 Next we discussthe effect of different parameters on the MKurt of the filteredsignal The effect of window function on MKurt is notdiscussed in this paper and we use a rectangular window inall the tests [28]
The approximate range of MOMEDA parameters can bedetermined according to the signal characteristics Firstly theFIR filters with different filter size119871 are constructed the rangeof filter size is 119871 isin [1 800] and the period interval is119879 = [60 01 300] (119879119894 = 60 119879119891 = 300) Then the periodic impactsare extracted from the different fault signals by these filtersFinally theMKurt of these impact signals is obtained and theresults are shown in Figure 9
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 9: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/9.jpg)
Mathematical Problems in Engineering 9le
vel k
0
1
16
2
26
3
36
40
01
02
03
04
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=04 level 0 Bw= 6000Hz ==3000Hz
(a) Kurtogram analysis of the noisy signal
(A)
(B)
(C)
MED (Filter size L=386 iteration number=30)
200 400 600 800 10000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
MCKD (Filter size L=386 period T=7500464 iterations=30)
32231582
0
01
02
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=3000 Hz level=0)
32151592
0
002
004
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 7 Comparison of feature extraction methods for the noisysignal
The following conclusions can be drawn (1)The MKurtof the filtered signals increases with the increase of the filtersize 119871 However none of the four MKurt curves is strictlymonotone increasing function and the local feature of theseMKurt curves is irregular Therefore the filter with a largerfilter size is not necessarily the optimal filter (2)TheMKurt offiltered signals in different fault states is different ThereforeMKurt can characterize the characteristics of different faultsignals (3)When the range of filter size is 119871 le 500 the threehealth statuses of bearings can be effectively distinguished bycalculating the MKurt of the filtered signal If the filter size istoo large some information of the periodic impact signalmaybe removed and the length of the filtered signal (119873 minus 119871 + 1)becomes shorter In addition the deconvolution efficiencyof MOMEDA is reduced and the efficiency of parameter
Table 2 The SKF 6205 bearing parameters
Ball diameter(d)
Number ofballs (119873)
Pitchdiameter (D)
Contact angle(120572)
7938mm 9 39mm 0
Table 3 Characteristic frequencies
Inner ring Outer ring Rolling element1621852Hz 1073648Hz 1411693Hz
Motor Torque transducerEncoder Dynamometer
Figure 8 Bearing test rig
optimization is also reduced Therefore the range of filtersizes is 119871 isin [1 500] in this experiment
Then we analyze the effect of the periodic initial value 119879119894on theMKurt of the filtered signal Firstly the FIR filters withdifferent119879119894 are constructed the range of119879119894 is119879119894 isin [5 200] theperiodic final value is 119879119891 = 400 and the filter size is 119871 = 400Then the periodic impacts are extracted from the differentfault signals by these filters Finally theMKurt of these impactsignals is obtained and the results are shown in Figure 10
The following conclusions can be drawn (1) With theincrease of119879119894 the change ofMKurt is irregular (2)TheMKurtof the filtered signal is large when 119879119894 is small the reason isthat the high-frequency noise and high harmonics of the faultfrequencies are mixed into the filtered signal It can be seenthat a filter with a large 119879119894 can remove the high-frequencynoise Therefore the range of 119879119894 is 119879119894 isin [50 150] in thisexperiment
Then we analyze the effect of the periodic final value 119879119891on the MKurt of the filtered signal Firstly the FIR filterswith different 119879119891 are constructed the range of 119879119891 is 119879119891 isin[200 600] the periodic initial value is 119879119894 = 60 and the filtersize is 119871 = 400Then the periodic impacts are extracted fromthe different fault signals by these filters Finally the MKurtof these impact signals is obtained and the results are shownin Figure 11
The results show that the periodic final value 119879119891 does notaffect the filtering results Therefore the optimization of the119879119891 is not necessary and the final value119879119891 = 400 is used for allexperiments In summary the number of search agents 119878119860119899 =300 the maximum number of iterations119872 = 10 the range
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 10: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/10.jpg)
10 Mathematical Problems in Engineering
0
01
02
03
04
05
Mku
rt
NormalInner ring
Outer ringRolling element
100 200 300 400 500 600 700 8000Filter size
Figure 9 The relationship between MKurt and filter size
40 60 80 100 120 140 160 180 20020Periodic initial value Ti
0
02
04
06
08
Mku
rt
NormalInner ring
Outer ringRolling element
Figure 10 The relationship between MKurt and periodic initialvalue
of filter size 119871 isin [1 500] the range of periodic initial value119879119894 isin [50 150] and periodic final value 119879119891 = 400512 Inner Ring Signal Analysis of CWRU Bearings Asshown in Figure 12 the waveforms of the inner ring signalhave a certain regularity which indicates that the rollingbearing has failed [44] However background noise andinterference frequencies make it difficult to extract the innerring fault characteristics directly from the frequency domain[2] Therefore we extract the inner ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 13
As shown in Figure 13 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum Meanwhile a large number ofparticles are gathered at the right edge of Figure 13(a) andthe results indicate that the optimal target may exist outsidethe range of the parameters In order to ensure the efficiencyof the algorithm and the filtering effect we only considerthe optimal solution of the algorithm when the filter size isless than or equal to 500 When the number of iterations
NormalInner ring
Outer ringRolling element
250 300 350 400 450 500 550 600200Periodic final value Tf
008
009
01
011
012
013
Mku
rt
Figure 11The relationship betweenMKurt and periodic final value
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
01
02
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
minus2
0
2
Am
plitu
de[G
M2]
Figure 12 Inner ring signal and its frequency domain
119898 = 9 the MKurt (119872119870119906119903119905 = 02869) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (499 7415955)of MOMEDA are obtained
Subsequently the impact component in the inner ringsignal is extracted by the optimizedMOMEDA and the enve-lope of the impact signal is given in Figure 14 When the fre-quencies are 1641Hz and its multiples several spectral peakscan be observed clearly Moreover these peak frequencies areapproximate to the fault frequency (1621852Hz) of inner ringand its harmonics Due to the interference of transmissionpath and interference noise there are some slight deviationsbetween the measured values and the theoretical valuesHowever the proposed approach can effectively diagnose theinner ring fault
In order to explore the effect of nonoptimal parameterson the results we compared four sets of MOMEDAmethodswith fixed parameters As shown in Figures 15(a) and 15(b)when the filter size 119871 of MOMEDA is set to the optimalvalue 119871 = 499 obtained by GOA and 119879119894 = 50 thefrequency 2402Hz and its harmonics can be observed clearlyMeanwhile when 119879119894 = 90 the frequency 1348Hz and itsharmonics are obvious However the frequency 2402 Hzis far greater than the characteristic frequency (1621852Hz)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 11: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/11.jpg)
Mathematical Problems in Engineering 11
100 150 200 250 300 350 400 450 50050Filter size L
50
100
150
Perio
dic i
nitia
l val
ue T
i
(a) The search history of grasshoppers
X 9Y -02869
2 3 4 5 6 7 8 9 101The number of iterations
minus025
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 13 Optimization results of MOMEDA obtained by GOA
X 6445Y 002239
X 4863Y 002145
X 3223Y 003078
X 1641Y 004303
0
001
002
003
004
005
006
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
X 8086Y 001998
Figure 14 The envelope of the inner ring impact signal
of inner ring and 1348 Hz is far less than the frequencyTherefore the values of these two sets of parameters are notappropriate As shown in Figure 15(c) when 119879119894 of MOMEDAis set to the optimal value 119879119894 = 7415955 and 119871 = 20 thefrequency 1641Hz and its second harmonic can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its high-order harmonics are not obvious Therefore ifthe filter size 119871 of MOMEDA is too small the noise in thesignal cannot be removed effectively and the satisfactory
Filter size L=499 periodic initial value Ti=50
2402
200 400 600 800 10000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(a)
Filter size L=499 periodic initial value Ti=901348
0001002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=7415955
1641
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=7415955
16410
005
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
(d)
Figure 15 The effect of nonoptimal parameters on the results
effect cannot be obtained In Figure 15(d) the frequency1641Hz and its harmonics can be observed clearly when 119871 =900 and there is little interference around these harmonics Itcan be seen that a better filtering effect can be obtained whenthe filter size 119871 is larger However some information of theperiodic impact signal may be removed when 119871 is too largeand the optimization process is time-consuming We candraw a preliminary conclusion that the periodic initial valueaffects the size of the filtered signal characteristic frequencyand the filter size affects the noise reduction effect
To demonstrate the preponderance of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 499 obtained by GOA is used as thefilter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 7415955 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 As shown in Figure 16 the threemethods MED MCKD and FSK can extract the inner ringfault frequency and its harmonics However the envelopespectra obtained by these three methods are disturbed bythe irrelevant frequency components and their harmonicenvelopes are very blurredTherefore the proposed approach
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 12: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/12.jpg)
12 Mathematical Problems in Engineeringle
vel k
0
1
16
2
26
3 05
1
15
2
25
3
35
1000 2000 3000 4000 5000 60000frequency [Hz]
fb-kurt2 - +GR=38 level 25 Bw= 1000Hz ==1500Hz
(a) Kurtogram analysis of the inner signal
(A)
(C)
(B)
MED (Filter size L=499 iterations number=30)1641
0
001
002
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
00005
001
MCKD (Filter size L=499 period T=7415955 iterations=30)
1582
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
FSK (fc=1500 Hz level=25)1611
0
5
Am
plitu
de[G
M2]
200 400 600 800 10000Frequency [Hz]
minus4times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 16 Comparison of feature extraction methods for the innerring signal
has outstanding performance in the feature extraction of theinner ring
513 Outer Ring Signal Analysis of CWRU Bearings Asshown in Figure 17 the waveforms of the outer ring faultsignal have a certain regularity which indicates that therolling bearing has failed However background noise andirrelevant components make it difficult to extract the outerring fault characteristics directly from the frequency domain[2] Therefore we extract the outer ring fault features byusing the proposed approach Firstly the parameters of theMOMEDA are optimized by GOA algorithm and the resultsare shown in Figure 18
As shown in Figures 18(a) and 18(b) along with theincreasing of iteration times the grasshopper swarms tend to
minus4minus2
024
Am
plitu
de[G
M2]
002 004 006 008 01 012 014 0160Time [s]
1000 2000 3000 4000 5000 60000Frequency [Hz]
0
02
04
Am
plitu
de[G
M2]
Figure 17 Outer ring signal and its frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
X 4Y -051
X 7Y -0512
Average fitnessConvergence curve
minus05
minus04
minus03
minus02
minus01
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
(b) Average fitness curve and convergence curve of GOA
Figure 18 Optimization results of MOMEDA obtained by GOA
converge towards the best location and the convergent curvegradually converges to the minimum When the numberof iterations 119898 = 7 the MKurt (119872119870119906119903119905 = 05128) isthe maximum and the optimal parameters 120574 = (119871 119879119894) =(459 1114268) of MOMEDA are obtained
Then the impact component in the outer ring signal isextracted by the optimized MOMEDA and the envelope ofthe impact signal is given in Figure 19 When the frequenciesare 1055Hz and its multiples several spectral peaks can
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 13: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/13.jpg)
Mathematical Problems in Engineering 13
X 1055Y 00291
X 2168Y 002243
X 3223Y 002416
X 4336Y 001676 X 5391
Y 00155
100 200 300 400 500 600 7000Frequency [Hz]
0
001
002
003
004
005
Am
plitu
de[G
M2]
Figure 19 The envelope of the outer ring impact signal
be observed clearly Moreover these peak frequencies areapproximate to the characteristic frequency (1073648Hz)of outer ring and its harmonics Due to the influence ofinterference noise there are some slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault of the bearing
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 20(a) and 20(b) whenthe filter size 119871 of MOMEDA is set to the optimal value119871 = 459 obtained by GOA 119879119894 = 50 or 119879119894 = 90 thefrequencies 2402Hz 1348Hz and their harmonics can beobserved clearly However these frequencies are far greaterthan the characteristic frequency (1073648Hz) of outer ringand its harmonics Therefore the values of these two sets ofparameters are not appropriate As shown in Figure 20(c)when 119879119894 of MOMEDA is set to the optimal value 119879119894 =1114268 and 119871 = 20 the frequency 1055Hz can be observedclearlyHowever the envelope spectrum is disturbed by noiseand its harmonics are submerged by interference frequencycomponents Therefore the feature extraction method willfail when the filter size is too small In Figure 20(d) 1055Hzand its harmonics can be observed clearly when 119871 = 900 andthere is little interference frequency around these harmonicsIt can be seen that a better filtering effect can be obtainedwhen the filter size is larger However some informationof the periodic impact signal may be removed when 119871 istoo large and the optimization process is time-consumingMeanwhile the larger the periodic initial value the smallerthe characteristic frequency of the filtered signal obtained byMOMEDA
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 459 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 1114268 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristic of the outer ring signal thedecomposition level of FSK is set to 4 As shown in Figure 21the three methods MED MCKD and FSK can extract the
Filter size L=459 periodic initial value Ti=50
2402
100 200 300 400 500 600 7000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(a)
Filter size L=459 periodic initial value Ti=90
1348
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(b)
Filter size L=20 periodic initial value Ti=11142681055
024
Am
plitu
de[G
M2]
100 200 300 600500 7000 400Frequency [Hz]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=1114268
10550
005
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
(d)
Figure 20 The effect of nonoptimal parameters on the results
characteristic frequency of outer ring and its harmonicsHowever the envelope obtained by MED contains manyinterference frequencies For the outer ringMCKD FSK andthe proposed approach can achieve good results
514 Rolling Element Signal Analysis of CWRU BearingsAccording to the theory of Kumar et al [46] when the rollingelement fails the frequency spectrum contains the secondharmonic of the spin frequency The spin frequency of therolling element is generated by impacting the inner ring orouter ring In general the rolling element rotates once and itproduces two impactsTherefore the characteristic frequencyof the rolling element usually submerged in interferencefrequencies Ma et al [44] also proved that the proposeddemodulation approach can obtain good results in the featureextraction of the inner ring and outer ring but it has a pooreffect in the feature extraction of the rolling element
As shown in Figure 22 the regularity and periodicityof the waveforms are not obvious and the frequenciescontained in frequency domain waveform are more complexIn addition the interference frequencies and noise makeit difficult to extract fault features directly from frequencydomain Therefore we extract the fault features by using theproposed approach Firstly the parameters of MOMEDA areoptimized by GOA algorithm and the results are shown inFigure 23
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 14: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/14.jpg)
14 Mathematical Problems in Engineering
0
2
4
6
8
10
12fb-kurt2 - +GR=126 level 15 Bw= 2000Hz ==3000Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the outer ring signal
(A)
(C)
(B)
0001002
MED (Filter size L=459 iterations number=30)1055
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MCKD (Filter size L=459 period T=1114268 iterations=30)
1055
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
100 200 300 400 500 600 700
FSK (fc=3000 Hz level=15)
Frequency [Hz]
10770
0
1
2
Am
plitu
de[G
M2] minus3times 10
(b) The envelope analysis of impact signals obtained by MED MCKDand FSK
Figure 21 Comparison of feature extraction methods for the outerring signal
As shown in Figure 23 along with the increasing ofiteration times the grasshopper swarms tend to convergetowards the best location and the convergent curve graduallyconverges to the minimum When the number of iterations119898 = 9 the MKurt (119872119870119906119903119905 = 018179) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (494 855723)of MOMEDA are obtained Then the impact componentin the rolling element signal is extracted by the optimizedMOMEDA and the envelope of the impact signal is givenin Figure 24 When the frequencies are 1406Hz and itsmultiples several spectral peaks can be observed clearlyMoreover these peak frequencies are close to the charac-teristic frequency (1411693Hz) of rolling element and itsharmonics Due to the effect of interference noise there are
0
005
Am
plitu
de[G
M2]
1000 2000 3000 4000 5000 60000Frequency [Hz]
002 004 006 008 01 012 014 0160Time [s]
minus05
0
05
Am
plitu
de[G
M2]
Figure 22 Rolling element signal and frequency domain
50
100
150
Perio
dic i
nitia
l val
ue T
i
100 150 200 250 300 350 400 450 50050Filter size L
(a) The search history of grasshoppers
minus015
minus01
minus005
0
X 9Y -01818
X 2Y -01816
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Average fitnessConvergence curve
(b) Average fitness curve and convergence curve of GOA
Figure 23 Optimization results of MOMEDA obtained by GOA
some slight deviations between the measured values andthe theoretical values However the rolling element fault ofthe bearing can be identified accurately by the proposedapproach
To explore the impact of nonoptimal parameters on theresults we compared four sets of MOMEDA methods withfixed parameters As shown in Figures 25(a) and 25(b) whenthe filter size 119871 of MOMEDA is the optimal value 119871 = 494
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 15: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/15.jpg)
Mathematical Problems in Engineering 15
X 1406Y 002589
X 2813Y 001567
X 4219Y 002358 X 5684
Y 002129X 7031Y 001821
0
0005
001
0015
002
0025
003
Am
plitu
de[G
M2]
200 400 600 8000Frequency [Hz]
Figure 24 The envelope of the rolling element impact signal
Filter size L=494 periodic initial value Ti=50
2402
0001002
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
(a)
Filter size L=494 periodic initial value Ti=90
1348
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
(b)
Filter size L=20 periodic initial value Ti=855723
100 200 300 400 500 600 700 800 9000Frequency [Hz]
024
Am
plitu
de[G
M2]
minus3times 10
(c)
Filter size L=900 periodic initial value Ti=855723
1406
100 200 300 400 500 600 700 800 9000Frequency [Hz]
0
005
Am
plitu
de[G
M2]
(d)
Figure 25 The effect of nonoptimal parameters on the results
obtained by GOA and 119879119894 = 50 the frequency 2402Hz and itsharmonics can be observed clearly Meanwhile when 119879119894 =90 the frequency 1348Hz and its harmonics are obviousHowever these two frequencies and their harmonics areindependent of the fault characteristic frequency Thereforethe values of these two sets of parameters are not appropriateAs shown in Figure 25(c) when 119879119894 of MOMEDA is set tothe optimal value 119879119894 = 855723 and 119871 = 20 the effectivefrequency is submerged by the interference frequencies andthe fault features cannot be extracted So if the filter size
Table 4 The Rexnord ZA-2115 bearing parameters
Ball diameter(d)
Number ofballs (Z)
Pitchdiameter (D)
Contact angle(120572)
8407 mm 16 71501 mm 1517
is too small the noise in the signal cannot be effectivelyremoved and the feature extraction method will completelyfail In Figure 25(d) 1406Hz and its harmonics can beobserved clearly when 119871 = 900 To sum up the featureextraction method will fail when the periodic initial value119879119894 is not appropriate In general the larger 119879119894 the smallerthe characteristic frequency of the filtered signal The filtersize 119871 affects the noise reduction effect if 119871 is too small theinterference frequencies and noise in the signal cannot beremoved effectively
To demonstrate the superiority of the approach themethod is compared with the methods MED MCKD andFSK with the optimal parameters The optimal filter size119871 = 494 obtained by GOA is used as the filter size ofMED and MCKD and the optimal periodic initial value119879119894 = 855723 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30According to the characteristics of the rolling element signalthe decomposition level of FSK is set to 4 As shown inFigure 26 the envelope spectra obtained by MED MCKDand FSK all contain a large number of unrelated frequencycomponents and the effective frequencies are all submergedin the interference frequencies For the rolling element signalthe above three feature extraction methods cannot achievesatisfactory results Therefore it is particularly difficult toextract the rolling element characteristic frequency comparedwith the inner ring and outer ring However the proposedmethod still achieves good results in the feature extraction ofthe rolling element
52 Case 2 Vibration Signal Analysis of NASA BearingsTo verify the universality and reliability of the proposedapproach we analyze the NASA bearing dataset [41] by usingthe proposed approach Figure 27 shows the test platform[47] of NASA and four lubricated Rexnord ZA-2115 bearingsare fixed on the spindle of the test rig The spindle rotatesunder the drive of the motor and its speed is 2000 rpmTherefore the rotating frequency of the bearing is 3333 Hz(119891119903 = 200060 = 3333 Hz) The PCB353B33 accelerationsensors are fixed on the bearing housing and the signalsare collected by NI DAQ Card 6062E data acquisition cardThe data length N = 20480 and the sampling frequency119891119904 = 20KHz In this experiment the inner ring signal comesfrom Bearing 3 of No 1 dataset the outer ring signal comesfrom Bearing 1 of No 2 dataset the rolling element signalcomes from Bearing 3 of No 1 dataset and the data lengthis 2048 The parameters of Rexnord ZA-2115 bearing arelisted in Table 4 Based on the parameters listed in Table 4and the formulas in literature [45] we can calculate thecorresponding characteristic frequencies and they are listedin Table 5
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 16: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/16.jpg)
16 Mathematical Problems in Engineering
Table 5 Characteristic frequencies
Inner ring Outer ring Rolling element29691Hz 2364Hz 1399Hz
0
02
04
06
08
fb-kurt2 - +GR=08 level 35 Bw=500Hz ==1750Hz
1000 2000 3000 4000 5000 60000frequency [Hz]
4
36
3
26
2
16
1
0
leve
l k
(a) Kurtogram analysis of the rolling element signal
(A)
(C)
(B)
MED (Filter size L=494 iterations number=30)
1348
0123
Am
plitu
de[G
M2]
100 200 300 400 500 600 700 800 9000Frequency [Hz]
05
1MCKD( L=494 period T=855723 iterations=30)1465
Am
plitu
de[G
M2]
0 100 200 300 400 500 600 700 800 9000
Frequency [Hz]
FSK (fc=1750 Hz level=35)1496
0
05
1
Am
plitu
de[G
M2]
100 200 300 400 5000Frequency [Hz]
minus3times 10
minus3times 10
minus5times 10
(b) The envelope analysis of impact signals obtained byMED MCKDand FSK
Figure 26 Comparison of feature extractionmethods for the rollingelement signal
The structure and operation mode of bearings sharesome similarities and the bearings vibration signals havea corresponding periodicity Therefore the initialization ofparameters in this section is the same as that in Section 511
521 Inner Ring Signal Analysis of NASA Bearings As shownin Figure 28 due to the interference of interference frequen-cies and noise it is difficult to extract the inner ring fault
Accelerometers Radial load Thermocouples
Bearing 1 Bearing 2 Bearing 3 Bearing 4
Motor
Figure 27 Bearing experiment platform
2000 4000 6000 8000 100000Frequency [Hz]
0
005
01
Am
plitu
de[G
M2]
0 004 006 008 01002Time [s]
minus1
0
1
Am
plitu
de[G
M2]
Figure 28 Inner ring signal and its frequency domain
features Therefore we extract the inner ring fault features byusing the proposed method Firstly the MOMEDA parame-ters are optimized by GOA algorithm
As shown in Figure 29 along with the increasing ofiteration times the convergent curve gradually converges tothe minimum When the number of iterations 119898 = 3 theMKurt (119872119870119906119903119905 = 02168) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (498 677462) of MOMEDAare obtained Then the impact component in the innerring signal is extracted by the optimized MOMEDA andthe envelope of the impact signal is given in Figure 30(d)When the frequencies are 293 Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the characteristic frequency(29691Hz) of inner ring and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the inner ring fault of the bearing
To demonstrate the superiority of the approach themethod is compared with the methods with the optimalparameters such as MED MCKD and FSK Since the normsof MED MCKD and MOMEDA are based on kurtosis theoptimal filter size 119871 = 498 obtained by GOA is used as the
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 17: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/17.jpg)
Mathematical Problems in Engineering 17
X 3Y -02168
Average fitnessConvergence curve
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 29 Optimization results of MOMEDA obtained by GOA
(a)
(b)
(c)
(d)
MED (Filter size L=498 the number of iterations=30)
500 1000 15000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD ( L=498 period T=677462 iterations=30)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
FSK (fc=8750Hz level=2)
0
1
2
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
MOMEDA ( L=498 periodic initial value Ti=677462)
293
0001002
Am
plitu
de[G
M2]
500 1000 15000Frequency [Hz]
minus3times 10
Figure 30 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
filter size ofMEDandMCKD and the optimal periodic initialvalue 119879119894 = 677462 is taken as the period of MCKD Thenumber of iterations of MED and MCKD is both set to 30In view of the characteristic of the signal the decompositionlevel of FSK is set to 3 The kurtosis of the filtered signalobtained by FSK is maximum when the decomposition levelis 2 At this point the central frequency of the filtered signal
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
005
01
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 31 Outer ring signal and its frequency domain
X 2Y -02333 X 9
Y -02385
Average fitnessConvergence curve
2 3 4 5 6 7 8 9 101The number of iterations
minus02
minus015
minus01
minus005
0
Best
scor
e obt
aine
d so
far
Figure 32 Optimization results of MOMEDA obtained by GOA
is 8750Hz the bandwidth is 2500Hz and the envelope of thefiltered signal is given in Figure 30(c) As shown in Figures30(a) and 30(c) the envelope spectra obtained by MED andFSK are disturbed by many irrelevant frequencies and itis unrealistic to extract the fault characteristic frequencyIn Figure 30(b) although MCKD can extract the innerring fault features the frequency and its harmonics aredisturbed by many irrelevant frequencies Therefore theproposed approach has outstanding advantages in the featureextraction of the inner ring
522 Outer Ring Signal Analysis of NASA Bearings Asshown in Figure 31 although the waveforms have a certainregularity it is difficult to extract fault features directly fromthe frequency domain Therefore we extract the outer ringfault features by using the proposed method Firstly theparameters of MOMEDA are optimized by GOA algorithmand the results are shown in Figure 32
When the number of iterations 119898 = 9 the MKurt(119872119896119906119903119905 = 02385) is the maximum and the optimalparameters 120574 = (119871 119879119894) = (496 847148) of MOMEDAare obtained Then the impact component in the outer ring
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 18: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/18.jpg)
18 Mathematical Problems in Engineering
(a)
(b)
(c)
(d)
MED (Filter size L=496 the number of iterations=30)
2344
00005
001
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
0 200 400 600 800 1000 1200
MCKD (Filter size L=496 period T=847148 iterations=30)
Frequency [Hz]
2344
00005
001
Am
plitu
de[G
M2]
FSK (fc=1666666Hz level=15)
2344
0
1
2
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
MOMEDA ( L=496 periodic initial value Ti=847148)
2344
0001002
Am
plitu
de[G
M2]
200 400 600 800 1000 12000Frequency [Hz]
Figure 33 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
signal is extracted by the optimized MOMEDA and theenvelope of the impact component is given in Figure 33(d)When the frequencies are 2344Hz and its multiples severalspectral peaks can be observed clearly Moreover these peakfrequencies are approximate to the outer ring characteristicfrequency (2364Hz) and its harmonics Due to the interfer-ence of interference noise there are slight deviations betweenthe measured values and the theoretical values However theproposed approach can effectively diagnose the outer ringfault
Then we compared the proposed approach with themethods MED MCKD and FSK with the optimal param-eters The optimal filter size 119871 = 496 obtained by GOA isused as the filter size of MED and MCKD and the optimalperiodic initial value 119879119894 = 847148 is taken as the periodof MCKD The number of iterations of MED and MCKD isboth set to 30 and the decomposition level of the FSK is setto 3 The kurtosis of the filtered signal obtained by FSK ismaximum when the decomposition level is 15 At this pointthe central frequency of the filtered signal is 1666666Hzthe bandwidth is 333333Hz and the envelope analysis ofthe filtered signal is shown in Figure 33(c) In Figures 33(a)and 33(c) the characteristic frequencies and their harmonicscan be observed However these frequencies are disturbedby many interference frequencies Therefore it is difficult to
minus05
0
05
Am
plitu
de[G
M2]
002 004 006 008 010Time [s]
0
002
004
Am
plitu
de[G
M2]
2000 4000 6000 8000 100000Frequency [Hz]
Figure 34 Rolling element signal and its frequency domain
minus015
minus01
minus005
0
X 2Y -01968
Average fitnessConvergence curve
Best
scor
e obt
aine
d so
far
2 3 4 5 6 7 8 9 101The number of iterations
Figure 35 Optimization results of MOMEDA obtained by GOA
identify the outer ring characteristic frequency throughMEDand FSK In Figure 33(b) although MCKD can extract theouter ring characteristic frequency and its harmonics theamplitudes of these harmonics are small and the spectralpeaks are not obvious Therefore the proposed approachhas outstanding performance in the feature extraction of theouter ring
523 Rolling Element Signal Analysis of NASA Bearings Asshown in Figure 34 the regularity of the waveforms is notsignificant and the frequencies contained in the frequencydomain waveform are more complex In addition the inter-ference frequencies and noise make it difficult to extractfault features directly from frequency domain Thereforewe extract the fault features by the proposed approachFirstly the parameters of MOMEDA are optimized by GOAalgorithm and the results are shown in Figure 35
As shown in Figure 35 when the number of iterations119898 = 2 the MKurt (119872119896119906119903119905 = 019684) is the maximumand the optimal parameters 120574 = (119871 119879119894) = (500 1430353)of MOMEDA are obtained Then the impact componentis extracted by the optimized MOMEDA and the envelope
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 19: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/19.jpg)
Mathematical Problems in Engineering 19
(d)
(c)
(b)
(a)
MED (Filter size L=500 the number of iterations=30)
100 200 300 400 500 600 7000Frequency [Hz]
0001002
Am
plitu
de[G
M2]
MCKD (Filter size L=500 period T=1430353 iterations=30)1465
0
001
002
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
FSK (fc=5000Hz level=0)
012
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
MOMEDA ( L=500 periodic initial value Ti=1430353)
1367
00005
001
Am
plitu
de[G
M2]
100 200 300 400 500 600 7000Frequency [Hz]
minus3times 10
Figure 36 The envelope analysis of impact signals obtained byMED MCKD FSK and MOMEDA
of the impact signal is given in Figure 36(d) When thefrequencies are 1367Hz and its multiples several spectralpeaks can be observed clearly Moreover these peak fre-quencies are approximate to the characteristic frequency(1399Hz) of rolling element and its harmonics Due to theinterference of background noise and transmission paththere are some slight deviations between themeasured valuesand the theoretical values However the proposed approachcan effectively diagnose the rolling element fault
Then the proposed method is compared with the meth-ods MED MCKD and FSK with the optimal parametersThe optimal filter size 119871 = 500 obtained by GOA is usedas the filter size of MED and MCKD and the optimalperiod initial value 119879119894 = 1430353 is taken as the periodof MCKD The number of iterations of MED and MCKDis both set to 30 and the decomposition level of FSK isset to 3 The kurtosis of the filtered signal obtained byFSK is maximum when the decomposition level is 0 Atthis point the central frequency of the filtered signal is5000Hz the bandwidth is 10000Hz and the envelope ofthe filtered signal is given in Figure 36(c) As shown inFigures 36(a) and 36(c) the envelope spectra obtained byMED and FSK are disturbed by many irrelevant frequenciesand it is difficult to extract the rolling element characteristic
frequency through MED and FSK In Figure 36(b) althoughMCKD can extract the characteristic frequency the deviationbetween the peak frequency (1465Hz) and fault character-istic frequency (1367Hz) is large Therefore the proposedapproach has excellent performance in the feature extractionof the rolling element
6 Discussions
Through the comparison and analysis of several sets ofexperiments the effectiveness and significant advantages ofthe proposed method are proved The experimental processand preliminary conclusions of this paper are discussedbelow(1) It can be seen from the analysis of the simulationsignal thatMEDMCKD andFSK cannot achieve satisfactoryresults in noisy environments However the characteristicfrequencies contained in the noisy signal can be extractedeffectively by the proposed approach By analyzing the bear-ing signals come from two different experimental platformsthe results show that the fault features of the inner ringand outer ring are obvious and the fault features are easyto be extracted The rolling element with local damageperiodically hits the inner ring and outer ring which leadsto the coupling effect between the inner and outer ring [44]In addition the rolling element vibration signal is affected bybackground noise and interference components Thereforethe feature extraction of the rolling element is difficult andthe characteristic frequency is not obvious Nevertheless theproposed method still achieves the desired effect and thevalidity and reliability of the method are verified(2) It is known from the parameter initialization thatthe filter size is positively correlated with the MKurt ofthe filtered signal but the MKurt curve is not a strictlymonotone increasing curveTherefore there is a local optimalsolution for the filter size In addition the change of MKurtis irregular when the periodic initial value changes so theparameter optimization is very difficult It is known from theexperiments with fixed parameters that a large amount ofnoise and interference is removed when the filter size is largeand the envelope spectra are clear However the efficiencyof the algorithm is very low when the filter size is too largeand the fault impact signal may be removed The largerthe periodic initial value is the smaller the characteristicfrequency extracted from the filtered signal is Comparisonexperiments of optimization algorithms show that GOAmethod is not only simple in calculation but also highin convergent speed and accuracy From the optimizationprocess of GOA it is known that the grasshoppers are widelydistributed in the whole search space at the beginning ofiteration which ensures the global search scope At theend of iteration the grasshopper swarm approaches theoptimal position and moves slowly which ensures the localsearch accuracy Therefore the GOA algorithm guaranteesthe reliability of parameter optimization(3) The optimal parameters of MOMEDA obtained byGOA are used in MED and MCKD because these threedeconvolution methods are all based on kurtosis norm Theexperimental results demonstrate that MED is only suitable
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 20: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/20.jpg)
20 Mathematical Problems in Engineering
for single impact signal Meanwhile the envelope spectrumobtained by MED contains a large number of interferencefrequencies Although MCKD can extract a series of impactcomponents from the noisy signal the higher harmonicsobtained by this method are often disturbed by irrelevantfrequencies In the process of processing the weak noisesignal FSK can achieve satisfactory results However whenthe signal contains strong background noise or interferencefrequencies it is sometimes difficult to extract fault featuresthrough FSK Therefore for the above three methods signalpreprocessing is necessary before feature extraction Allsignals have not been preprocessed in this paper and theproposed method still achieves satisfactory results
7 Conclusions
A parameter adaptive MOMEDA feature extraction methodbased on GOA is proposed for solving the problem of thebearing fault diagnosis The GOA is introduced to determinethe optimal parameters of MOMEDA The algorithm hasits own unique advantages and it updates the position ofindividual search agent by involving all search agents Inaddition GOA can adaptively determine the optimal filtersize and periodic initial value of MOMEDA based on thesignal characteristics and effectively avoid the randomness ofartificial adoption The simulation signal and bearing signalsfrom two different experimental platforms are analyzed bythe proposed method satisfactory feature extraction resultscan be obtained and the validity and reliability of themethodare verified Therefore several meaningful contributions ofthis paper are as follows (a) themain parameters affecting thefiltering results and feature extraction results are evaluated(b) a new optimization model containing these influenceparameters is constructed (c) GOA is introduced to deter-mine the appropriateMOMEDAparameters while extractingfault features Through several case studies some beneficialconclusions are gained
(a) The effect of feature extraction is affected by the filtersize and the periodic initial value and the influences of thesetwo parameters on the results are different Therefore theseinfluencing factors must be considered comprehensively inthe process of parameter optimization
(b) The feature extraction effect of the proposed methodis compared with that of MOMEDA with fixed parametersThe results show that the filter size affects the noise reductioneffect and the periodic initial value affects the size of thecharacteristic frequency
(c) The proposed approach is compared with the threemethods MED MCKD and FSK with optimal parametersWe found that the feature extraction effect of the proposedapproach is better than that of the other three methods in allcases and it meets the requirement of feature extraction forall fault types
However the damage problem of the bearing is com-plicated in the actual industrial production process thefault impact signals are often submerged by noises and thecomposite fault may occur Therefore we will collect bearingdata from the industrial environment and analyze these databy the approach In addition the composite fault experiment
and its analysis will be implemented step by step and theproposedmethod is expected to address these complex issues
Abbreviations
MED Minimum entropy deconvolutionMCKD Maximum correlated kurtosis
deconvolutionFSK Fast spectral kurtosisGOA Grasshopper optimization algorithmMOMEDA Multipoint optimal minimum entropy
deconvolution adjustedMKurt Multipoint kurtosisEMD Empirical mode decompositionEEMD Ensemble empirical mode decompositionCEEMDAN Complete ensemble empirical mode
decomposition adaptive noisePE Permutation entropyLMD Local mean decompositionELMD Ensemble local mean decompositionCELMD Complete ensemble local mean
decompositionVMD Variational mode decompositionEWT Empirical wavelet transformCA Cyclostationary analysisSR Stochastic resonanceTEO Teager energy operatorCPF Combined product functionPF Product functionsCK Correlation kurtosisPSO Particle swarm optimizationSFLA Shuffled frog leaping algorithmBA Bat algorithmFPA Flower pollination algorithmCS Cuckoo search algorithmSVM Support vector machineCWRU Case Western Reserve UniversityNASA National Aeronautics and Space
AdministrationGWO Gray wolf optimization algorithm
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (nos 61663017 and 51765022) Theauthors sincerely thank the team for their guidance andthank the Case West Reserve University and the Universityof Cincinnati for their bearing datasets
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 21: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/21.jpg)
Mathematical Problems in Engineering 21
References
[1] H Yuan J Chen and G Dong ldquoBearing Fault DiagnosisBased on Improved Locality-Constrained Linear Coding andAdaptive PSO-Optimized SVMrdquo Mathematical Problems inEngineering vol 2017 Article ID 7257603 16 pages 2017
[2] J Ma J Wu Y Fan and X Wang ldquoThe rolling bearing faultfeature extraction based on the lmd and envelope demodula-tionrdquo Mathematical Problems in Engineering vol 2015 ArticleID 429185 13 pages 2015
[3] M R Shahriar P Borghesani R B Randall and A C CTan ldquoAn assessment of envelope-based demodulation in case ofproximity of carrier and modulation frequenciesrdquo MechanicalSystems and Signal Processing vol 96 pp 176ndash200 2017
[4] N E Huang Z Shen and S R Long ldquoThe empirical modedecomposition and the Hilbert spectrum for nonlinear andnon-stationary time series analysisrdquo Proceedings MathematicalPhysical ampamp Engineering Sciences vol 454 no 1971 pp 903ndash995 1998
[5] Z H Wu and N E Huang ldquoEnsemble empirical mode decom-position a noise-assisted data analysis methodrdquo Advances inAdaptive Data Analysis (AADA) vol 1 no 1 pp 1ndash41 2009
[6] J Helske and P Luukko ldquoEnsemble empirical mode decompo-sition (EEMD) and its completevariant (CEEMDAN)rdquo Interna-tional Journal of Public Health vol 60 no 5 pp 1ndash9 2016
[7] S Zhou S Qian W Chang Y Xiao and Y Cheng ldquoA NovelBearing Multi-Fault Diagnosis Approach Based on WeightedPermutation Entropy and an Improved SVM Ensemble Clas-sifierrdquo Sensors vol 18 no 6 p 1934 2018
[8] Y Lv R Yuan TWang H Li andG Song ldquoHealth degradationmonitoring and early fault diagnosis of a rolling bearing basedon CEEMDAN and improved MMSErdquoMaterials vol 11 no 6Article ID ma11061009 2018
[9] J S Smith ldquoThe local mean decomposition and its applicationto EEG perception datardquo Journal of the Royal Society Interfacevol 2 no 5 pp 443ndash454 2005
[10] J Cheng ldquoEnsemble local mean decomposition method basedon noise-assisted analysisrdquo Journal of Mechanical Engineeringvol 47 no 03 pp 55ndash62 2011
[11] L Wang Z Liu Q Miao and X Zhang ldquoComplete ensemblelocal mean decomposition with adaptive noise and its applica-tion to fault diagnosis for rolling bearingsrdquoMechanical Systemsand Signal Processing vol 106 pp 24ndash39 2018
[12] L Zhang Z Wang and L Quan ldquoResearch on weak faultextraction method for alleviating the mode mixing of LMDrdquoEntropy vol 20 no 5 Article ID e20050387 2018
[13] L Wang Z Liu Q Miao and X Zhang ldquoTimendashfrequencyanalysis based on ensemble local mean decomposition and fastkurtogram for rotating machinery fault diagnosisrdquo MechanicalSystems and Signal Processing vol 103 pp 60ndash75 2018
[14] K Dragomiretskiy and D Zosso ldquoVariational mode decompo-sitionrdquo IEEE Transactions on Signal Processing vol 62 no 3 pp531ndash544 2014
[15] J Gilles ldquoEmpirical wavelet transformrdquo IEEE Transactions onSignal Processing vol 61 no 16 pp 3999ndash4010 2013
[16] Z Wang J Wang and W Du ldquoResearch on Fault Diagnosisof Gearbox with Improved Variational Mode DecompositionrdquoSensors vol 18 no 10 Article ID s18103510 2018
[17] X Zhang Q Miao H Zhang and L Wang ldquoA parameter-adaptive VMD method based on grasshopper optimization
algorithm to analyze vibration signals from rotating machin-eryrdquoMechanical Systems and Signal Processing vol 108 pp 58ndash72 2018
[18] D Wang Y Zhao C Yi K-L Tsui and J Lin ldquoSparsityguided empirical wavelet transform for fault diagnosis of rollingelement bearingsrdquo Mechanical Systems and Signal Processingvol 101 pp 292ndash308 2018
[19] Z Luo T Liu S Yan and M Qian ldquoRevised empiricalwavelet transform based on auto-regressive power spectrumand its application to the mode decomposition of deployablestructurerdquo Journal of Sound Vibration vol 431 pp 70ndash87 2018
[20] J Antoni ldquoFast computation of the kurtogram for the detectionof transient faultsrdquo Mechanical Systems and Signal Processingvol 21 no 1 pp 108ndash124 2007
[21] S Li N Chu and P Yan ldquoCyclostationary approach to detectflow-induced effects on vibration signals from centrifugalpumpsrdquoMechanical Systems Signal Processing vol 114 pp 275ndash289 2019
[22] J Li J Zhang andM Li ldquoA novel adaptive stochastic resonancemethod based on coupled bistable systems and its applicationin rolling bearing fault diagnosisrdquo Mechanical Systems SignalProcessing vol 114 pp 128ndash145 2019
[23] H Endo and R B Randall ldquoEnhancement of auto regressivemodel based gear tooth fault detection technique by the useof minimum entropy deconvolution filterrdquo Mechanical SystemsSignal Processing vol 21 no 2 pp 906ndash919 2007
[24] J Li M Li and J Zhang ldquoRolling bearing fault diagnosis basedon time-delayed feedbackmonostable stochastic resonance andadaptive minimum entropy deconvolutionrdquo Journal of Soundand Vibration vol 401 pp 139ndash151 2017
[25] D Abboud M Elbadaoui andW A Smith ldquoAdvanced bearingdiagnostics A comparative study of two powerful approachesrdquoMechanical Systems and Signal Processing vol 114 pp 604ndash6272019
[26] G L McDonald Q Zhao andM J Zuo ldquoMaximum correlatedKurtosis deconvolution and application on gear tooth chip faultdetectionrdquoMechanical Systems and Signal Processing vol 33 pp237ndash255 2012
[27] S Wan X Zhang and L Dou ldquoCompound fault diagnosisof bearings using an improved spectral kurtosis by MCDKrdquoMathematical Problems in Engineering vol 2018 Article ID6513045 12 pages 2018
[28] G L McDonald and Q Zhao ldquoMultipoint optimal minimumentropy deconvolution and convolution fix Application tovibration fault detectionrdquo Mechanical Systems and Signal Pro-cessing vol 82 pp 461ndash477 2017
[29] W Cai Z Yang Z Wang and Y Wang ldquoA new compoundfault feature extraction method based on multipoint kurtosisand variational mode decompositionrdquo Entropy vol 20 no 7Article ID e20070521 2018
[30] Z Wang J Wang Z Zhao W Wu J Zhang and Y KouldquoComposite fault feature extraction of gear box based onMKurt-MOMEDArdquo Journal of Vibration Measurement andDiagnosis vol 37 no 4 pp 830ndash834 2017 (Maltese)
[31] X Zhu and Y Wang ldquoFault diagnosis of rolling bearings basedon the MOMEDA and Teager energy operatorrdquo Journal ofVibration Shock vol 37 no 6 pp 104ndash110 2018
[32] Y Wang N Hu L Hu and Z Cheng ldquoRolling bearingfault diagnosis based on multipoint optimal minimum entropydeconvolution adjusted technique and direct spectral analysisrdquoin Proceedings of the 8th IEEE Prognostics and System HealthManagement Conference PHM-Harbin 2017 China July 2017
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 22: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/22.jpg)
22 Mathematical Problems in Engineering
[33] Z Wang J Wang Z Zhao and R Wang ldquoA novel methodfor multi-fault feature extraction of a gearbox under strongbackground noiserdquo Entropy vol 20 no 1 Article ID e200100102018
[34] W Cai and Z Wang ldquoApplication of an improved multipointoptimal minimum entropy deconvolution adjusted for gearboxcomposite fault diagnosisrdquo Sensors vol 18 no 9 Article IDs18092861 2018
[35] Y Cheng N Zhou andW Zhang ldquoApplication of an improvedminimum entropy deconvolution method for railway rollingelement bearing fault diagnosisrdquo Journal of SoundVibration vol425 pp 53ndash69 2018
[36] J Li J Jiang X Fan et al ldquoA new method for weak fault featureextraction based on improved MEDrdquo Shock and Vibration vol2018 Article ID 9432394 11 pages 2018
[37] YMiaoM Zhao J Lin and Y Lei ldquoApplication of an improvedmaximum correlated kurtosis deconvolution method for faultdiagnosis of rolling element bearingsrdquoMechanical Systems andSignal Processing vol 92 pp 173ndash195 2017
[38] S Saremi S Mirjalili and A Lewis ldquoGrasshopper optimisationalgorithm theory and applicationrdquo Advances in EngineeringSoftware vol 105 pp 30ndash47 2017
[39] M Barman N B DevChoudhury and S Sutradhar ldquoA regionalhybrid GOA-SVM model based on similar day approach forshort-term load forecasting in Assam Indiardquo Energy vol 145pp 710ndash720 2018
[40] K Loparo Bearings Vibration Data Set Case Western ReserveUniversity 2003 httpcsegroupscaseedubearingdatacenterpagesdownload-data-file
[41] J Lee H Qiu and G Yu Rexnord technical services ImsUniversity of cincinnati ldquoBearing data setrdquo NASA Amesprognostics data repository Moffett Field CA NASA AmesResearchCenter 2007 httptiarcnasagovprojectprognostic-data-repository
[42] S Mirjalili S M Mirjalili and A Lewis ldquoGrey wolf optimizerrdquoAdvances in Engineering Software vol 69 pp 46ndash61 2014
[43] H SunCWuX Liang andQZeng ldquoIdentification ofmultiplefaults in gearbox based on multipoint optional minimumentropy deconvolution adjusted and permutation entropyrdquoEntropy vol 20 no 11 Article ID e20110850 2018
[44] J Ma J Wu and X Wang ldquoIncipient fault feature extractionof rolling bearings based on the MVMD and Teager energyoperatorrdquo ISA Transactions vol 80 pp 297ndash311 2018
[45] Y Song S Zeng J Ma and J Guo ldquoA fault diagnosismethod for roller bearing based on empirical wavelet transformdecomposition with adaptive empirical mode segmentationrdquoMeasurement vol 117 pp 266ndash276 2018
[46] K Kumar S Shukla and S K Singh ldquoA combined approach forweak fault signature extraction of rolling element bearing usingHilbert envelop and zero frequency resonatorrdquo Journal of Soundand Vibration vol 419 pp 436ndash451 2018
[47] LDuan F Zhao JWangNWang and J Zhang ldquoAn integratedcumulative transformation and feature fusion approach forbearing degradation prognosticsrdquo Shock and Vibration vol2018 Article ID 9067184 15 pages 2018
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
![Page 23: A Parameter Adaptive MOMEDA Method Based on Grasshopper ...downloads.hindawi.com/journals/mpe/2019/7182539.pdf · Normalize the distances between grasshoppers in [1,4] Update the](https://reader034.pdfslide.us/reader034/viewer/2022043017/5f399b25f2dec8453876f374/html5/thumbnails/23.jpg)
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom




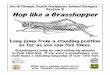

![Introduction and Intermediate - Grasshopper-[GH-102]files.mcneel.com/grasshopper/GH_2_Day_7_Hours.pdf · Introduction and Intermediate - Grasshopper-[GH-102] Target Audience This](https://img.pdfslide.us/doc/110x75/5ee07629ad6a402d666ba3d5/introduction-and-intermediate-grasshopper-gh-102files-introduction-and-intermediate.jpg)


![INTRODUCTION TO GRASSHOPPER - Amazon S3s3.amazonaws.com/mcneel/grasshopper/Grasshopper_Intro_Outline.pdf · Introduction to Grasshopper-[GH-01] INTRODUCTION TO GRASSHOPPER Block 5-Day](https://img.pdfslide.us/doc/110x75/5ada38217f8b9a137f8d3089/introduction-to-grasshopper-amazon-s3s3-to-grasshopper-gh-01-introduction-to.jpg)